Спосіб зниження енерговитрат польоту безпілотного літального апарата
Номер патенту: 91443
Опубліковано: 10.07.2014
Автори: Валуйський Станіслав Вікторович, Тачиніна Олена Миколаївна, Новіков Валерій Іванович, Лисенко Олександр Іванович, Романченко Ігор Сергійович, Кірчу Павло Іванович, Семенченко Андрій Іванович, Данилюк Сергій Леонідович, Чумаченко Сергій Миколайович, Шмаров Валерій Миколайович
Формула / Реферат
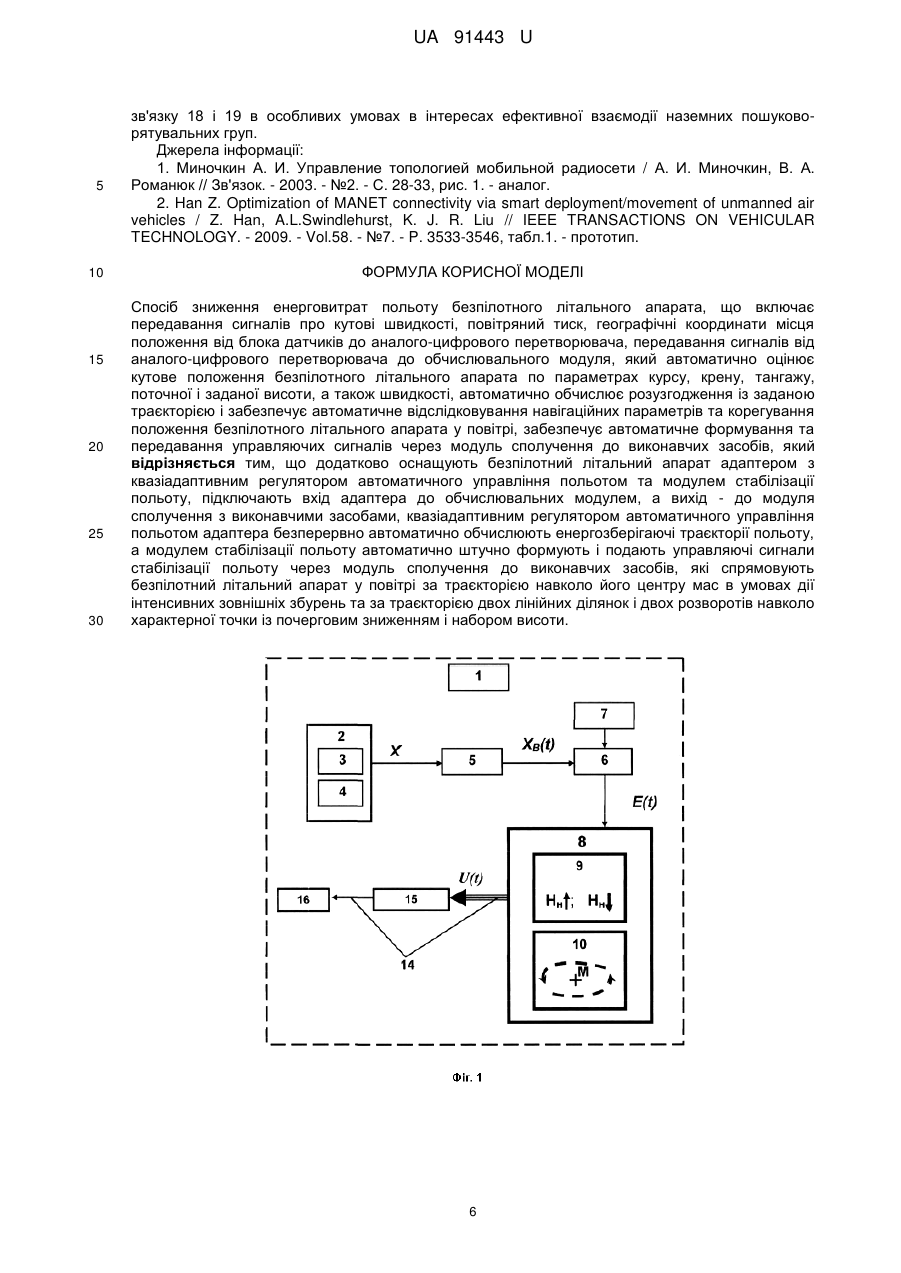
Спосіб зниження енерговитрат польоту безпілотного літального апарата, що включає передавання сигналів про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналого-цифрового перетворювача, передавання сигналів від аналого-цифрового перетворювача до обчислювального модуля, який автоматично оцінює кутове положення безпілотного літального апарата по параметрах курсу, крену, тангажу, поточної і заданої висоти, а також швидкості, автоматично обчислює розузгодження із заданою траєкторією і забезпечує автоматичне відслідковування навігаційних параметрів та корегування положення безпілотного літального апарата у повітрі, забезпечує автоматичне формування та передавання управляючих сигналів через модуль сполучення до виконавчих засобів, який відрізняється тим, що додатково оснащують безпілотний літальний апарат адаптером з квазіадаптивним регулятором автоматичного управління польотом та модулем стабілізації польоту, підключають вхід адаптера до обчислювальних модулем, а вихід - до модуля сполучення з виконавчими засобами, квазіадаптивним регулятором автоматичного управління польотом адаптера безперервно автоматично обчислюють енергозберігаючі траєкторії польоту, а модулем стабілізації польоту автоматично штучно формують і подають управляючі сигнали стабілізації польоту через модуль сполучення до виконавчих засобів, які спрямовують безпілотний літальний апарат у повітрі за траєкторією навколо його центру мас в умовах дії інтенсивних зовнішніх збурень та за траєкторією двох лінійних ділянок і двох розворотів навколо характерної точки із почерговим зниженням і набором висоти.
Текст
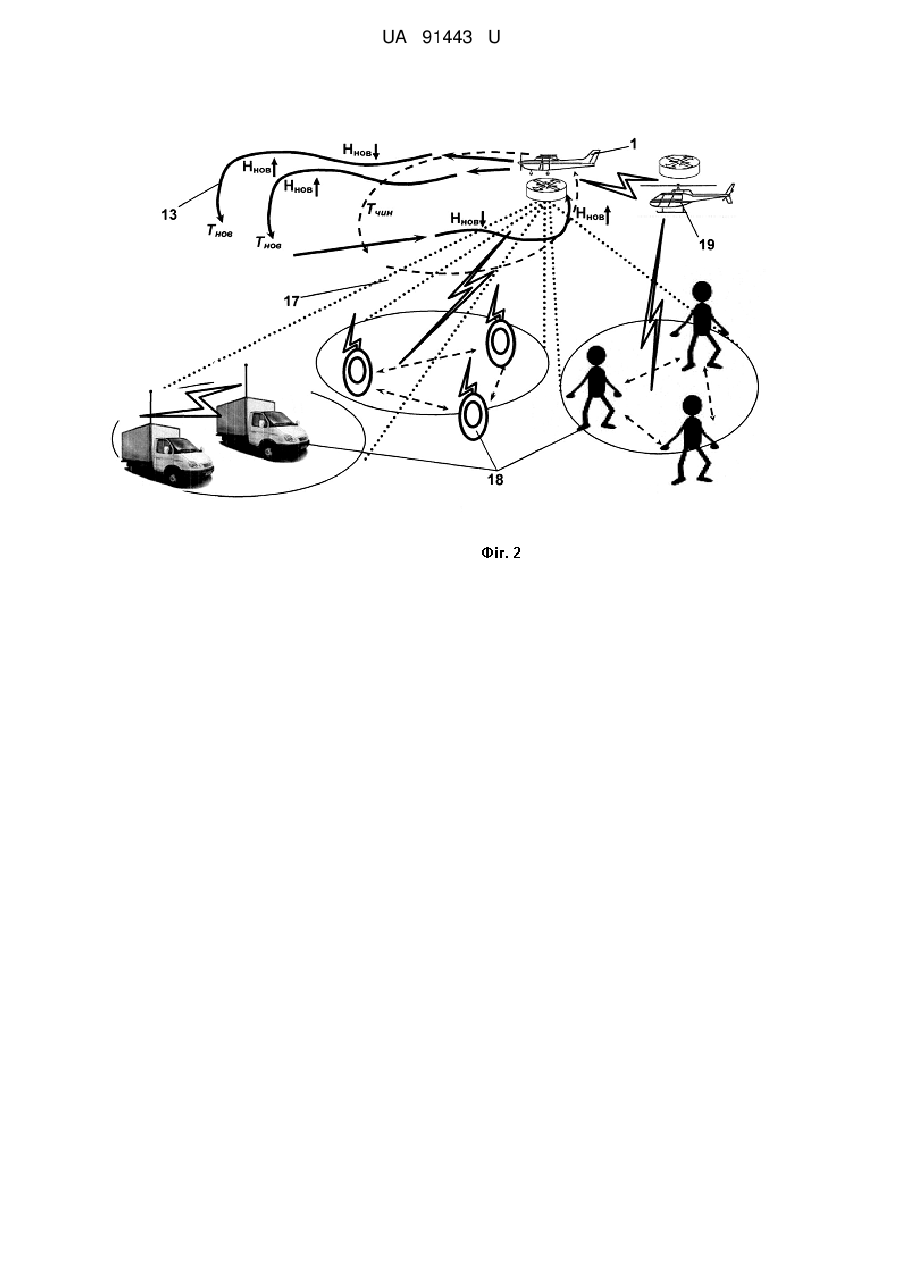
Реферат: Спосіб зниження енерговитрат польоту безпілотного літального апарата, включає передавання сигналів про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналого-цифрового перетворювача. Додатково оснащують безпілотний літальний апарат адаптером з квазіадаптивним регулятором автоматичного управління польотом та модулем стабілізації польоту. UA 91443 U (12) UA 91443 U UA 91443 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до технологій енергозбереження та організації тривалого зв'язку на основі застосування адаптивних та оптимальних по енерговитратах засобів керування польотом ретрансляційних аероплатформ на базі безпілотних літальних апаратів з урахуванням всіх нелінійностей типу насичення в умовах турбулентної атмосфери та невизначеностей параметрів. Спосіб зниження енерговитрат під час польоту безпілотного літального апарата доцільно застосовувати для економії льотного ресурсу (ресурсів) та забезпечення тривалого зв'язку в районах зі зруйнованою або відсутньою інфраструктурою, наприклад, в зоні надзвичайної ситуації природного чи техногенного характеру для ефективного функціонування мобільних засобів зв'язку в особливих умовах в інтересах ефективної взаємодії наземних пошуково-рятувальних груп. Відомий спосіб управління топологією мобільної епізодичної радіомережі, за яким збирають інформацію про стан та параметри функціонування мережі або її зони, застосовують один з відомих методів маршрутизації, розраховують та оцінюють характеристики функціонування мережі, находять нову топологію мережі у випадку відхилення параметрів функціонування від допустимих значень, реалізують певну ціль управління вузла, доводять до вузлів прийняте рішення, змінюють потужність передачі або направленість антени терміналу мобільного абонента [1]. Недоліками відомого способу управління топологією мобільної епізодичної радіомережі є те, що для реалізації способу змінюють потужність передачі та направленість антени вузлів мережі, що не забезпечує енергоефективність та простоту реалізації елементної бази терміналів мобільних абонентів. Спосіб забезпечує зв'язність локальної групи абонентів, але не забезпечує зв'язність розосереджених груп мобільних абонентів. Спосіб не забезпечує вирішення задачі великої розмірності. Основними недоліками існуючої системи зв'язку управління є: низька мобільність вузлів зв'язку пунктів управління; невиконання вимог продуктивності, надійності, забезпечення радіозв'язку між мобільними абонентами; невиконання ймовірнісно-часових характеристик інформаційного обміну; низька автоматизація процесів встановлення, ведення та підтримки радіозв'язку; моральна та фізична застарілість засобів радіозв'язку. Найбільш близьким способом як за суттю, так і за завданнями, що вирішуються, яке вибране за найближчий прототип, є спосіб оптимізації зв'язності мобільних епізодичних радіомереж із інтелектуальним розміщенням (переміщенням) безпілотних літальних апаратів, за яким в повітря піднімають один безпілотний літальний апарат, утворюють на земній поверхні зону радіопокриття фіксованого радіуса, ретранслюють сигнали, забезпечують епізодичний зв'язок між мобільними абонентами радіомережі, збирають дані про поточне розміщення мобільних абонентів в центрі управління, будують мінімальне кістякове дерево графа мережі та визначають ступені структурної зв'язності епізодичної радіомережі, визначають координати початкового розміщення одного безпілотного літального апарата, розміщують один безпілотний літальний апарат в одній з випадково генерованих точок простору або в центрі мас наземних вузлів мережі, визначають координати остаточного розміщення одного безпілотного літального апарата методом градієнтного спуску [2]. Недоліками відомого способу є те, що спосіб не забезпечує автономну маневреність безпілотних літальних апаратів у повітряному просторі в умовах турбулентної атмосфери. Спосіб не забезпечує зниження енерговитрат під час польотів та не забезпечує радіозв'язок більшої тривалості порівняно з чинною в особливих умовах в інтересах ефективної взаємодії наземних абонентів та абонентів, які перебувають у повітрі. Спосіб не забезпечує стійкість радіозв'язку між мобільними абонентами в разі їх швидкого та непередбачуваного переміщення або виникнення непередбачених ситуацій. В основу корисної моделі поставлено задачу за рахунок змінювання чинних та здійснення додаткових технологічних операцій щодо оснащення безпілотних літальних апаратів додатковим обладнанням, а також автоматичного подавання сигналів від обчислювальних до виконавчих засобів стабілізації польоту у повітрі забезпечити польоти безпілотних літальних апаратів за оперативно обчисленими та заданими траєкторіями, покращити автономну маневреність безпілотних літальних апаратів у повітряному просторі в умовах турбулентної атмосфери, забезпечити зниження енерговитрат польотів та забезпечити радіозв'язок більшої тривалості порівняно з чинною для тривалого та ефективного функціонування мобільних засобів зв'язку в особливих умовах в інтересах ефективної взаємодії наземних абонентів та абонентів, які перебувають у повітрі, а також уникнути переривання радіозв'язку між мобільними абонентами в разі їх швидкого та непередбачуваного переміщення або виникнення непередбачених ситуацій. 1 UA 91443 U 5 10 15 20 25 30 35 40 45 50 55 Поставлена задача вирішується тим, що в способі зниження енерговитрат під час польоту безпілотного літального апарата включає передавання сигналів про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналогоцифрового перетворювача, передавання сигналів від аналого-цифрового перетворювача до обчислювального модуля, який автоматично оцінює кутове положення безпілотного літального апарата по параметрам курсу, крену, тангажу, поточної і заданої висоти, а також швидкості, автоматично обчислює розузгодження із заданою траєкторією і забезпечує автоматичне відслідковування навігаційних параметрів та корегування положення безпілотного літального апарата у повітрі, забезпечує автоматичне формування та передавання управляючих сигналів через модуль сполучення до виконавчих засобів, згідно з корисною моделлю, додатково оснащують безпілотний літальний апарат адаптером з квазіадаптивним регулятором автоматичного управління польотом та модулем стабілізації польоту, підключають вхід адаптера до обчислювальних модулів, а вихід - до модуля сполучення з виконавчими засобами, квазіадаптивним регулятором автоматичного управління польотом адаптера безперервно автоматично обчислюють енергозберігаючі траєкторії польоту, а модулем стабілізації польоту автоматично штучно формують і подають управляючі сигнали стабілізації польоту через модуль сполучення до виконавчих засобів, які спрямовують безпілотний літальний апарат у повітрі за траєкторією навколо його центру мас в умовах дії інтенсивних зовнішніх збурень та за траєкторією двох лінійних ділянок і двох розворотів навколо характерної точки із почерговим зниженням і набором висоти. Оснащення безпілотного літального апарата адаптером з квазіадаптивним регулятором автоматичного управління польотом та модулем стабілізації польоту забезпечує стабілізацію оптимального його польоту навколо центру мас в умовах дії інтенсивних зовнішніх збурень, що дозволяє понизити енерговитрати на стабілізацію польоту навколо центру мас безпілотного літального апарата й на заданій траєкторії. Встановлення адаптера між обчислювальним модулем та виконавчими засобами забезпечує компактне конструктивне їх розміщення між іншим обладнанням та зручне дротове поєднання цих елементів, можливість зручного їх огляду, обслуговування, демонтажу або заміни за необхідністю. За рахунок функціонування квазіадаптивного регулятора автоматичного управління польотом забезпечується безперешкодне своєчасне приймання сигналів від обчислювального модуля, безперервне автоматичне обчислення енергозберігаючої траєкторії польоту та оперативне передавання обробленої інформації на модуль сполучення з виконавчими механізмами. За рахунок функціонування модуля стабілізації польоту забезпечується оперативне приймання сигналів від обчислювального модуля, автоматичне штучне формування і подавання управляючих сигналів стабілізації польоту навколо центру мас до виконавчих засобів і забезпечує спрямування сигналів з адаптера до виконавчих засобів, в режимі найскорішого приймання сигналів. За рахунок функціонування виконавчих засобів забезпечується оперативне автоматичне безперервне управління польотом безпілотного літального апарата за траєкторією навколо центру мас безпілотного літального апарата в умовах дії інтенсивних зовнішніх збурень та за траєкторією двох лінійних ділянок і двох розворотів навколо характерної точки із почерговим зниженням і набором висоти. Суть способу зниження енерговитрат польоту безпілотного літального апарата пояснюється ілюстраціями, де на фіг. 1 показано схему передавання сигналів адаптивного керування безпілотним літальним апаратом під час забезпечення тривалого зв'язку з мінімальними енерговитратами, а на фіг. 2 показано траєкторію польоту безпілотного літального апарата, яка забезпечує мінімальні енерговитрати, збільшує тривалість польоту та забезпечує більшу тривалість радіозв'язку між абонентами. Спосіб зниження енерговитрат польоту безпілотного літального апарата, наприклад, на якому встановлена висотна ретрансляційна аероплатформа мобільного зв'язку, реалізується так. Під час польоту безпілотного літального апарата 1 сигнали X про стан безпілотного літального апарата від блока датчиків кутових швидкостей 2, приймача повітряного тиску 3, супутникового навігаційного приймача 4 для введення в систему інформації про кутові швидкості, повітряний тиск, про географічні координати місця положення безпілотного літального апарата 1 подаються на вхід аналого-цифрового перетворювача 5, виходи якого підключають на входи обчислювального модуля 6. 2 UA 91443 U 5 Від аналого-цифрового перетворювача 5 перетворені сигнали ΧB(t) надходять до обчислювального модуля 6, який автоматично оцінює кутове положення безпілотного літального апарата 1 по параметрам курсу, крену, тангажу, поточної і заданої висоти, а також швидкості, автоматично обчислює розузгодження із заданою траєкторією E(t) = X(t) – ХM(t) і забезпечує автоматичне відслідковування навігаційних параметрів, використовуючи вхідні дані від супутникової навігаційної системи 7, та корегування положення безпілотного літального апарата 1 у повітрі. Процес керування безпілотним літальним 1 апаратом описується рівнянням стану: t t t Ut t ; (1) Ct t , 10 де X R - вектор стану БПЛА; U R - вектор керування; Υ – вектор вимірювань A(t), B(t) n n i n n m матриці параметрів БПЛА; η та ξ - вектор шумів збурень та шумів вимірювання. Бажана динаміка польоту безпілотного літального апарата 1 з висотною ретрансляційною аероплатформою (див. фіг. 2) у разі мінімізації енерговитрат керування задається за допомогою еталонної моделі: n 15 n t Rt , (2) де XM R - вектор стану еталонної моделі, R R - вектор вхідних дій, AM, ВM, СM і DM матриці відповідних розмінностей. В адаптері 8 функціонують квазіадаптивний регулятор 9 автоматичного управління польотом та модуль 10 стабілізації польоту. Обчислювальний модуль 6 взаємодіє з квазіадаптивним регулятором 9 автоматичного управління польотом адаптера 8 ураховує складові турбулентного вітру, послідовність включення виконавчих засобів 16 (див. фіг. 1) та обчислює оптимальну по енерговитратах траєкторію 13 польоту (див. фіг. 2), а модуль 9 стабілізації польоту (на позиції 10 фіг. 1 позначено як +М з переривчастими стрілками у вигляді півкіл), розміщений у адаптері 8, обчислює траєкторію польоту навколо центру мас безпілотного літального апарата в умовах дії інтенсивних зовнішніх збурень формує ідеальні управляючі сигнали 14 U(t) і подає їх через модуль сполучення 15 до виконавчих засобів 16 (див. фіг. 1). Наприклад, квазіадаптивний регулятор 9 автоматичного управління польотом та модуль 10 стабілізації польоту ураховує повздовжню складову турбулентного вітру n 20 25 30 u s u 2Lu V m 1 , L 1 u s V (3) 1 p s w 6 4b 0,8 , 1 V 4b L3 1 s w V (4) бокову складову турбулентного вітру 35 v s v L 1 3 v s Lv V , V L 2 v 1 V s (5) вертикальну складову турбулентного вітру 3 UA 91443 U w s w L 1 3 w s Lw V , 2 V Lw s 1 V (6) s V q s w s . 4b 1 s V 5 (7) де b - розмах крила літака; Lu, Lv, Lw - відповідні масштаби турбулентності; σu, σν, σw середньоквадратичні відхилення відповідних компонентів швидкості. Також квазіадаптивний регулятор 8 автоматичного управління польотом та модуль 10 стабілізації польоту ураховує послідовність включення виконавчих засобів 16 так (див. фіг.1): x t x t ut (8) yt Cx t Du t де ч R - вектор стану, u R - вхідний вектор, y R – вихідний вектор, x0 R - вектор стану в момент часу t=t0, а А, В, С і D – матриці відповідних розмінностей. Квазіадаптивний регулятор 9 автоматичного управління польотом та модуль 10 стабілізації польоту адаптера 8 автоматично формують ідеальні сигнали 13 управління польотом безпілотного літального апарата 1 з мінімальними енерговитратами за рахунок використання функцій Ляпунова та методу градієнтного спуску за умови відомих параметрів безпілотного літального апарата 1 з висотною ретрансляційною аероплатформою. Один із ідеальних сигналів керування 13 з мінімальними енерговитратами описується так: n 10 15 m p Ut t RRt , або Ut t Rt , R R де , , , рівнянням: 20 Х R R R (10) R (11) ВМ =АМ-А, B = BM 25 30 Таким чином, квазіадаптивний регулятор 9 автоматичного управління польотом та модуль 9 стабілізації польоту адаптера 8 забезпечують автоматичне формування та передавання ідеальних управляючих сигналів 14 (9) через модуль сполучення 15 до виконавчих засобів 16. Оптимальна енергозберігаючуа траєкторія польоту 13 як формалізована ціль керування розв'язується за рахунок функціонування квазіадаптивного регулятора 9 автоматичного управління польотом (див. фіг. 1)), який визначає найменшу динаміку енерговитрат безпілотного літального апарата 1 (оптимальну енергозберігаючу траєкторію польоту 13) (див. фіг. 2).: im t 0 , (12) t 35 (9) - матриці ідеальних коефіцієнтів регулятора, які задовольняють ВК = АМ-А, BK =BM n де E(t) = X(t) – ХM(t) - похибка системи (2) і (3). Під час функціонування квазіадаптивного регулятора 9 автоматичного управління польотом та модуля 10 стабілізації польоту для корегування динаміки польоту безпілотного літального апарата розв'язується задача визначення оптимального управління u(t) на інтервалі [t0, tf], так, щоб була мінімальна наступна функція вартості: J0 x t0 , t0 tf x t T x t ut ut dt x t f f x t f , t0 4 (13) UA 91443 U nxn 5 10 15 20 25 30 35 40 45 50 nxn nxn де а ψ є R і а Фf є R - симетричні невід'ємно-визначені матриці, а Ф є R - симетрична невід'ємно-визначена матриця. Оптимальна енергозберігаюча траєкторія польоту 13 описується (12) з урахуванням впливу чинників польоту на безпілотний літальний апарат 1 (турбулентності вітру, кутових швидкостей, повітряного тиску, географічних координат місця положення тощо) та послідовності включення виконавчих засобів 16 (див. фіг. 1 та фіг. 2). Технічний результат досягається завдяки додатковому застосуванню квазіадаптивної системи автоматичного управління (адаптера 8, у складі якого функціонують квазіадаптивний регулятор 9 автоматичного управління польотом та модуль 10 стабілізації польоту), в якій штучно обчислюється (1-12) та створюється ідеальний сигнал (9) нелінійного зворотного зв'язку (ідеальний сигнал 13 (9) керування з мінімальними енерговитратами (13)). Цей сигнал 13 складається з результату множення виміряного абсолютного значення змінної що стабілізується, на величину її відхилення від еталонного значення помноженого на нестаціонарний масштабований множник, за рахунок чого удається понизити енерговитрати на стабілізацію польоту безпілотного літального апарата i з висотною ретрансляційною аероплатформою навколо центру мас на заданій траєкторії 13 (на позиції 10 фіг. 1 позначено як +М з переривчастими стрілками у вигляді півкіл) в умовах дії інтенсивних збурень. Суттєвою особливістю функціонування додатково встановленого обладнання 8, 9, 10 керування безпілотним літальним апаратом 1, наприклад, з висотною ретрансляційною аероплатформою є властивість забезпечувати нову ідеальну траєкторію польоту 13 навколо його центру мас (на позиції 10 фіг. 1 позначено як +М) в умовах дії інтенсивних зовнішніх збурень та за траєкторією двох лінійних ділянок і двох розворотів навколо характерної точки із почерговим зниженням Ηнов і набором висоти Ннов, порівняно з чинною 17, та зберігати її у разі змінювання координатних і параметричних збурень в широких межах (див. фіг. 2). Економія енерговитрат (13) під час польоту безпілотного літального апарата з висотною ретрансляційною аероплатформою досягається за рахунок зменшення сили лобового опору під час польоту на лінійних ділянках траєкторії і за рахунок використання потенційної енергії безпілотного літального апарата 1, яка у разі розвороту переходить в кінетичну, що спричиняє збільшення швидкості польоту і можливості здійснювати розворот на 180 зі зниженням Ηнов та з подальшим набором висоти Ннов з найменшими витратами енергії порівняно з координованим польотом. Відомо, що безпілотний літальний апарат, наприклад, "Альбатрос" під час польоту тривалістю Тчин = 200 хвилин зі швидкістю 60 км/год. за чинною траєкторією (на фіг. 2 чинна траєкторія показана переривчастою стрілкою у вигляді півкола та позначена як Т чин) 17 витрачає 2 кг палива. Реалізація способу зниження енерговитрат під час польоту безпілотного літального апарата 1 за новою траєкторією 13 забезпечує збільшення тривалості до 40 хвилин та становить Тнов = 240 хвилин (на фуг. 2 нова обчислена пропонована траєкторія показана суцільною стрілкою у вигляді півкола зі зниженням Ηнов та з подальшим набором висоти Н нов та позначена як Тнов). Таким чином, під час польоту безпілотного літального апарата 1 з адаптером 8, який містить квазіадаптивний регулятор автоматичного управління польотом 9 та модуль 10 стабілізації польоту, тривалістю 200 хвилин економія палива складатиме 0,4 кг, тобто зменшиться на 20 % від встановленої виробником витрати палива (13). Водночас, зекономлене паливо забезпечить продовження польоту 40 хвилин за новою траєкторією 13, а загальна тривалість уже становитиме 240 хвилин, тобто збільшиться на 20 % від встановленої виробником тривалості ТЧИІ, польоту. Показані на фіг.2 три суцільні стрілки нової траєкторії польоту у вигляді півкіл з поворотами зниженнями та наборами висоти, порівняно з двома переривчастими стрілками чинної траєкторії польоту, свідчать про більшу тривалість Т нов польоту за новою траєкторією порівняно з тривалістю Тчин польоту за координованою траєкторією: Тнов > Тчин 55 (14) Отже, реалізація способу забезпечить економію (13) льотного ресурсу (ресурсів), тобто, лише один безпілотний літальний апарат 1 з висотною ретрансляційною аероплатформою може забезпечити більший час мобільного зв'язку Тнов порівняно з чинним Тчин (14) між наземними абонентами 18 або абонентами, що перебувають у повітрі 19, в районах зі зруйнованою або відсутньою інфраструктурою, наприклад, в зоні надзвичайної ситуації природного чи техногенного характеру для ефективного функціонування мобільних засобів 5 UA 91443 U 5 10 15 20 25 30 зв'язку 18 і 19 в особливих умовах в інтересах ефективної взаємодії наземних пошуковорятувальних груп. Джерела інформації: 1. Миночкин А. И. Управление топологией мобильной радиосети / А. И. Миночкин, В. А. Романюк // Зв'язок. - 2003. - №2. - С. 28-33, рис. 1. - аналог. 2. Han Z. Optimization of MANET connectivity via smart deployment/movement of unmanned air vehicles / Z. Han, A.L.Swindlehurst, K. J. R. Liu // IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY. - 2009. - Vol.58. - №7. - P. 3533-3546, табл.1. - прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб зниження енерговитрат польоту безпілотного літального апарата, що включає передавання сигналів про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналого-цифрового перетворювача, передавання сигналів від аналого-цифрового перетворювача до обчислювального модуля, який автоматично оцінює кутове положення безпілотного літального апарата по параметрах курсу, крену, тангажу, поточної і заданої висоти, а також швидкості, автоматично обчислює розузгодження із заданою траєкторією і забезпечує автоматичне відслідковування навігаційних параметрів та корегування положення безпілотного літального апарата у повітрі, забезпечує автоматичне формування та передавання управляючих сигналів через модуль сполучення до виконавчих засобів, який відрізняється тим, що додатково оснащують безпілотний літальний апарат адаптером з квазіадаптивним регулятором автоматичного управління польотом та модулем стабілізації польоту, підключають вхід адаптера до обчислювальних модулем, а вихід - до модуля сполучення з виконавчими засобами, квазіадаптивним регулятором автоматичного управління польотом адаптера безперервно автоматично обчислюють енергозберігаючі траєкторії польоту, а модулем стабілізації польоту автоматично штучно формують і подають управляючі сигнали стабілізації польоту через модуль сполучення до виконавчих засобів, які спрямовують безпілотний літальний апарат у повітрі за траєкторією навколо його центру мас в умовах дії інтенсивних зовнішніх збурень та за траєкторією двох лінійних ділянок і двох розворотів навколо характерної точки із почерговим зниженням і набором висоти. 6 UA 91443 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюChumachenko Serhii Mykolaiovych
Автори російськоюЧумаченко Сергей Николаевич
МПК / Мітки
МПК: H04W 8/08, H04W 28/08, H04W 16/10, H04W 8/02, H04W 84/00
Мітки: безпілотного, енерговитрат, апарата, зниження, польоту, спосіб, літального
Код посилання
<a href="https://ua.patents.su/9-91443-sposib-znizhennya-energovitrat-polotu-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб зниження енерговитрат польоту безпілотного літального апарата</a>
Система стабілізації безпілотного літального апарата
Номер патенту: 65285
Опубліковано: 25.11.2011
Автори: Субота Анатолій Максимович, Льовкін Сергій Генадійович, Кописов Олег Едуардович
МПК: B64C 13/00
Мітки: система, літального, безпілотного, стабілізації, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить послідовно з'єднані обчислювач, підсилювач, рульову машину, орган управління та датчик кута, датчик кутової швидкості, яка відрізняється тим, що містить задатчик, вихід якого з'єднаний з входом обчислювача, вихід рульової машини одночасно з'єднаний з входом органа управління і через перший перетворювач з'єднаний з входом адаптивного контура, а вихід органа управління з'єднаний...
Система дистанційного управління рухом безпілотного літального апарата
Номер патенту: 81370
Опубліковано: 25.06.2013
Автори: Коваль Олександр Васильович, Тупіцин Микола Федорович, Матійчик Денис Михайлович
МПК: B64C 13/16, B64C 19/00, B64C 13/00
Мітки: безпілотного, літального, апарата, дистанційного, управління, система, рухом
Формула / Реферат:
Система дистанційного управління рухом безпілотного літального апарата, яка складається з системи автоматичного управління, відеокамери, пристрою управління відеокамери, геореєстратора, аерокартографа, відеоархіву на борту літального апарата, радіолінії та наземної апаратури з радіолінією, апаратури формування команд управління безпілотним літальним апаратом, дисплеєм зовнішнього пілота і відеоархіву зовнішнього пілота, яка відрізняється...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Антошик Вікторія Миколаївна, Амелін Сергій Вікторович, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: літального, стабілізації, безпілотного, система, апарата
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Спосіб ведення повітряної розвідки за допомогою безпілотного літального апарата
Номер патенту: 31235
Опубліковано: 25.03.2008
Автори: Гордієвський Олексій Тихонович, Жованик Борис Євгенович, Василенко Олександр Васильович, Бондарчук Сергій Вікторович, Комаров Володимир Олександрович, Анпьонов Валентин Вадимович, Слободенюк Сергій Йосипович, Куровська Тетяна Юріївна, Андрійченко Олег Станіславович, Яйчук Микола Семенович, Лапицький Сергій Володимирович, Машталір Вадим Віталійович, Чучмій Андрій Володимирович, Васюхина Валентина Олексіївна, Сендецький Микола Миколайович
МПК: H04B 7/185, B64C 31/00
Мітки: ведення, спосіб, повітряної, апарата, безпілотного, літального, допомогою, розвідки
Формула / Реферат:
Спосіб ведення повітряної розвідки за допомогою безпілотного літального апарата, при якому підготовляють безпілотний літальний апарат, що містить вбудоване навігаційне устаткування та систему GPS, підготовляють розвідувальне устаткування і розгортають пункт прийому розвідувальної інформації, встановлюють розвідувальне устаткування на безпілотний літальний апарат, проводять зліт безпілотного літального апарата із установленим на ньому...
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Бойко Євгенія Анатоліївна, Симонов Володимир Федорович
МПК: G05D 1/03
Мітки: система, літального, безпілотного, апарата, кутової, стабілізації, відмовостійка
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Попередній патент: Велосипедна рама
Наступний патент: Система обробки знань
Випадковий патент: Пристрій для дослідження токсичності продуктів горіння