Спосіб гнуття труб
Номер патенту: 9668
Опубліковано: 30.04.1999
Формула / Реферат
1. Способ гибки труб с получением U-образного колена заданной кривизны, включающий зажатие подлежащего гибке участка трубы между передним и задним зажимами, связанными гибким элементом, который располагают с наружной относительно центра кривизны колена стороны трубы, осевое осаживание зажатого участка путем натяжения гибкого элемента и изгибание осаживаемого участка путем воздействия на него изгибающим моментом с перемещением трубы во всех ее сечениях, начиная от переднего зажима, по криволинейной траектории, отличающийся тем, что трубу перемещают по траектории, совпадающей с формой получаемого колена, усилие осевого осаживания задают таким образом, чтобы касательные напряжения в стенке трубы на наружной относительно центра кривизны ее стороне были сжимающими или нулевыми, причем трубу удерживают от отклонений в сторону центра кривизны колена в начале криволинейной траектории путем оттягивания от нее гибкого элемента и от отклонений в сторону от этого центра.
2. Способ по п. 1, отличающийся тем, что траекторию перемещения трубы задают путем последовательного по мере их перехода на криволинейную траекторию соединения переднего зажима и следующих за ним звеньев гибкого элемента жесткими тягами одинаковой длины с осью, установленной в центре кривизны колена.
3. Способ по п. 1, отличающийся тем, что траекторию перемещения трубы задают путем перемещения гибкого элемента, начиная от переднего зажима, по двум направляющим, совпадающим пс форме с получаемым коленом и расположенным наружной относительно центра кривизны колена стороны трубы на расстоянии друг от друга, большем наружного диаметра трубы.
4. Способ по пп. 1 или 2, или 3, отличающийся тем, что трубу удерживают от перемещений к центру кривизны колена путем воздействия на задний зажим изгибающим усилием, поворачивающим его в плоскости гиба в направлении гибу, на угол 0,5 - 2.
Текст
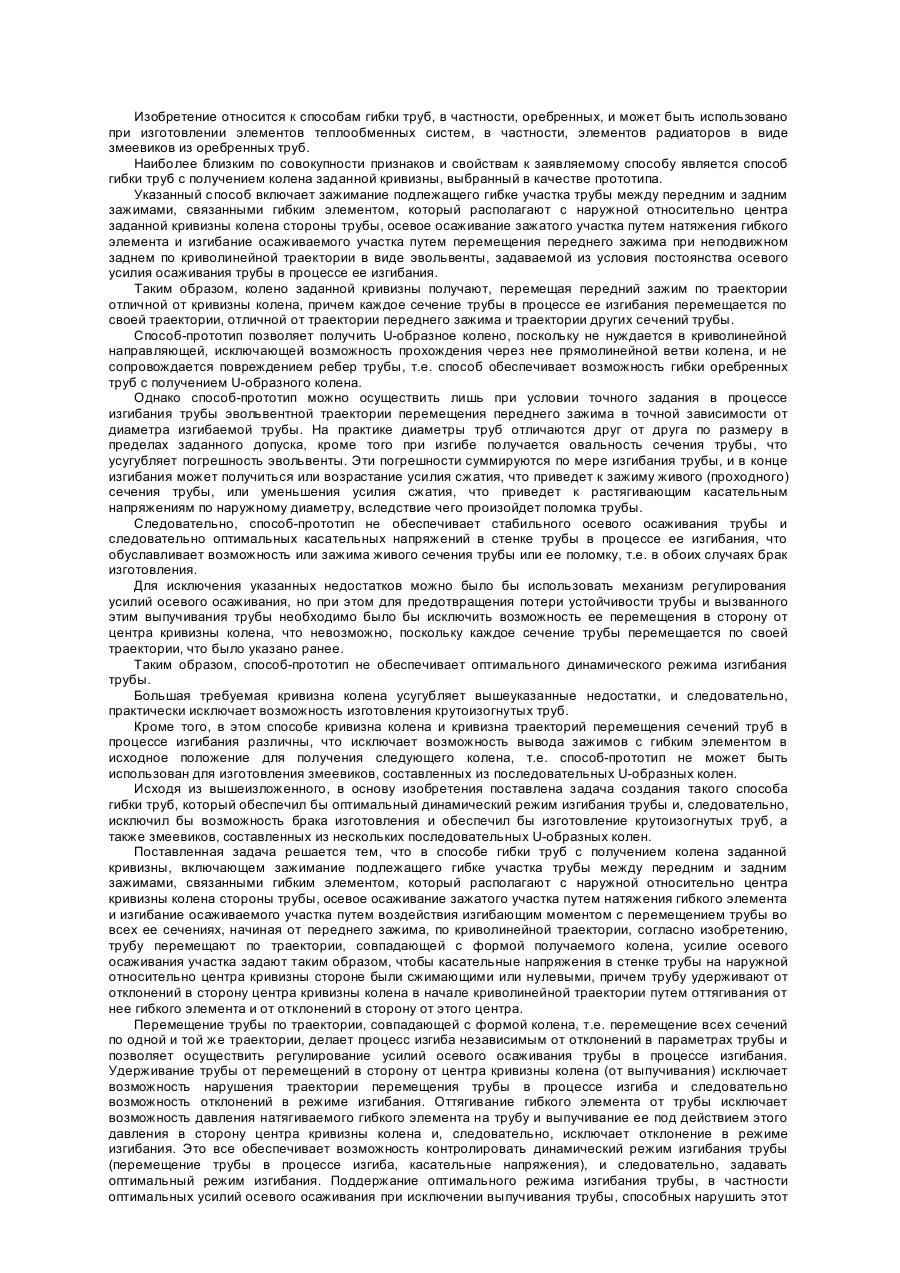
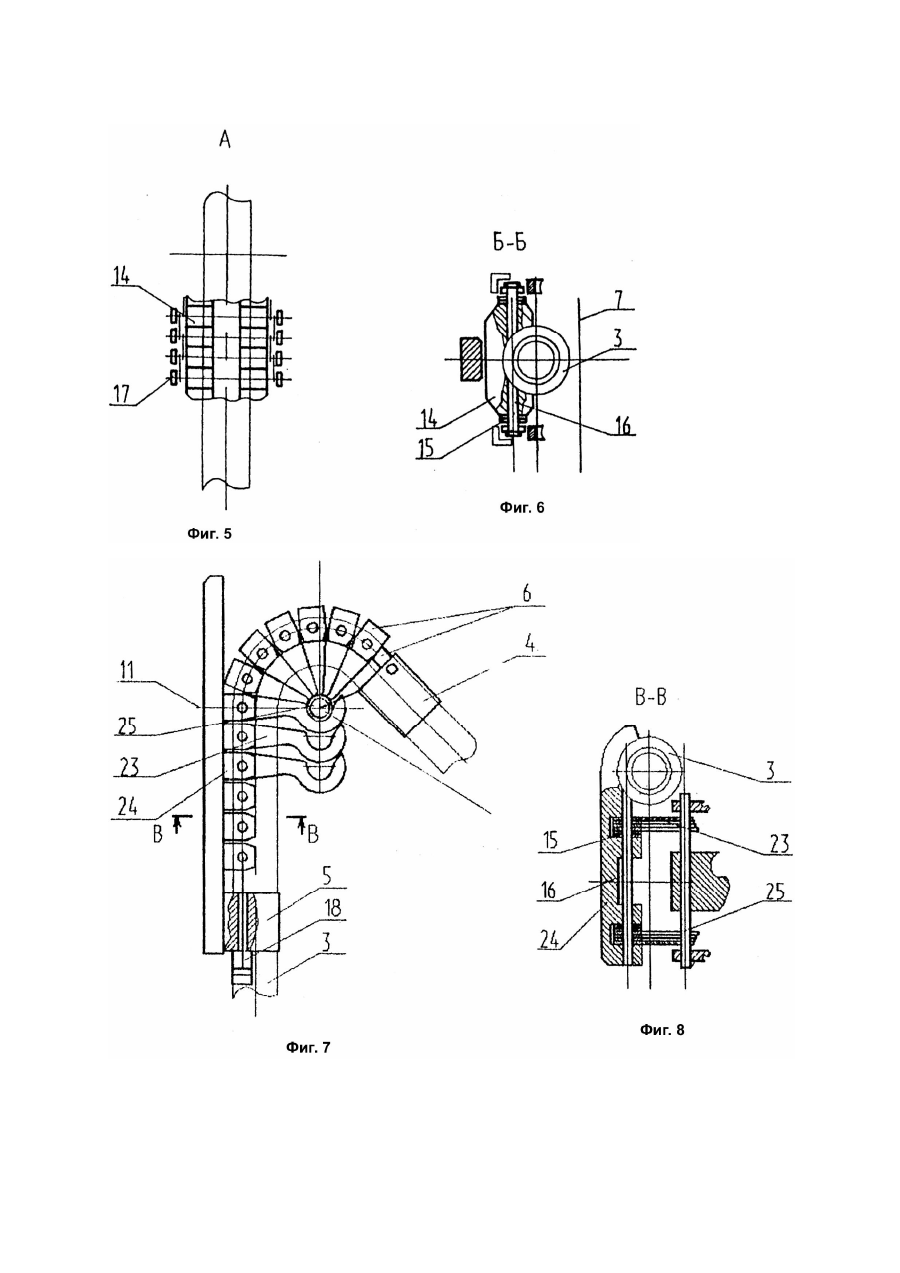
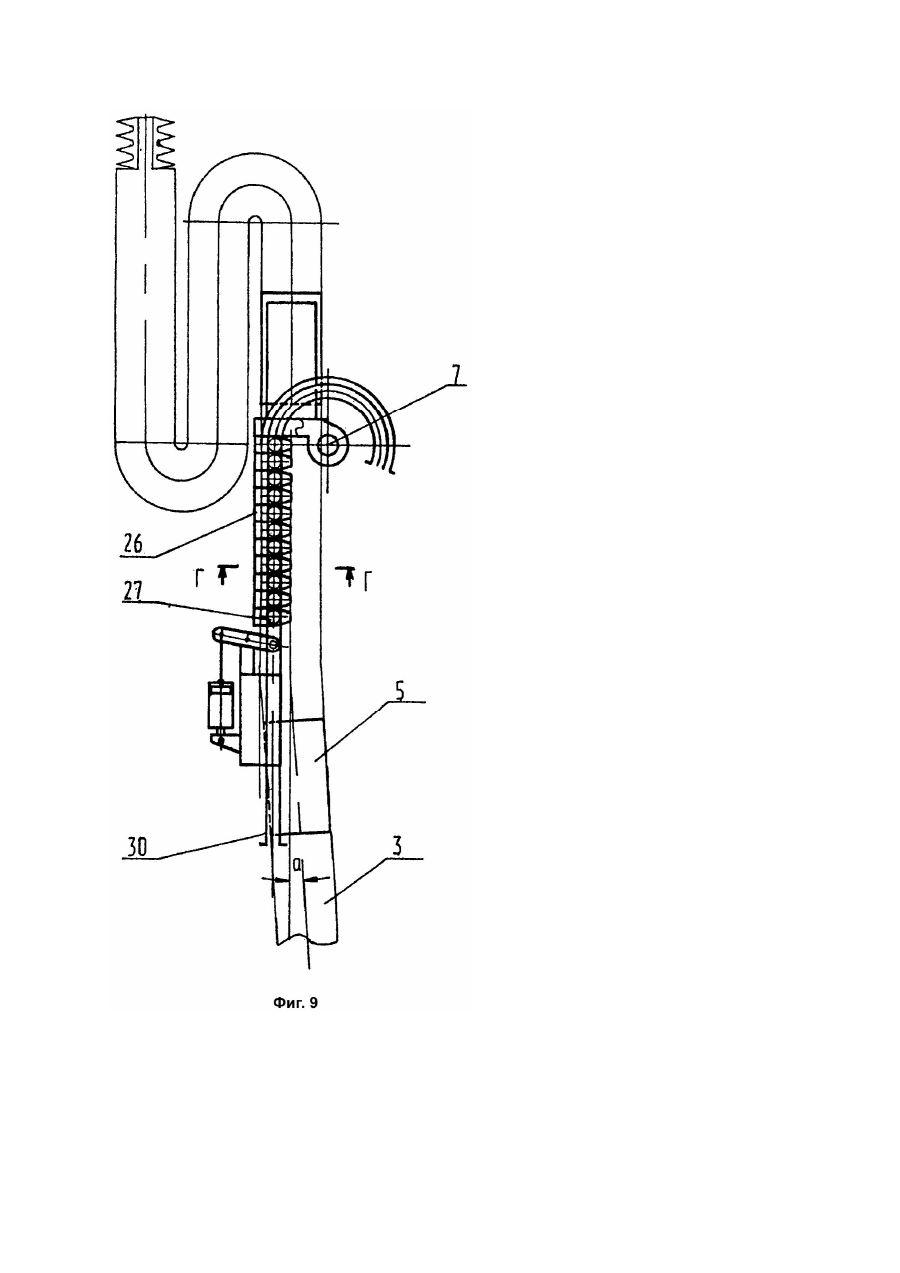
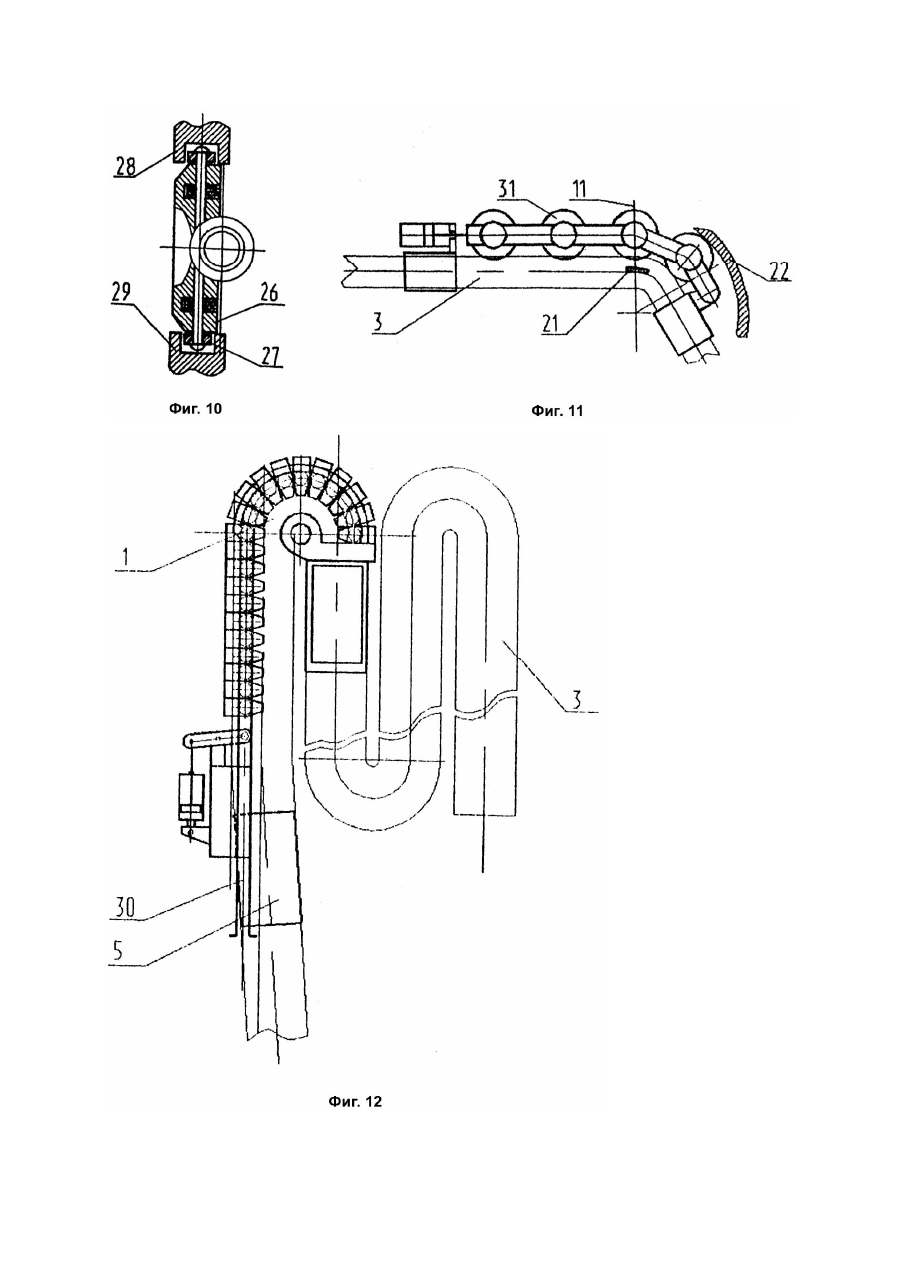
Изобретение относится к способам гибки труб, в частности, оребренных, и может быть использовано при изготовлении элементов теплообменных систем, в частности, элементов радиаторов в виде змеевиков из оребренных труб. Наиболее близким по совокупности признаков и свойствам к заявляемому способу является способ гибки труб с получением колена заданной кривизны, выбранный в качестве прототипа. Указанный способ включает зажимание подлежащего гибке участка трубы между передним и задним зажимами, связанными гибким элементом, который располагают с наружной относительно центра заданной кривизны колена стороны трубы, осевое осаживание зажатого участка путем натяжения гибкого элемента и изгибание осаживаемого участка путем перемещения переднего зажима при неподвижном заднем по криволинейной траектории в виде эвольвенты, задаваемой из условия постоянства осевого усилия осаживания трубы в процессе ее изгибания. Таким образом, колено заданной кривизны получают, перемещая передний зажим по траектории отличной от кривизны колена, причем каждое сечение трубы в процессе ее изгибания перемещается по своей траектории, отличной от траектории переднего зажима и траектории других сечений трубы. Способ-прототип позволяет получить U-образное колено, поскольку не нуждается в криволинейной направляющей, исключающей возможность прохождения через нее прямолинейной ветви колена, и не сопровождается повреждением ребер трубы, т.е. способ обеспечивает возможность гибки оребренных труб с получением U-образного колена. Однако способ-прототип можно осуществить лишь при условии точного задания в процессе изгибания трубы эвольвентной траектории перемещения переднего зажима в точной зависимости от диаметра изгибаемой трубы. На практике диаметры труб отличаются друг от друга по размеру в пределах заданного допуска, кроме того при изгибе получается овальность сечения трубы, что усугубляет погрешность эвольвенты. Эти погрешности суммируются по мере изгибания трубы, и в конце изгибания может получиться или возрастание усилия сжатия, что приведет к зажиму живого (проходного) сечения трубы, или уменьшения усилия сжатия, что приведет к растягивающим касательным напряжениям по наружному диаметру, вследствие чего произойдет поломка трубы. Следовательно, способ-прототип не обеспечивает стабильного осевого осаживания трубы и следовательно оптимальных касательных напряжений в стенке трубы в процессе ее изгибания, что обуславливает возможность или зажима живого сечения трубы или ее поломку, т.е. в обоих случаях брак изготовления. Для исключения указанных недостатков можно было бы использовать механизм регулирования усилий осевого осаживания, но при этом для предотвращения потери устойчивости трубы и вызванного этим выпучивания трубы необходимо было бы исключить возможность ее перемещения в сторону от центра кривизны колена, что невозможно, поскольку каждое сечение трубы перемещается по своей траектории, что было указано ранее. Таким образом, способ-прототип не обеспечивает оптимального динамического режима изгибания трубы. Большая требуемая кривизна колена усугубляет вышеуказанные недостатки, и следовательно, практически исключает возможность изготовления крутоизогнутых труб. Кроме того, в этом способе кривизна колена и кривизна траекторий перемещения сечений труб в процессе изгибания различны, что исключает возможность вывода зажимов с гибким элементом в исходное положение для получения следующего колена, т.е. способ-прототип не может быть использован для изготовления змеевиков, составленных из последовательных U-образных колен. Исходя из вышеизложенного, в основу изобретения поставлена задача создания такого способа гибки труб, который обеспечил бы оптимальный динамический режим изгибания трубы и, следовательно, исключил бы возможность брака изготовления и обеспечил бы изготовление крутоизогнутых труб, а также змеевиков, составленных из нескольких последовательных U-образных колен. Поставленная задача решается тем, что в способе гибки труб с получением колена заданной кривизны, включающем зажимание подлежащего гибке участка трубы между передним и задним зажимами, связанными гибким элементом, который располагают с наружной относительно центра кривизны колена стороны трубы, осевое осаживание зажатого участка путем натяжения гибкого элемента и изгибание осаживаемого участка путем воздействия изгибающим моментом с перемещением трубы во всех ее сечениях, начиная от переднего зажима, по криволинейной траектории, согласно изобретению, трубу перемещают по траектории, совпадающей с формой получаемого колена, усилие осевого осаживания участка задают таким образом, чтобы касательные напряжения в стенке трубы на наружной относительно центра кривизны стороне были сжимающими или нулевыми, причем трубу удерживают от отклонений в сторону центра кривизны колена в начале криволинейной траектории путем оттягивания от нее гибкого элемента и от отклонений в сторону от этого центра. Перемещение трубы по траектории, совпадающей с формой колена, т.е. перемещение всех сечений по одной и той же траектории, делает процесс изгиба независимым от отклонений в параметрах трубы и позволяет осуществить регулирование усилий осевого осаживания трубы в процессе изгибания. Удерживание трубы от перемещений в сторону от центра кривизны колена (от выпучивания) исключает возможность нарушения траектории перемещения трубы в процессе изгиба и следовательно возможность отклонений в режиме изгибания. Оттягивание гибкого элемента от трубы исключает возможность давления натягиваемого гибкого элемента на трубу и выпучивание ее под действием этого давления в сторону центра кривизны колена и, следовательно, исключает отклонение в режиме изгибания. Это все обеспечивает возможность контролировать динамический режим изгибания трубы (перемещение трубы в процессе изгиба, касательные напряжения), и следовательно, задавать оптимальный режим изгибания. Поддержание оптимального режима изгибания трубы, в частности оптимальных усилий осевого осаживания при исключении выпучивания трубы, способных нарушить этот оптимальный режим, позволяет до минимума свести зажим живого сечения трубы (при превалировании напряжений сжатия) или поломки трубы в результате возникновения трещин (при превалировании напряжений растяжения) и, следовательно, исключает возможность брака изготовления. Увеличение кривизны трубы не может повлиять на режим изгибания, что делает заявленный способ пригодным для изготовления крутоизогнутых труб. Также как и способ-прототип, заявленный способ не предусматривает силового взаимодействия трубы непосредственно с направляющей, что позволяет использовать способ для изготовления оребренных труб. Перемещение трубы в процессе изгибания по траектории, совпадающей с формой колена, обеспечивает возможность возврата зажимов с гибким элементом в исходное положение для получения следующего колена, следовательно, способ позволяет получить змеевики составленные из нескольких U-образных колен. Таким образом, заявленный способ позволяет изготавливать змеевики из крутоизогнутых оребренных труб. Целесообразно траекторию трубы задавать, ограничивая перемещение гибкого элемента на прямолинейном участке планкой закрепленной на ползуне, поступательно перемещающегося совместно с задним зажимом, а на криволинейном участке упором в виде башмака, или ролика, оттягивающего гибкий элемент от перемещения к центру кривизны в начале криволинейного участка и от центра кривизны путем воздействия направляющими в виде полуокружностей, расположенных по обе стороны изгибаемой трубы. Целесообразно задавать траекторию перемещения трубы путем последовательного, по мере перехода, на криволинейную траекторию, соединения звеньев гибкого элемента жесткими тягами с осью, установленной в центре кривизны колена. Звенья гибкого элемента, таким образом, удерживают изгибаемую трубу от выпучивания (перемещения от центра кривизны), обеспечивая ее перемещение во всех сечениях по траектории, совпадающей с формой колена. Направляющие на прямолинейном участке обеспечивают поступательное перемещение заднего зажима и препятствуют смещению звеньев гибкого элемента в сторону от центра кривизны, а на криволинейном удерживают гибкий элемент от смещения к центру в начале криволинейного участка и от центра на всем криволинейном участке, обеспечивая таким образом; как и в предыдущих вариантах, перемещение трубы во всех ее сечениях по траектории совпадающей с формой колена. Во всех приведенных вариантах перемещение трубы можно осуществлять или воздействием осевым усилием на задний зажим в сторону переднего, или вращением водила, одним концом поворотно установленном в центре кривизны колена, а другим связанным с передним зажимом. Приведенные варианты осуществления перемещения трубы по криволинейной траекторий, совпадающей с формой колена, не исчерпывают всех возможностей. Для гладкой трубы траекторию перемещения можно задавать путем воздействия на трубу с наружной относительно центра кривизны колена ее стороны роликами, которые прокатываются по кривой, эквидистантной форме изогнутого колена, что делает правомерным обобщенный признак "трубу перемещают в процессе ее изгибания по траектории, совпадающей с формой получаемого колена". Во всех приведенных случаях на прямолинейном участке целесообразно удерживать трубу от перемещения в сторону кривизны колена, возникающем при потери устойчивости трубы от осевого сжатия, путем воздействия на задний зажим изгибающим моментом, поворачивающим его в плоскости гиба, в направлении обратном гибу, на угол 0,5 - 2°, т.е. трубу заставляют терять устойчивость в направлении гибкого элемента, удерживающего ее от перемещения. Заявляемый способ поясняется чертежами, где: на фиг.1 представлена схема осуществления способа; на фиг.2 схема усилий в процессе гиба; на фиг.3 поперечное сечение трубы с эпюрой напряжений; на фиг.4 схема устройства для осуществления способа по первому варианту; на фиг.5 вид А на фиг.4 по первому варианту; на фиг.6 сечение Б - Б на фиг.4 по первому варианту; на фиг.7 схема устройства для осуществления способа по второму варианту; на фиг.8 сечение В - В на фиг.7 по второму варианту; на фиг.9 схема устройства для осуществления способа по третьему варианту; исходное положение; на фиг.10 сечение Г - Г на фиг.9 по третьему варианту; на фиг.11 схема устройства для осуществления способа по четвертому варианту; гибка неоребренной трубы; на фиг.12 схема устройства для осуществления способа по третьему варианту; конечное положение. Способ гибки труб с получением колена 1 (фиг.1) заданной кривизны включает зажимание подлежащего гибке участка 2 трубы 3 между передним 4 и задним 5 зажимами, связанными гибким элементом 6, который располагают с наружной относительно центра 7 заданной кривизны колена 1, стороны трубы 3, осевое осаживание участка 2 путем натяжения гибкого элемента 6 и изгибания участков 2 путем воздействия изгибающим моментом с перемещением трубы 3 во всех ее сечениях, начиная от переднего зажима 4, по криволинейной траектории совпадающей с формой получаемого колена 1; усилие осевого осаживания 9 задают таким образом, чтобы касательные напряжения 10 (фиг.3) в стенке трубы 3 на наружной, относительно центра 7 кривизны колена 1, стороне были сжимающими или нулевыми, причем трубу 3 удерживают от отклонения в сторону от центра 7 в начале 11 (фиг.2) криволинейной траектории путем оттягивания от нее гибкого элемента б усилием 12 и отклонений в сторону от этого центра 7 усилиями 13, приложенными к гибкому элементу 6. Гибкий элемент 6 (фиг.1) составлен из звеньев 14 (фиг.4 - 6), соединенных между собой планками 15 с помощью осей 16. Каждое звено 14 охватывает трубу 3 с наружной, относительно центра 7 заданной кривизны колена на осях 16 установлены ролики 17. Один конец гибкого элемента закреплен на переднем зажиме 4, а другой пропущен через отверстия в заднем зажиме 5 и прикреплен к штоку 18 пневмоцилиндра (гидроцилиндра) 19, закрепленного на заднем зажиме 5. Задний зажим 5 закреплен на ползуне 20, который передвигаясь в пазах корпуса (не показан), обеспечивает поступательное перемещение заднего зажима 5 и препятствует смещению звеньев 14 гибкого элемента в сторону от центра кривизны 7. Натяжение гибкого элемента 6 (фиг.1) для осевого осаживания участка 2 трубы 3 осуществляют пневмоцилиндром (гидроцилиндром) 19 (фиг.4 - 6). При этом гибкий элемент 6 (фиг.1 - 2) создает усилие 9, вызывающие сжатие участка 2 трубы 3 и, следовательно, утолщение стенки трубы 3, компенсирующее растяжение стенки на наружной стороне трубы 3, в процессе ее изгибания. Осевое усилие 9 устанавливают и автоматически поддерживают в заданном режиме за счет изменения давления в пневмоцилиндре 19 (фиг.4 - 6) (гидроцилиндре) таким образом, чтобы растягивающие усилия, обусловленные изгибающим моментом, и снимающие усилия, обусловленные осевым осаживанием, компенсировали друг друга на наружной стороне трубы и эпюра напряжений в сечении трубы имела вид представленный на фиг.3, т.е. чтобы касательные напряжения на наружной стороне изгибаемой трубы были минимально сжимающими. Изгибающие усилия на трубу в момент перехода ее на криволинейную траекторию задают воздействием звеньев 14 гибкого элемента. При этом в начале гиба перемещение гибкого элемента в сторону центра кривизны ограничивают упорами 21 в виде башмаков или роликов, по которым перекатываются ролики 17, препятствуя смещению гибкого элемента в сторону к центру кривизны. При дальнейшем перемещении звеньев гибкой связи ролики 17 перекатываются по направляющим 22, препятствуя перемещению гибкого элемента от центра кривизны. Изгибающие усилия на трубу в момент перехода ее на криволинейную траекторию можно задавать воздействием звеньев 21 (фиг.7 - 8) гибкого элемента 6, траекторию которых на криволинейном участке обеспечивают жесткие тяги 23, закрепленные на передних звеньях 24 и входящие в зацепление с осью 25, установленной в центре кривизны 7, ограничивая тем самым перемещение гибкого элемента 6 к центру кривизны в начале 11 криволинейного участка, где происходит изгибание трубы. В дальнейшем обеспечивают продвижение согнутых участков без деформаций по заданной траектории, путем воздействия на гибкий элемент 6, не допуская его перемещения в сторону от центра кривизны. Таким образом, изгибаясь на заданный радиус в начале гиба при дальнейшем продвижении согнутые участки продвигаются по кривой без деформации, что обуславливает качественно согнутое колено. Изгибающие усилия на криволинейной траектории можно задавать путем перемещения звеньев 26 (фиг.8 - 10, 12) с помощью роликов 27, закрепленных на звеньях с двух сторон и перекатывающихся по пазам верхней 28 и нижней 29 планок. Пазы выполнены по прямолинейной, переходящей в криволинейную траекториям, совпадающим по форме с полученным в результате гибки коленом трубы. Пазы планок на прямолинейном участке 30 обеспечивают поступательное перемещение заднего зажима 5 и препятствуют смещению гибкого элемента в сторону от центра кривизны 7, т.е. выполняют ту же роль, что и планки в первом варианте. Пазы криволинейного участка удерживают трубу от отклонений в сторону центра кривизны колена в начале криволинейной траектории и от отклонения от центра кривизны на остальном криволинейном участке. На фиг.9 обозначен угол = 0,5 - 2° разворота изгибаемой труб 3 от воздействия заднего зажима 5 при приложении к нему изгибающего момента в сторону обратную направлению изгибания трубы. Изгибающее усилие при гибке гладкой (неоребренной) трубы 3 можно задавать воздействием непосредственно на трубу роликом 31 (фиг.11). Также как и в первом варианте (фиг.4), перемещение роликов 31 к центру кривизны в начале 11 криволинейной траектории ограничивают применением упора 21, а от центра воздействием направляющих 22.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for pipes bending
Автори англійськоюLuniov Henadii Vasyliovych, Sychov Petro Heorhiiovych
Назва патенту російськоюСпособ сгибания труб
Автори російськоюЛунев Геннадий Васильевич, Сычов Петр Георгиевич
МПК / Мітки
МПК: B21D 7/00
Код посилання
<a href="https://ua.patents.su/7-9668-sposib-gnuttya-trub.html" target="_blank" rel="follow" title="База патентів України">Спосіб гнуття труб</a>
Пристрій для гнуття труб з індукційним нагрівом
Номер патенту: 3879
Опубліковано: 27.12.1994
Автори: Пуриш Валентин Захарович, Михайлюк Олександр Якович, Петрушенко Володимир Омельянович
МПК: B21D 7/00
Мітки: нагрівом, труб, індукційним, гнуття, пристрій
Формула / Реферат:
Устройство для гибки труб с индукционным нагревом, содержащее станину, установленный на станине инструментальный блок с механизмами захвата, зажима, поворота трубы, трубогибочного механизма с приводом его поворота и нагревателем в виде разъемного индуктора и систему управления, отличающееся тем, что станина выполнена в виде вертикального технологического ротора, причем оно снабжено расположенным на последнем преобразователем регулируемой...
Спосіб локалізації руйнування металевих зварних труб для магістральних трубопроводів
Номер патенту: 18777
Опубліковано: 25.12.1997
Автор: Шмуклер Йосип Срулевіч
МПК: F16L 9/00
Мітки: локалізації, трубопроводів, труб, спосіб, зварних, руйнування, магістральних, металевих
Формула / Реферат:
Способ локализации разрушения металлических сварных труб для магистральных трубопроводов, при котором на корпус трубы приваривают по спирали упрочняющий элемент, отличающийся тем, что упрочняющий элемент нагревают и навивают с натяжением по всей длине трубы, причем каждый виток упрочняющего элемента приваривают по мере очередности навивки с обеих сторон каждого продольного сварного шва трубы вне термических зон этого шва.
Рогоподібний сердечник для гнуття труб
Номер патенту: 18565
Опубліковано: 25.12.1997
Автори: Євтушенко Іван Маркович, Бондар Володимир Миколайович, Клименко Микола Олексійович, Галинкин Євгеній Аркадійович, Бобух Олександр Анатолійович, Фельдман Олександр Ісаакович
МПК: B21D 9/00
Мітки: рогоподібний, сердечник, труб, гнуття
Формула / Реферат:
Рогообразный сердечник для гибки труб, содержащий стержень, имеющий прямолинейную и криволинейную части с плоскими боковыми поверхностями, расположенными симметрично плоскости гиба и оболочку выполненную в виде отдельных обечаек, образующих заходной, формообразующий и калибрующий участки, с посадочными прорезями, имеющими плоские боковые поверхности, посредством которых они посажены на стержень, отличающийся тем, что стержень выполнен с...
Спосіб футерування труб гнучкими шлангами
Номер патенту: 13188
Опубліковано: 28.02.1997
Автори: Бекер Лев Едуардович, Олещук Владіслав Іванович
МПК: B29C 63/26, F16L 58/02
Мітки: спосіб, шлангами, футерування, труб, гнучкими
Формула / Реферат:
(57) 1. Способ футерования труб гибкими шлангами, заключающийся в введении гибкого шланга с зазором в металлическую трубу и его отбортовке на фланцы трубы, отличающийся тем, что гибкий шланг отбортовывают по концам перед введением его в футеруемую трубу, а после введения шланга в трубу между фланцами трубы и отбортовкой устанавливают защитную прокладку.2. Способ по п. 1, отличающийся тем, что в качестве материала прокладки используют...
Спосіб з’єднання труб з термопластів
Номер патенту: 2652
Опубліковано: 26.12.1994
Автори: Малінін Альберт Леонідович, Самородницький Давид Єйхинович, Ротенфельд Веніамін Соломонович
МПК: B29C 65/18
Мітки: з'єднання, труб, термопластів, спосіб
Формула / Реферат:
Способ соединения труб из термопластов, при котором соединяемый конец одной из труб нагревают, формуют на нем раструб путем растяжения в радиальном направлении и приводят соединяемые концы труб в контакт, отличающийся тем, что формование раструба на конце одной из труб производят одновременно с нагревом, а приведение соединяемых труб в контакт осуществляют путем навинчивания сформованного конца одной трубы на соединяемый конец второй...
Попередній патент: Двохдиапазонний регулятор тиску
Наступний патент: Електропередача постійного струму
Випадковий патент: Модифікована сушінням активована кислотою вибілююча земля, спосіб її отримання та застосування