Пристрій для виміру натягу та нахилу каната
Номер патенту: 97929
Опубліковано: 26.03.2012
Автори: Євсюков Сергій Олександрович, Чехлатий Микола Олександрович, Грицаєнко Антон Юрійович, Годар Олександр Андрійович, Демченко Микола Петрович

Формула / Реферат
Пристрій для виміру нахилу та натягу каната, що містить датчик натягу каната, перший корпус, прикріплений до головного каната над причіпним пристроєм піднімальної посудини, усередині якого встановлені джерело живлення, мікроконтролер, триосьовий акселерометр, три інформаційних виходи якого з'єднані відповідно з першим, другим і третім інформаційними входами мікроконтролера, два світлодіоди, анод першого з'єднаний з першим цифровим виходом мікроконтролера, анод другого - із другим цифровим виходом, катоди - з мінусом джерела живлення, а плюс джерела живлення з'єднаний із шиною живлення, приймач-передавач, вхід і вихід послідовного інтерфейсу якого з'єднаний з відповідним виходом і входом мікроконтролера відповідно до винаходу, який відрізняється тим, що в нього додатково введений триосьовий гіроскоп, три інформаційних виходи якого з'єднані із четвертими, п'ятим і шостим інформаційними входами мікроконтролера, датчик температури, інформаційний вихід якого з'єднаний із сьомим інформаційним входом мікроконтролера, вимикач кнопковий, один кінець якого з'єднаний з мінусом джерела живлення, а другий - з першим цифровим входом мікроконтролера, два джерела опорної напруги, перший і другий підсилювач, виходи яких з'єднані відповідно з восьмим і дев'ятим інформаційними входами мікроконтролера, третій і четвертий цифрові виходи якого відповідно через перше і друге джерело опорної напруги з'єднані із входами керування першого та другого підсилювача, вхід підстроювання коефіцієнта підсилення першого підсилювача з'єднаний з п'ятим цифровим виходом мікроконтролера, а вхід підстроювання коефіцієнта підсилення другого підсилювача - із шостим цифровим виходом мікроконтролера, сьомий, восьмий та дев'ятий цифрові виходи останнього з'єднані відповідно із входами керування триосьового гіроскопа, а десятий, одинадцятий і дванадцятий цифрові виходи відповідно з'єднані із входами керування триосьового акселерометра, перший і другий аналогові виходи мікроконтролера є аналоговими виходами відповідно натягу та нахилу каната, а датчик натягу складається із двох магніточутливих мікросхем і магніту, розташованого усередині першого корпуса, причому перша магніточутлива мікросхема розташована в другому корпусі й прикріплена до головного каната вище першого корпуса, а друга магніточутлива мікросхема розташована в третьому корпусі й прикріплена до головного каната нижче першого корпуса, перший вхід першої магніточутливої мікросхеми є першим входом датчика натягу каната та з'єднаний із тринадцятим цифровим виходом мікроконтролера, а другий вхід - є другим входом датчика натягу каната й з'єднаний із чотирнадцятим цифровим виходом мікроконтролера, перший і другий виходи датчика натягу каната є відповідно виходами першої й другої магніточутливої мікросхем і з'єднані відповідно з вимірювальними входами першого й другого підсилювача.
Текст
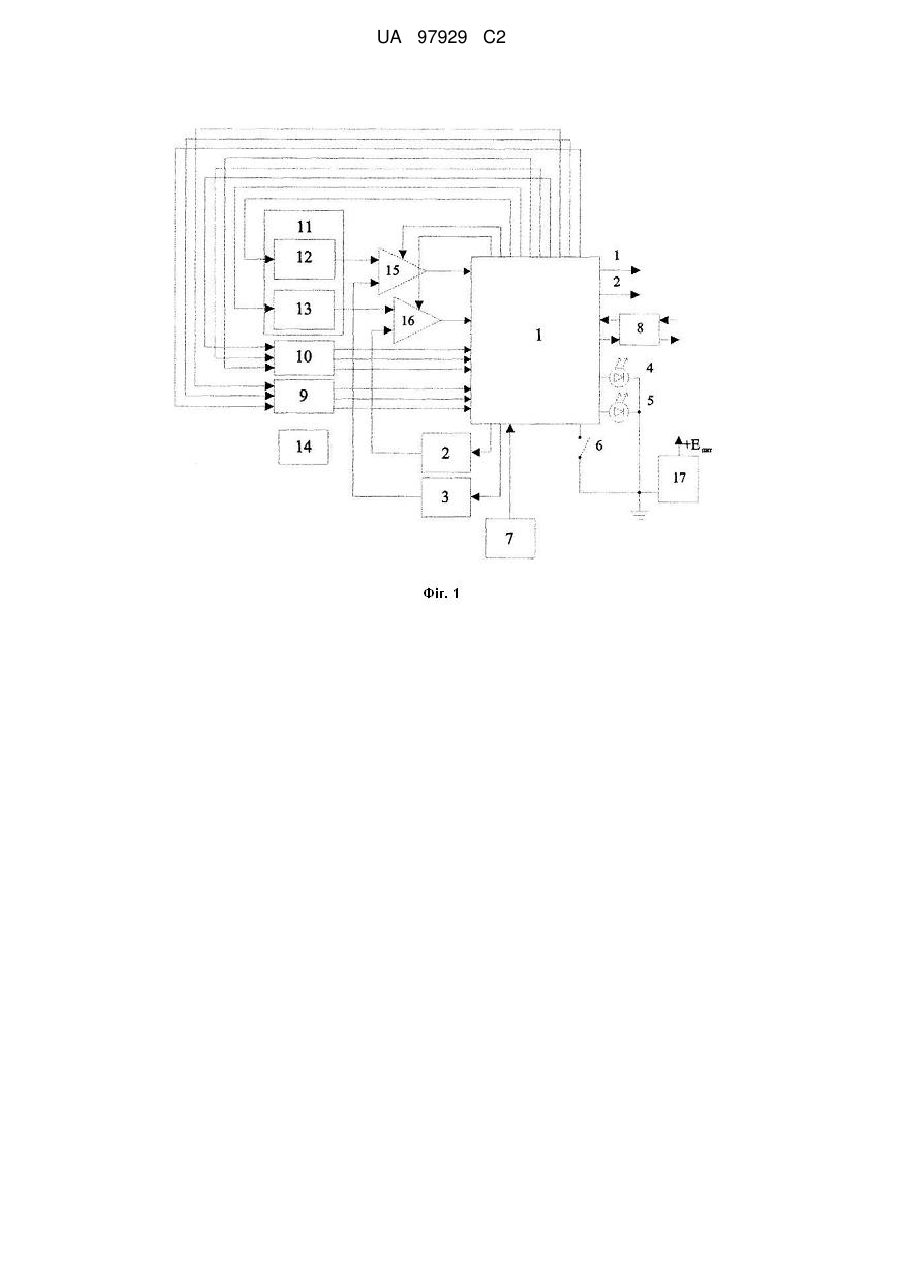
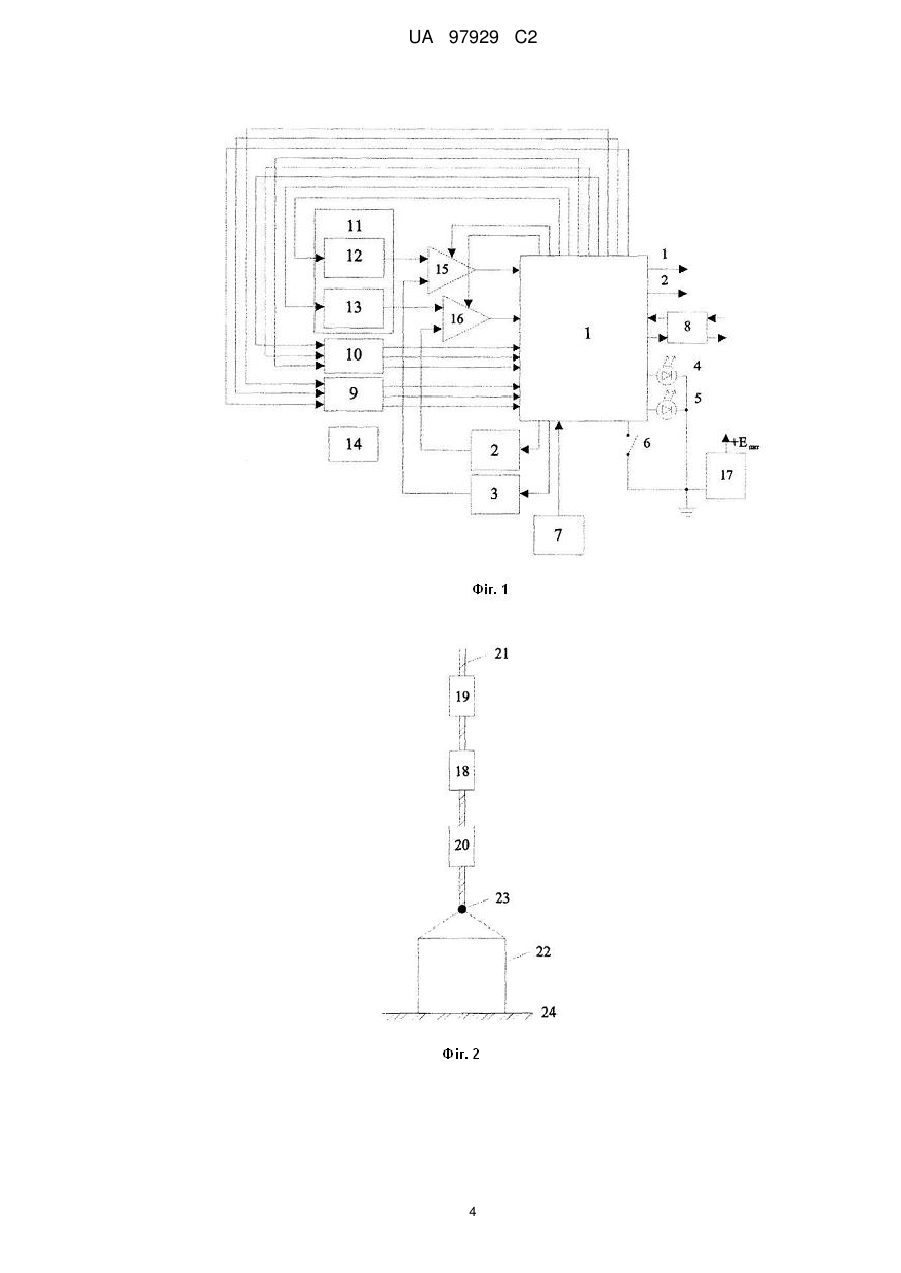
Реферат: Пристрій для виміру натягу та нахилу каната містить мікроконтролер, триосьовий акселерометр, приймач-передавач, вхід-вихід послідовного інтерфейсу якого з'єднаний з відповідним виходом-входом мікроконтролера, триосьовий гіроскоп, інформаційні виходи якого з'єднані із четвертими, п'ятими й шостим інформаційними входами мікроконтролера, датчик температури, вимикач кнопковий, один кінець якого з'єднаний з мінусом джерела живлення, а другий з першим цифровим входом мікроконтролера, два джерела опорної напруги, датчик натягу каната складається із двох магніточутливих мікросхем і магніту. Пристрій дозволяє усунути помилку виміру, обумовлену накладенням вертикальних і горизонтальних коливань каната, а за допомогою датчика температури корегуються результати вимірів. UA 97929 C2 (12) UA 97929 C2 UA 97929 C2 5 10 15 20 25 30 35 40 45 50 55 60 Пристрій належить до області вимірювальної техніки та може бути використаний в контрольно-вимірювальній апаратурі вантажопідйомних механізмів, зокрема, для виміру натягу та нахилу каната в шахтних піднімальних установках. Відомий пристрій для виміру натягу каната [1], який забезпечує підвищення точності виміру шляхом зменшення величини деформації каната. Пристрій містить раму із силовимірювачем, три опорних елементи для каната, розташовані уздовж рами, плоскі пружини, на яких встановлені два крайніх опорних елементи, а в кожному із трьох опорних елементів виконана циліндрична напрямна канавка для каната. До недоліку пристрою варто віднести неможливість контролю нахилу каната. Найбільш близьким по технічній суті до винаходу є пристрій для виміру натягу та нахилу каната [2], що містить датчик натягу каната, перший корпус, прикріплений до головного каната над причіпним пристроєм підіймальної посудини, усередині якого встановлені джерело живлення, мікроконтролер, триосьовий акселерометр, три інформаційних виходи якого з'єднані відповідно з першим, другим і третім інформаційними входами мікроконтролера, два світлодіоди, анод першого з'єднаний з першим цифровим виходом мікроконтролера, анод другого - з другим цифровим виходом, катоди - з мінусом джерела живлення, а плюс джерела живлення з'єднаний із шиною живлення, приймач-передавач, вхід і вихід послідовного інтерфейсу якого з'єднаний з відповідним виходом і входом мікроконтролера. Пристрій забезпечує вимір нахилу каната за допомогою акселерометра, що визначає відхилення пристрою від гравітаційної вертикалі. Однак, при коливаннях каната в горизонтальній площині, перпендикулярній напрямку руху, виникає помилка виміру, пропорційна прискоренню в цій площині. Основна складова помилки при цьому в багато разів перевищує дані вимірювань. Виникає похибка визначення орієнтації каната, що затрудняє керування піднімальною машиною в реальному часі. У пристрої також не забезпечується компенсація помилок первинної інформації датчиків нахилу, що виникають при взаємному накладенні горизонтальної та вертикальної складових коливань каната. Крім того, величина помилки вимірювання нахилу пристрою залежить від температури навколишнього середовища, а відсутність температурної компенсації приводить до дрейфу "нуля" акселерометрів, що знижує точність вимірювань. До недоліку даного пристрою варто також віднести застосування тензодатчиків для виміру натягу каната й "триточкову" схему самого силовимірювача. При використанні таких датчиків на піднімальних установках можливо їхнє руйнування внаслідок деформацій механічної частини від перевантажень. У моменти останову або підйому посудини (вантажу) навантаження на канат і, як наслідок, на тензодатчик збільшується в кілька разів. Задачею винаходу є безперервний контроль нахилу й натягу каната, з компенсацією нестабільності показань акселерометрів (мікромеханічних інерційних датчиків) у складних умовах експлуатації (широкий температурний діапазон, великі швидкості й прискорення, необхідність надійної й стабільної роботи в аварійних умовах). Це дозволяє підвищити точність вимірів нахилу, натягу каната, і забезпечити надійну роботу при перевантаженнях, розширити область застосування пристрою. Поставлена задача вирішується тим, що в пристрій для виміру нахилу та натягу каната, що містять датчик натягу каната, перший корпус, прикріплений до головного каната над причіпним пристроєм піднімальної посудини, усередині якого встановлені джерело живлення, мікроконтролер, триосьовий акселерометр, три інформаційних виходи якого з'єднані з першим, другим і третімінформаційними входами мікроконтролера, два світлодіоди, анод першого з'єднаний з першим цифровим виходом мікроконтролера, анод другого - із другим цифровим виходом, катоди - з мінусом джерела живлення, а плюс джерела живлення з'єднаний із шиною живлення, приймач-передавач, вхід і вихід послідовного інтерфейсу якого з'єднаний з відповідним виходом і входом мікроконтролера відповідно до винаходу, у нього додатково уведений триосьовий гіроскоп, три інформаційних виходи якого з'єднані із четвертими, п'ятим і шостим інформаційними входами мікроконтролера, датчик температури, Інформаційний вихід якого з'єднаний із сьомим інформаційним входом мікроконтролера, вимикач кнопковий, один кінець якого з'єднаний з мінусом джерела живлення, а другий - з першим цифровим входом мікроконтролера, два джерела опорної напруги, перший І другий підсилювач, виходи яких з'єднані відповідно з восьмим і дев'ятим інформаційними входами мікроконтролера, третій і четвертий цифрові виходи якого відповідно через перше і друге джерело опорної напруги з'єднані із входами керування першого та другого підсилювача, вхід підстроювання коефіцієнта підсилення першого підсилювача з'єднаний з п'ятим цифровим виходом мікроконтролера, а вхід підстроювання коефіцієнта підсилення другого підсилювача - із шостим цифровим виходом 1 UA 97929 C2 5 10 15 20 25 30 35 40 45 50 55 мікроконтролера, сьомий, восьмий та дев'ятий цифрові виходи останнього з'єднані відповідно із входами керування триосьового гіроскопа, а десятий, одинадцятий і дванадцятий цифрові виходи відповідно з'єднані із входами керування триосьового акселерометра, перший і другий аналогові виходи мікроконтролера є аналоговими виходами відповідно натягу та нахилу каната, а датчик натягу складається із двох магніточутливих мікросхем і магніту, розташованого усередині першого корпуса, причому перша магніточутлива мікросхема розташована в другому корпусі й прикріплена до головного каната вище першого корпуса, а друга магніточутлива мікросхема розташована в третьому корпусі й прикріплена до головного каната нижче першого корпуса, перший вхід першої магніточутливої мікросхеми є першим входом датчика натягу каната та з'єднаний із тринадцятим цифровим виходом мікроконтролера, а другий вхід - є другим входом датчика натягу каната й з'єднаний із чотирнадцятим цифровим виходом мікроконтролера, перший і другий виходи датчика натягу каната є відповідно виходами першої й другої магніточутливої мікросхем і з'єднані відповідно з вимірювальними входами першого й другого підсилювача. Введення гіроскопа в пристрій дозволяє усунути помилку вимірювань, обумовлену накладенням вертикальних і горизонтальних коливань каната, а датчик температури забезпечує корегування результатів вимірів з урахуванням змін температури. Суть винаходу пояснюється кресленнями, де зображені: на фіг. 1 - блок схема пристрою для виміру натягу та нахилу каната; на фіг. 2 - розташування корпусів пристрою. Пристрій для виміру натягу та нахилу каната містить: мікроконтролер 1, джерела опорної напруги 2, 3, світлодіоди 4 і 5, вимикач кнопковий 6, датчик температури 7, приймач-передавач 8, триосьовий акселерометр 9, триосьовий гіроскоп 10, датчик натягу 11, магніточутливі мікросхеми 12 і 13, магніт 14, підсилювачі 15 і 16, джерело живлення 17, перший, другий і третій корпус 18, 19 і 20, головний канат 21, посудина 22, причіпний пристрій 23 і тверда основа 24. Пристрій для виміру натягу та нахилу каната працює наступним чином. Після установки корпусів 18, 19 і 20 на головний канат 21 над причіпним пристроєм 23 і подачі напруги живлення +ЕЖИВ починається виконання керуючої програми мікроконтролера 1, що формує тестові сигнали для магніточутливих мікросхем 12 і 13, триосьового гіроскопа 10 і триосьового акселерометра 9, а також сигнали керування джерелами опорної напруги 2 і 3. Після цього відбувається зчитування інформації з аналогових входів мікроконтролера 1 з наступним аналізом справності. Після виконання команди тестування виконується калібрування пристрою шляхом натискання кнопкового вимикача 6 (головний канат 21 без провисань у цей момент повинен бути розвантажений, тобто піднімальна посудина 22 установлена на тверду основу 24), У цьому режимі мікроконтролер 1 опитує всі інформаційні входи, визначаючи вихідний стан пристрою. Аналізуючи інформацію з виходів триосьового гіроскопа 10, триосьового акселерометра 9 і датчика температури 7 мікроконтролер 1 вимірює поточні показання для даного режиму. Одночасно відбувається підстроювання коефіцієнтів підсилення підсилювачів 15 і 16 шляхом зміни коефіцієнтів підсилення й величин сигналів керування на виходах джерела опорної напруги 2 і 3. Після установки вихідного стану кнопковий вимикач 6 відключається, в результаті чого пристрій підготовлено до роботи. Після зняття посудини із твердої підстави 24 датчиком натягу каната 11, за допомогою магніточутливих мікросхемам 12 і 13 (наприклад, датчики Хола з підсилювачами), виміряється натяг каната по величині зміни магнітного поля, створюваного магнітом 14. За допомогою триосьового гіроскопа 10 і триосьового акселерометра 9 виміряється поточне положення каната щодо вертикалі. Мікроконтролер 1 порівнює поточні показання з каліброваними, визначаючи кут нахилу. При цьому за допомогою триосьового гіроскопа 10 і датчика температури 7 відбувається корегування показань акселерометра 9, що виникають при накладенні горизонтальних і вертикальних коливань на результати вимірів. На підставі аналізу отриманих даних виконуються обчислення в реальному часі поточного кута відхилення каната від вертикальної осі, а також натяг каната, які надходять на цифровий приймач-передавач 8, а аналогові значення натягу каната в кН та кута нахилу в градусах або радіанах надходять відповідно на аналогові виходи 1 і 2 мікроконтролера 1. Світлодіоди 4 і 5 призначені для візуального контролю відповідно нахилу й натягу каната й включаються при досягненні встановленого граничного значення вимірюваних величин. Приймач-передавач 8 призначений для передачі інформації в автоматизовану систему керування технологічними процесами підприємства для моніторингу стану головного каната 21. 2 UA 97929 C2 5 10 Запропоноване технічне рішення забезпечує вимір нахилу й натягу каната та дозволяє усунути помилку виміру, обумовлену накладенням вертикальних і горизонтальних коливань каната. Крім того, введення в пристрій датчика температури дозволяє усунути помилку виміру нахилу й натягу каната шляхом корегування результатів вимірів з урахуванням поточного значення температури для кожного виміру в реальному часі. В інституті виготовлено дослідний зразок пристрою для виміру натягу та нахилу каната, що пройшов випробування на шахті. Джерела інформації: 2 1. А.с. СССР № 645042, МПК G01L 5/04, Устройство для измерения натяжения каната, Заявка: 4876318/10 от 22.10.90, Опубликовано 15.12.92, Бюл. № 46. 2. RU № 2007102553, МПК В66С 13/00, Устройство для измерения угла наклона каната грузоподъемной машины (варианты), Заявка: 2007102553/11 от 23.01.2007, Опубликовано 27.07.2008, Бюл. № 21. 15 ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 45 50 Пристрій для виміру нахилу та натягу каната, що містить датчик натягу каната, перший корпус, прикріплений до головного каната над причіпним пристроєм піднімальної посудини, усередині якого встановлені джерело живлення, мікроконтролер, триосьовий акселерометр, три інформаційних виходи якого з'єднані відповідно з першим, другим і третім інформаційними входами мікроконтролера, два світлодіоди, анод першого з'єднаний з першим цифровим виходом мікроконтролера, анод другого - із другим цифровим виходом, катоди - з мінусом джерела живлення, а плюс джерела живлення з'єднаний із шиною живлення, приймачпередавач, вхід і вихід послідовного інтерфейсу якого з'єднаний з відповідним виходом і входом мікроконтролера відповідно до винаходу, який відрізняється тим, що в нього додатково введений триосьовий гіроскоп, три інформаційних виходи якого з'єднані із четвертими, п'ятим і шостим інформаційними входами мікроконтролера, датчик температури, інформаційний вихід якого з'єднаний із сьомим інформаційним входом мікроконтролера, вимикач кнопковий, один кінець якого з'єднаний з мінусом джерела живлення, а другий - з першим цифровим входом мікроконтролера, два джерела опорної напруги, перший і другий підсилювач, виходи яких з'єднані відповідно з восьмим і дев'ятим інформаційними входами мікроконтролера, третій і четвертий цифрові виходи якого відповідно через перше і друге джерело опорної напруги з'єднані із входами керування першого та другого підсилювача, вхід підстроювання коефіцієнта підсилення першого підсилювача з'єднаний з п'ятим цифровим виходом мікроконтролера, а вхід підстроювання коефіцієнта підсилення другого підсилювача - із шостим цифровим виходом мікроконтролера, сьомий, восьмий та дев'ятий цифрові виходи останнього з'єднані відповідно із входами керування триосьового гіроскопа, а десятий, одинадцятий і дванадцятий цифрові виходи відповідно з'єднані із входами керування триосьового акселерометра, перший і другий аналогові виходи мікроконтролера є аналоговими виходами відповідно натягу та нахилу каната, а датчик натягу складається із двох магніточутливих мікросхем і магніту, розташованого усередині першого корпуса, причому перша магніточутлива мікросхема розташована в другому корпусі й прикріплена до головного каната вище першого корпуса, а друга магніточутлива мікросхема розташована в третьому корпусі й прикріплена до головного каната нижче першого корпуса, перший вхід першої магніточутливої мікросхеми є першим входом датчика натягу каната та з'єднаний із тринадцятим цифровим виходом мікроконтролера, а другий вхід - є другим входом датчика натягу каната й з'єднаний із чотирнадцятим цифровим виходом мікроконтролера, перший і другий виходи датчика натягу каната є відповідно виходами першої й другої магніточутливої мікросхем і з'єднані відповідно з вимірювальними входами першого й другого підсилювача. 3 UA 97929 C2 4 UA 97929 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring rope tension and slope
Автори англійськоюChekhlatyi Mykola Oleksandrovych, Hrytsaienko Anton Yuriiovych, Yevsiukov Serhii Oleksandrovych, Demchenko Mykola Petrovych, Hodar Oleksandr Andriiovych
Назва патенту російськоюУстройство для измерения натяжения и наклона каната
Автори російськоюЧехлатый Николай Александрович, Грицаенко Антон Юрьевич, Евсюков Сергей Александрович, Демченко Николай Петрович, Годар Александр Андреевич
МПК / Мітки
МПК: G01C 9/02, B66C 13/04
Мітки: натягу, каната, пристрій, виміру, нахилу
Код посилання
<a href="https://ua.patents.su/7-97929-pristrijj-dlya-vimiru-natyagu-ta-nakhilu-kanata.html" target="_blank" rel="follow" title="База патентів України">Пристрій для виміру натягу та нахилу каната</a>
Пристрій для контролю натягу каната
Номер патенту: 22452
Опубліковано: 25.04.2007
Автори: Бабков Світозар Всеволодович, Левицький Олександр Сергійович, Левицький Денис Олександрович, Бережинський Володимир Ізраїлевич
МПК: B66C 5/00
Мітки: пристрій, контролю, натягу, каната
Формула / Реферат:
Пристрій для контролю натягу каната, що містить вимірник натягу каната, який відрізняється тим, що він обладнаний датчиком для вимірювання довжини каната, що знаходиться в стволі, а вимірник натягу каната містить відхильний шків і трансформатор тиску з манометричним датчиком.
Пристрій для натягу каната на барабані лебідки

Номер патенту: 33034
Опубліковано: 10.06.2008
Автори: Коптовець Олександр Миколайович, Зіль Валерій Васильович, Денищенко Олександр Валерійович
МПК: B66D 1/00
Мітки: лебідки, барабані, каната, пристрій, натягу
Формула / Реферат:
Пристрій для натягу каната на барабані лебідки, що містить несучу раму, який відрізняється тим, що в нього введено два блоки з нерухомими осями, що закріплені на рамі, рухомий середній блок, встановлений між ними з можливістю переміщення у вертикальній площині, та гвинтову пару з пружним елементом, вільно зв'язаним із середнім блоком та рамою, при цьому тяговий канат огинає усі три блоки.
Пристрій для натягу каната на барабані лебідки

Номер патенту: 90522
Опубліковано: 11.05.2010
Автори: Зіль Валерій Васильович, Денищенко Олександр Валерійович
МПК: B66D 1/28
Мітки: каната, натягу, пристрій, лебідки, барабані
Формула / Реферат:
Пристрій для натягу каната на барабані лебідки, що містить несучу раму, який відрізняється тим, що в ньому введено два блоки з нерухомими осями, що закріплені на рамі, рухомий середній блок, встановлений між ними з можливістю переміщення у вертикальній площині, та гвинтову пару з пружним елементом, вільно зв'язаним із середнім блоком та рамою, при цьому тяговий канат огинає усі три блоки.
Універсальний пристрій для одночасного вирівнювання натягу і деформації пасом при скручуванні каната
Номер патенту: 15916
Опубліковано: 30.06.1997
Автори: Сєдаков Дмитрій Вікторович, Чаюн Івап Михайлович, Сєргєєв Святослав Тимофійович
МПК: D07B 7/00
Мітки: деформації, натягу, пристрій, вирівнювання, універсальний, скручуванні, одночасного, каната, пасом
Формула / Реферат:
Универсальное устройство для одновременного выравнивания натяжения и деформации прядей при свивке каната, содержащее полый вал с установленными на нем тремя дисками, на которых радиально расположены ролики с возможностью вращения, причем средний диск смещен по радиусу относительно двух крайних, отличающееся тем, что дополнительно содержит установленные на первом диске прижимные ролики, кронштейны с осями, рычаги и пружины, причем под углом...
Пристрій для виміру ступеня натягу тканини
Номер патенту: 34281
Опубліковано: 11.08.2008
Автор: Брежнєв Володимир Петрович
МПК: G01B 1/00
Мітки: пристрій, натягу, ступеня, тканини, виміру
Формула / Реферат:
Пристрій для виміру натягу тканин, котрий містить дві бранші з голками, який відрізняється тим, що з метою підвищення точності виміру навантаження на шви при зближенні країв рани, на одній із бранш розташована тарована пружина з нажимним корпусом.
Попередній патент: Опорна балка візка для кільцевого охолоджувача
Наступний патент: Механізм трансмісії з безперервною плавною зміною передачі
Випадковий патент: Ортез на гомілку