Спосіб визначення зон можливого обледеніння літаків і гелікоптерів
Номер патенту: 98228
Опубліковано: 27.04.2015
Автори: Пітерцев Олександр Андрійович, Яновький Фелікс Йосипович

Формула / Реферат
Спосіб визначення зон можливого обледеніння літаків і гелікоптерів, що полягає в тому, що формується голчаста діаграма спрямованості антени, випромінюються імпульси електромагнітних коливань, приймаються відбиті сигнали, здійснюється їх детектування, посилення і відображення на екрані спеціального пристрою відображення інформації або передача для обробки на пристрій більш високого рівня, який відрізняється тим, що, під час випромінювання імпульсів електромагнітних коливань і прийому відбитих сигналів від гідрометеорологічних утворень, додатково по черзі випромінюють горизонтально (X) поляризовані й вертикально (Y) поляризовані зондувальні імпульси, приймають горизонтально (X) поляризовану й вертикально (Y) поляризовану компоненти відбитого сигналу по кожному випроміненому імпульсу, вимірюють потужності основних (Ρxx і Руу) і ортогональних (Рху і Рух) компонент відбитого сигналу, вимірюють температуру гідрометеорологічного утворення, від якого відбиваються зондувальні імпульси, порівнюють між собою величини потужностей основних компонент відбитого сигналу Ρxx і Руу, величини ортогональних компонент Рxy і Рух відбитого сигналу, і за результатами цього порівняння і виміряного показника середньої температури метеорологічного утворення приймається рішення щодо наявності або відсутності ЗМО в обсязі простору, який задається напрямком випромінювання, часом запізнювання відбитих сигналів відносно випромінених імпульсів і тривалістю зондувальних імпульсів, причому, якщо температура менше або дорівнює температурі замерзання води і одночасно виконуються умови:
Ρxx = Ρyy,
Рxy = Рух = 0,
де Ρxx - потужність прийнятої горизонтально поляризованої компоненти відбитого сигналу при випромінюванні горизонтально поляризованих імпульсів, у децибелах; Руу - потужність прийнятої вертикально поляризованої компоненти відбитого сигналу при випромінюванні вертикально поляризованих імпульсів, у децибелах; Рху - потужність прийнятої вертикально поляризованої компоненти відбитого сигналу при випромінюванні горизонтально поляризованих імпульсів, у децибелах; Рух - потужність прийнятої горизонтально поляризованої компоненти при випромінюванні вертикально поляризованих імпульсів, у децибелах, то ухвалюють рішення щодо наявності ЗМО, а в протилежному випадку - про відсутність ЗМО, температуру гідрометеорологічних утворень оцінюють шляхом вимірювання параметру радіояскравісної температури метеорологічного об'єкту.
Текст
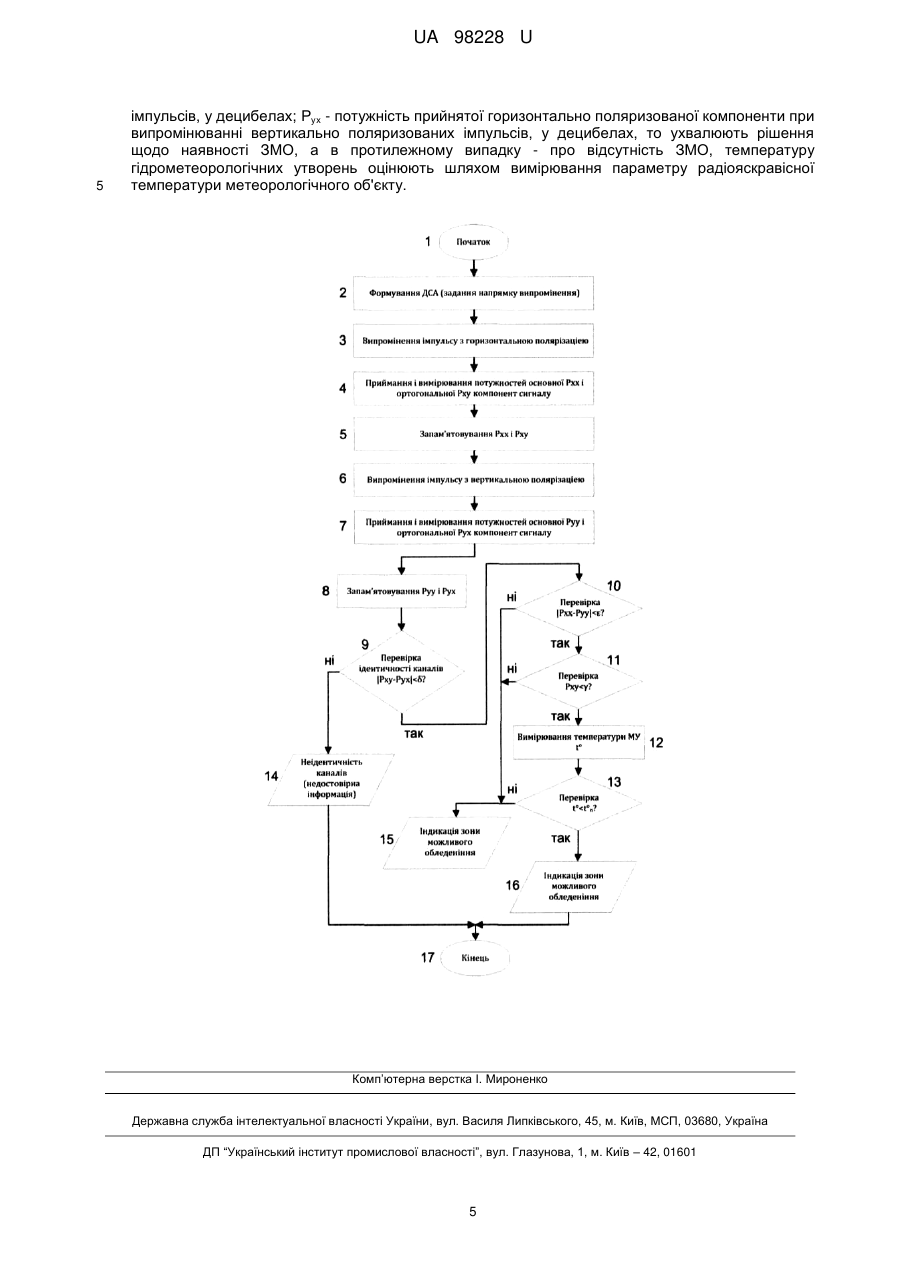
Реферат: UA 98228 U UA 98228 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до радіотехнічної галузі, а саме до метеорологічної радіолокації, і може бути використана для дистанційного безконтактного визначення зон можливого обледеніння літальних апаратів за допомогою бортового метеорологічного радіолокатора. Відомий спосіб попередження екіпажу повітряного судна (ПС) про загрозу обледеніння ПС за допомогою радіоізотопних сигналізаторів обледеніння, наприклад, РІО-3, датчики яких встановлюють у повітрозбірниках двигунів АІ-25 [1]. У датчиках можуть використовуватись також інші фізичні принципи детектування наявності шару льоду на поверхні ПС. Зокрема відомі тепломірні, вібраційні, оптичні, акустичні та конденсаторні сигналізатори обледеніння. Однак відомому способу властиві недоліки, що полягають у низькій надійності і несвоєчасності подачі сигналів про загрозу обледеніння для інформування екіпажа і вмикання протиобліднювальної системи і виникаючі у зв'язку з тим, що відомий спосіб принципово працездатний тільки тоді, коли ПС вже потрапило у зону можливого обледеніння (ЗМО) і процес обледеніння почався. Через зазначені недоліки автоматичний режим роботи протиобліднювальної системи на практиці часто не використовують, а вмикання протиобліднювальної системи в режим обігріву виконують в умовах можливого обледеніння, яке прогнозується за повідомленнями рейсових екіпажів і прогнозам синоптиків [1]. Найбільш близьким до пропонованого за своєю технічною суттю є спосіб виявлення зон можливого обледеніння повітряних суден за допомогою бортових метеонавігаційних радіолокаторів, що працюють у режимі виявлення гідрометеоутворень, який полягає у формуванні голчастої діаграми спрямованості антени, випромінюванні імпульсів електромагнітних коливань (звичайно з вертикальною поляризацією), прийому відбитих сигналів (тієї ж поляризації), детектуванні обвідної сигналів, посиленні їх і яскравішим відображенні на екрані пристрою відображення метеонавігаційного радіолокатора з радіально-секторною (радіально-коловою) системою координат. При скануванні антеною відбитий від гідрометеоутворення сигнал створює на екрані характерні засвічування, що вирізняються оператором або пілотом. Оскільки ЗМО пов'язані з наявністю хмарності, то місце розташування можливих зон обледеніння ототожнюють із місцем розташування хмар, що виявляються у відомому способі [2]. Однак і цей спосіб виявлення ЗМО має недолік, що полягає в тому, що практично всі хмари, що виявляються у відомому способі, можна вважати ЗМО, у той час як відомо, що обледеніння ПС відбувається тільки при наявності переохолоджених водяних крапель [3]. Зазначений недолік приводить до невиправдано високого рівня фіктивних тривог при локалізації ЗМО відомим способом, що знижує регулярність польотів і тягне погіршення економічних показників повітряного транспорту. В основу корисної моделі поставлена задача підвищення достовірності виявлення ЗМО радіолокаційними засобами. Для цього потрібно забезпечити можливість відрізняти зони, що мають небезпеку для повітряних суден з точки зору можливості обледеніння, а саме: - містять дрібні водяні краплі у достатній кількості; - мають температуру повітря нижче 0 °C, від інших гідрометеорологічних утворень, які не мають ознак зони можливого обледеніння повітряного судна, таких, наприклад, як дощова хмара, або хмара, що складається з кристалів льоду та снігу. Поставлена задача вирішується тим, що формується голчаста діаграма спрямованості антени, випромінюються імпульси електромагнітних коливань, приймаються відбиті сигнали, здійснюється їх детектування, посилення і відображення на екрані спеціального пристрою відображення інформації або передача для обробки на пристрій більш високого рівня. При скануванні антеною відбитий від гідрометеоутворення сигнал створює на екрані характерні засвічування або виділяються кольором, що вирізняються оператором або пілотом. Але, згідно з корисною моделлю, під час випромінювання імпульсів електромагнітних коливань і прийому відбитих сигналів від гідрометеорологічних утворень, додатково по черзі випромінюють горизонтально (X) поляризовані й вертикально (Y) поляризовані зондувальні імпульси, приймають горизонтально (X) поляризовану й вертикально (Y) поляризовану компоненти відбитого сигналу по кожному випроміненому імпульсу, вимірюють потужності основних (Ρхх і Руу) і ортогональних (Рxу і Рух) компонент відбитого сигналу, вимірюють температуру гідрометеорологічного утворення, від якого відбиваються зондувальні імпульси, порівнюють між собою величини потужностей основних компонент відбитого сигналу Ρxx і Рyy, величини ортогональних компонент Рху і Рух відбитого сигналу, і за результатами цього порівняння і виміряного показника середньої температури метеорологічного утворення приймається рішення щодо наявності або відсутності ЗМО в обсязі простору, який задається напрямком випромінювання, часом запізнювання відбитих сигналів відносно випромінених імпульсів і 1 UA 98228 U 5 10 15 20 25 30 35 40 45 50 55 60 тривалістю зондувальних імпульсів. Причому, якщо температура менше або дорівнює температурі замерзання води і одночасно виконуються умови: Ρxx = Рyy Рxу = Рух =0, де Ρxx - потужність прийнятої горизонтально поляризованої компоненти відбитого сигналу при випромінюванні горизонтально поляризованих імпульсів, у децибелах; Руу - потужність прийнятої вертикально поляризованої компоненти відбитого сигналу при випромінюванні вертикально поляризованих імпульсів, у децибелах; Рxy - потужність прийнятої вертикально поляризованої компоненти відбитого сигналу при випромінюванні горизонтально поляризованих імпульсів, у децибелах; Рух - потужність прийнятої горизонтально поляризованої компоненти при випромінюванні вертикально поляризованих імпульсів, у децибелах, то ухвалюють рішення щодо наявності ЗМО, а в протилежному випадку - про відсутність ЗМО. Відмінністю способу є також метод визначення температури гідрометеорологічного утворення. Температуру гідрометеорологічних утворень оцінюють шляхом вимірювання параметру радіояскравісної температури метеорологічного об'єкту. Термін "радіояскравісна температура" використано для позначення температури метеорологічного утворення, яку визначено шляхом пасивних радіометричних вимірювань власного випромінювання об'єкту у мікрохвильовому діапазоні частот (оскільки відомо, що будьякий об'єкт із температурою вище абсолютного нуля має власне випромінення у певному спектрі частот). Суть запропонованого способу полягає в тому, що (див. рисунок) формують голчасту діаграму спрямованості антени (блок 2), за допомогою якої забезпечується опромінення метеорологічних об'єктів у заданому напрямку; випромінюють (блок 3) імпульс електромагнітних коливань заданої поляризації, наприклад, горизонтальної - X (тривалість імпульсу обирається, виходячи з необхідної роздільної здатності по дальності); приймають відбитий від метеорологічного об'єкта сигнал (хоча відбиті сигнали приймають від усіх об'ємів, що знаходяться у зоні огляду і мають підбивальні властивості у даному напрямку, з метою полегшення розуміння, розглянемо суть способу на прикладі опромінення тільки одного відбиваючого об'єму, що не знижує спільності розгляду). Поляризація прийнятого сигналу може відрізнятись від поляризації випроміненого сигналу, що викликано властивостями об'єкта, що відбиває сигнал (форма, орієнтація гідрометеорів і т.п.). Тому прийнятий сигнал містить як основну, так і ортогональну компоненти. Прийнятий сигнал розщеплюють на дві ортогонально поляризовані складові (в іншому варіанті способу може бути здійснено двоканальний прийом). Оскільки розгляд початий з випромінювання горизонтально (X) поляризованого сигналу, то в результаті розщеплення отримаємо основну (у цьому випадку горизонтально поляризовану X) і ортогональну (у цьому випадку вертикально поляризовану У) компоненти. Далі вимірюють потужність кожної із двох отриманих ортогональних компонент відбитого сигналу Ρxx і Ρyy. Потім те ж саме проводять при вертикальній поляризації зондувального імпульсу (блоки 4-8). Необхідно відзначити, що порядок вимірювання величин Ρxx, Рху, Рух, Руу для сутності способу значення не має. Якщо вимірювання проводяться послідовно (тобто після розщеплення сигнал проходить через одноканальний приймач), то доцільно спочатку вимірювати основні компоненти, а потім ортогональні, наприклад Ρxx, Руу, Рух, Рху і т.д. (доцільно Ρxx і Руу вимірювати підряд, щоб параметри гідрометеорів практично не встигли змінитись). Якщо ж вимірювання проводяться паралельно (тобто після розщеплення кожна компонента сигналу надходить у свій канал), то вимірюють паралельно обидві компоненти: Ρxx, Рху, потім Руу, Рух. Можливо також розділення прийомних каналів, починаючи з антени. Необхідно також відзначити, що основна корисна інформація міститься не в абсолютних величинах сигналів, а у величині різниці між ними. Тому метрологічні проблеми тут не виникають, необхідно лишезабезпечити звичайні вимоги по стабільності характеристик апаратури. Процес вимірювання може бути зведений до запам'ятовування амплітуди сигналу на виході приймача (наприклад, у цифровій формі), яка монотонно пов'язана з потужністю вхідного сигналу радіолокатора. Далі визначають модуль різниці Pxy - Рух і випробовують його на поріг δ (блок 9). Зміст цієї процедури полягає в тому, щоб проконтролювати ідентичність каналів виміру основної і ортогональної складових. Згідно з теорією, величини Рxy і Рух повинні бути рівні між собою. Тому якщо Pxy - Рух δ, то це свідчить про недостатню ідентичність каналів вимірювання. У цьому випадку різниця значень Ρxx і Руу також може бути викликана особливостями апаратури, а не метеорологічного об'єкта, а отже, достовірність локалізації ЗМО буде нижче необхідної (блок 14). Якщо виконана умова Pxy - Рух
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 13/95
Мітки: гелікоптерів, спосіб, зон, можливого, обледеніння, літаків, визначення
Код посилання
<a href="https://ua.patents.su/7-98228-sposib-viznachennya-zon-mozhlivogo-obledeninnya-litakiv-i-gelikopteriv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення зон можливого обледеніння літаків і гелікоптерів</a>
Рлс виявлення гвинтових літаків та гелікоптерів
Номер патенту: 24427
Опубліковано: 17.07.1998
Автори: Феньов Дмитро Васильйович, Рогов Петро Дмитрович, Касаткін Леонід Веніамінович
МПК: G01S 13/00
Мітки: рлс, гелікоптерів, літаків, виявлення, гвинтових
Формула / Реферат:
РЛС обнаружения винтовых самолетов и вертолетов, содержащая импульсный передатчик СВЧ, включающий импульсный модулятор и генератор зондирующих когерентных СВЧ радиоимпульсов, приемное устройство, включающее смеситель, усилитель отраженных сигналов с полосой пропускания, равной интервалу доплеровских частот, соответствующих интервалу измеряемых скоростей цепи, гребенчатый фильтр для определения скорости цели и индикаторы дальности и скорости...
Пристрій для захисту оптичної системи від обледеніння і роси
Номер патенту: 86400
Опубліковано: 25.12.2013
Автори: Стоділка Мирон Іванович, Вовчик Єва Богданівна, Дейнека Ростислав Михайлович, Білінський Андрій Іванович, Благодир Ярослав Тимофійович, Мартинюк-Лотоцький Костянтин Павлович, Янків-Вітковська Любов Миколаївна
МПК: G02B 23/16
Мітки: обледеніння, пристрій, системі, захисту, оптично, роси
Формула / Реферат:
Пристрій для захисту оптичної системи від обледеніння і роси, що містить дзеркало в оправі, встановлене на гідувальному монтуванні телескопа, який відрізняється тим, що додатково містить нагрівні елементи та вентилятори, встановлені попарно і симетрично на оправі дзеркала.
Пристрій для усунення обледеніння в тунелі
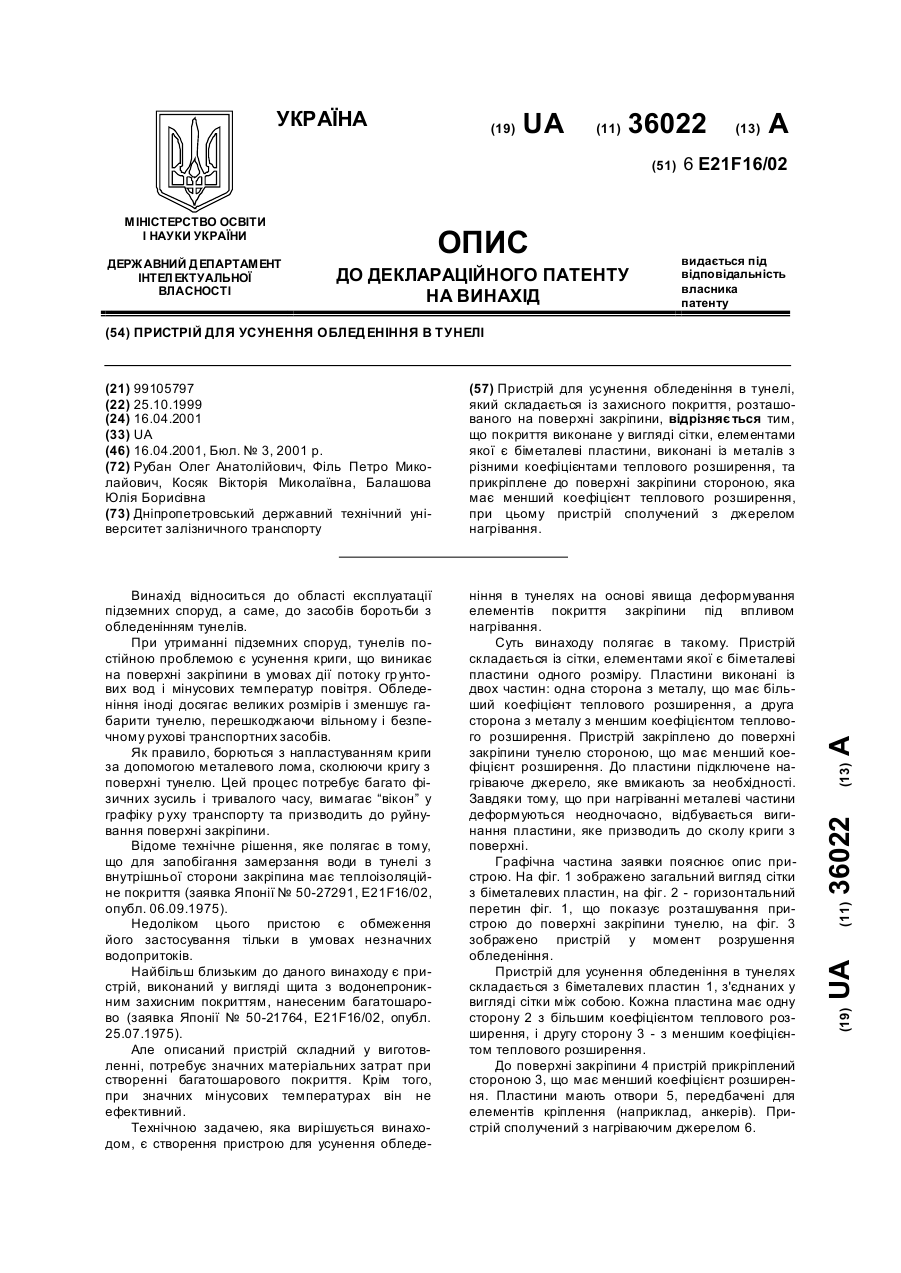
Номер патенту: 36022
Опубліковано: 16.04.2001
Автори: Рубан Олег Анатолійович, Косяк Вікторія Миколаївна, Балашова Юлія Борисівна, Філь Петро Миколайович
МПК: E21F 16/00
Мітки: усунення, пристрій, обледеніння, тунелі
Текст:
...транспорту 36022 Пристрій працює за такою послідовністю. За необхідності усунення обледеніння включають джерело нагрівання 6. Частини 2 пластини 1 нагріваються швидше, ніж частини 3, внаслідок чого відбувається вигинання пластини 1 в сторону криги. Обледеніння руйнується i відпадає від поверх ні. При виключені джерела 6 пластини 1 охолоджуються та приймають початковий вигляд. Запропонований пристрій раціонально встановлювати на тих...
Спосіб прогнозування обледеніння дротів повітряних ліній електропередач
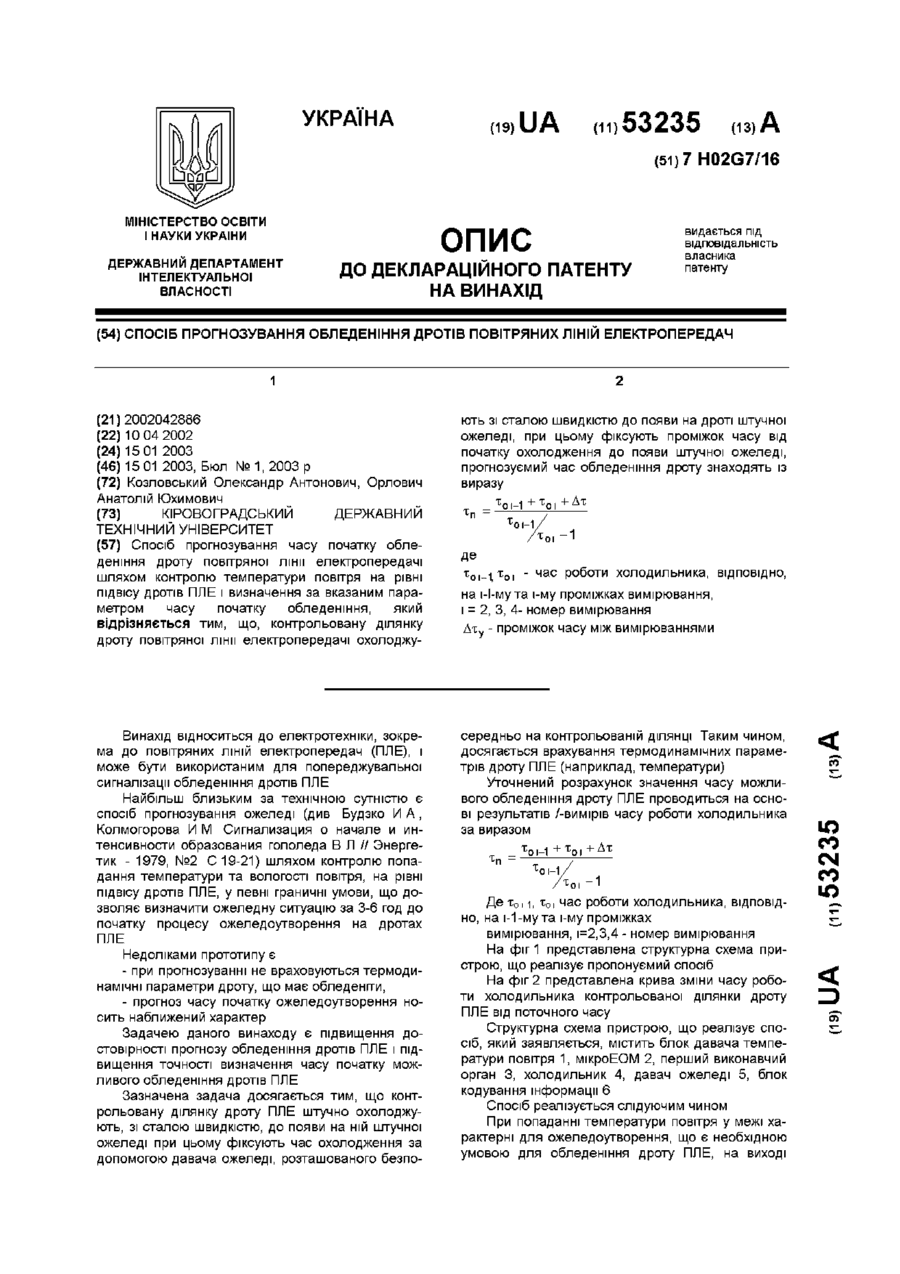
Номер патенту: 53235
Опубліковано: 15.01.2003
Автори: Орлович Анатолій Юхимович, Козловський Олександр Антонович
МПК: H02G 7/16
Мітки: ліній, обледеніння, спосіб, електропередач, прогнозування, дротів, повітряних
Формула / Реферат:
Спосіб прогнозування часу початку обледеніння дроту повітряної лінії електропередачі (ПЛЕ) шляхом контролю температури повітря на рівні підвісу дротів ПЛЕ і визначення за вказаним параметром часу початку обледеніння, який відрізняється тим, що контрольовану ділянку дроту повітряної лінії електропередачі охолоджують зі сталою швидкістю до появи на дроті штучної ожеледі, при цьому фіксують проміжок часу від початку охолодження до появи штучної...
Сигналізатор обледеніння проводів повітряних ліній електропередачі
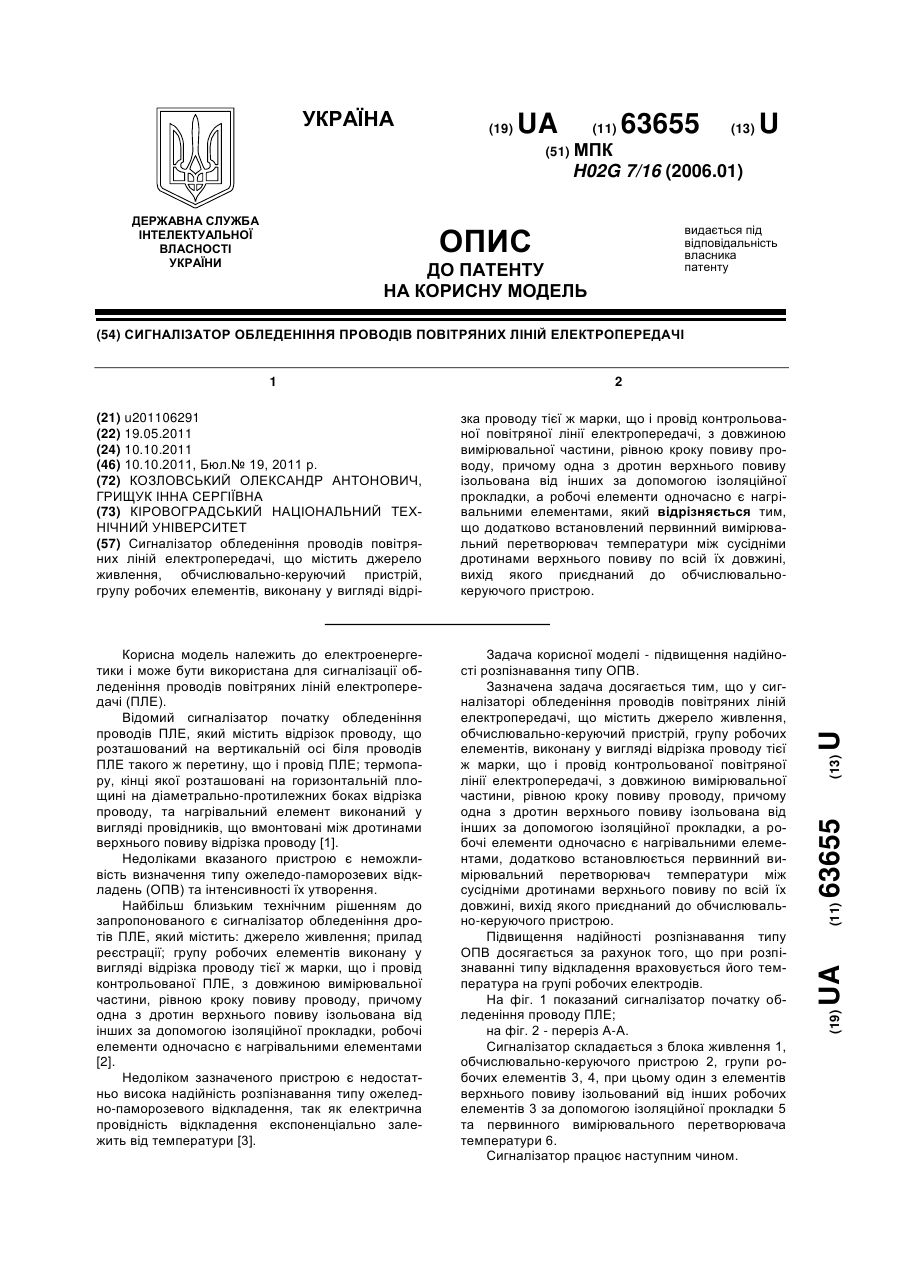
Номер патенту: 63655
Опубліковано: 10.10.2011
Автори: Грищук Інна Сергіївна, Козловський Олександр Антонович
МПК: H02G 7/16
Мітки: проводів, обледеніння, повітряних, ліній, сигналізатор, електропередачі
Формула / Реферат:
Сигналізатор обледеніння проводів повітряних ліній електропередачі, що містить джерело живлення, обчислювально-керуючий пристрій, групу робочих елементів, виконану у вигляді відрізка проводу тієї ж марки, що і провід контрольованої повітряної лінії електропередачі, з довжиною вимірювальної частини, рівною кроку повиву проводу, причому одна з дротин верхнього повиву ізольована від інших за допомогою ізоляційної прокладки, а робочі елементи...
Попередній патент: Градієнтне покриття з високою припрацьовуваністю і зносостійкістю
Наступний патент: Цифровий вимірювач різниці фаз
Випадковий патент: Поліно тривалого горіння