Пристрій для визначення параметрів посадки та деформації корпуса плавзасобу
Номер патенту: 99147
Опубліковано: 25.05.2015
Автори: Гудима Євген Анатолійович, Гордєєв Борис Миколайович, Зівенко Олексій Васильович, Жуков Юрій Даниїлович, Моторкін Дмитро Юрійович, Пан Олександр Анатолійович

Формула / Реферат
Пристрій для визначення осадки, крену та диференту плавзасобу, що містить датчики рівня, електрично з'єднані через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, який відрізняється тим, що збільшено загальну кількість датчиків як мінімум до 4, окремі датчики можуть бути згруповані та розміщені у носовій, кормовій частині плавзасобу, що дозволяє отримувати значення кутів крену та диференту або окремо для груп датчиків, або усереднені для всього плавзасобу, параметри посадки та параметри деформації корпусу судна, а також за рахунок збільшення кількості датчиків та використання алгоритму визначення кутів крену та диференту за даними 3-х датчиків підвищити загальну надійність роботи пристрою.
Текст
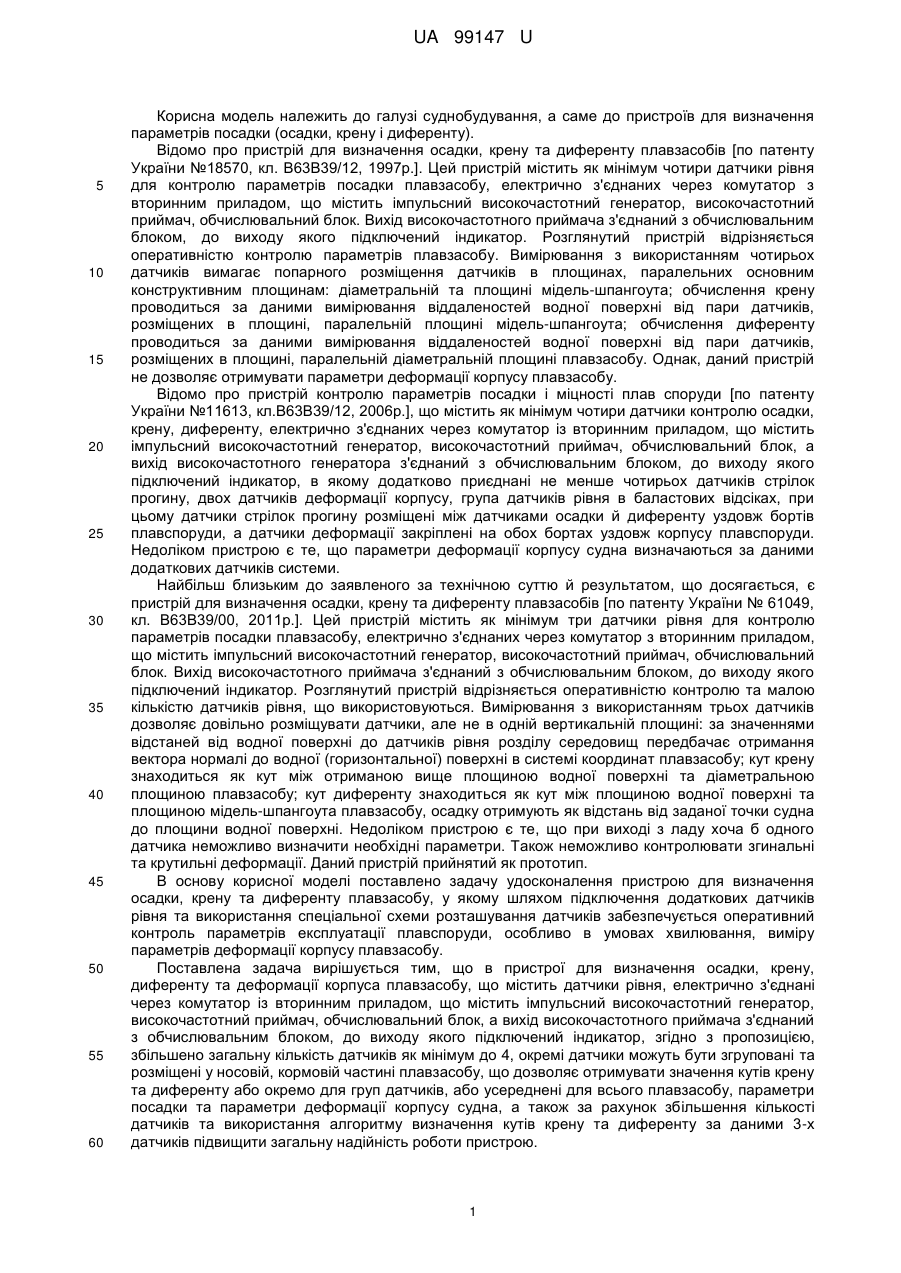
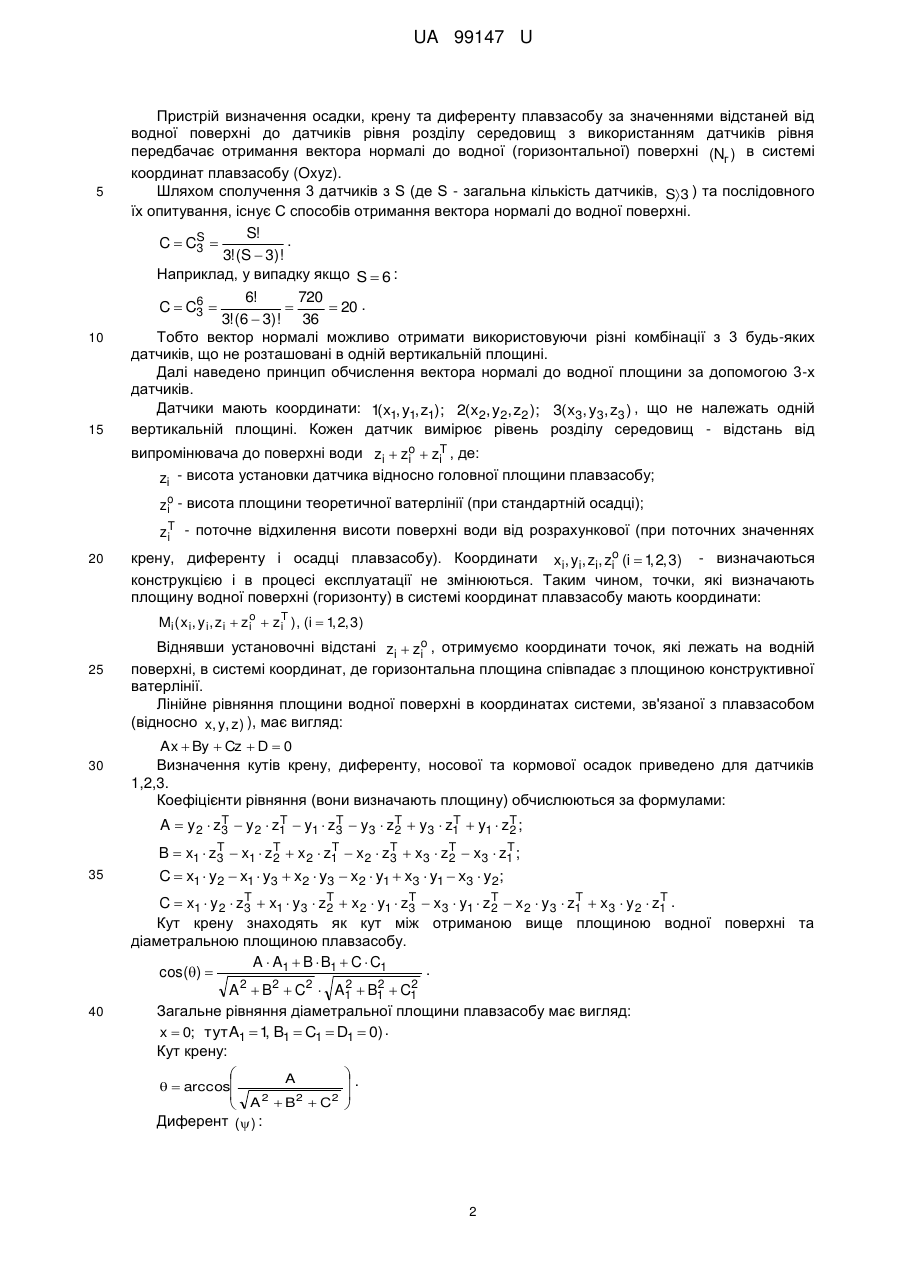
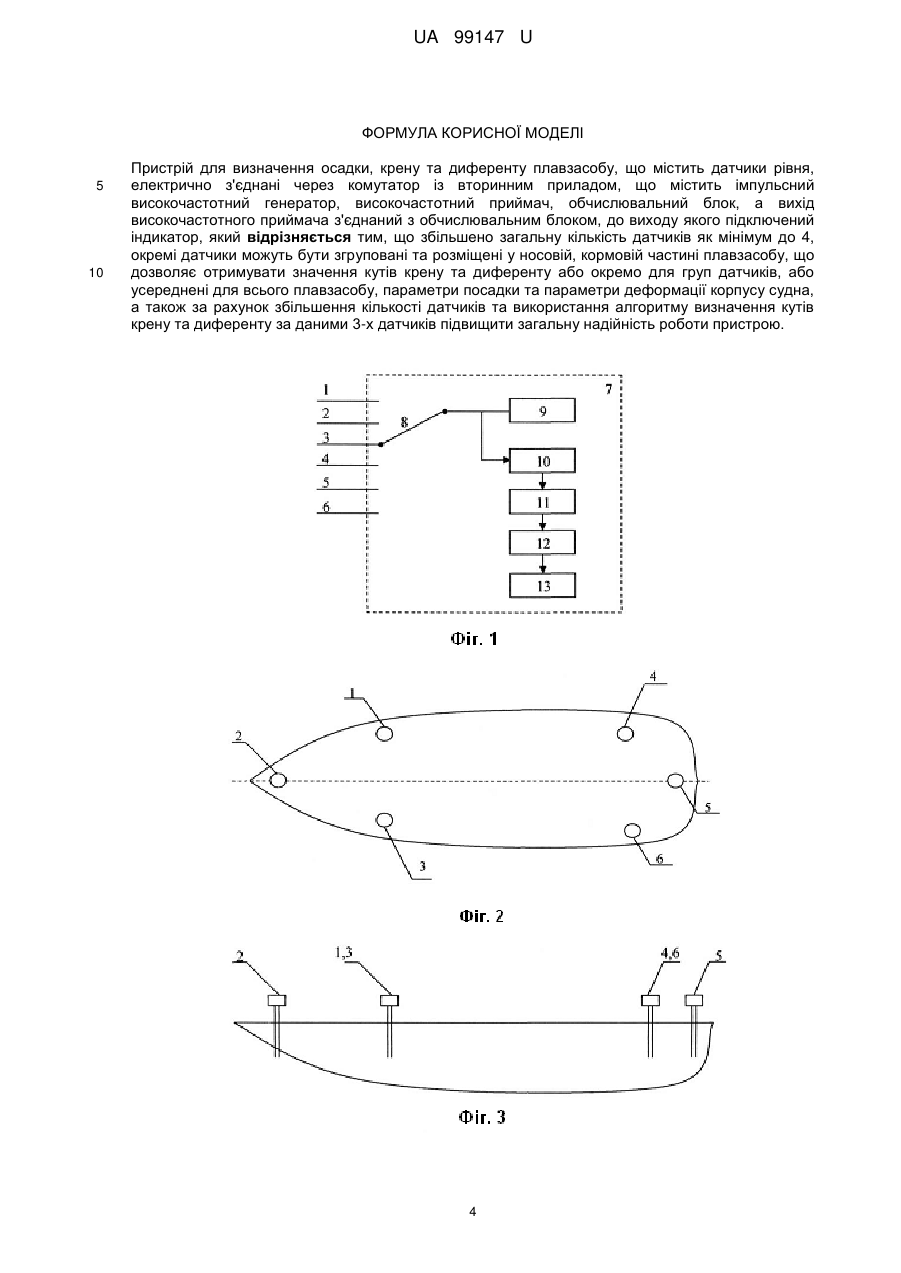
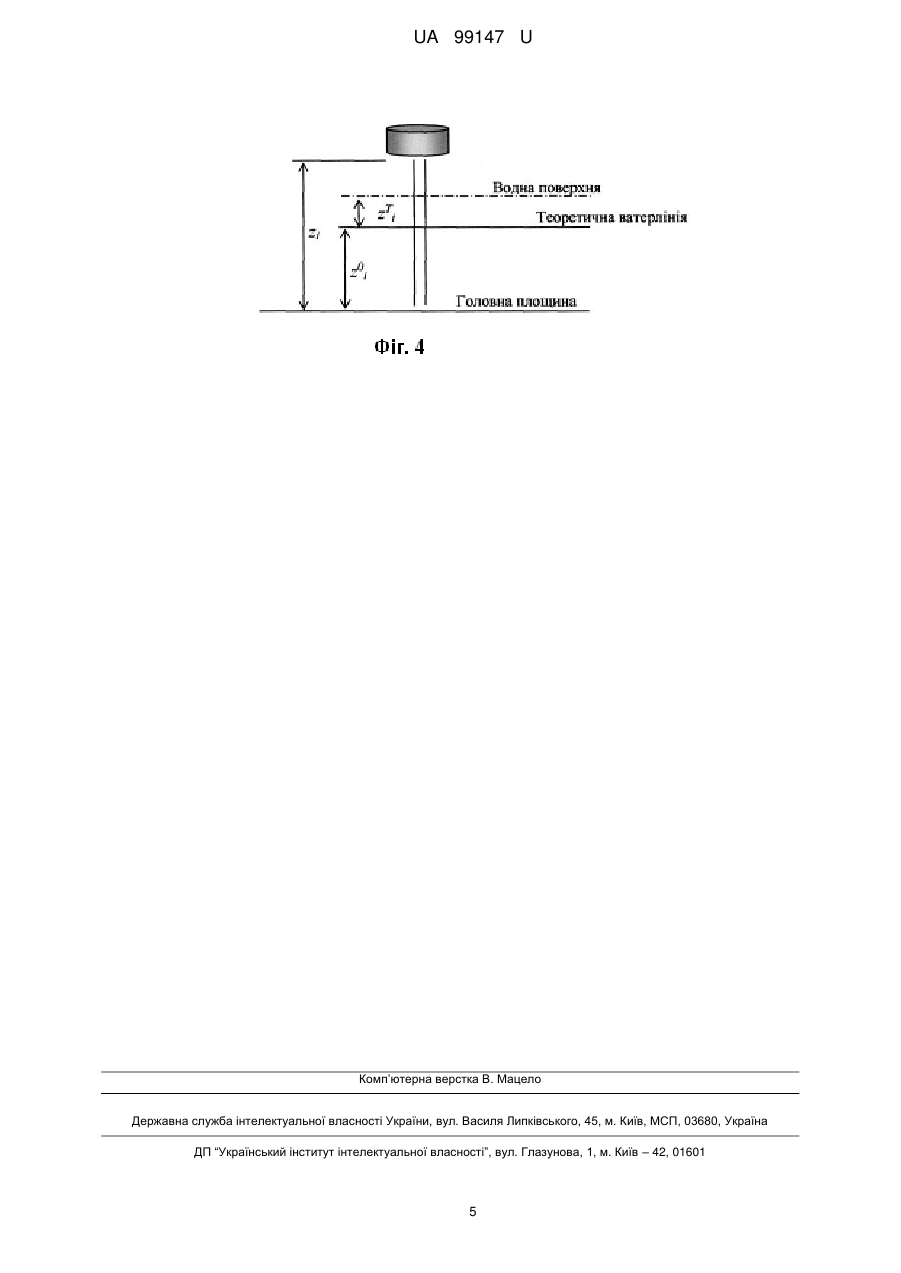
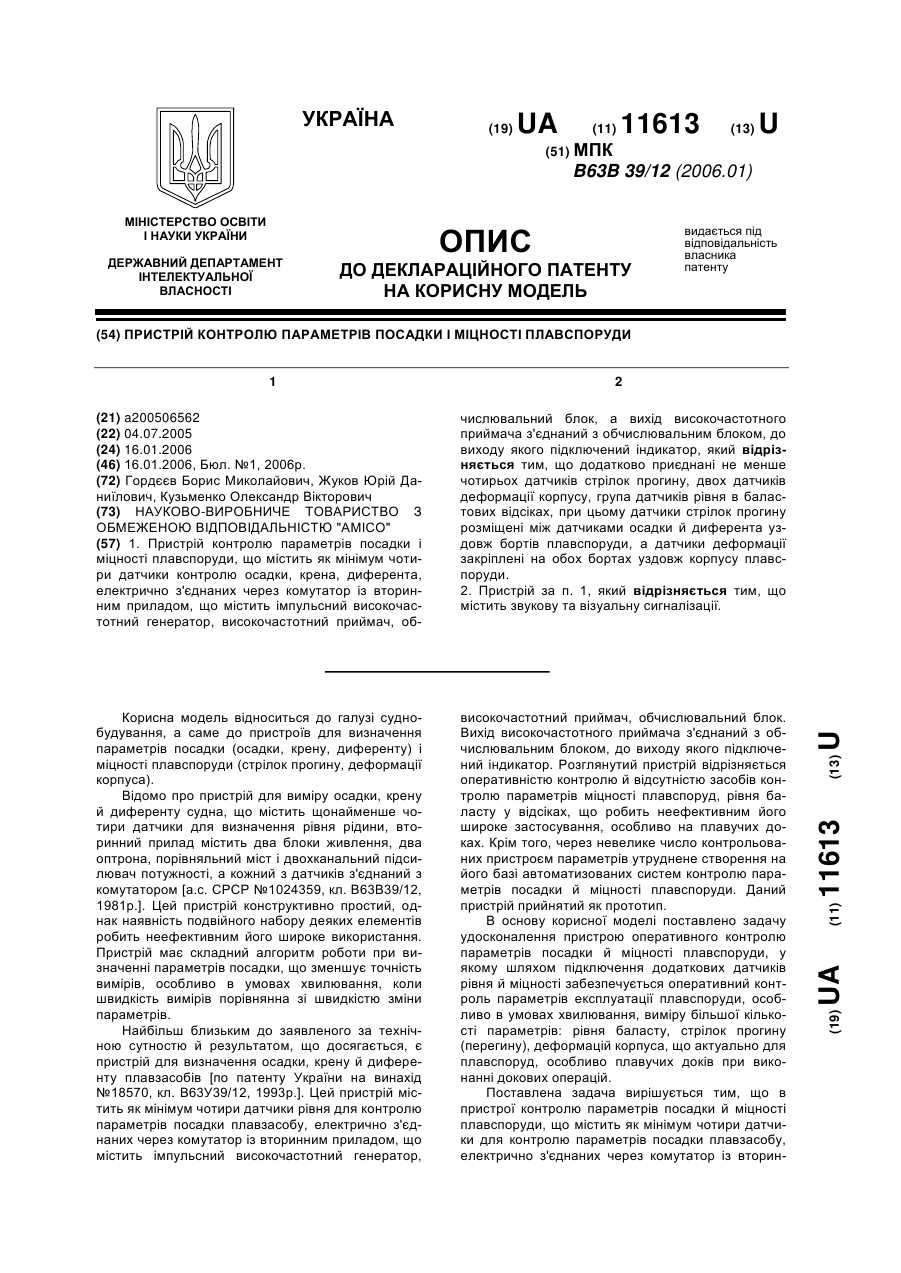
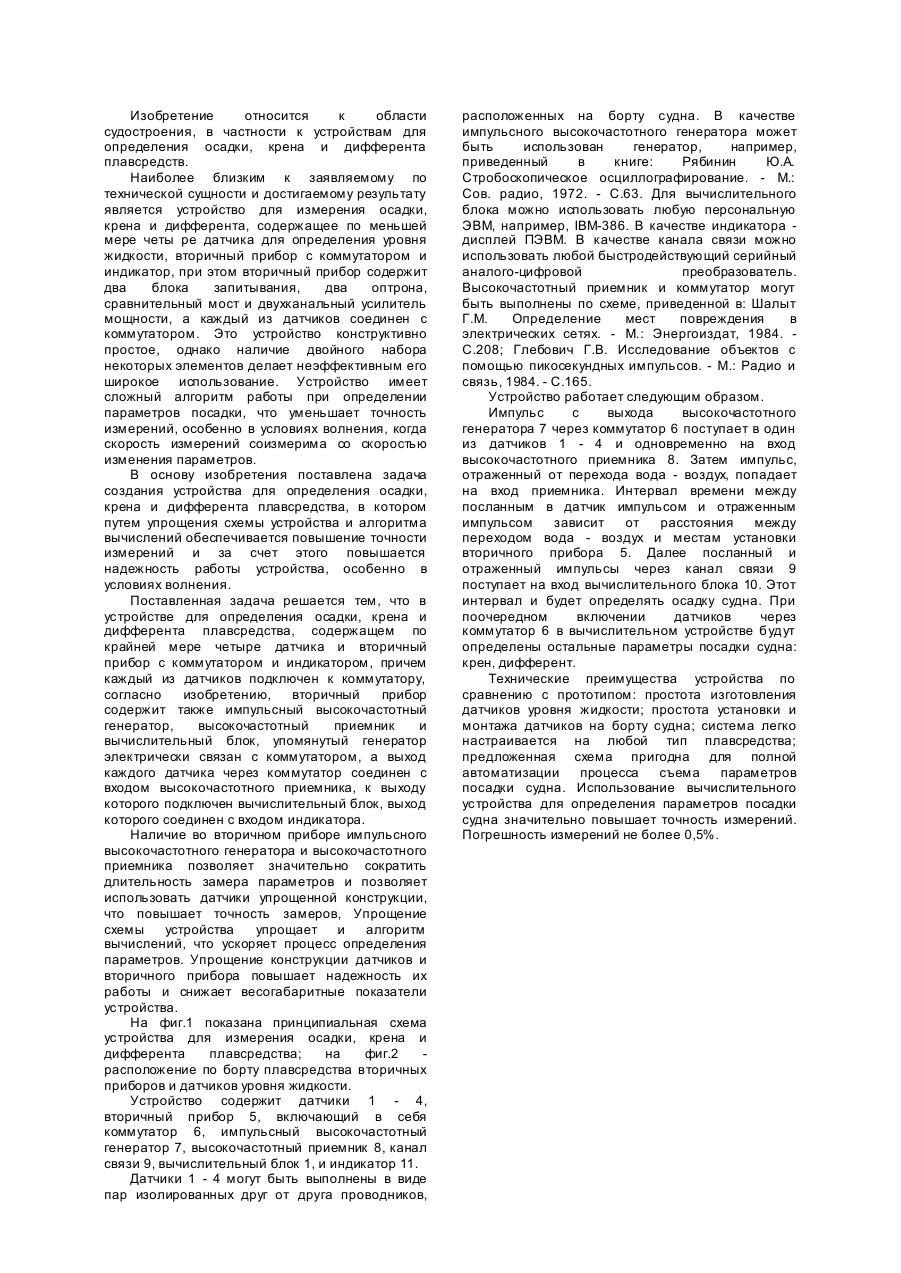
Реферат: Пристрій для визначення осадки, крену та диференту плавзасобу, що містить датчики рівня, електрично з'єднані через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор. Збільшено загальну кількість датчиків як мінімум до 4, окремі датчики можуть бути згруповані та розміщені у носовій, кормовій частині плавзасобу, що дозволяє отримувати значення кутів крену та диференту або окремо для груп датчиків, або усереднені для всього плавзасобу, параметри посадки та параметри деформації корпусу судна, а також за рахунок збільшення кількості датчиків та використання алгоритму визначення кутів крену та диференту за даними 3-х датчиків підвищити загальну надійність роботи пристрою. UA 99147 U (12) UA 99147 U UA 99147 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі суднобудування, а саме до пристроїв для визначення параметрів посадки (осадки, крену і диференту). Відомо про пристрій для визначення осадки, крену та диференту плавзасобів [по патенту України №18570, кл. В63В39/12, 1997р.]. Цей пристрій містить як мінімум чотири датчики рівня для контролю параметрів посадки плавзасобу, електрично з'єднаних через комутатор з вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок. Вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор. Розглянутий пристрій відрізняється оперативністю контролю параметрів плавзасобу. Вимірювання з використанням чотирьох датчиків вимагає попарного розміщення датчиків в площинах, паралельних основним конструктивним площинам: діаметральній та площині мідель-шпангоута; обчислення крену проводиться за даними вимірювання віддаленостей водної поверхні від пари датчиків, розміщених в площині, паралельній площині мідель-шпангоута; обчислення диференту проводиться за даними вимірювання віддаленостей водної поверхні від пари датчиків, розміщених в площині, паралельній діаметральній площині плавзасобу. Однак, даний пристрій не дозволяє отримувати параметри деформації корпусу плавзасобу. Відомо про пристрій контролю параметрів посадки і міцності плав споруди [по патенту України №11613, кл.В63В39/12, 2006р.], що містить як мінімум чотири датчики контролю осадки, крену, диференту, електрично з'єднаних через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного генератора з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, в якому додатково приєднані не менше чотирьох датчиків стрілок прогину, двох датчиків деформації корпусу, група датчиків рівня в баластових відсіках, при цьому датчики стрілок прогину розміщені між датчиками осадки й диференту уздовж бортів плавспоруди, а датчики деформації закріплені на обох бортах уздовж корпусу плавспоруди. Недоліком пристрою є те, що параметри деформації корпусу судна визначаються за даними додаткових датчиків системи. Найбільш близьким до заявленого за технічною суттю й результатом, що досягається, є пристрій для визначення осадки, крену та диференту плавзасобів [по патенту України № 61049, кл. В63В39/00, 2011р.]. Цей пристрій містить як мінімум три датчики рівня для контролю параметрів посадки плавзасобу, електрично з'єднаних через комутатор з вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок. Вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор. Розглянутий пристрій відрізняється оперативністю контролю та малою кількістю датчиків рівня, що використовуються. Вимірювання з використанням трьох датчиків дозволяє довільно розміщувати датчики, але не в одній вертикальній площині: за значеннями відстаней від водної поверхні до датчиків рівня розділу середовищ передбачає отримання вектора нормалі до водної (горизонтальної) поверхні в системі координат плавзасобу; кут крену знаходиться як кут між отриманою вище площиною водної поверхні та діаметральною площиною плавзасобу; кут диференту знаходиться як кут між площиною водної поверхні та площиною мідель-шпангоута плавзасобу, осадку отримують як відстань від заданої точки судна до площини водної поверхні. Недоліком пристрою є те, що при виході з ладу хоча б одного датчика неможливо визначити необхідні параметри. Також неможливо контролювати згинальні та крутильні деформації. Даний пристрій прийнятий як прототип. В основу корисної моделі поставлено задачу удосконалення пристрою для визначення осадки, крену та диференту плавзасобу, у якому шляхом підключення додаткових датчиків рівня та використання спеціальної схеми розташування датчиків забезпечується оперативний контроль параметрів експлуатації плавспоруди, особливо в умовах хвилювання, виміру параметрів деформації корпусу плавзасобу. Поставлена задача вирішується тим, що в пристрої для визначення осадки, крену, диференту та деформації корпуса плавзасобу, що містить датчики рівня, електрично з'єднані через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, згідно з пропозицією, збільшено загальну кількість датчиків як мінімум до 4, окремі датчики можуть бути згруповані та розміщені у носовій, кормовій частині плавзасобу, що дозволяє отримувати значення кутів крену та диференту або окремо для груп датчиків, або усереднені для всього плавзасобу, параметри посадки та параметри деформації корпусу судна, а також за рахунок збільшення кількості датчиків та використання алгоритму визначення кутів крену та диференту за даними 3-х датчиків підвищити загальну надійність роботи пристрою. 1 UA 99147 U 5 Пристрій визначення осадки, крену та диференту плавзасобу за значеннями відстаней від водної поверхні до датчиків рівня розділу середовищ з використанням датчиків рівня передбачає отримання вектора нормалі до водної (горизонтальної) поверхні (Nг ) в системі координат плавзасобу (Oxyz). Шляхом сполучення 3 датчиків з S (де S - загальна кількість датчиків, S3 ) та послідовного їх опитування, існує C способів отримання вектора нормалі до водної поверхні. S! . C CS 3 3! (S 3)! Наприклад, у випадку якщо S 6 : 6! 720 20 . 3! (6 3)! 36 Тобто вектор нормалі можливо отримати використовуючи різні комбінації з 3 будь-яких датчиків, що не розташовані в одній вертикальній площині. Далі наведено принцип обчислення вектора нормалі до водної площини за допомогою 3-х датчиків. Датчики мають координати: 1 x1, y1, z1); 2( x2, y2, z2 ); 3( x3, y3, z3 ) , що не належать одній ( вертикальній площині. Кожен датчик вимірює рівень розділу середовищ - відстань від 6 C C3 10 15 випромінювача до поверхні води zi zio ziT , де: zi - висота установки датчика відносно головної площини плавзасобу; zio - висота площини теоретичної ватерлінії (при стандартній осадці); z iT - поточне відхилення висоти поверхні води від розрахункової (при поточних значеннях 20 крену, диференту і осадці плавзасобу). Координати xi, yi, zi, zio (i 1 2, 3) - визначаються , конструкцією і в процесі експлуатації не змінюються. Таким чином, точки, які визначають площину водної поверхні (горизонту) в системі координат плавзасобу мають координати: 25 Mi ( x i , y i , zi zio ziT ), (i 1 2, 3) , Віднявши установочні відстані zi zio , отримуємо координати точок, які лежать на водній поверхні, в системі координат, де горизонтальна площина співпадає з площиною конструктивної ватерлінії. Лінійне рівняння площини водної поверхні в координатах системи, зв'язаної з плавзасобом (відносно x, y, z) ), має вигляд: 30 Ax By Cz D 0 Визначення кутів крену, диференту, носової та кормової осадок приведено для датчиків 1,2,3. Коефіцієнти рівняння (вони визначають площину) обчислюються за формулами: T T T T A y 2 z3 y 2 z1 y1 z3 y 3 z T y 3 z1 y1 zT ; 2 2 35 40 T T T T B x1 z3 x1 z T x 2 z1 x 2 z3 x 3 z T x 3 z1 ; 2 2 C x1 y2 x1 y3 x2 y3 x2 y1 x3 y1 x3 y2; T T T T C x1 y 2 z3 x1 y 3 zT x 2 y1 z3 x 3 y1 z T x 2 y 3 z1 x 3 y 2 z1 . 2 2 Кут крену знаходять як кут між отриманою вище площиною водної поверхні та діаметральною площиною плавзасобу. A A1 B B1 C C1 . cos() 2 2 2 A 2 B2 C2 A1 B1 C1 Загальне рівняння діаметральної площини плавзасобу має вигляд: , x 0; тут A1 1 B1 C1 D1 0) . Кут крену: arccos . 2 2 2 A B C A Диферент () : 2 UA 99147 U B . arccos 2 2 2 A B C Осадку отримують як відстань від заданої точки судна до площини водної поверхні Mн( xн, yн, zн ), Mк ( xк , yк , zк ), - координати носової і кормової марок: Тн 5 Тк A хн B yн C zн D ; A 2 B 2 C2 A хк B yк C zк D . A 2 B2 C2 За даними S датчиків визначається певна кількість варіантів значень кутів крену та диференту С . Остаточні значення крену та диференту можуть бути обчислені як середнє між усіма варіантами С сер, сер, або як середнє між значеннями, що обчислені за даними спеціально 10 відокремлених груп датчиків кількістю Сгр гр , гр : сер 20 25 30 35 40 45 C C 1 гр 1 гр i , гр C i . Cгр i1 гр i1 Визначення деформації корпуса у діаметральній площині та площині мідель-шпангоута ведеться на основі розбіжності у показаннях датчиків, розташованих у носовій та кормовій частині плавзасобу. Наприклад, у випадку, якщо датчики 1-3 знаходяться у носовій частині плавзасобу, а датчики 4-6 в кормовій, маємо наступні вирази для кутів кручення у діаметральній площині θ та кута згинання ψ у площині мідель-шпангоута плавзасобу: 123 456, 123 456 . гр 15 1 C , 1 C i сер C i C i1 i1 Таким чином, за рахунок використання спеціальної схеми розташування датчиків рівня та способу підвищується точність та надійність пристрою (вихід з ладу одного з датчиків не припиняє роботи системи в цілому), оскільки випадкова похибка зменшується при усередненні за результатами С вимірювань. Також з'являється можливість контролю деформацій корпуса відносно діаметральної площини та площини мідель-шпангоута, що важливо в умовах сильного хвилювання. Всі датчики посадки у своїй роботі використовують метод імпульсної рефлектометрії й мають єдине електронне й конструктивне виконання. На Фіг. 1 показано принципову схему пристрою для визначення осадки, крену та диференту плавзасобу. На Фіг. 2 представлено схему розміщення датчиків, вид зверху. На Фіг. 3 представлено схему розміщення датчиків, вид збоку. На Фіг. 4 представлено позначення висот в термінах датчиків рівня. Пристрій містить датчики рівня 1-6, вторинний прилад 7 містить у собі комутатор 8, високочастотний генератор 9 та приймач 10, послідовно з'єднані каналом зв'язку 11, обчислювальний блок 12 та індикатор 13. Датчики 1-6, вторинний прилад можуть бути виконані з використанням смужкових чутливих елементів. Пристрій працює наступним чином. Зондувальний імпульс із виходу високочастотного генератора 9 через комутатор 8 надходить в один із датчиків 1-6 (вибір датчика визначається спеціальним алгоритмом обчислювального пристрою 12) і одночасно на вхід високочастотного приймача 10. Потім імпульс, відбитий від неоднорідності вода-повітря (або кінця датчика), потрапляє на вхід приймача 10. Інтервал часу між зондувальним і відбитим імпульсами залежить від відстані між переходом вода-повітря й місцем установки вторинного приладу 7. Далі зондувальний і відбитий імпульси через канал зв'язку 11 надходять на вхід обчислювального блока 12, представляючи таким чином рефлектограму датчика. На підставі обмірюваного інтервалу часу обчислювальний блок 12 розраховує відстані до водної поверхні. Розраховані значення осадки та кутів крену і диференту, візуальна сигналізація критичних значень параметрів відображаються на індикаторі 13. Технічні переваги пристрою в порівнянні з прототипом: пристрій дозволяє контролювати більшу кількість параметрів; пристрій є більш надійним; пристрій є більш точним. Використання додаткових датчиків рівня та алгоритми пріоритетної обробки сигналів дозволяють надійність і точність виміру всіх параметрів. Заявлений пристрій придатний для широкого застосування в автоматизованих системах керування плавспорудою. 3 UA 99147 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Пристрій для визначення осадки, крену та диференту плавзасобу, що містить датчики рівня, електрично з'єднані через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, який відрізняється тим, що збільшено загальну кількість датчиків як мінімум до 4, окремі датчики можуть бути згруповані та розміщені у носовій, кормовій частині плавзасобу, що дозволяє отримувати значення кутів крену та диференту або окремо для груп датчиків, або усереднені для всього плавзасобу, параметри посадки та параметри деформації корпусу судна, а також за рахунок збільшення кількості датчиків та використання алгоритму визначення кутів крену та диференту за даними 3-х датчиків підвищити загальну надійність роботи пристрою. 4 UA 99147 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюHordeiev Borys Mykolaiovych, Zhukov Yurii Danylovych, Zivenko Oleksii Vasyliovych, Gudima Evgenii Anatoliyovych
Автори російськоюГордеев Борис Николаевич, Жуков Юрий Данилович, Зивенко Алексей Васильевич, Гудима Евгений Анатолиевич
МПК / Мітки
МПК: B63B 39/00
Мітки: визначення, плавзасобу, пристрій, посадки, корпуса, деформації, параметрів
Код посилання
<a href="https://ua.patents.su/7-99147-pristrijj-dlya-viznachennya-parametriv-posadki-ta-deformaci-korpusa-plavzasobu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення параметрів посадки та деформації корпуса плавзасобу</a>
Пристрій для визначення осадки, крену та диференту плавзасобу

Номер патенту: 61049
Опубліковано: 11.07.2011
Автори: Зівенко Олексій Васильович, Гордєєв Борис Миколайович, Жуков Юрій Даниїлович
МПК: B63B 39/00
Мітки: осадки, визначення, плавзасобу, диференту, пристрій, крену
Формула / Реферат:
Пристрій для визначення осадки, крену та диференту плавзасобу, що містить датчики рівня, електрично з'єднані через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, який відрізняється тим, що датчики рівня розташовані довільно, але не в одній вертикальній...
Пристрій контролю параметрів посадки і міцності плавспоруди
Номер патенту: 11613
Опубліковано: 16.01.2006
Автори: Жуков Юрій Даниїлович, Гордєєв Борис Миколайович, Кузьменко Олександр Вікторович
МПК: B63B 39/00
Мітки: контролю, плавспоруди, посадки, пристрій, параметрів, міцності
Формула / Реферат:
1. Пристрій контролю параметрів посадки і міцності плавспоруди, що містить як мінімум чотири датчики контролю осадки, крена, диферента, електрично з'єднаних через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, який відрізняється тим, що додатково приєднані...
Пристрій для визначення осадки, крену і диференту плавзасобу
Номер патенту: 18570
Опубліковано: 25.12.1997
Автори: Половніков Валєрій Алєксандровіч, Алєксандров Михайло Миколайович, Гордєєв Борис Миколайович, Жуков Юрій Даниїлович
МПК: B63B 39/00
Мітки: крену, плавзасобу, диференту, пристрій, визначення, осадки
Формула / Реферат:
Устройство для определения осадки, крена и дифферента плавсредства, содержащее по меньшей мере четыре датчика и вторичный прибор с коммутатором и индикатором, причем каждый из датчиков подключен к коммутатору, отличающееся тем, что вторичный прибор содержит вычислительный блок им последовательно соединенные импульсный высокочастотный генератор и высокочастотный приемник, причем упомянутый генератор электрически связан с коммутатором, а выход...
Пристрій для визначення параметрів різнорідних незмішуваних середовищ
Номер патенту: 6632
Опубліковано: 16.05.2005
Автори: Жуков Юрій Даниїлович, Гордєєв Борис Миколаєвич
МПК: G01F 23/28, G01B 15/02
Мітки: середовищ, визначення, різнорідних, параметрів, незмішуваних, пристрій
Формула / Реферат:
1. Пристрій для визначення параметрів різнорідних незмішуваних середовищ, що містить датчик, виконаний у вигляді принаймні одного провідника, підключений до виходу генератора зондувального сигналу та входу приймача зондувального та відбитого сигналів, який відрізняється тим, що містить два датчики, установлені по обидва боки проміжного шару різнорідних незмішуваних середовищ таким чином, що їхні провідники спрямовані у зустрічних напрямках....
Пристрій для установки датчика ехолота на корпусі плавзасобу
Номер патенту: 90554
Опубліковано: 26.05.2014
Автор: Крупський Іван Олексійович
МПК: F16B 45/00, A01K 79/00
Мітки: корпусі, ехолота, плавзасобу, датчика, установки, пристрій
Формула / Реферат:
1. Пристрій для кріплення датчика ехолота, що містить вузол кріплення до корпусу плавучого засобу, який виконаний у вигляді струбцини, профільний корпус та тримач датчика ехолота, в верхній частині якого виконаний отвір, який відрізняється тим, що вузол кріплення та тримач датчика ехолота виконані з можливістю роз'ємного з'єднання з профільним корпусом, на зовнішній стороні установочної площадки рами струбцини виконано поздовжній паз...
Попередній патент: Вагон-цистерна для затвердівальних продуктів
Наступний патент: Повітряний холодильник
Випадковий патент: Спосіб одержання концентрату рідкої форми антимікробного препарату для інфузій