Система валків
Формула / Реферат
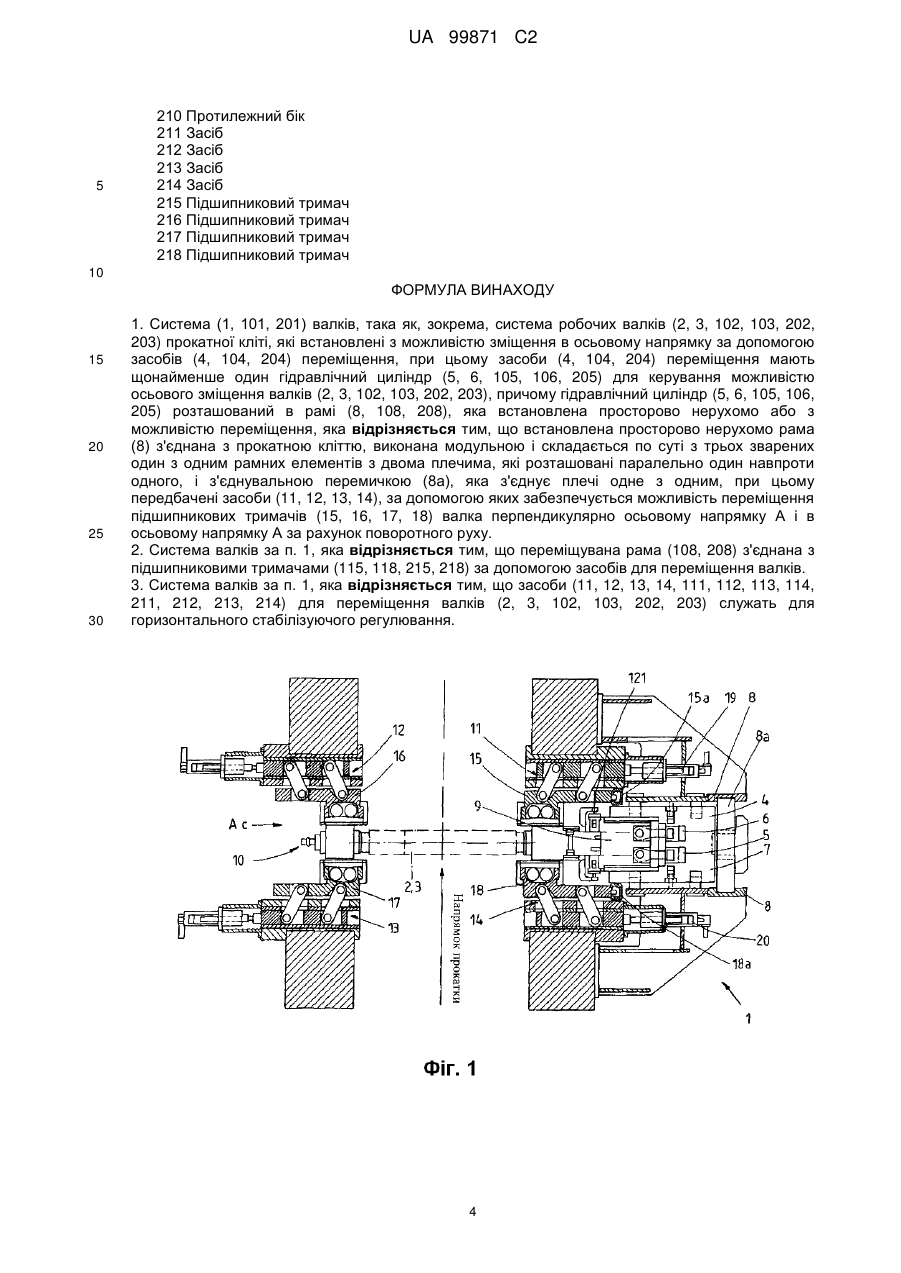
1. Система (1, 101, 201) валків, така як, зокрема, система робочих валків (2, 3, 102, 103, 202, 203) прокатної кліті, які встановлені з можливістю зміщення в осьовому напрямку за допомогою засобів (4, 104, 204) переміщення, при цьому засоби (4, 104, 204) переміщення мають щонайменше один гідравлічний циліндр (5, 6, 105, 106, 205) для керування можливістю осьового зміщення валків (2, 3, 102, 103, 202, 203), причому гідравлічний циліндр (5, 6, 105, 106, 205) розташований в рамі (8, 108, 208), яка встановлена просторово нерухомо або з можливістю переміщення, яка відрізняється тим, що встановлена просторово нерухомо рама (8) з'єднана з прокатною кліттю, виконана модульною і складається по суті з трьох зварених один з одним рамних елементів з двома плечима, які розташовані паралельно один навпроти одного, і з'єднувальною перемичкою (8а), яка з'єднує плечі одне з одним, при цьому передбачені засоби (11, 12, 13, 14), за допомогою яких забезпечується можливість переміщення підшипникових тримачів (15, 16, 17, 18) валка перпендикулярно осьовому напрямку А і в осьовому напрямку А за рахунок поворотного руху.
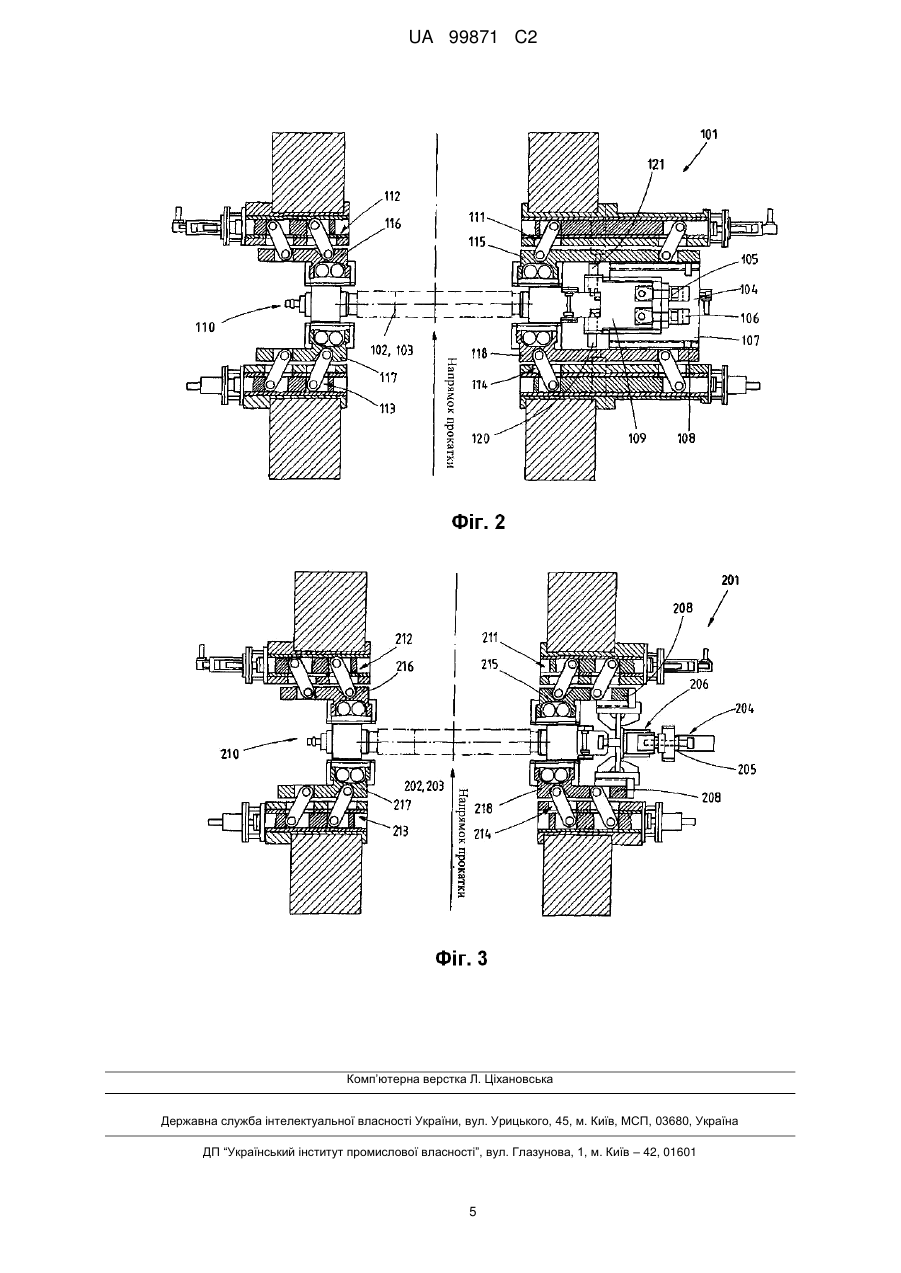
2. Система валків за п. 1, яка відрізняється тим, що переміщувана рама (108, 208) з'єднана з підшипниковими тримачами (115, 118, 215, 218) за допомогою засобів для переміщення валків.
3. Система валків за п. 1, яка відрізняється тим, що засоби (11, 12, 13, 14, 111, 112, 113, 114, 211, 212, 213, 214) для переміщення валків (2, 3, 102, 103, 202, 203) служать для горизонтального стабілізуючого регулювання.
Текст
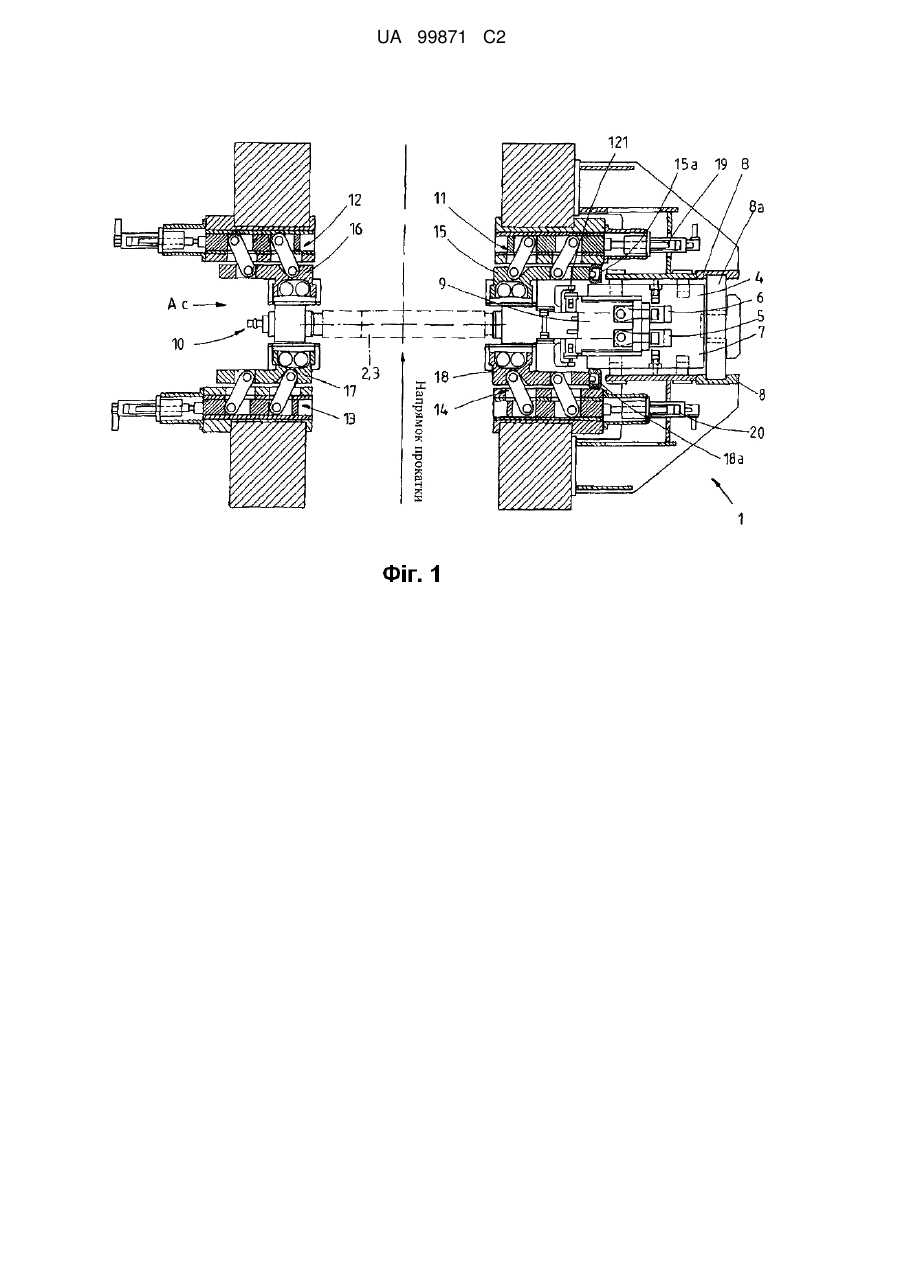
Реферат: Винахід стосується системи (1, 101, 201) валків, такої як, зокрема, система робочих валків (2, 3, 102, 103, 202, 203) прокатної кліті, які встановлені з можливістю зміщення в осьовому напрямку за допомогою засобів (4, 104, 204) переміщення, при цьому засоби (4, 104, 204) переміщення мають щонайменше один гідравлічний циліндр (5, 6, 105, 106, 205), який керує можливістю осьового зміщення валків, яка відрізняється тим, що гідравлічний циліндр розташований в рамі, яка встановлена просторово нерухомо або з можливістю переміщення. UA 99871 C2 (12) UA 99871 C2 UA 99871 C2 5 10 15 20 25 30 35 40 45 50 55 60 Галузь техніки, до якої належить винахід Винахід стосується системи валків, такої як, зокрема, система робочих валків прокатної кліті. Рівень техніки Для обробки прокату, зокрема, для обробки плоских металевих або сталевих штабів відомі прокатні кліті з системами робочих валків. Для таких систем валків відомі також пристрої для зміщення валків, з метою досягнення поліпшення якості штаби. Можна назвати публікації ЕР 0154896 В1, ЕР 0118812 B1, DE 2522213 А1, в яких розкриті системи валків з засобами, які спрямовують валки, так, що забезпечується можливість переміщення валків в площині, перпендикулярній осі валків. Крім того, в DE 3521180 А1 розкрита система валків з пристроєм для осьового переміщення валків, при цьому валок спирається на встановлені з можливістю ковзання подушки і може переміщуватися за допомогою гідравлічних циліндрів, які спираються на станину прокатної кліті і балку підшипника. Такі переміщувані в осьовому напрямку системи валків використовуються для забезпечення можливості здійснення впливу через шліфовані поверхні робочих і проміжних валків на контур осередку деформації. Такі системи валків з пристроями осьового зміщення згідно з рівнем техніки мають відносно складну конструкцію. Суть винаходу Задачею даного винаходу є створення системи валків, такої як, зокрема, системи робочих валків прокатної кліті, за допомогою якої досягається можливість простого осьового зміщення і запобігаються недоліки рівня техніки. Задача вирішена згідно з винаходом за допомогою системи валків, такої як, зокрема, система робочих валків прокатної кліті, які встановлені з можливістю осьового зміщення за допомогою засобів переміщення, при цьому засоби переміщення мають щонайменше один гідравлічний циліндр, який керує можливістю зміщення валків, яка відрізняється тим, що гідравлічний циліндр розташований в рамі, яка встановлена просторово нерухомо або з можливістю переміщення. При цьому гідравлічний циліндр служить для осьового зміщення валка. При цьому повинні сприйматися виникаючі при цьому сили, що, переважно, реалізовано за рахунок конструкції рами, в якій розміщені засоби переміщення, такі як, наприклад, зсувний блок. Приведення в дію, переважно, здійснюється через підшипниковий тримач, а також через циліндри, розміщені в перемичці, яка з'єднує обидва плеча рами. При цьому розташована просторово нерухомо рама доцільно з'єднана з прокатною кліттю. З'єднана з прокатною кліттю рама представляє компактне і недороге рішення, оскільки виникаючі в процесі прокатки і під час осьового зміщення сили знов сприймаються прокатною кліттю. Крім того, переважно, коли рама складається зі зварених один з одним елементів рами. При зварній рамі рама складається, переважно, з трьох істотних частин, які зварені одна з одною, при цьому два плеча лежать паралельно один навпроти одного і з'єднані через перемичку. Згідно з іншим переважним прикладом виконання винаходу, переважно, коли переміщувана рама з'єднана з підшипниковими тримачами засобів для переміщення або регулювання валків. Для цього можна зсувати, зокрема, для горизонтального стабілізуючого регулювання, підшипникові тримачі в напрямку прокатки або в протилежному напрямку. Переміщувана частина рами також виконує цей рух, для того, щоб осьова сила з процесу прокатки і/або необхідна сила зміщення була, переважно, спрямована посередині валка і, переважно, перпендикулярно напрямку прокатки. Переважно, при горизонтальному стабілізуючому регулюванні підшипникові тримачі зсуваються в напрямку прокатки або в протилежному напрямку. Переміщувана частина рами також виконує цей рух, для того, щоб осьова сила з процесу прокатки і/або необхідна сила зміщення завжди проходила по суті посередині валка і перпендикулярно напрямку прокатки. При цьому додатково переважно, коли засоби для переміщення або регулювання валків служать для горизонтального стабілізуючого регулювання. При горизонтальному стабілізуючому регулюванні, тобто, зміщенні в напрямку прокатки або в протилежному напрямку, переважно, коли відбувається переміщення зсувного або переміщуваного блока. Переважні модифікації вказані в залежних пунктах формули винаходу. Короткий опис креслень Нижче наводиться більш докладне пояснення винаходу з посиланнями на прикладені креслення, на яких зображено: фіг. 1 - перший приклад виконання пристрою згідно з винаходом; 1 UA 99871 C2 5 10 15 20 25 30 35 40 45 50 55 60 фіг. 2 - другий приклад виконання пристрою згідно з винаходом; і фіг. 3 - третій приклад виконання пристрою згідно з винаходом. Переважні варіанти виконання винаходу На всіх фігурах однакові технічні елементи позначені однаковими позиціями. На фіг. 1 показаний на вигляді зверху перший приклад виконання системи 1 валків з переміщуваними в осьовому напрямку валками 2, 3, яких за допомогою зсувного блока або засобів 4 переміщення можна зміщувати в осьовому напрямку на боці приводу прокатної кліті. При цьому повинні сприйматися виникаючі сили. Це відбувається за рахунок рами 8 або, відповідно, за рахунок рамної конструкції, в якій розміщені зсувний блок або, відповідно, засоби 4 переміщення. Для цього засіб 4 переміщення має два гідравлічних циліндри 5, 6, які розміщені в одному блоці 7, який в свою чергу міститься в рамі 8. Рама, переважно, складається із зварної рами, яка складена з рамних елементів і зварена і, в якій розміщені засоби 4 переміщення. Ці засоби 4 переміщення переміщуються, переважно, в напрямку прокатки або в протилежному напрямку за допомогою підшипникових тримачів 15, 15а, 18, 18а, а також розташованих в нерухомій рамі циліндрів 19, 20. Гідравлічні циліндри 5, 6 впливають на блок 9, який здійснює блокування робочих валків. На боці керування і боці 10 приводу валки 2, 3 розміщені з можливістю ковзання, так, що вони ще утримуються також при зміщенні гідравлічних циліндрів 5, 6. Крім того, передбачені засоби 11, 12, 13 і 14, за допомогою яких забезпечується можливість переміщення підшипникових тримачів 15, 16, 17, 18 валків також перпендикулярно напрямку осі А і в напрямку осі за рахунок поворотного руху. Це виконання з просторово нерухомо з'єднаною з прокатною кліттю рамою є переважним, оскільки рама 8 є компактною і більш дешевою у виготовленні в порівнянні з рамою, яка повинна бути розташована на оточуючому фундаменті, оскільки виникаючі в процесі прокатки і під час осьового зсування валків сили знову сприймаються прокатною кліттю. Рама 8 виконана, як вказувалося вище, у вигляді зварної конструкції. Це має ту перевагу, що її можна виконувати модульно з елементів рами. Вона може, переважно, складатися з трьох рамних елементів, при цьому на фіг. 1 показані обидва плеча рами 8 зі з'єднувальною перемичкою 8а, яка, переважно, з'єднує плечі. На фіг. 2 показаний другий переважний приклад виконання системи 101 валків з двома переміщуваним в осьовому напрямку валками 102, 103, які можна зміщувати в осьовому напрямку на боці приводу за допомогою засобів 104 переміщення. Для цього засіб 104 переміщення має два гідравлічних циліндри 105, 106, які розміщені в блоці 107, який в свою чергу міститься в рамі 108. Рама 108, переважно, виконана у вигляді однієї частини з підшипниковими тримачами 118, 115. У цьому випадку засоби 111, 114 також служать для повороту підшипникових тримачів. Засоби 104 переміщення розташовані в рамі 108. Гідравлічні циліндри 105, 106 впливають на блок 109, в якому розміщене блокування робочих валків. Засоби 111 і 114 служать також для горизонтального стабілізуючого регулювання. На боці 110 керування обома валками 102, 103 прокатних клітей обидва валки встановлені з можливістю ковзання, так, що за рахунок зміщення на основі керування гідравлічними циліндрами 105, 106 валки 102, 103 містяться з можливістю переміщення. Крім того, ще передбачені засоби 111, 112, 113 і 114, за допомогою яких забезпечується можливість переміщення валків 102, 103 також перпендикулярно осьовому напрямку і в осьовому напрямку за рахунок поворотного руху. Для блокування положення валків застосовуються блокувальні циліндри 120, 121, які виконані з можливістю всування. Хоча показаний на фіг. 2 пристрій згідно з винаходом вимагає більш довгих циліндричних блоків для блоків зсунення засобів 111, 112, 113 і 114, він, проте, виконаний дуже компактним в напрямку, перпендикулярному осям валків. На фіг. 3 показаний третій переважний приклад виконання системи 201 валків з двома переміщуваним в осьовому напрямку валками 202, 203, які можна зміщувати в осьовому напрямку на привідному боці прокатної кліті за допомогою засобів 204 переміщення. Для цього засіб 204 переміщення має гідравлічний циліндр 205, який має поршневий шток, що повертається за допомогою поворотного приводу, з метою досягнення пересування валків. Блокування положення валків здійснюється, переважно, за допомогою поворотного руху. Ця система міститься в свою чергу в рамі 208. Рама 208, переважно, виконана у вигляді однієї частини з підшипниковими тримачами 218, 215. Засоби 211, 214 служать для переміщення валків 202, 203. У рамі 208 розміщені засоби 204 переміщення. 2 UA 99871 C2 5 10 15 20 25 30 35 40 45 50 55 60 На боці керування і привідному боці 210 обох валків 202, 203 валки встановлені з можливістю ковзання, так, що за рахунок зміщення на основі керування гідравлічним циліндром 205 валки 202, 203 утримуються з можливістю переміщення. Крім того, ще передбачені засоби 211, 212, 213 і 214, за допомогою яких забезпечується можливість переміщення підшипникових тримачів 215, 216, 217, 218 валків 202, 203 також перпендикулярно осьовому напрямку і в осьовому напрямку за рахунок поворотного руху. Показаний на фіг. 3 пристрій згідно з винаходом також виконаний дуже компактним. Також як у вказаних вище прикладах виконання один валок показаний з можливістю переміщення, так, що для кожного валка передбачені гідравлічні циліндри 5, 6, 105, 106, 205, з метою забезпечення можливості зміщення обох валків 2, 3, 102, 103, 202, 203 незалежно один від одного. Перелік позицій 1 Система валків 2 Валок 3 Валок 4 Засіб переміщення 6 Засіб переміщення 7 Блок 8 Рама 9 Блок 10 Протилежний бік 11 Засіб 12 Засіб 13 Засіб 14 Засіб 15 Підшипниковий тримач 15а Підшипниковий тримач 16 Підшипниковий тримач 17 Підшипниковий тримач 18 Підшипниковий тримач 18а Підшипниковий тримач 19 Циліндр 20 Циліндр 101 Система валків 102 Валок 103 Валок 104 Засіб переміщення 105 Гідравлічний циліндр 106 Гідравлічний циліндр 107 Блок 108 Рама 109 Блок 110 Протилежний бік 111 Засіб 112 Засіб 113 Засіб 114 Засіб 115 Підшипниковий тримач 116 Підшипниковий тримач 117 Підшипниковий тримач 118 Підшипниковий тримач 201 Система валків 202 Валок 203 Валок 204 Засіб переміщення 205 Гідравлічний циліндр 206 Поворотний привід 207 Блок 208 Рама 209 Блок 3 UA 99871 C2 5 210 Протилежний бік 211 Засіб 212 Засіб 213 Засіб 214 Засіб 215 Підшипниковий тримач 216 Підшипниковий тримач 217 Підшипниковий тримач 218 Підшипниковий тримач 10 ФОРМУЛА ВИНАХОДУ 15 20 25 30 1. Система (1, 101, 201) валків, така як, зокрема, система робочих валків (2, 3, 102, 103, 202, 203) прокатної кліті, які встановлені з можливістю зміщення в осьовому напрямку за допомогою засобів (4, 104, 204) переміщення, при цьому засоби (4, 104, 204) переміщення мають щонайменше один гідравлічний циліндр (5, 6, 105, 106, 205) для керування можливістю осьового зміщення валків (2, 3, 102, 103, 202, 203), причому гідравлічний циліндр (5, 6, 105, 106, 205) розташований в рамі (8, 108, 208), яка встановлена просторово нерухомо або з можливістю переміщення, яка відрізняється тим, що встановлена просторово нерухомо рама (8) з'єднана з прокатною кліттю, виконана модульною і складається по суті з трьох зварених один з одним рамних елементів з двома плечима, які розташовані паралельно один навпроти одного, і з'єднувальною перемичкою (8а), яка з'єднує плечі одне з одним, при цьому передбачені засоби (11, 12, 13, 14), за допомогою яких забезпечується можливість переміщення підшипникових тримачів (15, 16, 17, 18) валка перпендикулярно осьовому напрямку А і в осьовому напрямку А за рахунок поворотного руху. 2. Система валків за п. 1, яка відрізняється тим, що переміщувана рама (108, 208) з'єднана з підшипниковими тримачами (115, 118, 215, 218) за допомогою засобів для переміщення валків. 3. Система валків за п. 1, яка відрізняється тим, що засоби (11, 12, 13, 14, 111, 112, 113, 114, 211, 212, 213, 214) для переміщення валків (2, 3, 102, 103, 202, 203) служать для горизонтального стабілізуючого регулювання. 4 UA 99871 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюRoller arrangement
Автори англійськоюFilk, Edgar
Назва патенту російськоюСистема валков
Автори російськоюФилк Эдгар
МПК / Мітки
МПК: B21B 31/18, B21B 31/28
Код посилання
<a href="https://ua.patents.su/7-99871-sistema-valkiv.html" target="_blank" rel="follow" title="База патентів України">Система валків</a>
Система калібрів валків прокатного стана
Номер патенту: 62181
Опубліковано: 15.12.2003
Автори: Цімашпольські Уладзімір Ісаакавіч, Рябцав Алег Віктаравіч, Тішчанка Уладзімір Андрєявіч, Курбатав Генадзь Аляксандравіч, Жучков Сергій Михайлович, Луценко Владислав Анатолійович, Матачкін Віктар Аркадзєвіч, Сцяблов Анвєр Барисавіч, Шувякова Ірина Володимирівна, Бандаренка Аляксандр Мікалаєвіч
МПК: B21B 1/02
Мітки: стана, калібрів, система, валків, прокатного
Формула / Реферат:
1. Система калібрів валків прокатного стана, переважно реверсивного, для строєної прокатки-поділу, що містить чорновий, проміжний і чистовий трирівчакові калібри, яка відрізняється тим, що чорновий трирівчаковий калібр виконано у вигляді строєних овалів, врізаних у валки по їх великих осях, проміжний трирівчаковий калібр виконано у вигляді строєних ромбів, врізаних у валки по їх великих діагоналях, а чистовий трирівчаковий калібр виконано у...
Система калібрування валків безперервного сортового стана
Номер патенту: 53779
Опубліковано: 17.02.2003
Автори: Парусов Володимир Васильович, Лохматов Олександр Павлович, Оробцев Андрій Юрійович, Літвінов Леонід Федорович, Сівак Едуард Володимирович, Шишко Юрій Борисович, Шевердін Сергій Митрофанович, Букрєєв Іван Іванович, Димченко Євген Миколайович, Парусов Олег Володимирович, Жучков Сергій Михайлович, Кулаков Леонід Васильович, Шувякова Ірина Володимировна
МПК: B21B 1/02
Мітки: безперервного, стана, система, сортового, калібрування, валків
Формула / Реферат:
Система калібрування валків безперервного сортового стана, переважно для здвоєної прокатки-розділяння, що містить калібри для деформування вихідної заготівки, калібр для одержання проміжного розкату, калібр із горизонтальною великою і вертикальною малою осями, діагональний квадратний калібр з округленими ребрами й опуклостями на його гранях, виконаними по радіусу, чорновий здвоєний калібр, розділювальний калібр і наступні калібри для...
Спосіб і пристрій для маніпулювання/транспортування робочих валків і/або опорних валків
Номер патенту: 93895
Опубліковано: 25.03.2011
Автор: Блехер Герхард
МПК: B21B 28/00, B21B 31/00
Мітки: робочих, опорних, спосіб, валків, пристрій
Формула / Реферат:
1. Пристрій для маніпулювання/транспортування робочих (7, 8) і/або опорних (5, 6) валків, що містить опорну конструкцію у вальцетокарній майстерні (2) для прийому робочих валків (7, 8) прокатної кліті, який відрізняється тим, що опорна конструкція (26) має перевальний візок (31), причому на верхній стороні (29) опорної конструкції (26) виконані рейки (30), на які спирається перевальний візок (31) з можливістю переміщування у бічному напрямку...
Система калібрів валків чорнової групи клітей безперервного сортопрокатного стана
Номер патенту: 87541
Опубліковано: 27.07.2009
Автори: Анелькін Мікалай Івановіч, Луценко Владислав Анатолійович, Бобкоу Пятро Аляксандравіч, Жучков Сергій Михайлович, Андриянау Мікалай Віктаравіч, Матачкін Віктар Аркадзєвіч, Мурикау Максім Анатольєвіч, Кірилєнка Алег Міхайлавіч
МПК: B21B 1/02
Мітки: стана, групи, система, клітей, чорнової, валків, калібрів, сортопрокатного, безперервного
Формула / Реферат:
Система калібрів валків чорнової групи клітей безперервного сортопрокатного стана, що містить поперемінні по ходу технологічного процесу чотири овальних калібри, які розміщені у непарних клітях чорнової групи стана, та чотири круглих калібри, якірозміщені у парних клітях чорнової групи стана, із заданими геометричними параметрами - глибиною врізу рівчака й шириною калібру, яка відрізняється тим, що відношення ширини калібру до глибини врізу...
Прокатний стан з регулюванням валків по двом напрямкам
Номер патенту: 66910
Опубліковано: 15.06.2004
Автори: Жао Лінжен, Женг Хонгжуан
МПК: B21B 29/00, B21B 1/22
Мітки: валків, регулюванням, напрямкам, прокатній, двом, стан
Формула / Реферат:
1. Прокатний стан для прокатки листа і штаби, що складається з рами стана (10), верхньої системи валків і нижньої системи валків, верхнього люнета і нижнього люнета та притискних пристроїв (9) для регулювання величини проміжку між валками, в якому згадані верхня і нижня системи валків виконані таким чином, що мають вежоподібну конфігурацію, який відрізняється тим, що один з люнетів складається з першого середнього люнета, перших бокових...
Попередній патент: Спосіб покращення екологічної ситуації у вуглевидобувних районах
Наступний патент: Універсальний апарат для черезкісткового остеосинтезу
Випадковий патент: Спосіб лікування переломів п'яткової кістки