Маніпулятор кришок розливних жолобів
Номер патенту: 100280
Опубліковано: 27.07.2015
Автори: Удовенко Сергій Олександрович, Залевський Костянтин Едуардович, Єрін Вадим Валерійович, Михайлов Микола Олексійович, Дзержинський Віталій Олександрович, Волошин Олексій Іванович
Формула / Реферат
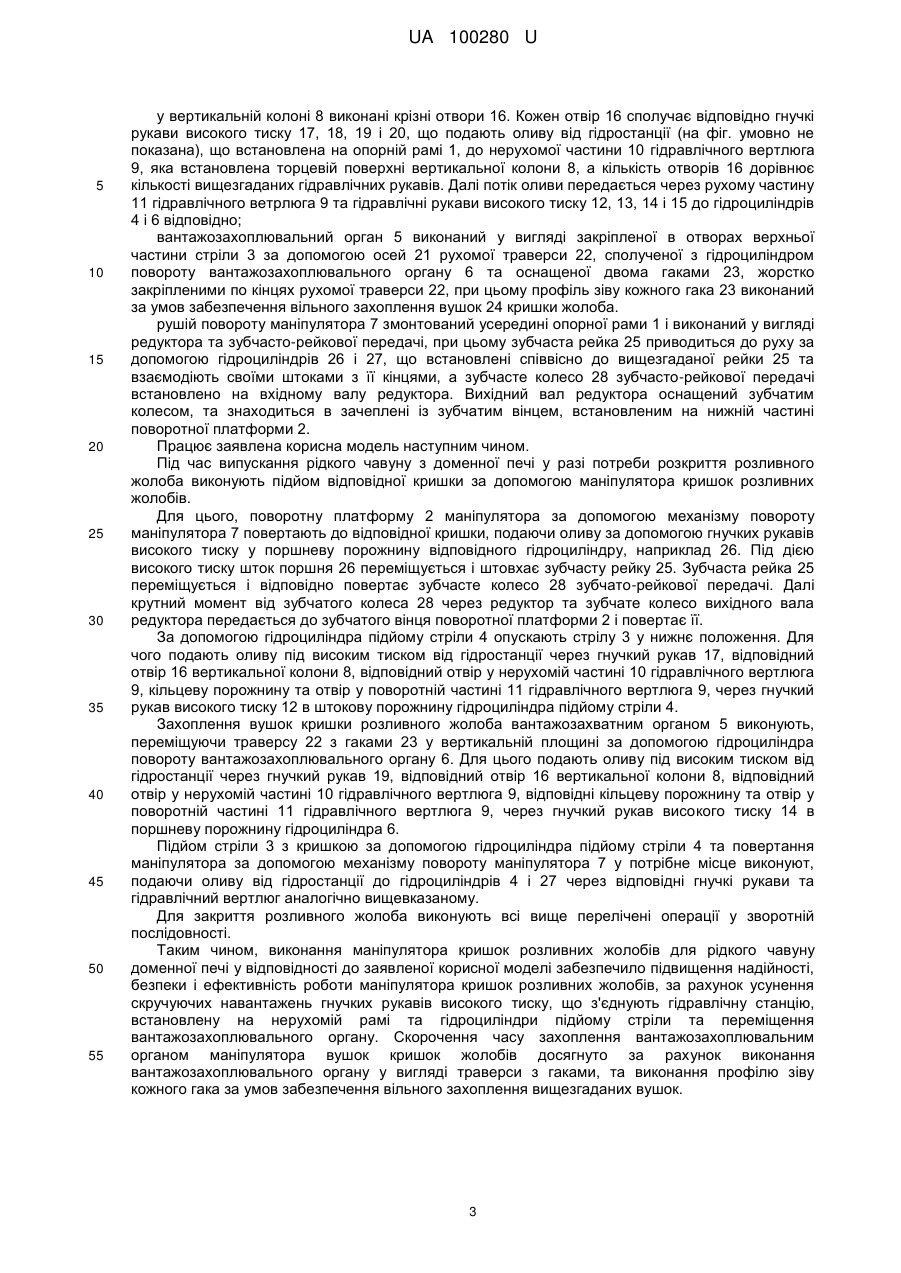
1. Маніпулятор кришок розливних жолобів, що містить опорну раму з вертикальною колоною, встановлену на вертикальній колоні поворотну платформу з механізмом повороту, стрілою з вантажозахоплювальним органом, гідроциліндром підйому стріли і гідроциліндром повороту вантажозахоплювального органу, гідросистему з гідростанцією, який відрізняється тим, що маніпулятор додатково оснащений пристроєм передачі потоку гідравлічної рідини високого тиску від опорної рами до поворотної платформи у вигляді гідравлічного вертлюга, нерухома частина якого встановлена на верхній торцевій поверхні вертикальної колони, а рухома частина закріплена до поворотної платформи та сполучена за допомогою гнучких гідравлічних магістралей з гідроциліндром підйому стріли та гідроциліндром повороту вантажозахоплювального органу відповідно, крім того у вертикальній колоні додатково виконані крізні отвори, що паралельні до осі колони та з’єднують відповідні отвори нерухомої частини гідравлічного вертлюга з гідравлічними магістралями гідростанції, а вантажозахоплювальний орган виконаний у вигляді рухомої траверси, закріпленої в отворах верхньої частини стріли за допомогою осей і оснащеної гаками, розміщеними по кінцях нижньої поверхні траверси, при цьому, профіль зіву кожного гака забезпечує вільне захоплення вушок кришки жолоба.
2. Маніпулятор кришок розливних жолобів за п. 1, який відрізняється тим, що механізм повороту маніпулятора розміщений усередині опорної рами та виконаний у вигляді зубчасто-рейкової передачі, при цьому зубчасте колесо змонтоване на нижній поверхні поворотної платформи, а рейка - на опорній рамі та приводиться до руху за допомогою гідроциліндрів, встановлених співвісно до рейки та взаємодіючих штоками з її кінцями.
Текст
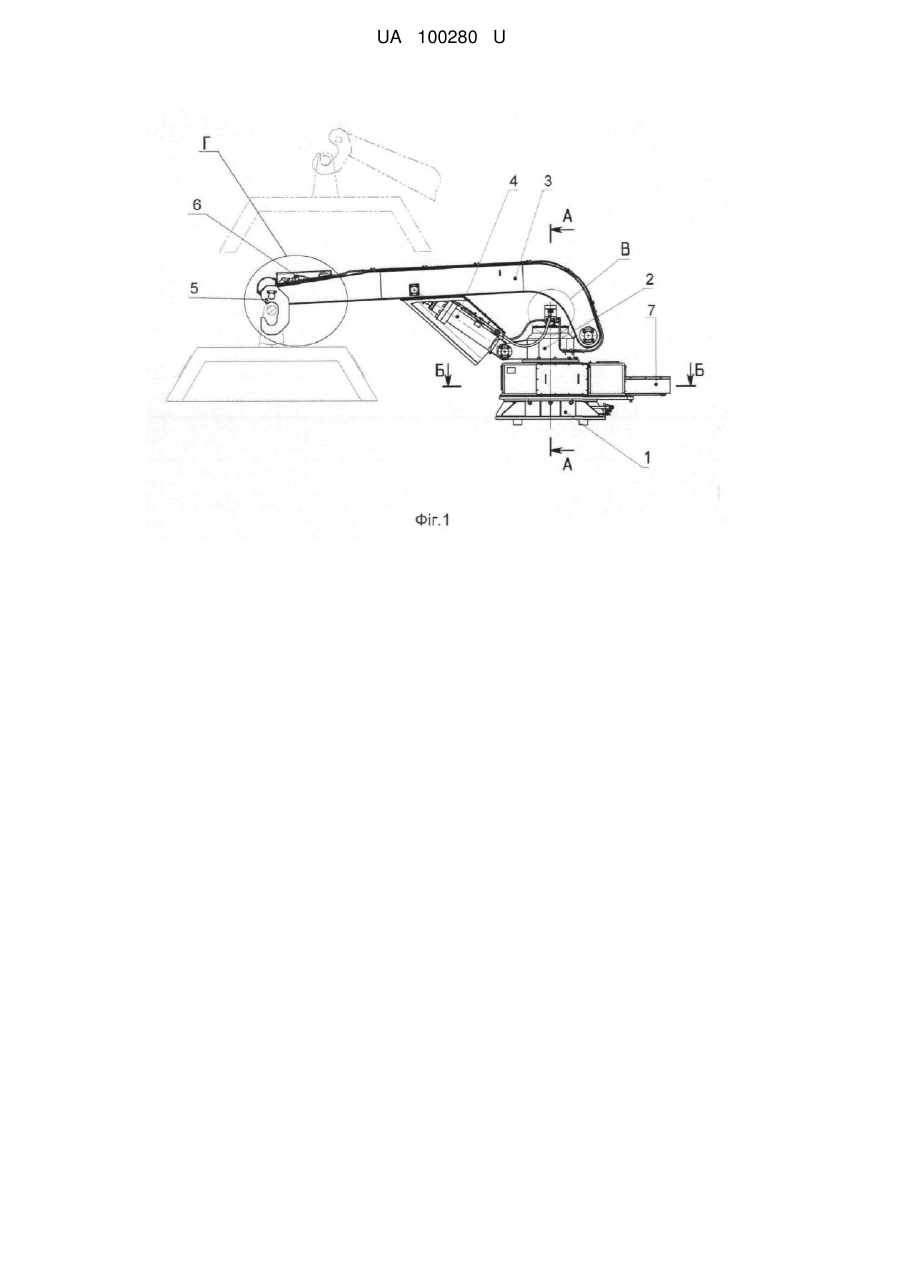
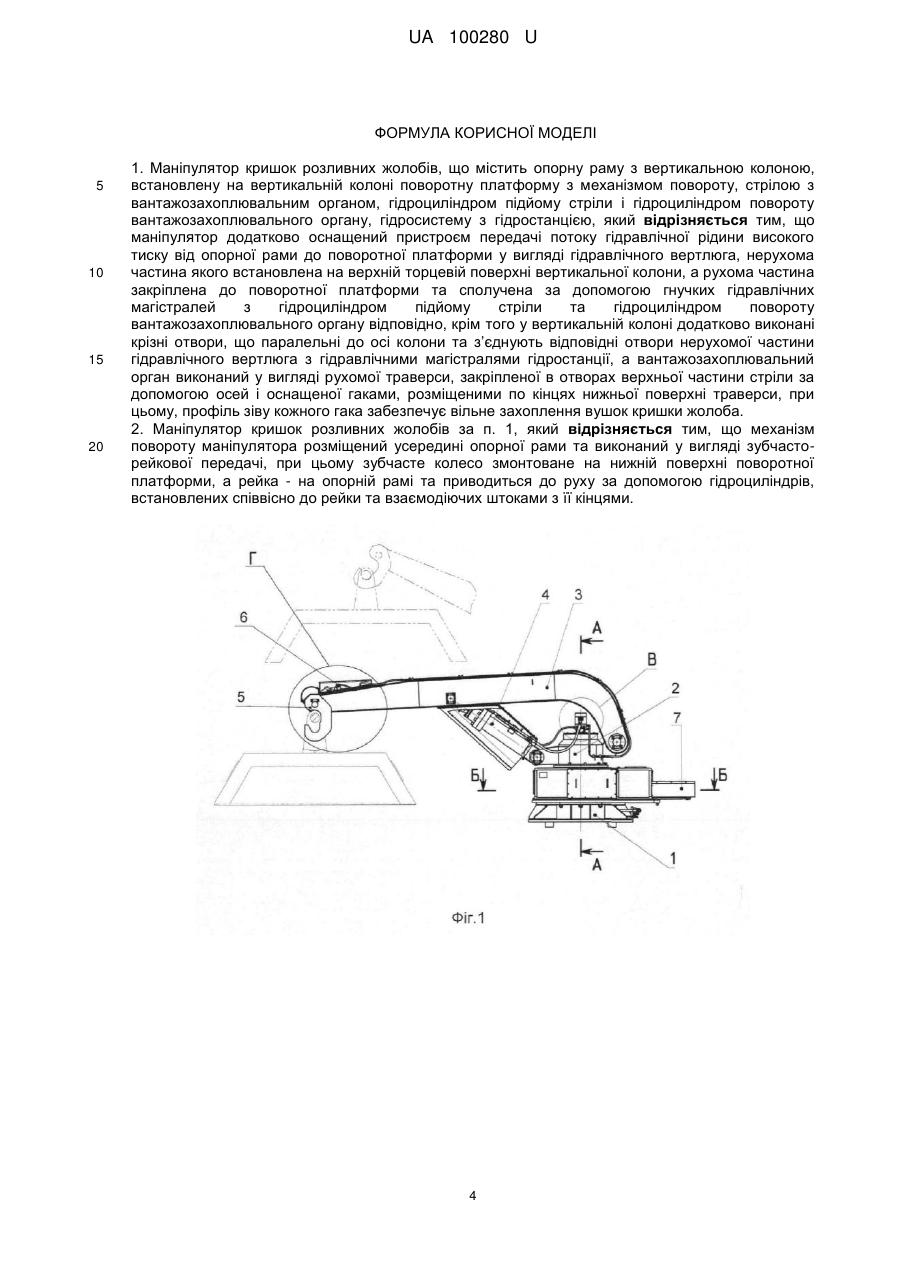
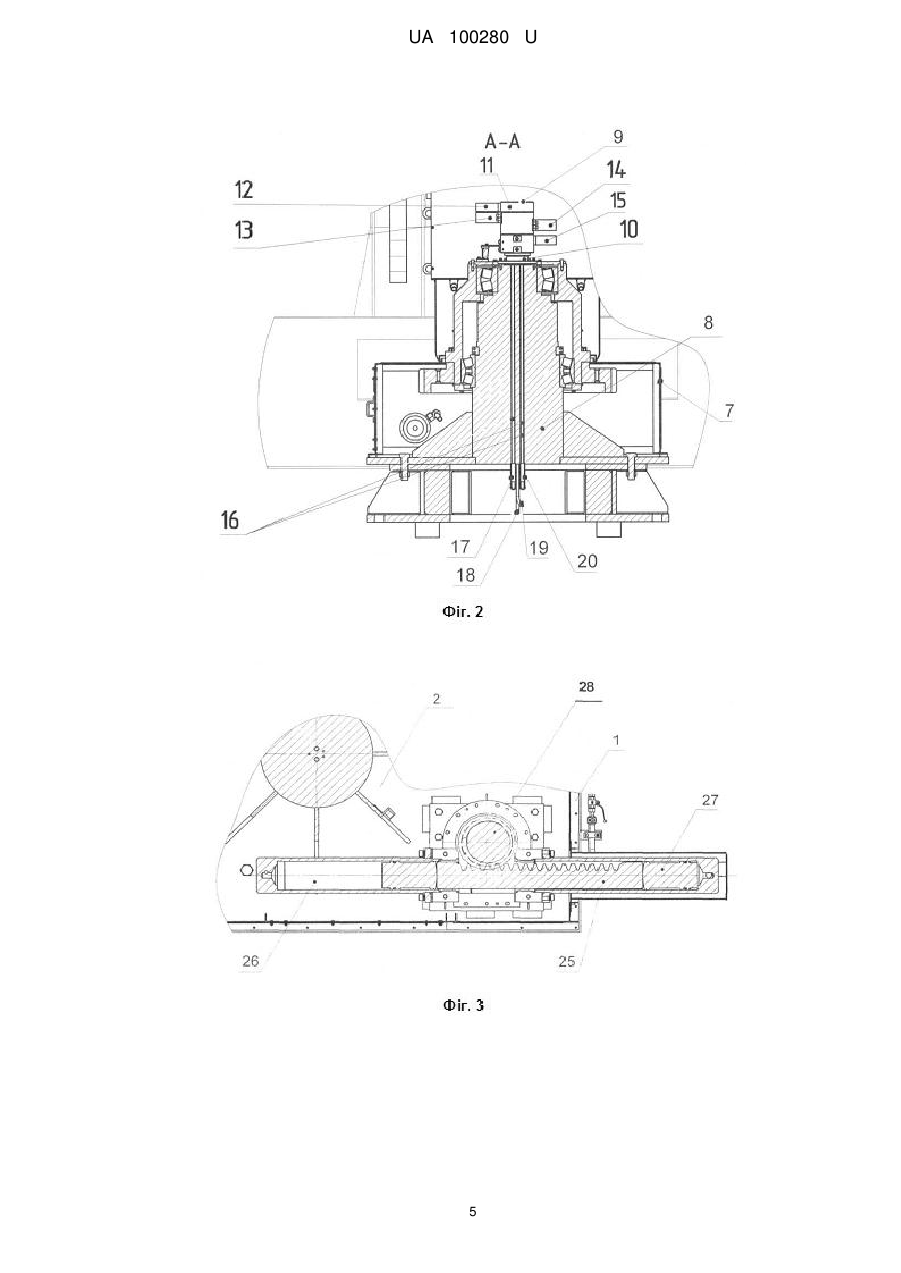
Реферат: Маніпулятор кришок розливних жолобів містить опорну раму з вертикальною колоною, встановлену на вертикальній колоні поворотну платформу з механізмом повороту, стрілою з вантажозахоплювальним органом, гідроциліндром підйому стріли і гідроциліндром повороту вантажозахоплювального органу, гідросистему з гідростанцією. Маніпулятор додатково оснащений пристроєм передачі потоку гідравлічної рідини високого тиску від опорної рами до поворотної платформи у вигляді гідравлічного вертлюга, нерухома частина якого встановлена на верхній торцевій поверхні вертикальної колони, а рухома частина закріплена до поворотної платформи та сполучена за допомогою гнучких гідравлічних магістралей з гідроциліндром підйому стріли та гідроциліндром повороту вантажозахоплювального органу відповідно. Крім цього у вертикальній колоні додатково виконані крізні отвори, що паралельні до осі колони та з’єднують відповідні отвори нерухомої частини гідравлічного вертлюга з гідравлічними магістралями гідростанції, а вантажозахоплювальний орган виконаний у вигляді рухомої траверси, закріпленої в отворах верхньої частини стріли за допомогою осей і оснащеної гаками, розміщеними по кінцях нижньої поверхні траверси, при цьому профіль зіву кожного гака забезпечує вільне захоплення вушок кришки жолоба. UA 100280 U (12) UA 100280 U UA 100280 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі доменного виробництва, а саме до устаткування ливарного двору, зокрема до маніпуляторів для переміщення кришок розливних жолобів для розливання рідкого чавуну, і може бути використана під час проектування нових та модернізації існуючих ливарних дворів. Розливні жолоби доменної печі розташовані на ливарному дворі доменного цеху і закриті зверху спеціальними кришками. Для їх переміщення використовують спеціальні вантажопідйомні засоби різних конструкцій. Відомий кран - маніпулятор, який містить поворотну платформу з гідромеханічним механізмом повороту, що встановлена на стаціонарну опорну раму і забезпечена шарнірнозчленованою стрілою з рукояттю і вантажозахоплювальним органом, наприклад у вигляді гака, вилок або грейфера. Як рушії для переміщення стріли і вантажозахоплювального органу застосовані гідроциліндри. Кран - маніпулятор забезпечує виконання широкого кола операцій з переміщення різних вантажів, наприклад довгомірних предметів в зоні роботи технологічного устаткування, і може обслуговувати декілька агрегатів, (див. наприклад, АС СРСР № 557047 "Кран - маніпулятор", МПК В66С 23/42). До недоліків відомого крана - маніпулятора можна віднести досить великі габаритні розміри шарнірно - зчленованої стріли, а також складність конструкції крана - маніпулятора та високі експлуатаційні витрати на його обслуговування. Відомий також маніпулятор, що містить стаціонарну опорну раму, на якій встановлена переміщувана у вертикальній площині підйомна неповоротна колона, що оснащена гідроциліндром підйому колони. Маніпулятор також містить поворотну колону з телескопічною стрілою, забезпеченою вантажозахоплювальним органом у вигляді гака. Поворотна колона приєднана до підйомної колони за допомогою двох вертикальних шарнірів. Висунення телескопічної стріли здійснюється за допомогою гідроциліндра. Маніпулятор оснащений поліспастною системою повороту поворотної колони із стрілою і має досить компактні розміри. Це дозволяє плавно, без розгойдування, переміщувати вантажі, та обслуговувати різне металообробне та технологічне обладнання (див. наприклад патент України № 45209 "Поліспастна система повороту стріли", МПК В66С 9/12). До недоліків вищеназваного маніпулятора можна віднести недостатню точність позиціонування вантажозахоплювального органу - гака в місцях завантаження - розвантаження вантажу, що обумовлене недостатньою жорсткістю поліспастного механізму повороту. У випадку використання вищезгаданого маніпулятора для захоплення і переміщення кришок розливних жолобів це може призвести до виникнення аварійної ситуації. Відомий також маніпулятор для кришок розливних жолобів, що містить встановлену на стаціонарній опорі поворотну платформу з стрілою, оснащеною гідроциліндром підйому стріли. На кінцевій ділянці стріли вільно закріплений вантажозахоплювальний орган у вигляді двох гаків, що з'єднані верхніми кінцевими ділянками з гідроциліндром повороту гаків. Маніпулятор забезпечений окремо розташованим механізмом повороту, що кінематично зв'язаний з поворотною платформою. З'єднання гідросистеми поворотної платформи маніпулятора з гідросистемою нерухомої стаціонарної опори виконано за допомогою гнучких гідравлічних рукавів високого тиску. Маніпулятор забезпечує захоплення гаками кришок розливних жолобів, їх підйом на потрібну висоту та переміщення на відповідну площадку, та повернення їх в початкове положення, (див. наприклад заявку на винахід № 2013159077, МПК С21В 7/14). Відомий маніпулятор за наявністю істотних ознак є найбільш близьким до заявленої корисної моделі і може бути прийнятий як найближчий аналог (прототипу). Головним недоліком найближчого аналога є навантаження гнучких гідравлічних рукавів високого тиску, що сполучають розташовані на поворотній платформі гідроциліндр підйому стріли та гідроциліндр переміщення вантажозахоплювального органу, з гідросистемою та гідростанцією, що розміщені на нерухомій опорній рамі, додатковими скручуючими моментами, що виникають під час повороту поворотної платформи відносно опорної рами. Це значно скорочує термін їх служби і може привести до їх передчасного розриву та виникнення аварійної ситуації. Іншим істотним недоліком найближчого аналога є складність конструкції механізму повороту маніпулятора. Заявлений механізм повороту має в своєму складі багато елементів, а саме: кінематично зв'язані між собою консоль вилки, кронштейн, двоплечий важіль і шток гідроциліндра, що істотно зменшує його надійність та підвищує вартість виготовлення і експлуатації. В основу корисної моделі поставлено задачу підвищити надійність роботи і безпеку експлуатації маніпулятора кришок розливних жолобів шляхом оснащення його пристроєм передачі потоку гідравлічної рідини від нерухомої частини до рухомої, і за рахунок технічного 1 UA 100280 U 5 10 15 20 25 30 35 40 45 50 55 результату, що полягає в усуненні дії крутних навантажень на гнучкі елементи гідросистеми маніпулятора, а саме рукави високого тиску. Поставлена задача вирішується за рахунок того, що у маніпуляторі кришок розливних жолобів, що містить стаціонарну опорну раму з вертикальною колоною, поворотну платформу з механізмом повороту, стрілою з вантажозахоплювальним органом, гідроциліндром підйому стріли і гідроциліндром повороту вантажозахоплювального органу та встановлена на вертикальній колоні, гідросистему з гідростанцією, маніпулятор додатково оснащений пристроєм передачі потоку гідравлічної рідини високого тиску від опорної рами до поворотної платформи у вигляді гідравлічного вертлюга, нерухома частина якого встановлена на верхній торцевій поверхні вертикальної колони, рухома частина закріплена до поворотної платформи та сполучена гнучкими гідравлічними магістралями високого тиску з гідроциліндром підйому стріли та гідроциліндром переміщення вантажозахоплювального органу відповідно, крім того у вертикальній колоні додатково виконані крізні отвори, що паралельні до осі колони та сполучають відповідні отвори нерухомої частини гідравлічного вертлюга з гідравлічними магістралями гідростанції, а вантажозахоплювальний орган виконаний у вигляді рухомої траверси, закріпленої в отворах верхньої частини стріли за допомогою осей та сполученої з гідроциліндром горизонтального переміщення вантажозахоплювального органу і оснащеної двома гаками, розміщеними по кінцях нижньої поверхні рухомої траверси, при цьому профіль зіву кожного гака виконаний за умов забезпечення вільного захоплення вушок кришки жолоба. Причинно-наслідковий зв'язок між сукупністю ознак, що заявляються, та технічним результатом існує. Тільки завдяки тому, що маніпулятор кришок розливних жолобів додатково оснащений пристроєм передачі потоку гідравлічної рідини від стаціонарної опорної рами до поворотної платформи, що виконане у вигляді вертлюга, встановленого нерухомою частиною на верхній торцевій поверхні вертикальної колони, а рухома частина вертлюга закріплена на поворотній платформі та сполучена за допомогою рукавів високого тиску із штоковими та поршневими порожнинами гідроциліндра підйому стріли і гідроциліндра переміщення вантажозахоплювального органу відповідно, крім того на верхній торцевій поверхні вертикальної колони додатково виконані крізні отвори, що паралельні подовжній осі колони і сполучають відповідні отвори нерухомої частини вертлюга з рукавами високого тиску гідросистеми, усунена дія скручуючих навантажень на рукави високого тиску, підвищені безпека, надійність і ефективність роботи маніпулятора. Заявлений технічний результат не можливо отримати, якщо із приведеної сукупності істотних ознак виключити будь-яку. Додатковий корисний результат, що полягає в зменшенні вартості виготовлення і експлуатації маніпулятора кришок розливних жолобів отримано за рахунок того, що механізм повороту маніпулятора розміщений усередині опорної рами та виконаний у вигляді зубчасторейкової передачі, при цьому вінцеве зубчасте колесо жорстко закріплене на нижній частині поворотної платформи, а зубчаста рейка - на опорній рамі та приводиться до руху за допомогою гідроциліндрів, що встановлені співвісно до вищезгаданої рейки та взаємодіють своїми штоками з її кінцями. Корисна модель пояснюється кресленнями, де на фіг. 1 показаний загальний вигляд маніпулятора, на фіг. 2 - переріз А-А, на фіг. 3 - переріз Б-Б, на фіг. 4 - місце Г. Маніпулятор кришок розливних жолобів (див. фіг. 1 і 2) складається із нерухомої опорної рами 1 і поворотної платформи 2. На поворотній платформі 2 розміщені стріла 3 з гідроциліндром підйому стріли 4. На кінці стріли 3 встановлений вантажозахоплювальний орган 5 та гідроциліндр повороту вантажозахоплювального органу 6. Обертання поворотної платформи 2 виконується механізмом повороту маніпулятора 7. На опорній рамі 1 встановлена вертикальна колона 8. На вертикальній колоні 8 за допомогою вальницевих вузлів встановлена поворотна платформа 2. Відмітними особливостями заявленої корисної моделі є (див. фіг. 2, 3 i 4): Пристрій передачі потоку гідравлічної рідини від опорної рами 1 (нерухомої частини) до поворотної платформи 2 (рухомої частини), що виконаний у вигляді гідравлічного вертлюга 9; нерухома частина 10 гідравлічного вертлюга 9 встановлена на верхній торцевій поверхні вертикальної колони 8; рухома частина 11 гідравлічного вертлюга 9 закріплена до поворотної платформи 2 та сполучена за допомогою гідравлічних рукавів високого тиску 12 і 13 з робочими порожнинами гідроциліндра підйому стріли 4, а за допомогою гідравлічних рукавів високого тиску 14 і 15 - з робочими порожнинами гідроциліндра повороту 6 вантажозахоплювального органу 5; 2 UA 100280 U 5 10 15 20 25 30 35 40 45 50 55 у вертикальній колоні 8 виконані крізні отвори 16. Кожен отвір 16 сполучає відповідно гнучкі рукави високого тиску 17, 18, 19 і 20, що подають оливу від гідростанції (на фіг. умовно не показана), що встановлена на опорній рамі 1, до нерухомої частини 10 гідравлічного вертлюга 9, яка встановлена торцевій поверхні вертикальної колони 8, а кількість отворів 16 дорівнює кількості вищезгаданих гідравлічних рукавів. Далі потік оливи передається через рухому частину 11 гідравлічного ветрлюга 9 та гідравлічні рукави високого тиску 12, 13, 14 і 15 до гідроциліндрів 4 і 6 відповідно; вантажозахоплювальний орган 5 виконаний у вигляді закріпленої в отворах верхньої частини стріли 3 за допомогою осей 21 рухомої траверси 22, сполученої з гідроциліндром повороту вантажозахоплювального органу 6 та оснащеної двома гаками 23, жорстко закріпленими по кінцях рухомої траверси 22, при цьому профіль зіву кожного гака 23 виконаний за умов забезпечення вільного захоплення вушок 24 кришки жолоба. рушій повороту маніпулятора 7 змонтований усередині опорної рами 1 і виконаний у вигляді редуктора та зубчасто-рейкової передачі, при цьому зубчаста рейка 25 приводиться до руху за допомогою гідроциліндрів 26 і 27, що встановлені співвісно до вищезгаданої рейки 25 та взаємодіють своїми штоками з її кінцями, а зубчасте колесо 28 зубчасто-рейкової передачі встановлено на вхідному валу редуктора. Вихідний вал редуктора оснащений зубчатим колесом, та знаходиться в зачеплені із зубчатим вінцем, встановленим на нижній частині поворотної платформи 2. Працює заявлена корисна модель наступним чином. Під час випускання рідкого чавуну з доменної печі у разі потреби розкриття розливного жолоба виконують підйом відповідної кришки за допомогою маніпулятора кришок розливних жолобів. Для цього, поворотну платформу 2 маніпулятора за допомогою механізму повороту маніпулятора 7 повертають до відповідної кришки, подаючи оливу за допомогою гнучких рукавів високого тиску у поршневу порожнину відповідного гідроциліндру, наприклад 26. Під дією високого тиску шток поршня 26 переміщується і штовхає зубчасту рейку 25. Зубчаста рейка 25 переміщується і відповідно повертає зубчасте колесо 28 зубчато-рейкової передачі. Далі крутний момент від зубчатого колеса 28 через редуктор та зубчате колесо вихідного вала редуктора передається до зубчатого вінця поворотної платформи 2 і повертає її. За допомогою гідроциліндра підйому стріли 4 опускають стрілу 3 у нижнє положення. Для чого подають оливупід високим тиском від гідростанції через гнучкий рукав 17, відповідний отвір 16 вертикальної колони 8, відповідний отвір у нерухомій частині 10 гідравлічного вертлюга 9, кільцеву порожнину та отвір у поворотній частині 11 гідравлічного вертлюга 9, через гнучкий рукав високого тиску 12 в штокову порожнину гідроциліндра підйому стріли 4. Захоплення вушок кришки розливного жолоба вантажозахватним органом 5 виконують, переміщуючи траверсу 22 з гаками 23 у вертикальній площині за допомогою гідроциліндра повороту вантажозахоплювального органу 6. Для цього подають оливу під високим тиском від гідростанції через гнучкий рукав 19, відповідний отвір 16 вертикальної колони 8, відповідний отвір у нерухомій частині 10 гідравлічного вертлюга 9, відповідні кільцеву порожнину та отвір у поворотній частині 11 гідравлічного вертлюга 9, через гнучкий рукав високого тиску 14 в поршневу порожнину гідроциліндра 6. Підйом стріли 3 з кришкою за допомогою гідроциліндра підйому стріли 4 та повертання маніпулятора за допомогою механізму повороту маніпулятора 7 у потрібне місце виконуют, подаючи оливу від гідростанції до гідроциліндрів 4 і 27 через відповідні гнучкі рукави та гідравлічний вертлюг аналогічно вищевказаному. Для закриття розливного жолоба виконують всі вище перелічені операції у зворотній послідовності. Таким чином, виконання маніпулятора кришок розливних жолобів для рідкого чавуну доменної печі у відповідності до заявленої корисної моделі забезпечило підвищення надійності, безпеки і ефективність роботи маніпулятора кришок розливних жолобів, за рахунок усунення скручуючих навантажень гнучких рукавів високого тиску, що з'єднують гідравлічну станцію, встановлену на нерухомій рамі та гідроциліндри підйому стріли та переміщення вантажозахоплювального органу. Скорочення часу захоплення вантажозахоплювальним органом маніпулятора вушок кришок жолобів досягнуто за рахунок виконання вантажозахоплювального органу у вигляді траверси з гаками, та виконання профілю зіву кожного гака за умов забезпечення вільного захоплення вищезгаданих вушок. 3 UA 100280 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 1. Маніпулятор кришок розливних жолобів, що містить опорну раму з вертикальною колоною, встановлену на вертикальній колоні поворотну платформу з механізмом повороту, стрілою з вантажозахоплювальним органом, гідроциліндром підйому стріли і гідроциліндром повороту вантажозахоплювального органу, гідросистему з гідростанцією, який відрізняється тим, що маніпулятор додатково оснащений пристроєм передачі потоку гідравлічної рідини високого тиску від опорної рами до поворотної платформи у вигляді гідравлічного вертлюга, нерухома частина якого встановлена на верхній торцевій поверхні вертикальної колони, а рухома частина закріплена до поворотної платформи та сполучена за допомогою гнучких гідравлічних магістралей з гідроциліндром підйому стріли та гідроциліндром повороту вантажозахоплювального органу відповідно, крім того у вертикальній колоні додатково виконані крізні отвори, що паралельні до осі колони та з’єднують відповідні отвори нерухомої частини гідравлічного вертлюга з гідравлічними магістралями гідростанції, а вантажозахоплювальний орган виконаний у вигляді рухомої траверси, закріпленої в отворах верхньої частини стріли за допомогою осей і оснащеної гаками, розміщеними по кінцях нижньої поверхні траверси, при цьому, профіль зіву кожного гака забезпечує вільне захоплення вушок кришки жолоба. 2. Маніпулятор кришок розливних жолобів за п. 1, який відрізняється тим, що механізм повороту маніпулятора розміщений усередині опорної рами та виконаний у вигляді зубчасторейкової передачі, при цьому зубчасте колесо змонтоване на нижній поверхні поворотної платформи, а рейка - на опорній рамі та приводиться до руху за допомогою гідроциліндрів, встановлених співвісно до рейки та взаємодіючих штоками з її кінцями. 4 UA 100280 U 5 UA 100280 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюVoloshyn Oleksii Ivanovych, Mykhailov Mykola Oleksiiovych, Dzerzhynskyi Vitalii Oleksandrovych, Yerin Vadym Valeriiovych, Zalevskyi Kostiantyn Eduardovych, Udovenko Serhii Oleksandrovych
Автори російськоюВолошин Алексей Иванович, Михайлов Николай Алексеевич, Дзержинский Виталий Александрович, Ерин Вадим Валерьевич, Залевский Константин Эдуардович, Удовенко Сергей Александрович
МПК / Мітки
МПК: C21B 7/14
Мітки: кришок, жолобів, розливних, маніпулятор
Код посилання
<a href="https://ua.patents.su/8-100280-manipulyator-krishok-rozlivnikh-zholobiv.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор кришок розливних жолобів</a>
Маніпулятор для кришок розливних жолобів
Номер патенту: 108154
Опубліковано: 25.03.2015
Автори: Роєнко Максим Миколайович, Полішкевич Денис Васильович, Савченко Олександр Григорович
МПК: F27D 3/14, B66C 23/00, C21B 7/14, B66F 9/12
Мітки: жолобів, кришок, розливних, маніпулятор
Формула / Реферат:
1. Маніпулятор для кришок жолобів, що включає опору, розташовану з боку від розливного жолоба, на якій встановлений механізм його повороту, стрілу, закріплену на механізмі повороту і зв'язану з гідроциліндром переміщення її кінцевої ділянки у вертикальній площині, крюки, встановлені на кінцевій ділянці стріли на горизонтальній осі і зв'язані з гідроциліндром їх повороту для захвату вушок на кришці жолоба, який відрізняється тим, що механізм...
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Москаленко Олександр Володимирович, Вігдергауз Леонід Павлович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Маніпулятор для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами
Номер патенту: 9562
Опубліковано: 17.10.2005
Автори: Кондратенко Віктор Васильович, Бланар Олег Володимирович, Рафалович Михайло Григорович
МПК: G21F 5/00
Мітки: маніпулятор, контейнерів, радіоактивними, первинних, кришок, відкриття, відходами, закриття
Формула / Реферат:
1. Маніпулятор для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами, що містить механізм піднімання і опускання, захват кришки первинного контейнера, гайковерт для фіксації кришки на первинному контейнері, який відрізняється тим, що пальці жорстко з'єднані з планшайбою посаджені в отвори .рухомої плити з зазором.2. Маніпулятор за п. 1, який відрізняється тим, що планшайба з патроном установлені в обичайці з...
Пересувний електрогідравлічний маніпулятор-навантажувач
Номер патенту: 34082
Опубліковано: 25.07.2008
Автор: Остапович Василь Васильович
МПК: B66F 9/00
Мітки: маніпулятор-навантажувач, пересувний, електрогідравлічний
Формула / Реферат:
Пересувний електрогідравлічний маніпулятор-навантажувач, що включає опорно-поворотний пристрій з висувними опорами/аутригерами, основну і додаткову стріли, гідросистему з виконавчими гідроциліндрами, гідророзподільниками, ротатором і знімні робочі органи, який відрізняється тим, що маніпулятор-навантажувач виконаний знімним з можливістю установки на пересувну платформу і/або навісну систему трактора і з можливістю приєднання до робочого...
Маніпуляційний пристрій для елементів розливних жолобів
Номер патенту: 88235
Опубліковано: 25.09.2009
Автори: Горза Роберт, Таугербек Ральф, Кройц Ганс-Отто
Мітки: пристрій, елементів, розливних, жолобів, маніпуляційний
Формула / Реферат:
1. Маніпуляційний пристрій (10) для елементів розливних жолобів шахтної печі, особливо, для кришок жолобів (70, 70'), що включає в себе несучу основу (12), розташовану збоку від вищевказаного розливного жолоба, раму (14), що підтримується вищевказаною несучою основою (12) і з'єднана з нею за допомогою підшипника (38), що визначає собою першу вісь обертання (А), розташовану по суті вертикально, причому вищевказана рама (14) установлена з...
Попередній патент: Пристрій перетворення кодів
Наступний патент: Спосіб визначення міграції сульфатів добрив у ґрунті
Випадковий патент: Застосування аміксину для профілактики неонатальних інфекційних захворювань молодняку тварин