Спосіб роздільного керування випрямлячем

Формула / Реферат
Спосіб роздільного керування випрямлячем, виконаним із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, що містять анодну й катодну групи і з'єднані із блоком імпульсно-фазового керування, а також з логічним перемикаючим пристроєм і датчиками, при якому включення тиристорів випрямного моста виконують вузькими здвоєними керуючими імпульсами, формованими в блоці імпульсно-фазового керування, датчиками контролюють замкнений стан тиристорів кожного моста, при необхідності реверсу струму за допомогою логічного перемикаючого пристрою відключають включений випрямний міст при запиранні тиристорів хоча б в одній із груп - анодній або катодній - випрямного моста, виконують затримку, після якої включають міст протилежного напрямку провідності при запиранні всіх тиристорів анодної і катодної груп, який відрізняється тим, що після надходження завдання на реверс струму блокують надходження підтверджуючого імпульсу, формованого в блоці імпульсно-фазового керування, на тиристори включеного випрямного моста, здійснюють установку кутів керування в область максимальних значень, відключають включений випрямний міст при запиранні всіх тиристорів хоча би в одній із груп - анодній або катодній, блокують подачу всіх керуючих імпульсів на тиристори включеного випрямного моста, виконують затримку, під час якої встановлюють значення кутів керування, що забезпечують перехідний процес реверсу струму, і після запирання всіх тиристорів анодної й катодної груп дозволяють подачу всіх керуючих імпульсів, як основних, так і підтверджуючих, на тиристори моста протилежного напрямку провідності.
Текст
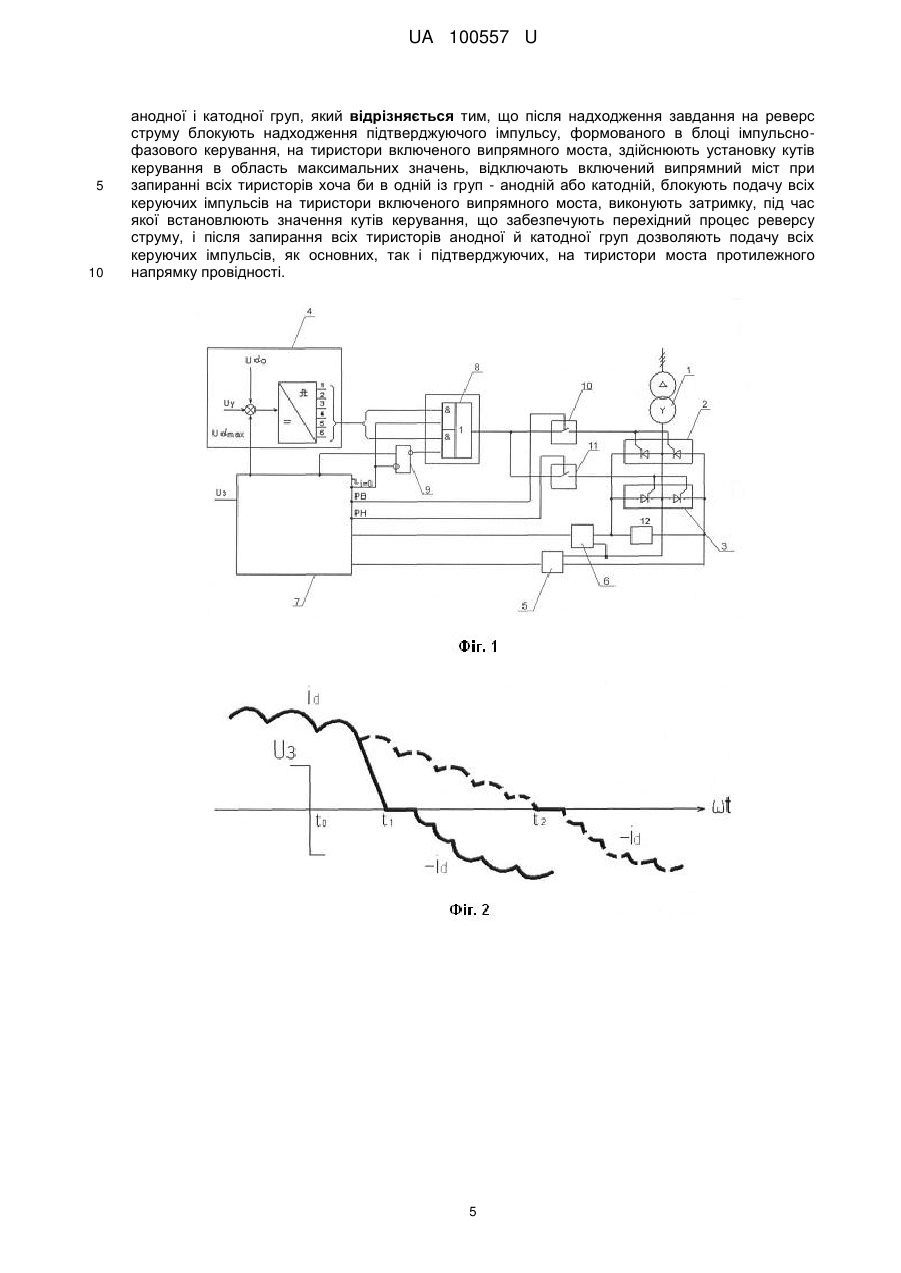
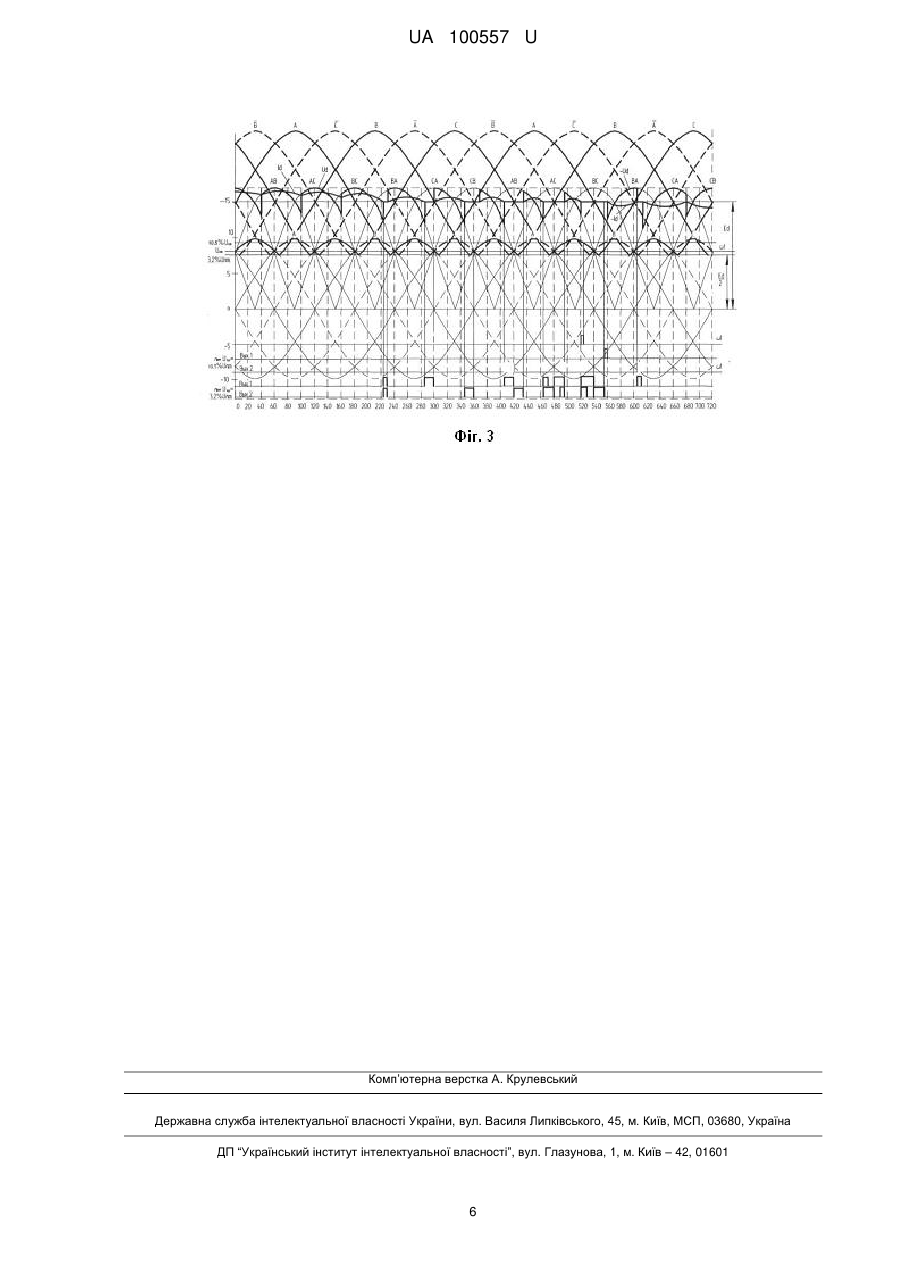
Реферат: Спосіб роздільного керування випрямлячем, виконаним із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, що містять анодну й катодну групи і з'єднані із блоком імпульсно-фазового керування, а також з логічним перемикаючим пристроєм і датчиками, при якому включення тиристорів випрямного моста виконують вузькими здвоєними керуючими імпульсами, формованими в блоці імпульсно-фазового керування. Після надходження завдання на реверс струму блокують надходження підтверджуючого імпульсу, формованого в блоці імпульсно-фазового керування, на тиристори включеного випрямного моста. Здійснюють установку кутів керування в область максимальних значень, відключають включений випрямний міст при запиранні всіх тиристорів хоча би в одній із груп - анодній або катодній. Блокують подачу всіх керуючих імпульсів на тиристори включеного випрямного моста, виконують затримку, під час якої встановлюють значення кутів керування, що забезпечують перехідний процес реверсу струму. UA 100557 U (54) СПОСІБ РОЗДІЛЬНОГО КЕРУВАННЯ ВИПРЯМЛЯЧЕМ UA 100557 U UA 100557 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до електротехніки, а саме до силової перетворювальної техніки, і може бути використаний в реверсивних тиристорних випрямлячах. Найбільш близьким за технічною суттю і результатом, що досягається, до технічного рішення, що заявляється, є спосіб роздільного керування випрямлячем, виконаним із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, який наведено в описі до пристрою (див. авт. свідоцтво СРСР № 1169505 заявка № 2943314, від 23.06.80, опубліковано 07.02.1986, МПК Н02Р 13/16). У відомому способі роздільного керування випрямлячем, виконаним із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, що містять анодну й катодну групи і з'єднані із блоком імпульсно-фазового керування, а також з логічним перемикаючим пристроєм і датчиками, при якому включення тиристорів випрямного моста виконують вузькими здвоєними керуючими імпульсами, формованими в блоці імпульснофазового керування, датчиками контролюють замкнений стан тиристорів кожного моста, при необхідності реверса струму за допомогою логічного перемикаючого пристрою відключають включений випрямний міст при запиранні тиристорів хоча б в одній із груп - анодній або катодній випрямного моста, виконують затримку, після якої включають міст протилежного напрямку провідності при запиранні всіх тиристорів анодної й катодної групи. Недоліком відомого способу роздільного керування випрямлячем, виконаним із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, є недостатньо висока його швидкодія. Це обумовлено великою затримкою в формуванні сигналу на відключення моста, який включений, при відсутності струму навантаження. Пояснюється це, по-перше, принципом дії застосованих датчиків контролю замкненого стану тиристорів кожного моста, по-друге, властивостями самих тиристорів, а саме - наявністю струму витоку тиристорів. При цьому значення струму витоку для одного типу тиристора має значну розбіжку і може перевищувати струм критичного утримання тиристора у відкритому стані. Значення струму витоку зростає, якщо паралельно до тиристорів підключені допоміжні елементи, наприклад R-C, а також у випрямлячах великої потужності при паралельному з'єднанні тиристорів в одному плечі випрямного моста. При цьому після відключення моста, який включений, після зникнення струму в навантаженні тиристор в одному плечі цього моста, який останнім був відкритий, і струм витоку якого має значення, менше, ніж критичний струм, замикається, а тиристор в другому плечі може якийсь час утримуватися у відкритому стані, якщо в ньому струм витоку перевищує значення критичного струму. Час утримання у відкритому стані такого тиристора залежить від значення ЕДС навантаження та режиму роботи самого випрямляча, і може досягати 10 мс. Це обумовлює необхідність виконувати більшу затримку на включення моста протилежного напрямку провідності. Принцип дії застосованих датчиків контролю замкненого стану тиристорів заснований на одночасному вимірі напруги на тиристорах контролюючої групи тиристорного моста. Коли хоча б один із тиристорів будь-якої групи буде відкритий, то на ньому буде низьке значення падіння напруги Uп . При цьому на виході датчика не буде формуватися сигнал на відключення моста. А якщо всі тиристори контролюючої групи будуть одночасно вимкнені, то на всіх плечах цієї групи буде значно більша напруга, ніж напруга на відкритому тиристорі (за винятком часу переходу через нуль фазної напруги). В цьому разі на виході датчика сформується сигнал на відключення моста, який включений. При замкнутому стані тиристорів випрямного моста із контрольованих пліч тиристорів анодної та катодної групи на вхід датчиків подається напруга Uпл при наявності в навантаженні ЕДС, що дорівнює: E Uпл U , 2 де U - фазна напруга живлення тиристорного моста, E - ЕДС навантаження, "" - прихильність ЕДС до анодної та катодної групи. Для забезпечення перешкодостійкості та підвищення надійності випрямляча при реверсі струму напругу порогу спрацьовування датчика - Uсп , при якій на його виході може сформуватися сингал на відключення включеного моста, необхідно вибирати більше, ніж найбільша напруга на плечі відкритих тиристорів Uп , тобто Uсп Uп . Однак напруга на відкритому плечі Uп може бути досить великою за рахунок падіння її не тільки на тиристорі, але і на ошиновці плеча, на індуктивності ошиновки та анодних дільниках під час комутації максимального значення струму, що протікає через тиристори. У випрямлячах 1 UA 100557 U великої потужності при паралельно з'єднаних тиристорах в плечі та застосуванні анодних дільників значення падіння напруги Uп на відкритому плечі може досягати 10-12 % Uл max . Але, 5 чим більше установлене значення напруги порога спрацьовування Uсп датчика, тим більший час затримки Т з у формуванні на його виході сигналу на відключення включеного моста. Ця затримка найбільша при максимальному значенні ЕДС навантаження, бо в цій зоні повільніше змінюється значення фазної напруги. При цьому максимальне значення ЕДС дорівнює Ed m 0,955 Uл max , а час затримки при установленому порозі напруги спрацьовування датчика Uсп дорівнює I 1 E dm 1 Edm arcSin Uсп arcSin Uсп , де Ua 2 Ua 2 - час затримки, Т з max 10 15 20 25 30 35 40 45 50 Т з max Uсп. - установлене значення напруги порога спрацьовування датчика, Ua - фазна амплітудна напруга живлення, - колова частота напруги живлення випрямляча. Таким чином, при відсутності струму в навантаженні відключення моста, який включений, не відбувається, і на його тиристори продовжують подаватися здвоєні керуючі імпульси до того часу, поки модуль напруги на плечах анодної або катодної групи одночасно не стане більше за напругу порога спрацьовування Uсп датчиків (Дивись наведену діаграму на фіг. 2 при установленому Uсп 10,5% Uл max , Uсп2 3,2% Uл max . Затримка часу відключення включеного моста при відсутності струму навантаження і наявності завдання на зміну напрямку провідності обумовлює не тільки зниження швидкодії випрямляча, але й викликає нестійку його роботу в режимі переривчастого струму, якщо випрямляч встановлений в системі автоматичного керування. Завдяки цьому, недоліком відомого способу роздільного керування випрямлячем, виконаним із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, є недостатньо висока його швидкодія В основу корисної моделі поставлена задача удосконалення способу роздільного керування випрямлячем, виконаним із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, у якому шляхом введення нових операцій, нової їх послідовності, та нових режимів їх виконання забезпечується розширення функціональних можливостей за рахунок збільшення швидкодії при реверсі струму навантаження. Поставлена задача вирішується тим, що у відомому способі, роздільного керування випрямлячем, виконаним із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, що містять анодну й катодну групи і з'єднані із блоком імпульсно-фазового керування, а також з логічним перемикаючим пристроєм і датчиками, при якому включення тиристорів випрямного моста виконують вузькими здвоєними керуючими імпульсами, формованими в блоці імпульснофазового керування, датчиками контролюють замкнений стан тиристорів кожного моста, при необхідності реверсу струму за допомогою логічного перемикаючого пристрою відключають включений випрямний міст при запиранні тиристорів хоча б в одній із груп - анодній або катодній - випрямного моста, виконують затримку, після якої включають міст протилежного напрямку провідності при запиранні всіх тиристорів анодної й катодної груп, згідно з корисною моделлю, що після надходження завдання на реверс струму блокують надходження підтверджуючого імпульсу, формованого в блоці імпульсно-фазового керування, на тиристори включеного випрямного моста, здійснюють установку кутів керування в область максимальних значень, відключають працюючий міст при запиранні всіх тиристорів хоча би в одній із груп - анодній або катодній, блокують подачу всіх керуючих імпульсів на тиристори включеного випрямного моста, виконують затримку, під час якої встановлюють значення кутів керування, що забезпечують перехідний процес реверсу струму, і після запирання всіх тиристорів анодної й катодної груп дозволяють подачу всіх керуючих імпульсів, як основних, так і підтверджуючих, на тиристори моста протилежного напрямку провідності. Причинно-наслідковий зв'язок між сукупністю суттєвих ознак способу роздільного керування випрямлячем, виконаним із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, що заявляється, і технічним результатом, що досягається, полягає в тому, що спосіб роздільного керування випрямлячем, який заявляється, а саме те, 2 UA 100557 U 5 10 15 20 25 30 35 40 45 50 55 що після надходження завдання на реверс струму блокують надходження підтверджуючого імпульсу, формованого в блоці імпульсно-фазового керування, на тиристори включеного випрямного моста, здійснюють установку кутів керування в область максимальних значень, відключають включений випрямний міст при запиранні всіх тиристорів хоча би в одній із груп - анодній або катодній, блокують подачу всіх керуючих імпульсів на тиристори включеного випрямного моста, виконують затримку, під час якої встановлюють значення кутів керування, що забезпечують перехідний процес реверса струму, і після запирання всіх тиристорів анодної й катодної груп дозволяють подачу всіх керуючих імпульсів, як основних, так і підтверджуючих, на тиристори моста протилежного напрямку провідності, у сукупності з відомими ознаками забезпечує розширення функціональних можливостей за рахунок збільшення швидкодії при реверсі струму навантаження. Це пояснюється наведеним нижче прикладом реалізації способу, який заявляється, Спосіб роздільного керування випрямлячем, виконаним із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, що заявляється, представлений кресленнями, де зображені: на фіг. 1 наведена структурна схема реверсивного випрямляча, на прикладі якого пояснюється спосіб роздільного керування, який заявляється; на фіг. 2 наведена діаграма напруг на анодній (суцільна лінія) і катодній (переривчаста лінія) групах тиристорного моста при роботі випрямляча на навантаження, що містить ЕДС; на фіг. 3 наведена діаграма процесу спадання та реверсу струму при способі керування, який заявляється, Випрямляч, виконаний із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, так званий реверсивний випрямляч, містить силовий живильний трансформатор 1, тиристорні випрямні мости 2 й 3, відповідно, зібрані по протипаралельній схемі, блок 4 системи імпульсно-фазового керування (СІФК), що формує шестиканальну послідовність здвоєних керуючих імпульсів, датчики 5 й 6, відповідно, замкненого стану всіх тиристорів анодної й катодної груп. Входи датчиків 5 і 6 з'єднані з тиристорними мостами 2, 3, а виходи - із входами логічного перемикаючого пристрою 7 (ЛПП), вхід якого з'єднаний з ланцюгом задання напрямку провідності випрямляча - Uз . Реверсивний випрямляч містить також вузол 8 мікросхем, який може бути, наприклад, типу КС561ЛС2. Вузол 8 мікросхем такого типу містить в одному каналі два логічних елементи "ТА" и один "АБО", при цьому перші входи першого елемента "ТА" з'єднані з виходами блока 4 системи імпульсно-фазового керування (СІФК), які формують основні керуючі імпульси із заданим кутом керування, а перші входи другого елемента "ТА" з'єднані з виходами блока 4 системи імпульсно-фазового керування (СІФК), які формують підтверджуючі керуючі імпульси, що відстоять від основних на 60 електричних градусів. Реверсивний випрямляч містить також логічний елемент 9 "АБО-НІ". Вихід елемента "АБО" вузла 8 мікросхем з'єднаний через ключі 10 й 11 гасіння з керуючими переходами тиристорів відповідних тиристорних мостів 2 й 3. Перший вхід логічного елемента 9 "АБО-НІ", з'єднаний з другим виходом логічного перемикаючого пристрою 7, що формує сигнал на зняття підтверджуючих імпульсів, а другий інверторний вхід логічного елемента 9 "АБО-НІ" і другий вхід першого елемента "ТА" вузла 8 мікросхем з'єднаний з третім виходом логічного перемикаючого пристрою 7, на якому формується логічний сигнал - «1» під час затримки в перемиканні ключів 10 й 11 гасіння, вихід логічного елемента 9 "АБО-НІ" з'єднаний із другим входом другого логічного елемента "ТА" вузла 8 мікросхем. Випрямляч включає також навантаження 12, що містить проти ЕДС. Робота пристрою відбувається в таким чином. Керування тиристорним випрямлячем з мостовою схемою випрямлення, підключеним на активне, активно-індуктивне навантаження або навантаження, що містить проти ЕДС, здійснюється, як правило, за допомогою вузьких здвоєних керуючих імпульсів, формованих у блоці 4 системи імпульсно-фазового керування. Якщо в результаті надходження завдання Uз на вхід логічного перемикаючого пристрою 7, здвоєні керуючі імпульси з виходу блока 4 системи імпульсно-фазового керування, вузла 8 мікросхем через відкритий ключ 10 гасіння подається на тиристори випрямного моста 2, то ланцюг навантаження 12 виявляється замкнутим й у ньому буде протікати заданий системою регулювання струм. При цьому на виході датчиків 5 й 6 при безперервному струмі присутні логічні сигнали "0", на першому, другому, третьому, п'ятому виходах логічного перемикаючого пристрою 7 також присутні логічні сигнали "0". 3 UA 100557 U 5 10 15 20 25 30 35 40 45 При надходженні завдання Uз на зміну напрямку струму в навантаженні 12 на першому і другому виходах логічного перемикаючого пристрою 7 формуються сигнали логічної "1", які встановлюють кути керування а у блоці 4 системи імпульсно-фазового керування (СІФК) в область максимальних значень max , а на виході логічного елемента 9 "АБО-НІ" установлюється сигнал логічного "0", що блокує подачу з виходу вузла 8 мікросхем підтверджуючих керуючих імпульсів на тиристорі моста 2, по якому протікає заданий безперервний струм. При збільшенні кутів керування до граничних значень струм у навантаженні спаде до нуля. При цьому при відсутності підтверджуючих вузьких керуючих імпульсів одночасна комутація тиристорів у мостовій випрямній схемі не відбувається і у навантаженні буде відсутній навіть переривчастий струм. У результаті на виході датчиків 5 або 6 з'являється сигнал логічної "1", під дією якого на третьому і четвертому виходах логічного перемикаючого пристрою 7 сформуються сигнали логічного "0", що блокують через ключ 10 і другий вхід першого логічного елемента ТА вузла 8 мікросхем надходження і основні керуючі імпульси на тиристорі тиристорного моста 2. Під час затримки, що утворилася, у перемиканні ключів 10 й 11 гасіння на першому виході логічного перемикаючого пристрою 7 формується сигнал на встановлення значення кутів керування у блоці 4 системи імпульсно-фазового керування (СІФК), що забезпечують якісний перехідний процес реверса струму, і за умови замкненого стану всіх тиристорів анодної й катодної груп на виході датчиків 5 й 6 з'являється логічна "1", на третьому та п'ятому виходах логічного перемикаючого пристрою 7 з'являється логічні сигнали "1", що дозволяють подачу через логічний елемент 9 "АБО-НІ", другий логічний елемент ТА, логічний елемент "АБО" вузла 8 мікросхем і ключ 11 гасіння основних і підтверджуючих імпульсів на керуючі переходи тиристорів моста 3. Надалі, при необхідності зміни напрямку струму в навантаженні, процес відключення моста 3 і включення моста 2 відбувається аналогічно. На фіг. 3 показаний процес спадання та реверса струму при запропонованому способі керування. Процес спадання походить із безперервного струму в моста 2 при надходженні сигналу завдання Uз на вхід логічного перемикаючого пристрою 7 на зміну напрямку провідності струму в навантаженні. Як видно з фіг. 2 час спадання струму та час його реверсування при запропонованому способі (суцільна лінія зміни струму t p t1 t 0 ) буде набагато менше, ніж би воно було при способі аналога (переривчаста лінія зміни струму t p t 2 t 0 ) при завданні із системи автоматичного регулювання, що містить задатчики інтенсивності й пропорційно-інтегральних регуляторів. Час затримки видачі розв'язних сигналів датчиками замкненого стану тиристорів при відсутності підтверджуючих керуючих імпульсів на момент реверса буде значно менше, тому що при цьому відсутня одночасна комутація тиристорів у мостовій випрямній схемі. На фіг. 2 наведена діаграма напруг на анодній (суцільна лінія) і катодній (переривчаста лінія) групах тиристорного моста при роботі випрямляча на навантаження, що містить ЕДС. Як пояснюється діаграмою, вихідні сигнали ДСВ анодної (вихід 1) і катодної (вихід 2) груп при переривчастому струмі в навантаженні з'являються у випадку, коли модуль напруги на плечі анодної групи і катодної групи стане більше за напругу спрацьовування датчиків Uп . На фіг. 3 наведена діаграма процесу спадання та реверса струму при заявленому способі керування. Таким чином загальний час реверса струму в заявленому способі керування менше, ніж у способі, вибраному як прототип. Як показує розрахунок і підтверджує експеримент, заявлений спосіб керування дозволяє скоротити загальний час реверса струму приблизно на 30 %, що дає можливість його ефективно застосовувати у швидкодіючих реверсивних електроприводах постійного струму й збільшити продуктивність технологічних процесів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Спосіб роздільного керування випрямлячем, виконаним із протипаралельним з'єднанням, принаймні двох, тиристорних мостів, що містять анодну й катодну групи і з'єднані із блоком імпульсно-фазового керування, а також з логічним перемикаючим пристроєм і датчиками, при якому включення тиристорів випрямного моста виконують вузькими здвоєними керуючими імпульсами, формованими в блоці імпульсно-фазового керування, датчиками контролюють замкнений стан тиристорів кожного моста, при необхідності реверсу струму за допомогою логічного перемикаючого пристрою відключають включений випрямний міст при запиранні тиристорів хоча б в одній із груп - анодній або катодній - випрямного моста, виконують затримку, після якої включають міст протилежного напрямку провідності при запиранні всіх тиристорів 4 UA 100557 U 5 10 анодної і катодної груп, який відрізняється тим, що після надходження завдання на реверс струму блокують надходження підтверджуючого імпульсу, формованого в блоці імпульснофазового керування, на тиристори включеного випрямного моста, здійснюють установку кутів керування в область максимальних значень, відключають включений випрямний міст при запиранні всіх тиристорів хоча би в одній із груп - анодній або катодній, блокують подачу всіх керуючих імпульсів на тиристори включеного випрямного моста, виконують затримку, під час якої встановлюють значення кутів керування, що забезпечують перехідний процес реверсу струму, і після запирання всіх тиристорів анодної й катодної груп дозволяють подачу всіх керуючих імпульсів, як основних, так і підтверджуючих, на тиристори моста протилежного напрямку провідності. 5 UA 100557 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02P 13/00, H02M 7/00
Мітки: випрямлячем, роздільного, керування, спосіб
Код посилання
<a href="https://ua.patents.su/8-100557-sposib-rozdilnogo-keruvannya-vipryamlyachem.html" target="_blank" rel="follow" title="База патентів України">Спосіб роздільного керування випрямлячем</a>
Спосіб прямого мікропроцесорного керування випрямлячем за обчислювальними прогнозами
Номер патенту: 27549
Опубліковано: 12.11.2007
Автори: Сунанто ..., Домнін Ігор Феліксович, Кіяшко Борис Олександрович, Бахнов Леонід Євгенійович, Іванов Олександр Євгенійович, Сокол Євгеній Іванович, Тимченко Микола Олександрович
МПК: H02M 7/00
Мітки: обчислювальними, прямого, мікропроцесорного, спосіб, керування, прогнозами, випрямлячем
Формула / Реферат:
1. Спосіб керування тиристорним перетворювачем за обчислювальними прогнозами, який полягає у тому, що задають струм навантаження, вимірюють фактичний струм навантаження, вимірюють протиерс навантаження та визначають момент подачі чергових імпульсів керування на тиристори на кожному інтервалі дискретності, який відрізняється тим, що величину струму навантаження, що задається на наступний інтервал провідності, визначають під час комутації на...
Спосіб прогнозуючого керування випрямлячем, навантаженого на двигун, по моделі об’єкту
Номер патенту: 28769
Опубліковано: 25.12.2007
Автори: Сокол Євгеній Іванович, Сунанто ..., Бахнов Леонід Євгенійович, Кіяшко Борис Олександрович, Тимченко Микола Олександрович, Іванов Олександр Євгенійович, Домнін Ігор Феліксович
МПК: G05B 13/04, H02M 7/155, H02P 7/06
Мітки: двигун, прогнозуючого, спосіб, навантаженого, випрямлячем, моделі, керування, об'єкту
Формула / Реферат:
1. Спосіб прогнозуючого керування випрямлячем, навантаженого на двигун, по моделі об'єкта, який полягає у тому, що задають струм навантаження, вимірюють фактичний струм навантаження, вимірюють проти ЕРС навантаження та визначають момент подачі чергових імпульсів керування на тиристори на кожному інтервалі дискретності, який відрізняється тим, що момент подачі імпульсів керування визначається шляхом циклічного розрахунку функціонала на кожному...
Спосіб керування трифазним активним випрямлячем струму
Номер патенту: 45720
Опубліковано: 25.11.2009
Автори: Волков Олександр Васильович, Косенко Ігор Олександрович
МПК: H02P 7/00, H02P 21/00
Мітки: випрямлячем, керування, активним, спосіб, струму, трифазним
Формула / Реферат:
1. Спосіб керування трифазним активним випрямлячем струму, який полягає в тому, що задають необхідне значення вихідного струму активного випрямляча, обчислюють необхідне значення активної проекції і задають необхідне значення реактивної проекції узагальненого вектора мережного струму відповідно на осі абсцис і ординат обертової ортогональної координатної системи, орієнтованої віссю абсцис за узагальненим вектором мережної напруги, контролюють...
Спосіб прямого мікропроцесорного керування тиристорним випрямлячем та пристрій для його здійснення
Номер патенту: 47623
Опубліковано: 15.07.2002
Автори: Кипенський Андрій Володимирович, Сокол Євген Іванович, Голубов Валерій Юрійович, Суботін Юрій Володимирович
МПК: H02M 7/12
Мітки: керування, випрямлячем, тиристорним, мікропроцесорного, пристрій, спосіб, здійснення, прямого
Формула / Реферат:
1. Спосіб прямого мікропроцесорного керування тиристорним випрямлячем, що містить перетворення вихідного числа N, відповідного сигналу керування, за виразомде F(N) - результат перетворювання вихідного числа, одержаний виконанням операції віднімання;Nmax - число (постійна величина), яке при записі у таймер забезпечує формування максимального кута...
Спосіб прямого мікропроцесорного керування тиристорним випрямлячем та пристрій для його здійснення
Номер патенту: 48381
Опубліковано: 15.08.2002
Автори: Сокол Євген Іванович, Суботін Юрій Володимирович, Голубов Валерій Юрійович, Кипенський Андрій Володимирович
МПК: H02M 7/12
Мітки: спосіб, тиристорним, керування, прямого, мікропроцесорного, пристрій, випрямлячем, здійснення
Формула / Реферат:
1. Спосіб прямого мікропроцесорного керування тиристорним випрямлячем, що містить перетворення вихідного числа N, відповідного сигналу керування, за виразомF(N)=Nmax-N,де F(N) - результат перетворювання вихідного числа, одержаний виконанням операції віднімання;Nmax - число (постійна величина), яке при запису в таймер забезпечує формування максимального кута керування;N - вихідне число, відповідне сигналу...
Попередній патент: Спосіб металоостеосинтезу перипротезних переломів стегнової кістки після ендопротезування кульшового суглоба
Наступний патент: Складений торговий стенд
Випадковий патент: Ущільнювач анкера