Пристрій для вимірювання параметрів руху об’єктів
Номер патенту: 103422
Опубліковано: 10.10.2013
Автори: Шаповалова Оксана Олександрівна, Подчашинський Юрій Олександрович
Формула / Реферат
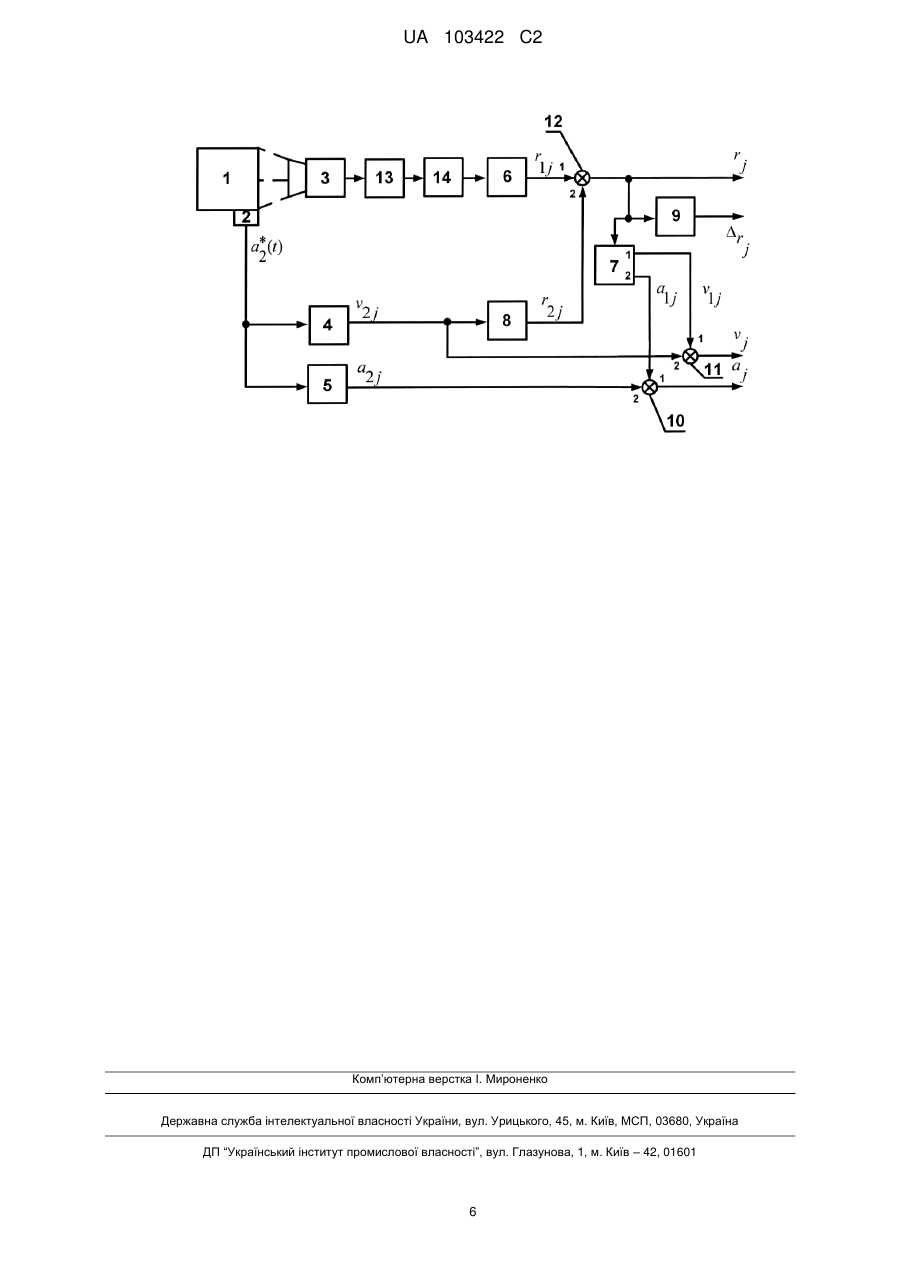
Пристрій для вимірювання параметрів руху об'єктів, що містить пристрій (3) формування відеозображень, вхід якого оптично пов'язаний з об'єктом (1) вимірювань, а вихід підключено до входу аналого-цифрового перетворювача (13), блок (9) обчислення переміщень, перший (12) та другий (11) суматори, який відрізняється тим, що додатково введено акселерометр (2), жорстко закріплений на об'єкті (1) вимірювань, блок (14) пам'яті, блок (6) визначення поточних координат, блок (7) визначення швидкості та прискорення, перший (4) та другий (8) інтегратори, фільтр (5) нижніх частот та третій суматор (10), причому вихід аналогово-цифрового перетворювача (13) підключено до входу блока (14) пам'яті, вихід якого підключено до входу блока (6) визначення поточних координат, вихід якого підключено до першого входу першого суматора (12), вихід якого підключено до входу блока (9) обчислення переміщень та до входу блока (7) визначення швидкості та прискорення, перший вихід якого підключено до першого входу другого суматора (11), а другий вихід підключено до першого входу третього суматора (10), а вихід акселерометра (2) підключено до входу фільтра (5) нижніх частот та до входу першого інтегратора (4), вихід якого підключено до другого входу другого суматора (11) та до входу другого інтегратора (8), вихід якого підключено до другого входу першого суматора (12), а вихід фільтра (5) нижніх частот підключено до другого входу третього суматора (10), а вихід блока (9) обчислення переміщень і виходи першого (12), другого (11) та третього (10) суматорів є виходами всього пристрою.
Текст
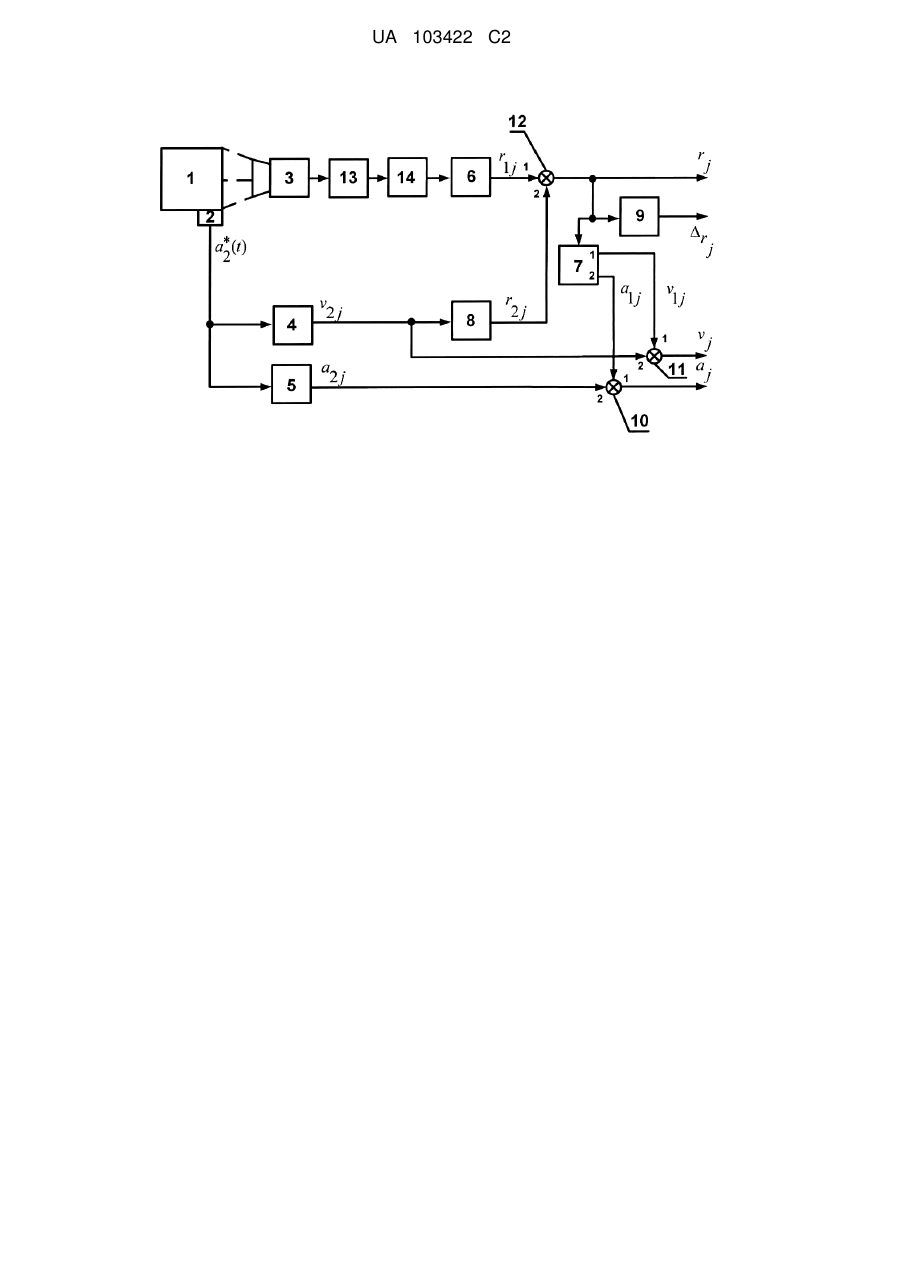
Реферат: Пристрій для вимірювання параметрів руху об'єктів містить пристрій формування відеозображень, вхід якого оптично пов'язаний з об'єктом вимірювань, а вихід підключено до входу аналого-цифрового перетворювача. Пристрій для вимірювання параметрів руху об'єктів також містить блок обчислення переміщень, перший та другий суматори. До складу пристрою додатково введено акселерометр, жорстко закріплений на об'єкті вимірювань, блок пам'яті, блок визначення поточних координат, блок визначення швидкості та прискорення, перший та другий інтегратори, фільтр нижніх частот та третій суматор. Вихід аналогово-цифрового перетворювача підключено до входу блока пам'яті, вихід якого підключено до входу блока визначення поточних координат, вихід якого підключено до першого входу першого суматора, вихід якого підключено до входу блока обчислення переміщень та до входу блока визначення швидкості та прискорення, перший вихід якого підключено до першого входу другого суматора, а другий вихід підключено до першого входу третього суматора. Вихід акселерометра підключено до входу фільтра нижніх частот та до входу першого інтегратора, вихід якого підключено до другого входу другого суматора та до входу другого інтегратора, вихід якого підключено до другого входу першого суматора. Вихід фільтра нижніх частот підключено до другого входу третього суматора. Вихід блока обчислення переміщень і виходи першого, другого та третього суматорів є виходами всього пристрою. UA 103422 C2 (12) UA 103422 C2 UA 103422 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі вимірювальної техніки і може бути використаний для визначення поточних координат, переміщень, швидкості та прискорення промислових виробів та елементів технологічного обладнання на підприємствах. Відомий пристрій для вимірювання параметрів руху об'єктів [1], що вибраний за прототип винаходу. Як і пристрій-винахід, він містить пристрій формування відеозображень, вхід якого оптично пов'язаний з об'єктом вимірювань, а вихід підключено до входу аналого-цифрового перетворювача, блок обчислення переміщень, перший та другий суматори. Проте, на відміну від пристрою-винаходу, у пристрої-прототипі до виходу аналогоцифрового перетворювача послідовно підключено перший та другий блоки затримки, блок віднімання та суматори, що обробляють відеозображення об'єкта вимірювань по рядках. Ця обробка включає компенсацію похибок визначення кординат контурних точок об'єкта вимірювань, обумовлених нестабільністю зовнішнього освітлення цього об'єкта та його рухом відносно пристрою формування відеозображень. При цьому для компенсації похибки, обумовленої нестабільністю зовнішнього освітлення об'єкта вимірювань, використовується максимальне значення амплітуди відеосигналу в одному рядку відеозображення. Але одного цього значення недостатньо для точного визначення поточної яскравості об'єкта вимірювань через наявність шумів у відеосигналі та неоднорідність поверхні об'єкта вимірювань. Через це вказана похибка не може бути повністю скомпенсована. У пристрої-прототипі пристрій формування відеозображень виконано у вигляді телевізійної передавальної трубки. Відеозображення об'єкта вимірювань, отримане у телевізійній передавальній трубці, окрім вказаних похибок, містить ряд інших похибок, що обумовлені процесами формування цього відеозображення та суттєво впливають на точність визначення координат контурних точок та параметрів руху об'єкта вимірювань [2]. У пристрої-прототипі переміщення об'єкта вимірювань визначаються в блоці обчислення переміщень шляхом алгоритмічної обробки координат контурних точок. В результаті цього, вихідний сигнал пристрою-прототипу містить трансформовані похибки [3], обумовлені наявними похибками вимірювання координат. У пристрої-прототипі блок обчислення переміщень безпосередньо визначає тільки поточні координати контурних точок об'єкта вимірювань та переміщення цих точок. Для обчислення інших параметрів руху (наприклад, швидкості та прискорення центра мас об'єкта вимірювань) необхідно застосування додаткових пристроїв або блоків у складі пристрою-прототипу. Таким чином, пристрій-прототип має недостатню точність та обмежені функціональні можливості вимірювання параметрів руху об'єктів. В основу винаходу поставлена задача удосконалення пристрою для вимірювання параметрів руху об'єктів, щоб забезпечити підвищення точності та розширення функціональних можливостей визначення цих параметрів руху. Поставлена задача вирішується шляхом того, що в пристрій для вимірювання параметрів руху об'єктів, що містить пристрій формування відеозображень, вхід якого оптично пов'язаний з об'єктом вимірювань, а вихід підключено до входу аналого-цифрового перетворювача, блок обчислення переміщень, перший та другий суматори, згідно з винаходом, додатково введено акселерометр, жорстко закріплений на об'єкті вимірювань, блок пам'яті, блок визначення поточних координат, блок визначення швидкості та прискорення, перший та другий інтегратори, фільтр нижніх частот та третій суматор, причому вихід аналогово-цифрового перетворювача підключено до входу блока пам'яті, вихід якого підключено до входу блока визначення поточних координат, вихід якого підключено до першого входу першого суматора, вихід якого підключено до входу блока обчислення переміщень та до входу блока визначення швидкості та прискорення, перший вихід якого підключено до першого входу другого суматора, а другий вихід підключено до першого входу третього суматора, а вихід акселерометра підключено до входу фільтра нижніх частот та до входу першого інтегратора, вихід якого підключено до другого входу другого суматора та до входу другого інтегратора, вихід якого підключено до другого входу першого суматора, а вихід фільтра нижніх частот підключено до другого входу третього суматора, а вихід блока обчислення переміщень і виходи першого, другого та третього суматорів є виходами всього пристрою. У пристрої-винаході блок пам'яті забезпечує запам'ятовування масиву цифрових даних, що отриманий від аналого-цифрового перетворювача та відповідає всьому відеозображенню об'єкта вимірювань. Блок визначення координат вимірює координати точок, що належать об'єкту вимірювань. При цьому він компенсує похибку, обумовлену нестабільністю зовнішнього освітлення об'єкта вимірювань, за результатами визначення яскравості для всіх точок об'єкта вимірювань на відеозображенні, отриману від блока пам'яті. Це забезпечує більш повну компенсацію вказаної похибки порівняно з варіантом аналізу яскравості окремих рядків 1 UA 103422 C2 5 10 15 20 25 30 35 40 45 50 55 відеозображення та підвищення точності визначення поточних координат і параметрів руху об'єкта вимірювань. Пристрій-винахід містить акселерометр, що жорстко закріплений на об'єкті вимірювань, та два інтегратори. Така схема пристрою-винаходу забезпечує вимірювання поточних координат об'єкта вимірювань двома незалежними вимірювальними каналами. Перший канал складається з пристрою формування відеозображень, аналого-цифрового перетворювача, блока пам'яті та блока визначення поточних координат і використовує для вимірювань відеозображення об'єкта вимірювань. Другий канал складається з акселерометра та двох інтеграторів і використовує для вимірювання поточних координат результат двократного інтегрування вихідного сигналу акселерометра. Результати вимірювання поточних координат, що отримані у першому та другому вимірювальних каналах, усереднюються першим суматором. При цьому забезпечуються додаткова компенсація похибок вимірювань на основі комплектування двох каналів вимірювання поточних координат об'єкта [4, С. 376-380; 5, С. 65-68]. В результаті зменшується трансформована похибка обчислення переміщень об'єктів і підвищується точність пристрою-винаходу. Оскільки до блока визначення поточних координат від блока пам'яті надходить все відеозображення об'єкта вимірювань, то блок визначення поточних координат може вимірювати координати як контурних точок об'єкта вимірювань, так і будь-якої іншої точки, що належить цьому об'єкту. В результаті цього забезпечується розширення функціональних можливостей пристрою-винаходу. Введений до пристрою-винаходу блок визначення швидкості та прискорення у сукупності з акселерометром, першим інтегратором та фільтром нижніх частот, другим та третім суматором забезпечує високоточне визначення параметрів руху об'єктів вимірювань і розширення функціональних можливостей пристрою-винаходу. Таким чином, у пристрої-винаході забезпечується підвищення точності та розширення функціональних можливостей вимірювання параметрів руху об'єктів. Суть винаходу пояснюється кресленням, на якому зображено структурну схему пристрою для вимірювання параметрів руху об'єктів. Пристрій-винахід містить пристрій 3 формування відеозображень, аналого-цифровий перетворювач 13, блок 14 пам'яті, блок 6 визначення поточних координат, акселерометр 2, перший інтегратор 4 та другий інтегратор 8, фільтр 5 нижніх частот, перший суматор 12, другий суматор 11 та третій суматор 10, блок 9 обчислення переміщень, блок 7 визначення швидкості та прискорення. Вхід пристрою 3 формування відеозображень оптично пов'язаний з об'єктом 1 вимірювань. Вихід пристрою 3 формування відеозображень підключено до входу аналого-цифрового перетворювача 13, вихід якого підключено до входу блока 14 пам'яті, вихід якого підключено до входу блока 6 визначення поточних координат, вихід якого підключено до першого входу першого суматора 12, вихід якого підключено до входу блока 9 обчислення переміщень та до входу блока 7 визначення швидкості та прискорення, перший вихід якого підключено до першого входу другого суматора 11, а другий вихід якого підключено до першого входу третього суматора 10. Вихід акселерометра 2 підключено до входу фільтра 5 нижніх частот та до входу першого інтегратора 4, вихід якого підключено до другого входу другого суматора 11 та до входу другого інтегратора 8, вихід якого підключено до другого входу першого суматора 12. Вихід фільтра 5 нижніх частот підключено до другого входу третього суматора 10. Вихід блока 9 обчислення переміщень і виходи першого 12, другого 11 та третього 10 суматорів є виходами всього пристрою для вимірювання параметрів руху об'єктів. Пристрій-винахід працює таким чином. Пристрій 3 формування відеозображень формує в t j моменти часу j часову послідовність відеозображень об'єкта 1 вимірювань, що рухається в просторі відносно пристрою 3 формування відеозображень ( - інтервал часу між сусідніми відеозображеннями у часовій послідовності, j 1,L - номер відеозображення у цій часовій послідовності, L - загальна кількість відеозображень у часовій послідовності). На кожному j-му відеозображенні фіксується поточне положення об'єкта 1 вимірювань. Аналогоцифровий перетворювач 13 перетворює відеозображення в цифрову форму і вони записуються в блок 14 пам'яті. Блок 6 визначення поточних координат зчитує кожне відеозображення з блока 14 пам'яті, компенсує похибки відеозображень, обумовлені нестабільністю зовнішнього освітлення об'єкта 1 вимірювань та його рухом відносно пристрою 3 формування 2 UA 103422 C2 5 відеозображень, а також визначає поточні координати точок, що належать об'єкту 1 вимірювань на відеозображенні. При цьому виконується розподіл j-го відеозображення на об'єкт 1 вимірювань і фон шляхом f сегментації на основі попередньо заданих значень яскравостей ф і foв для фону і об'єкта fф fов fn 2 вимірювань відповідно, а також порога сегментації . Далі визначаються уточнені значення яскравості об'єкта вимірювань за формулою: [6] fOBj N 1 j f (nij , mij ) N j i1 , f (nij ,mij ) (n ,m ) де - яскравість і-ої точки цифрового відеозображення з координатами ij ij , що належить об'єкту 1 вимірювань, N - загальна кількість цих точок. 10 f Подібним чином визначається уточнене значення яскравості фону фj на j-му цифровому відеозображенні з урахуванням яскравостей точок, що належать фону. Далі повторюється розподіл j-го відеозображення на об'єкт 1 вимірювань і фон, але з використанням уточненого значення яскравості fnj 15 20 fOBj для об'єкта 1 вимірювань та порога fфj fов j 2 сегментації . Така процедура забезпечує повну компенсацію похибки вимірювання поточних координат об'єкта 1 вимірювань, обумовленої нестабільністю зовнішнього освітлення, та підвищення точності пристрою-винаходу. Для визначення поточних координат контурних точок об'єкта 1 вимірювань використовуються результати розподілу відеозображення на об'єкт 1 вимірювань і фон [2]. Координати інших важливих точок об'єкта 1 вимірювань можуть бути визначені шляхом (n ,m ) алгоритмічної обробки координат ij ij . t j Наприклад, поточні координати центра мас об'єкта 1 вимірювань в моменти часу j визначаються за формулою [6, с. 57]: N j x 1j x nij N j i1 , y1j 25 30 35 y Nj mij N i1 , y де x , - відстань між сусідніми точками, що належать об'єкту 1 вимірювань на цифровому відеозображенні, по горизонталі і вертикалі відповідно. r Поточне положення центра мас об'єкта 1 вимірювань характеризується радіус-вектором 1j , що поєднує початок координат та центр мас у площині відеозображення об'єкта 1 вимірювань [6]: 2 2 r1j x 1j y1y . Акселерометр 2 жорстко закріплений на об'єкті 1 вимірювань і фіксує прискорення, з яким рухається цей об'єкт 1 вимірювань. Вихідний сигнал 2 * (t) акселерометра 2 інтегрується першим 4 та другим 8 інтеграторами з урахуванням початкових умов 0 і r0 ( 0 - початкова швидкість об'єкта 1 вимірювань, r0 - його початкова координата). В результаті отримуємо на виході першого інтегратора 4 поточну швидкість об'єкта 1 вимірювань [7]: tj 2 ( t j ) 2 ( t)dt 0 0 . На виході другого інтегратора 8 отримуємо [7]: tj r2 ( t j ) 2 ( t)dt r0 0 . 3 UA 103422 C2 5 10 15 Фільтр 5 нижніх частот забезпечує фільтрацію завад, наявних у вихідному сигналі акселерометра 2 [8], і формує на його виході корисний сигнал прискорення 2 (t) об'єкта 1 вимірювань. Для подальшого підвищення точності вимірювання параметрів руху у пристрої-винаході потрібно об'єднати результати вимірювань, отримані у першому и другому вимірювальному каналах. Таке об'єднання виконують перший 12, другий 11 та третій 10 суматори для поточних значень координат, швидкості та прискорення об'єкта 1 вимірювань. Теоретичною основою вказаного об'єднання результатів вимірювань є методи комплексування декількох засобів, що одночасно вимірюють деяку фізичну величину [4, С. 376-380]. В результаті на виході першого суматора 12 отримуємо: r1j r2 j (1) rj 2 r r (t ) де 2 j - відліки сигналу 2 j на виході другого інтегратора 8, отримані в моменти часу t j j . r Остаточна оцінка поточної координати j , що обчислена згідно з формулою (1), має підвищену точність та надходить на вхід блока 7 визначення швидкості та прискорення. Блок 9 обчислення переміщень розраховує переміщення об'єкта 1 вимірювань: rj rj r( jq) , q - інтервал часу, для якого розраховуються переміщення. де Блок 7 визначення швидкості та прискорення розраховує поточні значення швидкості та прискорення об'єкта 1 вимірювань [9, С. 221-227]: 1j 20 1j M (k) * r( jmk) k 1 , M (k) * r( jmk) k 1 , (k) , (k) - вагові функції, що розраховуються за формулами: де 6 (k ) [(M 1)(M 2)(6M 1) 2 M(M 1)(M2 4) 2K(16M2 19) 30K 2 (M 1)] (k) 25 30 35 6 2 M(M2 1)(M2 4) ; [(M 1)(M 2) 6K(M 1) 6K 2 , M - кількість відеозображень з часової послідовності, що використовується для обчислення поточних значень швидкості і прискорення. Другий 11 та третій 10 суматори об'єднують результати обчислення швидкості та прискорення, отримані в першому та другому вимірювальному каналі пристрою-винаходу: 1j 2 j j 2 1j 2 j j 2 , (t ) де 2 j - відліки сигналу 2 j на виході першого інтегратора 4, отримані в моменти часу t j j ; (t ) 2 j - відліки сигналу 2 j на виході фільтра 5 нижніх частот, отримані в моменти часу t j j ; r Вихідними сигналами пристрою-винаходу є поточні значення координати j , переміщення r j , швидкості j та прискорення j , що сформовані на виходах першого суматора 12, блока 9 4 UA 103422 C2 5 10 15 20 25 30 35 40 45 обчислення переміщень, другого 11 та третього 10 суматорів. Ці величини характеризують t j поточний стан об'єкта 1 вимірювань та його переміщення в момент часу j . Експериментальними дослідженнями на діючому макеті пристрою-винаходу встановлено, що точність вимірювання параметрів переміщень у випадку використання двох вимірювальних каналів підвищено у 1,37 разу порівняно з використанням одного вимірювального каналу на базі пристрою З формування відеозображень. Таким чином, забезпечено підвищення точності та розширення функціональних можливостей пристрою-винаходу. Джерела інформації: 1. А.с. № 1062900 СССР, Η04N 7/18. Устройство для измерения параметров движения объектов / А.К. Беляев, В.И. Гриценко, Г.И. Корниенко, Б.Г. Мудла. - № 3436585/18-09; заявл. 17.05.82; опубл. 23.12.83, Бюл. № 47. 2. Претт У. Цифровая обработка изображения / У. Претт. - М.: Мир, 1982.-792 с. 3. Соренков Э.И. Точность вычислительных устройств и алгоритмов. / Э.И. Соренков, А.И. Телигин, А.С. Шаталов. - М.: Машиностроение, 1976.-200 с. 4. Самотокін Б.Б. Лекції з теорії автоматичного керування: навч. посібник для студентів вищих навчальних закладів / Б.Б. Самотокін. - Житомир: ЖІТІ, 2001.-508 с. 5. Артемьев В.М. Справочное пособие по методам исследования радиоэлектронных следящих систем / В.М. Артемьев. - М.: Высшая школа, 1984.-168 с. 6. Анисимов Б.В. Распознавание и цифровая обработка изображений: учеб. пособие для вузов / Б.В. Анисимов, В.Д. Курганов, В.К. Злобин. - М.: Высшая школа, 1983.-295 с. 7. Лазарев Ю.Ф. Кінематика. Додатки [Електронний ресурс]: навчально-довідковий матеріал / Ю.Ф. Лазарев, НТУУ "КІЛ". - Електронні текстові дані. - К.: НТУУ "КШ", 2003. - Назва з екрану. Режим доступу http://www.library.kpi.ua/html/arh_ntuu/yura/index.html 8. Гутников B.C. Фильтрация измерительных сигналов / B.C. Гутников. - Л.: Энергоатомиздат, 1990.-192 с. 9. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации / С.З. Кузьмин. - М.: Советское радио, 1974.-432 с. ФОРМУЛА ВИНАХОДУ Пристрій для вимірювання параметрів руху об'єктів, що містить пристрій (3) формування відеозображень, вхід якого оптично пов'язаний з об'єктом (1) вимірювань, а вихід підключено до входу аналого-цифрового перетворювача (13), блок (9) обчислення переміщень, перший (12) та другий (11) суматори, який відрізняється тим, що додатково введено акселерометр (2), жорстко закріплений на об'єкті (1) вимірювань, блок (14) пам'яті, блок (6) визначення поточних координат, блок (7) визначення швидкості та прискорення, перший (4) та другий (8) інтегратори, фільтр (5) нижніх частот та третій суматор (10), причому вихід аналогово-цифрового перетворювача (13) підключено до входу блока (14) пам'яті, вихід якого підключено до входу блока (6) визначення поточних координат, вихід якого підключено до першого входу першого суматора (12), вихід якого підключено до входу блока (9) обчислення переміщень та до входу блока (7) визначення швидкості та прискорення, перший вихід якого підключено до першого входу другого суматора (11), а другий вихід підключено до першого входу третього суматора (10), а вихід акселерометра (2) підключено до входу фільтра (5) нижніх частот та до входу першого інтегратора (4), вихід якого підключено до другого входу другого суматора (11) та до входу другого інтегратора (8), вихід якого підключено до другого входу першого суматора (12), а вихід фільтра (5) нижніх частот підключено до другого входу третього суматора (10), а вихід блока (9) обчислення переміщень і виходи першого (12), другого (11) та третього (10) суматорів є виходами всього пристрою. 5 UA 103422 C2 Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: руху, параметрів, пристрій, об'єктів, вимірювання
Код посилання
<a href="https://ua.patents.su/8-103422-pristrijj-dlya-vimiryuvannya-parametriv-rukhu-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання параметрів руху об’єктів</a>
Пристрій для вимірювання параметрів руху об’єктів
Номер патенту: 24142
Опубліковано: 30.10.1998
Автори: Гриценко Володимир Ілліч, Корнієнко Григорій Іванович, Мудла Борис Гордійович, Беляєв Анатолій Констянтинович
Мітки: об'єктів, пристрій, параметрів, руху, вимірювання
Текст:
...- с выходом блока сравнения, 45 а выходы - соответственно с первым и вторым входами блока вычисления перемещений, третий вход которого подключен к строчному выходу синхронизатора. 50 55 60 65 На фиг. 1 приведена структурная электрическая схема предложенного устройства; на фиг. 2 - изоб-** ражение кромки неподвижного объекта на телевизионном растре} на фиг. 3 - изображение кромки движущегося объекта на телевизионном растре. Предложенное...
Пристрій для вимірювання і реєстрації параметрів поступального та обертального руху об’єктів досліджень
Номер патенту: 82869
Опубліковано: 26.05.2008
Автори: Подчашинський Юрій Олександрович, Гніліцький Віталій Васильович, Грабар Іван Григорович
МПК: G01B 7/00
Мітки: обертального, вимірювання, пристрій, реєстрації, параметрів, досліджень, руху, поступального, об'єктів
Формула / Реферат:
Пристрій для вимірювання і реєстрації параметрів поступального та обертального руху об'єктів досліджень, що містить датчики (1) руху та електронну обчислювальну машину (3) з паралельним інтерфейсом (4) передачі цифрових даних, який відрізняється тим, що кожен з датчиків (1) руху має вихід у вигляді одного розряду двійкового цифрового коду, який підключений безпосередньо до відповідного входу паралельного інтерфейсу (4) передачі цифрових...
Пристрій вимірювання рівнів параметрів вібрації
Номер патенту: 60661
Опубліковано: 25.06.2011
Автори: Шантир Сергій Валерійович, Шантир Антон Сергійович, Шантир Діана Сергіївна, Павлишин Микола Михайлович
МПК: G01H 1/00
Мітки: параметрів, вібрації, вимірювання, рівнів, пристрій
Формула / Реферат:
Пристрій вимірювання рівнів параметрів вібрації, який містить віброперетворювач, перестроюваний фільтр, аналого-цифровий перетворювач, блок обчислень, перетворювач середньоквадратичного значення вихід якого з'єднаний із входом індикатора, який відрізняється тим, що додатково містить блок обчислення невизначеності та другий індикатор, причому вихід віброперетворювача з'єднаний зі входом перестроюваного фільтра, вихід якого з'єднаний зі входом...
Приладова система для вимірювання геометричних параметрів виробів
Номер патенту: 82859
Опубліковано: 27.08.2013
Автор: Подчашинський Юрій Олександрович
МПК: G01B 7/00
Мітки: приладова, система, вимірювання, виробів, геометричних, параметрів
Формула / Реферат:
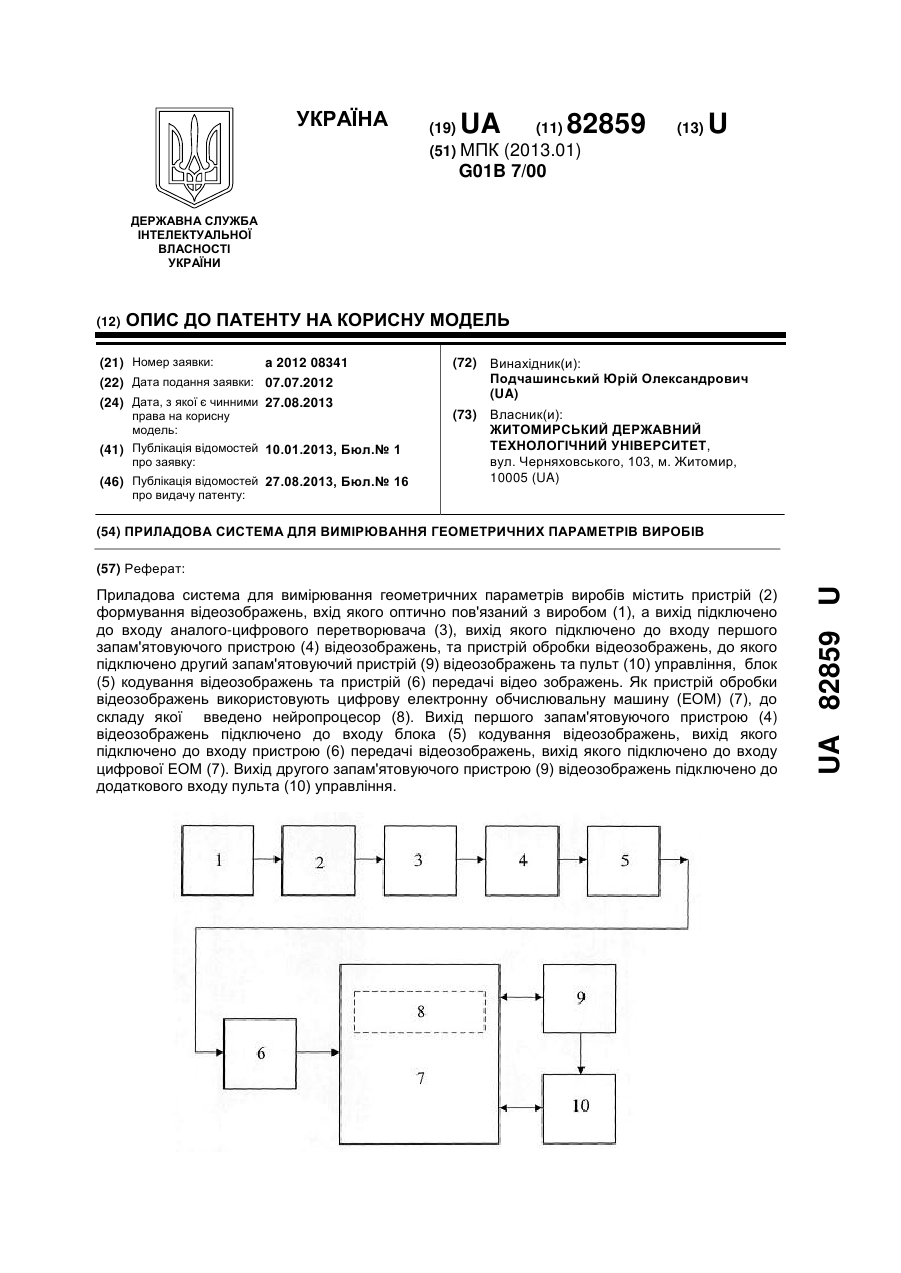
Приладова система для вимірювання геометричних параметрів виробів, що містить пристрій (2) формування відеозображень, вхід якого оптично пов'язаний з виробом (1), а вихід підключено до входу аналого-цифрового перетворювача (3), вихід якого підключено до входу першого запам'ятовуючого пристрою (4) відеозображень, та пристрій обробки відеозображень, до якого підключено другий запам'ятовуючий пристрій (9) відеозображень та пульт (10)...
Спосіб ультразвукового вимірювання параметрів руху і пристрій для його реалізації
Номер патенту: 67829
Опубліковано: 15.07.2004
Автори: Гірник Сергій Арнольдович, МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ, БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ, Волохов Володимир Олексійович
МПК: A61B 8/00
Мітки: пристрій, параметрів, спосіб, руху, ультразвукового, вимірювання, реалізації
Формула / Реферат:
1. Спосіб ультразвукового імпульсного вимірювання параметрів руху суцільних середовищ, який містить задання напрямку зондування досліджуваного середовища, періодичне випромінювання вздовж заданого напрямку зондування послідовності зондуючих ультразвукових хвильових імпульсів, прийом ультразвукових хвиль, відбитих від досліджуваного середовища, перетворення відбитих ультразвукових хвиль в електричний сигнал відгуку, його підсилення,...
Попередній патент: Спосіб формування мікрохвильових сигналів з малим кроком сітки частот
Наступний патент: Спосіб виготовлення металевих виробів із утилізованих металовідходів
Випадковий патент: Виносна опора підйомно-транспортного засобу