Пристрій для вимірювання параметрів руху об’єктів
Номер патенту: 24142
Опубліковано: 30.10.1998
Автори: Корнієнко Григорій Іванович, Гриценко Володимир Ілліч, Мудла Борис Гордійович, Беляєв Анатолій Констянтинович
Текст
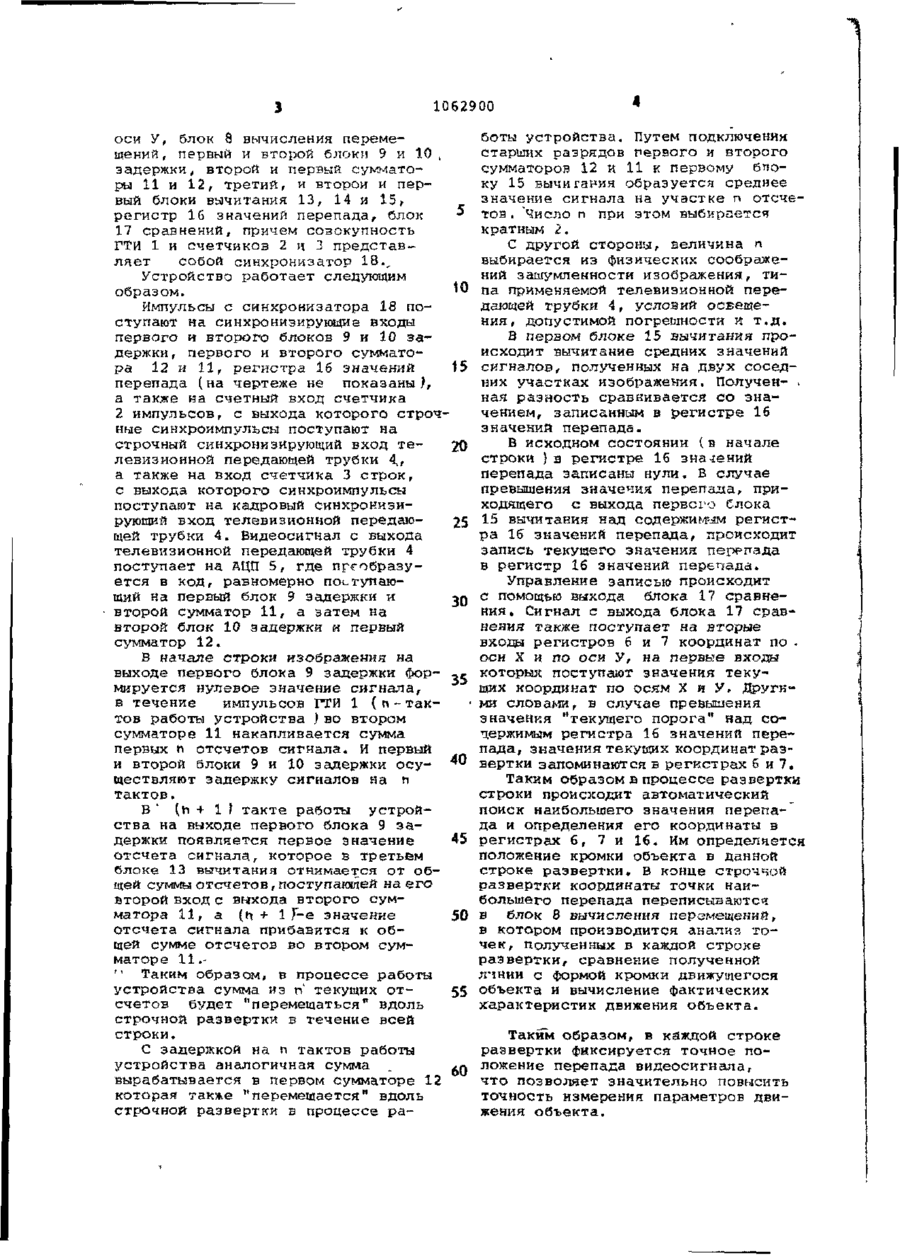
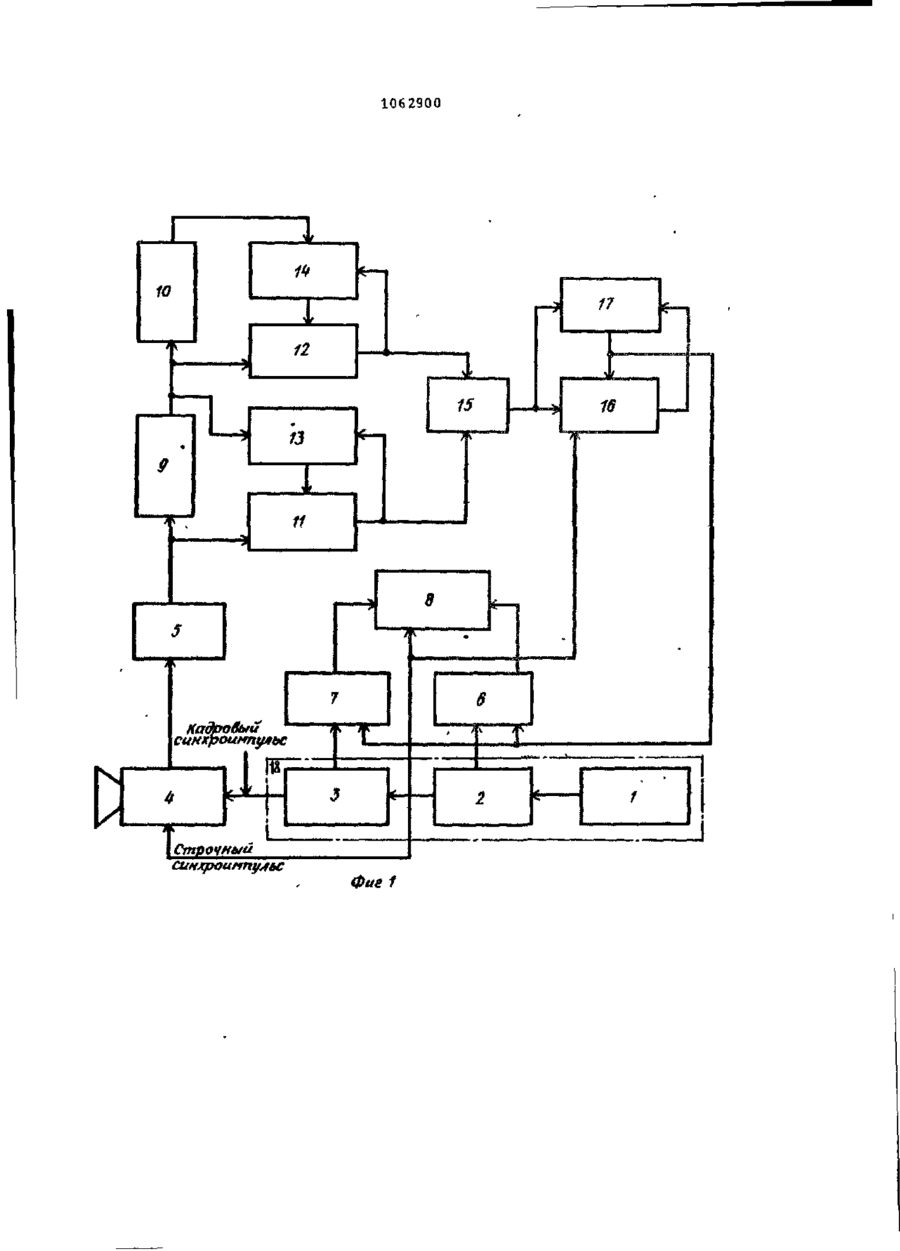
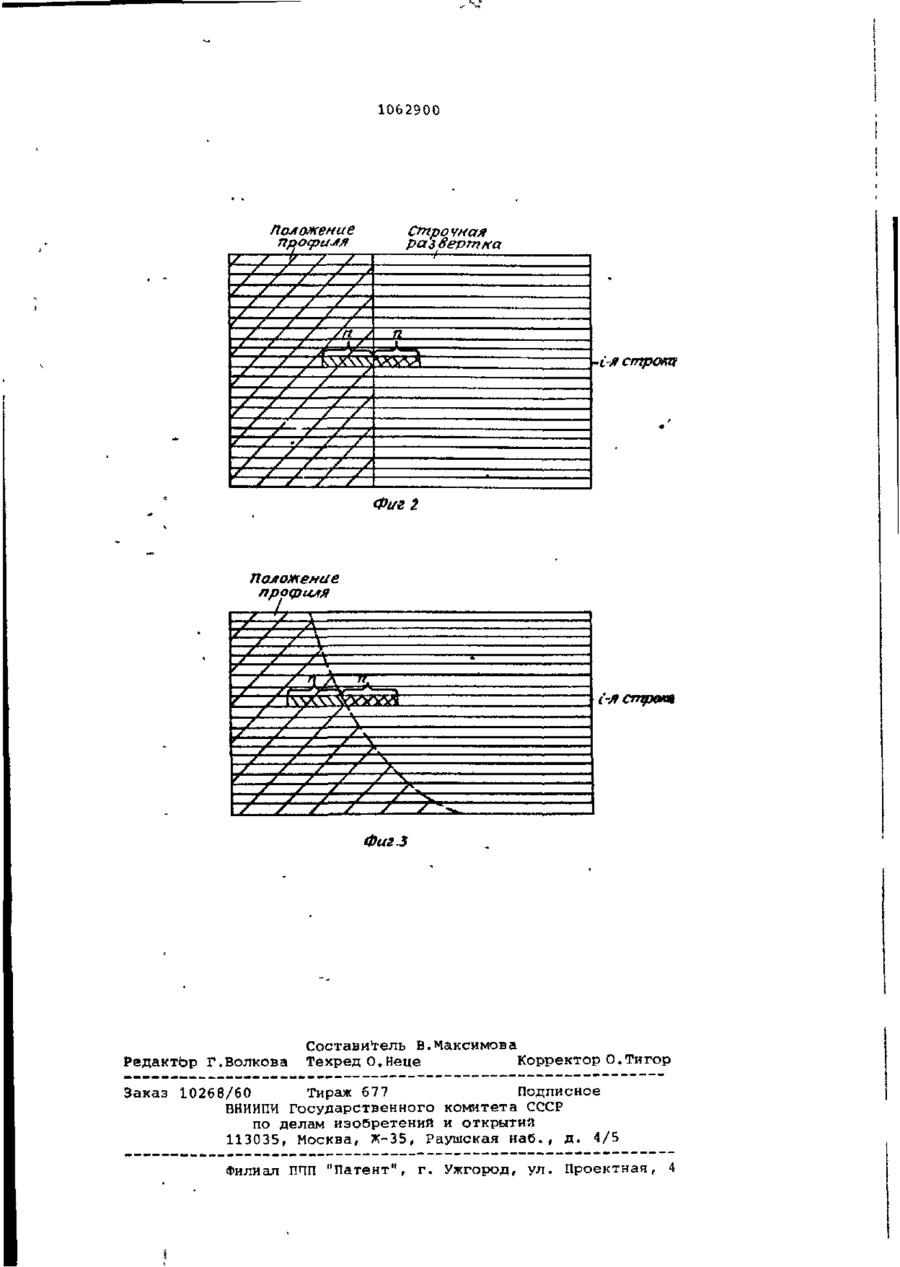
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ, " содержащее последовательно соединенные синхронизатор и телевизионную передающую трубку, аналого-цифровой преобразователь (АЦП), первчй блок вычитания, выход которого соединен с первым входом блока сравнения, и блок вычисления перемещений, о т л и ч а ю щ е е с я тем, что, с целью повышения точности измерения параметров движения, введены первый бпок задержки, второй блок задержки{ второй блок вычитания и первый сумматор, включенные последовательно между выходом АЦП и первым входом первого блока вычитания, третий блок вычитания и второй сумматор, включенные последовательно между выходом первого блока задержки и вторым входом первого блока вычитания, 'причем второй вход первого сумматора соединен с выходом пеового блока задержки, а в^ход со вторым входом второго блока вычитания, второй вход второго сумматора подключен к выходу АЦП, а выход - к второму входу третьего блока вычитания, вход АЦП соединен с выходом телевизионной передающей трубки,-а также регистр значений перепада, первый вход которого соединен со строчным выходом синхронизатора, второй вход - с выходом первого блока вычитания, третий вход -~с выходом блока сравнения, а выход - с вторым входом блока сравнения, регистр координаты по оси У и регистр координаты по оси X, первые входы которых соединены с соответствующими входами синхронизатора, вторые входы - с выходом блока сравнения, а выходы - соответственно с первым и вторым входами блока вычисления перемещений, третий вход которого подключен к строчному выходу синхронизатора. СО 1062900 Изобретение относится к прикладному телевидению и может быть использовано для бесконтактного измерения параметров движения объектов . Известно устройство для измерения геометрических размеров изделий, содержащее последовательно соединенные телевизионный датчик на базе сканистора, формирователь измерительного импульса, регистратор, генератор начального уровня формирования измерительного импульса и регулятор уровня формирования. Измеряемое изделие проецируется на "мишень" сканистора телевизионного датчика, в котором световое изображение преобразуется в электрический сигнал. На выходе датчика появляется импульс, передний фронт которого содержит необходимую информацию об измеряемом изделии, а именно временное положение середины этого фронта в строке соответствует координате кромки измеряемого изделия [1 1. Однако различная освещенность изделия вызывает смещение середины переднего фронта импульса, что влечет за собой ошибку в измерении. Для компенсации этой ошибки и служат генератор начального уровня формирбвания измерительного импульса с регулятором уровня формирования. В случае движения изделия вдоль развертки сканистора происходит дополнительное искажение переднего фронта импульса, что обусловит периодичность срабатывания генератора начального уровня формирования измерительного импульса, что, в свою очередь, приведет к дополнительным погрешностям в определении положения кромки изде- лия. Следовательно, недостатком известного устройства является малая точность измерения. Наиболее близким к предлагаемому является устройство для измерения параметров движения объектов, содержащее последовательно соединенные синхронизатор и телевизионную передающую трубку, аналого-цифровой преобразователь, первый блок вычитания, блок памяти, блок сравнения, блок вычисления перемещений. Измерение параметров движения объекта этим устройством осуществляется в течение последовательно-повторяющихся одинаковых циклов, каждый из которых включает четыре кадра развертки С 2 ] . Недостатком известного устройств а является отсутствие фиксации положения фронта импульса, соответствую t j r о] кромке движущегося • fe объекта, что затрудняет точное вычисление параметров движения объекта с учетом скорости строчной развертки. Целью изобретения является повышение точности измерения параметров движения объекта. Поставленная цель достигается тем, что в устройство для измерения параметров движения объектов, содержащее последовательно соеди10 ненные синхронизатор и телевизионную передающую трубку, аналого-цифровой преобразователь (АЦП), первый блок вычитания, выход которого соединен с первым входом блока сравне15 ния , и блок вычисления перемещений, введены первый блек задержки, второй блок задержки, второй блок вычитания и первый сумматор, включенные последовательно между выходом АЦП и первым входом первого блока вычитания, третий блок вычитания и второй 'сумматор, включенные последовательно между выходом первого блока задержки и вторым входом первого блока вычитания, причем 25 второй вход первого сумматора соединен с выходом первого блока задержки, 'а выход - со вторым входом второго блока вычитания, второй вход второго сумматора подключен 30 к выходу АЦП, а выход - к второму входу третьего блока вычитания, вход &ЦП соединен с выходом телевизионной передающей трубки, а также регистр значений перепада/ первый 35 вход которого соединен со строчным выходом синхронизатора, второй вход - с выходом первого блока вычитания, третий вход - с выходом блока сравнения, а выход - с вторым входом блока сравнения, регистр ко40 ординаты по оси У и регистр координаты по оси X,. первые входы которых соединены с соответствующими выходами синхронизатора, вторые входы - с выходом блока сравнения, 45 а выходы - соответственно с первым и вторым входами блока вычисления перемещений, третий вход которого подключен к строчному выходу синхронизатора. 50 55 60 65 На фиг. 1 приведена структурная электрическая схема предложенного устройства; на фиг. 2 - изоб-** ражение кромки неподвижного объекта на телевизионном растре} на фиг. 3 - изображение кромки движущегося объекта на телевизионном растре. Предложенное устройство содержит генератор 1 тактовых импульсов (ГТИ }, счетчик 2 импульсов, счетчик 3 строк, телевизионную пере,даЕощую трубку 4 Р аналого-цифровой преобразователь (ЛЦП) 5, регистр б и 7, координаты по оси X и по 1062900 оси У, блок 8 вычисления перемещений, первый и второй блоки 9 и 10 , задержки, второй и первый сумматоры 11 и 12, третий, и второй и первый блоки вычитания 13, 14 и 15, регистр 16 значений перепада*- блок 17 сравнений, причем совокупность ГТИ 1 и счетчиков 2 и 3 представляет собой синхронизатор 18., Устройство работает следующим образом. Импульсы с синхронизатора 18 поступают на синхронизирующие входы первого и второго блоков 9 и 10 задержки, первого и второго сумматора 12 и 11, регистра 16 значений 15 перепада (на чертеже не показаны), а также на счетный вход счетчика 2 импульсов, с выхода которого строчные синхроимпульсы поступают на строчный синхронизирующий вход те20 левизионной передающей трубки 4,, а также на вход счетчика 3 строк, с выхода которого синхроимпульсы поступают на кадровый синхронизирующий вход телевизионной передаю25 щей трубки 4. Видеосигнал с выхода телевизионной передающей трубки 4 поступает на АЦП 5, где преобразуется в код, равномерно поступающий на первый блок 9 задержки и 30 второй сумматор 11, а затем на второй блок 10 з адержки и первый сумматор 12, В начале строки изображения на выходе первого блока 9 задержки формируется нулевое значение сигнала, в течение импульсов ГТИ 1 ( п - тактов работы устройства ) во втором сумматоре 11 накапливается сумма первых к отсчетов сигнала. И первый и второй блоки 9 и 10 задержки осуществляют задержку сигналов на п тактов. В' (h + 1 ) такте работы устройства на выходе первого блока 9 задержки появляется первое значение отсчета сигнала, которое в третьем блоке 13 вычитания отнимается от общей суммы отсчетов, поступающей на его второй вход с выхода второго сумматора 11, а (п + 1 Г-е значение отсчета сигнала прибавится к общей сумме отсчетов во втором сумматоре 11." Таким образом, в процессе работы устройства сумма из ( текущих отV счетов будет "перемещаться" вдоль строчной развертки в течение всей строки. С задержкой на п тактов работы устройства аналогичная сумма вырабатывается в первом сумматоре 12 которая также "перемещается" вдоль строчной развертки в процессе ра 35 40 45 50 55 60 боты устройства. Путем подключения старших разрядов первого и второго сумматоров 12 и 11 к первому бпоку 15 Б Ы Ч И Г З Р И Я образуется среднее значение сигнала на участке п отсчетов. 'Число п при этом выбирается кратным 2. С другой стороны, величина п выбирается из физических соображений зашумленности изображения, типа применяемой телевизионной передающей трубки 4, условий освещения , допустимой погрешности и т.д. В первом блоке 15 эы-штания происходит вычитание средних значений сигналов, полученных яа двух соседних участках изображения. Получен- . ная разность сравнивается со значением, записанным в регистре 16 значений перепада. В исходном состоянии (в начале строки } в регистре 16 значений перепада записаны нули. В случае превышения значения перепала, приходящего с выхода первого блока 15 вычитания над содержимом регистра 16 значений перепада, происходит запись текущего значения перепада в регистр 16 значений перепада. Управление записью происходит с помощью выхода блока 17 сравнения. Сигнал с выхода блока 17 сравнения также поступает на вторые входы регистров 6 и 7 координат по . оси X и по оси У, на первые входы которых поступают значения текущих координат по осям X и У, Другими словами, в случае превышения значения "текущего порога" над содержимым регистра 16 значений перепада, значения текущих координат развертки запоминаются в регистрах 6 и 7. Таким образом в процессе развертки строки происходит автоматический поиск наибольшего значения перепада и определения его координаты в регистрах 6, 7 и 16. Им определяется положение кромки объекта в данной строке развертки, В конце строчкой развертки координаты точки наибольшего перепада переписываются в блок 8 вычисления перемещений, в котором производится анализ точек, полученных в каждой строке развертки, сравнение полученной л'інии с формой кромки движущегося объекта и вычисление фактических характеристик движения объекта. Таким образом, в каждой строке развертки фиксируется точное положение перепада видеосигнала, что позволяет значительно повысить точность измерения параметров движения объекта. 1062900 синхроимпульс 1062900 Строчная развертна положение / // / t У / У У / У ' / / у / У s—/ у / У у / / У / У / / / / / / / к\х\\л / У / / / у у / / / / / / У У /П У / / J X/ / • / '/ / У У У / / / У у / / У п =^= ^ -С-я строт У / S / / J / •/•—у*/ / / t У У • S Фиг Г Положение профиля / 1 л / Г л У У У / у1 п. У \ У у У У у У Редактор Г.Волкова / У У у' / * \ У* j' / у у * У \\ \л\\ \YYYWU / \ / / • f \ Л у ' \ \ S Л • У\ У \ / пА / f У / / s чУ\ / У \ / v / У У "^ Составитель В.Максимова Техред О.Неце Корректор О.Тигор Заказ 10268/60 Тираж 677 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская н а б . , д . 4/5 Филиал П П "Патент", г . Ужгород, ул. Проектная, 4 П
ДивитисяДодаткова інформація
Автори англійськоюHrytsenko Volodymyr Illich
Автори російськоюГриценко Владимир Ильич
МПК / Мітки
Мітки: параметрів, вимірювання, об'єктів, пристрій, руху
Код посилання
<a href="https://ua.patents.su/6-24142-pristrijj-dlya-vimiryuvannya-parametriv-rukhu-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання параметрів руху об’єктів</a>
Пристрій для вимірювання параметрів інерційних ланок
Номер патенту: 4063
Опубліковано: 27.12.1994
Автори: Гусєв Ігор Вікторович, Загарій Генадій Іванович, Гусєв Павло Вікторович, Мамонов Анатолій Васильович, Ситник Борис Тимофійович, Левочко Борис Степанович
МПК: G05B 23/02
Мітки: ланок, вимірювання, пристрій, інерційних, параметрів
Формула / Реферат:
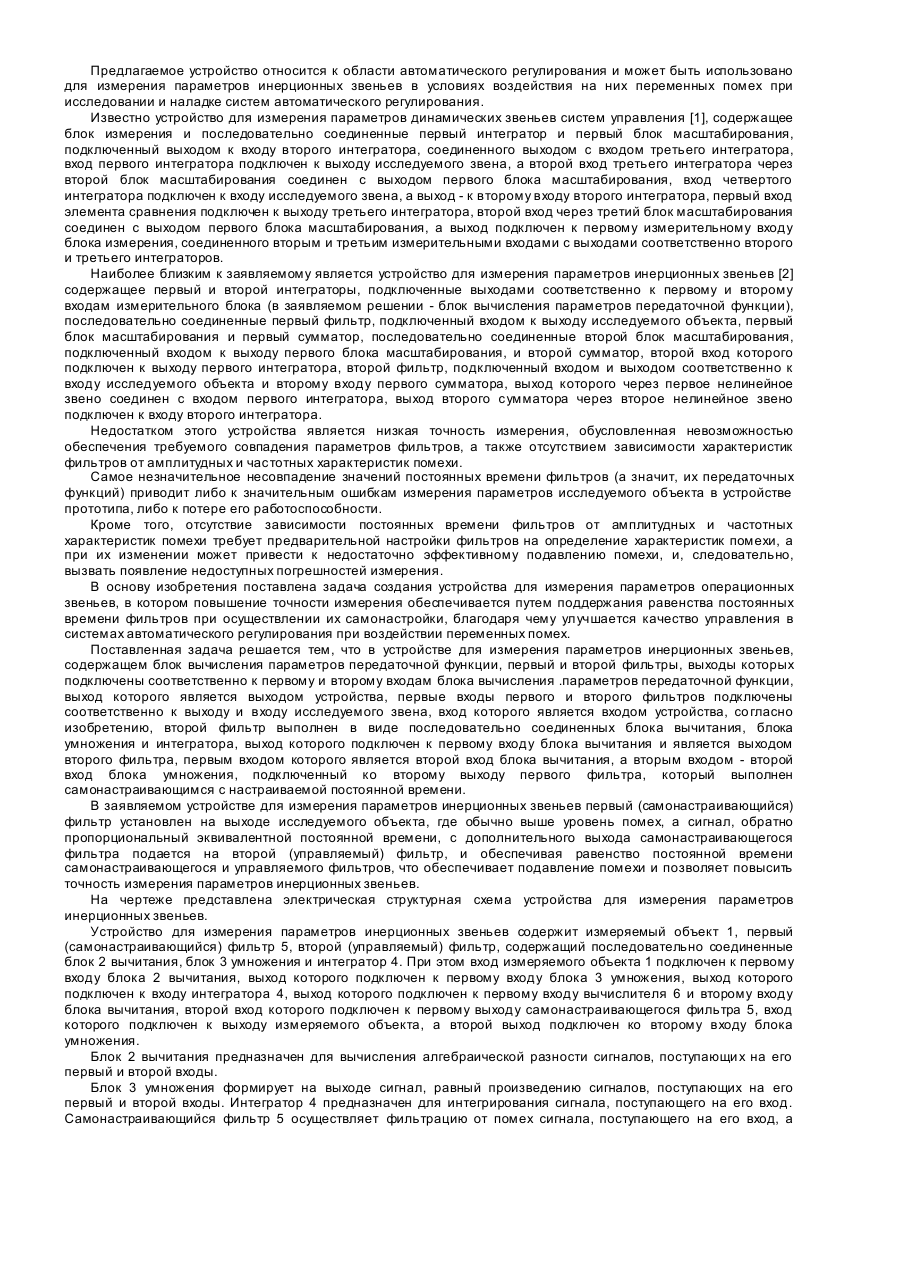
Устройство для измерения параметров инерционных звеньев, содержащее блок вычисления параметров передаточной функции, первый и второй фильтры, выходы которых подключены соответственно к первому и второму входам блока вычисления параметров передаточной функции, выход которого является выходом устройства, а первые входы первого и второго фильтров подключены соответственно к выходу и входу исследуемого звена, вход которого является входом...
Пристрій для вимірювання координат об’єкту
Номер патенту: 24137
Опубліковано: 30.10.1998
Автори: Гриценко Володимир Ілліч, Корнієнко Григорій Іванович, Підгірний Євген Іванович, Любімов Олександр Дмитрович
Мітки: координат, пристрій, об'єкту, вимірювання
Формула / Реферат:
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА, содержащее последовательно соединенные синхронизатор, телевизионную передающую камеру, аналого-цифровой преобразователь (АЦП), блок суммирования, блок вычитания, блок сравнения и регистр значений перепада, выход которого соединен с вторым входом блока сравнения, а также блок вычисления перемещения, блокзадержки, вход которого объединен с входом блока суммирования, регистр координаты по оси X и...
Пристрій для вимірювання фазового зсуву
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Токовенко Степан Омелянович, Свідлер Ігор Давидович
МПК: G01R 25/00
Мітки: зсуву, фазового, пристрій, вимірювання
Формула / Реферат:
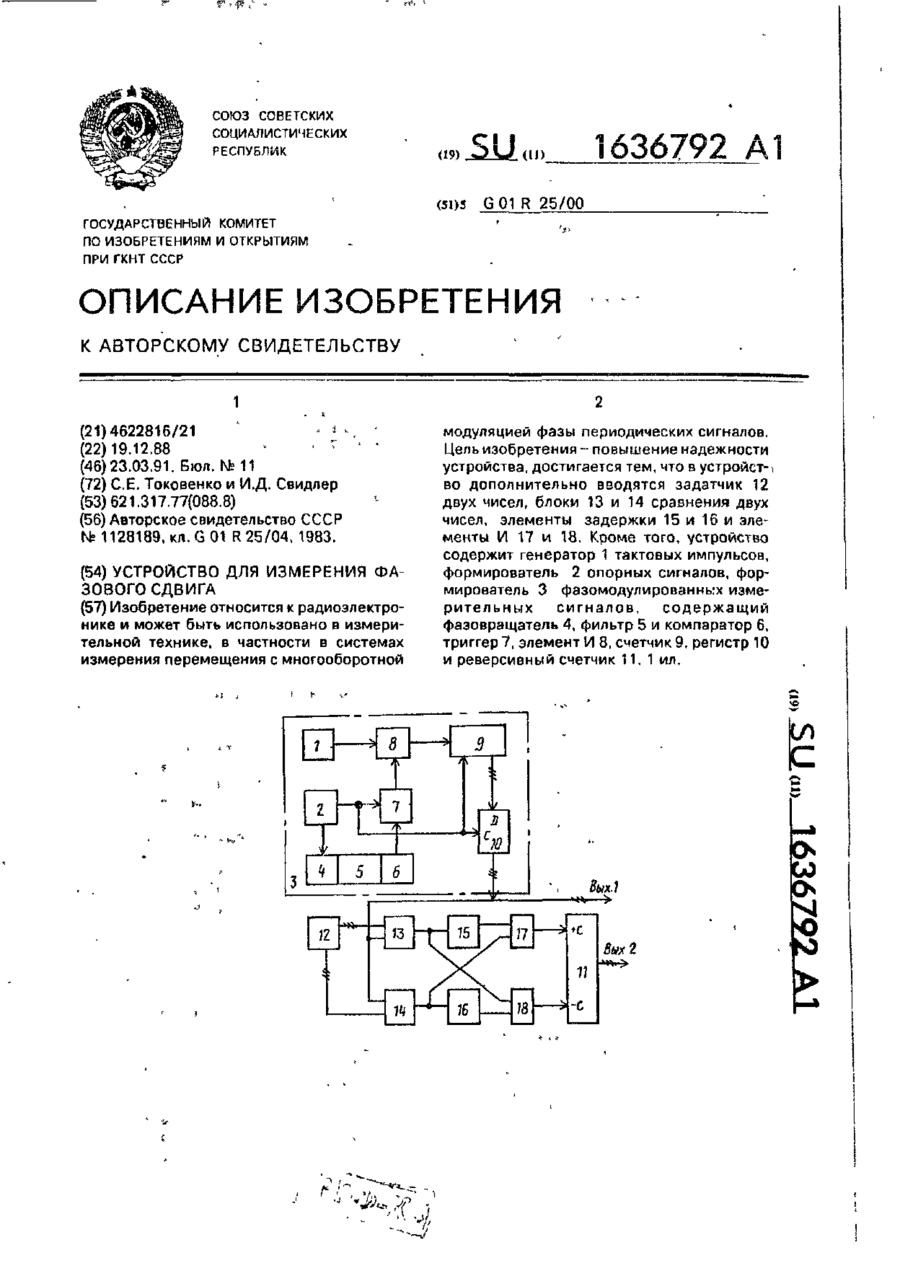
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Пристрій розділення сигналів яскравості та кольоровості у декодері системи секам
Номер патенту: 19136
Опубліковано: 25.12.1997
Автори: Медвєдев Юрій Андрійович, Матвєєв Олександр Олександрович, Шишкін Олександр Володимирович, Дідич Юрій Романович, Платзерова Наталія Олександрівна, Гофайзен Олег Вікторович, Крюкова Тетяна Дмитрівна, Сташків Юрій Володимирович, Басій Валерій Тимофійович, Бабич Володимир Васильйович
МПК: H04N 9/78
Мітки: кольоровості, секам, пристрій, системі, декодері, яскравості, сигналів, розділення
Формула / Реферат:
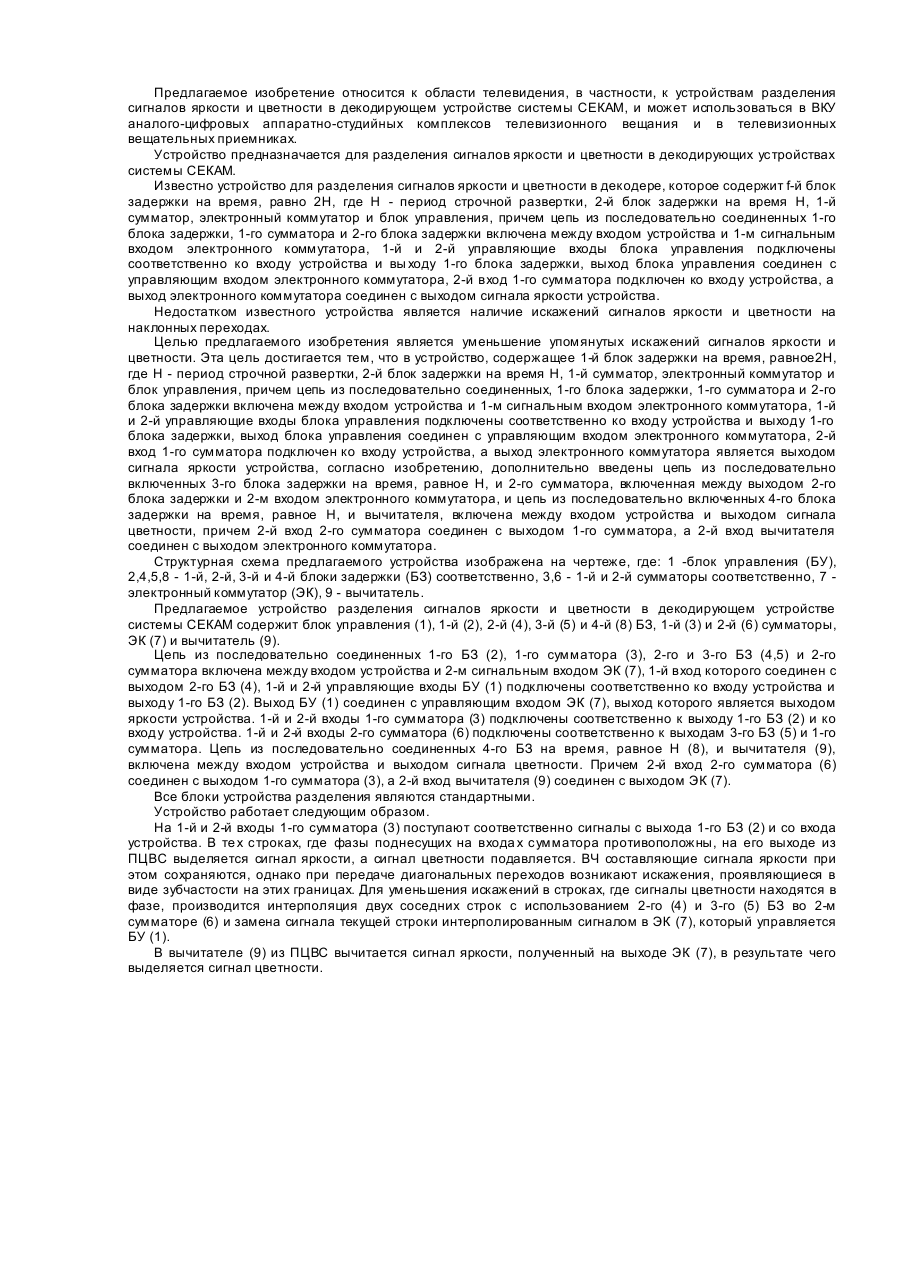
Устройство разделения сигналов яркости и цветности в декодере системы СЕКАМ, содержащее блок управления, выход которого соединен с управляющим входом электронного коммутатора, выход которого является выходом сигнала яркости, последовательно соединенные первый блок задержки на время 2Н, где Η - период строчной развертки, вход которого соединен с первым входом блока управления и является входом устройства, и первый сумматор, второй вход...
Пристрій для вимірювання електричних параметрів
Номер патенту: 13282
Опубліковано: 28.02.1997
Автори: Шитов Олександр Леонідович, Пономарьов Віталій Олексійович
МПК: G01R 21/06, G01R 19/06, G01R 19/22
Мітки: параметрів, електричних, вимірювання, пристрій
Формула / Реферат:
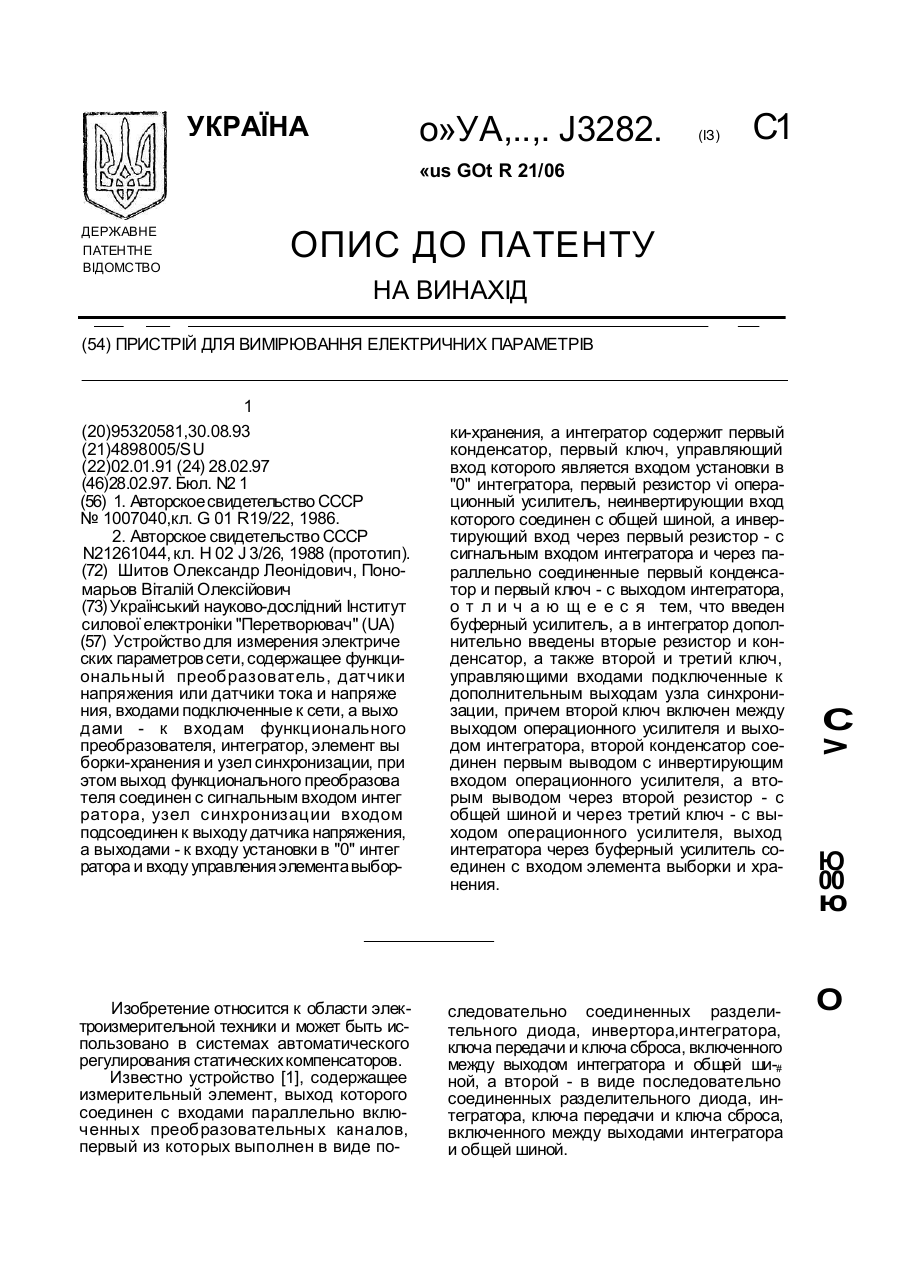
(57) Устройство для измерения электрических параметров сети, содержащее функци-ональный преобразователь, датчики напряжения или датчики тока и напряжения, входами подключенные к сети, а выходами - к входам функціонального преобразователя, интегратор, элемент выборки-хранения и узел синхронизации, приэтом выход функционального преобразователя соединен с сигнальным входом интегратора, узел синхронизации входом подсоединен к выходу датчика...
Попередній патент: Пристрій для підрахунку осей транспортного засобу
Наступний патент: Лінія затримки імпульсного електричного сигналу
Випадковий патент: Спосіб руйнування біоплівок слизової оболонки піхви та шийки матки методом трансвагінального електрофорезу іонів магнію в комплексному лікуванні бактеріальних вагінозів