Спосіб дистанційного контролю об’єму шихти в шихтовому відсіку
Номер патенту: 103869
Опубліковано: 12.01.2016
Автори: Бабко Сергій Вікторович, Бурачек Всеволод Германович, Штенгєлов Віталій Петрович, Малік Тетяна Миколаївна
Формула / Реферат
Спосіб дистанційного контролю об'єму шихти в шихтовому відсіку, заснований на паралактичному методі визначення координат, який відрізняється тим, що осі цифрових вимірювальних камер попередньо орієнтують в площині, яка паралельна площині ![]() одного з бортів шихтового відсіку; фотоприймальні матриці (ФПМ) цифрових камер орієнтують так, щоб лінії рядків (стовпців) знаходилися в площині паралельній
одного з бортів шихтового відсіку; фотоприймальні матриці (ФПМ) цифрових камер орієнтують так, щоб лінії рядків (стовпців) знаходилися в площині паралельній ![]() і в горизонтальній площині, при цьому за допомогою камер в задані моменти часу фіксують відліки положення світлової відбитої мітки-індексу на поверхні шихти і визначають координати цієї поверхні в проекції на площинах
і в горизонтальній площині, при цьому за допомогою камер в задані моменти часу фіксують відліки положення світлової відбитої мітки-індексу на поверхні шихти і визначають координати цієї поверхні в проекції на площинах ![]() і
і ![]() , зокрема висоти мітки-індексу отримують за формулою:
, зокрема висоти мітки-індексу отримують за формулою:
![]() ,
,
де ![]() - висота горизонтальної лінії об'єктів в цифрових камерах над основою шихтового відсіку;
- висота горизонтальної лінії об'єктів в цифрових камерах над основою шихтового відсіку;
![]() - горизонтальна база між цифровими камерами;
- горизонтальна база між цифровими камерами;
![]() - проекції кутів нахилу оптичних осей камер на площину
- проекції кутів нахилу оптичних осей камер на площину ![]() ;
;
![]() ;
;
![]() ;
;
![]() - проекції вертикальних кутів нахилу контрольних ліній на площину
- проекції вертикальних кутів нахилу контрольних ліній на площину ![]() ;
;
![]() - проекції кутів між оптичними осями камер і контрольними візирними лініями;
- проекції кутів між оптичними осями камер і контрольними візирними лініями;
![]() - відліки в кутовій мірі по стовпчиках фотоприймальних матриць камер;
- відліки в кутовій мірі по стовпчиках фотоприймальних матриць камер;
визначення координат світлової мітки-індексу по осях ![]() і
і ![]() виконують аналогічно по проекціях вищеописаних візирних ліній і робочих світлових променів на площині
виконують аналогічно по проекціях вищеописаних візирних ліній і робочих світлових променів на площині ![]() , враховуючи звіти по рядках фотоприймальних матриць, зорієнтованих паралельно осі
, враховуючи звіти по рядках фотоприймальних матриць, зорієнтованих паралельно осі ![]() , після чого за отриманими координатами світлової відбитої мітки-індексу на поверхні шихти
, після чого за отриманими координатами світлової відбитої мітки-індексу на поверхні шихти ![]() і перевищенням
і перевищенням ![]() формують цифрову модель шихтової поверхні і обчислюють об'єм шихти:
формують цифрову модель шихтової поверхні і обчислюють об'єм шихти:
![]() ,
,
де ![]() - об'єм елементарного паралелепіпеда з середньою висотою
- об'єм елементарного паралелепіпеда з середньою висотою ![]() ;
;
![]() - об'єм частини шихтового відсіку за рахунок спотворення прямокутної форми в придонній зоні шихтового відсіку (визначається завчасно).
- об'єм частини шихтового відсіку за рахунок спотворення прямокутної форми в придонній зоні шихтового відсіку (визначається завчасно).
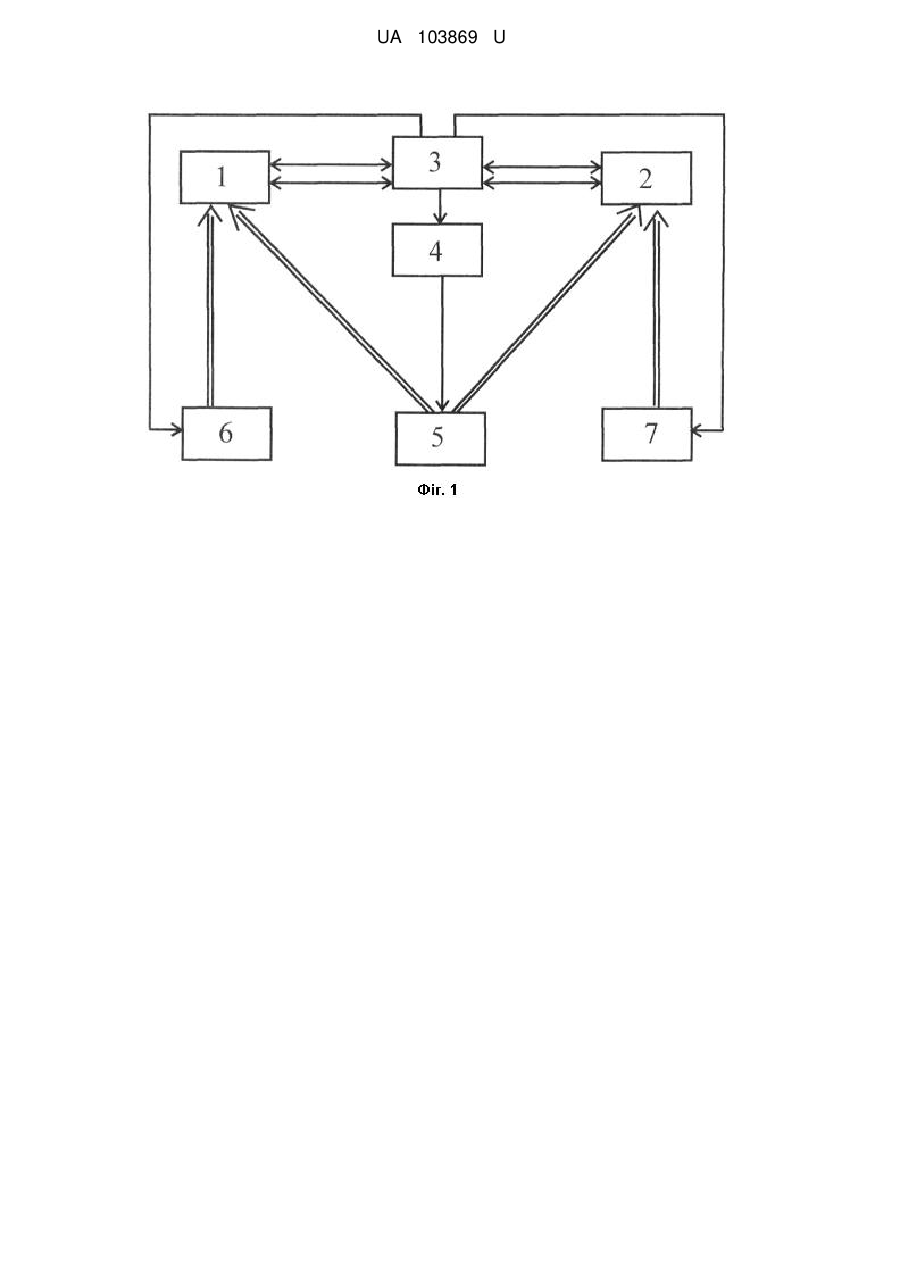
Текст
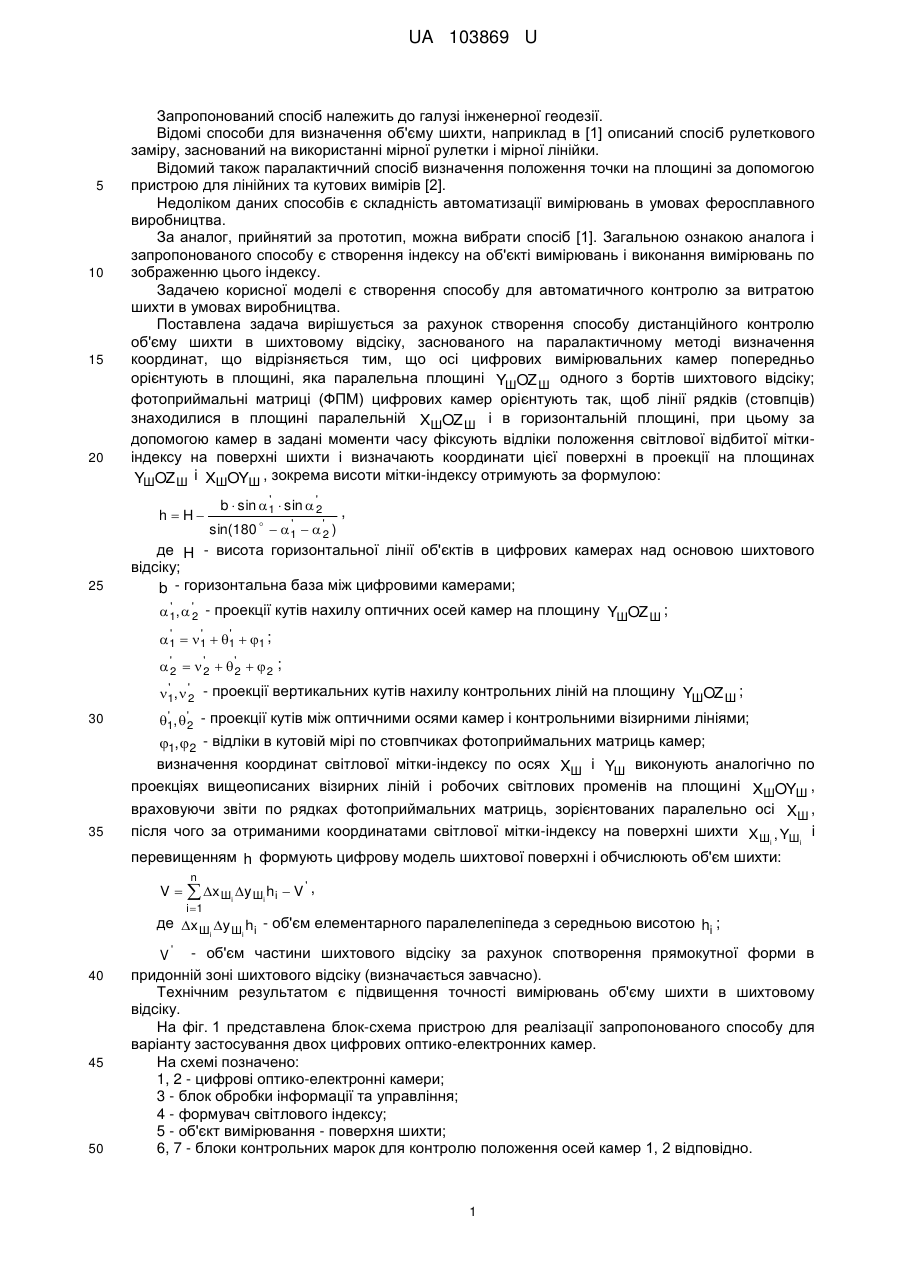
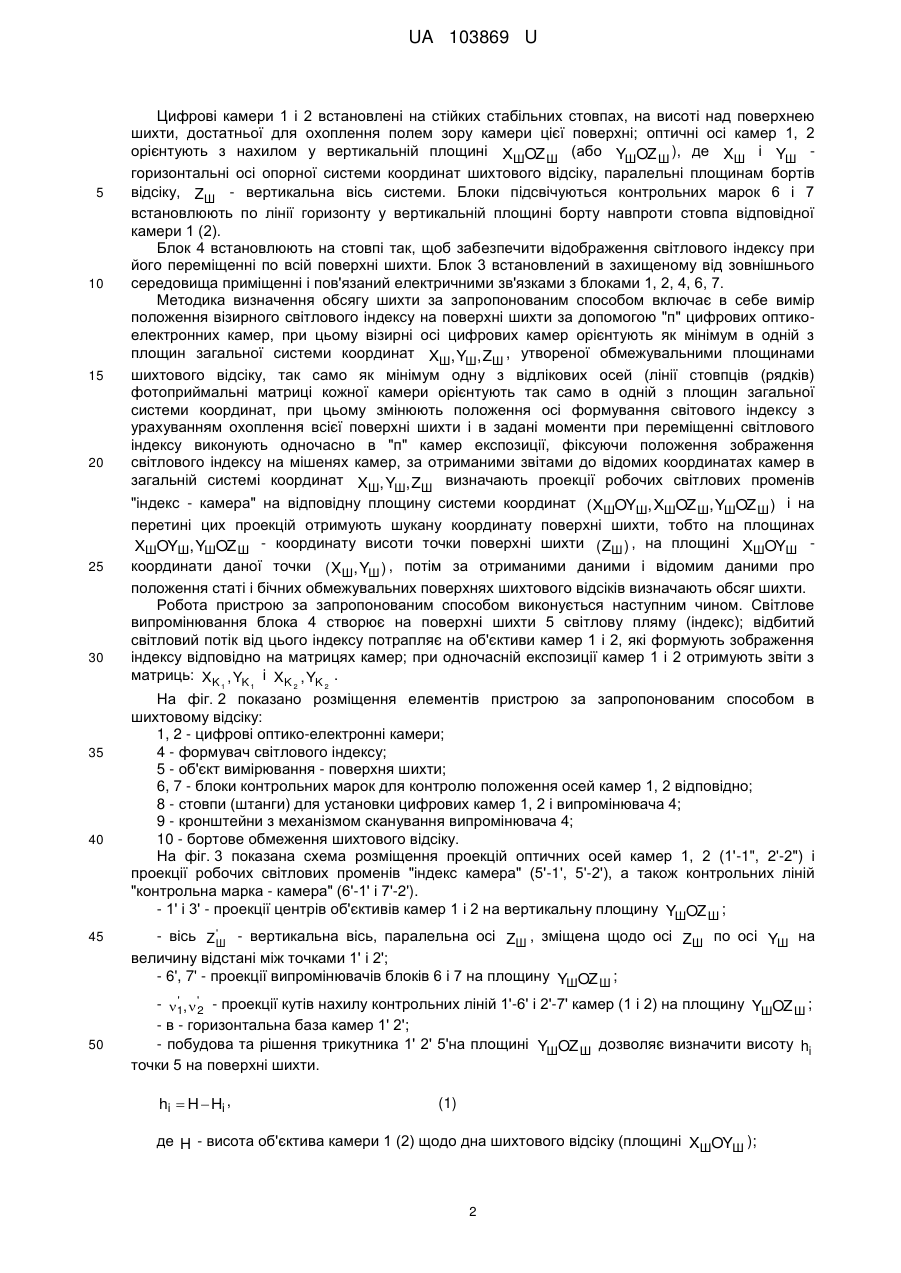
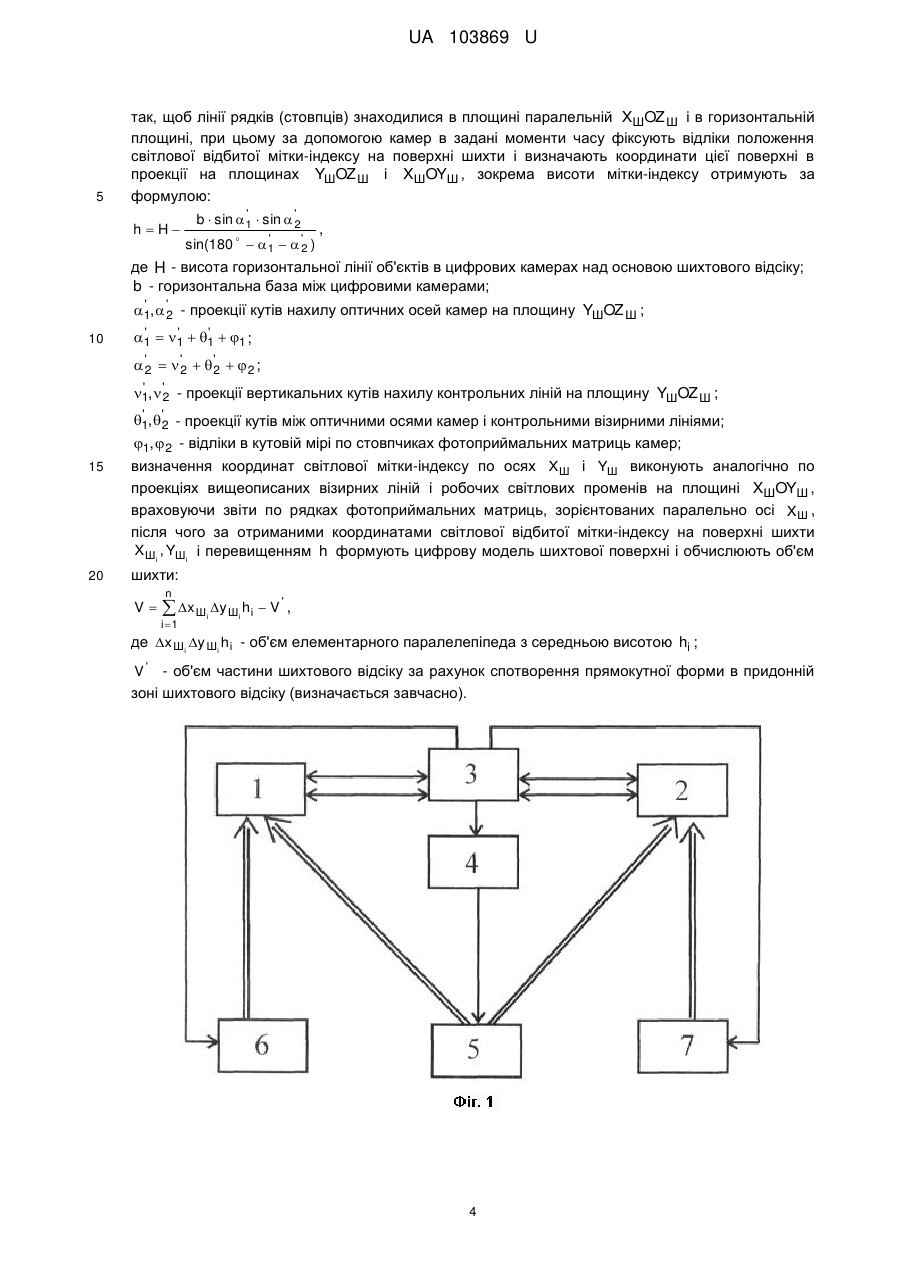
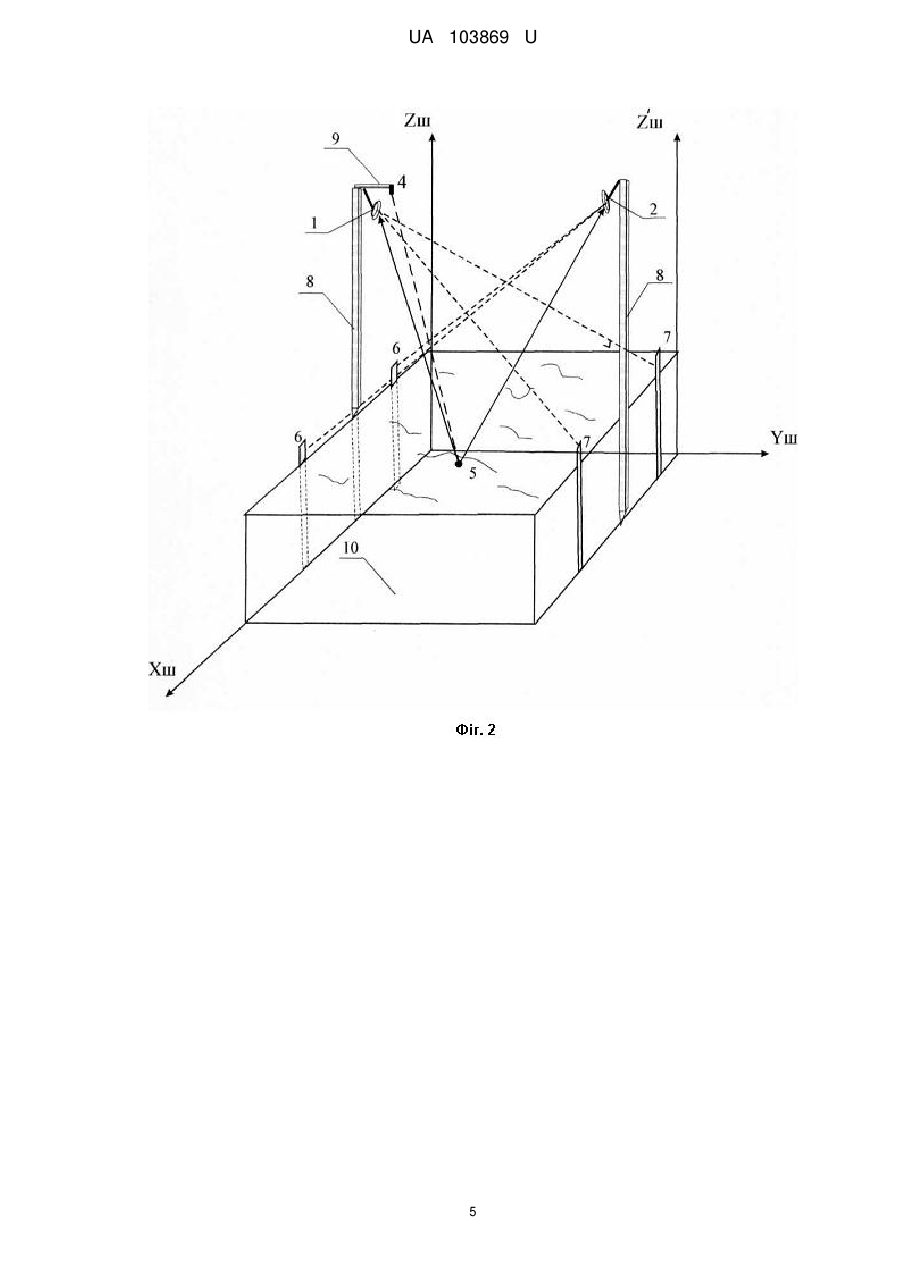
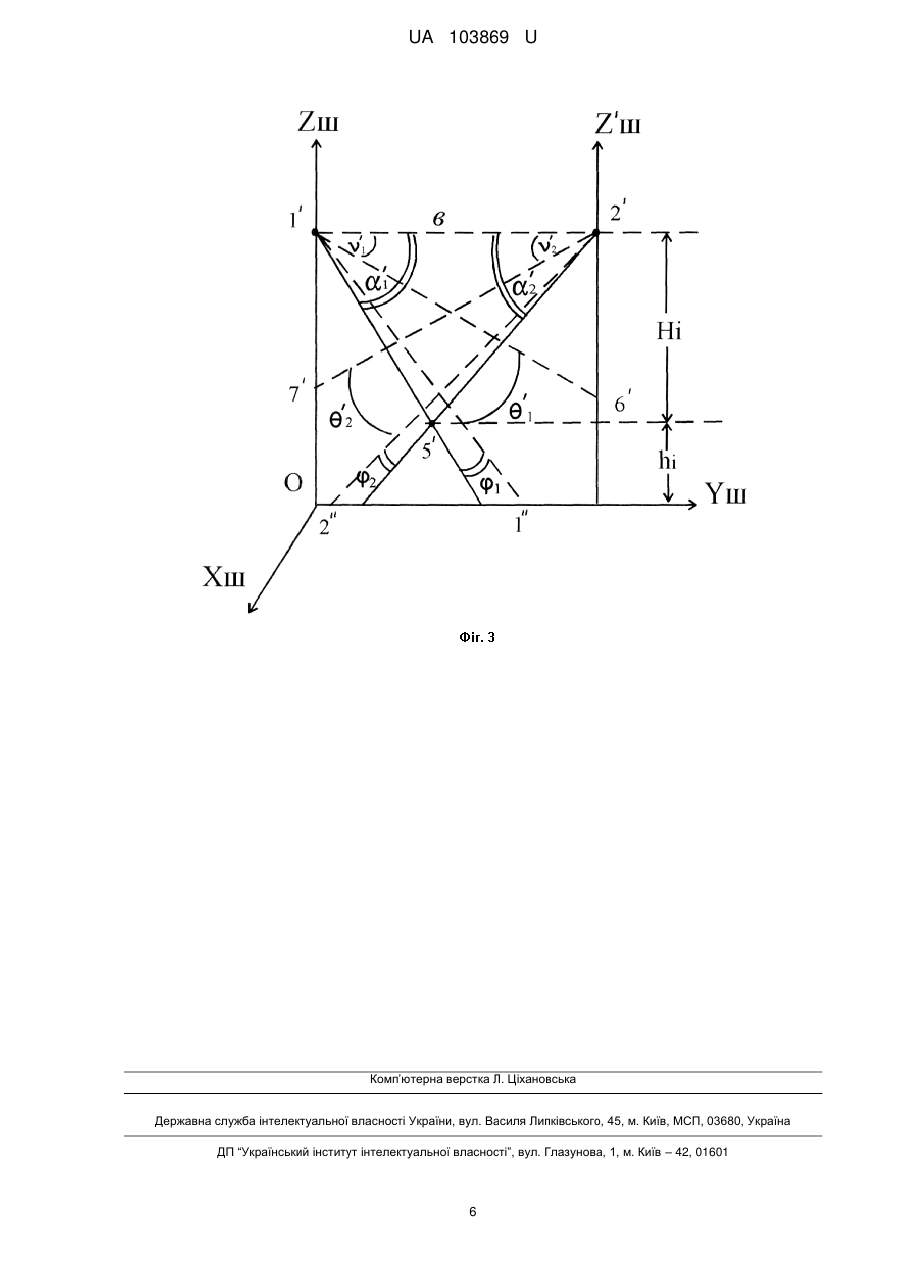
Реферат: Спосіб дистанційного контролю об'єму шихти в шихтовому відсіку, заснований на паралактичному методі визначення координат. Осі цифрових вимірювальних камер попередньо орієнтують в площині яка паралельна площині YШOZ Ш одного з бортів шихтового відсіку. Фотоприймальні матриці (ФПМ) цифрових камер орієнтують так, щоб лінії рядків (стовпців) знаходилися в площині паралельній XШOZ Ш і в горизонтальній площині. За допомогою камер в задані моменти часу фіксують відліки положення світлової відбитої мітки-індексу на поверхні шихти і визначають координати цієї поверхні в проекції на площинах YШOZ Ш і XШOYШ . Висоти мітки-індексу отримують за формулою: h H ' b sin 1 sin '2 ' sin(180 1 '2 ) . Визначення координат світлової мітки-індексу по осях XШ і YШ виконують аналогічно по проекціях вищеописаних візирних ліній і робочих світлових променів на площині XШOYШ , враховуючи звіти по рядках фотоприймальних матриць, зорієнтованих паралельно осі XШ . За отриманими координатами світлової відбитої мітки-індексу на поверхні шихти X Шi , YШi і перевищенням h формують цифрову модель шихтової поверхні і обчислюють об'єм шихти V n x Ш y Ш hi V ' . i 1 i i UA 103869 U (12) UA 103869 U UA 103869 U 5 10 15 20 Запропонований спосіб належить до галузі інженерної геодезії. Відомі способи для визначення об'єму шихти, наприклад в [1] описаний спосіб рулеткового заміру, заснований на використанні мірної рулетки і мірної лінійки. Відомий також паралактичний спосіб визначення положення точки на площині за допомогою пристрою для лінійних та кутових вимірів [2]. Недоліком даних способів є складність автоматизації вимірювань в умовах феросплавного виробництва. За аналог, прийнятий за прототип, можна вибрати спосіб [1]. Загальною ознакою аналога і запропонованого способу є створення індексу на об'єкті вимірювань і виконання вимірювань по зображенню цього індексу. Задачею корисної моделі є створення способу для автоматичного контролю за витратою шихти в умовах виробництва. Поставлена задача вирішується за рахунок створення способу дистанційного контролю об'єму шихти в шихтовому відсіку, заснованого на паралактичному методі визначення координат, що відрізняється тим, що осі цифрових вимірювальних камер попередньо орієнтують в площині, яка паралельна площині YШOZ Ш одного з бортів шихтового відсіку; фотоприймальні матриці (ФПМ) цифрових камер орієнтують так, щоб лінії рядків (стовпців) знаходилися в площині паралельній XШOZ Ш і в горизонтальній площині, при цьому за допомогою камер в задані моменти часу фіксують відліки положення світлової відбитої міткиіндексу на поверхні шихти і визначають координати цієї поверхні в проекції на площинах YШOZ Ш і XШOYШ , зокрема висоти мітки-індексу отримують за формулою: h H 25 ' b sin 1 sin '2 , ' sin(180 1 '2 ) де H - висота горизонтальної лінії об'єктів в цифрових камерах над основою шихтового відсіку; b - горизонтальна база між цифровими камерами; ' 1, '2 - проекції кутів нахилу оптичних осей камер на площину YШOZ Ш ; ' ' ' 1 1 1 1 ; '2 '2 '2 2 ; ' 1, '2 - проекції вертикальних кутів нахилу контрольних ліній на площину YШOZ Ш ; 30 ' 1,'2 - проекції кутів між оптичними осями камер і контрольними візирними лініями; 1, 2 - відліки в кутовій мірі по стовпчиках фотоприймальних матриць камер; визначення координат світлової мітки-індексу по осях XШ і YШ виконують аналогічно по проекціях вищеописаних візирних ліній і робочих світлових променів на площині XШOYШ , 35 враховуючи звіти по рядках фотоприймальних матриць, зорієнтованих паралельно осі XШ , після чого за отриманими координатами світлової мітки-індексу на поверхні шихти XШ , YШ і i i перевищенням h формують цифрову модель шихтової поверхні і обчислюють об'єм шихти: n V x Шi y Шi hi V ' , i 1 де x Ш y Ш hi - об'єм елементарного паралелепіпеда з середньою висотою hi ; i i 40 45 50 V ' - об'єм частини шихтового відсіку за рахунок спотворення прямокутної форми в придонній зоні шихтового відсіку (визначається завчасно). Технічним результатом є підвищення точності вимірювань об'єму шихти в шихтовому відсіку. На фіг. 1 представлена блок-схема пристрою для реалізації запропонованого способу для варіанту застосування двох цифрових оптико-електронних камер. На схемі позначено: 1, 2 - цифрові оптико-електронні камери; 3 - блок обробки інформації та управління; 4 - формувач світлового індексу; 5 - об'єкт вимірювання - поверхня шихти; 6, 7 - блоки контрольних марок для контролю положення осей камер 1, 2 відповідно. 1 UA 103869 U 5 10 15 20 25 30 Цифрові камери1 і 2 встановлені на стійких стабільних стовпах, на висоті над поверхнею шихти, достатньої для охоплення полем зору камери цієї поверхні; оптичні осі камер 1, 2 орієнтують з нахилом у вертикальній площині XШOZ Ш (або YШOZ Ш ), де XШ і YШ горизонтальні осі опорної системи координат шихтового відсіку, паралельні площинам бортів відсіку, ZШ - вертикальна вісь системи. Блоки підсвічуються контрольних марок 6 і 7 встановлюють по лінії горизонту у вертикальній площині борту навпроти стовпа відповідної камери 1 (2). Блок 4 встановлюють на стовпі так, щоб забезпечити відображення світлового індексу при його переміщенні по всій поверхні шихти. Блок 3 встановлений в захищеному від зовнішнього середовища приміщенні і пов'язаний електричними зв'язками з блоками 1, 2, 4, 6, 7. Методика визначення обсягу шихти за запропонованим способом включає в себе вимір положення візирного світлового індексу на поверхні шихти за допомогою "п" цифрових оптикоелектронних камер, при цьому візирні осі цифрових камер орієнтують як мінімум в одній з площин загальної системи координат XШ, YШ, ZШ , утвореної обмежувальними площинами шихтового відсіку, так само як мінімум одну з відлікових осей (лінії стовпців (рядків) фотоприймальні матриці кожної камери орієнтують так само в одній з площин загальної системи координат, при цьому змінюють положення осі формування світового індексу з урахуванням охоплення всієї поверхні шихти і в задані моменти при переміщенні світлового індексу виконують одночасно в "п" камер експозиції, фіксуючи положення зображення світлового індексу на мішенях камер, за отриманими звітами до відомих координатах камер в загальній системі координат XШ, YШ, ZШ визначають проекції робочих світлових променів "індекс - камера" на відповідну площину системи координат ( XШOYШ, XШOZ Ш, YШOZ Ш ) і на перетині цих проекцій отримують шукану координату поверхні шихти, тобто на площинах XШOYШ, YШOZ Ш - координату висоти точки поверхні шихти (ZШ ) , на площині XШOYШ координати даної точки ( XШ, YШ ) , потім за отриманими даними і відомим даними про положення статі і бічних обмежувальних поверхнях шихтового відсіків визначають обсяг шихти. Робота пристрою за запропонованим способом виконується наступним чином. Світлове випромінювання блока 4 створює на поверхні шихти 5 світлову пляму (індекс); відбитий світловий потік від цього індексу потрапляє на об'єктиви камер 1 і 2, які формують зображення індексу відповідно на матрицях камер; при одночасній експозиції камер 1 і 2 отримують звіти з матриць: XK , YK і XK , YK . 1 35 40 45 50 1 2 2 На фіг. 2 показано розміщення елементів пристрою за запропонованим способом в шихтовому відсіку: 1, 2 - цифрові оптико-електронні камери; 4 - формувач світлового індексу; 5 - об'єкт вимірювання - поверхня шихти; 6, 7 - блоки контрольних марок для контролю положення осей камер 1, 2 відповідно; 8 - стовпи (штанги) для установки цифрових камер 1, 2 і випромінювача 4; 9 - кронштейни з механізмом сканування випромінювача 4; 10 - бортове обмеження шихтового відсіку. На фіг. 3 показана схема розміщення проекцій оптичних осей камер 1, 2 (1'-1", 2'-2") і проекції робочих світлових променів "індекс камера" (5'-1', 5'-2'), а також контрольних ліній "контрольна марка - камера" (6'-1' і 7'-2'). - 1' і 3' - проекції центрів об'єктивів камер 1 і 2 на вертикальну площину YШOZ Ш ; ' - вісь Z Ш - вертикальна вісь, паралельна осі ZШ , зміщена щодо осі ZШ по осі YШ на величину відстані між точками 1' і 2'; - 6', 7' - проекції випромінювачів блоків 6 і 7 на площину YШOZ Ш ; ' - 1, '2 - проекції кутів нахилу контрольних ліній 1'-6' і 2'-7' камер (1 і 2) на площину YШOZ Ш ; - в - горизонтальна база камер 1' 2'; - побудова та рішення трикутника 1' 2' 5'на площині YШOZ Ш дозволяє визначити висоту hi точки 5 на поверхні шихти. hi H Hi , (1) де H - висота об'єктива камери 1 (2) щодо дна шихтового відсіку (площині XШOYШ ); 2 UA 103869 U Hi - відстань по вертикалі від точки 5' до лінії горизонту в камер 1' і 2'; Hi ' b sin 1 sin '2 ' sin(180 1 '2 ) , (2) ' ' ' 1 1 1 1 ; (3) '2 '2 '2 2 , (4) 5 ' 1, '2 - проекції кутів нахилу робочих променів 5'-1' і 5'-2' відносно горизонтальної площини; 1, 2 - відліки в кутовій мірі за стовпцями ФПМ камер 1 і 2; 10 ' 1,'2 - проекції кутів між оптичними осями камер 1 і 2 і контрольних площин, утвореними блоками марок 6 і 7 і центрами об'єктивів камер 1 і 2. В результаті отримують в площині YШOZ Ш трикутник 2'3'4', в якому відомі всі кути. Висоту цього трикутника (відстань H ' ) отримують за формулою (2) і обчислюють перевищення hi точок 5i (i 1 n) за формулою (1). , 15 Визначення координат точок 5i по осях XШ і YШ виконують аналогічно по проекціях вищеописаних візирних ліній і робочих світлових променів на площині XШOYШ , враховуючи звіти по рядках фотоприймальних матриць, зорієнтованих паралельно осі XШ . За отриманими координатами точок 5i на поверхні шихти X Ш , YШ і перевищенням hi i i формують цифрову модель шихтової поверхні і обчислюють об'єм шихти: n V x Шi y Шi hi V ' , i 1 20 25 30 35 де x Ш y Ш hi - об'єм елементарного паралелепіпеда з середньою висотою hi ; i i V ' - об'єм за рахунок спотворення прямокутної форми в придонній зоні шихтового відсіку (визначається завчасно). Дані вимірювань з фотоприймальних камер 1, 2 надходять в блок 3, де виконуються всі обчислення, при цьому вводять поправки в кути за відхилення відліків з контрольних марок блоків 6 і 7 щодо номінальних. Управління випромінювачем блок 4 виконують за програмою з блока 3. Таким чином, запропонований спосіб дозволяє автоматизувати контроль обсягу шихти в шихтових відсіках, зробити його дистанційним, оперативним і точним, що вписується в автоматизований комплекс виробництва феросплавів. Джерела інформації: 1. Міжгалузева інструкція з визначення і контролю видобутку і розкриву на кар'єрах. Міністерство вугільної промисловості СРСР. Затв. Держтехнагляду СРСР від 10.08.1976 р. 2. Інструкція по виробництву маркшейдерських робіт. Міністерство вугільної промисловості СРСР. Затв. Держтехнагляду СРСР від 20.02.1985 р. 3. Баран П.І. Інженерна геодезія: Монографія / П.І. Баран. - К.: ПАТ "ВІПОЛ". - 2012. - 618 с. 4. Левчук Г.П., Новак B.C., Конусов В.Г. Прикладна геодезія основні методи і принципи інженерно-геодезичних робіт. М. "Надра" 1981 р. 5. Войтенко С.П. Інженерна геодезія: підручник. К.: Знання 2009 p. - 557с. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Спосіб дистанційного контролю об'єму шихти в шихтовому відсіку, заснований на паралактичному методі визначення координат, який відрізняється тим, що осі цифрових вимірювальних камер попередньо орієнтують в площині, яка паралельна площині YШOZ Ш одного з бортів шихтового відсіку; фотоприймальні матриці (ФПМ) цифрових камер орієнтують 3 UA 103869 U 5 так, щоб лінії рядків (стовпців) знаходилися в площині паралельній XШOZ Ш і в горизонтальній площині, при цьому за допомогою камер в задані моменти часу фіксують відліки положення світлової відбитої мітки-індексу на поверхні шихти і визначають координати цієї поверхні в проекції на площинах YШOZ Ш і XШOYШ , зокрема висоти мітки-індексу отримують за формулою: h H ' b sin 1 sin '2 ' sin(180 1 '2 ) , де H - висота горизонтальної лінії об'єктів в цифрових камерах над основою шихтового відсіку; b - горизонтальна база між цифровими камерами; ' 1, '2 - проекції кутів нахилу оптичних осей камер на площину YШOZ Ш ; 10 ' ' ' 1 1 1 1 ; '2 '2 '2 2 ; ' 1, '2 - проекції вертикальних кутів нахилу контрольних ліній на площину YШOZ Ш ; ' 1, '2 - проекції кутів між оптичними осями камер і контрольними візирними лініями; 15 1, 2 - відліки в кутовій мірі по стовпчиках фотоприймальних матриць камер; визначення координат світлової мітки-індексу по осях XШ і YШ виконують аналогічно по проекціях вищеописаних візирних ліній і робочих світлових променів на площині XШOYШ , враховуючи звіти по рядках фотоприймальних матриць, зорієнтованих паралельно осі XШ , після чого за отриманими координатами світлової відбитої мітки-індексу на поверхні шихти X Шi , YШi і перевищенням h формують цифрову модель шихтової поверхні і обчислюють об'єм 20 шихти: V n x Ш y Ш hi V ' , i 1 i i де x Шi y Шi hi - об'єм елементарного паралелепіпеда з середньою висотою hi ; V ' - об'єм частини шихтового відсіку за рахунок спотворення прямокутної форми в придонній зоні шихтового відсіку (визначається завчасно). 4 UA 103869 U 5 UA 103869 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01F 17/00, G01F 23/00
Мітки: шихтовому, відсіку, спосіб, шихти, контролю, дистанційного, об'єму
Код посилання
<a href="https://ua.patents.su/8-103869-sposib-distancijjnogo-kontrolyu-obehmu-shikhti-v-shikhtovomu-vidsiku.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного контролю об’єму шихти в шихтовому відсіку</a>
Пристрій контролю рівня засипки шихти у доменну піч
Номер патенту: 70268
Опубліковано: 10.04.2007
Автори: Дударенко Андрій Анатолійович, Шишканов Сергій Юрійович, Листопадов Владислав Станіславович, Коливашко Олександра Олександрівна, Кукушкін Олег Миколайович, Гітлін Лев Давидович, Бичков Сергій Васильович, Головко Вячеслав Ілліч, Михайловський Микола Володимирович
МПК: G01F 23/28, G01F 23/284, C21B 7/24
Мітки: піч, засипки, рівня, шихти, доменну, контролю, пристрій
Формула / Реферат:
Пристрій контролю рівня засипки шихти у доменну піч, який містить трубу та ізолюючий корпус, які з'єднані між собою за допомогою фланців, радіолокатор, який встановлено в ізолюючий корпус, радіопрозорий екран, що розташований перед радіолокатором, та засіб подання газу під радіопрозорий екран, причому засіб подання газу виконаний у вигляді порожнистого кільця, оснащеного патрубком підводу та отворами для відводу цього газу, і встановлений між...
Пристрій контролю рівня засипки шихти до доменної печі

Номер патенту: 70268
Опубліковано: 15.09.2004
Автори: Дударенко Андрій Анатолійович, Михайловський Микола Володимирович, Коливашко Олександра Олександрівна, Листопадов Владислав Станіславович, Шишканов Сергій Юрійович, Гітлін Лев Давидович, Кукушкін Олег Миколайович, Бичков Сергій Васильович, Головко Вячеслав Ілліч
МПК: C21B 7/20
Мітки: засипки, рівня, печі, доменної, контролю, пристрій, шихти
Формула / Реферат:
Пристрій контролю рівня засипки шихти у доменну піч, який містить трубу та ізолюючий корпус, які з'єднані між собою за допомогою фланців, радіолокатор, який встановлено в ізолюючий корпус, радіопрозорий екран, що розташований перед радіолокатором, та засіб подання газу під радіопрозорий екран, причому засіб подання газу виконаний у вигляді порожнистого кільця, оснащеного патрубком підводу та отворами для відводу цього газу, і встановлений між...
Спосіб дистанційного електронного контролю за місцезнаходженням і переміщенням об’єктів
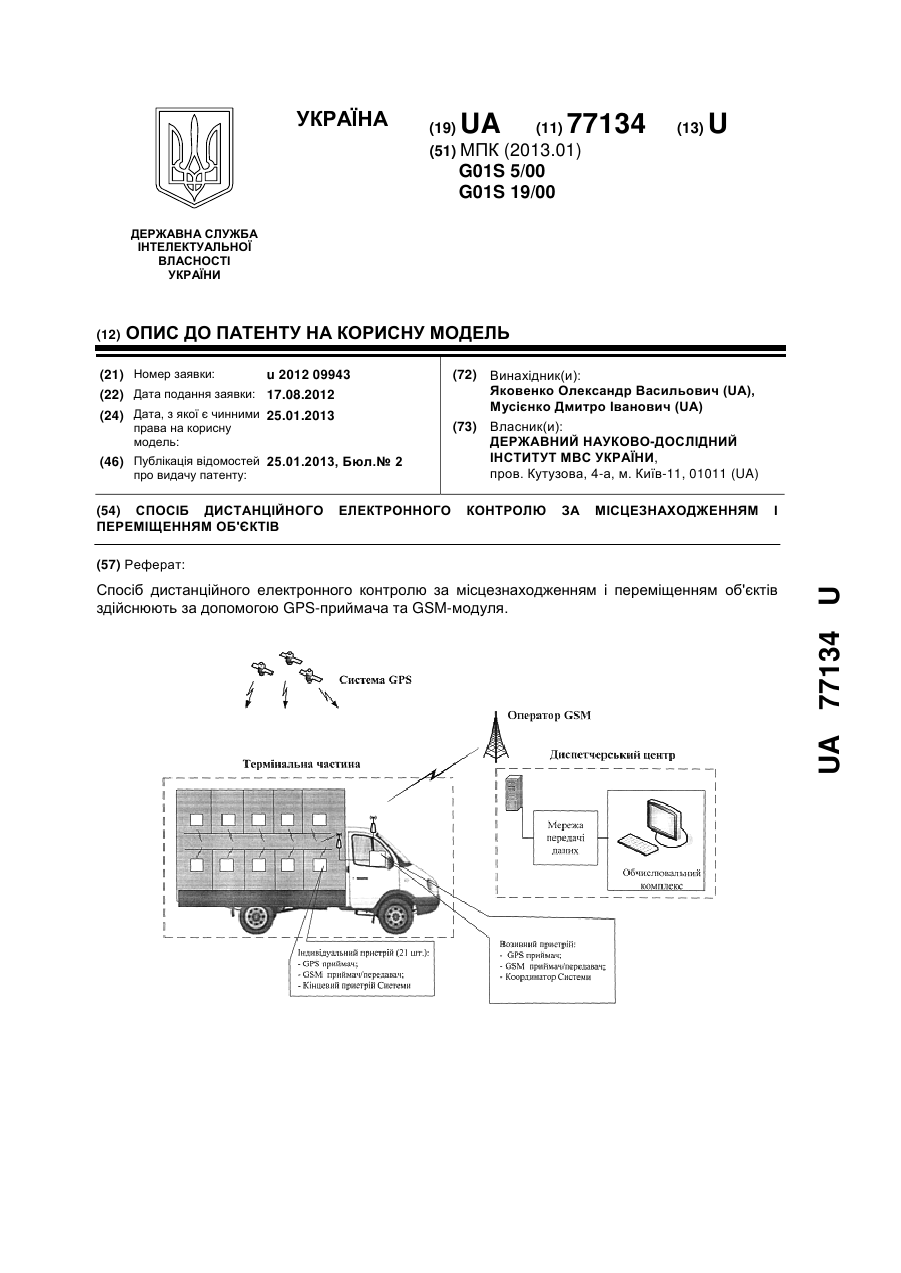
Номер патенту: 77134
Опубліковано: 25.01.2013
Автори: Мусієнко Дмитро Іванович, Яковенко Олександр Васильович
МПК: G01S 19/00, G01S 5/00
Мітки: спосіб, дистанційного, місцезнаходженням, електронного, переміщенням, об'єктів, контролю
Формула / Реферат:
1. Спосіб дистанційного електронного контролю за місцезнаходженням і переміщенням об'єктів, який полягає в тому, що, при розташуванні рухомого об'єкта в транспортному засобі, дані про наявність об'єкта в транспортному засобі, цілісність кріплення й стан акумуляторної батареї індивідуального пристрою надходять з індивідуального пристрою до викличного пристрою, потім до контролера викличного пристрою, викличний пристрій за допомогою...
Система та спосіб дистанційного електронного контролю за місцезнаходженням і переміщенням об’єктів
Номер патенту: 67763
Опубліковано: 12.03.2012
Автори: Мусієнко Дмитро Іванович, Яковенко Олександр Васильович
МПК: G01V 15/00, G08B 21/00
Мітки: дистанційного, спосіб, місцезнаходженням, система, об'єктів, контролю, переміщенням, електронного
Формула / Реферат:
1. Спосіб дистанційного електронного контролю за місцезнаходженням і переміщенням об'єктів, який полягає в тому, що дані передають з індивідуального пристрою, який закріплено на об'єкті, до сервера даних за допомогою безпроводового способу передачі даних, який відрізняється тим, що, при розташуванні рухомого об'єкта в транспортному засобі, дані про наявність об'єкта в транспортному засобі, цілісність кріплення й стан акумуляторної батареї...
Спосіб дистанційного контролю зусиль натягу армоканатів захисних оболонок енергоблоків атомних електростанцій
Номер патенту: 35844
Опубліковано: 16.04.2001
Автори: Абарбарчук Ігор Азарович, Нікітінський Михайло Павлович
МПК: G01L 1/22
Мітки: атомних, спосіб, натягу, армоканатів, енергоблоків, електростанцій, оболонок, контролю, захисних, дистанційного, зусиль
Формула / Реферат:
Спосіб дистанційного контролю зусиль натягу армоканатів захисних оболонок енергоблоків атомних електростанцій, при якому за допомогою механізму силовведення створюють необхідні зусилля для впливу на силовимірювальні датчики, які визначають зусилля натягу армоканатів, порівнюють їх показання з показаннями зразкових засобів вимірювань, який відрізняється тим, що механізмом силовведення (домкратом) створюють певний натяг окремого армоканата,...
Попередній патент: Спосіб сульфування довголанцюгових алкілбензолів
Наступний патент: Композиція для антикорозійних покриттів
Випадковий патент: Спосіб обробки розплаву металу