Система керування кувальним молотом
Номер патенту: 103951
Опубліковано: 12.01.2016
Автори: Протиняк Ігор Стефанович, Реука Сергій Миколайович, Бірюк Денис Михайлович, Мордовін Олексій Олександрович
Формула / Реферат
1. Система керування кувальним молотом, що включає клапани керування робочим циліндром, замковий клапан, пневморозподільники клапанів керування робочим циліндром і замкового клапана відповідно, що зв'язані між собою за допомогою пневматичних магістралей, і привід регулювання енергії удару, яка відрізняється тим, що система керування кувальним молотом додатково забезпечена двоплечим важелем, кінці якого кінематично зв'язані з штоками клапанів керування робочим циліндром, а привід регулювання енергії удару виконаний у вигляді двох вертикальних гідроциліндрів, забезпечених гідросистемою і апаратурою керування гідроциліндрами, при цьому штоки гідроциліндрів взаємодіють з кінцями двоплечого важеля.
2. Система керування кувальним молотом за п. 1, яка відрізняється тим, що штоки гідроциліндрів приводу регулювання енергії удару додатково забезпечені датчиками лінійних переміщень.
Текст
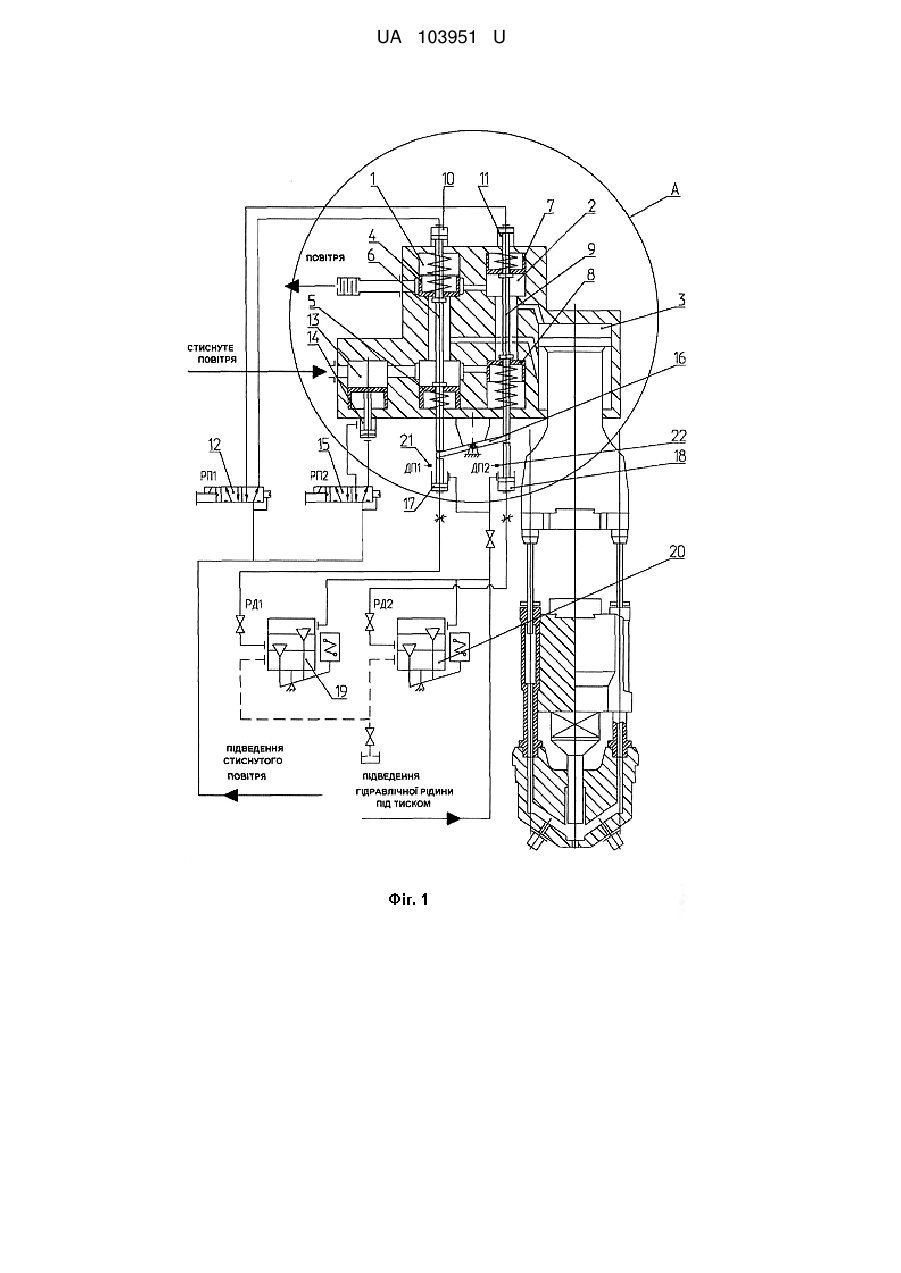
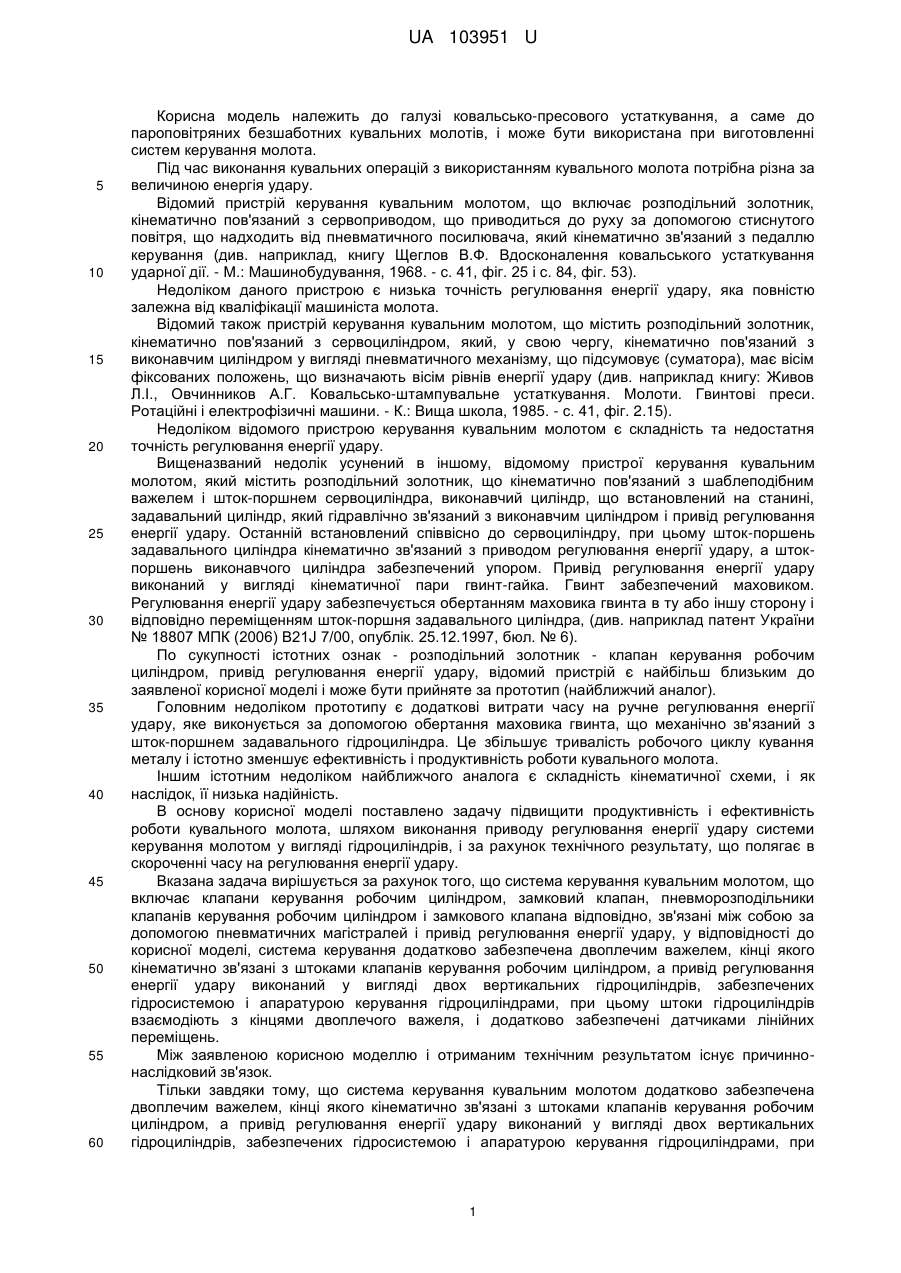
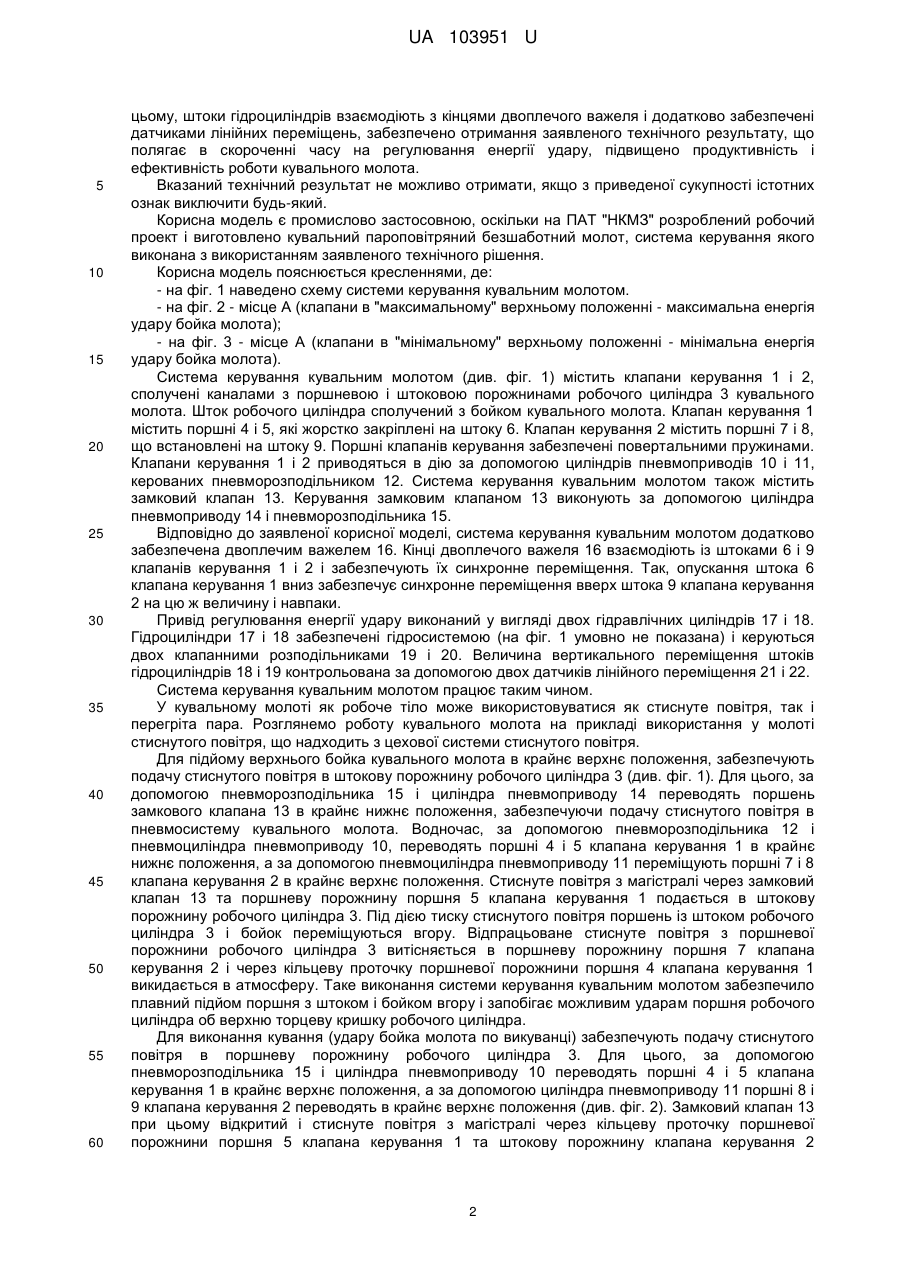
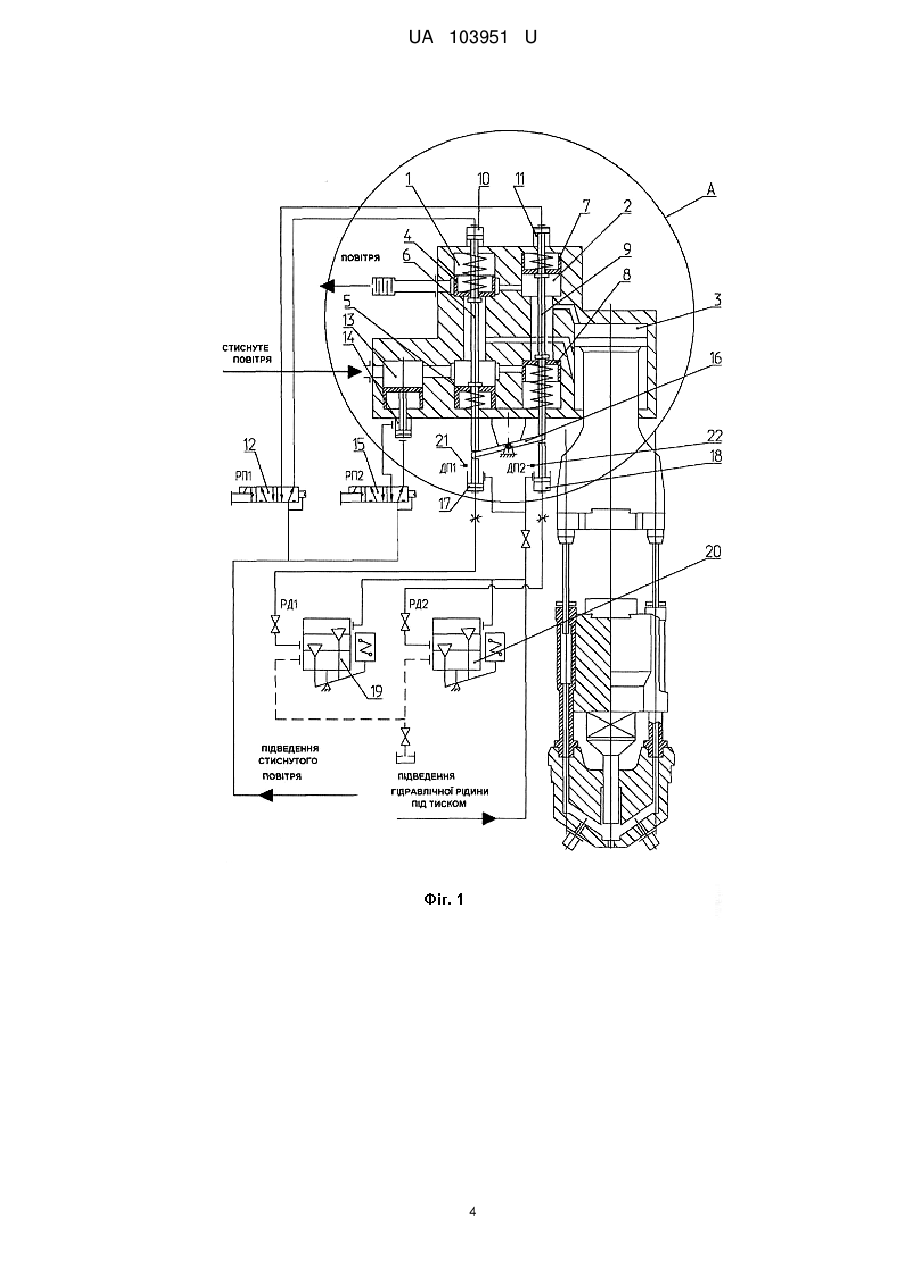
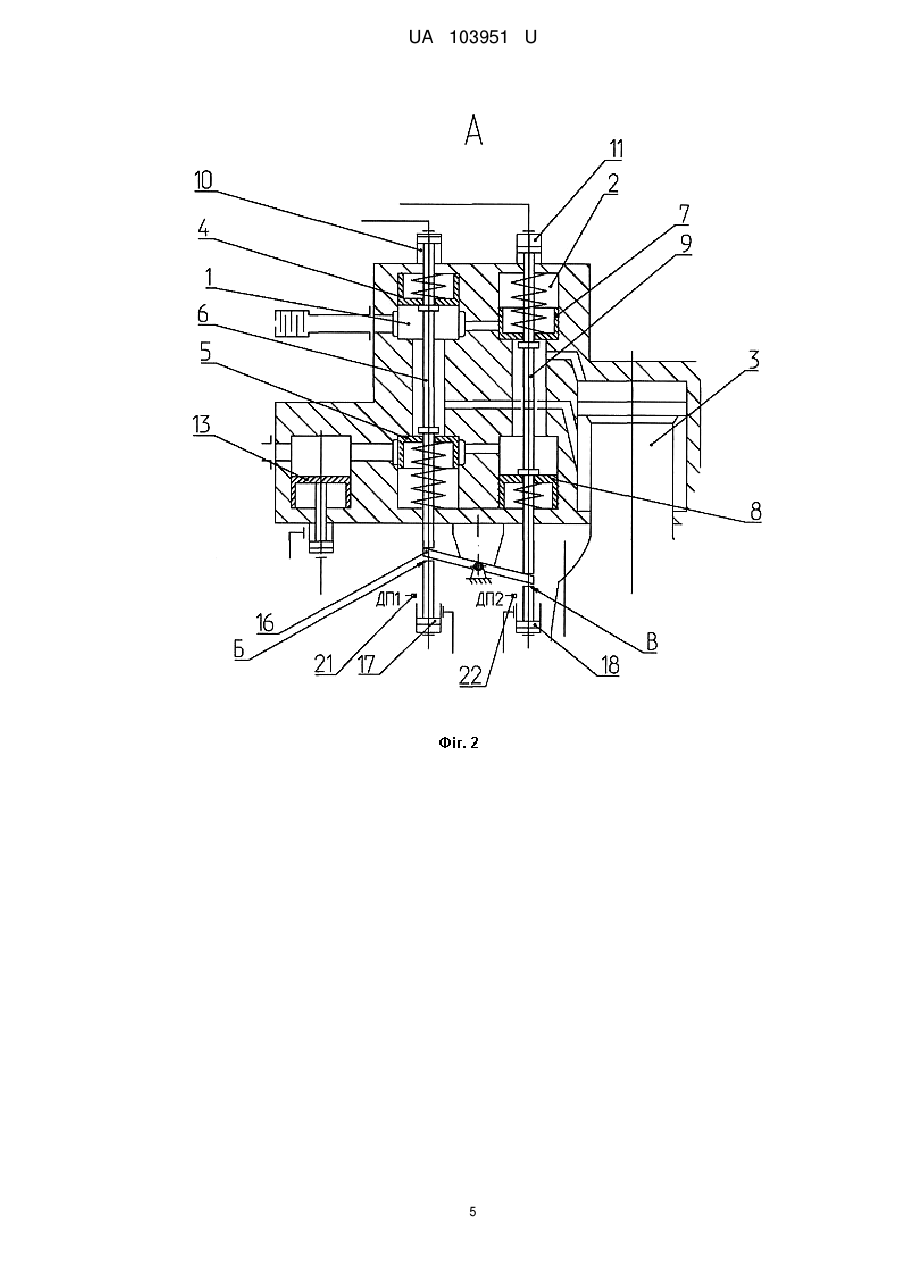
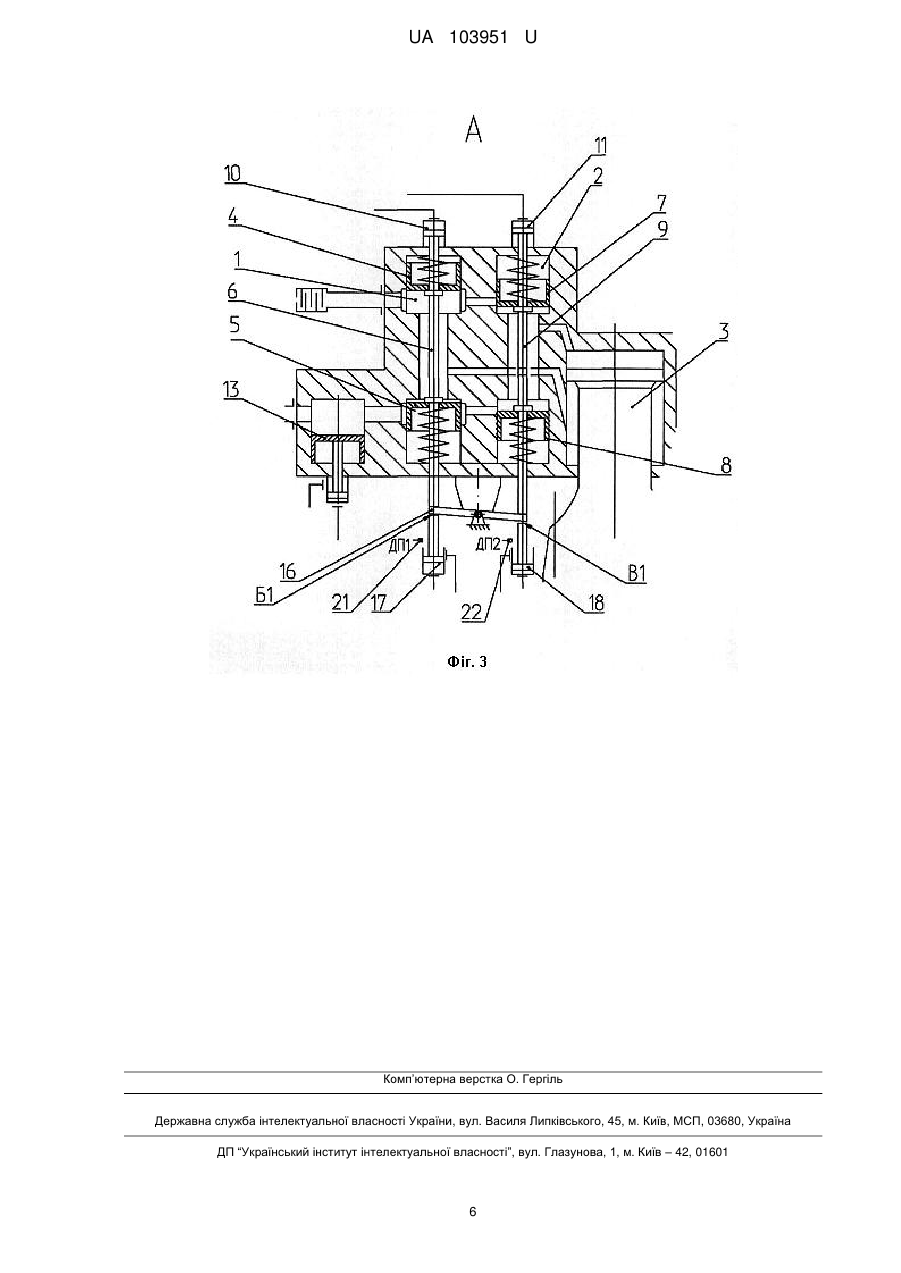
Реферат: Система керування кувальним молотом включає клапани керування робочим циліндром, замковий клапан, пневморозподільники клапанів керування робочим циліндром і замкового клапана відповідно, що зв'язані між собою за допомогою пневматичних магістралей, і привід регулювання енергії удару. Система керування кувальним молотом додатково забезпечена двоплечим важелем, кінці якого кінематично зв'язані з штоками клапанів керування робочим циліндром. Привід регулювання енергії удару виконаний у вигляді двох вертикальних гідроциліндрів, забезпечених гідросистемою і апаратурою керування гідроциліндрами. Штоки гідроциліндрів взаємодіють з кінцями двоплечого важеля. UA 103951 U (54) СИСТЕМА КЕРУВАННЯ КУВАЛЬНИМ МОЛОТОМ UA 103951 U UA 103951 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі ковальсько-пресового устаткування, а саме до пароповітряних безшаботних кувальних молотів, і може бути використана при виготовленні систем керування молота. Під час виконання кувальних операцій з використанням кувального молота потрібна різна за величиною енергія удару. Відомий пристрій керування кувальним молотом, що включає розподільний золотник, кінематично пов'язаний з сервоприводом, що приводиться до руху за допомогою стиснутого повітря, що надходить від пневматичного посилювача, який кінематично зв'язаний з педаллю керування (див. наприклад, книгу Щеглов В.Ф. Вдосконалення ковальського устаткування ударної дії. - М.: Машинобудування, 1968. - с. 41, фіг. 25 і с. 84, фіг. 53). Недоліком даного пристрою є низька точність регулювання енергії удару, яка повністю залежна від кваліфікації машиніста молота. Відомий також пристрій керування кувальним молотом, що містить розподільний золотник, кінематично пов'язаний з сервоциліндром, який, у свою чергу, кінематично пов'язаний з виконавчим циліндром у вигляді пневматичного механізму, що підсумовує (суматора), має вісім фіксованих положень, що визначають вісім рівнів енергії удару (див. наприклад книгу: Живов Л.І., Овчинников А.Г. Ковальсько-штампувальне устаткування. Молоти. Гвинтові преси. Ротаційні і електрофізичні машини. - К.: Вища школа, 1985. - с. 41, фіг. 2.15). Недоліком відомого пристрою керування кувальним молотом є складність та недостатня точність регулювання енергії удару. Вищеназваний недолік усунений в іншому, відомому пристрої керування кувальним молотом, який містить розподільний золотник, що кінематично пов'язаний з шаблеподібним важелем і шток-поршнем сервоциліндра, виконавчий циліндр, що встановлений на станині, задавальний циліндр, який гідравлічно зв'язаний з виконавчим циліндром і привід регулювання енергії удару. Останній встановлений співвісно до сервоциліндру, при цьому шток-поршень задавального циліндра кінематично зв'язаний з приводом регулювання енергії удару, а штокпоршень виконавчого циліндра забезпечений упором. Привід регулювання енергії удару виконаний у вигляді кінематичної пари гвинт-гайка. Гвинт забезпечений маховиком. Регулювання енергії удару забезпечується обертанням маховика гвинта в ту або іншу сторону і відповідно переміщенням шток-поршня задавального циліндра, (див. наприклад патент України № 18807 МПК (2006) В21J 7/00, опублік. 25.12.1997, бюл. № 6). По сукупності істотних ознак - розподільний золотник - клапан керування робочим циліндром, привід регулювання енергії удару, відомий пристрій є найбільш близьким до заявленої корисної моделі і може бути прийняте за прототип (найближчий аналог). Головним недоліком прототипу є додаткові витрати часу на ручне регулювання енергії удару, яке виконується за допомогою обертання маховика гвинта, що механічно зв'язаний з шток-поршнем задавального гідроциліндра. Це збільшує тривалість робочого циклу кування металу і істотно зменшує ефективність і продуктивність роботи кувального молота. Іншим істотним недоліком найближчого аналога є складність кінематичної схеми, і як наслідок, її низька надійність. В основу корисної моделі поставлено задачу підвищити продуктивність і ефективність роботи кувального молота, шляхом виконання приводу регулювання енергії удару системи керування молотом у вигляді гідроциліндрів, і за рахунок технічного результату, що полягає в скороченні часу на регулювання енергії удару. Вказана задача вирішується за рахунок того, що система керування кувальним молотом, що включає клапани керування робочим циліндром, замковий клапан, пневморозподільники клапанів керування робочим циліндром і замкового клапана відповідно, зв'язані між собою за допомогою пневматичних магістралей і привід регулювання енергії удару, у відповідності до корисної моделі, система керування додатково забезпечена двоплечим важелем, кінці якого кінематично зв'язані з штоками клапанів керування робочим циліндром, а привід регулювання енергії удару виконаний у вигляді двох вертикальних гідроциліндрів, забезпечених гідросистемою і апаратурою керування гідроциліндрами, при цьому штоки гідроциліндрів взаємодіють з кінцями двоплечого важеля, і додатково забезпечені датчиками лінійних переміщень. Між заявленою корисною моделлю і отриманим технічним результатом існує причиннонаслідковий зв'язок. Тільки завдяки тому, що система керування кувальним молотом додатково забезпечена двоплечим важелем, кінці якого кінематично зв'язані з штоками клапанів керування робочим циліндром, а привід регулювання енергії удару виконаний у вигляді двох вертикальних гідроциліндрів, забезпечених гідросистемою і апаратурою керування гідроциліндрами, при 1 UA 103951 U 5 10 15 20 25 30 35 40 45 50 55 60 цьому, штоки гідроциліндрів взаємодіють з кінцями двоплечого важеля і додатково забезпечені датчиками лінійних переміщень, забезпечено отримання заявленого технічного результату, що полягає в скороченні часу на регулювання енергії удару, підвищено продуктивність і ефективність роботи кувального молота. Вказаний технічний результат не можливо отримати, якщо з приведеної сукупності істотних ознак виключити будь-який. Корисна модель є промислово застосовною, оскільки на ПАТ "НКМЗ" розроблений робочий проект і виготовлено кувальний пароповітряний безшаботний молот, система керування якого виконана з використанням заявленого технічного рішення. Корисна модель пояснюється кресленнями, де: - на фіг. 1 наведено схему системи керування кувальним молотом. - на фіг. 2 - місце А (клапани в "максимальному" верхньому положенні - максимальна енергія удару бойка молота); - на фіг. 3 - місце А (клапани в "мінімальному" верхньому положенні - мінімальна енергія удару бойка молота). Система керування кувальним молотом (див. фіг. 1) містить клапани керування 1 і 2, сполучені каналами з поршневою і штоковою порожнинами робочого циліндра 3 кувального молота. Шток робочого циліндра сполучений з бойком кувального молота. Клапан керування 1 містить поршні 4 і 5, які жорстко закріплені на штоку 6. Клапан керування 2 містить поршні 7 і 8, що встановлені на штоку 9. Поршні клапанів керування забезпечені повертальними пружинами. Клапани керування 1 і 2 приводяться в дію за допомогою циліндрів пневмоприводів 10 і 11, керованих пневморозподільником 12. Система керування кувальним молотом також містить замковий клапан 13. Керування замковим клапаном 13 виконують за допомогою циліндра пневмоприводу 14 і пневморозподільника 15. Відповідно до заявленої корисної моделі, система керування кувальним молотом додатково забезпечена двоплечим важелем 16. Кінці двоплечого важеля 16 взаємодіють із штоками 6 і 9 клапанів керування 1 і 2 і забезпечують їх синхронне переміщення. Так, опускання штока 6 клапана керування 1 вниз забезпечує синхронне переміщення вверх штока 9 клапана керування 2 на цю ж величину і навпаки. Привід регулювання енергії удару виконаний у вигляді двох гідравлічних циліндрів 17 і 18. Гідроциліндри 17 і 18 забезпечені гідросистемою (на фіг. 1 умовно не показана) і керуються двох клапанними розподільниками 19 і 20. Величина вертикального переміщення штоків гідроциліндрів 18 і 19 контрольована за допомогою двох датчиків лінійного переміщення 21 і 22. Система керування кувальним молотом працює таким чином. У кувальному молоті як робоче тіло може використовуватися як стиснуте повітря, так і перегріта пара. Розглянемо роботу кувального молота на прикладі використання у молоті стиснутого повітря, що надходить з цехової системи стиснутого повітря. Для підйому верхнього бойка кувального молота в крайнє верхнє положення, забезпечують подачу стиснутого повітря в штокову порожнину робочого циліндра 3 (див. фіг. 1). Для цього, за допомогою пневморозподільника 15 і циліндра пневмоприводу 14 переводять поршень замкового клапана 13 в крайнє нижнє положення, забезпечуючи подачу стиснутого повітря в пневмосистему кувального молота. Водночас, за допомогою пневморозподільника 12 і пневмоциліндра пневмоприводу 10, переводять поршні 4 і 5 клапана керування 1 в крайнє нижнє положення, а за допомогою пневмоциліндра пневмоприводу 11 переміщують поршні 7 і 8 клапана керування 2 в крайнє верхнє положення. Стиснуте повітря з магістралі через замковий клапан 13 та поршневу порожнину поршня 5 клапана керування 1 подається в штокову порожнину робочого циліндра 3. Під дією тиску стиснутого повітря поршень із штоком робочого циліндра 3 і бойок переміщуються вгору. Відпрацьоване стиснуте повітря з поршневої порожнини робочого циліндра 3 витісняється в поршневу порожнину поршня 7 клапана керування 2 і через кільцеву проточку поршневої порожнини поршня 4 клапана керування 1 викидається в атмосферу. Таке виконання системи керування кувальним молотом забезпечило плавний підйом поршня з штоком і бойком вгору і запобігає можливим ударам поршня робочого циліндра об верхню торцеву кришку робочого циліндра. Для виконання кування (удару бойка молота по викуванці) забезпечують подачу стиснутого повітря в поршневу порожнину робочого циліндра 3. Для цього, за допомогою пневморозподільника 15 і циліндра пневмоприводу 10 переводять поршні 4 і 5 клапана керування 1 в крайнє верхнє положення, а за допомогою циліндра пневмоприводу 11 поршні 8 і 9 клапана керування 2 переводять в крайнє верхнє положення (див. фіг. 2). Замковий клапан 13 при цьому відкритий і стиснуте повітря з магістралі через кільцеву проточку поршневої порожнини поршня 5 клапана керування 1 та штокову порожнину клапана керування 2 2 UA 103951 U 5 10 15 20 25 30 35 40 45 подається в поршневу порожнину робочого циліндра 3. Під дією тиску стиснутого повітря поршень з штоком робочого циліндра 3 і верхнім бойком рухаються вниз, забезпечуючи удар робочої поверхні бойок по виковці. Відпрацьоване стиснуте повітря, що витісняється з штокової порожнини робочого циліндра 3 через штокову порожнину і поршневу порожнину поршня 4 клапана керування 1 вільно викидається в атмосферу. Таким чином забезпечений удар бойка кувального молота по виковці. Регулювання енергії удару бойка здійснюють за рахунок зменшення об'єму подачі стиснутого повітря в поршневу порожнину робочого циліндра 3, шляхом обмеження величини вертикального переміщення штоків 6 і 9 і поршнів 4, 5, 7 і 8 клапанів керування 1 і 2, а саме за допомогою висунення штоків гідроциліндрів 17 і 18 на необхідну величину (висоту). Так, в режимі "Робочий хід з максимальною енергією удару бойка" (див. фіг. 2) шток гідроциліндра 17 під клапаном керування 1 максимально висунутий (торець штока гідроциліндра знаходиться в положенні "Б"), шток гідроциліндра 18 максимально засунутий (торець штока знаходиться в положенні "В"). За допомогою пневмоприводів 10 і 11 шток 6 і поршні 4 і 5, шток 9 і поршні 7 і 8 клапанів керування 1 і 2 переміщають вниз до упору в штоки гідроциліндрів 17 і 18 відповідно. Водночас відбувається повертання двоплечого важеля на відповідний кут, що забезпечує синхронність переміщення вищезгаданих штоків і поршнів. Таким чином, шток 6 і поршні 4 і 5 клапана керування 1 в кінці робочого ходу знаходяться в максимально верхньому положенні, а шток 9 і поршні 7 і 8 клапана керування 2 знаходяться в крайньому нижньому положенні. У цьому положенні штокова порожнина поршня 8 має максимальний об'єм і забезпечує максимальну подачу стиснутого повітря в поршневу порожнину робочого циліндра 3. Таке положення елементів клапанів керування 1 і 2 забезпечує виконання удару бойка молота по виковці максимальною енергією удару. У режимі "Робочий хід з мінімальною енергією удару бойка" (див. фіг. 3) шток гідроциліндра 17 встановлюють в положення "Б1", а шток гідроциліндра 18 в положення "В1". За допомогою пневмоприводів 10 і 11 шток 6 і поршні 4 і 5, шток 9 і поршні 7 і 8 клапанів керування 1 і 2 переміщуються вниз до упору в штоки гідроциліндрів 17 і 18 (на мінімальну величину) і займають положення вказане на фіг. 3. Штокова порожнина поршня 8 клапана керування 2 має мінімальний об'єм і відповідно забезпечує подачу мінімального об'єму стиснутого повітря в поршневу порожнину робочого циліндра 3. Таке положення елементів клапанів керування 1 і 2 забезпечують подачу мінімального об'єму стиснутого повітря в поршневу порожнину робочого циліндра і мінімальну енергію удару бойок молота по поковці. Проміжні значення енергії удару бойка молота по поковці регулюють ступенем висуненнязасунення штоків гідроциліндрів 17 і 18, які приводяться в дію за допомогою двоклапанних гідророзподільників 19 і 20 відповідно. Контроль положення штоків гідроциліндрів 17 і 18 здійснюється за допомогою датчиків лінійних переміщень 21 і 22. Як випливає з опису роботи, конструктивне виконання системи керування пневматичним молотом відповідно до заявленої корисної моделі, забезпечило скорочення часу на регулювання енергії удару, і як наслідок, скорочення часу робочого циклу кування, підвищило ефективність і продуктивність роботи кувального молота. Крім того, виконання системи керування кувальним молотом відповідно до заявленої корисної моделі забезпечило отримання додаткового корисного результату, що полягає в збільшенні точності і плавності регулювання величини енергії удару, а також дозволило виконувати регулювання енергії удару бойка кувального молота в автоматичному режимі. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 1. Система керування кувальним молотом, що включає клапани керування робочим циліндром, замковий клапан, пневморозподільники клапанів керування робочим циліндром і замкового клапана відповідно, що зв'язані між собою за допомогою пневматичних магістралей, і привід регулювання енергії удару, яка відрізняється тим, що система керування кувальним молотом додатково забезпечена двоплечим важелем, кінці якого кінематично зв'язані з штоками клапанів керування робочим циліндром, а привід регулювання енергії удару виконаний у вигляді двох вертикальних гідроциліндрів, забезпечених гідросистемою і апаратурою керування гідроциліндрами, при цьому штоки гідроциліндрів взаємодіють з кінцями двоплечого важеля. 2. Система керування кувальним молотом за п. 1, яка відрізняється тим, що штоки гідроциліндрів приводу регулювання енергії удару додатково забезпечені датчиками лінійних переміщень. 3 UA 103951 U 4 UA 103951 U 5 UA 103951 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B21J 7/24
Мітки: кувальним, керування, система, молотом
Код посилання
<a href="https://ua.patents.su/8-103951-sistema-keruvannya-kuvalnim-molotom.html" target="_blank" rel="follow" title="База патентів України">Система керування кувальним молотом</a>
Пристрій керування штампувальним молотом
Номер патенту: 43648
Опубліковано: 25.08.2009
Автори: Гузнін Олександр Анатолійович, Попівненко Леонід Володимирович
МПК: B01J 7/00
Мітки: пристрій, керування, штампувальним, молотом
Формула / Реферат:
Пристрій керування штампувальним молотом, що містить розподільний золотник, який кінематично зв'язаний із шаблеподібним важелем і шток-поршнем пневматичного циліндра, корпус якого з'єднаний з виконавчим циліндром, що встановлений шарнірно на станині молота, який відрізняється тим, що керуючий вплив на шток виконавчого циліндра передається від гвинтового механізму, встановленого на раму, механічним шляхом за допомогою набору куль, які...
Система керування гідравлічним кувальним пресом
Номер патенту: 37183
Опубліковано: 25.11.2008
Автори: Трембач Юрій Миколайович, Іванов Антон Ігоревич, Шевченко Микола Іванович, Забабурин Олексій Леонідович, Михайлов Микола Олексійович, Попов Микола Миколайович, Смородинський Генріх Юхимович
МПК: B30B 15/16
Мітки: пресом, гідравлічним, система, керування, кувальним
Формула / Реферат:
1. Система керування гідравлічним кувальним пресом, що містить розподільну апаратуру, яка з'єднує робочі і піднімальні циліндри з джерелом високого тиску, і наповнювальні клапани з сервоциліндрами і розподільними пристроями, що сполучають робочі циліндри з джерелом низького тиску, яка відрізняється тим, що штоки сервоциліндрів оснащено жорстким зв'язком з взаємодіючими з ними в осьовому напрямі наповнювальними клапанами, які забезпечені...
Система керування гідравлічним кувальним пресом
Номер патенту: 5560
Опубліковано: 15.03.2005
Автори: Волошин Олексій Іванович, Граматний Віктор Михайлович, Трембач Юрій Миколайович, Смородинський Генріх Юхимович, Шевченко Микола Іванович
МПК: B30B 15/16
Мітки: пресом, кувальним, керування, гідравлічним, система
Формула / Реферат:
Система керування гідравлічним кувальним пресом, що включає розподільну апаратуру, яка зв'язує робочі і зворотні циліндри з джерелом високого тиску і наповнюючі клапани із сервоциліндрами, що з'єднують робочі циліндри з джерелом низького тиску, при цьому розподільна апаратура виконана з двома індивідуально керованими двоклапанними розподільниками вибору ступеня зусилля і розподільником вибору режиму, причому розподільники вибору ступеня...
Золотник системи керування пароповітряним молотом
Номер патенту: 51910
Опубліковано: 10.08.2010
Автори: Рудченко Олександр Сергійович, Роганов Максим Львович, Роганов Лев Леонідович
МПК: F15B 15/00
Мітки: керування, золотник, системі, молотом, пароповітряним
Формула / Реферат:
Золотник системи керування пароповітряним молотом, що містить корпус, в якому встановлена скалка, на якій розміщені кришки та гайка, а зовні корпусу встановлені кільця, який відрізняється тим, що в корпусі золотника встановлені додаткові конічні кільця регулювання зазору між золотником та золотниковою втулкою.
Пристрій керування молотом
Номер патенту: 18807
Опубліковано: 25.12.1997
Автори: Карпенко Юрій Олександрович, Рубанов Анатолій Іванович, Бугайов Сергій Павлович
МПК: B21J 7/00
Мітки: молотом, пристрій, керування
Формула / Реферат:
1. Устройство управления молотом, содержащее распределительный золотник, кинематически связанный с саблеобразным рычагом и шток-поршнем сервоцилиндра, исполнительный цилиндр, установленный на станине и привод регулирования энергии удара, отличающееся тем, что оно снабжено задающим цилиндром, гидравлически связанным с исполнительным цилиндром, последний установлен соосно сервоцилиндру, при этом шток-поршень задающего цилиндра кинематически...
Попередній патент: Фреза торцева
Наступний патент: Запобіжний клапан прямої дії на основі матеріалу з ефектом пам’яті форми
Випадковий патент: Трясильна машина