Центрифуга періодичної дії з регулювання кількості наповнювача і спосіб управління роботою зазначеної центрифуги
Номер патенту: 104326
Опубліковано: 27.01.2014
Автори: Янссен Віктор, Телен Міхель, Сонненбург Райнхард, Нойен Домінік

Формула / Реферат
1. Центрифуга періодичної дії, що призначена для поділу твердої і рідкої фаз в суспензії кристалів і містить барабан (2), вісь (3) обертання якого збігається з віссю симетрії циліндричної стінки (7) барабана (2) центрифуги і проходить вертикально, причому передбачена можливість заповнення барабана (2) центрифуги заданою кількістю суспензії кристалів як наповнювача (9), причому центрифуга містить датчик (15) вимірювання відстані, який виконує вимірювання безупинно і розташований усередині барабана (2) центрифуги, незмінно за межами наповнювача (9), причому вказаний датчик (15) вимірює відстань (А1-А4) до вільної поверхні (10-13) наповнювача (9) в площині (17) вимірювання, обертально-симетричної щодо осі (3) обертання і, по суті, перпендикулярний осі (3) обертання, причому центрифуга містить керуючий пристрій, виконаний з можливістю задання і регулювання кількості наповнювача для подальшого заповнення барабана центрифуги залежно від відстані (А1-А4).
2. Центрифуга за п. 1, яка відрізняється тим, що площина (17) вимірювання є площиною, що проходить перпендикулярно осі (3) обертання.
3. Центрифуга за п. 1 або 2, яка відрізняється тим, що датчик (15) вимірювання відстані виконаний у вигляді ультразвукового датчика, що вимірює відстань (А1-А4) з використанням ультразвуку.
4. Центрифуга за будь-яким з пп. 1-3, яка відрізняється тим, що датчик (15) вимірювання відстані нерухомий щодо осі (3) обертання, а також щодо обертання барабана (2) центрифуги, або обертається разом з барабаном (2) центрифуги під час роботи центрифуги (1).
5. Центрифуга за будь-яким з пп. 1-4, яка відрізняється тим, що датчик (15) вимірювання відстані прикріплений до поздовжнього кінця стійки, який разом із зазначеним датчиком (15) вимірювання відстані проходить всередину барабана паралельно осі (3) обертання.
6. Спосіб багаторазового заповнення центрифуги (1) періодичної дії за будь-яким з пп. 1-5, містить наступні етапи:
a) задають значення відстані А між датчиком (15) вимірювання відстані і вільною поверхнею (14) наповнювача, що завантажується в барабан (2) центрифуги, передбачаючи, що наповнювач рівномірно, з однаковою товщиною розподіляється по стінці (7) барабана (2) центрифуги за рахунок швидкого обертання при високій швидкості обертання барабана (2) центрифуги;
b) задають значення першої відстані А1 між датчиком (15) вимірювання відстані і тривимірною вільною поверхнею (10) наповнювача, що завантажується в барабан (2), передбачаючи, що наповнювач рівномірно розподіляється в барабані з утворенням тривимірної вільної поверхні (10) за рахунок повільного обертання при низькій швидкості обертання барабана центрифуги, а також що процес заповнення барабана центрифуги триває певний час;
c) керують роботою центрифуги (1) шляхом обертання барабана (2) при низькій швидкості обертання;
d) заповнюють барабан (2) наповнювачем (9) до першого моменту часу t1, при якому датчик (15) вимірювання відстані вимірює значення першої відстані А1;
e) керують роботою центрифуги (1) шляхом обертання барабана (2) при високій швидкості
обертання;
f) використовуючи датчик (15) вимірювання відстані, вимірюють значення четвертої відстані А4 в четвертий момент часу t4, при якому наповнювач (9) рівномірно, з однаковою товщиною, розподілений по стінці (7) барабана (2) за рахунок швидкого обертання при високій швидкості обертання барабана;
g) визначають нове значення першої відстані за формулою А1=А1+f[(А4/А1)*(А-А4)], де f є функцією, що залежить від величини (А4/А1)*(А-А4);
h) витягують наповнювач (9) з барабана (2) центрифуги;
і) встановлюють вказане значення першої відстані А1 як нове значення першої відстані і керують роботою центрифуги (1) відповідно до етапів e) - h).
7. Спосіб за п. 6, який відрізняється тим, що зазначена функція має вигляд f[(A4/A1)*(А-А4)]=К*[(А4/А1)*(А-А4)], де К є константою.
8. Спосіб за п. 6 або 7, який відрізняється тим, що четвертий момент часу t4 є моментом часу, при якому наповнювач (9) рівномірно, з однаковою товщиною розподіляється по стінці (7) барабана (2) центрифуги в перший раз за рахунок швидкого обертання при високій швидкості обертання.
9. Спосіб за п. 8, який відрізняється тим, що висока швидкість обертання в два рази перевищує низьку швидкість обертання.
10. Спосіб за п. 8 або 9, який відрізняється тим, що барабан (2) центрифуги містить завантажувальний отвір для заповнення барабана наповнювачем (9), причому ширину завантажувального отвору регулюють обернено пропорційно функції f[(А4-А1)/(t4-t1)].
11. Спосіб за будь-яким з пп. 8-10, який відрізняється тим, що низьку швидкість обертання регулюють пропорційно функції f[(А4-А1/(t4-t1)].
12. Спосіб за п. 11, який відрізняється тим, що низька швидкість обертання становить від 160 до 200 об./хв.
13. Спосіб за будь-яким з пп. 8-12, який відрізняється тим, що різниця між першим моментом часу (t1) і четвертим моментом часу (t4) становить 14 с.
14. Спосіб за будь-яким з пп. 8-13, який відрізняється тим, що обсяг наповнювача (9), що завантажується в барабан (2) центрифуги, визначено четвертою відстанню (А4) та функції f[(А4-А1)/(t4-t1)] за одне завантаження.
15. Спосіб за будь-яким з пп. 6-14, який відрізняється тим, що процес чищення барабана (2) центрифуги, здійснюваний на етапі f), контролюють, використовуючи датчик (15) вимірювання відстані.
Текст
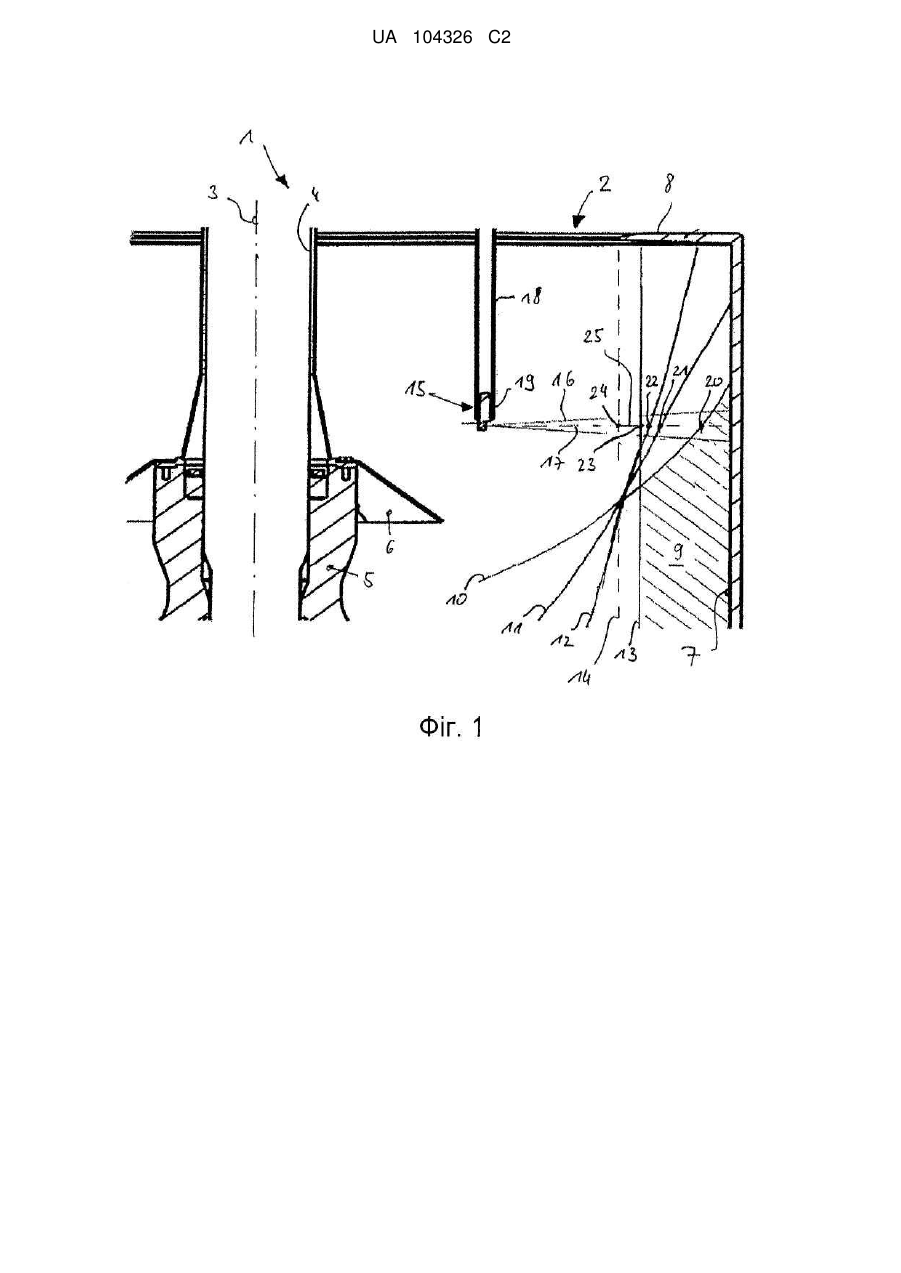
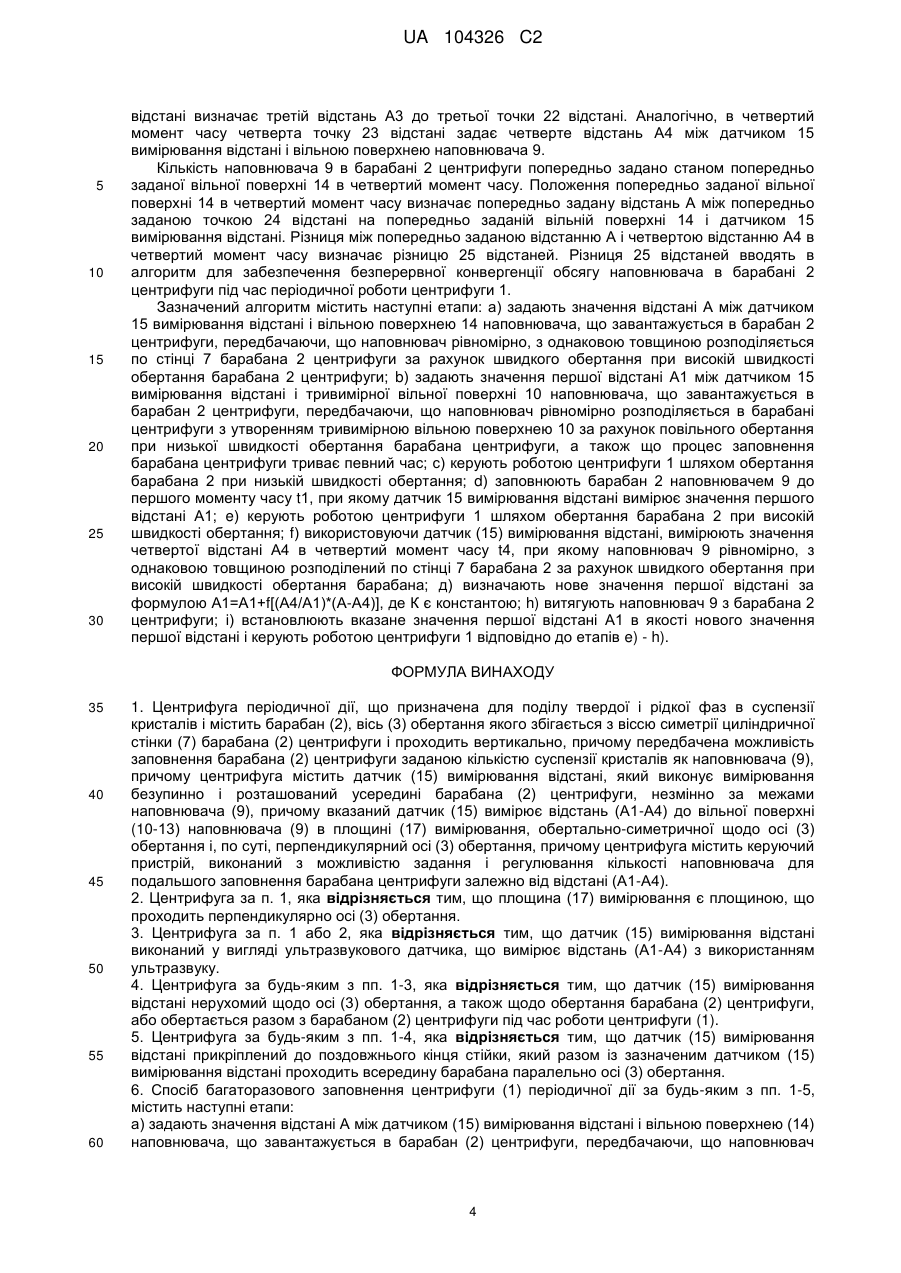
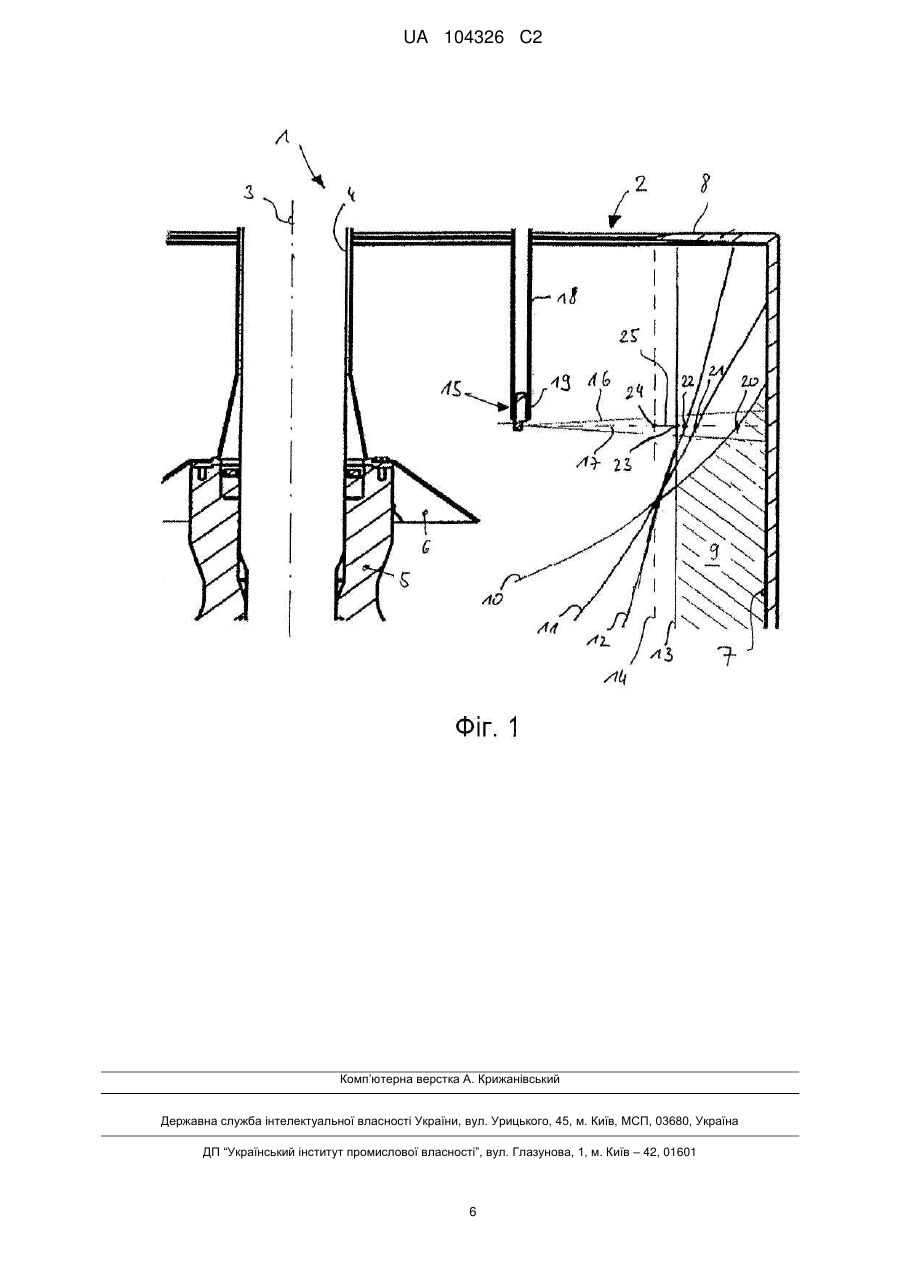
Реферат: Даний винахід стосується центрифуги періодичної дії, призначеної для поділу твердої і рідкої фаз в суспензії кристалів і містить барабан (2), вісь (3) обертання якого збігається з віссю симетрії циліндричної стінки (7) барабана (2) центрифуги і проходить вертикально, причому передбачена можливість заповнення барабана (2) центрифуги заданою кількістю суспензії кристалів як наповнювача (9). Центрифуга містить датчик (15) вимірювання відстані, який виконує вимірювання безупинно і розташований усередині барабана (2) центрифуги, незмінно за межами наповнювача (9). Датчик (15) вимірює відстань (А1-А4) до вільної поверхні (10-13) наповнювача (9) в площині (17) вимірювання, обертально-симетричної щодо осі (3) обертання і, по суті, перпендикулярній осі (3) обертання. Центрифуга містить керуючий пристрій, виконаний з можливістю задавання і регулювання кількості наповнювача для подальшого заповнення барабана центрифуги залежно від відстані (А1-А4). UA 104326 C2 (12) UA 104326 C2 UA 104326 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід стосується центрифуги періодичної дії, призначеної для поділу твердої і рідкої фаз в суспензії кристалів. Крім того, даний винахід стосується способу управління роботою зазначеної центрифуги за допомогою керуючого пристрою, що регулює кількість наповнювача. Центрифуга періодичної дії є відомим пристроєм, що використовується для поділу твердої і рідкої фаз в суспензії кристалів при виробництві харчових продуктів. Наприклад, проміжним продуктом в процесі обробки цукрової тростини і цукрового буряка є утфель, причому поділ зазначених проміжних продуктів на тверду і рідку фракції відбувається періодично на послідовних робочих етапах з використанням центрифуги періодичної дії. Центрифуга періодичної дії містить барабан, який на початку кожного робочого етапу заповнюють суспензією кристалів, що є наповнювачем, при цьому центрифуга обертається зі швидкістю 100250 об/хв. Після того, як барабан центрифуги заповнюють заданою кількістю наповнювача, центрифугу розганяють до високої швидкості обертання в діапазоні від 960 до 1500 об/хв. Вказану швидкість підтримують до тих пір, поки не буде досягнутий необхідний темп сушіння наповнювача. Після цього центрифугу знову уповільнюють, а наповнювач витягують з барабана за допомогою розвантажувального пристрою. Після очищення барабана центрифуги даний робочий етап завершується і починається новий робочий етап, на якому в барабан центрифуги завантажують нову порцію суспензії кристалів, виробляють її центрифугування і подальше вилучення. Відомо, що процес заповнення барабана центрифуги можна контролювати, використовуючи ємнісний контактний датчик, який розташовують усередині барабана у вигляді механічного важеля. Контактний датчик виконаний у вигляді електрода, який замикає електричний ланцюг при зіткненні з наповнювачем і, тим самим, забезпечує контакт. Зазначений контакт сприймається як сигнал для завершення заповнення барабана, тобто положення контактного датчика визначає завершення процесу заповнення, причому при кожному завантаженні барабан центрифуги заповнюється однаковою кількістю наповнювача. Однак для надійного і рівного ходу центрифуги бажано забезпечувати можливість реагування на різні зміни характеру потоку наповнювача від завантаження до завантаження шляхом регулювання кількості наповнювача для кожного завантаження. Завдання цього винаходу полягає в тому, щоб запропонувати центрифугу періодичної дії, а також спосіб оптимального багаторазового і відтвореного заповнення зазначеної центрифуги періодичної дії. При цьому запропоноване рішення забезпечує надійний і рівний хід центрифуги при використанні суспензій кристалів різної якості. Крім того, даний винахід дозволяє отримати незмінну якість видобутих кристалів під час роботи центрифуги. Пропонована центрифуга періодичної дії, призначена для поділу твердої і рідкої фаз в суспензії кристалів, містить барабан, вісь обертання якого збігаються з віссю симетрії циліндричної стінки барабана і проходить вертикально, причому передбачена можливість заповнення барабана центрифуги заданою кількістю суспензії кристалів в якості наповнювача. Крім того, пропонована центрифуга містить датчик вимірювання відстані, яки виконує вимірювання безупинно і розташований усередині барабана центрифуги, незмінно за межами наповнювача. При цьому зазначений датчик вимірює відстань до вільної поверхні наповнювача в площині вимірювання, обертальносиметричної щодо осі обертанняі, по суті перпендикулярної осі обертання. При цьому пропонована центрифуга також містить керуючий пристрій, виконаний з можливістю задавання і регулювання кількості наповнювач для подальшого заповнення барабана центрифуги залежно від вказаної відстані. Пропонований спосіб багаторазового заповнення пропонованої центрифуги періодичної дії містить наступні етапи: а) задають значення відстані А між датчиком вимірювання відстані і вільною поверхнею наповнювача, що завантажується в барабан центрифуги, передбачаючи, що наповнювач рівномірно, з однаковою товщиною розподіляється по стінці барабана за рахунок швидкого обертання при високій швидкості обертання барабана центрифуги; b) задають значення першого відстані А1 між датчиком вимірювання відстані і тривимірної вільною поверхнею наповнювача, що завантажується в барабан, передбачаючи, що наповнювач рівномірно розподіляється в барабані центрифуги з утворенням тривимірне вільної поверхні за рахунок повільного обертання при низькій швидкості обертання барабана, а також, що процес заповнення барабана центрифуги триває певний час; с) керують роботою центрифуги шляхом обертання барабана при низькій швидкості обертання; d) заповнюють барабан наповнювачем до першого моменту часу t1, при якому датчик вимірювання відстані вимірює значення першої відстані А1; e) керують роботою центрифуги шляхом обертання барабана при високій швидкості обертання; f) використовуючи датчик вимірювання відстані, вимірюють значення четвертої відстані А4 в четвертий момент часу t4, при якому наповнювач рівномірно, з однаковою 1 UA 104326 C2 5 10 15 20 25 30 35 40 45 50 55 60 товщиною розподілений по стінці барабана за рахунок швидкого обертання при високій швидкості обертання барабана; g) визначають нове значення першого відстані за формулою А1=А1+f[(А4/А1)*(А-А4)], де f є функцією, що залежить від величини [(А4/А1)*(А-А4)]; h) витягують наповнювач з барабана центрифуги; і) встановлюють вказане значення першої відстані А1 в якості нового значення першої відстані і керують роботою центрифуги відповідно до етапів e) - і). Площина виміру переважно представляє собою площину, що проходить перпендикулярно осі обертання. Крім того, датчик вимірювання відстані виконаний у вигляді ультразвукового датчика, що вимірює відстань з використанням ультразвуку. Датчик вимірювання відстані переважно нерухомий щодо осі обертання, а також щодо обертання барабана або, як альтернативний варіант, обертається разом з барабаном під час роботи центрифуги. Датчик вимірювання відстані переважно прикріплений до поздовжнього кінця стійки, який разом із зазначеним датчиком вимірювання відстані проходить всередину барабана паралельно осі обертання. Зазначена функція має вигляд f [(А4/А1)*(А-А4)]=К*[(А4/А1)*(А-А4)], де К є константою. Четвертий момент часу t4 переважно є моментом часу, при якому наповнювач рівномірно, з однаковою товщиною розподіляється по стінці барабана в перший раз за рахунок швидкого обертання при високій швидкості обертання. Переважно висока швидкість обертання, по суті, в два рази перевищує низьку швидкість обертання при заповненні (переважно в два рази більше низькій швидкості обертання при заповненні, більш переважно становить 600 об/хв). Барабан центрифуги переважно містить завантажувальний отвір для заповнення барабана наповнювачем, причому ширину завантажувального отвору регулюють обернено пропорційно функції f[(А4-А1)/(t4-t1)]. Низька швидкість обертання переважно складає від 160 до 200 об/хв. Різниця між першим моментом часу t1 і четвертим моментом часу t4 переважно становить 14 с Крім того, обсяг наповнювача, що завантажується в барабан центрифуги, переважно визначено четвертою відстанню А4 і функцією f [(A4-A1)/(t4-11)] за одне завантаження. Процес чищення барабана центрифуги, здійснюваний на етапі f), контролюють, використовуючи датчик вимірювання відстані. Таким чином, заповнення барабана контролюють безконтактним способом, використовуючи датчик вимірювання відстані. В результаті, запобігається контакт датчика вимірювання відстані і стійки, на якій закріплений вказаний датчик, з наповнювачем. Завдяки цьому центрифуга і спосіб, пропоновані в цьому винаході, відповідають гігієнічним стандартам, які висуваються до подібних технічних рішень, використовуваних при виробництві продуктів харчування. Під час роботи центрифуги датчик вимірювання відстані безперервно фіксує відстань до стінки барабана центрифуги, коли вказаний барабан порожній, а також відстань до поверхні наповнювача від початку заповнення до кінця робочого етапу, коли витягують кристали і виконують промивку барабана. При заповненні барабана центрифуги швидкість обертання переважно є низькою, причому низьку швидкість обертання вибирають залежно від характеру потоку наповнювача. Прискорення вільного падіння, а також відцентрової сили, створюваного обертанням барабана центрифуги, що діє на наповнювач в барабані. Під час роботи центрифуги при низькій швидкості обертання, зокрема під час наповнення барабана, формується вільна поверхня наповнювача у вигляді параболи обертання. Коли швидкість обертання барабана збільшують до високої швидкості, наповнювач розподіляється по стінці барабана з однаковою товщиною і обертально симетрично, причому вільна поверхня наповнювача утворює циліндр, розташований симетрично щодо осі обертання. Відхилення значення четвертої відстані А4 від заданого значення відстані А є показником відхилення обсягу наповнювача в барабані від заданого обсягу наповнювача, що характеризується відстанню А. Безперервна конвергенція значення четвертої відстані з заданим значенням відстані і, відповідно, обсягу наповнювача з заданим об'ємом наповнювача досягається запропонованим способом. Величина (A4/A1)/(t4-t1) відповідає швидкості заповнення під час заповнення барабана центрифуги наповнювачем. Швидкість заповнення є показником в'язкості наповнювача, причому наповнювач з високою в'язкістю надходить повільніше, ніж наповнювач з низькою в'язкістю. Ширину завантажувального отвору переважно регулюють залежно від в'язкості наповнювача. Якщо в'язкість наповнювача висока і відповідно, швидкість заповнення є низькою, то ширину отвору збільшують, тоді як при низькій в'язкості наповнювача і, відповідно, високій швидкості заповнення забезпечується отвір з невеликою шириною. Крім того, низьку швидкість обертання, при якій центрифуга обертається під час заповнення барабана, переважно вибирають залежно від характеру потоку наповнювача. Таким чином, кожен робочий етап характеризується відповідним значенням четвертої відстані А4, відповідним обсягом наповнювача, а також 2 UA 104326 C2 5 10 15 20 25 30 35 40 45 50 55 60 відповідною швидкістю наповнення, при цьому на підставі цих даних можна визначити відповідну кількість кристалів, одержуваних у процесі центрифугування. Ці дані можуть бути зареєстровані під час роботи центрифуги. Після заповнення барабана центрифуги наповнювачем барабан розганяють до високої швидкості обертання. При цьому кристали (тверда фаза), наявні в наповнювачі, відокремлюються від рідкої фази (наприклад, сиропу) під дією відцентрової сили. В результаті, збільшується четверта відстань А4, причому зазначене збільшення є показником характеру сушіння наповнювача. Після процесу центрифугування барабан уповільнюють до швидкості обертання, необхідної для проведення чистки, причому механічний розвантажувальний пристрій зшкрібає залишки кристалів зі стінок барабана. Крім того, зазначений процес переважно можна контролювати за допомогою датчика вимірювання відстані. Виміряна при цьому четверта відстань А4 є радіусом барабана після його повного очищення. Якщо четверта відстань А4, виміряна датчиком вимірювання відстані, значно менша діаметра барабана, то очевидно, що на стінці барабана і досі знаходяться залишки кристалів і, відповідно, необхідно провести додаткову чистку барабана центрифуги. Далі наведено докладний опис центрифуги відповідно до переважного варіанту втілення цього винаходу з посиланням на додане схематичне креслення. На фіг. 1 показаний поздовжній розріз центрифуги відповідно до варіанту виконання цього винаходу. Як показано на фіг. 1, центрифуга 1 періодичної дії містить барабан 2, встановлений з можливістю обертання щодо осі 3 обертання. Зазначений барабан 2 містить вал 4, призначений для приведення в обертання барабана 2. Зазначений вал 4 нерухомо прикріплений до втулки 5, яка служить опорою для барабана 2. Усередині барабана 2 центрифуги 1 передбачено розподільник 6, розташований на втулці 5 і виконаний у формі усіченого конуса. Барабан 2 утворений циліндричною стінкою 7, розташованою симетрично щодо осі 3 обертання, і кришкою 8, яка закриває циліндричну стінку 7. На фіг. 1 барабан 2 розташований таким чином, що його вісь 3 обертання проходить вертикально. Під час кожного завантаження барабан 2 центрифуги заповнюють наповнювачем 9, при цьому барабан 2 центрифуги обертається зі швидкістю заповнення, яка становить від 160 до 200 об/хв. В результаті, на верхній стороні наповнювача 9 формується вільна поверхня, яка після завершення заповнення барабана 2 є параболою обертання. Дана парабола на фіг. 1 позначена номером позиції 10. Після заповнення барабана 2 центрифуги наповнювачем 9 його розганяють, збільшуючи швидкість його обертання від швидкості заповнення до швидкості центрифугування, яка становить від 900 до 1500 об/хв. Процес розгону барабана центрифуги починається в перший момент часу, продовжується протягом другого і третього моменту часу і закінчується в четвертий момент часу. У другій момент часу вільна поверхня наповнювача 9 має форму параболи обертання, позначеної на фіг. 1 номером позиції 11 і має більшу крутизну в порівнянні з параболою, що формується в перший момент часу. У третій момент часу вільна поверхня наповнювача 9 формується параболою 12, причому крутість параболи 12 більше крутизни параболи, що формується в другий момент часу. В результаті, в четвертий момент часу під час розгону барабана 2 наповнювач 9 розподіляється по циліндричній стінці барабана 2 центрифуги таким чином, що вільна поверхня наповнювача 9 є циліндром 13, симетричний відносно осі обертання 3. Крім того, в барабані 2 центрифуги передбачений датчик 15 вимірювання відстані, виконаний у вигляді ультразвукового датчика і розташований усередині барабана центрифуги так, що при розгоні барабана центрифуги він незмінно знаходиться за межами наповнювача 9. Центрифуга 1 містить стійку 18 з поздовжнім кінцем 19, причому зазначена стійка 18 нерухомо закріплена на кришці корпусу (не показаний), який розташований навколо барабана 2 центрифуги. Зазначена стійка 18 своїм подовжнім кінцем 19 проходить паралельно осі 3 обертання всередину барабана 2, при цьому на зазначеному поздовжньому кінці 19 закріплений датчик 15 вимірювання відстані. Датчик 15 вимірювання відстані постійно випромінює ультразвукові хвилі, що генеруються у вигляді ультразвукового конусоподібного променя 16, розташованого симетрично відносно площини 17, що проходить перпендикулярно до осі 3 обертання. Ультразвук, що випромінюється датчиком 15 вимірювання відстані, досягає вільної поверхні наповнювача 9 в першій точці 20 відстаней, в результаті, можна виміряти відстань першого А1 між датчиком 15 вимірювання відстані і першою точкою 20 відстаней. Аналогічно йде справа і в другій момент часу, при цьому ультразвук досягає вільної поверхні наповнювача 9 у другій точці 21 відстані і датчик 15 вимірювання відстані визначає другу відстань А2. У третій момент часу ультразвук досягає вільної поверхні наповнювача 9 в третій точці 22 відстані і датчик 15 вимірювання 3 UA 104326 C2 5 10 15 20 25 30 відстані визначає третій відстань A3 до третьої точки 22 відстані. Аналогічно, в четвертий момент часу четверта точку 23 відстані задає четверте відстань А4 між датчиком 15 вимірювання відстані і вільною поверхнею наповнювача 9. Кількість наповнювача 9 в барабані 2 центрифуги попередньо задано станом попередньо заданої вільної поверхні 14 в четвертий момент часу. Положення попередньо заданої вільної поверхні 14 в четвертий момент часу визначає попередньо задану відстань А між попередньо заданою точкою 24 відстані на попередньо заданій вільній поверхні 14 і датчиком 15 вимірювання відстані. Різниця між попередньо заданою відстанню А і четвертою відстанню А4 в четвертий момент часу визначає різницю 25 відстаней. Різниця 25 відстаней вводять в алгоритм для забезпечення безперервної конвергенції обсягу наповнювача в барабані 2 центрифуги під час періодичної роботи центрифуги 1. Зазначений алгоритм містить наступні етапи: а) задають значення відстані А між датчиком 15 вимірювання відстані і вільною поверхнею 14 наповнювача, що завантажується в барабан 2 центрифуги, передбачаючи, що наповнювач рівномірно, з однаковою товщиною розподіляється по стінці 7 барабана 2 центрифуги за рахунок швидкого обертання при високій швидкості обертання барабана 2 центрифуги; b) задають значення першої відстані А1 між датчиком 15 вимірювання відстані і тривимірної вільної поверхні 10 наповнювача, що завантажується в барабан 2 центрифуги, передбачаючи, що наповнювач рівномірно розподіляється в барабані центрифуги з утворенням тривимірною вільною поверхнею 10 за рахунок повільного обертання при низької швидкості обертання барабана центрифуги, а також що процес заповнення барабана центрифуги триває певний час; с) керують роботою центрифуги 1 шляхом обертання барабана 2 при низькій швидкості обертання; d) заповнюють барабан 2 наповнювачем 9 до першого моменту часу t1, при якому датчик 15 вимірювання відстані вимірює значення першого відстані А1; e) керують роботою центрифуги 1 шляхом обертання барабана 2 при високій швидкості обертання; f) використовуючи датчик (15) вимірювання відстані, вимірюють значення четвертої відстані А4 в четвертий момент часу t4, при якому наповнювач 9 рівномірно, з однаковою товщиною розподілений по стінці 7 барабана 2 за рахунок швидкого обертання при високій швидкості обертання барабана; д) визначають нове значення першої відстані за формулою А1=А1+f[(А4/А1)*(А-А4)], де К є константою; h) витягують наповнювач 9 з барабана 2 центрифуги; і) встановлюють вказане значення першої відстані А1 в якості нового значення першої відстані і керують роботою центрифуги 1 відповідно до етапів e) - h). ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 60 1. Центрифуга періодичної дії, що призначена для поділу твердої і рідкої фаз в суспензії кристалів і містить барабан (2), вісь (3) обертання якого збігається з віссю симетрії циліндричної стінки (7) барабана (2) центрифуги і проходить вертикально, причому передбачена можливість заповнення барабана (2) центрифуги заданою кількістю суспензії кристалів як наповнювача (9), причому центрифуга містить датчик (15) вимірювання відстані, який виконує вимірювання безупинно і розташований усередині барабана (2) центрифуги, незмінно за межами наповнювача (9), причому вказаний датчик (15) вимірює відстань (А1-А4) до вільної поверхні (10-13) наповнювача (9) в площині (17) вимірювання, обертально-симетричної щодо осі (3) обертання і, по суті, перпендикулярний осі (3) обертання, причому центрифуга містить керуючий пристрій, виконаний з можливістю задання і регулювання кількості наповнювача для подальшого заповнення барабана центрифуги залежно від відстані (А1-А4). 2. Центрифуга за п. 1, яка відрізняється тим, що площина (17) вимірювання є площиною, що проходить перпендикулярно осі (3) обертання. 3. Центрифуга за п. 1 або 2, яка відрізняється тим, що датчик (15) вимірювання відстані виконаний у вигляді ультразвукового датчика, що вимірює відстань (А1-А4) з використанням ультразвуку. 4. Центрифуга за будь-яким з пп. 1-3, яка відрізняється тим, що датчик (15) вимірювання відстані нерухомий щодо осі (3) обертання, а також щодо обертання барабана (2) центрифуги, або обертається разом з барабаном (2) центрифуги під час роботи центрифуги (1). 5. Центрифуга за будь-яким з пп. 1-4, яка відрізняється тим, що датчик (15) вимірювання відстані прикріплений до поздовжнього кінця стійки, який разом із зазначеним датчиком (15) вимірювання відстані проходить всередину барабана паралельно осі (3) обертання. 6. Спосіб багаторазового заповнення центрифуги (1) періодичної дії за будь-яким з пп. 1-5, містить наступні етапи: a) задають значення відстані А між датчиком (15) вимірювання відстані і вільною поверхнею (14) наповнювача, що завантажується в барабан (2) центрифуги, передбачаючи, що наповнювач 4 UA 104326 C2 5 10 15 20 25 30 35 40 45 рівномірно, з однаковою товщиною розподіляється по стінці (7) барабана (2) центрифуги за рахунок швидкого обертання при високій швидкості обертання барабана (2) центрифуги; b) задають значення першої відстані А1 між датчиком (15) вимірювання відстані і тривимірною вільною поверхнею (10) наповнювача, що завантажується в барабан (2), передбачаючи, що наповнювач рівномірно розподіляється в барабані з утворенням тривимірної вільної поверхні (10) за рахунок повільного обертання при низькій швидкості обертання барабана центрифуги, а також що процес заповнення барабана центрифуги триває певний час; c) керують роботою центрифуги (1) шляхом обертання барабана (2) при низькій швидкості обертання; d) заповнюють барабан (2) наповнювачем (9) до першого моменту часу t1, при якому датчик (15) вимірювання відстані вимірює значення першої відстані А1; e) керують роботою центрифуги (1) шляхом обертання барабана (2) при високій швидкості обертання; f) використовуючи датчик (15) вимірювання відстані, вимірюють значення четвертої відстані А4 в четвертий момент часу t4, при якому наповнювач (9) рівномірно, з однаковою товщиною, розподілений по стінці (7) барабана (2) за рахунок швидкого обертання при високій швидкості обертання барабана; g) визначають нове значення першої відстані за формулою А1=А1+f[(А4/А1)*(А-А4)], де f є функцією, що залежить від величини (А4/А1)*(А-А4); h) витягують наповнювач (9) з барабана (2) центрифуги; і) встановлюють вказане значення першої відстані А1 як нове значення першої відстані і керують роботою центрифуги (1) відповідно до етапів e) - h). 7. Спосіб за п. 6, який відрізняється тим, що зазначена функція має вигляд f[(A4/A1)*(АА4)]=К*[(А4/А1)*(А-А4)], де К є константою. 8. Спосіб за п. 6 або 7, який відрізняється тим, що четвертий момент часу t4є моментом часу, при якому наповнювач (9) рівномірно, з однаковою товщиною розподіляється по стінці (7) барабана (2) центрифуги в перший раз за рахунок швидкого обертання при високій швидкості обертання. 9. Спосіб за п. 8, який відрізняється тим, що висока швидкість обертання в два рази перевищує низьку швидкість обертання. 10. Спосіб за п. 8 або 9, який відрізняється тим, що барабан (2) центрифуги містить завантажувальний отвір для заповнення барабана наповнювачем (9), причому ширину завантажувального отвору регулюють обернено пропорційно функції f[(А4-А1)/(t4-t1)]. 11. Спосіб за будь-яким з пп. 8-10, який відрізняється тим, що низьку швидкість обертання регулюють пропорційно функції f[(А4-А1/(t4-t1)]. 12. Спосіб за п. 11, який відрізняється тим, що низька швидкість обертання становить від 160 до 200 об./хв. 13. Спосіб за будь-яким з пп. 8-12, який відрізняється тим, що різниця між першим моментом часу (t1) і четвертим моментом часу (t4) становить 14 с. 14. Спосіб за будь-яким з пп. 8-13, який відрізняється тим, що обсяг наповнювача (9), що завантажується в барабан (2) центрифуги, визначено четвертою відстанню (А4) та функції f[(А4А1)/(t4-t1)] за одне завантаження. 15. Спосіб за будь-яким з пп. 6-14, який відрізняється тим, що процес чищення барабана (2) центрифуги, здійснюваний на етапі f), контролюють, використовуючи датчик (15) вимірювання відстані. 5 UA 104326 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюDiscontinuous centrifuge comprising a filling product controller and method for operating the centrifuge
Автори англійськоюJanssen, Viktor, Neuen, Dominik, Thelen, Michael, Sonnenburg, Reinhard
Автори російськоюЯнссен Виктор, Ноен Доминик, Телен Михель, Сонненбург Райнхард
МПК / Мітки
МПК: B04B 11/00
Мітки: управління, періодичної, регулювання, дії, кількості, роботою, зазначеної, наповнювача, центрифуги, центрифуга, спосіб
Код посилання
<a href="https://ua.patents.su/8-104326-centrifuga-periodichno-di-z-regulyuvannya-kilkosti-napovnyuvacha-i-sposib-upravlinnya-robotoyu-zaznacheno-centrifugi.html" target="_blank" rel="follow" title="База патентів України">Центрифуга періодичної дії з регулювання кількості наповнювача і спосіб управління роботою зазначеної центрифуги</a>
Пристрій програмного управління роботою газліфтної свердловини періодичної дії
Номер патенту: 34930
Опубліковано: 16.02.2004
Автори: Подоляко Сергій Анатолійович, Примоленний Юрій Васильович, Яцура Ярослав Васильович, Лігоцький Микола Володимирович, Бойчук Іван Якович, Меркур'єв Анатолій Борисович, Боднар Володимир Михайлович, Тарабаринов Петро Васильович
МПК: E21B 43/00, F04F 1/20
Мітки: управління, дії, роботою, пристрій, свердловини, періодичної, програмного, газліфтної
Формула / Реферат:
Пристрій програмного управління роботою газліфтної свердловини періодичної дії, що включає керуючий клапан, штуцер з каліброваним отвором, коромисло з роликом та годинниковий механізм з програмним диском, який відрізняється ним, що програмний диск складений з окремих підпружинених дисків з пазами, що утворюють загальні пази змінної довжини, коромисло з одного кінця зв'язане з програмним диском, а з другого - з додатковою пружиною,...
Центрифуга періодичної дії
Номер патенту: 72463
Опубліковано: 27.08.2012
Автори: Пушанко Наталія Миколаївна, Гуменюк Андрій Юрійович
МПК: B04B 3/00
Мітки: періодичної, центрифуга, дії
Формула / Реферат:
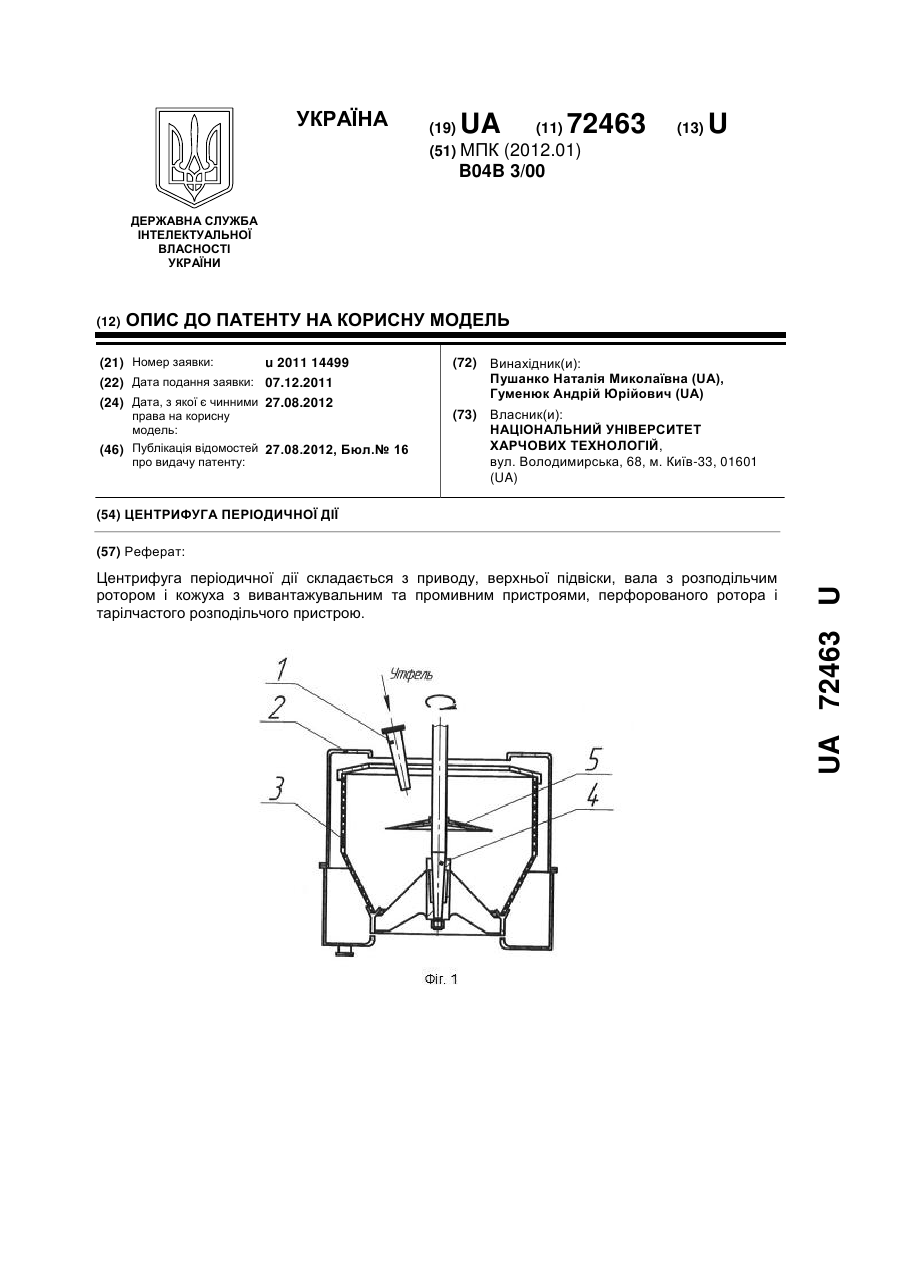
Центрифуга періодичної дії, що складається з приводу, верхньої підвіски, вала з розподільчим ротором і кожуха з установленими на ньому вивантажувальним та промивним пристроями, всередині якого на вертикальному валу закріплено перфорований ротор і тарілчастий розподільчий пристрій, яка відрізняється тим, що тарілчастий розподільчий пристрій виконано у вигляді зрізаного конуса, на робочій поверхні якого розміщено ряд ребер криволінійної...
Спосіб відведення рідкої фази з барабана осадової центрифуги

Номер патенту: 18760
Опубліковано: 15.11.2006
Автор: Гуць Віктор Степанович
МПК: B01D 21/26
Мітки: спосіб, фазі, барабана, відведення, рідкої, осадової, центрифуги
Формула / Реферат:
Спосіб відведення рідкої фази з барабана осадової центрифуги, що включає завантаження жирової суспензії в центрифугу, розділення її на фракції і освітлення рідкої фази, відведення рідкої фази з барабана через перфорований верхній борт, який відрізняється тим, що рідка фаза відводиться завдяки коливанням мембрани, яка прикриває отвори і здійснює коливання під дією електромагнітного поля або іншого чинника у визначений технологічним регламентом...
Спосіб відведення багатофракційної рідкої фази з барабана центрифуги
Номер патенту: 18758
Опубліковано: 15.11.2006
Автор: Гуць Віктор Степанович
МПК: B01D 17/02, B01D 21/26
Мітки: барабана, центрифуги, фазі, спосіб, багатофракційної, відведення, рідкої
Формула / Реферат:
Спосіб відведення багатофракційної рідкої фази з барабана центрифуги, що включає завантаження жирової суспензії в центрифугу, розділення її на фракції і освітлення рідкої фази, відведення рідкої фази з барабана, який відрізняється тим, що в осадовій центрифузі рідка фаза відводиться через перфорований верхній борт завдяки коливанням мембрани, закріпленої над верхнім бортом і поділеної на кільцеві (коаксіальні) секції, які можуть вибірково...
Спосіб автоматичного управління процесом пастеризації фруктового наповнювача
Номер патенту: 61149
Опубліковано: 11.07.2011
Автори: Хуторний Віктор Іванович, Плєвє Олександр Георгійович
МПК: A23L 3/16, A23L 1/06, G05D 23/00
Мітки: процесом, наповнювача, фруктового, пастеризації, автоматичного, спосіб, управління
Формула / Реферат:
Спосіб автоматичного управління процесом пастеризації фруктового наповнювача, який включає вимірювання температур продукту у секціях пастеризатора та регулювання цих температур зміною подачі гріючої пари в оболонки відповідних секцій нагріву, який відрізняється тим, що для компенсації впливу другої секції на температуру продукту у першій та третій секціях, корегують завданням регулятора температури у першій та третій секціях при зміні...
Попередній патент: Поглинаючий стрижневий елемент ядерного реактора
Наступний патент: Спосіб виробництва пшенично-житніх булочок “луганські”
Випадковий патент: Спосіб оцінки стану зношення деталей інжекторів дизельних двигунів