Спосіб зменшення аварійності руху надводного чи підводного судна в різних аварійних ситуаціях
Формула / Реферат
1. Спосіб зменшення аварійності руху надводного чи підводного судна за наявності підводних і надводних потенційно небезпечних об'єктів (ПНО), що включає постійний прийом даних супутникових навігаційних систем, даних від РЛС, автоматичної ідентифікаційної системи, визначення місцеположення судна, вирахування швидкості судна, глибини під кілем та уникнення пошкодження судна при зіткненні, який відрізняється тим, що додатково виконуються наступні операції:
одержують тримірне зображення підводної обстановки з усіх сторін судна: спереду, з боків і позаду, для чого використовують гідролокатори в передній, задній, лівій та правій областях;
у разі виявлення ПНО, їх розпізнають розпізнавальним пристроєм і обирають оптимальний спосіб запобігання зіткненню судна з ПНО та розраховують траєкторію ухилення від ПНО.
2. Спосіб за п. 1, який відрізняється тим, що у випадку, при виявленні та розпізнанні ПНО в безпосередній близькості від судна, при неможливості уникнення зіткнення простим маневруванням, визначають та використовують пасивний захист у вигляді зовнішніх повітряних подушок на корпусі судна, які надувають в місці можливого зіткнення судна з ПНО, при цьому для уникнення нахилу судна на один бік, з іншої сторони судна симетрично спрацьовують такі ж самі подушки.
2. Спосіб за п. 1, який відрізняється тим, що у випадку, при виявленні та розпізнанні ПНО в безпосередній близькості від судна, при неможливості уникнення зіткнення простим маневруванням, використовують активний захист у вигляді струменів води під великим тиском від водометів під водою.
3. Спосіб за п. 1, який відрізняється тим, що для підводного судна огляд водного простору здійснюють і в верхній півсфері.
Текст
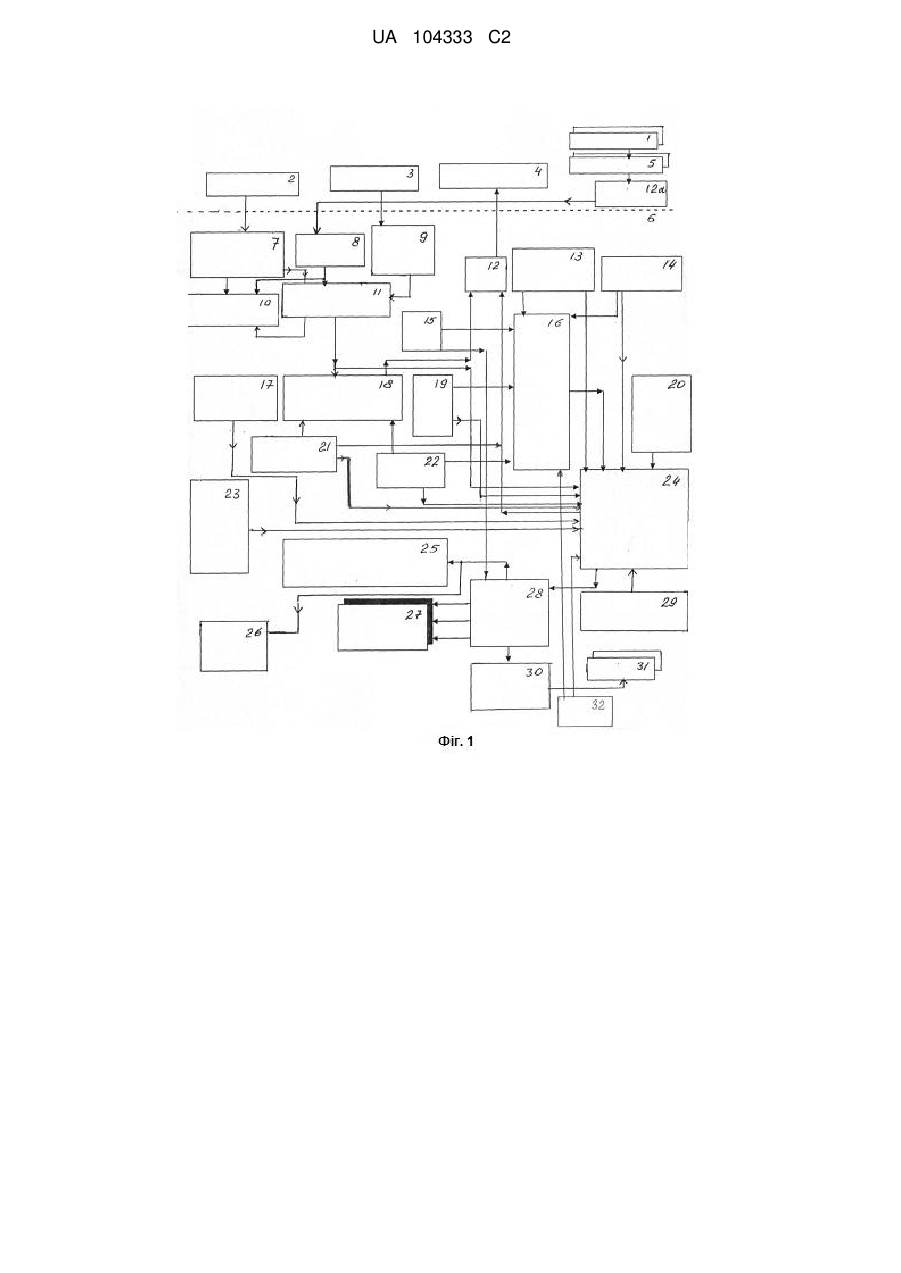
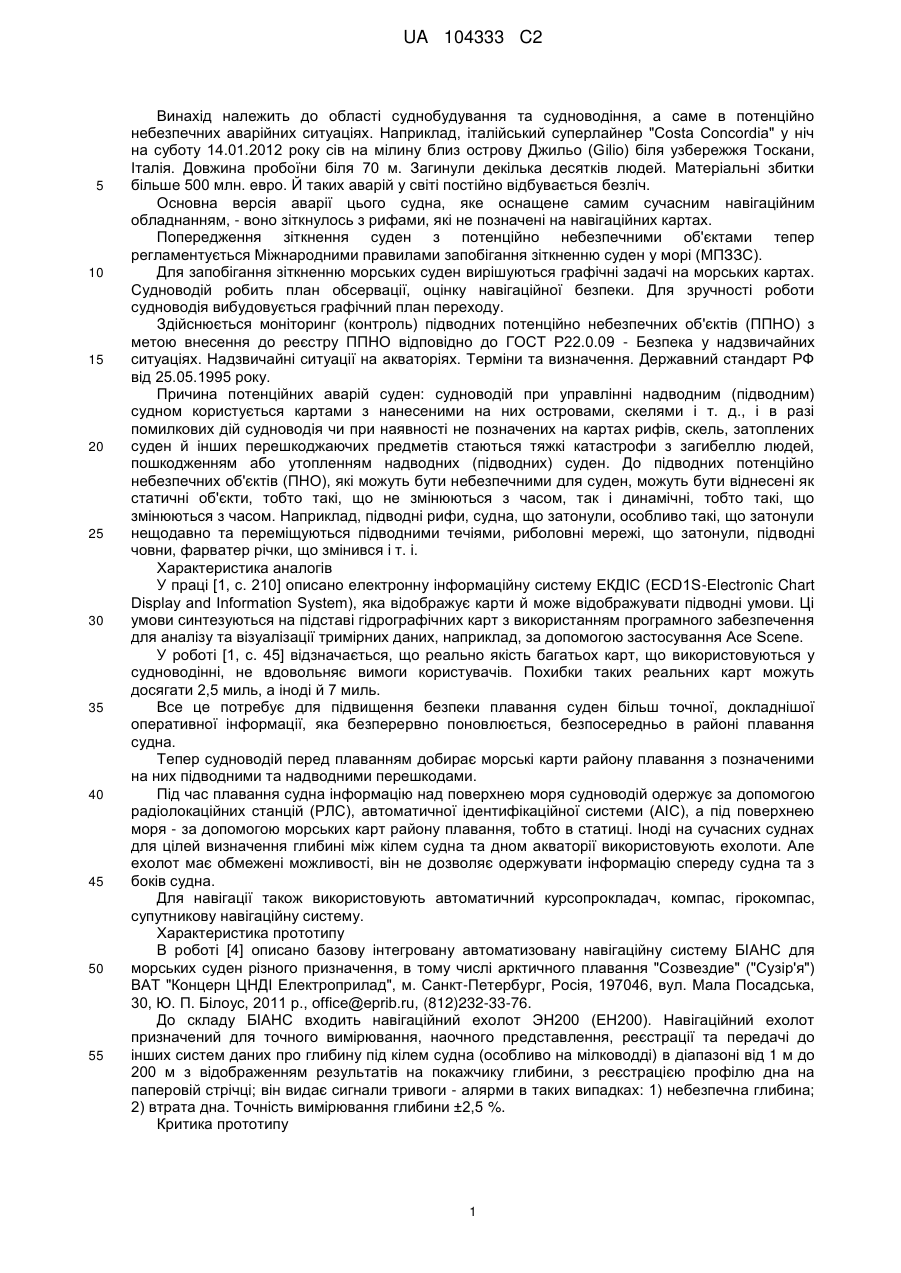
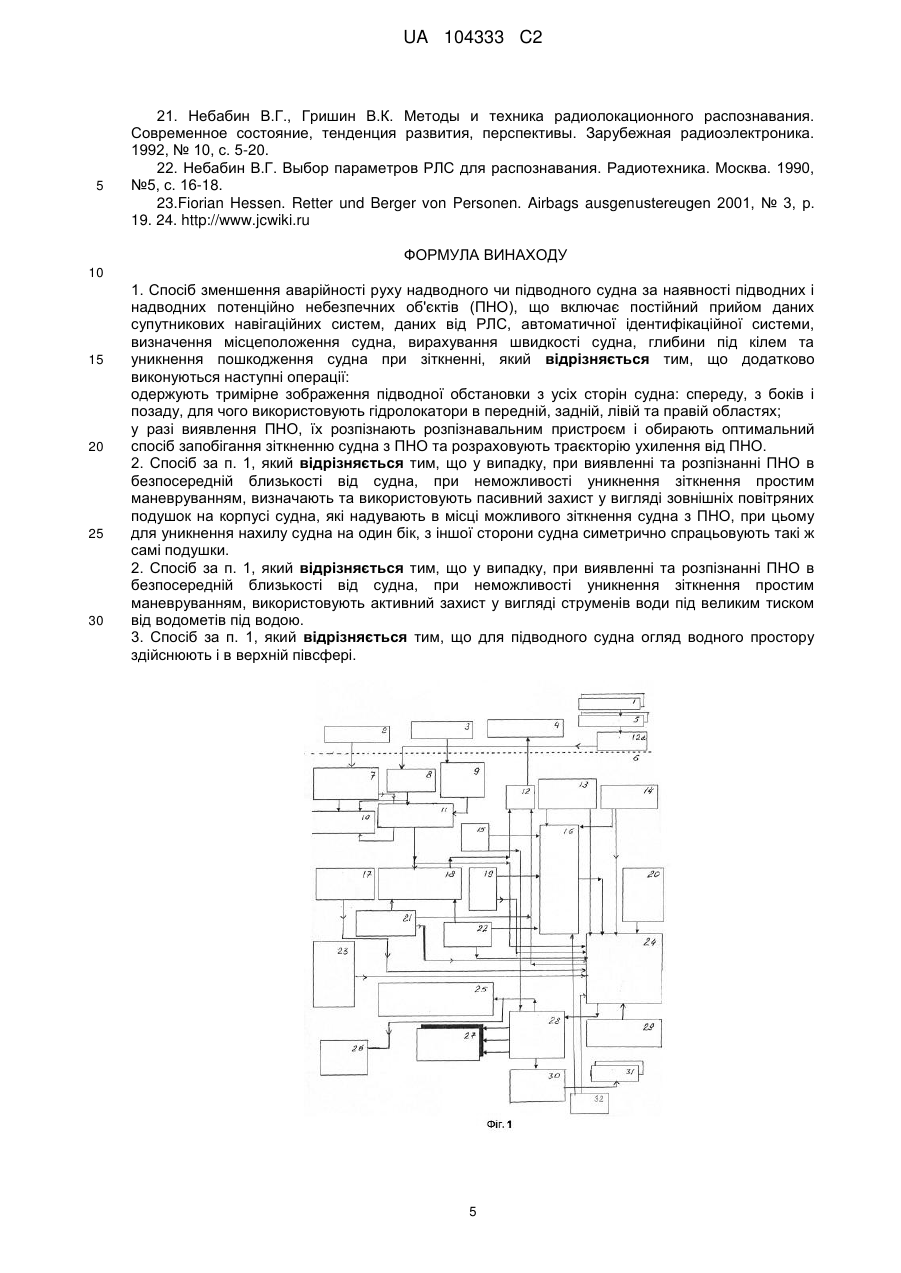
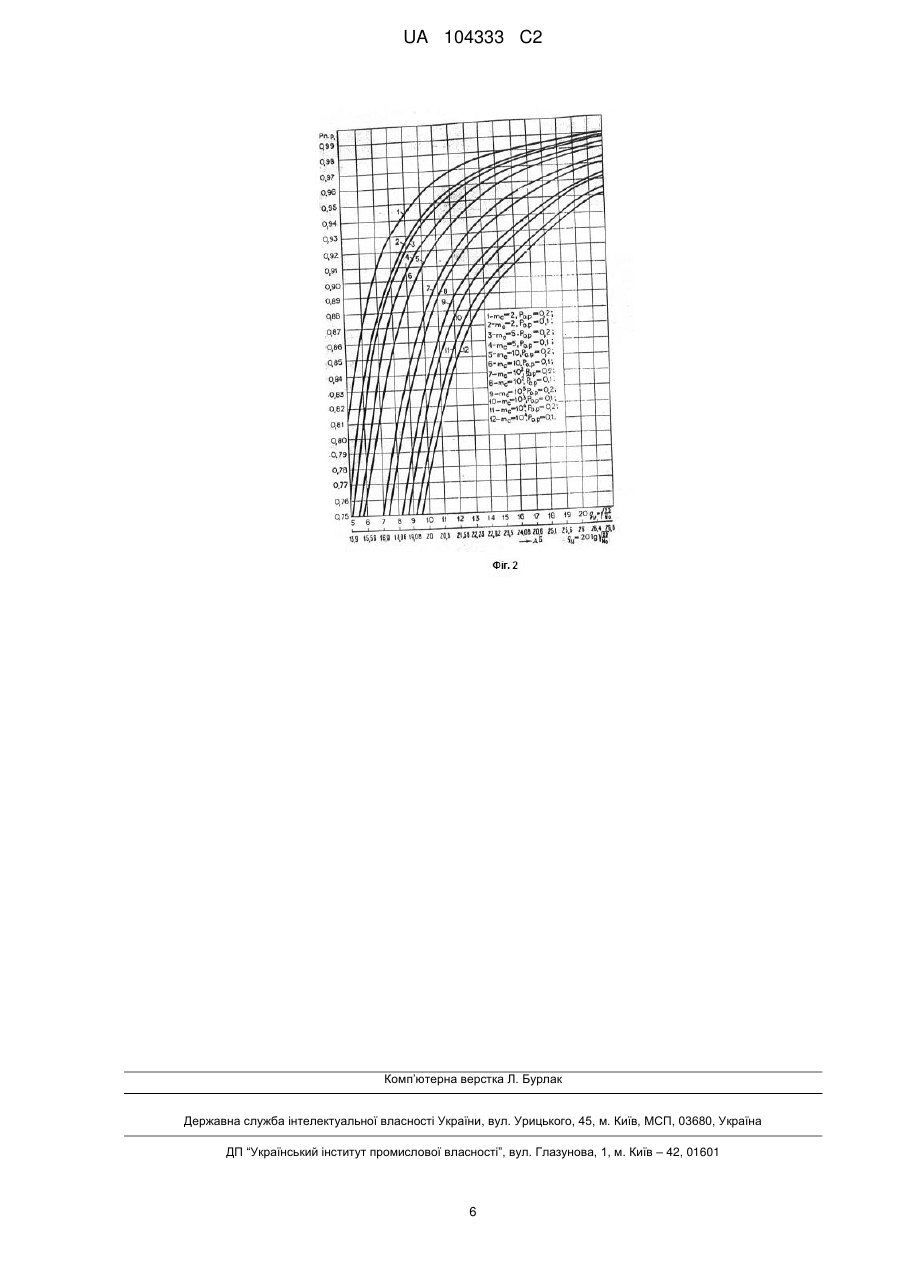
Реферат: Спосіб зменшення аварійності руху надводного чи підводного судна належить до області суднобудування та судноводіння, а саме в потенційно небезпечних аварійних ситуаціях. Спосіб полягає в отриманні тримірного зображення потенційно небезпечних предметів (ПНО) за рахунок встановлення гідролокаторів кругового огляду. в задній та передній півсферах, а також по лівому та правому бортах. Це дозволить одержувати точну, докладну та оперативну тримірну інформацію спереду, позаду, ліворуч і праворуч від судна, що рухається. У разі виявлення та розпізнавання ПНО близько від судна, для уникнення зіткнення з ПНО використовують додаткові операції, а саме водометні струмені, а також у місці можливого зіткнення борту судна з ПНО спрацьовують повітряні подушки. За допомогою заявленого способу, досягають підвищення ймовірності безаварійного руху надводного та підводного судна в різних потенційно небезпечних аварійних ситуаціях, в тому числі коли зіткнення судна з ПНО неможливо у звичайних умовах уникнути за допомогою маневру. UA 104333 C2 (12) UA 104333 C2 UA 104333 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до області суднобудування та судноводіння, а саме в потенційно небезпечних аварійних ситуаціях. Наприклад, італійський суперлайнер "Costa Concordia" у ніч на суботу 14.01.2012 року сів на мілину близ острову Джильо (Gilio) біля узбережжя Тоскани, Італія. Довжина пробоїни біля 70 м. Загинули декілька десятків людей. Матеріальні збитки більше 500 млн. евро. Й таких аварій у світі постійно відбувається безліч. Основна версія аварії цього судна, яке оснащене самим сучасним навігаційним обладнанням, - воно зіткнулось з рифами, які не позначені на навігаційних картах. Попередження зіткнення суден з потенційно небезпечними об'єктами тепер регламентується Міжнародними правилами запобігання зіткненню суден у морі (МПЗЗС). Для запобігання зіткненню морських суден вирішуються графічні задачі на морських картах. Судноводій робить план обсервації, оцінку навігаційної безпеки. Для зручності роботи судноводія вибудовується графічний план переходу. Здійснюється моніторинг (контроль) підводних потенційно небезпечних об'єктів (ППНО) з метою внесення до реєстру ППНО відповідно до ГОСТ Р22.0.09 - Безпека у надзвичайних ситуаціях. Надзвичайні ситуації на акваторіях. Терміни та визначення. Державний стандарт РФ від 25.05.1995 року. Причина потенційних аварій суден: судноводій при управлінні надводним (підводним) судном користується картами з нанесеними на них островами, скелями і т. д., і в разі помилкових дій судноводія чи при наявності не позначених на картах рифів, скель, затоплених суден й інших перешкоджаючих предметів стаються тяжкі катастрофи з загибеллю людей, пошкодженням або утопленням надводних (підводних) суден. До підводних потенційно небезпечних об'єктів (ПНО), які можуть бути небезпечними для суден, можуть бути віднесені як статичні об'єкти, тобто такі, що не змінюються з часом, так і динамічні, тобто такі, що змінюються з часом. Наприклад, підводні рифи, судна, що затонули, особливо такі, що затонули нещодавно та переміщуються підводними течіями, риболовні мережі, що затонули, підводні човни, фарватер річки, що змінився і т. і. Характеристика аналогів У праці [1, с. 210] описано електронну інформаційну систему ЕКДІС (ECD1S-Electronic Chart Display and Information System), яка відображує карти й може відображувати підводні умови. Ці умови синтезуються на підставі гідрографічних карт з використанням програмного забезпечення для аналізу та візуалізації тримірних даних, наприклад, за допомогою застосування Асе Scene. У роботі [1, с. 45] відзначається, що реально якість багатьох карт, що використовуються у судноводінні, не вдовольняє вимоги користувачів. Похибки таких реальних карт можуть досягати 2,5 миль, а іноді й 7 миль. Все це потребує для підвищення безпеки плавання суден більш точної, докладнішої оперативної інформації, яка безперервно поновлюється, безпосередньо в районі плавання судна. Тепер судноводій перед плаванням добирає морські карти району плавання з позначеними на них підводними та надводними перешкодами. Під час плавання судна інформацію над поверхнею моря судноводій одержує за допомогою радіолокаційних станцій (РЛС), автоматичної ідентифікаційної системи (АІС), а під поверхнею моря - за допомогою морських карт району плавання, тобто в статиці. Іноді на сучасних суднах для цілей визначення глибині між кілем судна та дном акваторії використовують ехолоти. Але ехолот має обмежені можливості, він не дозволяє одержувати інформацію спереду судна та з боків судна. Для навігації також використовують автоматичний курсопрокладач, компас, гірокомпас, супутникову навігаційну систему. Характеристика прототипу В роботі [4] описано базову інтегровану автоматизовану навігаційну систему БІАНС для морських суден різного призначення, в тому числі арктичного плавання "Созвездие" ("Сузір'я") ВАТ "Концерн ЦНДІ Електроприлад", м. Санкт-Петербург, Росія, 197046, вул. Мала Посадська, 30, Ю. П. Білоус, 2011 p., office@eprib.ru, (812)232-33-76. До складу БІАНС входить навігаційний ехолот ЭН200 (ЕН200). Навігаційний ехолот призначений для точного вимірювання, наочного представлення, реєстрації та передачі до інших систем даних про глибину під кілем судна (особливо на мілководді) в діапазоні від 1 м до 200 м з відображенням результатів на покажчику глибини, з реєстрацією профілю дна на паперовій стрічці; він видає сигнали тривоги - алярми в таких випадках: 1) небезпечна глибина; 2) втрата дна. Точність вимірювання глибини ±2,5 %. Критика прототипу 1 UA 104333 C2 5 10 15 20 25 30 35 40 45 50 55 60 Судноводій покладається при керуванні судном на раніше одержану до нього інформацію про підводні та надводні потенційно небезпечні об'єкти (ПНО). Він не має джерела достатньо повної об'єктивної достовірної поточної інформації про ПНО під час керування судном у русі та в динаміці. І судноводія закликають до використання: організаційних заходів, інтуїції й так званої доброї морської виучки. Задача винаходу Суттєві відмінності, що заявляються, дозволяють підвищити ймовірність безаварійного руху надводного та підводного судна в різних потенційно небезпечних аварійних ситуаціях у присутності підводних і надводних потенційно небезпечних об'єктів, в тому числі коли зіткнення судна з ПНО неможливо у звичайних умовах уникнути за допомогою маневру. Характеристика винаходу На фіг. 1 зображено структурну схему системи, що реалізує заявлюваний спосіб. Для вирішення цієї задачі на судні встановлюється, крім ехолоту, що визначає тільки відстань від кіля до дна моря, гідролокатори кругового огляду. А якщо судно має великі розміри, то встановлюються гідролокатори в задній та передній півсферах, а також по лівому та правому бортах. Це дозволить одержувати точну, докладну та оперативну тримірну інформацію спереду, позаду, ліворуч і праворуч від судна, що рухається. У разі виявлення та розпізнавання підводних об'єктів, що погрожують безпеці плавання судна, видається попереджувальний звуковий сигнал, а у разі необхідності - відповідний керуючий вплив на кермовий механізм судна, щоб уникнути зіткнення з ПНО. Якщо уникнути зіткнення з ПНО не вдається шляхом маневру судна, то використовують додаткові операції, а саме: водометні струмені, щоб уникнути заплутування гребного гвинта у риболовних мережах, а також у місці можливого зіткнення борту судна з ПНО спрацьовують повітряні подушки (airbag), подібні автомобільним. Пристрої комплексування даних і розпізнавання об'єктів докладно описані у працях: 1. Небабин В. Г., Сергеев В. В. Методы и техника радиолокационного распознавания. - М. Радио и связь. 1984 г.; 2. Nebabin V. G. Methods and Techniques of Radar Recognition. Boston-London. Artech House. 1995; 3. Multisensor Data Fusion and Applications. Paramond K. Varshney Syracuse University, New York. 13244. USA 4. Патент США № 7.102.496. МПК В 60 Q 1/00. Опубл. 05.09.2006. Multi-sensor integration for a vehicle. Інші пристрої в системі, зображені на фіг. 1, широко відомі та описані у відповідній літературі. [1-16] Оцінка ефективності системи Оцінити цю ефективність можна за допомогою інформаційного підходу, який описаний в роботі [2]. Розглянемо цей підхід більш докладніше. Перевагою інформаційного підходу є, по-перше, зручність і відносна простота його застосування на практиці, особливо при використанні в датчиках інформації: РЛС, ГЛС і т. д. цифрових методів обробки та передачі інформації (що дозволяє спростити завдання вимог до швидкодії та обсягу пам'яті ЕОМ, а також пропускної спроможності системи передачі даних); подруге, можливість порівняння різних систем розпізнавання. Наприклад, у порівнянні з імовірнісними показниками якості інформаційний критерій, що пропонується, з одного боку, дозволяє порівнювати системи з показниками якості, одержаними в різних умовах (з різним числом класів об'єктів, що розпізнаються, при різних значеннях вірогідності помилкового розпізнавання і т. і.), а з іншого боку, він дозволяє перейти від імовірнісних показників якості Рп.р., Рx.p. до інформаційного показника I*. Інформаційний критерій має ще одну перевагу, оскільки при відомих параметрах датчиків інформації: РЛС, ГЛС і т. д. та об'єкта, що розпізнається, він дозволяє оцінити показник інформативності джерел інформації в кожному окремому випадку. Розглянемо показники ефективності більш докладно. Ефективність систем автоматичного розпізнавання об'єктів може характеризуватись як імовірнісними параметрами - імовірністю виявлення об'єкта, імовірністю правильного розпізнавання та імовірністю хибних тривог, так і інформаційною кількістю інформації, що видається системою. Імовірності правильного виявлення Рп.в. та правильного розпізнавання Рп.р. визначаються формулами: Pп.в. Nп.о. Nзаг , Pп.р. Nп.p. Nзаг , де Nп.в. і Nп.р. - число правильно виявлених і число правильно розпізнаних об'єктів, Nзаг. загальне число об'єктів в заданому обсязі. 2 UA 104333 C2 5 Імовірність хибних тривог, Рх.т., за огляд (кадр) визначається формулою: Pх.т. Nп.ч.х.т. Nз.ч.з, де Nп.ч.х.т. - повне число хибних тривог і Nз.ч.з - загальне число зображень в огляді (кадрі). Інформаційний підхід дозволяє порівняти системи автоматичного розпізнавання об'єктів, що розпізнають різну кількість об'єктів з різними показниками якості. Відповідно до одержаних даних (див. Небабин В. Г. Выбор параметров РЛС для распознавания. Радиотехника. Москва. 1990, № 5, с. 16-18) кількість інформації І*, необхідна для розпізнавання, визначається виразом: 2 (n mc n Px.p. ) 2 I* F T log 2 [1 qu ] F T log 2 [1 ] 1 Px.p. , де ΔF - смуга частот РЛС; Т - час одержання та оброки інформації; 10 qu 2Э сер. Nо Эсер. відношення сигнал/шум по напрузі; - середня енергія сигналу, що розпізнається; Nо спектральна щільність потужності шуму; Р х.р., Рп.р. - імовірності хибного та правильного розпізнавання; mс - число об'єктів, що розпізнаються. Так, наприклад, якщо розпізнавання здійснюється по далекісному портрету, то mc nкл np np , 15 20 25 30 35 40 45 50 n n де nкл - число класів (типів) цілей, що розпізнаються, а p і p - число ракурсів об'єктів відповідно по азимуту β та куту місця ε. Мінімальна кількість інформації І*, необхідна для розпізнавання десяти класів сигналів (тобто mс = 10) з Рп.р. = 0,9 і Рх.р. = 0,1 при простому сигналі. З рис. 2 по кривій 6 одержуємо значення qu=9,7 або 19,5 дБ. Далі, вважаючи, що ΔF – 1/τi, Т = (2-3)/fмод, де τi - тривалість зондуючих імпульсів, f мод -6 мінімальна частота модуляцій відбитого сигналу, при якому здійснюється розпізнавання, τ i=10 6 . . 2 6. . с, fмод = 2 Гц, одержуємо ΔF=10 Гц, Т = (1-1,5) с. Тоді І* = ΔF Т log2[1+qu ] - 10 1 log2 2 . 6 [1+(9,7) ]6,6 10 біт. Для більш високої якості розпізнавання необхідна більша кількість інформації, тобто більші значення параметрів ΔF, T і qu. Спосіб, що заявляється, та система, що його реалізує для забезпечення гарантованого безаварійного руху судна в різних аварійних ситуаціях, працюють таким чином. На судні, яке обладнане вказаними вище приладами безпеки, судноводій вносить до системи кінцевий пункт призначення, вмикає двигун і судно починає рухатись в необхідному напрямку. На дисплеї постійно відображуються шлях судна, всі перешкоди та аварійні ділянки шляху, наявність на шляху потенційно небезпечних об'єктів. Якщо перешкоди з'являються миттєво й уникнути зіткнення шляхом маневру не вдається, то видається сигнал активізації зовнішніх подушок безпеки чи водометів. Відомо, що час наповнення газом подушки безпеки (ПБ) становить біля 20-25 мілісекунд, -3 тобто (20-25) х 10 сек [23]. ПБ заповнюється газом при подачі електричного імпульсу від відповідного датчика пристрою формування управляючих сигналів 28, фіг. 1. Накачування подушки газом відбувається автоматично, коли замикається електричний контакт, запалюється піросистема. Газ утворюється и подається в подушку безпеки за рахунок хімічної реакції NaN3 з KNO3, в результаті чого утворюється газоподібний азот N 2. Через деякий час (біля 10 секунд) газ починає виходити через маленькі отвори в подушці безпеки, і вона здувається. Сучасні подушки безпеки спрацьовують швидше, на їх розкриття уходить не більше 20 млсек. [24] Можливі варіації з часом здування ПБ. Структурна схема системи забезпечення гарантованого безаварійного руху надводного чи підводного судна в різних аварійних ситуаціях, а особливо, у присутності підводних і надводних потенційно небезпечних об'єктів, наведена на фіг. 1, де: 1 - метео РЛС; 2 - супутникова навігаційна система (СНС) типу GPS, ГЛОНАСС; 3 - автоматична ідентифікаційна система (АІС); 4 - система контролю за рухом суден; 5 - гідрометеоцентри; 6 - судно; 7 - приймач супутникової навігаційної системи; 8 - приймач гідрометеоінформації; 9 - бортовий блок АІС; 3 UA 104333 C2 5 10 15 20 10 - дисплей; 11 - система обробки інформації; 12, 12а - система передачі даних; 13 - ехолот визначення глибині під кілем судна; 14 - гідролокаційні станції; 15 - радіолокаційні станції; 16 - пристрій комплексування даних і розпізнавання об'єктів; 17 - гірокомпас; 18 - система об'єктивного контролю (реєстратор) даних; 19 - інфрачервоні датчики; 20 - блок пам'яті руху суден; 21 - надводні відеокамери; 22 - підводні відеокамери; 23 - пристрій визначення швидкості судна (лаг); 24 - пристрій аналізу обстановки та прийняття рішення про заходи пасивного та активного захисту судна; 25 - пристрій управління курсом судна; 26 - пристрій управління режимами роботи двигунів судна; 27 - зовнішні подушки безпеки судна; 28 - пристрій формування управляючих сигналів; 29 - магнітний компас; 30 - пристрій управління водометами. 31 - водомети; 32 - датчики радіоактивного випромінювання 25 30 35 40 45 50 55 60 Джерела інформації: 1. Вагущенко Л. Л., Стафеев А. М. Судовые автоматизированные системы навигации. -М.: Транспорт, 1989 г.-158 с. 2. Демиденко П. П. Судовые радиолокационные и радионавигационные системы. -Одесса: Феникс, 2009 г.-368 с. 3. Вагущенко Л. Л. Судовые навигационно-информационные системы. - Одесса: Феникс, 2004 г.-303 с. 4. Вильский Г. Б., Мальцев А.С., Бездольный В.В., Гончаров Е.И. Навигационная безопасность при лоцманской проводке судов. - Николаев-Одесса: Феникс, 2007 г.-456 с. 5. Мальцев А.С., Май Б.Л. Устройство для предупреждения столкновения судов. - А.С. № 622275А, MriKG08G3/02. Опубликовано в Б.И. № 12, приоритет от 15.12.2003 г. 6. Харин В.М., Занько О.Н., Декин Б.Г., Писклов В.Т. Судовые машины, установки, устройства и системы. - М.: Транслит, 2010 г.-646 с. 7. Бронштейн Д.Я. Устройство и основы теории судна. - Л.: Судостроение, 1988 г.-336 с. 8. Рябченко В.К., Кучер Ю.Л. Устройство судна. - Одесса: Феникс, 2006 г.-118 с. 9. Фрид Е.Г. Устройство судна. - Л.: Судостроение, 1989 г.-340 с. 10. Вагущенко Л. Л., Вагущенко А. Л. Поддержка решений по расхождению с судами. -О.: Феникс, 2010 г.-294 с. 11. Мальцев А.С. Маневрирование судов при расхождении. - Одесса: ОНМА, 2008 г.-232 с. 12. Дыба В.Г., Позолотин Л.А., Чистяков В.Л. Управление безопасностью судна. - Одесса: Автограф, 2004 г.-334 с. 13. Снопков В.И. Управление судном. - М.: Транспорт, 1991 г.-360 с. 14. www.mir-forum.ru/files/materials/ sozvezdie.pdf. Судовые системы. 2011 г. 15. ГОСТ Р22.0.09 Безопасность в чрезвычайных ситуациях на акваториях. Термины и определения. Государственный стандарт РФ от 25.05.1995. 16. Патент РФ № 2318187 от 15.06.2006. ОАО ЦНИИ "Курс" Устройство для проведения судна (УПС) по узким участкам фарватера. 17. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М. Радио и связь. 1984. 18. Nebabin V. G. Methods and Techniques of Radar Recognition. Boston-London. Artech House. 1995. 19. Multisensor Data Fusion and Applications. Paramond K. Varshney Siracuse University, New York. 13244. USA. 20. Патент США № 7.102.496. МПК В 60 Q 1/00. Опубл. 05.09.2006. Multi-sensor integration for a vehicle. 4 UA 104333 C2 5 21. Небабин В.Г., Гришин В.К. Методы и техника радиолокационного распознавания. Современное состояние, тенденция развития, перспективы. Зарубежная радиоэлектроника. 1992, № 10, с. 5-20. 22. Небабин В.Г. Выбор параметров РЛС для распознавания. Радиотехника. Москва. 1990, №5, с. 16-18. 23.Fiorian Hessen. Retter und Berger von Personen. Airbags ausgenustereugen 2001, № 3, p. 19. 24. http://www.jcwiki.ru ФОРМУЛА ВИНАХОДУ 10 15 20 25 30 1. Спосіб зменшення аварійності руху надводного чи підводного судна за наявності підводних і надводних потенційно небезпечних об'єктів (ПНО), що включає постійний прийом даних супутникових навігаційних систем, даних від РЛС, автоматичної ідентифікаційної системи, визначення місцеположення судна, вирахування швидкості судна, глибини під кілем та уникнення пошкодження судна при зіткненні, який відрізняється тим, що додатково виконуються наступні операції: одержують тримірне зображення підводної обстановки з усіх сторін судна: спереду, з боків і позаду, для чого використовують гідролокатори в передній, задній, лівій та правій областях; у разі виявлення ПНО, їх розпізнають розпізнавальним пристроєм і обирають оптимальний спосіб запобігання зіткненню судна з ПНО та розраховують траєкторію ухилення від ПНО. 2. Спосіб за п. 1, який відрізняється тим, що у випадку, при виявленні та розпізнанні ПНО в безпосередній близькості від судна, при неможливості уникнення зіткнення простим маневруванням, визначають та використовують пасивний захист у вигляді зовнішніх повітряних подушок на корпусі судна, які надувають в місці можливого зіткнення судна з ПНО, при цьому для уникнення нахилу судна на один бік, з іншої сторони судна симетрично спрацьовують такі ж самі подушки. 2. Спосіб за п. 1, який відрізняється тим, що у випадку, при виявленні та розпізнанні ПНО в безпосередній близькості від судна, при неможливості уникнення зіткнення простим маневруванням, використовують активний захист у вигляді струменів води під великим тиском від водометів під водою. 3. Спосіб за п. 1, який відрізняється тим, що для підводного судна огляд водного простору здійснюють і в верхній півсфері. 5 UA 104333 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюNebabin Viktor Heorhiiovych
Автори російськоюНебабин Виктор Георгиевич
МПК / Мітки
МПК: B63C 11/00, B63C 9/02, G08G 3/00, G01C 21/20
Мітки: судна, зменшення, надводного, аварійних, різних, підводного, аварійності, спосіб, руху, сітуаціях
Код посилання
<a href="https://ua.patents.su/8-104333-sposib-zmenshennya-avarijjnosti-rukhu-nadvodnogo-chi-pidvodnogo-sudna-v-riznikh-avarijjnikh-situaciyakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб зменшення аварійності руху надводного чи підводного судна в різних аварійних ситуаціях</a>
Спосіб забезпечення гарантованого безаварійного руху надводного чи підводного судна в різних аварійних ситуаціях за наявності підводних і надводних потенційно небезпечних об’єктів
Номер патенту: 73118
Опубліковано: 10.09.2012
Автор: Небабін Віктор Георгійович
МПК: B60W 30/00, B60Q 1/00
Мітки: забезпечення, гарантованого, сітуаціях, потенційно, руху, підводних, надводного, надводних, підводного, аварійних, різних, судна, спосіб, об'єктів, наявності, безаварійного, небезпечних
Формула / Реферат:
1. Спосіб забезпечення гарантованого безаварійного руху надводного чи підводного судна в різних аварійних ситуаціях за наявності підводних і надводних потенційно небезпечних об'єктів (ПНО) в тому числі в надзвичайних умовах, коли за допомогою звичайного маневрування судном неможливо уникнути зіткнення з ПНО, що включає постійний прийом даних супутникових навігаційних систем, даних від РЛС, автоматичної ідентифікаційної системи, визначення...
Сингулярний спосіб забезпечення гарантованого безаварійного руху транспортного засобу в різних аварійних ситуаціях
Номер патенту: 62506
Опубліковано: 25.08.2011
Автор: Небабін Віктор Георгійович
МПК: G08G 1/16, G08G 5/00, B60Q 1/00, B60W 30/06
Мітки: засобу, аварійних, гарантованого, руху, спосіб, забезпечення, транспортного, сингулярний, безаварійного, різних, сітуаціях
Формула / Реферат:
1. Сингулярний спосіб забезпечення гарантованого безаварійного руху транспортного засобу в різних аварійних ситуаціях, що включає визначення місцеположення транспортного засобу (ТЗ), прийом інформації про дорожню обстановку, відображення на дисплеї ТЗ отриманої інформації з урахуванням дорожньої обстановки, який відрізняється тим, що на ТЗ встановлюють супутникову систему навігації і систему об'єктивного контролю керуючого ТЗ, а перед...
Сингулярний спосіб забезпечення безаварійного руху транспортного засобу в аварійних ситуаціях
Номер патенту: 102564
Опубліковано: 25.07.2013
Автор: Небабін Віктор Георгійович
МПК: B60R 21/00, G08G 1/16, B60Q 11/00
Мітки: сингулярний, безаварійного, аварійних, сітуаціях, транспортного, спосіб, руху, засобу, забезпечення
Формула / Реферат:
1. Сингулярний спосіб забезпечення найменшого травмування перешкоди, у тому числі пішохода, та пошкодження транспортного засобу (ТЗ) при їх зіткненні, що включає визначення місцеположення транспортного засобу, прийом інформації про дорожню обстановку, відображення на дисплеї ТЗ отриманої інформації з урахуванням дорожньої обстановки, при цьому на ТЗ для визначення його місцеположення встановлюють супутникову систему навігації і систему...
Спосіб зниження опору води руху судна
Номер патенту: 68507
Опубліковано: 16.08.2004
Автори: Чорний Анатолій Петрович, Казакєвіч Вячєслав Івановіч, Хільський В'ячеслав Петрович
Мітки: зниження, спосіб, руху, води, судна, опору
Формула / Реферат:
1. Спосіб зниження опору води руху судна, що полягає у зниженні загальної та місцевої шорсткості підводної поверхні його корпуса, боротьбі з обростанням і корозією корпуса нанесенням покриття на нього, який відрізняється тим, що підводну поверхню корпуса судна покривають пластинами або стрічками із гуми, які закріплюють на ньому, наприклад, водостійким клеєм.2. Спосіб за п. 1, який відрізняється тим, що пластинами або стрічками із гуми...
Пристрій для зменшення гідродинамічного опору суден при великих швидкостях руху
Номер патенту: 46883
Опубліковано: 17.06.2002
Автори: Юрченко Валерій Іванович, Юрченко Іван Валерійович, Юрченко Андрій Валерійович
МПК: B63B 1/32
Мітки: швидкостях, зменшення, пристрій, суден, руху, гідродинамічного, опору, великих
Формула / Реферат:
Пристрій для зменшення гідродинамічного опору суден при великих швидкостях руху, що складається з циліндричних коліс, встановлених на корпусі судна, який відрізняється тим, що на колесах встановлено замкнену еластичну стрічку, яка є основним елементом контакту судна з поверхнею води, колеса виконано спрямовуючими і вибірково ведучими з амортизацією, причому ведучі колеса виконано з можливістю рухатись під дією рушія тільки після виходу судна...
Попередній патент: Придатні для термоформування багатошарові плівки та блістерні упаковки, виготовлені з них
Наступний патент: Спосіб та система інтерактивного медіателекомунікаційного зв’язку
Випадковий патент: Поршневий компресор безкривошипно-безшатунного типу