Спосіб гіроскопічної стабілізації лідара в площині горизонту і пристрій для його здійснення
Номер патенту: 108816
Опубліковано: 10.06.2015
Автори: Дубінскій Андрєй Ігорєвіч, Дубинський Ігор Миколайович
Формула / Реферат
1. Спосіб гіроскопічної стабілізації лідара в площині горизонту, що включає встановлення лідара на верхню поверхню гіроплатформи, що стабілізується, пов'язаної з опорною конструкцією, розташованою на несучій поверхні рухомого об'єкта, віброізоляцію гіроплатформи шляхом забезпечення її пружного безкарданного зв'язку з опорною конструкцією, просторову стабілізацію гіроплатформи шляхом забезпечення її маятникового підвісу, за рахунок додаткового її навантаження нижньою поверхнею, та додаткової гіроскопічної стабілізації платформи з лідаром за допомогою інерційного гіростабілізатора, під'єднаного до нижньої поверхні, який відрізняється тим, що просторову стабілізацію лідара відносно лінії горизонту здійснюють шляхом переведення гіроплатформи у підвішений стан в атмосфері відносно несучої поверхні рухомого об'єкта, за рахунок створення зниженого тиску у вакуумній порожнині з еластичною бічною поверхнею, яку розташовують між верхньою і нижньою поверхнями гіроплатформи так, що нерухомий і рухливий торці бічної еластичної поверхні вакуумної порожнини жорстко з'єднують з опорною конструкцією пристрою і з гіроплатформою, відповідно, при цьому умову переходу гіроплатформи з лідаром у підвішений стан визначають із співвідношення:
![]() ,
,
де: ![]() - атмосферний тиск, Па;
- атмосферний тиск, Па;
![]() - ефективна площа рухомої торцевої поверхні вакуумної порожнини, м2;
- ефективна площа рухомої торцевої поверхні вакуумної порожнини, м2;
![]() - загальна маса гіроплатформи з лідаром і нижньої поверхні з інерційним гіростабілізатором, кг;
- загальна маса гіроплатформи з лідаром і нижньої поверхні з інерційним гіростабілізатором, кг;
![]() - прискорення вільного падіння, м/ с2.
- прискорення вільного падіння, м/ с2.
2. Спосіб за п. 1, який відрізняється тим, що як інерційний гіростабілізатор використовують вакуумний насос з обертовими турбінами, яким здійснюють також відкачування робочого середовища з вакуумної порожнини.
3. Пристрій для гіроскопічної стабілізації лідара в площині горизонту, який включає гіроплатформу з лідаром, що стабілізується, яка має маятниковий ефект, виконану у вигляді двох жорстко з'єднаних між собою нижньої і верхньої поверхонь, та з'єднану за допомогою пружного безкарданова зв'язку з опорними стійками опорної конструкції пристрою, встановленими на несучій поверхні рухомого об'єкта, інерційний гіростабілізатор, приєднаний до нижньої поверхні гіроплатформи, який відрізняється тим, що пристрій містить додаткову опорну поверхню, жорстко закріплену на опорних стійках, і розташовану між верхньою і нижньою поверхнями гіроплатформи з лідаром вакуумну порожнину з еластичною бічною поверхнею і отворами, пов'язаними, через канали відкачування/напуску в неї робочого середовища, з вакуумними насосами, і додаткові з'єднувальні штанги, при цьому верхній торець бічної еластичної поверхні вакуумної порожнини вакуумно-щільно приєднаний до додаткової опорної поверхні опорної конструкції пристрою, нижній рухливий торець вакуумної порожнини жорстко приєднаний до нижньої поверхні гіроплатформи, а нижня і верхня поверхні гіроплатформи жорстко пов'язані між собою з'єднувальними штангами.
4. Пристрій за п. 3, який відрізняється тим, що на нижню рухливу поверхню гіроплатформи, що стабілізується, встановлено щонайменше три інерційних гіростабілізатори з вектором кінетичного моменту, спрямованим по вертикалі місця під кутом 20-65º до площини рухомої торцевої поверхні вакуумної порожнини, які радіально симетрично розташовані відносно її центру.
5. Пристрій за п. 3 або 4, який відрізняється тим, що як інерційні гіростабілізатори використані вакуумні насоси з обертовими турбінами.
6. Пристрій за будь-яким з пп. 3-5, який відрізняється тим, що отвори і канали відкачування/напуску робочого середовища у вакуумну порожнину розміщені на додатковій опорній поверхні пристрою або на рухомій торцевій поверхні вакуумної порожнини.
Текст
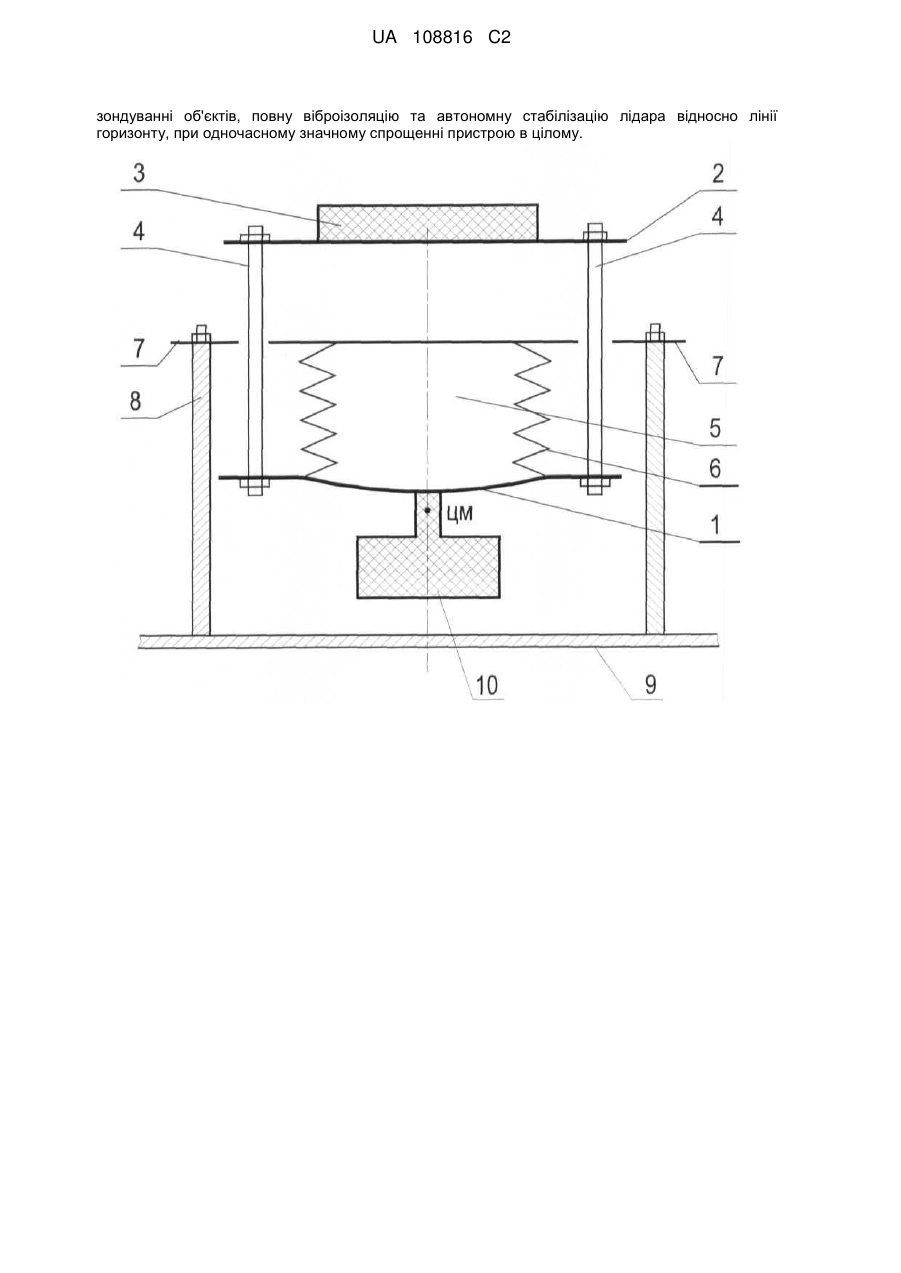
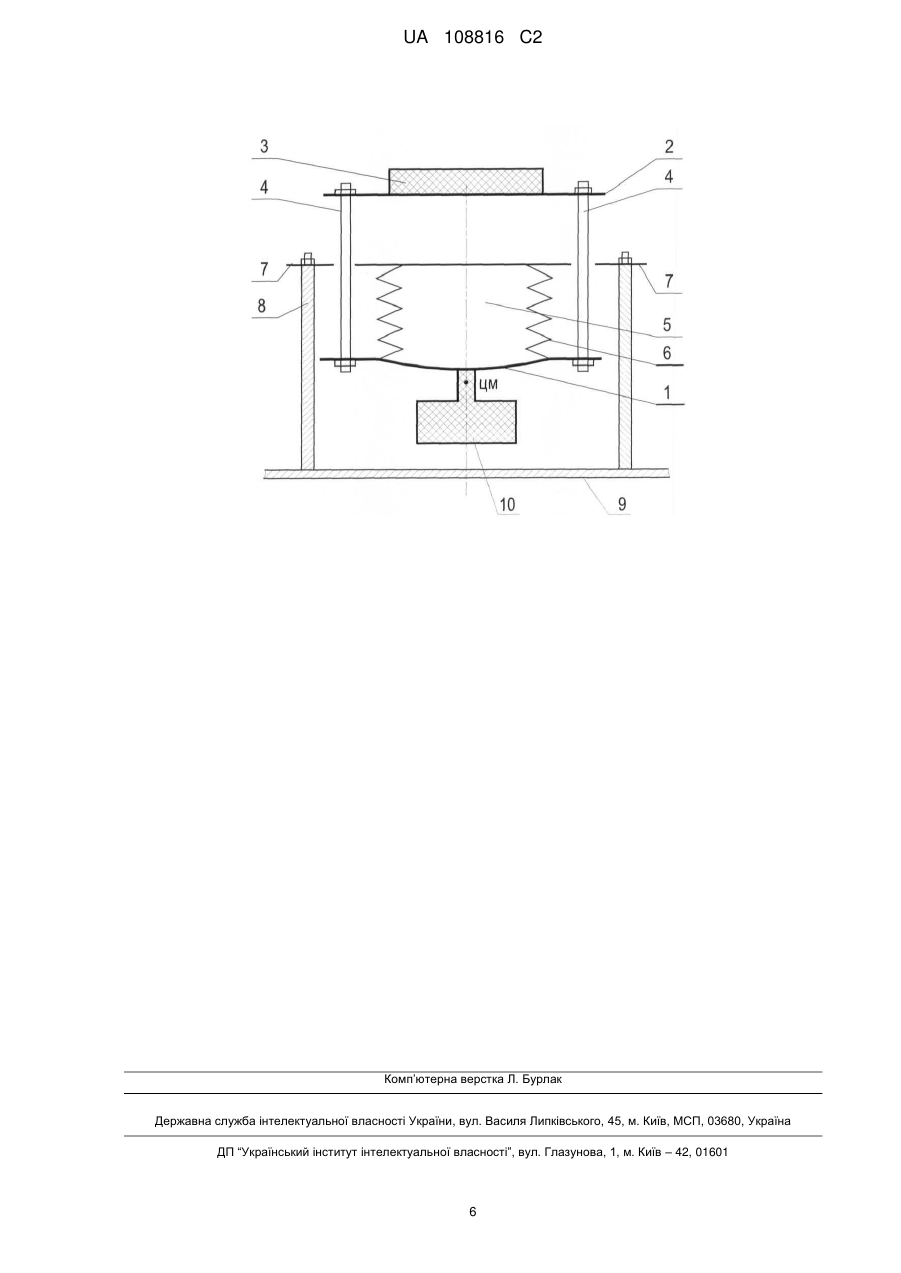
Реферат: Винахід належить до галузі віброзахисної техніки і призначений для віброізоляції та гіроскопічної стабілізації відносно площини горизонту мобільних лідарів і пов'язаних з ними систем навігації, лазерних далекомірів та іншого подібного обладнання, розташованого на наземних транспортних засобах пересування або водних видах транспорту. Заявлений спосіб включає встановлення лідара на верхню поверхню гіроплатформи, що стабілізується, пов'язаної з опорною конструкцією, віброізоляцію гіроплатформи шляхом забезпечення її пружного безкарданного зв'язку з опорною конструкцією та просторову стабілізацію лідара відносно лінії горизонту шляхом переведення гіроплатформи у підвішений стан в атмосфері відносно поверхні рухомого об'єкта, за рахунок створення зниженого тиску у вакуумній порожнини з еластичною бічною поверхнею, яку розташовують між верхньою і нижньою поверхнями гіроплатформи. Умову переходу гіроплатформи з лідаром у підвішений стан визначають із заявленого співвідношення. Пристрій для реалізації заявленого способу містить гіроплатформу, виконану у вигляді нижньої поверхні і верхньої поверхні із встановленим на ній лідаром, жорстко з'єднаних між собою штангами, вакуумну порожнину, верхній торець якої приєднаний до опорної поверхні, а нижній рухливий її торець приєднаний до нижньої поверхні. Опорна поверхня жорстко закріплена на опорних стійках, встановлених на несучій поверхні рухомого об'єкта. До нижньої поверхні приєднаний інерційний гіростабілізатор. Винахід забезпечує підвищення надійності і точності напрямку лінії прицілу лідара у просторі при UA 108816 C2 (12) UA 108816 C2 зондуванні об'єктів, повну віброізоляцію та автономну стабілізацію лідара відносно лінії горизонту, при одночасному значному спрощенні пристрою в цілому. UA 108816 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі віброзахисної техніки і призначений для віброізоляції та гіроскопічної стабілізації відносно площини горизонту об'єктів щодо опори, яка стикається з твердою або рідкою підстиляючою поверхнею, і може під час руху зазнавати впливу ударів та коливань. Зокрема, технічне вирішення, що заявляється, може бути використане для стабілізації в площині горизонту мобільних лідарів, розташованих на наземних транспортних засобах пересування або водних видах транспорту. Відомий спосіб пасивної силової гіростабілізаціі для гасіння коливань корабля відносно осі крену, заснований на безпосередньому використанні стабілізуючих властивостей (прецесійного руху) гіроскопа. Коли дія хвиль, що розгойдують корабель, перетворюється заспокоювачем в коливання рами з гіроскопом (История механики гироскопических систем. М.: Наука, 1975, с.83). Основним елементом використовуваного при цьому заспокоювача, є двоступеневий гіроскоп, вектор кінетичного моменту якого спрямований уздовж вертикалі місця, з маятниковим гальмом для заспокоєння коливань рами підвісу, на якій встановлено вантаж для стабілізації всієї системи. Відомий також спосіб віброізоляції шляхом обмеження передачі виділеної ззовні енергії коливань і ударів механічно-чутливим об'єктам (Виброизолирующая система для блока инерциальных датчиков; патент RU № 2219498). Використовуваний при цьому пристрій, дозволяє забезпечити стабілізацію об'єкта в площині горизонту внаслідок установки пружних елементів безкарданного підвісу, що забезпечують можливість малого кутового переміщення рами по двох ортогональних осях. У цьому пристрої карданний підвіс замінений ортогонально розташованими чотирма пружними елементами і демпферами, на які встановлено лідар з корпусом. Ці пружні елементи з демпферами дають можливість малого кутового переміщення, аналогічно кутовим поворотам відносно осей рамок карданного підвісу. За своїм принципом роботи ці пристрої, призначені для реалізації вищеописаних способів вібростабілізації об'єктів, являють собою складні механічні конструкції з контрольованими зворотними зв'язками, які зменшують амплітуду коливань, але не усувають їх повністю. Тому, що в них завжди існують жорсткі механічні зв'язки з несучою поверхнею рухомого об'єкта (транспортного засобу). Найбільш близьким до технічного вирішення, що заявляється, є спосіб гіроскопічної стабілізації лідара в площині горизонту шляхом гасіння зовнішніх вібраційних механічних впливів на положення лінії прицілу лідара при зондуванні об'єктів, за рахунок застосування пружно-в'язких зв'язків маятникової конструкції, на якій встановлено лідар, з опорною конструкцією, розташованою на несучій поверхні рухомого об'єкта, а також, за рахунок маятникового підвісу цієї платформи (Устройство гироскопической стабилизации лидара в плоскости горизонта; патент RU № 2329468). Використовуваний при цьому пристрій містить гірорамну конструкцію, що стабілізується, і яка має маятниковий ефект та складається із верхньої і нижньої кільцевих поверхонь, жорстко пов'язаних між собою укосинами. На верхній поверхні розташований лідар. Рамна конструкція, через пружні елементи (пружини і демпфери), закріплена на опорних стійках (кронштейнах), встановлених на несучій поверхні рухомого об'єкта. При цьому, до нижньої кільцевої поверхні приєднаний гіродвигун з вектором кінетичного моменту, спрямованим уздовж вертикалі місця. Такий пристрій дозволяє частково вирішити завдання усунення дії зовнішніх вібраційних механічних впливів на положення лінії прицілу лідара при зондуванні об'єктів. Завдяки тому, що в робочому режимі лідара зовнішні вібраційні механічні дії будуть гаситися, в тому числі, у пружних елементах, що працюють як фільтр частот, за рахунок істотної різниці власної низької частоти підвішеного механічного маятника, а також будуть гаситися в паралельно встановлених в'язких демпферах. Однак недоліком даного пристрою є те, що його маятникова система, що складається з лідара та елементів корпусу, має центр мас нижче площини встановлення пружних елементів і демпферів. У зв'язку з цим, виникає необхідність застосовувати досить потужні пружні елементи, які не зможуть повністю здійснювати гасіння коливань від зовнішніх механічних впливів і, відповідно, забезпечувати ефективну віброізоляцію лідара. Задачею винаходу, що заявляється, є підвищення надійності і точності напрямку лінії прицілу лідара у просторі при зондуванні об'єктів, за рахунок виключення складних механічних систем зворотних зв'язків і датчиків, і забезпечення повної віброізоляції та автономної стабілізації лідара відносно лінії горизонту, при одночасному значному спрощенні пристрою віброізоляції в цілому. Поставлена задача вирішується тим, що у способі гіроскопічної стабілізації лідара в площині горизонту, що включає встановлення лідара на верхню поверхню гіроплатформи, що 1 UA 108816 C2 5 10 15 20 25 30 35 40 45 50 55 стабілізується, пов'язаної з опорною конструкцією, розташованою на несучій поверхні рухомого об'єкта; віброізоляцію гіроплатформи шляхом забезпечення її пружного безкарданного зв'язку з опорною конструкцією; просторову стабілізацію гіроплатформи шляхом забезпечення її маятникового підвісу, за рахунок додаткового її навантаження нижньою поверхнею, і додаткової гіроскопічної стабілізації платформи з лідаром за допомогою інерційного гіростабілізатора, під'єднаного до нижньої поверхні, новим є те, що просторову стабілізацію лідара відносно лінії горизонту здійснюють шляхом переведення гіроплатформи у підвішений стан в атмосфері відносно несучої поверхні рухомого об'єкта, за рахунок створення зниженого тиску у вакуумній порожнини з еластичною бічною поверхнею, яку розташовують між верхньою і нижньою поверхнями гіроплатформи. При цьому нерухомий і рухливий торці бічної еластичної поверхні вакуумної порожнини жорстко з'єднують з опорною конструкцією пристрою і з гіроплатформою, відповідно. Умову переходу гіроплатформи з лідаром у підвішений стан визначають із співвідношення: mg PaSef f 0 , де: Pa - тиск атмосфери, Па; Sef f - ефективна площа рухомої торцевої поверхні вакуумної порожнини, м2; m - загальна маса гіроплатформи з лідаром і нижньої поверхні з інерційним гіростабілізатором, кг; g - прискорення вільного падіння, м/с2. Як інерційний гіростабілізатор використовують вакуумний насос з обертовими турбінами, яким здійснюють також відкачування робочого середовища з вакуумної порожнини. Поставлена задача вирішується також тим, що у пристрої для гіроскопічної стабілізації лідара в площині горизонту, який включає гіроплатформу з лідаром, що стабілізується, яка має маятниковий ефект, виконану у вигляді двох жорстко з'єднаних між собою нижньої і верхньої поверхонь, та з'єднану, за допомогою пружного безкарданного зв'язку, з опорними стійками опорної конструкції пристрою, встановленими на несучій поверхні рухомого об'єкта; інерційний гіростабілізатор, приєднаний до нижньої поверхні гіроплатформи, новим є те, що пристрій додатково містить: додаткову опорну поверхню, жорстко закріплену на опорних стійках, і розташовану між верхньою і нижньою поверхнями гіроплатформи з лідаром; вакуумну порожнину з еластичною бічною поверхнею і отворами, пов'язаними через канали відкачки/напуску в неї робочого середовища, з вакуумними насосами; додаткові з'єднувальні штанги. При цьому верхній торець бічної еластичної поверхні вакуумної порожнини вакуумно-щільно приєднаний до додаткової опорної поверхні опорної конструкції пристрою, нижній рухливий торець вакуумної порожнини жорстко приєднаний до нижньої поверхні гіроплатформи, а нижня і верхня поверхні гіроплатформи жорстко пов'язані між собою з'єднувальними штангами. Новим у пристрої є також те, що на нижню рухливу поверхню гіроплатформи, що стабілізується, встановлено щонайменше три інерційних гіростабілізатори з вектором кінетичного моменту, спрямованим по вертикалі місця під кутом 20° - 65° до площини рухомої торцевої поверхні вакуумної порожнини, які радіально симетрично розташовані відносно її центру. Новим у пристрої є також те, що як інерційні гіростабілізатори використані вакуумні насоси з обертовими турбінами (валами). Новим у пристрої є також те, що отвори і канали відкачки/напуску робочого середовища у вакуумну порожнину можуть бути розміщені на додатковій опорній поверхні пристрою або на рухомій торцевій поверхні вакуумної порожнини. Зазначена сукупність ознак заявленого технічного рішення сприяє досягненню поставленої задачі наступним чином. У заявленому способі гіроскопічної стабілізації використовується принцип вакуумноатмосферного переходу у підвішений стан (левітацію) лідара відносно опорної конструкції. Тобто, об'єкт (лідар), що підлягає віброізоляції, практично "плаває" в атмосфері відносно опори, чим забезпечується незалежний безконтактний його підвіс відносно несучої поверхні транспортного засобу. Це дозволяє виключити складні механічні системи зворотних зв'язків і датчиків, і забезпечити практично повну віброізоляцію і автономну стабілізацію відносно лінії горизонту об'єкта (лідара) практично будь-якої заданої ваги при досить великих амплітудах коливань несучої поверхні рухомого транспортного засобу, на якому він розташований. 2 UA 108816 C2 5 10 15 20 25 30 35 40 45 50 55 Стабілізуючим елементом відносно горизонту є інерційний гіростабілізатор, який утримує верхню поверхню з лідаром, що перебуває у повітрі, у підвішеному стані в площині горизонту, коли, при зміні кутової швидкості несучої поверхні рухомого транспортного засобу (корпусу корабля, автомобіля), виникає момент гіроскопічної реакції, спрямований протилежно моменту, викликаному зовнішніми коливаннями. Використання, згідно з заявленим технічним рішенням, щонайменше трьох інерційних гіростабілізаторів з вектором кінетичного моменту, спрямованим по вертикалі місця під середнім кутом 450 до площини рухомої торцевої поверхні вакуумної порожнини, дозволить утримати лідар у просторі в трьох координатах X, Y, Z відносно лінії горизонту. Коли, при коливаннях / нахилах несучої поверхні транспортного засобу у будь-якій із трьох площин, лідар буде жорстко утримуватися векторами кінетичного моменту строго у площині горизонту. Жорстко пов'язані між собою з'єднувальними штангами верхня і нижня рухливі поверхні гіроплатформи, з центром мас нижче рухомої поверхні, утворюють маятникове гальмо пасивної стабілізації, що дозволяє додатково стабілізувати об'єкт (лідар), що підлягає віброізоляції, від коротких бічних вібрацій. Схема пристрою, який реалізує спосіб гіроскопічної стабілізації лідара в площині горизонту, що заявляється, представлена на кресленні. Пристрій містить гіроплатформу, що має маятниковий ефект, виконану у вигляді нижньої поверхні 1 і верхньої поверхні 2 із встановленим на ній лідаром 3, жорстко з'єднаних між собою штангами 4. Пристрій також містить вакуумну порожнину 5 з еластичною бічною поверхнею 6, верхній торець якої вакуумно-щільно приєднаний до опорної поверхні 7, а нижній рухливий торець порожнини 5 жорстко приєднаний до нижньої поверхні 1 гіроплатформи. При цьому опорна поверхня 7 жорстко закріплена на опорних стійках 8 опорної конструкції пристрою, встановлених на несучій поверхні 9 рухомого об'єкта. До нижньої поверхні 1 гіроплатформи приєднаний інерційний гіростабілізатор 10. Згідно з технічним рішенням, що заявляється, отвори і канали відкачки/напуску робочого середовища в вакуумну порожнину 5 (на схемі не показані) можуть бути розміщені на опорній поверхні 7 пристрою (коли вакуумний насос розташований поруч з рухомими вузлами конструкції) або на рухомій торцевій поверхні 4 вакуумної порожнини (коли вакуумний насос розташований на рухомій поверхні), що залежить від умов експлуатації пристрою. Опорна поверхня 7 може бути виконана будь-якої, конструктивно виправданої форми (прямокутної, кільцевої, хрестоподібної і т.і.), але забезпечувати при цьому вакуумнощільне прилягання до неї вакуумної порожнини. Для забезпечення фіксації лідара в похідному положенні, між верхньою поверхнею 2 і опорною поверхнею 7 розташовують фіксуючі пружні елементи, наприклад гумові бобишки (на схемі не показані), на які опускається поверхня 2 з лідаром з робочого положення. Заявлений спосіб реалізується в цьому пристрої таким чином. У вихідному (похідному) положенні вакуумна порожнина 5 наповнена атмосферою (газом), а її бічна еластична поверхня 6 розтягнута так, що верхня поверхня 2, із встановленим на ній лідаром 3, перебуває у нерухомому положенні на фіксуючих елементах. При переведенні об'єкта стабілізації (лідара) 3 в робоче положення, здійснюють відкачування атмосфери (робочого газу) в вакуумній порожнині 5 до критичного тиску, при якому бічна еластична поверхня 6 стискається під дією сили атмосферного тиску (CAT). При цьому, гіроплатформа з лідаром піднімається і переходить в левітуючий (підвішений) стан в атмосфері. Дію левітуючої сили САД можна розглядати як окремий випадок дії закону Архімеда в атмосфері. Підйомна левітуюча сила прикладена до рухомої поверхні 1 вакуумної порожнини 5, яка знаходиться на кордоні двох середовищ - атмосфери і вакууму, а нерухомий торець бічної поверхні 6 вакуумної порожнини 5 закріплений на опорній поверхні 7, встановленій на опорних стійках 8. Левітація об'єкта в атмосфері відносно опори відбувається, якщо виконується умова: mg PaSef f 0 , (1) де: Sef f - ефективна площа рухомої торцевої поверхні вакуумної порожнини, м2; m - загальна маса гіроплатформи з лідаром і нижньої поверхні з інерційним гіростабілізатором, кг; g - прискорення вільного падіння, м/с2. 3 UA 108816 C2 При цьому тиск P0 у вакуумній порожнини повинен бути набагато менше атмосферного тиску Pa . 5 10 15 20 25 30 35 40 45 50 55 При досягненні критичного тиску P0 усередині порожнини, рухлива поверхня 1 з інерційним гіростабілізатором 10 і верхня поверхня 2 з лідаром 3, що утворюють маятникову гіростабілізовану систему загальною масою m , піднімаються вгору під дією сили САД і переходять у робоче положення, перебуваючи в левітуючому (підвішеному) стані в атмосфері відносно опорної поверхні 7 і несучої поверхні 9 рухомого об'єкта. Цей стан, у даному випадку, відповідає стану стабільної рівноваги, і вакуумний насос відключається, якщо немає натікання газу у вакуумну порожнину. Подальше зниження тиску практично не впливає на умову левітації об'єкту. При цьому, якщо тиск P0 зменшуватиметься від 0,05 Pa і нижче, то сила САД практично не змінюється, що дозволяє системі ефективно працювати при низьких значеннях вакууму без значних витрат енергії на відкачування атмосфери. Лідар 3 піднімається відносно опори за рахунок зовнішньої сили САД, діючої на зовнішню сторону рухомої поверхні 1 з боку атмосфери, тобто практично "плаває" в атмосфері без впливу на нього будь-яких механічних зв'язків. З формули (1) випливає, що загальна вага маятникової системи з лідаром, що піднімається, повинна бути пропорційною площі рухомої поверхні: m k Sef f , де k Pa / g . 3 Прості оцінки для вакуумної порожнини об'ємом 1 м і площею рухомої торцевої поверхні 1 2 м показують, що сила САД з якою атмосфера діє на рухому торцеву поверхню дорівнюватиме 101300 Н. 3 Тому, заявлений пристрій, що має вакуумну порожнину обсягом 1 м з площею рухомої 2 торцевої поверхні 1 м , може підняти тіло вагою 10 000 кг на висоту до 1м і утримувати його в підвішеному - робочому стані необхідний час, якщо тиск P0 у вакуумній порожнині буде значно менше Pa . При цьому бокова поверхня вакуумної порожнини може бути досить тонкою, виконаною з будь-якого вакуумно-щільного еластичного матеріалу і будь-якої форми, оскільки не бере участі у підтриманні лідара у підвішеному стані, а виконує розділову роль між повітряним і вакуумним середовищами. Одночасно з початком відкачування вакуумної порожнини, вмикається інерційний гіростабілізатор для гіроскопічної стабілізації лідара в площині горизонту. Як інерційний гіростабілізатор може бути застосований турбомолекулярний або роторний насос, який вакуумно-щільно перпендикулярно прикріплюється до площини рухомої поверхні 1. У цьому випадку він виконує дві функції - підтримує вакуум в порожнині і гіростабілізує лідар, за рахунок обертання вала зі швидкостями до 30 000 обертів/хвилину, одночасно будучи складовою частиною маятникової системи. Для приведення пристрою в початковий похідний стан, відкачування з вакуумної порожнини припиняється і здійснюється природний напуск повітря у вакуумну порожнину до атмосферного тиску Pa . Сили, що діють на рухому поверхню 1, вирівнюються, при цьому верхня поверхня 2 з лідаром опускається, під дією сили тяжіння, на пружні елементи опорної поверхні 7 в похідний стан. Для усунення можливих впливів звукових коливань і поривів вітру, вакуумна порожнина може бути захищена звукоізольованим корпусом, який прикріплюється до корпусу транспортного засобу. Запропоновані спосіб гіростабілізації лідара в площині горизонту і пристрій, що його реалізує, дозволяють: утримувати у підвішеному (левітуючому) стані в атмосфері об'єкт стабілізації (лідар) практично будь-якої розрахункової ваги без механічного підвісу будь-якого типу, зберігаючи лідар строго в заданому положенні відносно площини горизонту, при досить великих кутах коливань несучої поверхні рухомого об'єкта (корпусу транспортного засобу); демпфірувати коливання об'єкта стабілізації (лідара) за допомогою його переведення у підвішений (левітуючий) стан в атмосфері щодо опори, при цьому, лідар утримується в площині горизонту, при виникненні коливань несучої поверхні транспортного засобу, за рахунок гіроскопічного моменту стабілізації та маятникового ефекту пасивної стабілізації; 4 UA 108816 C2 5 10 15 20 25 30 35 40 45 50 55 усувати коливання лінії прицілу лідара в необхідному діапазоні частот, що виникають під час роботи будь-яких вібруючих бортових пристроїв транспортного засобу. При цьому пристрій має підвищену надійність, простоту обслуговування і може ефективно застосовуватися як на наземних транспортних засобах, так і морських судах різноманітного призначення. Пристрій може успішно використовуватися для віброзахисту і гіроскопічної стабілізації лідарів і пов'язаних з ними систем навігації, лазерних далекомірів та іншого подібного обладнання, яке потребує жорсткої контрольованої прив'язки до віддаленого об'єкта. ФОРМУЛА ВИНАХОДУ 1. Спосіб гіроскопічної стабілізації лідара в площині горизонту, що включає встановлення лідара на верхню поверхню гіроплатформи, що стабілізується, пов'язаної з опорною конструкцією, розташованою на несучій поверхні рухомого об'єкта, віброізоляцію гіроплатформи шляхом забезпечення її пружного безкарданного зв'язку з опорною конструкцією, просторову стабілізацію гіроплатформи шляхом забезпечення її маятникового підвісу, за рахунок додаткового її навантаження нижньою поверхнею, та додаткової гіроскопічної стабілізації платформи з лідаром за допомогою інерційного гіростабілізатора, під'єднаного до нижньої поверхні, який відрізняється тим, що просторову стабілізацію лідара відносно лінії горизонту здійснюють шляхом переведення гіроплатформи у підвішений стан в атмосфері відносно несучої поверхні рухомого об'єкта, за рахунок створення зниженого тиску у вакуумній порожнині з еластичною бічною поверхнею, яку розташовують між верхньою і нижньою поверхнями гіроплатформи так, що нерухомий і рухливий торці бічної еластичної поверхні вакуумної порожнини жорстко з'єднують з опорною конструкцією пристрою і з гіроплатформою, відповідно, при цьому умову переходу гіроплатформи з лідаром у підвішений стан визначають із співвідношення: mg PaSeff 0 , де: Pa - атмосферний тиск, Па; 2 Seff - ефективна площа рухомої торцевої поверхні вакуумної порожнини, м ; m - загальна маса гіроплатформи з лідаром і нижньої поверхні з інерційним гіростабілізатором, кг; 2 g - прискорення вільного падіння, м/с . 2. Спосіб за п. 1, який відрізняється тим, що як інерційний гіростабілізатор використовують вакуумний насос з обертовими турбінами, яким здійснюють також відкачування робочого середовища з вакуумної порожнини. 3. Пристрій для гіроскопічної стабілізації лідара в площині горизонту, який включає гіроплатформу з лідаром, що стабілізується, яка має маятниковий ефект, виконану у вигляді двох жорстко з'єднаних між собою нижньої і верхньої поверхонь, та з'єднану за допомогою пружного безкарданова зв'язку з опорними стійками опорної конструкції пристрою, встановленими на несучій поверхні рухомого об'єкта, інерційний гіростабілізатор, приєднаний до нижньої поверхні гіроплатформи, який відрізняється тим, що пристрій містить додаткову опорну поверхню, жорстко закріплену на опорних стійках, і розташовану між верхньою і нижньою поверхнями гіроплатформи з лідаром вакуумну порожнину з еластичною бічною поверхнею і отворами, пов'язаними, через канали відкачування/напуску в неї робочого середовища, з вакуумними насосами, і додаткові з'єднувальні штанги, при цьому верхній торець бічної еластичної поверхні вакуумної порожнини вакуумно-щільно приєднаний до додаткової опорної поверхні опорної конструкції пристрою, нижній рухливий торець вакуумної порожнини жорстко приєднаний до нижньої поверхні гіроплатформи, а нижня і верхня поверхні гіроплатформи жорстко пов'язані між собою з'єднувальними штангами. 4. Пристрій за п. 3, який відрізняється тим, що на нижню рухливу поверхню гіроплатформи, що стабілізується, встановлено щонайменше три інерційних гіростабілізатори з вектором кінетичного моменту, спрямованим по вертикалі місця під кутом 20-65º до площини рухомої торцевої поверхні вакуумної порожнини, які радіально симетрично розташовані відносно її центру. 5. Пристрій за п. 3 або 4, який відрізняється тим, що як інерційні гіростабілізатори використані вакуумні насоси з обертовими турбінами. 6. Пристрій за будь-яким з пп. 3-5, який відрізняється тим, що отвори і канали відкачування/напуску робочого середовища у вакуумну порожнину розміщені на додатковій опорній поверхні пристрою або на рухомій торцевій поверхні вакуумної порожнини. 5 UA 108816 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюDubynskyi Ihor Mykolaiovych, Dubynskyi Andrii Ihorovych
Автори російськоюДубинский Игорь Николаевич, Дубинский Андрей Игоревич
МПК / Мітки
МПК: G01C 21/18
Мітки: здійснення, пристрій, лідара, спосіб, площині, гіроскопічної, стабілізації, горизонту
Код посилання
<a href="https://ua.patents.su/8-108816-sposib-giroskopichno-stabilizaci-lidara-v-ploshhini-gorizontu-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб гіроскопічної стабілізації лідара в площині горизонту і пристрій для його здійснення</a>
Спосіб гіроскопічної стабілізації лідара в площині горизонту
Номер патенту: 92443
Опубліковано: 11.08.2014
Автори: Дубинський Ігор Миколайович, Дубінскій Андрєй Ігорєвіч
МПК: G01C 21/18
Мітки: лідара, стабілізації, горизонту, площині, гіроскопічної, спосіб
Формула / Реферат:
1. Спосіб гіроскопічної стабілізації лідара в площині горизонту, що включає встановлення лідара на верхню поверхню гіроплатформи, що стабілізується, пов'язаної з опорною конструкцією, розташованою на несучій поверхні рухомого об'єкта; віброізоляцію гіроплатформи шляхом забезпечення її пружного безкарданового зв'язку з опорною конструкцією; просторову стабілізацію гіроплатформи шляхом забезпечення її маятникового підвісу, за рахунок...
Спосіб контролю горизонту при розробці родовища та пристрій для його здійснення, спосіб ідентифікації структури корисної копалини та пристрій для його здійснення
Номер патенту: 89535
Опубліковано: 10.02.2010
Автори: Релстон Джонатон Кері, Харгрейв Чад Оуен, Хейнсворт Девід Уільям, Келлі Майкл Шоун, Макфі Рональд Джон, Райд Девід Чарльз
МПК: E21C 35/08
Мітки: розробці, ідентифікації, здійснення, контролю, родовища, спосіб, корисної, пристрій, копалини, горизонту, структури
Формула / Реферат:
1. Спосіб контролю горизонту при розробці родовища, де видобуту копалину вирубають з очисного забою пласта породи, у якому:вирубають копалину з пласта врубовим пристроєм, що оголює свіжу поверхню після вирубування копалини,спостерігають інфрачервоне випромінювання свіжої поверхні після вирубування копалини у місці безпосередньо біля врубового пристрою,визначають будь-яку ділянку температурного контрасту від дослідження...
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині і пристрій для його здійснення
Номер патенту: 19834
Опубліковано: 15.01.2007
Автори: Козлинський Мирослав Петрович, Денис Василь Володимирович
МПК: B60C 23/00
Мітки: спосіб, вертикальний, центра, засобу, положення, колісного, здійснення, площині, ваги, пристрій, транспортного, визначення
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс при прямолінійному русі під час гальмування колісного транспортного засобу, визначають величини вертикальних і горизонтальних навантажень на кожне із коліс, за якими визначають...
Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення
Номер патенту: 14905
Опубліковано: 04.03.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: елемента, рухомого, пристрій, положення, здійснення, напрямної, аеростатичної, спосіб, стабілізації
Формула / Реферат:
1. Способ стабилизации положения подвижного элемента аэростатической, направляющей, включающий регулирование величин зазоров между основанием подвижного элемента и поверхностью неподвижного элемента, отличающийся тем, что в подвижном элементе аэростатической направляющей, установленном в начальном положении, закрепляют не менее трех блоков датчиков величин зазоров, включающих каждый по два датчика величины зазора, расположенных на одинаковом...
Спосіб збільшення швидкості обертання та стабілізації обертання ротора двигуна та пристрій для його здійснення
Номер патенту: 24268
Опубліковано: 07.07.1998
Автори: Ткач Анатолій Анатолійович, Надєін Владислав Семенович
Мітки: двигуна, ротора, пристрій, збільшення, швидкості, обертання, стабілізації, здійснення, спосіб
Формула / Реферат:
1. Способ увеличения скорости вращения и стабилизации вращения ротора двигателя, при котором текущую среду направляют на прижатые к упорам в просвете рамочного маха вращающиеся части составной лопасти, внешнюю и внутреннюю, циклическим воздействием этих частей на упоры рамочного маха с одновременным переводом вращающихся частей других составных лопастей во флюгерное положение, вращают ротор, отличающийся тем, что увеличение мощности и КПД...
Попередній патент: Ріжучий пристрій для нитяного матеріалу
Наступний патент: Спосіб експлуатації системи допомоги водію для оптимізації параметрів ефективності та/або критеріїв якості сільськогосподарської робочої машини
Випадковий патент: Спосіб лікування демодекозу