Спосіб автоматичного тотального геодезичного контролю деформацій інженерних споруд
Номер патенту: 115261
Опубліковано: 10.10.2017
Автори: Брик Ярослав Петрович, Малік Тетяна Миколаївна, Бурачек Всеволод Германович


Формула / Реферат
Спосіб автоматичного тотального геодезичного контролю деформацій інженерних споруд, оснований на технології автоматичного вимірювання деформацій за допомогою оптико-електронних ліній із взаємним візуванням приладів, який відрізняється тим, що формують оптико-електронні створні лінії в три пучки паралельних регулярних ліній, напрямки яких орієнтують за трьома головними осями споруди, таким чином з точок перетину створних ліній утворюють ![]() об'ємну просторову матрицю, яка складається з множини матриць
об'ємну просторову матрицю, яка складається з множини матриць ![]() , де
, де ![]() і
і ![]() - число матриць, відповідно
- число матриць, відповідно ![]() ,
, ![]() і
і ![]() - по осях споруди
- по осях споруди ![]() ,
, ![]() ,
, ![]() , при цьому в безпосередній близькості до точок перетину ліній розміщують шестиканальні оптико-електронні прилади з цифровими камерами, які контролюють деформації по напрямках, перпендикулярних до створних ліній по осях
, при цьому в безпосередній близькості до точок перетину ліній розміщують шестиканальні оптико-електронні прилади з цифровими камерами, які контролюють деформації по напрямках, перпендикулярних до створних ліній по осях ![]() ,
, ![]() ,
, ![]() , об'ємними пікселями просторової матриці
, об'ємними пікселями просторової матриці ![]() є малі області елементів споруди, центральні точки яких є точками перетину створних ліній.
є малі області елементів споруди, центральні точки яких є точками перетину створних ліній.
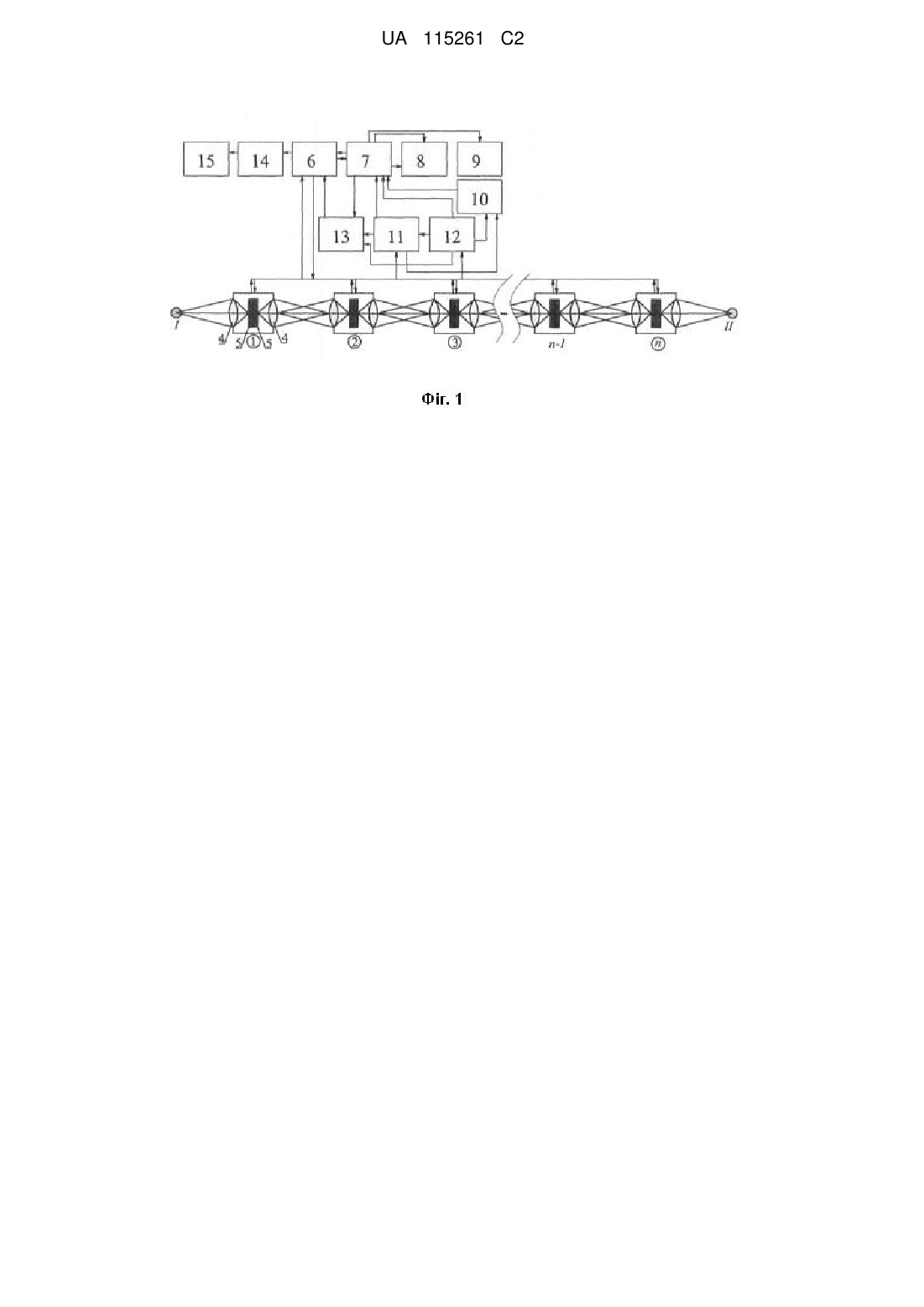
Текст
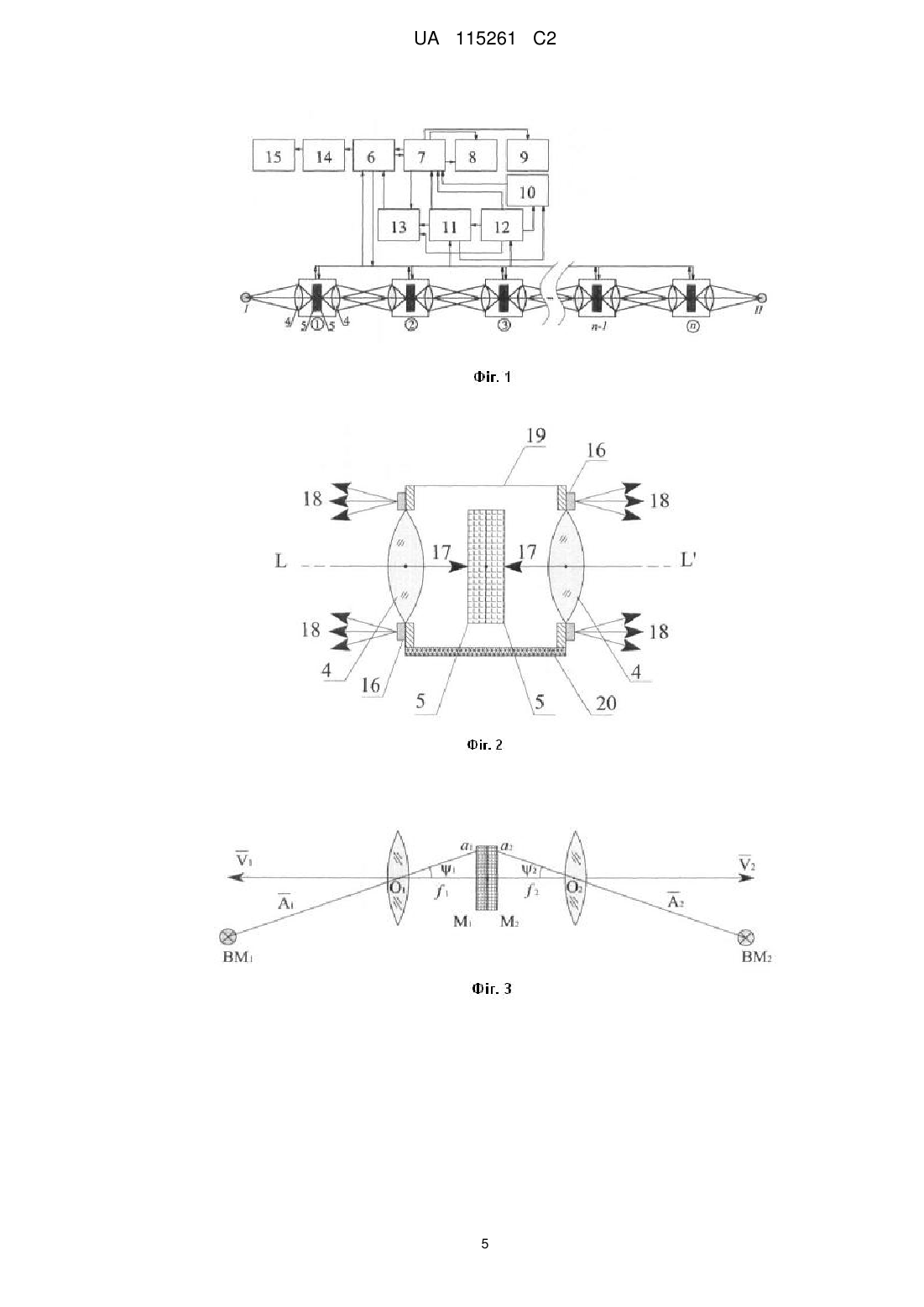
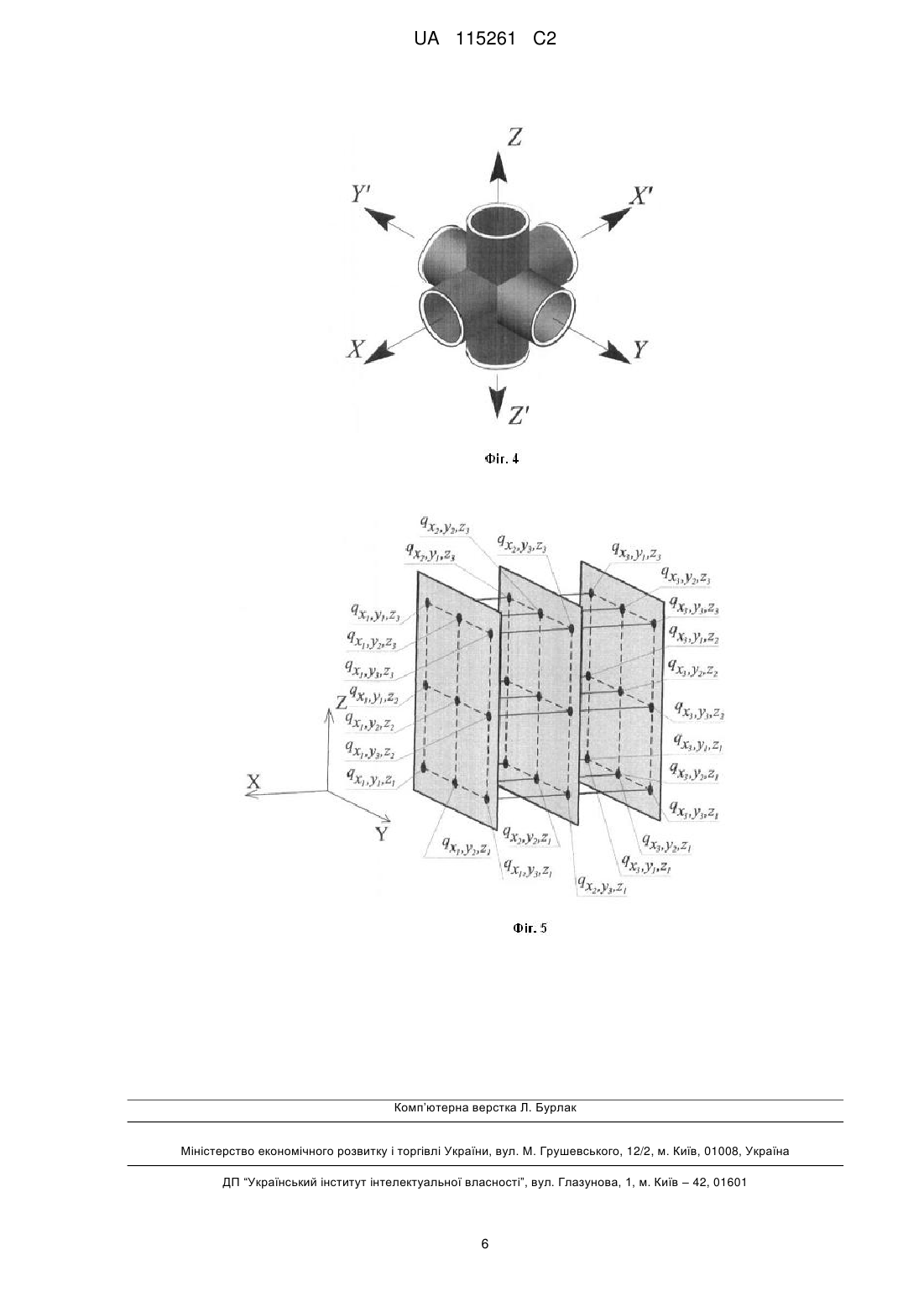
Реферат: Запропонований спосіб автоматичного тотального геодезичного контролю деформацій інженерних споруд належить до галузі інженерної геодезії. Спосіб автоматичного тотального геодезичного контролю деформацій інженерних споруд, оснований на технології автоматичного вимірювання деформацій за допомогою оптикоелектронних ліній із взаємним візуванням приладів, згідно з винаходом, що оптико-електронні створні лінії формують в три пучки паралельних регулярних ліній, напрямки яких орієнтують за трьома головними осями споруди, таким чином з точок перетину створних ліній утворюють 3D об'ємну просторову матрицю, яка складається з множини матриць M3D MX i MY j MZ k , де i 1 n , j 1 m і k 1 e - число матриць, відповідно MX , MY і MZ - по осях споруди X , Y , Z . При , , , цьому в безпосередній близькості до точок перетину ліній розміщують шестиканальні оптикоелектронні прилади з цифровими камерами, які контролюють деформації по напрямках, перпендикулярних до створних ліній по осях X , Y , Z . Об'ємними пікселями просторової матриці M3DY,Z є малі області елементів споруди, центральні точки яких є точками перетину X, створних ліній. UA 115261 C2 (12) UA 115261 C2 UA 115261 C2 5 10 15 20 25 Спосіб автоматичного тотального геодезичного контролю деформацій інженерних споруд належить до галузі інженерної геодезії. Відомо традиційні способи і засоби визначення деформацій споруд, в тому числі створні, створно-оптичні, струнні, струнно-оптичні [1, 2], високоточне інженерно-геодезичне нівелювання [3], а також способи геодезичної засічки [3]. Основними недоліками цих способів є великий об'єм ручної праці, відсутність оперативності контролю. В [4] описано спосіб тотального вимірювання стану елементів споруди по їх фізичних характеристиках (міцність, тиск, напружено-деформований стан) за допомогою таких пристроїв як тензометричні давачі, інклінометри, що реалізується системою [4]. До недоліків даного способу можна віднести недостатню точність внаслідок можливості вимірювати безпосередньо величини деформацій конструкцій споруди. В [5] описано спосіб побудови створної лінії на основі фотоелектричного ланцюга деформаційних марок (ДМ), який є аналогом, прийнятим за прототип дійсного винаходу. Недоліками способу [5] є відсутність додаткового контролю величини зміщення ДМ і тотального контролю деформацій у всьому об'ємі інженерної споруди. Як аналог можна прийняти спосіб [5], що має загальний принцип із запропонованим (оптикоелектронний зв'язок деформаційних марок), а як прототип - спосіб [4] (загальна ознака тотальний контроль деформацій негеодезичними методами). Задачею винаходу є створення способу автоматичного суцільного (тотального) геодезичного контролю деформацій інженерної споруди, що забезпечує вимірювання величин деформацій споруди у всьому його об'ємі з підвищеною точністю і оперативністю. Поставлена задача вирішується за рахунок створення способу автоматичного тотального геодезичного контролю деформацій інженерних споруд, основаного на технології автоматичного вимірювання деформацій за допомогою оптико-електронної лінії із взаємним візуванням приладів, згідно з винаходом, оптико-електронні створні лінії формують в три пучки паралельних регулярних ліній, напрямки яких орієнтують за трьома головними осями споруди, таким чином з точок перетину створних ліній утворюють 3D об'ємну просторову матрицю, яка 3D складається з множини матриць M MX i MY j MZ k , де i 1,n , j 1,m і k 1, e - число 30 матриць, відповідно MX , MY і MZ - по осях споруди X , Y , Z . При цьому в безпосередній близькості до точок перетину ліній розміщують шестиканальні оптико-електронні прилади з цифровими камерами, які контролюють деформації по напрямках, перпендикулярних до 3D 35 40 45 50 55 створних ліній по осях X , Y , Z . Об'ємними пікселями просторової матриці M X, Y,Z є малі області елементів споруди, центральні точки яких - точки перетину створних ліній. Технічним результатом є підвищення точності вимірювання деформацій і складне (тотальне) охоплення контрольними вимірюваннями всього об'єму інженерної споруди, включаючи всі внутрішні конструкції, а також підвищена оперативність контролю деформацій. Запропонований спосіб реалізується за допомогою системи, опис якої додається нижче. Основною складовою ланкою даної системи автоматичного тотального геодезичного контролю є ланцюг оптико-електронних деформаційних марок, що утворює створну лінію [5]. На кресленні (фіг.1) показано узагальнену схему оптико-електронної створноїлінії на лінійній ділянці інженерної споруди, яка складається з оптико-електронних приладів деформаційних марок. На схемі позначено основні блоки створної лінії: 1, 2, 3, … n-1, n -оптико-електронні прилади-деформаційні марки; І, II - візирні марки опорних геодезичних знаків створу; 4 – об'єктиви цифрових фотокамер, встановлених в оправах; 5 – блоки подвійних фотоелектричних матриць; 6 – блок управління; 7 – блок обробки інформації; 8 – блок індикації; 9 – блок запису й зберігання інформації; 10 – блок оцінювання стану міцності конструкції; 11 – блок моніторингу осадки ΔZ; 12 – блок моніторингу деформацій просторової мережі ΔX , ΔY , ΔZ ; 13 – блок оцінювання техногенної ситуації; 14 – блок сигналізації та оповіщення; 15 – засоби зв’язку; 16 – світлові елементи джерел світла; 1 UA 115261 C2 5 10 15 20 17 – створні лінії; 18 – світлові потоки від візирних марок; 19 – корпус оптико-електронного приладу; 20 – основа оптико-електронного приладу. При включенні системи, в результаті взаємного візування приладів 1, 2, 3, …, n-1, n на матрицях 5 утворюються відліки і по результатах цих даних виконується обробка в блоці 6, потім обчислюють величини змін координат деформаційних марок. Конструкція оптико-електронного приладу - ДМ схематично представлена на фіг. 2. Корпуси 19 приладів жорстко встановлені своїми основами 20 на конструкціях інженерної споруди і по суті є деформаційними марками. Створна лінія співпадає із загальною віссю системи (L-L') і зображення візирних марок 18, сформоване кожним об'єктивом, буде знаходитися в певній точці робочий мішені відповідного багатоелементного фотоприймача (матриці) 5. Щоб вимірювати величину відхилення приладів від створу лінії необхідно виміряти величину лінійного зсуву зображення пучка променів, сформованого об'єктивом в робочій площині фотоприймача. При цьому світлові потоки від візирних марок падають на об'єктиви, які фокусують зображення марок на мішенях фотоприймачів. З фотоприймачів через блок управління 6 в блок обробки інформації 7 потрапляють електричні сигнали про величини відхилень зображень марок від номінального положення, зафіксованого в пам'яті пристрою (в блоці 9) при первинному включенні системи. При горизонтальному розташуванні осі схеми (фіг. 2) отримують суми відліків на фотоприймачах (матрицях) 5, які дорівнюють нулю. Оптико-електронні пари каналів кожного приладу приймають світлові промені (вектори A 1 і A 2 ), що йдуть від візирних марок BM1 і BM2 , через об'єктиви O1 і O 2 , які формують зображення візирних марок відповідно на фото приймальних матрицях M1 і M2 і утворюють з векторами 25 візирних осей приладу V1 і V2 малі кути 1 і 2 (фіг. 3) [6]. Отримані зображення візирних марок BM1 і BM2 на матрицях M1 і M2 перетворюються в електричні сигнали з відліками a1 і a 2 величин проекцій променів A 1 і A 2 на двох осях кожної з матриць. Кут меж векторами A 1 і A 2 фокусні 30 35 180 або робочі відстані a a2 1 a a 2 180 1 f f2 , де f1 f2 f 1 буде дорівнювати об'єктивів O1 і O2 камер приладу, 206265 ; отже . Внаслідок малих кутів i і малих відхилень приладу від створу, похибками другого і вище порядків можна знехтувати. Важливою властивістю приладу ДМ є нечуттєвість його до нахилів і поворотів на малі кути, тобто при будь-яких відхиленнях приладу на кут між векторами променів (направлених на центри візирних марок) завжди буде дорівнювати сумі відліків на суміжних лініях подвійної фотоприймальної матриці, тобто f i 1 180 a " 1 aі" 2 f , де i1 - кут при вершині в точці встановлення приладу і 1 ; 40 " a1 , aі" 2 - відліки по лініях матриць приладу і 1 при візуванні на прилад і і і 2 ; f - фокусні відстані об'єктивів оптико-електронних камер приладу ПФЕЛ; 206265 . Запропонований спосіб реалізується системою, основним елементом якої є ланцюг оптикоелектронних деформаційних марок, що утворює створну лінію. Тут, застосовуючи двоканальні марки (фіг. 3) вздовж створеної, лінії маємо лінійно-кутовий 45 50 хід з кутами i , близькими до 180° в вершинах 2, 3,…, n-1. Даний хід спирається на дві опорні марки [7]. Таким чином, рішення задачі створних вимірювань в даному випадку зводиться до визначення величини деформацій елементів конструкцій споруди відносно їх початкового положення, при цьому, враховуючи близькість деформаційних марок до створної лінії, можна відраховувати деформації елементів по напрямках, перпендикулярних до створної лінії від створної лінії або від проектної лінії відповідної осі інженерної споруди. 2 UA 115261 C2 5 10 Перехід від окремих створнихліній-ланцюгів ДМ до просторової оптико-електронної мережі ДМ пов'язано із застосуванням шестиканальних оптико-електронних приладів ДМ, кожний з яких має три двоканальні блоки подвійного взаємного візування, де схему такого блоку показано на фіг. 4, з орієнтацією по напрямку осей інженерної споруди X , Y , Z . При використанні шестиканальних приладів (фіг. 4) з розташуванням візирних осей каналів паралельних головним осям споруди в триосній системі координат X , Y , Z отримаємо в об'ємі споруди три паралельних пучки створних ліній по напрямках головних осей. На фіг. 5 на прикладі утворення пучка паралельних створних ліній по напрямку осі X показано принцип побудови системи трьох паралельних пучків проектних створних ліній в об'ємі споруди, при цьому кожний пучок складається з дев'яти створних ліній. Пучок ліній ( X ) перетинає пучки створних ліній по напрямках осей Y і Z , які знаходяться в площинах, паралельних площині YOZ , при цьому на перетині створних ліній цих трьох пучків утворюються q 15 так звані деформаційні точки x i , y j ,z k i 1, n, j 1, m, k 1, e , де i , j , k - число точок на відповідній створній лінії. В зоні перетину кожної трійки створних ліній (по напрямках осей X , Y , Z ) встановлюють шестиканальні деформаційні оптико-електронні марки, тим самим утворюють об'ємну просторову геодезичну мережу ДМ. Суворо кажучи, деформаційні марки не знаходяться точно q 20 25 на лінії проектних створних ліній інженерної споруди, тому за початкові відліки точок x i , y j ,z k приймають нульові значення по всім точкам на проектних лініях. Таким чином, будемо вважати, що в просторовій геодезичній мережі деформаційні марки знаходяться в точках перетину пучків створних ліній. Організацію цієї геодезичної мережі можна описати з позиції теорії множин як об'ємну тримірну деформаційну матрицю 3D . Множина деформаційних матриць Q включає в себе підмножини паралельних регулярних пучків проектних створних ліній деформаційних марок інженерної споруди: Q X , Q Y і QZ : Q X Q ; QY Q ; QZ Q , орієнтованих по трьох напрямках системи координат інженерної споруди. Кожне з даних підмножин Q X , Q Y і Q Z містить в свою чергу підмножини ланцюгів створних ліній ДМ: Q YZ Q ZX Q XY X , Y , Z , при цьому перетин цих підмножин мають вигляд: nml Q 30 i 1 j 1 k 1 X ,Y , Z , YZ ZX XY і, нарешті, кожний ланцюг - створна лінія ДМ Q X , Q Y i QZ є підмножиною, що складається з елементів q x yz Q yz , X q y zx Q zx , Y q z xy Q xy , Z YZ q xyz : q xyz Q X 35 Q X QY Q Z , x p : p i, n, y r : r 1, m, z s : s 1, e qx i ,y j ,z k Q Q ZX Y XY Z , . q xyz x 2 y 2 z 2 , тобто елементи q утворені перетином створних ліній деформаційних марок і є точками відліку для визначення відхилень Множини елементів qx i ,y j ,z k q x i , y j , zk . можна представити як просторову фізичну матрицю 3D , яка M 40 Yj складається з підмножин плоских матриць MXi , і M Z k , в кожному з яких містяться відповідно в площинах ZOY i , ZOX j , XOY k матриць. Кожна з матриць містить відхилення q по осях X , Y , Z , при цьому відхилення по осі, перпендикулярній до площини матриці можуть бути відображені у вигляді ізолінії" подібно зображенню горизонталей на топографічному плані. Об'єднання цих під множин має вигляд: 3 UA 115261 C2 XYZ M 3D 5 10 15 20 25 MX M M Y Z . В склад інженерно-геодезичного моніторингу складної інженерної споруди для рішення задачі просторового дослідження деформацій може бути включена система, подібна ГІС з автоматизацією обробки даних в реальному масштабі часу і візуалізацією деформаційної ситуації. Таким чином, запропонований спосіб автоматичного тотального геодезичного контролю деформацій інженерних споруд дозволяє здійснювати геодезичний контроль всього внутрішнього об'єму конструкції споруди в автоматичному режимі і реальному масштабі часу, підвищити точність контролю, а також рівень техногенної безпеки для персоналу і цінного обладнання. Джерела інформації: 1. Ямбаев Х.К. Высокоточные створные измерения / Х.К. Ямбаев - М: Недра, 1986. - 264 с. 2. Боровий В.О. Автоматизація геодезичних вимірювань / В.О. Боровий, Л.В. Борисюк, В.Г. Бурачек; під ред. В.О. Борового - Чернігів: КГТ "Видавництво - Чернігівські обереги", 2004. - 368 с. 3. Зайцев А.К. Геодезические методы исследования деформаций сооружений / А.К. Зайцев, С.В. Марфенко, Д.Ш. Михелев - М.: Недра, 1991. - 272 с. 4. Идиатуллин Д.Р. Система мониторинга состояния несущих конструкций реального времени (СМИК) / Д.Р. Идиатуллин, В.И. Клецин / Электронный журнал Предотвращение аварий зданий и сооружений. Номер: № ФС77-35253. //www.pamag.ru/pressa/smik-rv. 5. Патент України на винахід 85229 Спосіб автоматичного контролю техногенної безпеки магістральних нафтогазопроводів. Дата публікації 12.01.2009, бюл.1. 6. Дослідження шляхів підвищення точності геодезичних систем за рахунок створення нових оптико-електронних схем вимірювань: звіт про НДР (заключ.), №ДР 0113U003666 / Чернігівський державний інститут економіки і управління, Приватний вищий навчальний заклад Університет новітніх технологій; керівник роботи В.Г. Бурачек; виконавці: В.Г. Бурачек, Т.М. Малік, Д.В. Хомушко, В.Ю. Беленок. - К., 2013. - 172 с. 7. Мазин И.Д. Инженерно-геодезические работы при реконструкции промышленных объектов / И.Д. Мазин Справочное пособие. - М: Недра, 1991. – 216 с. 30 ФОРМУЛА ВИНАХОДУ 35 Спосіб автоматичного тотального геодезичного контролю деформацій інженерних споруд, оснований на технології автоматичного вимірювання деформацій за допомогою оптикоелектронних ліній із взаємним візуванням приладів, який відрізняється тим, що формують оптико-електронні створні лінії в три пучки паралельних регулярних ліній, напрямки яких орієнтують за трьома головними осями споруди, таким чином з точок перетину створних ліній утворюють 3D об'ємну просторову матрицю, яка складається з множини матриць M3D MX i MY j MZ k , де i 1 n , j 1 m і k 1 e - число матриць, відповідно MX , MY і MZ - по , , , 40 осях споруди X , Y , Z , при цьому в безпосередній близькості до точок перетину ліній розміщують шестиканальні оптико-електронні прилади з цифровими камерами, які контролюють деформації по напрямках, перпендикулярних до створних ліній по осях X , Y , Z , об'ємними пікселями просторової матриці M3DY,Z є малі області елементів споруди, центральні точки яких є X, точками перетину створних ліній. 4 UA 115261 C2 5 UA 115261 C2 Комп’ютерна верстка Л. Бурлак Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G02B 13/00, G01C 11/00
Мітки: автоматичного, деформацій, інженерних, споруд, геодезичного, контролю, спосіб, тотального
Код посилання
<a href="https://ua.patents.su/8-115261-sposib-avtomatichnogo-totalnogo-geodezichnogo-kontrolyu-deformacijj-inzhenernikh-sporud.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного тотального геодезичного контролю деформацій інженерних споруд</a>
Спосіб визначення планових координат верхнього геодезичного знаку вертикальної лінії на надвисоких інженерних спорудах
Номер патенту: 114959
Опубліковано: 28.08.2017
Автори: Малік Тетяна Миколаївна, Бурачек Всеволод Германович, Брик Ярослав Петрович
МПК: G01C 11/36
Мітки: знаку, геодезичного, інженерних, вертикальної, спорудах, визначення, лінії, координат, спосіб, надвисоких, планових, верхнього
Формула / Реферат:
1. Спосіб визначення планових координат верхнього геодезичного знаку вертикальної лінії на надвисоких інженерних спорудах, оснований на методі прямої лінійної засічки світловіддалемірними вимірюваннями, який відрізняється тим, що виконують геодезичну прив'язку центральних точок світловіддалемірів і нижнього геодезичного знаку в інженерній споруді в плані і по висоті з необхідною точністю, світловіддалеміри орієнтують на оптичні відбивачі, які...
Електромагнітна вимірювально-інформаційна система неруйнівного контролю параметрів напружено-деформованого стану інженерних конструкцій і споруд
Номер патенту: 75876
Опубліковано: 15.06.2006
Автори: Шокарев Віктор Семенович, Чаплигін Валерій Іванович, Мальцева Яна Валеріївна
МПК: G01M 19/00, G01N 27/90
Мітки: контролю, напружено-деформованого, інженерних, параметрів, неруйнівного, електромагнітна, стану, вимірювально-інформаційна, споруд, система, конструкцій
Формула / Реферат:
1. Електромагнітна вимірювально-інформаційна система неруйнівного контролю параметрів напружено-деформованого стану інженерних конструкцій і споруд, яка містить вимірювальні канали з електромагнітними датчиками, які складаються з первинного індуктивного перетворювача з рухомим циліндричним магнітопроводом, на якому розташовані по чотири ідентичних основних котушки індуктивності, ввімкнених випусками в основний комутатор котушок, з'єднаний...
Пристрій контролю відносних зміщень покрівлі, її вузлів і елементів, будівельних конструкцій, інженерних споруд і мереж
Номер патенту: 80482
Опубліковано: 27.05.2013
Автор: Магамедов Зуріко Валентинович
МПК: G01B 7/00
Мітки: пристрій, будівельних, мереж, зміщень, конструкцій, вузлів, покрівлі, контролю, споруд, елементів, інженерних, відносних
Формула / Реферат:
Пристрій контролю відносних зміщень покрівлі, її вузлів і елементів, будівельних конструкцій, інженерних споруд і мереж, що містить комунікаційний модуль та вимірювальний модуль, який складається з реперного блока та контрольного блока, який складається з робочої камери, чутливого елемента - тензодатчика, транзисторного нагрівального елемента, плати керування, захисного кожуха.
Пристрій для рятування з висотних інженерних споруд
Номер патенту: 46538
Опубліковано: 15.06.2004
Автори: Фаріонова Тетяна Анатоліївна, Бугаєнко Борис Андрійович, Галь Анатолій Феодосійович
МПК: B63B 23/00
Мітки: споруд, інженерних, рятування, висотних, пристрій
Формула / Реферат:
1. Пристрій для рятування з висотних інженерних споруд, що містить рятувальний засіб, роз'єднувальний механізм автоматичної віддачі гака, спусковий пристрій, який виконано у вигляді похилих напрямних, зв'язаних кореневими краями із висотною інженерною спорудою, який відрізняється тим, що напрямні виконано у вигляді жолоба, кінцевий край якого занурено у воду, при цьому похилий жолоб у напрямку до води виконано із прогином і містить по всій...
Система для вимірювання переміщень в елементі інженерних конструкції і споруд під дією навантажень

Номер патенту: 70477
Опубліковано: 11.06.2012
Автори: Бугаєць Наталія Володимирівна, Бєліков Едуард Анатолійович, Вітольберг Володимир Геннадійович, Астахов Віктор Миколайович, Даренський Олександр Миколайович
МПК: E01B 35/00, G05D 5/00
Мітки: елементи, інженерних, споруд, дією, система, навантажень, вимірювання, конструкції, переміщень
Формула / Реферат:
1. Система для вимірювання переміщень елементів інженерних конструкцій і споруд під дією навантажень, що містить інформаційний датчик, який закріплюється на елементі, яка відрізняється тим, що інформаційний датчик виготовлений у вигляді круга чорного кольору на білому матеріалі, що не намагнічується, діаметром 4-8 мм, а на відстані від 4 до 8 м від елемента, що діагностується, занурюють у ґрунт стійки, закріплюють до стійок платформу,...
Попередній патент: Пристрій формування регульованого потоку газу
Наступний патент: Радіоелектронний модуль
Випадковий патент: Пристрій для вимірювання деформації анкерного кріплення