Спосіб визначення планових координат верхнього геодезичного знаку вертикальної лінії на надвисоких інженерних спорудах
Номер патенту: 114959
Опубліковано: 28.08.2017
Автори: Малік Тетяна Миколаївна, Бурачек Всеволод Германович, Брик Ярослав Петрович
Формула / Реферат
1. Спосіб визначення планових координат верхнього геодезичного знаку вертикальної лінії на надвисоких інженерних спорудах, оснований на методі прямої лінійної засічки світловіддалемірними вимірюваннями, який відрізняється тим, що виконують геодезичну прив'язку центральних точок світловіддалемірів і нижнього геодезичного знаку в інженерній споруді в плані і по висоті з необхідною точністю, світловіддалеміри орієнтують на оптичні відбивачі, які встановлюють на верхньому геодезичному знаку інженерної споруди і, змінюючи частоту випромінювача імпульсів, фіксують відстані від світловіддалемірів до відбивачів верхнього геодезичного знаку на будівлі в моменти виникнення в каналах приймачів світловіддалемірів подвійної частоти випромінювання, обчислюючи ці відстані для кожного зі світловіддалемірів за формулою:
![]() ,
,
де ![]() - швидкість розповсюдження світла в атмосфері,
- швидкість розповсюдження світла в атмосфері,
![]() - частота випромінювання світлових імпульсів,
- частота випромінювання світлових імпульсів,
![]() - непарне число періодів подвійної частоти
- непарне число періодів подвійної частоти ![]() випромінювання імпульсів,
випромінювання імпульсів,
число ![]() визначають по наближеному значенню відстані
визначають по наближеному значенню відстані ![]() на великомасштабному плані з врахуванням кута нахилу світловіддалемірного променя і заокруглюють до цілого непарного числа:
на великомасштабному плані з врахуванням кута нахилу світловіддалемірного променя і заокруглюють до цілого непарного числа:
![]() ,
,
при цьому, враховуючи данні геодезичної прив'язки світловіддалемірів, по значенням дирекційних кутів напрямків "нижній геодезичний знак - центр світловіддалеміра" як мінімум для двох напрямків, визначають координати верхнього геодезичного знаку х і у в системі координат інженерної споруди.
2. Спосіб за п. 1, який відрізняється тим, що в умовах коливань інженерної споруди верхнього геодезичного знака відносно вертикалі по напрямкам X, Y системи координат інженерної споруди додатково модулюють сигнали з частотою ![]() більш низької частоти
більш низької частоти ![]() і за рахунок цього в межах коливання верхнього геодезичного знаку фіксують у відлікових каналах світловіддалемірів в моменти появи подвійної частоти
і за рахунок цього в межах коливання верхнього геодезичного знаку фіксують у відлікових каналах світловіддалемірів в моменти появи подвійної частоти ![]() величини відстаней "світловіддалемір - верхній геодезичний знак" і, перетворюючи ці дані в координати
величини відстаней "світловіддалемір - верхній геодезичний знак" і, перетворюючи ці дані в координати ![]() верхнього знаку, враховують координати нижнього знаку
верхнього знаку, враховують координати нижнього знаку ![]() , по різницям
, по різницям ![]() і
і ![]() та по моментам
та по моментам ![]() будують графіки динамічного положення верхнього геодезичного знаку по напрямкам осей X і Y, які використовують для контролю вертикальності конструкції інженерної споруди.
будують графіки динамічного положення верхнього геодезичного знаку по напрямкам осей X і Y, які використовують для контролю вертикальності конструкції інженерної споруди.
Текст
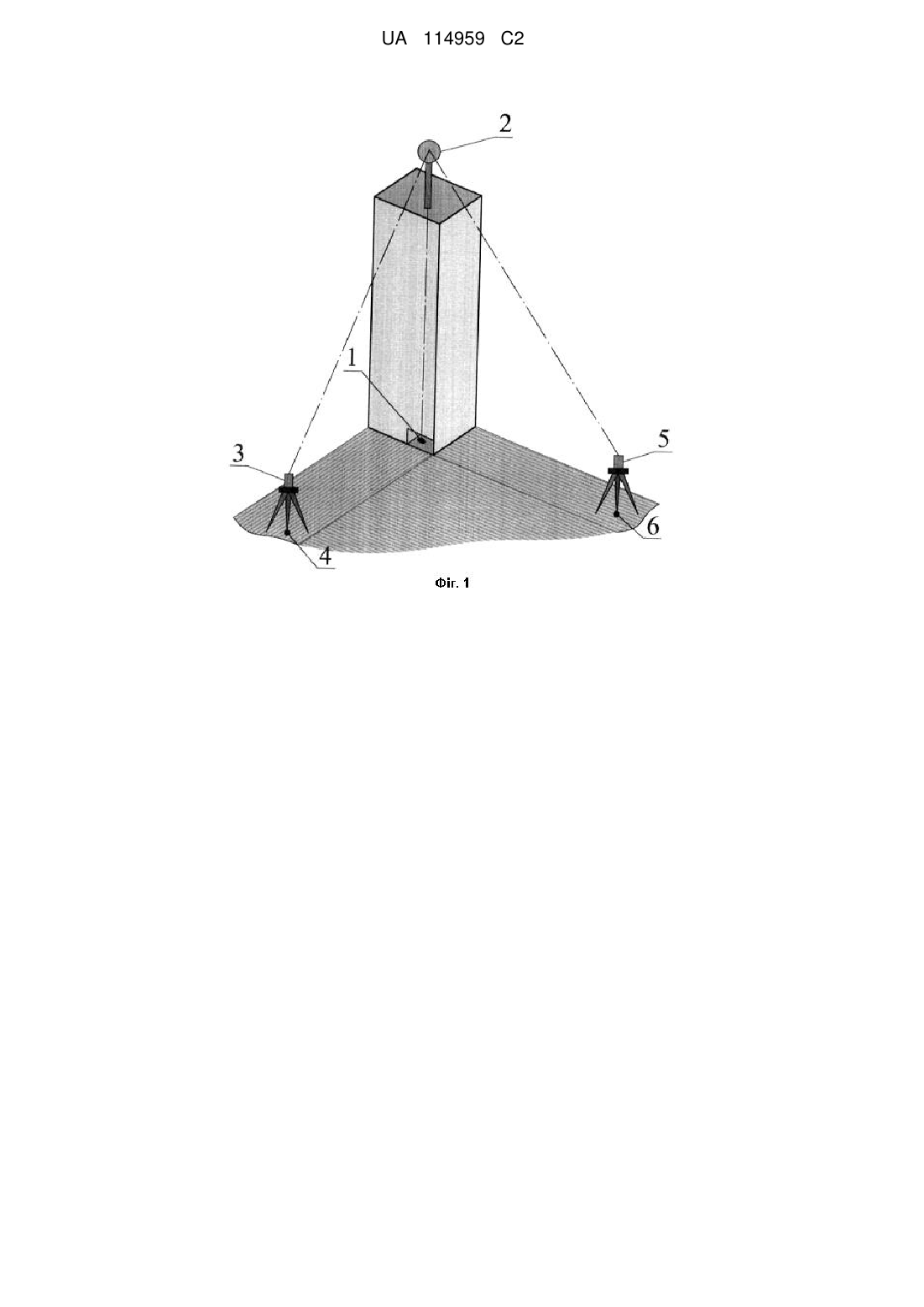
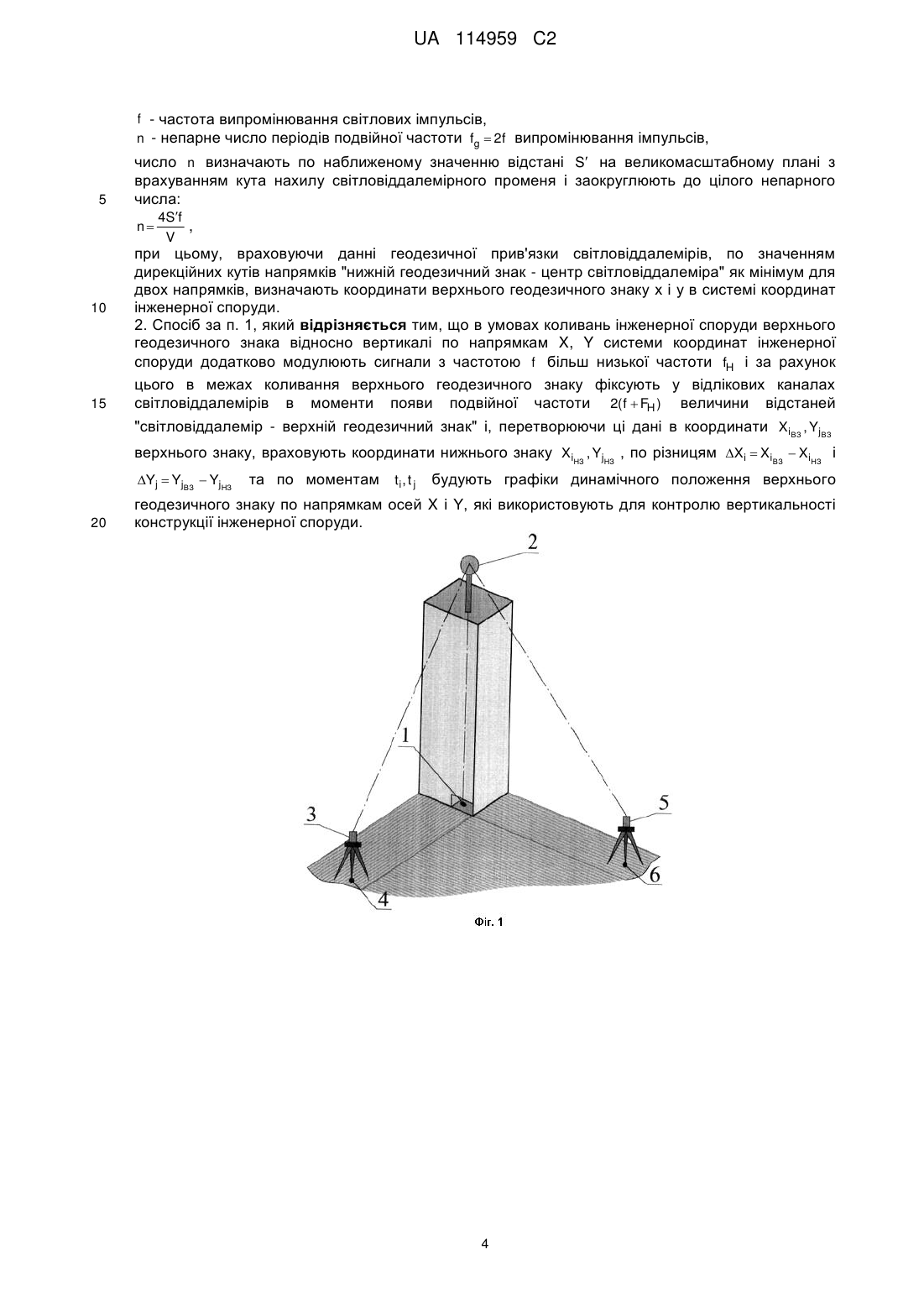
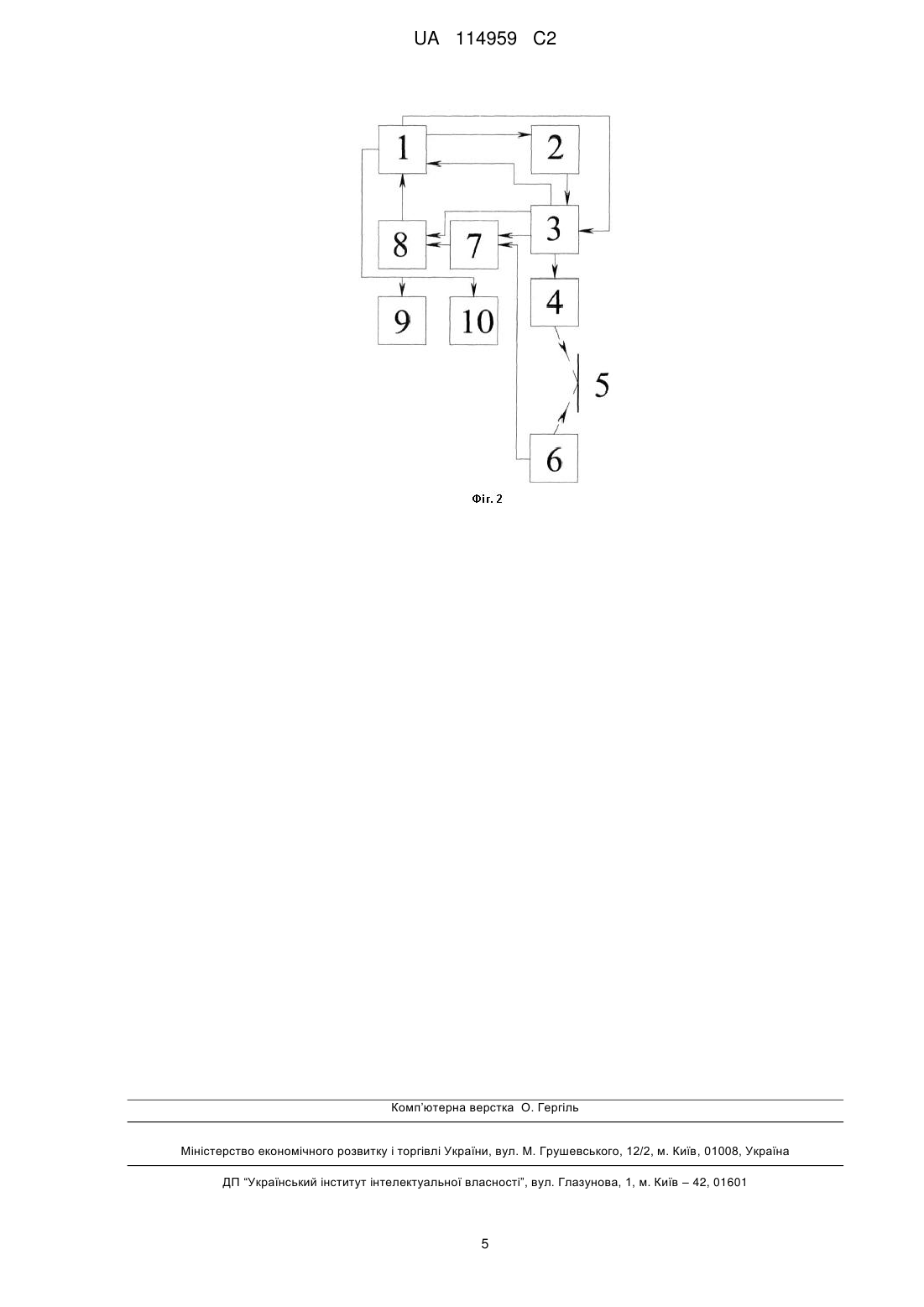
Реферат: Спосіб визначення планових координат верхнього геодезичного знаку вертикальної лінії на надвисоких інженерних спорудах належить галузі інженерної геодезії. Спосіб оснований на методі прямої лінійної засічки світловіддалемірними вимірюваннями, де виконують геодезичну прив'язку центральних точок світловіддалемірів і нижнього геодезичного знаку в інженерній споруді в плані і по висоті з необхідною точністю, світловіддалеміри орієнтують на оптичні відбивачі, які встановлені на верхньому геодезичному знаку інженерної споруди і, змінюючи частоту випромінювача імпульсів, фіксують відстані від світловіддалемірів до відбивачів верхнього геодезичного знаку на будівлі в моменти виникнення в каналах приймачів світловіддалемірів подвійної частоти випромінювання, обчислюючи ці відстані для кожного зі світловіддалемірів за формулою. При цьому, враховуючи данні геодезичної прив'язки світловіддалемірів, по значенням дирекційних кутів напрямків "нижній геодезичний знак - центр світловіддалеміра" як мінімум для двох напрямків, визначають координати верхнього геодезичного знаку х і у в системі координат інженерної споруди. Технічним результатом винаходу є підвищення точності вертикального проектування в надвисоких інженерних спорудах. UA 114959 C2 (12) UA 114959 C2 UA 114959 C2 5 10 15 20 25 30 Запропонований винахід належить до галузі інженерної геодезії. Відомі традиційні способи визначення і передачі планових координат інженерної споруди по вертикалі, такі, наприклад, як побудова вертикалі за допомогою механічного виска [1]. Для геодезичного забезпечення будівництва багатоповерхових споруд цей спосіб неможливо застосовувати внаслідок низької точності (1:1000 за умови сприятливих умов вимірювання) передачі координат по висоті [1]. Більш точним є спосіб оптичного або лазерного вертикального проектування, який забезпечує точність 1-2 мм для висоти споруди близько 100 м [2]. В той же час вимоги по точності розпланувальних робіт для висотних споруд понад 100 м складають середню квадратичну похибку x,y 0,5 мм 1 H 0,5 [3] задані забезпечити необхідну точність, де H 0,01 HIC , при цьому представляють серйозну технічну проблему вертикального проектуванні. Відомо спосіб визначення координат верхнього геодезичного знаку (ВГЗ) за допомогою побудови двох колімаційних площин візирними осями теодолітів (тахеометрів), розміщених на будівельному майданчику [4], в якому перетин колімаційних площин утворює вертикальну лінію, по якій передаються планові координати від нижнього геодезичного знаку (НГЗ) на верхній знак. Недостатньо висока точність пов'язана з недопустимою похибкою (для даного вимірювання 10 кутових секунд) циліндричних рівнів теодолітів, що при висоті споруди 100 м дає похибку вертикалі ~± 20 мм. В якості аналогу, прийнятого за прототип, можна прийняти спосіб [4], загальною ознакою із запропонованим способом є схема розташування приладів. Задачею винаходу є підвищення точності вертикального проектування при будівництві і експлуатації висотних споруд. Поставлена задача вирішується за рахунок створення способу визначення планових координат верхнього геодезичного знаку лінії вертикального проектування на надвисоких інженерних спорудах, оснований на методі прямої лінійної засічки світловіддалемірними вимірюваннями, відрізняється тим, що виконують геодезичну прив'язку центральних точок світловіддалемірів і нижнього геодезичного знаку в інженерній споруді в плані і по висоті з необхідною точністю, світловіддалеміри орієнтують на оптичні відбивачі, які встановлені на верхньому геодезичному знаку інженерної споруди і, змінюючи частоту випромінювача імпульсів, фіксують відстані від світловіддалемірів до відбивачів верхнього геодезичного знаку на будівлі в моменти виникнення в каналах приймачів світловіддалемірів подвійної частоти випромінювання, обчислюючи ці відстані для кожного зі світловіддалемірів за формулою: V n , (1) 4f де V - швидкість розповсюдження світла в атмосфері, f - частота випромінювання світлових імпульсів, n - непарне число періодів подвійної частоти fg 2f випромінювання імпульсів; S 35 40 число n визначають по наближеному значенню відстані S на великомасштабному плані з врахуванням кута нахилу світловіддалемірного променя і заокруглюють до цілого непарного числа: n 45 50 55 4Sf , (2) V при цьому, враховуючи дані геодезичної прив'язки світловіддалемірів, по значенням дирекцій цих кутів напрямків "нижній геодезичний знак - центр далекоміра" як мінімум для двох напрямків, визначають координати верхнього геодезичного знаку х і у в системі координат інженерної споруди. Технічним результатом винаходу є підвищення точності вертикального проектування в надвисоких інженерних спорудах. Запропонований спосіб реалізується наступним чином. На фіг. 1 показана схема розташування геодезичних знаків світловіддалемірів. На схемі (фіг. 1) позначено: 1 - нижній геодезичний знак вертикалі; 2 - верхній геодезичний знак вертикалі; 3 - світловіддалемір; 4 - геодезичний знак; 5 - світловіддалемір; 6 - геодезичний знак. 1 UA 114959 C2 5 10 15 20 25 30 Місця для встановлення світловіддалемірів обирають на деякій відстані від споруди, що контролюється, з врахуванням достатньо гострого кута нахилу світловіддалемірних променів і прямої видимості, облаштовують наземні геодезичні знаки в проекціях центрів світловіддалемірів, стабільні основи для світловіддалемірів і виконують високоточну геодезичну прив'язку в плані і по висоті згаданих геодезичних знаків і нижнього геодезичного знаку контролюючої вертикалі, а також центрів світловіддалемірів і знаків відносно будівельної системи координат. Запропонований спосіб також реалізується за допомогою світловіддалемірного пристрою, блок-схема якого показана на фіг. 2. Блок-схема містить: 1 - блок управління та обробки інформації; 2 - блок генератора високої частоти; 3 - блок модуляції частоти; 4 - блок випромінювання світлових імпульсів; 5 - відбивач; 6 - оптико-електронний приймач; 7 - змішувач частот прямих і відбитих світлових імпульсів; 8 - блок поділу і порівняння змішаної частоти і частоти випромінювання; 9 - блок індикації; 10 - блок запису та зберігання інформації. Всі блоки, крім блока 5, встановлені в корпусі світловіддалемірного каналу. На фіг. 2 електричні зв'язки показано суцільними лініями, а оптичні зв'язки - пунктирними. Розглянемо порядок роботи в двох варіантах: 1. При відсутності розгойдування споруди. 2. При розгойдуванні споруди. 1. Світловіддалемірний пристрій працює наступним чином. Блок 1 вмикає інші блоки пристрою та подає команду на блок 2, який генерує частоту f випромінювання. Блок 2 через блок 3 подає частоту f на блок 4; блок 4 випромінює імпульси світлових сигналів, які надходять до відбивача 5. Відбиті від відбивача світлові імпульси надходять до блока 6, де імпульсні світлові сигнали перетворюються у електричні з основною частотою перебігу f відбитих імпульсів і передаються в блок 7; одночасно в блок 7 надходять електричні сигнали з блока 3 з основною частотою випромінювання f (прямі імпульси). Під час змінювання частоти в блоці 3 змінюється проміжок часу затримки між прямими та відбитими сигналами. В момент, коли цей часовий інтервал буде дорівнювати T , де T - період частоти f , в змішувачі 7 виникає 2 подвійна частота fg 2f , яка з блока 7 надходить в блок 8. В блоці 8 частота fg ділиться на 2. 35 Також в блок 8 з блока 3 надходить поточна частота випромінювання f , яка порівнюється з частотою fg 2 . В момент збігу цих частот сигнал про наявність рівності частот f fg 2 з блока 8 надходять до блока 1. В блок 1 надходять також з блока 2 значення поточної частоти на момент збігу. Число n визначають по наближеному значенню відстані на великомасштабному плані (2). У підсумку визначають відстані від приладу до відбивача для моменту співпадання частот 40 (f fg 2 ) за формулою S V n . (5) 4f Очевидно, що точність вимірювання відстаней досить висока. Дійсно, при диференціюванні (5) отримаємо: dS 45 n fdV Vdf , (6) 4 f2 переходячи до середньої квадратичної похибки 2 2 mS S moV mof , (7) де m oV - середня квадратична похибка визначення швидкості світла в атмосфері; 50 mof - середня квадратична похибка вимірювання частоти. Оскільки при рішенні даної інженерно-геодезичної задачі величина відстані S не перевищує приблизно 1,5 км, то похибка вимірювання відстані S складе 1,5 мм за умови moV 107 і mof 107 , а точність визначення вертикалі не перевищить 1,5-2 мм, при цьому після 2 UA 114959 C2 перетворення виміряних S1 і S 2 в координати XВГЗ і XНГЗ , отримаємо точність не гірше x y 3 мм . 5 10 15 20 Для визначення координат верхнього геодезичного знаку споруди в умовах вітрового розгойдування на верхніх поверхах запропонований спосіб реалізується в межах схем, зображених на фіг. 1 і 2. При цьому в світловіддалемірний пристрій вводиться низькочастотна модуляція основної високої частоти випромінювання світлових імпульсів, яка виконується блоком 3 по команді блока 1 (фіг. 2). Низькочастотна модуляція дозволяє при невеликій амплітуді розгойдування верхнього геодезичного знаку і при розгойдуванні основної частоти f в невеликих межах, залишаючи відоме число n постійним, отримати достатню кількість точок подвійної поточної частоти fg 2f і моментів її появи побудувати графік відхилення верхнього геодезичного знаку від вертикалі по осях X і Y. Візуалізація такого графіку дає можливість виконання контролю вертикалі в динаміці. Робота світловіддалемірного пристрою виконуються в основному по схемі на фіг. 2 і відрізняється від вищеописаного варіанту роботи тим, що включає в блоці 3 модуляцію низької частоти fH і блок 4 випромінює імпульси сигнал блока 3, від якого надходять сигнали в блок 7 (зв'язок "блок 2 - блок 4" і "блок 2 - блок 7" в даному випадку не працює). В іншому всі блоки працюють за схемою на фіг. 2. Відстані Si визначають за формулою (2) при постійному значенні n, змінюючи лише частоту. При відомому значенні числа n (яке можна визначити заздалегідь, наприклад, коли інженерна споруди знаходиться в стані спокою, завчасно розраховують величини відхилень Si для точок траєкторії верхнього геодезичного знаку, в яких виникає подвійна частота fg . Тобто з формули (1) виходить, що Si fi Si , то, визначаючи моменти t i fi i по появі подвійної частоти fg , по даним Si , fi і t i будують графік, який відображає динаміку розгойдування верхнього геодезичного знаку і момент знаходження верхнього геодезичного знаку на вертикалі. При розташуванні світловіддалемірних променів поблизу площин споруди XOZ і YOZ x i і i 25 ВГЗ y jВГЗ 30 будуть відповідно дорівнювати xi K1Si , y j K 2 S j , де K ВГЗ 1 ВГЗ 2 - коефіцієнт, що враховує кут нахилу світловіддалемірного променя. За отриманими даними вимірювань будують графіки коливань верхнього геодезичного знаку відносно вертикалі в напрямках осей X, Y інженерної споруди і використовують ці графіки для контролю вертикальності при будівництві і встановленні технологічного обладнання. Таким чином, запропонований спосіб дозволяє виконувати визначення вертикалі з високою точністю в умовах коливань надвисоких інженерних споруд. Джерела інформації: 1. Войтенко С.П. Інженерна геодезія / Войтенко С.П. - К.: Знання, 2009. - 557 с. 2. Баран П.І. Інженерна геодезія / Баран П.І. - К.: ПАТ "ВІПОЛ", 2012. - 618 с. 3. ДБН В. 1.3-2:2010 "Геодезичні роботи в будівництві". Мінрегіонбуд України, 2010. 35 40 ФОРМУЛА ВИНАХОДУ 45 50 1. Спосіб визначення планових координат верхнього геодезичного знаку вертикальної лінії на надвисоких інженерних спорудах, оснований на методі прямої лінійної засічки світловіддалемірними вимірюваннями, який відрізняється тим, що виконують геодезичну прив'язку центральних точок світловіддалемірів і нижнього геодезичного знаку в інженерній споруді в плані і по висоті з необхідною точністю, світловіддалеміри орієнтують на оптичні відбивачі, які встановлюють на верхньому геодезичному знаку інженерної споруди і, змінюючи частоту випромінювача імпульсів, фіксують відстані від світловіддалемірів до відбивачів верхнього геодезичного знаку на будівлі в моменти виникнення в каналах приймачів світловіддалемірів подвійної частоти випромінювання, обчислюючи ці відстані для кожного зі світловіддалемірів за формулою: V n , 4f де V - швидкість розповсюдження світла в атмосфері, S 3 UA 114959 C2 f - частота випромінювання світлових імпульсів, n - непарне число періодів подвійної частоти fg 2f випромінювання імпульсів, 5 число n визначають по наближеному значенню відстані S на великомасштабному плані з врахуванням кута нахилу світловіддалемірного променя і заокруглюють до цілого непарного числа: n 10 15 4Sf , V при цьому, враховуючи данні геодезичної прив'язки світловіддалемірів, по значенням дирекційних кутів напрямків "нижній геодезичний знак - центр світловіддалеміра" як мінімум для двох напрямків, визначають координати верхнього геодезичного знаку х і у в системі координат інженерної споруди. 2. Спосіб за п. 1, який відрізняється тим, що в умовах коливань інженерної споруди верхнього геодезичного знака відносно вертикалі по напрямкам X, Y системи координат інженерної споруди додатково модулюють сигнали з частотою f більш низької частоти fH і за рахунок цього в межах коливання верхнього геодезичного знаку фіксують у відлікових каналах світловіддалемірів в моменти появи подвійної частоти 2( f FH ) величини відстаней "світловіддалемір - верхній геодезичний знак" і, перетворюючи ці дані в координати XiВЗ , YjВЗ верхнього знаку, враховують координати нижнього знаку XiНЗ , YjНЗ , по різницям Xi XiВЗ XiНЗ і Yj YjВЗ YjНЗ 20 та по моментам t i , t j будують графіки динамічного положення верхньогогеодезичного знаку по напрямкам осей X і Y, які використовують для контролю вертикальності конструкції інженерної споруди. 4 UA 114959 C2 Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 11/36
Мітки: верхнього, геодезичного, інженерних, вертикальної, координат, визначення, надвисоких, спорудах, спосіб, лінії, планових, знаку
Код посилання
<a href="https://ua.patents.su/7-114959-sposib-viznachennya-planovikh-koordinat-verkhnogo-geodezichnogo-znaku-vertikalno-lini-na-nadvisokikh-inzhenernikh-sporudakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення планових координат верхнього геодезичного знаку вертикальної лінії на надвисоких інженерних спорудах</a>
Спосіб визначення планових координат гака візка крана центрального залу атомної електростанції (аес)
Номер патенту: 49198
Опубліковано: 16.09.2002
Автори: Павлюков Сергій Сергійович, Середицька Тетяна Валеріївна, Бурачек Всеволод Германович
МПК: G02B 13/08
Мітки: планових, крана, координат, визначення, спосіб, центрального, атомної, гака, електростанції, аес, візка, залу
Формула / Реферат:
Спосіб визначення планових координат гака візка крана центрального залу атомної електростанції (АЕС), що базується на світловіддалемірних вимірюваннях, який відрізняється тим, що світлові потоки випромінювання двох світловіддалемірів спрямовані по контуру залу до взаємно протилежних кінців крана, де вони змінюють свій напрямок на 90 градусів за допомогою пентагональних відбивачів і направляються назустріч один одному на відбиваючі елементи,...
Спосіб визначення планових координат точок на земній поверхні
Номер патенту: 64097
Опубліковано: 15.03.2005
Автори: Шевченко Тарас Георгійович, Голубінка Юрій Ігорович, Третяк Корнилій Романович, Романишин Ігор Богданович
МПК: G01C 5/00
Мітки: координат, поверхні, планових, спосіб, земній, визначення, точок
Формула / Реферат:
1. Спосіб обеззаражування овочів, фруктів та ягід в якому, почергово, спочатку ведуть промивання овочів, фруктів та ягід у негативно електроактивованій воді (католіті) з окислювально-відновлювальним потенціалом (-480) мВ, потім ведуть замочування овочів. фруктів та ягід у позитивно електроактивованій воді (аноліті) з окислювально-відновлювальним потенціалом (+1140) мВ, який відрізняється тим, що промивання овочів, фруктів та ягід ведуть у...
Система передачі планових координат по вертикалі
Номер патенту: 98376
Опубліковано: 10.05.2012
Автори: Бурачек Всеволод Германович, Сидоренко Віктор Дмитрович, Беленок Вадим Юрійович, Нисторяк Іван Олександрович, Цвілій Ярослав Миколайович
МПК: G01C 15/00
Мітки: планових, передачі, координат, вертикалі, система
Формула / Реферат:
Система передачі планових координат по вертикалі, заснована на схемі "досліду Юнга", яка містить освітлювач, щілинну діафрагму, багатощілинну марку, прилад, що реєструє інтерференційну картину, яка відрізняється тим, що багатощілинна марка розміщена на скляній пластині, що горизонтується, яка встановлена на нижньому кінці схеми на основі з механізмом горизонтування, при цьому марка містить дві взаємно перпендикулярні групи...
Електромагнітна система визначення координат інженерних комунікацій
Номер патенту: 45377
Опубліковано: 15.04.2002
Автори: Яворський Ігор Миколайович, Драбич Петро Петрович, Драбич Олег Петрович
МПК: G01V 3/10, G01R 33/00
Мітки: координат, система, інженерних, комунікацій, визначення, електромагнітна
Формула / Реферат:
Електромагнітна система визначення координат інженерних комунікацій, яка складається з ближнього, середнього і дальнього відносно осі комунікації паралельно розміщених на одній осі ідентичних магнітоприймачів, першого, другого і третього пристроїв віднімання, першого і другого вузькосмугових підсилювачів, навушних телефонів, аналого-цифрового перетворювача і цифрового індикатора, в якій вихід ближнього магнітоприймача з'єднаний з першим...
Спосіб визначення довжин ліній еталонного геодезичного базису
Номер патенту: 83876
Опубліковано: 10.10.2013
Автори: Цюпак Ігор Михайлович, Тревого Ігор Севірович, Шевченко Георгій Тарасович, Шевченко Тарас Георгійович, Ванчура Олена Іванівна
МПК: G01C 3/00
Мітки: ліній, базису, еталонного, спосіб, довжин, геодезичного, визначення
Формула / Реферат:
Спосіб визначення довжин ліній еталонного геодезичного базису, що включає встановлення і примусове центрування приладів для вимірювання віддалей на початковому та решті пунктів базису і визначення віддалей між ними, який відрізняється тим, що як прилади для вимірювання віддалей використовують GPS-приймачі, виконують необхідні сесії вимірювань, визначають координати пунктів базису, а за ними віддалі між пунктами.
Попередній патент: Сполуки, що регулюють ріст рослин
Наступний патент: Спосіб комплексної патоморфологічної діагностики деформацій внутрішніх сонних артерій
Випадковий патент: Спосіб лікування захворювань тазостегнового суглоба