Універсальний вантажопідйомний гідравлічний маніпулятор
Формула / Реферат
Універсальний вантажопідйомний гідравлічний маніпулятор, що містить основу, яка несе на собі вантажопідйомну стрілу, що складається з ведучої і веденої ланок, з'єднаних між собою шарніром, та які приводяться в дію силовими гідроциліндрами, і гідросистему для управління гідроциліндрами, причому основа виконана у вигляді плоскої вертикальної трикутної рами, а також знизу вертикальна рама забезпечена додатковою горизонтальною плоскою рамою, оснащеною на кінці стандартним зчепленням і підп'ятником, та під якою розташований опорний вузол маніпулятора, при цьому ведучу ланку вантажозахватної стріли виконано у вигляді вертикальної балки, зчленованої з плоскою вертикальною трикутною рамою з можливістю повороту відносно шарнірів, виконаних у вигляді подвійних та одинарного вушок, що членуються між собою за допомогою пальців, причому під вушком вертикальної ведучої ланки розташований радіально-упорний підшипник, а ведена ланка виконана у вигляді телескопічної балки коробчастого перерізу і пов'язана з одного кінця з верхнім кінцем ведучої ланки за допомогою шарніра, а також в останньому коробчастому елементі телескопічної балки веденої ланки встановлена рухомо з можливістю фіксації пальцем додаткова ланка для зміни довжини веденої ланки для забезпечення додаткового збільшення довжини веденої ланки, до якої приєднаний будь-який вантажозахватний орган, наприклад, крюк, при цьому вільний кінець корпусу вказаного гідроциліндра охоплений запобіжною скобою, що фіксує положення корпусу гідроциліндра відносно першого коробчастого елемента телескопічної балки веденої ланки, крім того шарнір у вигляді пальця, що сполучає ланки гідравлічного маніпулятора, встановлений на верхньому кінці ведучої ланки, а поворот у вертикальній плоскості ведучої ланки забезпечується двома силовими циліндрами, вільні кінці корпусів яких жорстко зв'язані між собою планкою, до того ж пульт управління гідросистемою змонтований на патрубку біля плоскої вертикальної трикутної рами, який відрізняється тим, що опорний вузол виконаний у вигляді двох вертикальних гідравлічних опор, розташованих по обидві боки від ведучої ланки і приєднаних до основи гідравлічного маніпулятора, та виконаних у вигляді башмаків, що приводяться в дію вертикальними гідроциліндрами, які у горизонтальному напряму пересуваються за допомогою гідроциліндра, встановленого у горизонтальну порожнисту балку, яка є нижнім елементом плоскої вертикальної трикутної рами, крім того висота ведучої ланки перевищує висоту плоскої вертикальної трикутної рами.
Текст
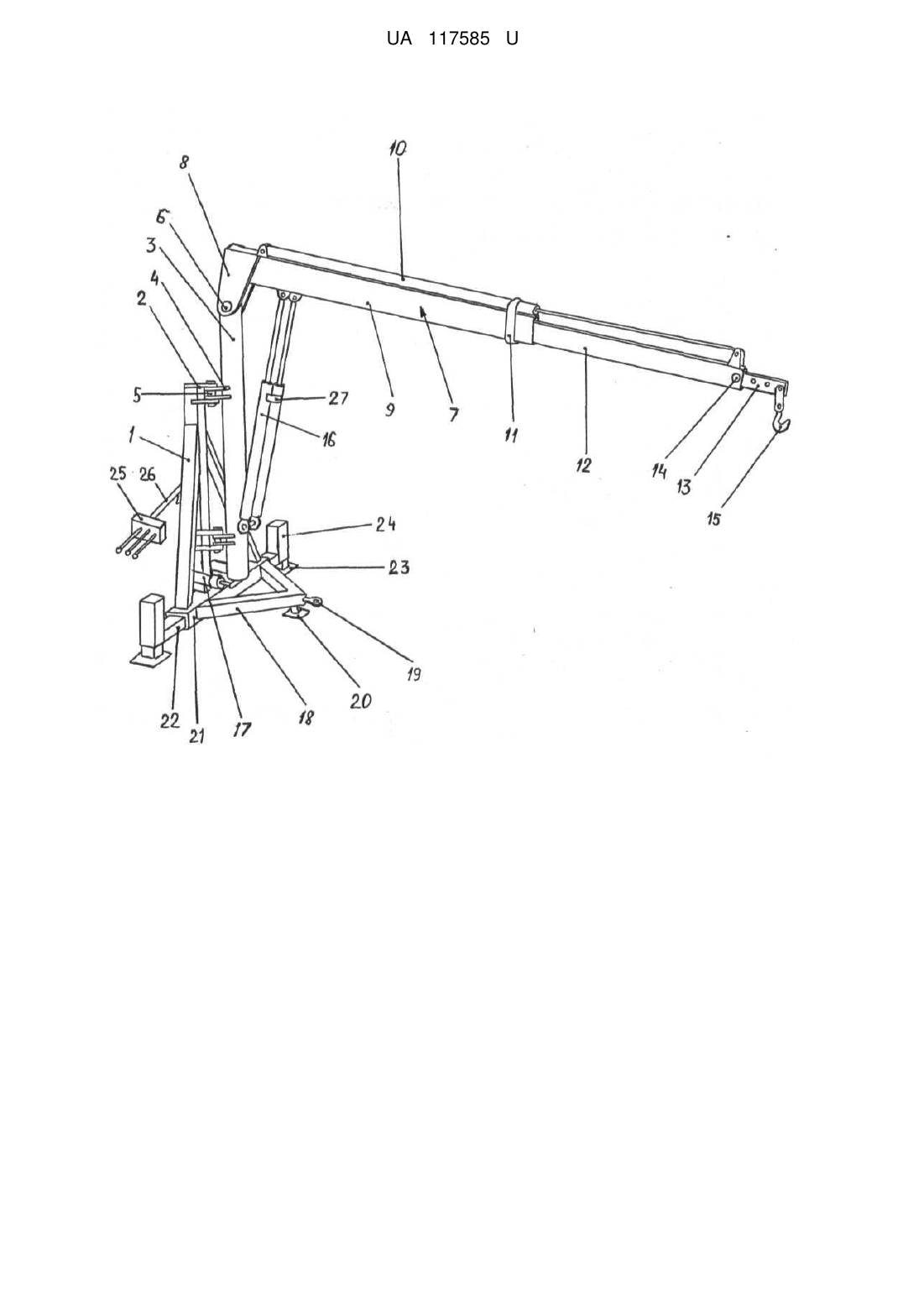
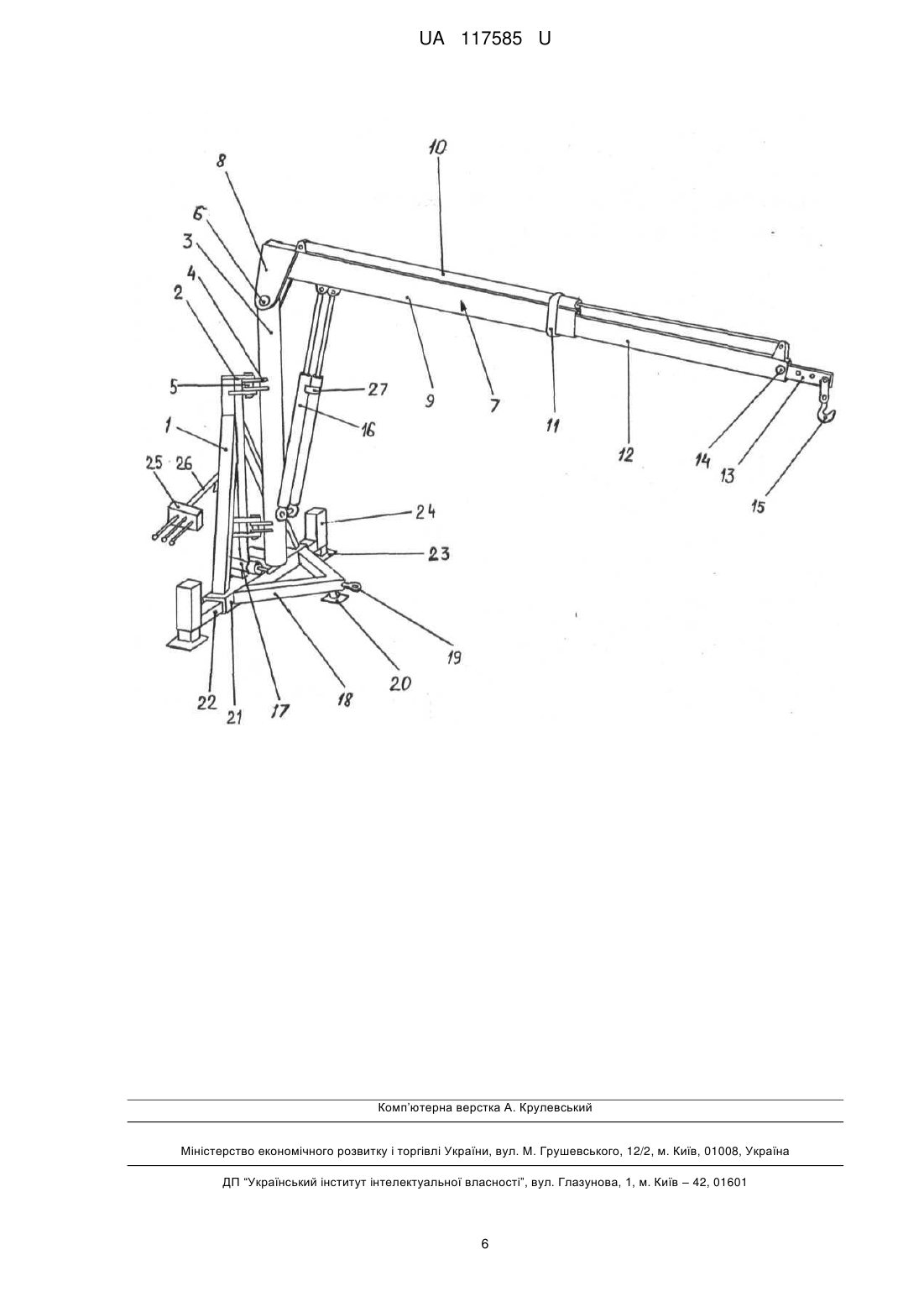
Реферат: Універсальний вантажопідйомний гідравлічний маніпулятор містить основу, яка несе на собі вантажопідйомну стрілу, що складається з ведучої і веденої ланок, з'єднаних між собою шарніром, та які приводяться в дію силовими гідроциліндрами, і гідросистему для управління гідроциліндрами, причому основа виконана у вигляді плоскої вертикальної трикутної рами, а також знизу вертикальна рама забезпечена додатковою горизонтальною плоскою рамою, оснащеною на кінці стандартним зчепленням і підп'ятником, та під якою розташований опорний вузол маніпулятора, при цьому ведучу ланку вантажозахватної стріли виконано у вигляді вертикальної балки. При цьому опорний вузол виконаний у вигляді двох вертикальних гідравлічних опор, розташованих по обидві боки від ведучої ланки і приєднаних до основи гідравлічного маніпулятора, та виконаних у вигляді башмаків, що приводяться в дію вертикальними гідроциліндрами, які у горизонтальному напряму пересуваються за допомогою гідроциліндра, встановленого у горизонтальну порожнисту балку, яка є нижнім елементом плоскої вертикальної трикутної рами, крім того висота ведучої ланки перевищує висоту плоскої вертикальної трикутної рами. UA 117585 U (12) UA 117585 U UA 117585 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі підйомно-транспортного устаткування, зокрема до вантажопідйомних пристроїв з гідравлічним приводом, і може бути використана як автономний навантажувач або як навісний робочий орган для тракторних навантажувачів або для інших сільськогосподарських машин і вантажівок. Відомий навантажувач, що містить основу, яка несе на собі вантажопідйомну стрілу, що складається з відомої і ведучої ланки, яка приводиться в дію силовими гідроциліндрами, і гідросистему для управління циліндрами, причому основа виконана у вигляді плоскої трикутної рами із знімними балками, які несуть опорні башмаки, а на кутах рами встановлені шарнірні вузли, один з яких сполучений з вантажопідйомною стрілою, а два інших - з силовими гідроциліндрами, причому протилежні кінці циліндрів сполучені між собою та з стрілою [див. а.с. СРСР № 555046 з класу B66F 9/12 опубліковане 25.04.1977 року в Бюл. № 15]. Основним суттєвим недоліком відомого навантажувача є недосконалість конструкції його вантажопідйомної стріли. Наявність цього недоліку обумовлена наступним. Вантажопідйомна стріла відомого навантажувача складається з двох основних елементів: ведучої ланки-стріли і стріли-рукояті, прикріпленої шарнірно до консольного кінця ведучої ланки-стріли. В центрі ведучої ланки-стріли розташований шарнір, в який упираються три силові гідроциліндри. Отже, цей шарнір відчуває досить велике навантаження і для забезпечення його високої надійності роботи, він, природно, має бути достатньо масивним, що вабить збільшення габаритів вантажозахватної стріли в цілому зі всіма негативними наслідками (наприклад збільшення ваги). Крім цього отвори, в які встановлений згаданий шарнір, є концентратором напруги, що підвищує вірогідність руйнування ведучої ланки-стріли в центрі. Теж саме можна сказати і про шарнір, що сполучає ведучу ланку-стрілу із стрілою-рукояттю: він теж має бути масивним для забезпечення надійності кріплення, оскільки "працює" на відрив під впливом силового гідроциліндра, що забезпечує поворот стріли-рукояті у вертикальній площині. Цей недолік усунений у гідравлічній стрілі, що містить основу та безпосередньо вантажопідйомну стрілу, яка складається з ведучої і веденої ланок, що приводяться в дію силовими гідроциліндрами, і гідросистему для управління гідроциліндрами, причому основа виконана у вигляді плоскої вертикальної трикутної рами з горизонтальними балками коаксіальної конструкції з висувними елементами, що несуть опорні башмаки, при цьому ведучу ланку вантажопідйомної стріли виконано у вигляді вертикальної балки, шарнірно прикріпленої до плоскої вертикальної трикутної рами з можливістю повороту відносно вказаних шарнірів, а ведена ланка виконана у вигляді телескопічної балки коробчастого перерізу і зв'язана з одного кінця з верхнім кінцем ведучої ланки за допомогою шарніра [див. пат. України № 45754 з класу B66F 9/12 опублікований 25.11.2009 року в Бюл. № 22]. Основним суттєвим недоліком цієї гідравлічної стріли є невиправдана обмеженість її вантажопідйомності внаслідок розташування осі вертикального повороту стріли на лінії розташування опорних башмаків. Таке розташування опорних башмаків забезпечує достатню стійкість вантажопідйомної стріли лише при боковому її розташуванні відносно лінії опорних башмаків (при повороті), проте при перпендикулярному її розташуванні (уздовж лінії трактора) таке розташування опорних башмаків не усуває перекидаючий момент. Крім цього відома гідравлічна стріла має конструктивну обмеженість виходу з балок опорних башмаків, що обмежує її стійкість, обмеженість радіусу обслуговування через незмінну довжину веденої ланки, надмірна завантаженість гідроциліндрів через їхню нестачу, а отже, й неможливості перерозподілу навантаження на кожний з них, неможливість зберігання стріли у вертикальному стані через відсутність опорного майданчика та інші конструктивні недоліки, наприклад, відсутня зчіпка, додаткові засоби безпеки тощо, що дає підставу для висновку про конструктивну невдосконаленість відомої гідравлічної стріли. Найбільш близькою за своєю суттю та ефекту, що досягається, і яка приймається за прототип, є універсальна автономна поворотна гідравлічна стріла, що містить основу, яка несе на собі вантажопідйомну стрілу, що складається з ведучої і веденої ланок, з'єднаних між собою шарніром, та які приводяться в дію силовими гідроциліндрами, і гідросистему для управління гідроциліндрами, причому основа виконана у вигляді плоскої вертикальної трикутної рами висотою, що дорівнюється довжині ведучої ланки стріли, а також знизу вертикальна рама забезпечена додатковою горизонтальною плоскою рамою, оснащеною на кінці стандартним зчепленням і підп'ятником, та під якою розташований опорний вузол стріли, виконаний у вигляді горизонтальної балки коаксіальної конструкції, ширина отвору в якій достатня для розміщення в ній паралельно двох висувних елементів, відокремлених один від одного вертикальною перегородкою, закріпленої всередині коаксіальної балки за всією її довжиною, та призначених для утримування опорних башмаків, розташованих у вертикальних трубчастих (або суцільних) елементах яких виконаний набір послідовних отворів для фіксуючого пальця виконаних в 1 UA 117585 U 5 10 15 20 25 30 35 40 45 50 55 60 шаховому порядку для регулювання висоти розташування опорних башмаків, при цьому ведучу ланку вантажозахватної стріли виконано у вигляді вертикальної балки, зчленованої з плоскою вертикальною трикутною рамою з можливістю повороту відносно шарнірів, виконаних у вигляді подвійних та одинарного вушок, що членуються між собою за допомогою пальців, причому під вушком вертикальної ведучої ланки розташований радіально-упорний підшипник, а ведена ланка виконана у вигляді телескопічної балки коробчастого перерізу і пов'язана з одного кінця з верхнім кінцем ведучої ланки за допомогою шарніра, а також в останньому коробчастому елементі телескопічної балки веденої ланки встановлена рухомо з можливістю фіксації пальцем додаткова ланка для зміни довжини веденої ланки для забезпечення додаткового збільшення довжини веденої ланки, до якої приєднаний будь-який вантажозахватний орган, наприклад, крюк, при цьому вільний кінець корпусу вказаного гідроциліндра охоплений запобіжною скобою, що фіксує положення корпусу гідроциліндра відносно першого коробчастого елемента телескопічної балки веденої ланки, крім того шарнір у вигляді пальця, що сполучає ланки гідравлічної стріли встановлений на верхньому кінці ведучої ланки, а поворот у вертикальній плоскості ведучої ланки забезпечується двома силовими циліндрами, вільні кінці корпусів яких жорстко зв'язані між собою планкою, до того ж пульт управління гідросистемою змонтований на поворотному Г-подібному патрубку, що фіксується в заданому положенні, із заднього боку плоскої вертикальної трикутної рами [див. пат. України № 60114 з класу B66F 19/00 опублікований 10.06.2011 року в Бюл. № 11]. Основним суттєвим недоліком відомої універсальної автономної вантажопідйомної поворотної гідравлічної стріли є невдосконаленість конструкції опорного вузла, яка обґрунтовується наступним. По-перше, висування-всування висувних елементів з коаксіальної балці відбувається вручну, що досить трудомістко, оскільки при пересуванні цих елементів по внутрішній поверхні коаксіальної балці виникає значне тертя ковзання, яке кожного разу збільшується через природне забруднення пересувних елементів. При значних розмірах висувних елементів (у разі великої вантажопідйомності стріли потрібні масивні опорні елементи), їх пересування ручним способом стає проблематичним, навіть, для сильного чоловіка. По-друге, висота опорних елементів змінюється дискретно ті, знов же ж, ручним способом. Дискретність не дозволяє, у разі потреби, наприклад похила опорна поверхня, вирівняти стрілу по вертикалі, оскільки для цього потрібно підняти висувний елемент, а це можна зробити лише піднявши разом з ним саму гідрострілу та трактор, що, зрозуміло, одному чоловіку зробити неможливо. По-третє, опорний вузол стріли є малонадійним - достатньо зігнути хоча б один з висувних елементів у будь-якому напряму, і його вже неможливо вставити у коаксіальну балку, а випадків для непередбаченого випадкового згинання висувного елемента на практиці достатньо, наприклад, перевантаження стріли, ударне навантаження тощо. Другим суттєвим недоліком відомого технічного рішення є те, що висота ведучої ланки пов'язано з висотою трикутної рами. Суть цього недоліку пояснюється наступним. Висота підйому вантажу здебільше залежить від висоти ведучої ланки, а отже її треба зробити якнайвищою. Але висота підйому зовсім не залежить від висоти трикутної рами, яка виконує функцію лише жорсткого вертикального елемента, до якого кріпляться елементи гідравлічної стріли. Якщо це так, то у збільшенні висоти трикутної рами до висоти "високої" ведучої ланки немає сенсу - це ніяким чином не впливає на роботу стріли, проте невиправдане збільшує загальну вагу гідравлічної стріли - маніпулятора. В основу корисної моделі поставлена задача подальшого удосконалення конструкції універсального вантажопідйомного гідравлічного маніпулятора за рахунок заміни конструкції механічного опорного вузла на автоматичний, шляхом використання гідравлічних опор та зміни висоти ведучої ланки. Рішення поставленої задачі досягається тим, що універсальний вантажопідйомний гідравлічний маніпулятор, що містить основу, яка несе на собі вантажопідйомну стрілу, що складається з ведучої і веденої ланок, з'єднаних між собою шарніром, та які приводяться в дію силовими гідроциліндрами, і гідросистему для управління гідроциліндрами, причому основа виконана у вигляді плоскої вертикальної трикутної рами, а також знизу вертикальна рама забезпечена додатковою горизонтальною плоскою рамою, оснащеною на кінці стандартним зчепленням і підп'ятником, та під якою розташований опорний вузол маніпулятора, при цьому ведучу ланку вантажозахватної стріли виконано у вигляді вертикальної балки, зчленованої з плоскою вертикальною трикутною рамою з можливістю повороту відносно шарнірів, виконаних у вигляді подвійних та одинарного вушок, що членуються між собою за допомогою пальців, причому під вушком вертикальної ведучої ланки розташований радіально-упорний підшипник, а ведена ланка виконана у вигляді телескопічної балки коробчастого перерізу і пов'язана з одного кінця з верхнім кінцем ведучої ланки за допомогою шарніра, а також в останньому коробчастому 2 UA 117585 U 5 10 15 20 25 30 35 40 45 50 55 елементі телескопічної балки веденої ланки встановлена рухомо з можливістю фіксації пальцем додаткова ланка для зміни довжини веденої ланки для забезпечення додаткового збільшення довжини веденої ланки, до якої приєднаний будь-який вантажозахватний орган, наприклад крюк, при цьому вільний кінець корпусу вказаного гідроциліндра охоплений запобіжною скобою, що фіксує положення корпусу гідроциліндра відносно першого коробчастого елемента телескопічної балки веденої ланки, крім того шарнір у вигляді пальця, що сполучає ланки гідравлічного маніпулятора, встановлений на верхньому кінці ведучої ланки, а поворот у вертикальній плоскості ведучої ланки забезпечується двома силовими циліндрами, вільні кінці корпусів яких жорстко зв'язані між собою планкою, до того ж пульт управління гідросистемою змонтований на патрубку біля плоскої вертикальної трикутної рами, згідно з корисною моделлю, опорний вузол виконаний у вигляді двох вертикальних гідравлічних опор, розташованих по обидва боки від ведучої ланки і приєднаних до основи гідравлічного маніпулятора, та виконаних у вигляді башмаків, що приводяться в дію вертикальними гідроциліндрами, які у горизонтальному напряму пересуваються за допомогою гідроциліндра, встановленого у горизонтальну порожнисту балку, яка є нижнім елементом плоскої вертикальної трикутної рами, крім того висота ведучої ланки перевищує висоту плоскої вертикальної трикутної рами. Використання опорного вузла у вигляді гідравлічних опор повністю виключає ручний труд для їх переведення у робочий чи у транспортний стан, дозволяє управляти їх просторовим положенням синхронно разом чи окремо кожною опорою та саме так вирівнювати гідравлічний маніпулятор по вертикалі, плавно (не дискретно) регулювати висоту опорних башмаків. Виконання ведучої ланки висотою, що перевищує висоту плоскої вертикальної трикутної рами, дозволяє збільшити висоту підйому вантажу гідравлічним маніпулятором. Таким чином, сукупність суттєвих ознак запропонованого технічного рішення, які отримані за рахунок знесення відповідних конструктивних змін у опорний вузол та ведучу ланку, додали пропонованому гідравлічному маніпулятору принципово нових якостей (безпечності обслуговування та експлуатації та збільшення висоту підіймання вантажу), а отже забезпечує досягнення технічного результату, сформульованого в постановці вирішуваного завдання. Подальша суть запропонованого технічного рішення пояснюється спільно з ілюстративним матеріалом, на якому зображений вигляд в плані запропонованого універсального гідравлічного маніпулятора у робочому стані гідравлічних опор. Запропонований універсальний вантажопідйомний гідравлічний маніпулятор містить основу, виконану у вигляді плоскої вертикальної трикутної рами 1, у верхній і нижній частині якої закріплені співвісні подвійні вушка 2, до яких прикріпляється з можливістю повороту ведуча ланка 3 маніпулятора, яка виконана у вигляді вертикальної поворотної балки. Ведуча ланка 3 маніпулятора забезпечена відповідними одинарними вушками 4. Зчленування подвійних вушок 2 і одинарного 4 здійснюється за допомогою з'єднувального пальця 5, який утворює осьовий шарнір між плоскою вертикальною трикутною рамою 1 і ведучою ланкою 3 для забезпечення можливості повороту останньої відносно плоскої вертикальної трикутної рами 1. Верхній кінець ведучої ланки 3, за допомогою пальця 6 пов'язаний з веденою ланкою 7 гідростріли через щоки 8, які прикріплені нероз'ємно до веденої ланки 7. Ведена ланка 7 виконано у вигляді телескопічної балки коробчастого перерізу, що складається з першого нерухомого елемента 9, до якого прикріплені щоки 8 і на якому встановлений силовий гідроциліндр 10, кінець корпусу якого охоплений запобіжною скобою 11, і другого рухомого елемента 12, з яким пов'язаний шток гідроциліндра 10, на зовнішньому консольному кінці якого встановлена додаткова висувна ланка 13, положення якої фіксується за допомогою пальця 14, і на кінці якої встановлений змінний робочий орган, наприклад, гак 15 (грейфер, щелепний захват, електромагніт, ківш екскаватора тощо). Підйом і опускання веденої ланки 7 здійснюється за допомогою двох силових гідроциліндрів 16, корпуси яких шарнірно пов'язані з ведучою ланкою 3, а штоки - шарнірно пов'язані з першим елементом 9 веденої ланки 7. При роботі силових гідроциліндрів 16 ведена ланка 7 може повертатися у вертикальній площині відносно шарніра 6. Для зміни довжини веденої ланки 7 використовується силовий гідроциліндр 10. При роботі силового гідроциліндра 10 ведена ланка 7 змінює свою довжину за рахунок висунення-втягування другого рухомого елемента 12 всередину першого нерухомого елемента 9. Якщо необхідно ще збільшити довжину веденої ланки 7, з другого рухомого елемента 12 висовують на необхідну довжину додаткову висувну ланку 13 і вибране положення фіксують пальцем 14. Для повороту ведучої ланки 3 вправо-вліво використовую силові гідроциліндри 17, корпуси яких шарнірно прикріплені до плоскої вертикальної трикутної рами 1, а штоки - до веденої ланки 7. Всі силові гідроциліндри 10, 16 і 17 пов'язані з гідросистемою трактора (з причини загальновідомості, не показана). Силові 3 UA 117585 U 5 10 15 20 25 30 35 40 45 50 55 гідроциліндри 10, 16 і 17, в сукупності, забезпечують зміну просторового положення веденої ланки 7 в трьох напрямах. До нижньої частини плоскої вертикальної трикутної рами 1 прикріплена горизонтальна плоска рама 18, на конці якої закріплено зчеплення 19, під яким встановлений підп'ятник 20. Під плоскою горизонтальною рамою 18 розташована горизонтальна поперечна балка 21 коробчастої конструкції, на консольних кінцях внутрішніх рухомих елементах 22 яких, встановлені вертикальні гідравлічні опори, виконані у вигляді башмаків 23, що приводяться в дію вертикальними гідроциліндрами 24, які у горизонтальному напряму пересуваються за допомогою гідроциліндра, встановленого у горизонтальну порожнисту балку 21, яка є нижнім елементом плоскої вертикальної трикутної рами 1. Висота ведучої ланки 3 перевищує висоту плоскої вертикальної трикутної рами 1. Пульт управління 25 роботою гідравлічного маніпулятора встановлений на патрубку 26, прикріпленому до задньої частини плоскої вертикальної трикутної рами 1. Гідравлічний маніпулятор кріпиться до трактора за допомогою набору петель (не показані), що дозволяють враховувати тип навіски трактора. Корпуси двох силових гідроциліндрів 16 жорстко зв'язані між собою перемичкою 27 і рознесені на відстань, не меншу за товщину веденої ланки 7 універсального гідравлічного маніпулятора. Запропонований універсальний вантажопідйомний гідравлічний маніпулятор використовують в такий спосіб. Трактор під'їжджає до місця стаціонарного зберігання універсального вантажопідйомного гідравлічного маніпулятора у вертикальному положенні. Гідравлічний маніпулятор прикріплюють до навіски трактора за допомогою набору пальців. За допомогою гідросистеми трактора, його навіску піднімають догори і трактор разом з гідравлічним маніпулятором переміщується до місця виконання навантажувально-розвантажувальних робіт. По прибутті трактора на місце вантажно-розвантажувальних робіт, гідравлічні опори опускають вниз та спирають у ґрунт. У разі потреби, положення кожного башмака 23 регулюють окремо для вирівнювання гідравлічного маніпулятора по вертикалі. Трактор в даному випадку виконує функцію противаги і джерела енергії для силових гідроциліндрів 10, 16, 17 і 24. Гідравлічний маніпулятор до експлуатації підготовлений. При цьому башмаки 23 разом з трактором утворюють ідеальну опорну поверхню незалежно від рельєфу ґрунту та запобігають виникненню перекидаючого моменту з будь-якого боку. Запропонований універсальний вантажопідйомний гідравлічний маніпулятор може бути закріплений як в кузові вантажного автомобіля, так і стаціонарно, зокрема на стіні приміщення, наприклад, в майстерні, і використовуватися як звичайний консольно-поворотний кран. Таким чином, пропонований гідравлічний маніпулятор, за суттю, є автономним універсальним навантажувально-розвантажувальним засобом. Опорний вузол може бути розташований безпосередньо на тракторі, або для навішування гідравлічного маніпулятора використовується трактор з наявними гідравлічними опорами. Запропоноване технічне рішення перевірене на практиці, складається із звичайних і відомих вузлів, не містить ніяких елементів, деталей або вузлів, які неможливо було б відтворити на сучасному етапі розвитку науки і техніки, зокрема, в машинобудуванні, отже, промислово придатне, має певні переваги перед відомими навантажувально-розвантажувальними засобами аналогічного призначення завдяки запропонованим конструктивним змінам, що підтверджує можливість досягнення технічного результату об'єктом, що заявляється. У відомих джерелах інформації не виявлені подібні універсальні гідравлічні маніпулятори з вказаними в пропозиції суттєвими ознаками, а тому, вважається таким, що може отримати правовий захист. До технічних переваг запропонованого технічного рішення, порівняно з прототипом, можна віднести наступне: підвищення безпеки та продуктивності підготовки гідравлічного маніпулятора до експлуатації за рахунок використання гідравлічних опор; підвищення надійності та працездатності опорного вузла з тієї ж причини; можливість вирівнювання по вертикалі гідравлічного маніпулятора за рахунок незалежної роботи кожної гідравлічної опори; можливість збільшення висоти підйому вантажів за рахунок збільшення висоти ведучої ланки що розширює область застосування гідравлічного маніпулятора. Соціальний ефект від впровадження запропонованого технічного рішення, в порівнянні з використанням прототипу, отримують за рахунок безпечності праці та зниження трудомісткості під час підготовки до експлуатації гідравлічного маніпулятора. 4 UA 117585 U Економічний ефект від впровадження запропонованого технічного рішення, в порівнянні з використанням прототипу, отримують за рахунок скорочення строку підготовки гідравлічного маніпулятора до виконання навантажувально-розвантажувальних робіт. 5 10 15 20 25 30 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Універсальний вантажопідйомний гідравлічний маніпулятор, що містить основу, яка несе на собі вантажопідйомну стрілу, що складається з ведучої і веденої ланок, з'єднаних між собою шарніром, та які приводяться в дію силовими гідроциліндрами, і гідросистему для управління гідроциліндрами, причому основа виконана у вигляді плоскої вертикальної трикутної рами, а також знизу вертикальна рама забезпечена додатковою горизонтальною плоскою рамою, оснащеною на кінці стандартним зчепленням і підп'ятником, та під якою розташований опорний вузол маніпулятора, при цьому ведучу ланку вантажозахватної стріли виконано у вигляді вертикальної балки, зчленованої з плоскою вертикальноютрикутною рамою з можливістю повороту відносно шарнірів, виконаних у вигляді подвійних та одинарного вушок, що членуються між собою за допомогою пальців, причому під вушком вертикальної ведучої ланки розташований радіально-упорний підшипник, а ведена ланка виконана у вигляді телескопічної балки коробчастого перерізу і пов'язана з одного кінця з верхнім кінцем ведучої ланки за допомогою шарніра, а також в останньому коробчастому елементі телескопічної балки веденої ланки встановлена рухомо з можливістю фіксації пальцем додаткова ланка для зміни довжини веденої ланки для забезпечення додаткового збільшення довжини веденої ланки, до якої приєднаний будь-який вантажозахватний орган, наприклад, крюк, при цьому вільний кінець корпусу вказаного гідроциліндра охоплений запобіжною скобою, що фіксує положення корпусу гідроциліндра відносно першого коробчастого елемента телескопічної балки веденої ланки, крім того шарнір у вигляді пальця, що сполучає ланки гідравлічного маніпулятора, встановлений на верхньому кінці ведучої ланки, а поворот у вертикальній плоскості ведучої ланки забезпечується двома силовими циліндрами, вільні кінці корпусів яких жорстко зв'язані між собою планкою, до того ж пульт управління гідросистемою змонтований на патрубку біля плоскої вертикальної трикутної рами, який відрізняється тим, що опорний вузол виконаний у вигляді двох вертикальних гідравлічних опор, розташованих по обидві боки від ведучої ланки і приєднаних до основи гідравлічного маніпулятора, та виконаних у вигляді башмаків, що приводяться в дію вертикальними гідроциліндрами, які у горизонтальному напряму пересуваються за допомогою гідроциліндра, встановленого у горизонтальну порожнисту балку, яка є нижнім елементом плоскої вертикальної трикутної рами, крім того висота ведучої ланки перевищує висоту плоскої вертикальної трикутної рами. 5 UA 117585 U Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B66F 9/12, B60P 1/00, B66C 23/00
Мітки: універсальний, маніпулятор, гідравлічний, вантажопідйомний
Код посилання
<a href="https://ua.patents.su/8-117585-universalnijj-vantazhopidjjomnijj-gidravlichnijj-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Універсальний вантажопідйомний гідравлічний маніпулятор</a>
Гідравлічний маніпулятор
Номер патенту: 107640
Опубліковано: 10.06.2016
Автор: Ляшенко Дмитро Євгенійович
МПК: B25J 9/20, B66C 23/06, B66F 9/04, B66F 19/00, B66C 13/42
Мітки: маніпулятор, гідравлічний
Формула / Реферат:
Гідравлічний маніпулятор, що містить основу, яка несе на собі вантажозахватну стрілу, що складається з ведучої і веденої ланок, які приводяться в дію силовими гідроциліндрами, і гідросистему для керування гідроциліндрами, причому основа виконана у вигляді плоскої вертикальної трикутної рами з горизонтальними балками коаксіальної конструкції з висувними елементами, що несуть опорні башмаки, причому ведучу ланку вантажозахватної стріли...
Гідравлічний кран-маніпулятор
Номер патенту: 3977
Опубліковано: 15.12.2004
Автори: Яковлєв Сергій Олександрович, Бондаренко Борис Маврович, Радкевич Анатолій Валентинович
МПК: B66C 23/04, B66C 23/08
Мітки: кран-маніпулятор, гідравлічний
Формула / Реферат:
Гідравлічний кран-маніпулятор, що містить поворотну стійку з встановленою на ній телескопічною стрілою, вантажозахватним органом, слідкуючою системою, гідравлічним приводом та електронною системою управління, який відрізняється тим, що він установлений на самохідному шасі, оголовок його стріли виконаний у вигляді кутової секції зі з'єднуючою обоймою, фіксуючою віссю, гідроциліндром нахилу кутової секції, крім цього, кран має блок...
Універсальний маніпулятор з можливістю низькочастотної вібраційної обробки зварювальної ванни
Номер патенту: 80823
Опубліковано: 10.06.2013
Автори: Максимов Сергій Юрійович, Лебедєв Володимир Олександрович, Лендєл Іван Володимирович, Пічак Володимир Григорович
МПК: B23K 13/00
Мітки: низькочастотної, обробки, зварювальної, ванни, маніпулятор, вібраційної, можливістю, універсальний
Формула / Реферат:
Універсальний маніпулятор з можливістю низькочастотної вібраційної обробки зварювальної ванни, який складається зі станини, поворотного столу, планшайби, механізму нахилу та механізму обертання планшайби, який відрізняється тим, що механізм нахилу та механізму обертання планшайби обладнаний вентильними електроприводами та блоком керування.
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Вігдергауз Леонід Павлович, Москаленко Олександр Володимирович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Універсальний гідравлічний сифон

Номер патенту: 115332
Опубліковано: 10.04.2017
Автори: Ободовський Олександр Григорович, Онищук Василь Варфоломійович
МПК: E03B 7/07, E02B 15/00
Мітки: універсальний, гідравлічний, сифон
Формула / Реферат:
Універсальний гідравлічний сифон, що складається з труби, яка має чотиристінну обкладинку з трьома просторами між стінками шириною в кожному по 6 мм, останні з'єднані між собою за допомогою системи жорстких дірчатих перегородок, а самі простори по боках заповнені газом гелієм при тиску 0,18 Па або не більше указаної величини, а середній простір є нейтральним при вакуумі, рівному 0,18 Па або не більше указаної величини.
Попередній патент: Пристрій подачі дуття і відновлювальних газів в доменну піч
Наступний патент: Універсальна тракторна гідравлічна стріла
Випадковий патент: Процес створення документа на паперовому носії