Крокопед

Формула / Реферат
(57) 1. Шагопед, содержащий стойки, шарнирно соединенные с планками и с опорной платформой для обуви, привязные и опорные ремни, устройство регулирования подвижности конечности, отличающийся тем, что в него введены опорный каркас с планками, кинематический механизм с валами и шарнирами, при этом устройство регулирования подвижности конечности выполнено в виде храпового механизма с подвижным и неподвижным зубчатыми колесами и кинематически связанных между собой многогранной втулкой, цилиндрической пружины, при этом кинематический механизм выполнен в виде зубчатых колес и реек, связанных через валы, с опорными стойками для рук, шарнирное соединение для тазобедренного сустава выполнено с удлиненным осевым валом, цилиндрической пружиной и стопорной шайбой, а пружина связана с одним из валов кинематического механизма.
2. Шагопед по п.1, отличающийся тем, что валы кинематического механизма имеют шарнирное соединение с планками опорного каркаса.
Текст
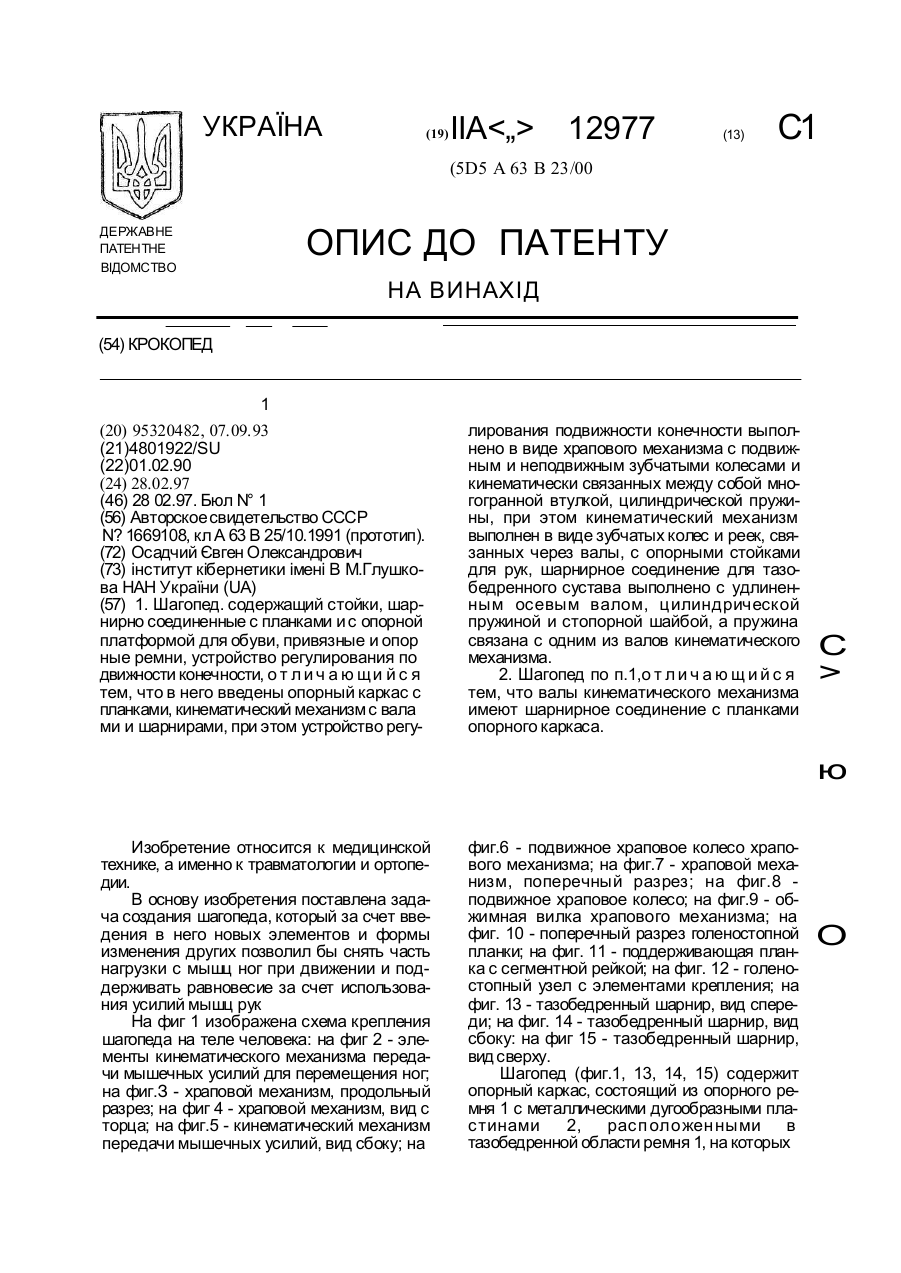
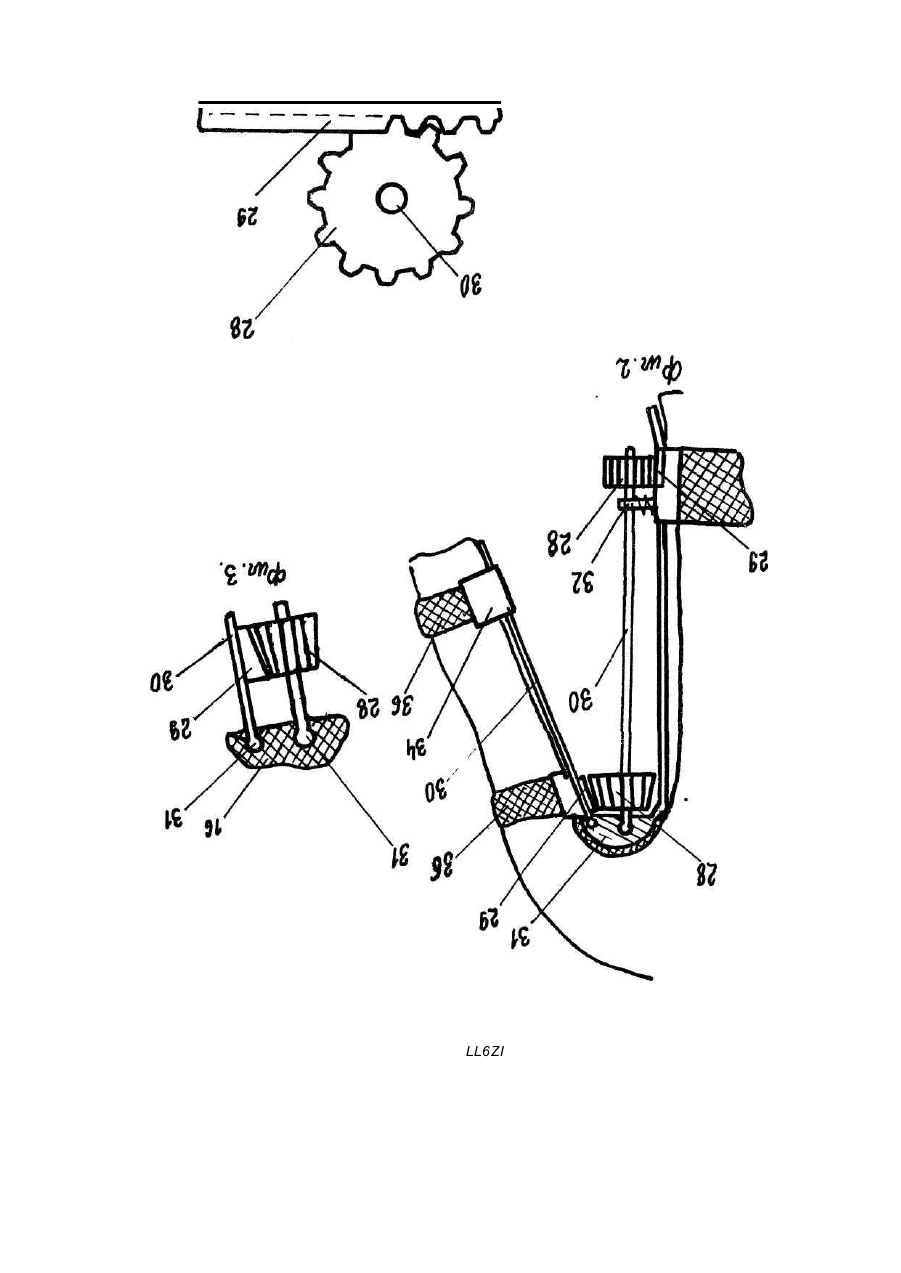
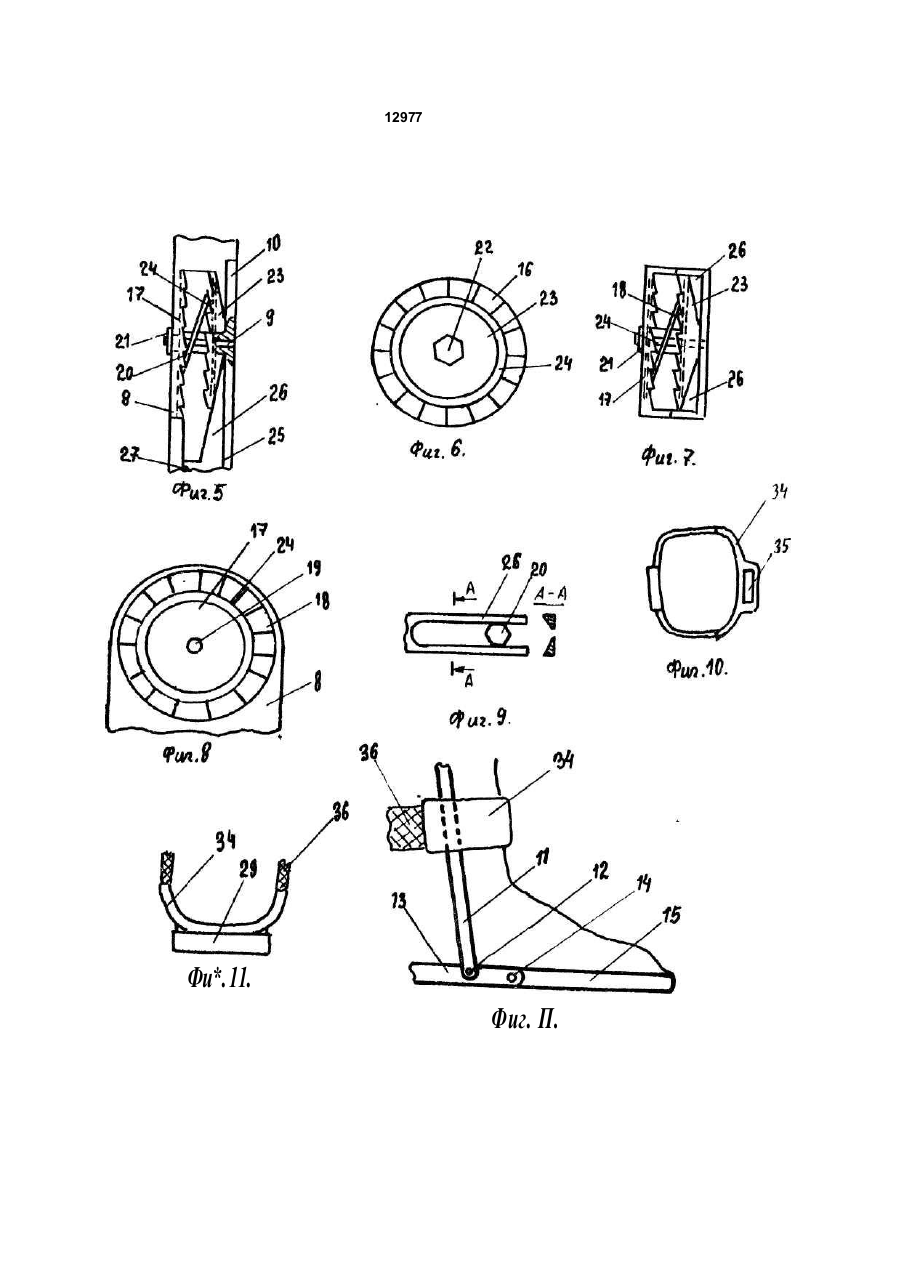
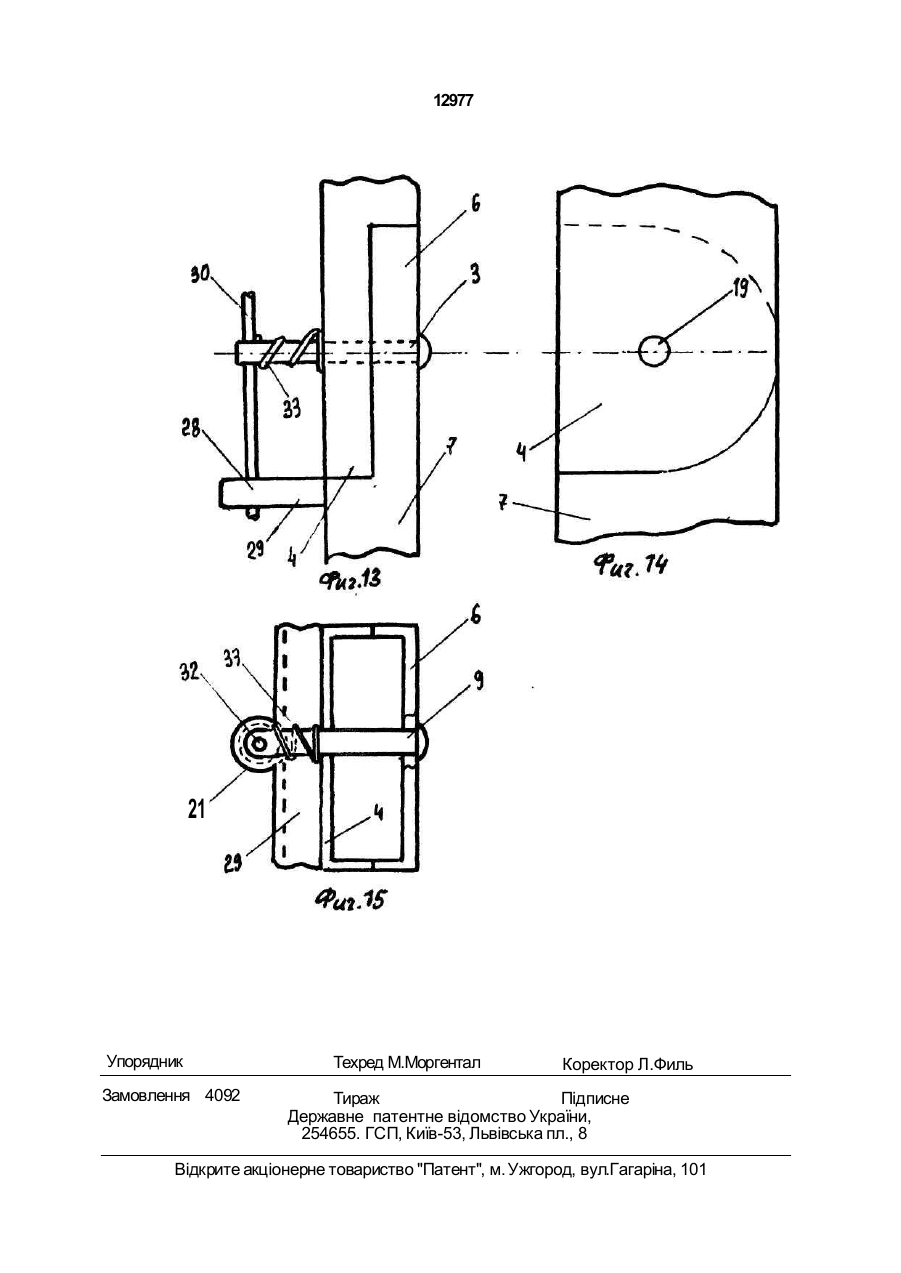
1. Шагопед. содержащий стойки, шарнирно соединенные с планками и с опорной платформой для обуви, привязные и опор ные ремни, устройство регулирования по движности конечности, о т л и ч а ю щ и й с я тем, что в него введены опорный каркас с планками, кинематический механизм с вала ми и шарнирами, при этом устройство регу лирования подвижности конечности выполнено в виде храпового механизма с подвижным и неподвижным зубчатыми колесами и кинематически связанных между собой многогранной втулкой, цилиндрической пружины, при этом кинематический механизм выполнен в виде зубчатых колес и реек, связанных через валы, с опорными стойками для рук, шарнирное соединение для тазобедренного сустава выполнено с удлиненным осевым валом, цилиндрической пружиной и стопорной шайбой, а пружина связана с одним из валов кинематического механизма. 2. Шагопед по п.1,о т л и ч а ю щ и й с я тем, что валы кинематического механизма имеют шарнирное соединение с планками опорного каркаса. С > ю Изобретение относится к медицинской технике, а именно к травматологии и ортопедии. В основу изобретения поставлена задача создания шагопеда, который за счет введения в него новых элементов и формы изменения других позволил бы снять часть нагрузки с мышц ног при движении и поддерживать равновесие за счет использования усилий мышц рук На фиг 1 изображена схема крепления шагопеда на теле человека: на фиг 2 - элементы кинематического механизма передачи мышечных усилий для перемещения ног; на фиг.З - храповой механизм, продольный разрез; на фиг 4 - храповой механизм, вид с торца; на фиг.5 - кинематический механизм передачи мышечных усилий, вид сбоку; на фиг.6 - подвижное храповое колесо храпового механизма; на фиг.7 - храповой механизм, поперечный разрез; на фиг.8 подвижное храповое колесо; на фиг.9 - обжимная вилка храпового механизма; на фиг. 10 - поперечный разрез голеностопной планки; на фиг. 11 - поддерживающая планка с сегментной рейкой; на фиг. 12 - голеностопный узел с элементами крепления; на фиг. 13 - тазобедренный шарнир, вид спереди; на фиг. 14 - тазобедренный шарнир, вид сбоку: на фиг 15 - тазобедренный шарнир, вид сверху. Шагопед (фиг.1, 13, 14, 15) содержит опорный каркас, состоящий из опорного ремня 1 с металлическими дугообразными пластинами 2, рас п оло жен ными в тазобедренной области ремня 1, на которых О 12977 крепится ось 3 тазобедренного шарнира, на которую через цилиндрическое отверстие опирается нижний конец 4 опорной стойки 5 туловища и верхний конец 6 верхней опорной стойки 7 нижней конечности. Верхний и 5 нижний концы 4, 6 выполнены в виде выступа, в нижней части верхней опорной стойки 7 расположен аналогичный выступ 8, соединенный через шарнир осью 9 с таким же (фиг.5,12) выступом 10, расположенным в 10 верхней части опорной стойки 11 нижней конечности, при этом каркас с осью 9 расположен на уровне коленного сустава, нижний конец опорной стойки 11 может быть соединен шарниром 12 с подвижной частью 13 15 опорной платформы^ля обуви, которая шарниром 14 соединена с неподвижной частью 15 платформы. Опорные стойки 5, 7, 11 выполнены полыми, а наружная поверхность их (со стороны тела) адаптирована под кон- 20 фигурацию соответствующих участков тела человека, на верхнем конце 4 опорной стойки 5 расположена (фиг. 1.3) подмышечная опорная планка 16, имеющая мягкое наружное покрытие. Устройство регулирования 25 подвижности коленного шарнира выполнено в виде храпового механизма, для этого внутри выступов 8, 10 жестко закреплено цилиндрическое зубчатое колесо 17, на торцевой поверхности которого расположены 30 (фиг.7, 8, 14) зубья 18. В центре зубчатого колеса выполнено цилиндрическое отверстие для оси 9. Внутри выступов 6, 10 расположена жестко закрепленная (фиг.9) втулка 20, имеющая многогранную наружную по- 35 верхность, которая заканчивается (фиг.5,6) цилиндрическим участком с круговой канавкой 21 дпя ограничительной шайбы, фиксирующей шарнирное соединение. На втулке 20 свободно перемещается в осевом отвер- 40 стии 22 аналогичного профиля конусообразное зубчатое к олесо 23, на основании которого расположены зубья, наклоненные в противоположную сторону от наклона зубьев колеса 17. Между колесом 17 и коле- 45 сом 23 расположена цилиндрическая пружина 24. Внутри выступа 10 опорных стоек 11 имеются тоннели 25. по которым (фиг.8) перемещается обжимная вилка 26, являющаяся верхним участком подвижной части 50 опорных стоек 11. Вилка удерживается от выпадания из неподвижной части опорной стойки 11 ограничительным бортиком 27. Кинематический механизм передачи мышечных усилий рук состоит из зубчатых ко- 55 лес 28 и (фиг.3.11) сегментных реек 29, посаженных на вал 30, закрепляемый либав шарнирах 31, либо продеваемый (фиг. 15) в цилиндрическое отверстие 32 оси 3. Между отверстием 32 и стопорной шайбой в канав ке 21, расположена (фиг. 13,15) цилиндрическая пружина 33. Сегментная рейка, расположенная в подмышечной области со стороны предплечья, с помощью спицы неподвижно крепится в (фиг. 10,11,12) поддерживающей планке 34. Ниже и выше коленного сустава и на уровне голеностопа расположены аналогичные планки, а в теле планок 34 имеется тоннель 35 для перемещения опорных стоек 11, а сами планки 34 крепятся привязными ремнями 36. Устройство работает следующим образом. Тело человека подвешивают в подмышечной области на опорном каркасе, а именно на подмышечных опорных планках 16, которые через опорные стойки 5, 7, 11 удерживают массу тела и груза. Жесткость каркаса обеспечивается, с одной стороны, шарнирами с автоматическим регулированием подвижности, находящимися на уровне коленного сустава, а именно на выступах 8, 10 опорных стоек 7,11, а с другой - усилиями мышц рук, воздействующими через зубчатые колеса 28, сегментные рейки 29, валы 30 на опорные стойки 5, 7. В свою очередь, элементы каркаса крепят к телу человека. Опорные стойки 5 вверху удерживаются планкой 16 в подмышечной области, а внизу - шарниром 3, опорные стойки 7 удерживаются в верхней части тем же шарниром, а в нижней - поддерживающими планками 34, к которым привязными ремнями 36 прикрепляют соответствующий участок конечности человека. Опорные стойки 11 в верхней части крепятся поддерживающей планкой 34 с привязными ремнями 36, в районе коленного сустава (немного ниже шарнира), а в нижней части - аналогично, но в районе голени. Если каркас выполнен с использованием опорных платформ для обуви, то нижний участок опорной стойки (ниже поддерживающей планки 34) крепят шарниром 12 к подвижной части 13 опорной платформы обуви, а через шарнир 14 - к неподвижному участку 15, прикрепленному непосредственно к подошве обуви. Кинематический механизм передачи мышечных усилий рук вмонтирован в элемент каркаса и крепится к предплечью, с одной стороны, в опорной планке 16, а с другой - в поддерживающей планке 34 предплечья, которая, в свою очередь, закреплена привязными ремнями 36, кроме того, в районе опорного ремня (в отверстии 32 оси 3), а также в теле поддерживающей планки 34 опорные стойки 7. В тазобедренной области каркас прикрепляют к телу человека опорным ремнем 1. Жесткость конструкции опорного каркаса обеспечивается тем, что автоматически блокируется подвижность шарнирного соеди 12977 нения на уровне коленного сустава опорной конечности Шарнирное соединение на уровне тазобедренного сустава блокируется усилием мышц рук через элементы кинематического механизма Блокирование по- 5 движности шарнира на уровне коленного сустава происходит за счет того что масса тела (груза) воздействует через опорную планку 16 на опорные стойки 5, 7 которые заблокированы в шарнире тазобедренного 10 сустава, в свою очередь воздействующие на устройство регулирования подвижности коленного шарнира, выполненное в виде храпового механизма, а именно на подвижную часть опорной стойки 11, которая "наполза- 15 ет" на подвижную часть опорной стойки 11, а именно: на вилку 26, которая сдвигает зубчатое колесо 23 по втулке 20 до момента возникновения зубчатого зацепления с зубчатым колесом 17, тем самым блокируется 20 движение коленного сустава так как выступы 8. 10 ограничивают движение опорных стоек 7, 11. Естественно, полное блокирование возможно только при полностью расправленной в коленном суставе конечности, 25 в противном случае остается возможность движения опорных стоек в сторону их полного расправления за счет храпового эффекта зубьев 18 При этом наличие оси 3 на опорных стойках 5, 7, жестко связанной с 30 опорным ремнем 1 (через планку 2). позволяет отодвигать ногу в тазобедренной области, т.е. имеется возможность ставить ноги врозь или вместе, так как шарниры опорных стоек 5, 7 тазобедренного сустава могут пе- 35 редвигаться вдоль оси 3. Блокирование наклона туловища обеспечивается усилием мышц рук. Это происходит за счет воздействия мышечного усилия на опорную планку 34 предплечья, прикрепляемую к телу при- 40 вязными ремнями 36, которая через вал 30 перемещает сегментную рейку 29, зубья которого вступают в зацепление с зубьями колеса 28, затем вновь через вал 30 продетый в отверстие 32 оси 3. закрепленной в металлической дугообразной пластинке 2 опорного ремня 1, через зубчатое соединение с сегментной рейкой 29. размещенной на бедре и жестко скрепленной со стойкой 11 В результате мышцами предплечья создается усилие противодействия наклону туловища в тазобедренной области. Таким образом, в тазобедренной области частично разгружаются мышцы, поддерживающие туловище в вертикальном положении. Перемещение масс тела (груза) на одну из ног либо носки обеих ног освобождает опорные стойки 5, 7, 11, т.е. под действием масс подвижной части 13 опорной платформы, опорной стойки 11 и усилия пружины 20 вилка 19 перемещается вниз, освобождая колесо 23 храпового механизма, которое под усилием пружины 24 отодвигается от зубчатых колес 28, разблокируя тем самым храповой механизм шарнирного соединения. В результате нога приобретает полную подвижность в коленном суставе и при условии воздействия мышц рук на опорную стойку 7, а также собственных мышц ноги возможно осуществление естественного движения ноги, т е шага В случае разблокирования обеих ног, кроме прыжка, возможно и приседание. При этом в момент приседания, а также перенесения тяжести на опорную ногу при ходьбе вновь происходит блокирование подвижности этих шарниров, т.е. работа элементов устройства повторяется. Таким образом, данное устройство позволяет экономить мышечное усилие не только самих ног, но и мышц туловища в тазобедренной области. uezi LL6ZI 12977 Фи*.11. Фиг. П. 12977 21 Упорядник Замовлення 4092 Техред М.Моргентал Коректор Л.Филь Тираж Підписне Державне патентне відомство України, 254655. ГСП, Київ-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Автори англійськоюOsadchyi Yevhen Oleksandrovych
Автори російськоюОсадчий Евгений Александрович
МПК / Мітки
МПК: A63B 23/00
Мітки: крокопед
Код посилання
<a href="https://ua.patents.su/8-12977-krokoped.html" target="_blank" rel="follow" title="База патентів України">Крокопед</a>
Пристрій для шагового пересування “шагопед”
Номер патенту: 7067
Опубліковано: 31.03.1995
Автор: Осадчій Євгеній Олександрович
МПК: A63B 25/00
Мітки: пересування, шагопед, пристрій, шагового
Текст:
...и освобождением за счетбодного расправления конечности в коэтого опорной кнопки 15, расположен- ЗО ленном суставе (в сторону совпадения ной на стойке 5 другой конечности продольных осей стоек 4,5). Тем самым (так как на нее не воздействует массы усилия мышц опорной ноги частично остела и груза). Освобожденная кнопка 15 вобождаются от поддержания массы тела под действием пружины 19 перемещается и г вдоль втулки 17 и выдвигается из ниж- 35...
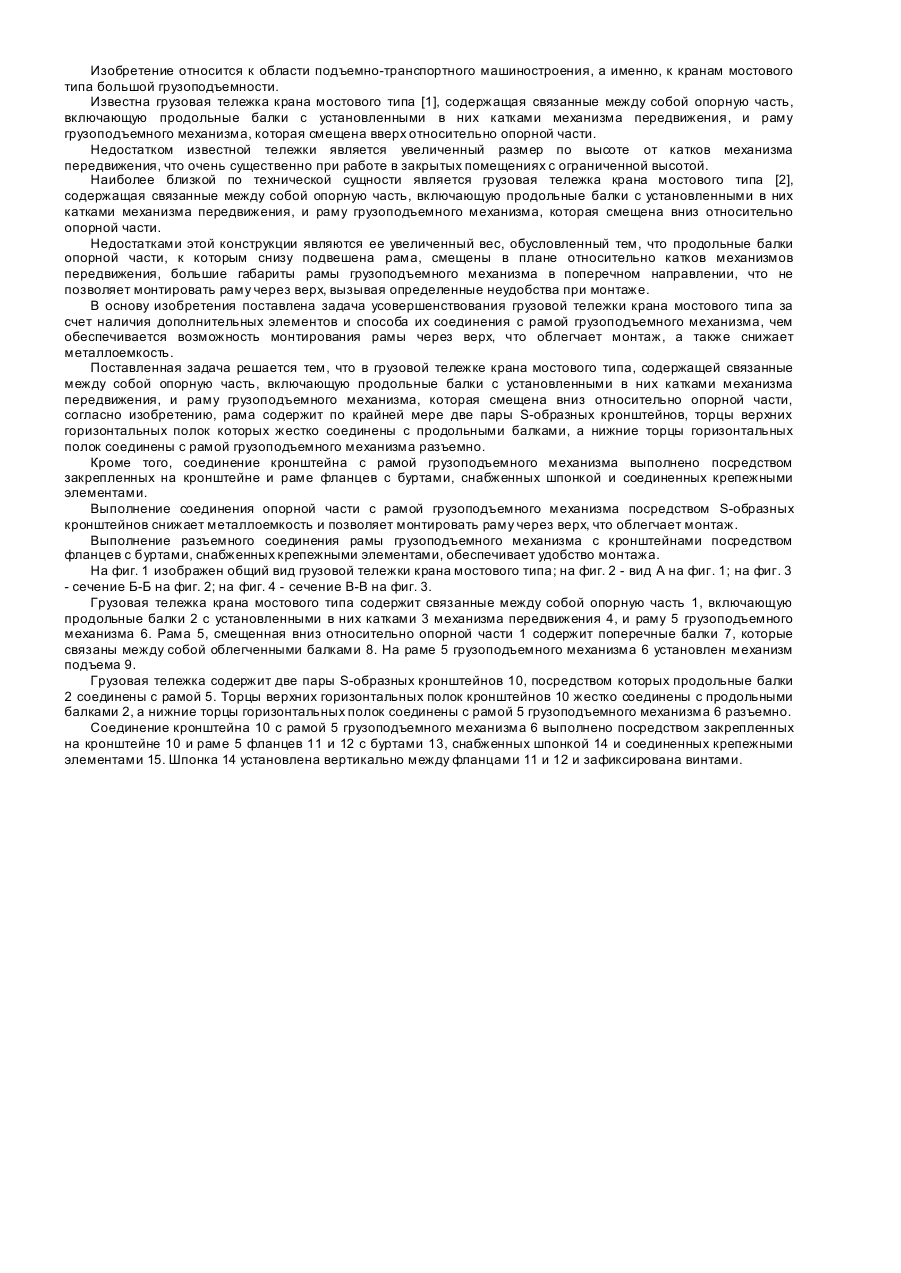
Вантажний візок крана мостового типу
Номер патенту: 4350
Опубліковано: 27.12.1994
Автори: Олімпієв Аркадій Григорович, Бик Аркадій Рувимович, Філь Леонід Андрійович
МПК: B66C 11/00, B66C 7/00
Мітки: вантажний, типу, крана, мостового, візок
Формула / Реферат:
1. Грузовая тележка крана мостового типа, содержащая связанные между собой опорную часть, включающую продольные балки с установленными в них катками механизма передвижения, раму грузоподъемного механизма, которая смещена вниз относительно опорной части, отличающаяся тем, что она содержит по крайней мере две пары S-образных кронштейнов, торцы верхних горизонтальных полок которых жестко соединены с продольными балками, а нижние торцы...
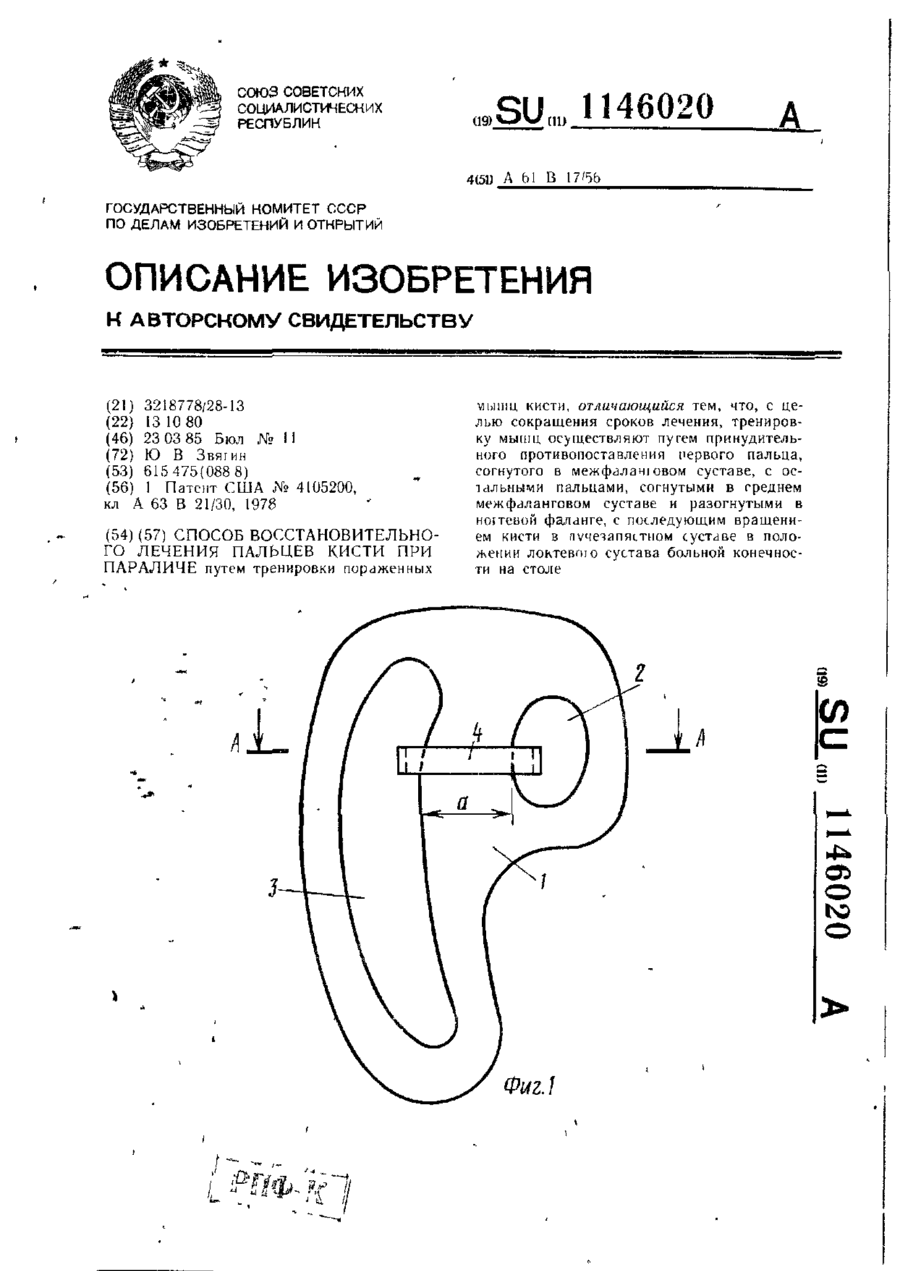
Спосіб відновлюваного лікування пальців руки при паралічі
Номер патенту: 11409
Опубліковано: 25.12.1996
Автор: Звягін Юрій Володимирович
МПК: A61H 1/00
Мітки: лікування, пальців, руки, паралічі, відновлюваного, спосіб
Формула / Реферат:
Способ восстановительного лечения пальцев кисти при параличе путем тренировки пораженных мышц кисти, отличающийся тем, что, с целью сокращения сроков лечения, тренировку мышц осуществляют путем принудительного противопоставления первого пальца, согнутого в межфаланговом суставе, с остальными пальцами, согнутыми в среднем межфаланговом суставе и разогнутыми в ногтевой фаланге, с последующим вращением кисти в лучезапястном суставе в положении...
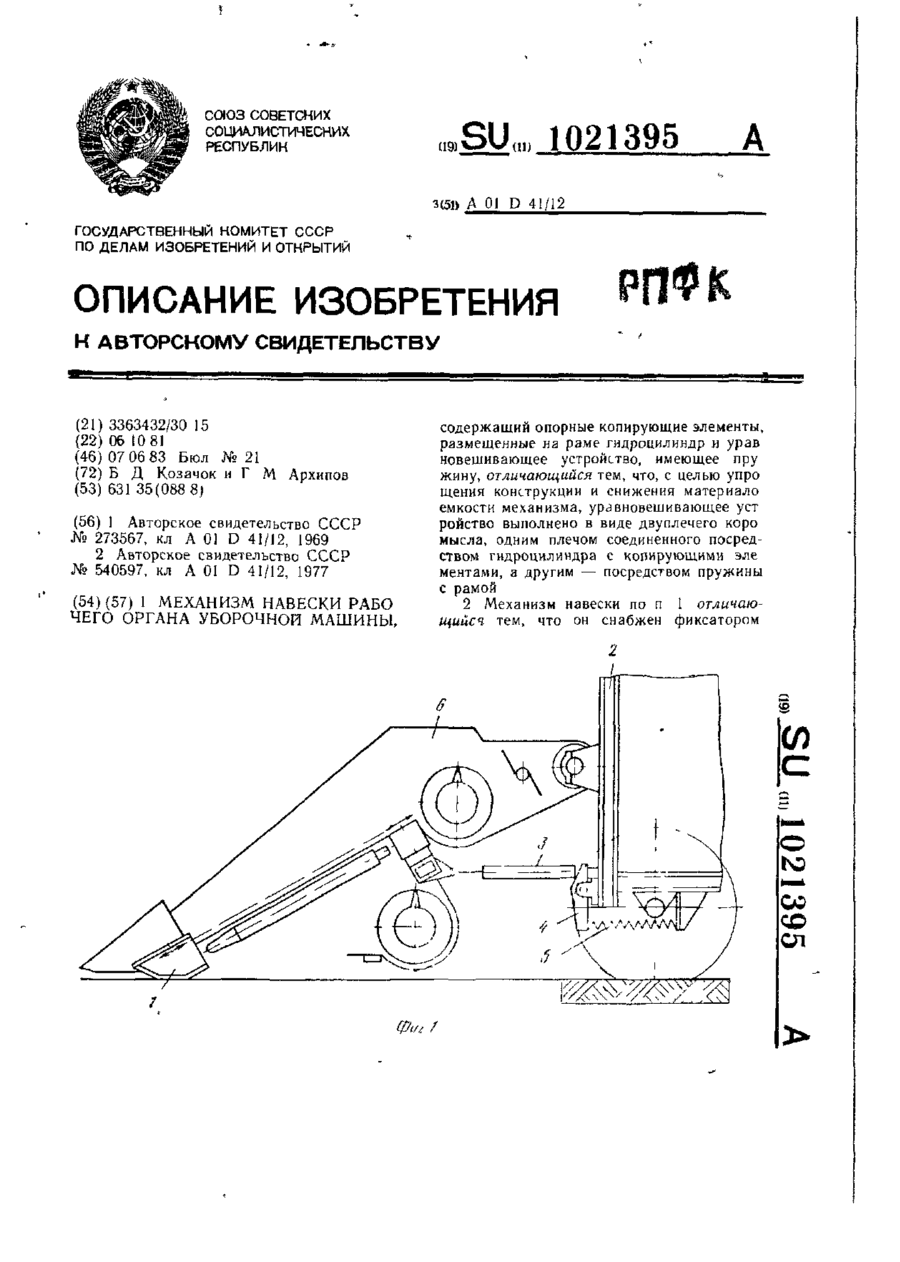
Механізм навішування робочого органу збиральної машини
Номер патенту: 8112
Опубліковано: 26.12.1995
Автори: Архипов Геннадій Матвійович, Козачок Борис Дмитрович
МПК: A01D 41/12
Мітки: органу, механізм, навішування, машини, робочого, збиральної
Формула / Реферат:
1. Механизм навески рабочего органа уборочной машины, содержащий опорные копирующие элементы, размещенные на раме гидроцилиндр и уравновешивающее устройство, имеющее пружину, отличающийся тем, что, с целью упрощения конструкции и снижения материалоемкости механизма, уравновешивающее устройство выполнено в видедвуплечего коромысла, одним плечом соединенного посредством гидроцилиндра с копирующими элементами, а другим - посредством пружины...
Пристрій для монтажу-демонтажу резервуарів на трактор
Номер патенту: 11305
Опубліковано: 25.12.1996
Автори: Бурд Віктор Семенович, Петровський Георгій Миколайович, Піскозуб Збігнєв Йосипович, Стабрин Роман Васильович, Лівач Михайло Іванович, Іванов Володимир Васильович
МПК: A01M 7/00, A01C 23/00
Мітки: трактор, резервуарів, монтажу-демонтажу, пристрій
Формула / Реферат:
1. Устройство монтажа-демонтажа резервуаров на трактор, содержащее кронштейн крепления резервуаров, имеющий две наклонные стойки, снабженные в верхней части седловинами, которые соединены между собой при помощи стяжки регулируемой длины, отличающееся тем, что, с целью уменьшения трудоемкости монтажно-демонтажных работ и повышения коэффициента использования трактора, наклонные стойки выполнены разъемными и снабжены съемными составными...
Попередній патент: Газовий пальник
Наступний патент: Спосіб визначення похибки термоелектричних термометрів
Випадковий патент: Спосіб кольпоцистопластики у жінок