Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів

Формула / Реферат
1. Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів на дорогах, що містить безліч стаціонарно встановлених на дорогах зон контролю, в яких над дорогою встановлені освітлювачі та відеокамери з нахилом вниз відносно горизонтальної площини та з орієнтацією своїх об'єктивів назустріч руху автотранспорту, а також один або декілька комп'ютерів ідентифікації автотранспортних засобів, сервер з монітором для управління та пошуку автотранспортних засобів у базі даних, зв'язаний за допомогою локальної обчислювальної мережі з одним або декількома комп'ютерами ідентифікації, яка відрізняється тим, що вона містить контрольний пункт, комутаційні пристрої та розподілювачі смуг та напрямків руху, при цьому згадані комп'ютери ідентифікації автотранспортних засобів, сервер з монітором та локальна обчислювальна мережа встановлені на пересувному контрольному пункті, комунікаційні пристрої встановлені біля дороги на заданій відстані від відповідних зон контролю та виконані з можливістю підключення до комп'ютерів ідентифікації пересувного контрольного пункту, розподілювачі смуг та напрямків руху встановлені в зонах контролю, кожна з яких являє собою умовний прямокутник, що захоплює локальний відрізок дороги та розмежований відповідними роздільником смуг та напрямків руху, розташованим вздовж дороги з можливістю розмежування зустрічних потоків автотранспорту по довжині шляху, рівній або перевищуючої довжину умовного прямокутника зони контролю, орієнтованої вздовж дороги, а відеокамери зони контролю сполучені з відповідним комунікаційним пристроєм та встановлені, як мінімум, по одній відеокамері в областях, протилежних по діагоналі умовного прямокутника зони контролю.
2. Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів на дорогах за п.1, яка відрізняється тим, що освітлювачі розташовані з можливістю створення вертикальних концентрованих потоків світла з нерівномірним розподіленням його інтенсивності вздовж контрольованої смуги дороги в межах зони контролю так, що максимальна інтенсивність світла припадає на області огляду відеокамер.
3. Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів на дорогах, за п.1, яка відрізняється тим, що освітлювачі виконані з можливістю випромінювання світла інфрачервоного спектра.
4. Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів на дорогах по одному із пп.1, 2, 3, яка відрізняється тим, що вона забезпечена встановленим на контрольному пункті системою відеоспостереження, системою телефонного зв'язку, а також системою телекомунікаційного зв'язку, яка, з одного боку, за допомогою мультиплексора зв'язана з системою відеоспостереження, з системою телефонного зв'язку та вищезгаданою локальною мережею, а, з іншого боку, зв'язана з централізованою базою даних на розшукуваний автотранспорт та пристроєм для зупинки автотранспорту.
Текст
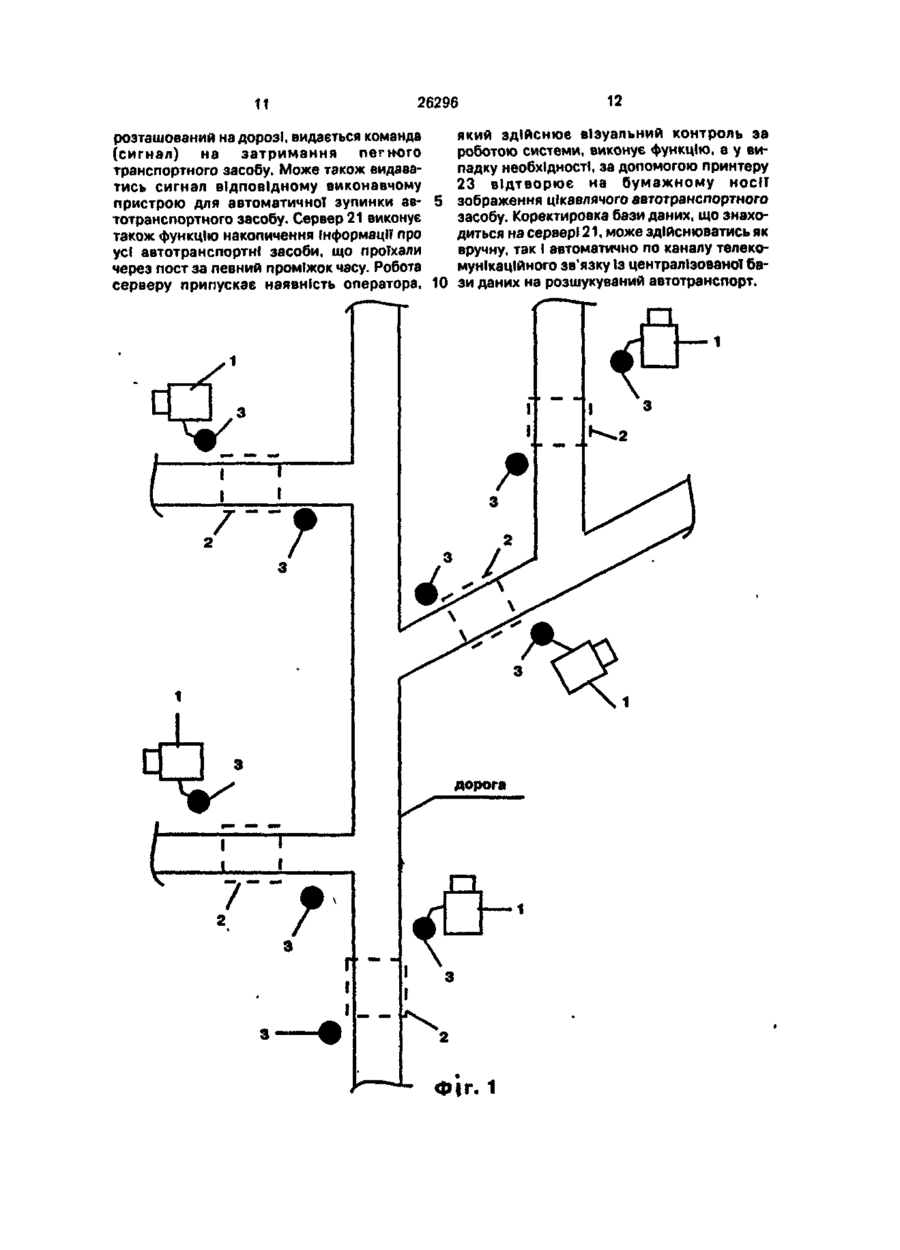
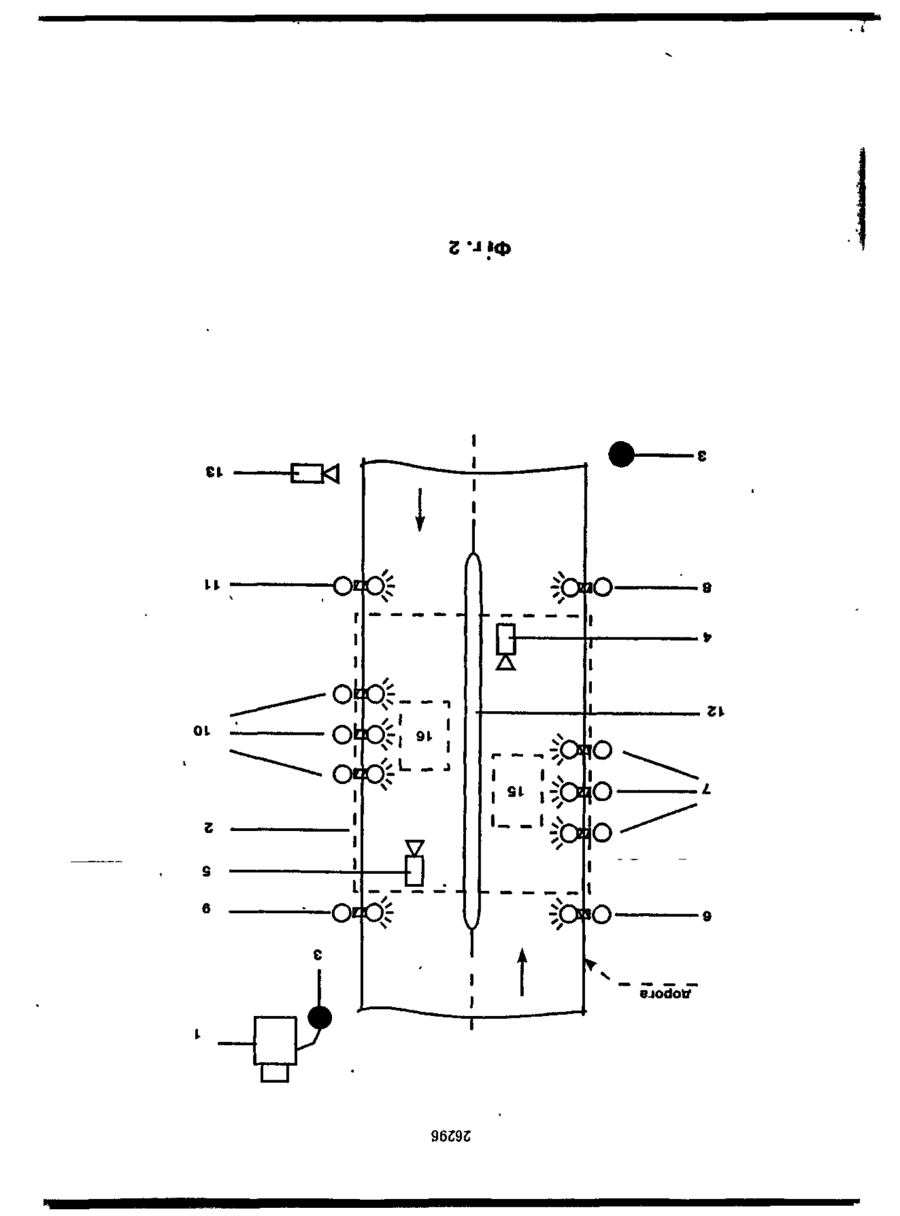
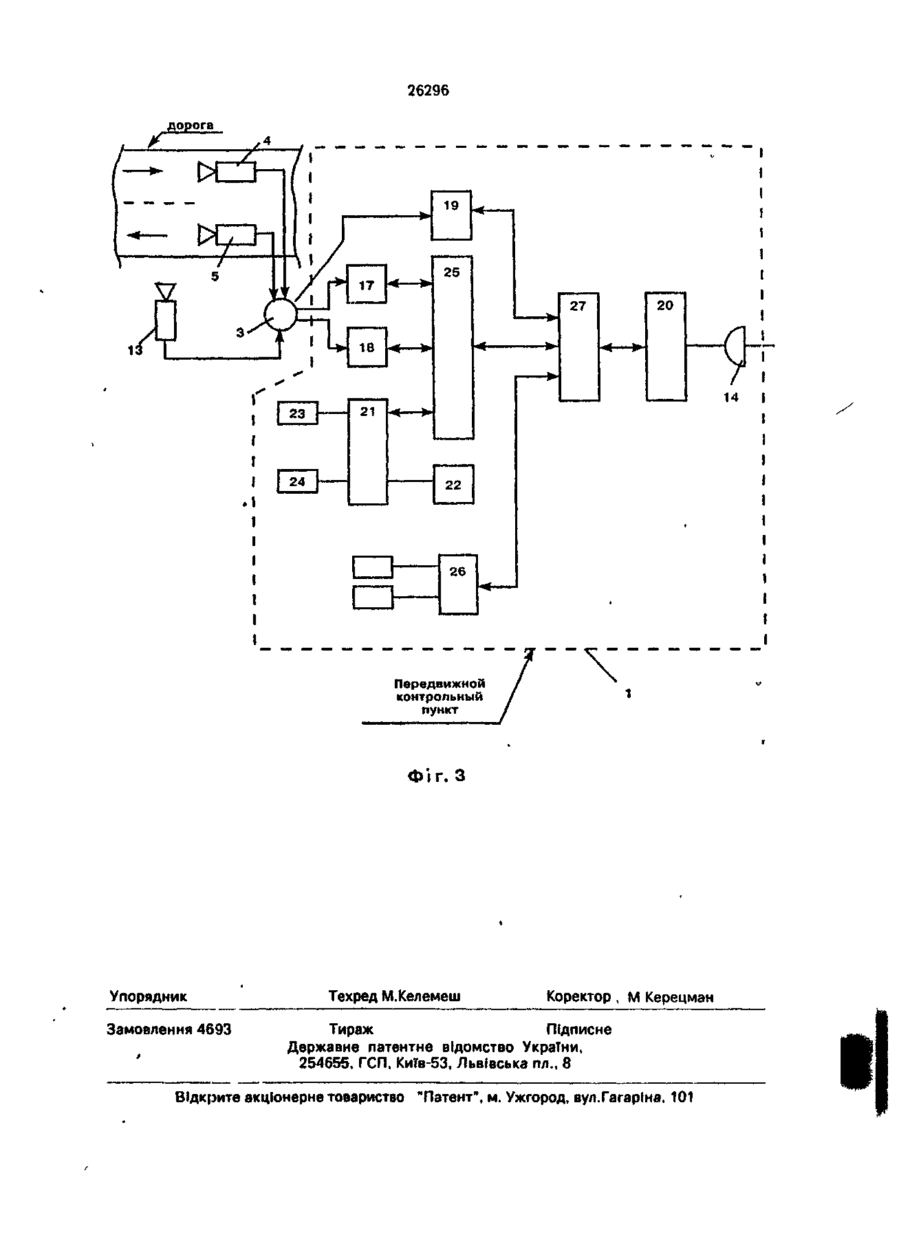
1. Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів на дорогах, що містить безліч стаціонарно встановлених на дорогах зон контролю, в яких над дорогою встановлені освітлювачі та відеокамери з нахилом вниз відносно горизонтальної площини та^з орієнтацією своїх об'єктивів назустріч руху автотранспорту, а також один або декілька комп'ютерів Ідентифікації автотранспортних засобів, сервер з монітором для управління та пошуку автотранспортних засобів у базі даних, зв'язаний за допомогою локальної обчислювальної мережі з одним або декількома комп'ютерами Ідентифікації, яка в і д р і з н я є т ь с я тим, що вона містить контрольний пункт, комутаційні пристрої та розподілювачі смуг та напрямків руху, при цьому згадані комп'ютери Ідентифікації автотранспортних засобів, сервер з монітором та локальна обчислювальна мережа встановлені на пересувному контрольному пункті, комунікаційні пристрої встановлені біля дороги на заданій відстані від відповідних зон контролю та виконані з можливістю підключення до комп'ютерів Ідентифікації' пересувного контрольного пункту, розподілювачі смуг та напрямків руху встановлені в зонах контролю, кожна з яких являє собою умовний прямокутник, що захоплює локальний відрізок дороги та розмежований ВІДПОВІДНИМИ роздільником смуг та напрямків руху, розташованим вздовж дороги з можливістю розмежування зустрічних потоків автотранспорту по довжині шляху, рівній або перевищуючої довжину умовного прямокутника зони контролю, орієнтованої вздовж дороги, а відеокамери зони контролю сполучені з ВІДПОВІДНИМ комунікаційним пристроєм та встановлені, як мінімум, по одній відеокамері в областях, протилежних по діагоналі умовного прямокутника зони контролю. 2. Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів на дорогах за п. 1, яка в і д р і з н я є т ь с я тим, що освітлювачі розташовані з можливістю створення вертикальних концентрованих потоків світла з нерівномірним розподіленням його інтенсивності вздовж контрольованої смуги дороги в межах зони контролю так, що максимальна Інтенсивність світла припадає на області огляду відеокамер. 3. Багатозонова стаціонарно-пересувна сисема контролю за рухом автотранспортних засобів на дорогах, за п. 1, яка в і д р і з н я є т ь с я тим, що освітлювачі виконані з можливістю випромінювання світла Інфрачервоного спектра. 4. Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів на дорогах по одному ізпп. 1,2,3,яка в і д р і з н я є т ь с я тим, С > ю ON ГО О 26296 що вона забезпечена встановленим на контрольному пункті системою відеоспост^реження, системою телефонного зв'язку, а також системою телекомунікаційного зв'язку, яка, з одного боку, за допомогою мультиплексора зв'язана з системою відеоспостереження, з системою телефонного зв'язку та вищезгаданою локальною мережею, а, з Іншого боку, зв'язана з централізованою базою даних на розшукуваний автотранспорт та пристроєм для зупинки автотранспорту. Винахід відноситься до автоматизованих систем контролю потоку автотранспортних засобів на дорогах під час їх руху з використанням систем розпізнавання образів та призначається для виявлення за- 5 явлених на пошук автомобілів І здійснення статистичного обліку автомобілів, що проїжджають. В'домі системи контролю за рухом автотранспортних засобів, що мають пристрої Ю контролю, заснованими за різними фізичними принципами: радіолокаційним, фотоелектричним, індукційним, Доплера та Інш (Авт. св. СРСР № 492211, кл.в 08G 1 /О/, 1973) 15 Відомі винаходи недостатньо ефективні для Ідентифікації автотранспортних засобів внаслідок необхідності додаткового устаткування цих засобів відповідними маркерами. Прототипом є багатозонова система 20 слідкування за рухом автотранспортних засобів, що має безліч стаціонарно установлених на дорогах зон контролю, в кожній Із яких над дорогою встановлені освітлювачі, відеокамери виявлення та розпізнавання з 25 нахилом вниз відносно площини та з орієнтацією своїх об'єктів назустріч руху автотранспорту та керуючий пристрій для координації роботи відеокамер, а також встановлені у віддаленому пункті (у центрі) ЗО комп'ютери Ідентифікації автотранспортних засобів, сервер з монітором для управління та пошуку автотранспортних засобів у базі даних, зв'язаний за допомогою локальної мережі з комп'ютерами Ідентифікації, з яки- 35 ми при цьому з'єднані відеокамери виявлення (заявка РСТ WO 93/19441, опубл. 30.09.93. кл. G08G 1/017). Ознаки, що є спільними для прототипу та заявленого винаходу, заключаються в на- 40 явності безлічі стаціонарно встановлених на дорогах зон контролю, в яких над дорогою встановлені освітлювачі та відеокамери з нахилом вниз відносно горизонтальної площити та з орієнтацією своїх об'єктів назустріч 45 руху Автотранспорту, а також в наявності одного або декількох комп'ютерів Ідентифікації автотранспортних засобів, серверу з монітором для управління та пошуку автотранспортних засобів у базі даних, з'єднаних за допомогою локальної обчислювальної мережі з одним або декількома комп'ютерами Ідентифікації. [Причина, що перешкоджає одержанню у прототипі потрібного технічного результату, полягає у забезпеченні реального масштабу часу тільки для контролю автотранспортних засобів (визначення порушника) та виключно за рахунок спеціалізованих систем телекомунікаційного зв'язку між відеокамерами зон контролю, комп'ютерами поліційного управління (центру) та пересувними поліцейськими нарядами (патрульними машинами). При цьому реал'ьний масштаб часу затримки порушника у відомій системі (прототипі) не забезпечується та потребує для її функціонування достатньої КІЛЬКОСТІ патрульних машин. Використання патрульних машин для затримки порушника робить систему дорогою та підвищує при цьому роль людського фактора у забезпеченні затримки порушника, оскільки поліцейський патрульної машини, отримавши чо системі телекомунікаційного зв'язку відповідну Інформацію Із центрального поліційного управління, вимушений у межах доволі невизначеної зони провадити пошук порушника візуально при постійному русі патрульної машини у потоці автотранспорту, що рухається. Це знижує надійність затримки. Недостатньою є також технічна надійність системи, оскільки система функціонує тільки у комплексі та її роботоспроможність повністю залежить від роботи системи телекомунікаційного зв'язку та комп'ютерів центрального ПОЛІЦІЙНОГО управління. Вихід Із ладу призводить до повної нероботоспроможності цієї системи. Крім того, у прототипі здійснення основних функцій неможливе в принципі без участі системи телекомунікаційного зв'язку, яка при цьому працює в режимі високих напруг через необхідність постійної підтримки в режимі реального часу зв'язку Із відеокамерами, що розподілені по регіону, 26296 центральним комп'ютером та патрульними машинами. З цієї причини система виявлення та затримки автомобілів, що розшукуються, у прототипі являється складною, дорогою та недостатньо надійною. Задача, на рішення якої направлений винахід, заключаюється в створенні багатоланцюгової системи для контролю та затримки автотранспортних засобів, кожна зона контролю якої разом з підключеним до неї пересувним контрольним пунктом працює в автономному режимі при мінімальному телекомунікаційному зв'язку (або без нього) з комп'ютером центрального управління для умов дорожньої системи країн СНД, що відрізняється протяжністю доріг, наявністю головних доріг та концентрованих транспортних вузлів при нормативному обмеженні допустимих зупинок автотранспортних засобів дорожнопатрульними службами. Технічний результат, обумовлюючий рішення задачі, заключається в забезпеченні у реальному масштабі часу на рівні кожного локального автоматизованого посту (окремої зони контролю з підключеним до неї пересувним контрольним пунктом) як безпосередньо контролю всіх автотранспортних засобів, що проходять повз пост, так І прийняття в автоматичному режимі оперативного рішення щодо затримання в межах обмеженого відділку дороги. Це дає можливість економічно та ефективно "закрити" основні магістралі та транспортні вузли регіону сукупно автономно працюючих автоматизованих постів, що суттєво мінімізує, а при використанні технічних засобів для зупинки автотранспорту також виключає людський фактор у забезпеченні затримки порушника. Таке "закриття" забезпечене тим, що зони контролю з відповідними відеокамерами та освітлювачами стаціонарно встановлюють на заданій (великій) території в кількості, необхідній та достатній для рішення не тільки окремої задачі контролю та затримання (перехвату), але й насамперед усіх потенційно можливих задач перехоплювання на цій заданій (великій) території. При цьому кожна окрема задача контролю та затримання вирішується невеликою групою пересувних контрольних пунктів, які по команді Із центру оперативно виїжджають до певних (визначених Інформацією про напрямок руху порушника) зон контролю, приєднуються до них та тим самим "закривають" деяку (меншу) територію можливого находження шуканого порушника. Таким чином, відносно більша КІЛЬКІСТЬ стаціонарно встановлених та недорогих зон 5 10 15 20 25 ЗО 35 40 45 50 55 контролю функціонують з відносно малою кількістю пересувних та дорогих контрольних пунктів, тимчасово залучених до тих чи Інших зон контролю для рішення окремих задач контролю та затримки (захвату). В цьому випадку досягається найбільш прийнятний для російських умов компроміс широтою потенційно контрольованої території та економічність рішення кожної окремої задачі перехвату. При цьому на центральне управління не покладається функція забезпечення реального масштабу часу контролю автотранспортних засобів, а покладається тільки функція оперативного Інформування кожного посту про заново приєднаних у відповідну базу даних машин, що розшукуються, що значно знижує навантаження на телекомунікаційні канали зв'язку та навіть дає можливість роботи без цих каналів, підвищуючи надійність та понижуючи собівартість системи. Досягається технічний результат за рахунок сукупності та спеціального просторового розташування систем та пристроїв, що входять в систему. Досягається технічний результат тим, що багатоланцюгова стаціонарна система контролю за рухом автотранспортних засобів на дорогах, що включає безліч стаціонарно встановлених освітлювачів та відеокамер з нахилом вниз відносно горизонтальної площини та з орієнтацією своїх об'єктивів назустріч руху автотранспорту, а також один чи декілька комп'ютерів Ідентифікації автотранспортних засобів, сервер з монітором для управління та пошуку транспортних засобів в базі даних, з'єднаний за допомогою локальної обчислювальної мережі з одним або декількома комп'ютерами Ідентифікації, згідно з винаходом, містять пересувний контрольний пункт, комунікаційні пристрої та розподільники смуг І напрямків руху, при цьому згадані комп'ютери Ідентифікації автотранспортних засобів, сервер з монітором та локальна обчислювальна мережа встановлені на пересувному контрольному пункті, комунікаційні пристрої встановлені біля дороги на заданій відстані від відповідних зон контролю та виконані з можливістю підключення до комп'ютерів Ідентифікації пересувного контрольного пункту, розподільники смуг І напрямків руху встановлені в зонах контролю, кожна з яких являє собою умовний прямокутник, що захоплює локальну дільницю дороги та обмежений відповідним розподільником смуг І напрямків дороги з можливістю розподілення зустрічних потоків автотранспорту по довжині Тх шляху, рівній або 26296 перевищуючій довжику сторони умовного прямокутника зони контролю, орієнтованої вздовж дороги, а відеокамери зони контролю сполучені з ВІДПОВІДНИМ комунікаційним пристроєм та встановлені, як мінімум, по одній відеокамері в зонах, протилежних по діагоналі кутів умовного прямокутника зони контролю. Досягається технічний результат також тим, що освітлювачі розташовані з можливістю створення вертикальних концентрованих потоків світла з нерівномірним розподіленням його Інтенсивності вздовж контрольованої смуги дороги в межах зони контролю, так що максимальна інтенсивність світла припадає на зону оглядів відеокамер. Досягається технічний результат також тим, що освітлювачі виконано з можливістю випромінювання світла Інфрачервоного спектра. Досягається технічний результат також тим, що -система забезпечена на контрольному пункті системою відеоспостереження, системою телефонного зв'язку, а також системою телекомунікаційного зв'язку, яка з одного боку, за допомогою мультиплексора пов'язана з системою відеоспостереження, з системою телефонного зв'язку та з вищезгаданою локальною обчислювальною мережею, а з Іншого боку, пов'язана з централізованою базою даних на автотранспорт, що розшукується, та пристроєм для зупинки автотранспорту. Відповідність технічного рішення, що заявляється, критерію "новизна" обумовлена наявністю нових відносно прототипу ознак, що перелічені у формул! винаходу. Відповідність технічного рішення критерію "винахідницький рівень" обумовлена наявністю нових відносно рівня техніки ознак зони контролю, полягає в спеціальному просторовому розташуванні зон контролю відносно комунікаційних пристроїв, а також відеокамер, освітлювачів та розподільників смуг 1 напрямків руху ВІДНОСНО ОДИН ОДНОГО КОЖНОЇ ЗОНИ 5 10 15 20 25 ЗО 35 40 45 контролю, що в сполученні з відомими в техніці електронними та програмними засобами забезпечує досягнення нового 50 технічного результату, якого не мають відомі системи того ж значення. На фіг. 1 показане можливе розташування на дорогах безлічі зон контролю за відповідними комунікаційними 55 пристроями; на фіг. 2 - просторове розташування освітлювачів, відеокамер та розподільників смуг І напрямків руху всередині кожної зони контролю; на фіг. З функціональна схема апаратноТ частини 8 апаратно-програмного комплексу пересувного контрольного пункту Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів на дорогах включає: пересувний контрольний пункт 1, забезпечений приміщенням для наряду Із засобами зв'язку та затримки; безліч зон контролю 2, кожна з яких являє собою умовний прямокутник (показаний пунктиром на фіг. 1 І 2), що захоплює певні локальні зони дороги, та, як мінімум, один комунікаційний пристрій 3, встановлений біля дороги на заданій відстані від вказаного прямокутника (приблизно 200 або більше метрів); відеокамери 4 та 5, які встановлені в кожній зоні контролю 2 в протилежних по діагоналі кутах її умовного прямокутника над дорогою на висоті 4, 8 або більше метрів та сполучені кабелями 3 комунікаційним пристроєм 3; освітлювачі 6-11, що встановлені в зоні контролю 2 над дорогою та вздовж дороги на висоті 4, 8 або більше метрів; розподілювач смуг І напряму руху, який виконано, наприклад, у вигляді розподіляючої огорожі 12, встановленого у кожній зоні контролю по її осі для розподілення зустрічних напрямків руху транспорту, а також транспорту, що рухається в одному напрямку; відеокамеру 13 системи відеоспостереження 19 (фіг. 3) за постом та дорожньою обстановкою. Крім того, відеокамери 4 та 5 встановлені над дорогою з нахилом з орієнтацією своїх об'єктів вниз назустріч руху транспорту (нахил на фігурах не показано). Мінімальна рисота установки (4,8 м) визначається вертикальним габаритом транспортних засобів, а максимальна (приблизно 6 м ) - можливістю зчитування номерного знаку автомобіля, що знаходиться протягом короткого часу в зоні огляду 15 (або 16) відповідної відеокамери. Справа в тому, що даний номерний знак має не тільки завжди вертикальну орієнтацію, але в деяких автомобілях розташований під бампером, що потребує нахильного розположення відеокамер 4 та 5 при невеликому куті їх нахилу відносно горизонтальної площини. Освітлювачі 6-11 призначені для забезпечення достатньої для роботи відеокамер 4 та 5 освітленості відповідних зон 15 та 16 їх огляду в будь-який час доби. При цьому, щоб не заважати водію автомобіля, освітлювачі (спектра випромінювання, що можна бачити) розташовані над дорогою з можливістю забезпечення вертикальних потоків світла. Мінімальна висота установки освітлювачів (4,8 м) також обумовлена максимальними 26796 10 централізованою базою даних на вертикальними габаритами транспортних розшукуваний автотранспорт та пристроєм засобів Крім того, освітлювачі розташовані для зупинки автотранспорту, а, з іншого бо вздовж дороги з можливістю створення ку, через мультиплексор 27 (або його нерівномірного потоку світла вздовж дороги Причому максимальний потік світла 5 програмно-функціональний еквівалент) з'єднана з локальною обчислювальною створюється освітлювачами 7 та 10 у мережею 25, системою відеоспостереження відповідних зонах 15 та 16 огляду 19 та системою телефонного зв'язку 26. відеокамер 4 та 5, а мінімальний освітлювачами 6, 8, 9, 11 за межами цих зон Робота багатозонової стаціонарнов місцях поперечних (відносно дороги) 10 пересувної системи контролю за рухом австорін умовних прямокутників 3. Це не- ' тотранспортних засобів здійснюється таким обхідно для усунення різких переходів в чином. освітлюваності дороги в темний час доби, що Початково із централізованої бази дасуттєво для безпеки руху. Однак виконання них на розшукуваний автотранспорт (не поцих умов розташування освітлювачів не яв- 15 казано) по каналу телекомунікаційного ляється обов'язковим у випадку зв'язку 14 та 20 (фіг. 3) через мультиплексор пристосування освітлювачів з 27 та локальну обчислювальну мережу 25 Інфрачервоним випромінюванням. 'здійснюється завантаження в сервер 21 бази даних розшукуваних транспортних заКожна зона контролю 2 має розподілювач смуг 1 напрямків руху, викона- 20 собів. Після цього у відповідності з завданням пересувного контрольного пункний, наприклад, у вигляді розподільчого обту 1 виїжджає в напрямку певної зони меження 12. Це обмеження призначене для контролю 2 на дорозі і зупиняється біля розподілення'двох зустрічних потоків ВІДПОВІДНОГО комунікаційного пристрою 3. транспорту з метою запобігання можливого об'їзду автомобілем (що хоче уникнути 25 При цьому апаратно-програмний комплекс, контролю) відповідної зони огляду 15 або 16 розташований на контрольному пункті 1, відеокамери 4 або 5 шляхом виходу його підключають за допомогою гнучкого кабелю (автомобіля) на смугу зустрічного руху. Мета та відповідного роз'єму до комунікаційного досягається тим, що довжина обмежування пристрою 3, внаслідок чого відеокамери 4 та 12 дорівнює або більше поздовжньої ЗО '5 виявляються з'єднаними з комп'ютерами (відносно дороги) сторони умовного 17 та 18, а відеокамера 13 - з системою 19. прямокутника 2. Однак наявність обмеженПотім, при необхідності, вмикають ня не є обов'язковим у разі нанесення смуг освітлення зони контролю 2 та здійснюють розмічення проїжджої частини. контроль за рухом автотранспортних заСистема також має апаратно- 35 собів без їх зупинки. При цьому відеокамери програмний комплекс (фіг. 3), встановлений 4 та 5 сумісно з комп'ютерами 17 та 18, на пересувному контрольному пункті 1 (на забезпеченими відповідним програмним зафіг. З цей пункт накреслено штриховою безпеченням, здійснюють ідентифікацію лінією). Комплекс включає комп'ютери 17 та (визначення номеру, кольору та типу) 18 ідентифікації транспортного засобу, з 40 транспортного засобу, що проїжджає через яким за допомогою комунікаційних відповідну зону спостереження 15 та 16 вкапристроїв 3 з'єднуються на певний час заних відеокамер (фіг. 2). Дана Ідентифікація відеокамери 4 та 5; сервер 21 з монітором здійснюється шляхом захоплення 22, принтером 23 та маніпулятором 24 для зображення об'єкту (транспортного засобу), управління та пошуку транспортних засобів 45 супроводження його в зоні видимості 15 або у базі даних; локальну мережу 25, що зв'язує 16 відеокамер 4 або 5, а також розпізнання між собою згадані комп'ютери Ідентифікації об'єкту, що включає його номер та сервер; систему відеоспостереження 19, держреєстрації, кольору та типу. з'єднану з відеокамерою 13 через коПровадиться також вимірювання швидкості мунікаційний пристрій 3, причому 50 та контроль швидкості руху аввідеокамера 13 виконана поворотною та тотранспортного засобу через зону призначена для візуального спостереження контролю шляхом фіксації вимірювання за постом та дорогою; систему 26 телефонзображення при різних його положеннях ного зв'язку з відповідними телефонними відносно відповідної відеокамери за певний апаратами, яка забезпечує мовний зв'язок 55 проміжок часу. Результати розпізнавання контрольного пункту з черговою частиною передаються в сервер 21, де проводиться або з централізованою базою даних на порівняння результатів з наявною базою дарозшукуваний автотранспорт; систему 20 них автотранспортних засобів, що телекомунікаційного зв'язку, яка, з одного підлягають затриманню. У випадку боку, за допомогою антени 14 сполучена з співпадання, відповідному наряду, що 26296 11 розташований на дорозі, видається команда (сигнал) на затримання пегжко транспортного засобу. Може також видаватись сигнал відповідному виконавчому пристрою для автоматичної зупинки автотранспортного засобу. Сервер 21 виконує також функцію накопичення інформації про усі автотранспортні засоби, що проїхали через пост за певний проміжок часу. Робота серверу припускає наявність оператора, 10 який здійснює візуальний контроль за роботою системи, виконує функцію, а у випадку необхідності, за допомогою принтеру 23 відтворює на бумажному носії зображення цікавлячого автотранспортного засобу. Коректировка бази даних, що знаходиться на сервері 21, може здійснюватись як вручну, так І автоматично по каналу телекомунікаційного зв'язку Із централізованої бази даних на розшукуваний автотранспорт. т Т 7 12 П з— Ф»Г. г М*Ф Bjodot/ 26296 дорога 13 Передвижной контрольный пункт Фіг. З Упорядник Замовлення 4693 ' Техред М.Келемеш Коректор , М Керецман Тираж Підписне Державне патентне відомство України, 254655, ГСП, КиТв-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул.ГагарІна, 101
ДивитисяДодаткова інформація
Автори англійськоюMovchan Volodymyr Petrovych
Автори російськоюМовчан Владимир Петрович
МПК / Мітки
МПК: G08G 1/017
Мітки: контролю, багатозонова, автотранспортних, засобів, система, стаціонарно-пересувна, рухом
Код посилання
<a href="https://ua.patents.su/8-26296-bagatozonova-stacionarno-peresuvna-sistema-kontrolyu-za-rukhom-avtotransportnikh-zasobiv.html" target="_blank" rel="follow" title="База патентів України">Багатозонова стаціонарно-пересувна система контролю за рухом автотранспортних засобів</a>
Спосіб дезактивації покришок автотранспортних засобів
Номер патенту: 18950
Опубліковано: 25.12.1997
Автори: Рубцов Віталій Олександрович, Кошарний Микола Федорович, Гернер Валерій Самойлович, Білецький Володимир Олександрович, Наумець Анатолій Віталійович
МПК: G21F 9/28
Мітки: спосіб, автотранспортних, дезактивації, засобів, покришок
Формула / Реферат:
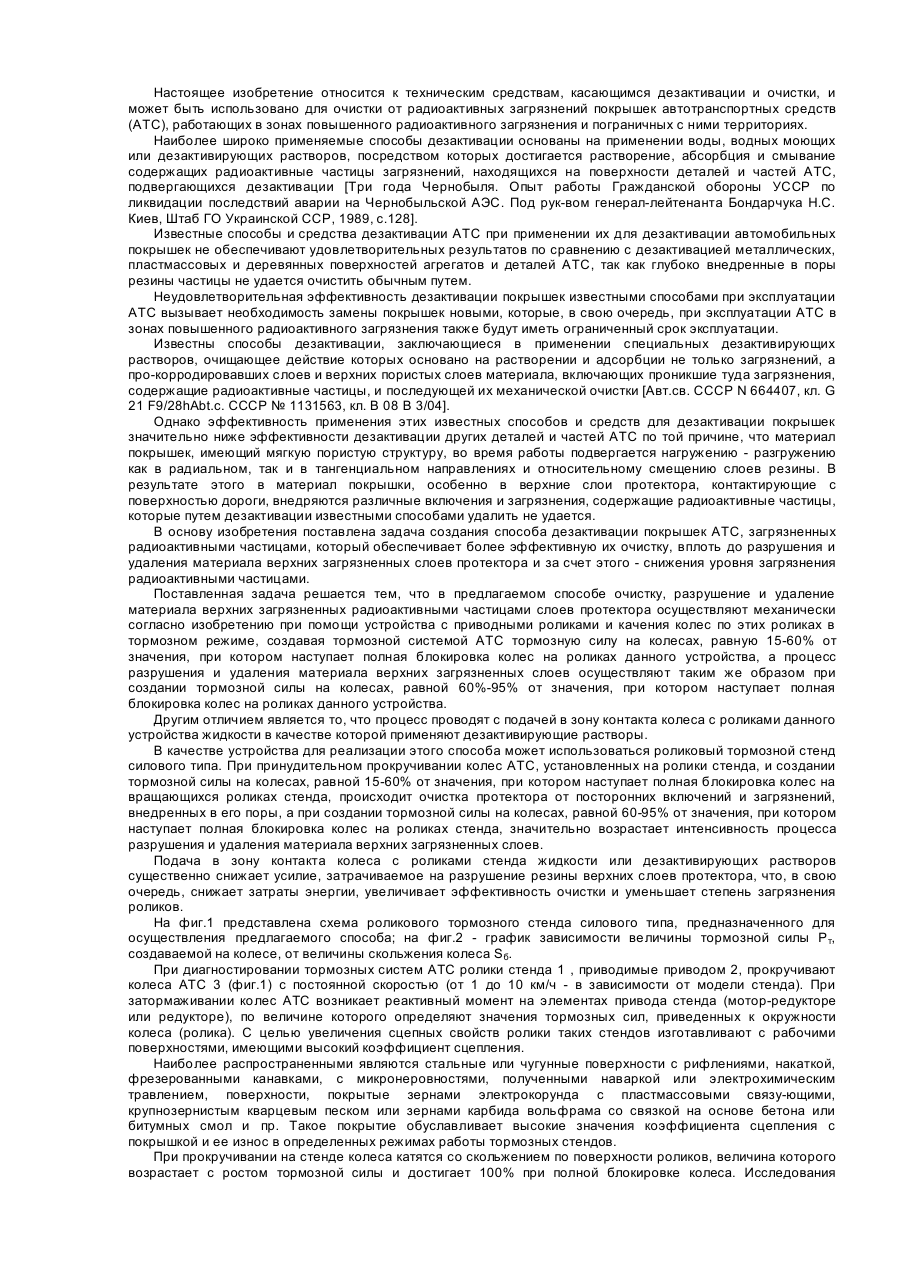
1. Способ дезактивации покрышек автотранспортных средств, загрязненных радиоактивными частицами, включающий очистку, разрушение и удаление материала верхних загрязненных слоев протектора покрышки, отличающийся тем, что процесс очистки верхних загрязненных слоев осуществляют механически при принудительном прокручивании колес автотранспортного средства при помощи устройства с приводными роликами и качения колес по этим роликам в тормозном...
Пристрій автоматичного контролю швидкості, зупинки і забезпечення управління рухом транспорту

Номер патенту: 25076
Опубліковано: 25.12.1998
Автор: Малон Жан-П`єр
Мітки: автоматичного, швидкості, управління, контролю, транспорту, зупинки, рухом, пристрій, забезпечення
Об’єднана гідравлічна система транспортних засобів
Номер патенту: 10635
Опубліковано: 25.12.1996
Автори: Войчак Григорій Васильович, Восковец Сергій Валентинович, Рудий Леонід Фомич, Заграновський Ілля Васильович, Чайковський Валерій Станіславович, Подригало Михайло Абович
МПК: B60T 13/10
Мітки: засобів, система, гідравлічна, транспортних, об'єднана
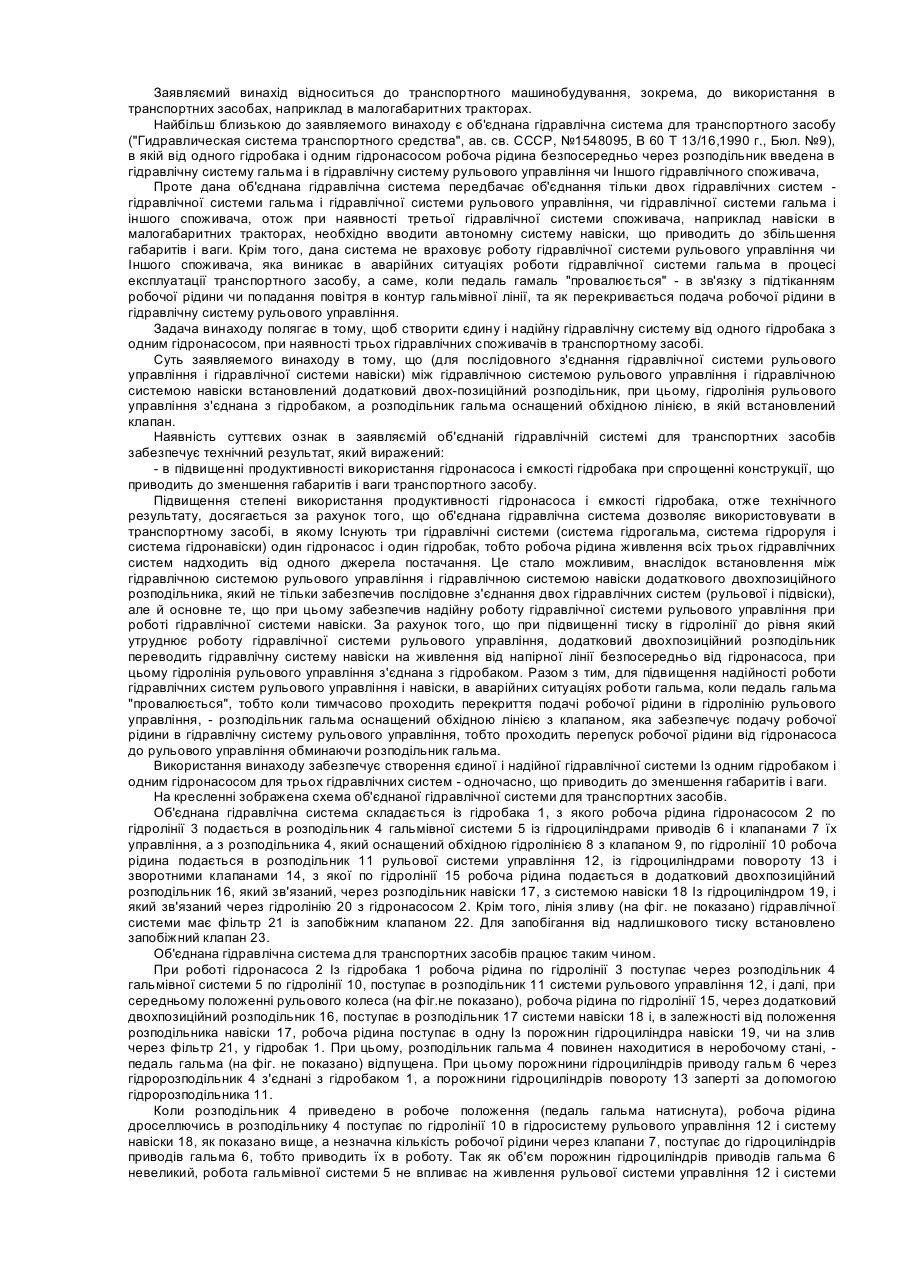
Формула / Реферат:
Об'єднана гідравлічна система транспортних засобів, що складається з одного гідробака із якого робоча рідина одним гідронасосом введена безпосередньо через розподільник гальма і в гідравлічну систему гальма і в гідравлічну систему рульового управління, а також мас гідравлічну систему навіски, яка відрізняється тим, що між гідравлічною системою рульового управління і гідравлічною системою навіски встановлений додатковий двохпо-зиційний...
Спосіб управління рухом транспортного засобу
Номер патенту: 18699
Опубліковано: 25.12.1997
Автори: Охріменко Володимир Дмитрович, Саприкін Микола Олександрович, Андреєв Сергій Іванович, Кизима Станіслав Степанович, Баліцький Сергій Олександрович, Павлюк Дмитро Олександрович
МПК: G08G 1/01
Мітки: рухом, засобу, транспортного, спосіб, управління
Формула / Реферат:
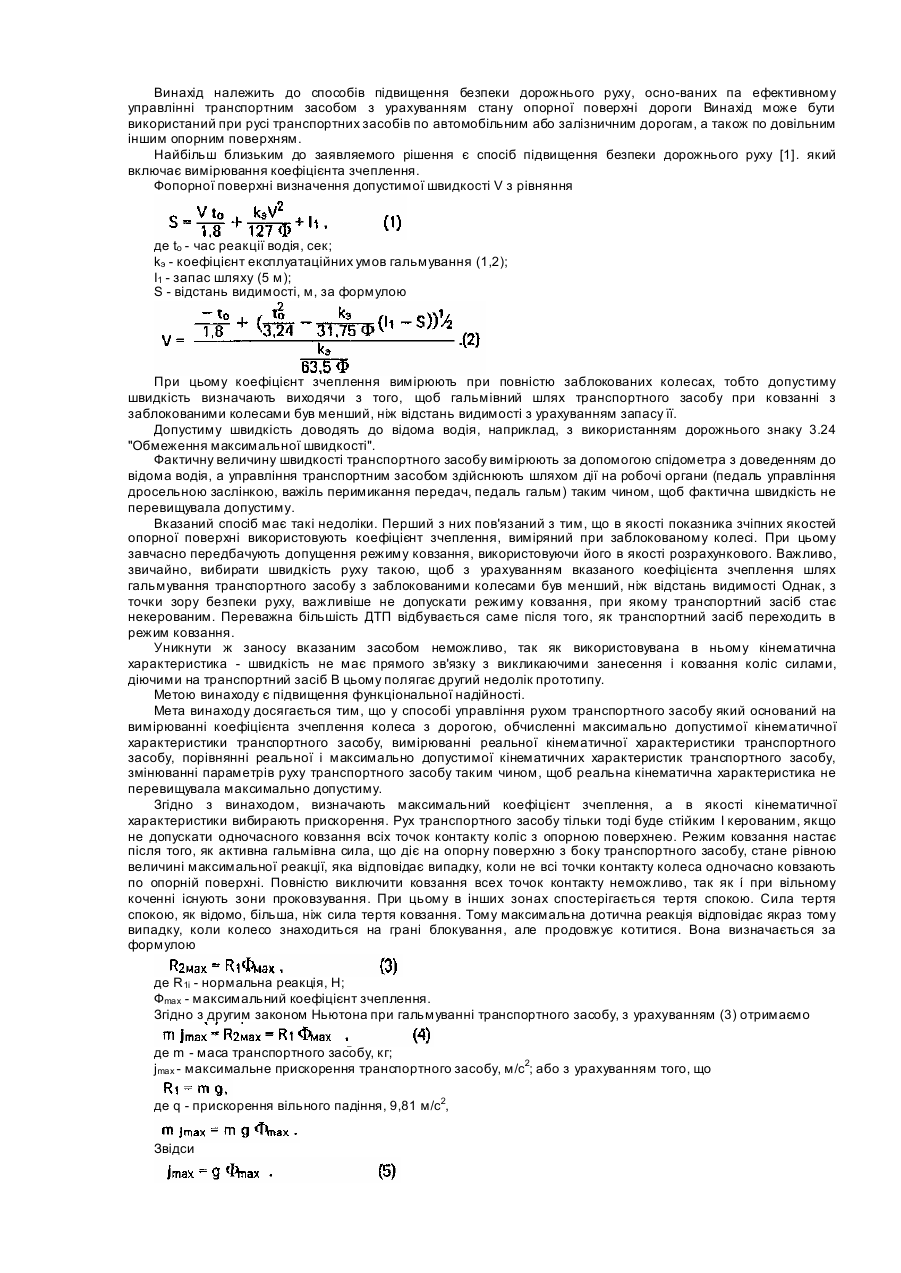
Способ управления движением транспортного средства, основанный на измерении коэффициента сцепления колес с дорогой, вычислении максимально допустимой кинематической характеристики транспортного средства, измерении реальной кинематической характеристики транспортного средства, сравнении реальной и максимально-допустимой кинематических характеристик транспортного средства, изменении параметров движения транспортного средства таким образом,...
Система газопостачання транспортних засобів
Номер патенту: 13539
Опубліковано: 25.04.1997
Автори: Рідченко Олександр Володимирович, Ігітов Олександр Сергійович, Биков Олександр Констянтинович
МПК: F17C 5/00
Мітки: газопостачання, система, засобів, транспортних
Формула / Реферат:
1. Система газоснабжения транспортных средств, содержащая соединенные между собой компрессор, холодильник, резервуары для сжатого газа, эжектор и распределительное устройство, сообщающее компрессор с магистральным трубопроводом напрямую или через пассивное сопло эжектора, активное сопло которого подключено при этом к выходу компрессора, отличающаяся тем, что, с целью повышения надежности в работе, она снабжена источником тарированного...
Попередній патент: Одноразовий інгалятор
Наступний патент: Стаціонарний пост контролю за рухом автотранспортних засобів (його варіанти)
Випадковий патент: Індикатор напруги