Спосіб управління рухом транспортного засобу
Номер патенту: 18699
Опубліковано: 25.12.1997
Автори: Павлюк Дмитро Олександрович, Баліцький Сергій Олександрович, Кизима Станіслав Степанович, Саприкін Микола Олександрович, Андреєв Сергій Іванович, Охріменко Володимир Дмитрович
Формула / Реферат
Способ управления движением транспортного средства, основанный на измерении коэффициента сцепления колес с дорогой, вычислении максимально допустимой кинематической характеристики транспортного средства, измерении реальной кинематической характеристики транспортного средства, сравнении реальной и максимально-допустимой кинематических характеристик транспортного средства, изменении параметров движения транспортного средства таким образом, чтобы реальная кинематическая характеристика не превышала максимально допустимую, отличающийся тем, что определяют максимальный коэффициент сцепления, а в качестве кинематической характеристики транспортного средства выбирают ускорение.
Текст
Винахід належить до способів підвищення безпеки дорожнього руху, осно-ваних па ефективному управлінні транспортним засобом з урахуванням стану опорної поверхні дороги Винахід може бути використаний при русі транспортних засобів по автомобільним або залізничним дорогам, а також по довільним іншим опорним поверхням. Найбільш близьким до заявляемого рішення є спосіб підвищення безпеки дорожнього руху [1]. який включає вимірювання коефіцієнта зчеплення. Фопорної поверхні визначення допустимої швидкості V з рівняння де to - час реакції водія, сек; kэ - коефіцієнт експлуатаційних умов гальмування (1,2); І1 - запас шляху (5 м); S - відстань видимості, м, за формулою При цьому коефіцієнт зчеплення вимірюють при повністю заблокованих колесах, тобто допустиму швидкість визначають виходячи з того, щоб гальмівний шлях транспортного засобу при ковзанні з заблокованими колесами був менший, ніж відстань видимості з урахуванням запасу її. Допустиму швидкість доводять до відома водія, наприклад, з використанням дорожнього знаку 3.24 "Обмеження максимальної швидкості". Фактичну величину швидкості транспортного засобу вимірюють за допомогою спідометра з доведенням до відома водія, а управління транспортним засобом здійснюють шляхом дії на робочі органи (педаль управління дросельною заслінкою, важіль перимикання передач, педаль гальм) таким чином, щоб фактична швидкість не перевищувала допустиму. Вказаний спосіб має такі недоліки. Перший з них пов'язаний з тим, що в якості показника зчіпних якостей опорної поверхні використовують коефіцієнт зчеплення, виміряний при заблокованому колесі. При цьому завчасно передбачують допущення режиму ковзання, використовуючи його в якості розрахункового. Важливо, звичайно, вибирати швидкість руху такою, щоб з урахуванням вказаного коефіцієнта зчеплення шлях гальмування транспортного засобу з заблокованими колесами був менший, ніж відстань видимості Однак, з точки зору безпеки руху, важливіше не допускати режиму ковзання, при якому транспортний засіб стає некерованим. Переважна більшість ДТП відбувається саме після того, як транспортний засіб переходить в режим ковзання. Уникнути ж заносу вказаним засобом неможливо, так як використовувана в ньому кінематична характеристика - швидкість не має прямого зв'язку з викликаючими занесення і ковзання коліс силами, діючими на транспортний засіб В цьому полягає другий недолік прототипу. Метою винаходу є підвищення функціональної надійності. Мета винаходу досягається тим, що у способі управління рухом транспортного засобу який оснований на вимірюванні коефіцієнта зчеплення колеса з дорогою, обчисленні максимально допустимої кінематичної характеристики транспортного засобу, вимірюванні реальної кінематичної характеристики транспортного засобу, порівнянні реальної і максимально допустимої кінематичних характеристик транспортного засобу, змінюванні параметрів руху транспортного засобу таким чином, щоб реальна кінематична характеристика не перевищувала максимально допустиму. Згідно з винаходом, визначають максимальний коефіцієнт зчеплення, а в якості кінематичної характеристики вибирають прискорення. Рух транспортного засобу тільки тоді буде стійким І керованим, якщо не допускати одночасного ковзання всіх точок контакту коліс з опорною поверхнею. Режим ковзання настає після того, як активна гальмівна сила, що діє на опорну поверхню з боку транспортного засобу, стане рівною величині максимальної реакції, яка відповідає випадку, коли не всі точки контакту колеса одночасно ковзають по опорній поверхні. Повністю виключити ковзання всех точок контакту неможливо, так як ί при вільному коченні існують зони проковзування. При цьому в інших зонах спостерігається тертя спокою. Сила тертя спокою, як відомо, більша, ніж сила тертя ковзання. Тому максимальна дотична реакція відповідає якраз тому випадку, коли колесо знаходиться на грані блокування, але продовжує котитися. Вона визначається за формулою де R1i - нормальна реакція, Н; Фmax - максимальний коефіцієнт зчеплення. Згідно з другим законом Ньютона при гальмуванні транспортного засобу, з урахуванням (3) отримаємо де m - маса транспортного засобу, кг; jmax - максимальне прискорення транспортного засобу, м/с2; або з урахуванням того, що де q - прискорення вільного падіння, 9,81 м/с2, Звідси Таким чином, умова недопущення ковзання полягає в тому, щоб прискорення (сповільнення) транспортного засобу j задовольняло умові де jmax визначається за формулою (5). Обчислене за формулою (5) значення допустимого прискорення доводять до відома водія. вимірювання фактичного прискорення виконують вимірювачами прискорення. Отриману при вимірюваннях інформацію доводять до відома водія, наприклад, аналогічно тому, як це роблять при вимірюваннях швидкості, тобто зображуючи значення j на циферблаті, який встановлено на щиткові приладів. Управління транспортним засобом здійснюють шляхом дії на робочі органи (педаль управління дросельною заслонкою, педаль гальма і ін.) таким чином, щоб фактичне прискорення не перевищувало допустиме. При цьому виключається можливість ковзання коліс і заносу транспортного засобу. Замість розпливчатого формулювання "Водій не справився з управлінням. Автомобіль занесло, яке часто зустрічається у висновках ДАI про причини дорожньо-транспортних пригод, пропонований спосіб дає відповідь на питання, як управляти транспортним засобом таким чаном, щоб ці причини не виникали. Крім того, використання запропонованого способу за рахунок недопускання режиму ковзання дозволяє зменшити гальмівний шлях. В результаті підвищитьС5ї безпека дорожнього руху. Наведені вище викладки відносяться і до поперечного прискорення а, величина якого де k - кривизна траєкторії транспортного засобу, 1/м; V - швидкість руху, м/с. Це означає, що наведена в формулі сукупність признаків розповсюджується і на поперечне прискорення з єдиною відмінністю в тому, що фактичною величиною цієї характеристики водій може управляти шляхом повороту керма (від якого залежить фактична кривизна), так, щоб Використання пропонованого способу продемонструємо на прикладі. На ділянці дороги вимірюють максимальний коефіцієнт зчеплення Фmах. Це можна зробити, наприклад, шляхом використання відомих динамометричних пристроїв. Результат вимірювання Фmах = 0,38. За формулою (5) jmax = 0,38 x 9.81 м/с2 = 3,72 м/с2. Отримане значення, округлене до 3,7 (з надлишком) наносять на новий дорожній знак "Обмеження максимального прискорення" І встановлюють його в зоні видимості водіїв транспортних засобів, що рухаються по цій ділянці дороги. Вимірювання фактичного прискорення (сповільнення) здійснюють, наприклад, встановленими на транспортних засобах деселерометрами серійного виробництва, наприклад, маятникового типу, відхилення від вертикального положення маятників яких пропорційне прискоренню (сповільненню). Показуючий пристрій деселерометра розміщують в полі зону водія, аналогічно спідометру. Управління транспортним заходом здійснюють шляхом дії на його робочі органи таким чином, щоб фактичне прискорення не перевищувало допустиме. В якості вимірювача прискорення можуть бути використані прилади, що ди ференцують показання спідометра.
ДивитисяДодаткова інформація
Назва патенту англійськоюControl method for flow of traffic
Автори англійськоюPavliuk Dmytro Oleksandrovych, Kyzyma Stanislav Stepanovych, Andreiev Serhii Ivanovych, Okhrimenko Volodymyr Dmytrovych, Saprykin Mykola Oleksandrovych, Balitskyi Serhii Oleksandrovych
Назва патенту російськоюСпособ управления движением транспортного средства
Автори російськоюПавлюк Дмитрий Александрович, Кизима Станислав Степанович, Андреев Сергей Иванович, Охрименко Владимир Дмитриевич, Сапрыкин Николай Александрович, Балицкий Сергей Александрович
МПК / Мітки
МПК: G08G 1/01
Мітки: спосіб, управління, засобу, транспортного, рухом
Код посилання
<a href="https://ua.patents.su/2-18699-sposib-upravlinnya-rukhom-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління рухом транспортного засобу</a>
Спосіб автоматичного управління рухом транспортного засобу
Номер патенту: 13290
Опубліковано: 28.02.1997
Автори: Кизима Станіслав Степанович, Павлюк Дмитро Олександрович
МПК: G08G 1/052, B60T 8/72
Мітки: автоматичного, рухом, спосіб, транспортного, управління, засобу
Формула / Реферат:
(57) Способ автоматического управления движением транспортного средства, основанный на определении текущего значения ускорения транспортного средства и формировании управляющего воздействия на органы, связанные с движущим или тормозным приводом, отличающийся тем, что формируют соответствующий текущему значению ускорения транспортного средства сигнал динамической перегрузки, по значению которого осуществляют формирование управляющего...
Спосіб зменшення осліпленості водія світлом фар зустрічного транспортного засобу
Номер патенту: 20100
Опубліковано: 25.12.1997
Автор: Ковалишин Богдан Михайлович
МПК: F21S 8/10
Мітки: зустрічного, засобу, світлом, зменшення, фар, транспортного, водія, спосіб, осліпленості
Формула / Реферат:
Спосіб зменшення осліпленості водія світлом фар зустрічного транспортного засобу, що включає зменшення контрастності між освітленням смуг зустрічного і попутного руху шляхом використання додаткового джерела освітлення, який відрізняється тим, що контрастність між освітленням смуг зустрічного і попутного руху транспорту зменшують шляхом освітлення смуги зустрічного руху додатковим джерелом, встановленим в задній частині кожного транспортного...
Система управління фрікційними гідромуфтами двохпоточної коробки передач транспортного засобу
Номер патенту: 11824
Опубліковано: 25.12.1996
Автори: Каменев Василь Ніонілович, Ілющенко Микола Васильович
МПК: B60W 10/10
Мітки: управління, транспортного, фрікційними, передач, система, гідромуфтами, двохпоточної, коробки, засобу
Формула / Реферат:
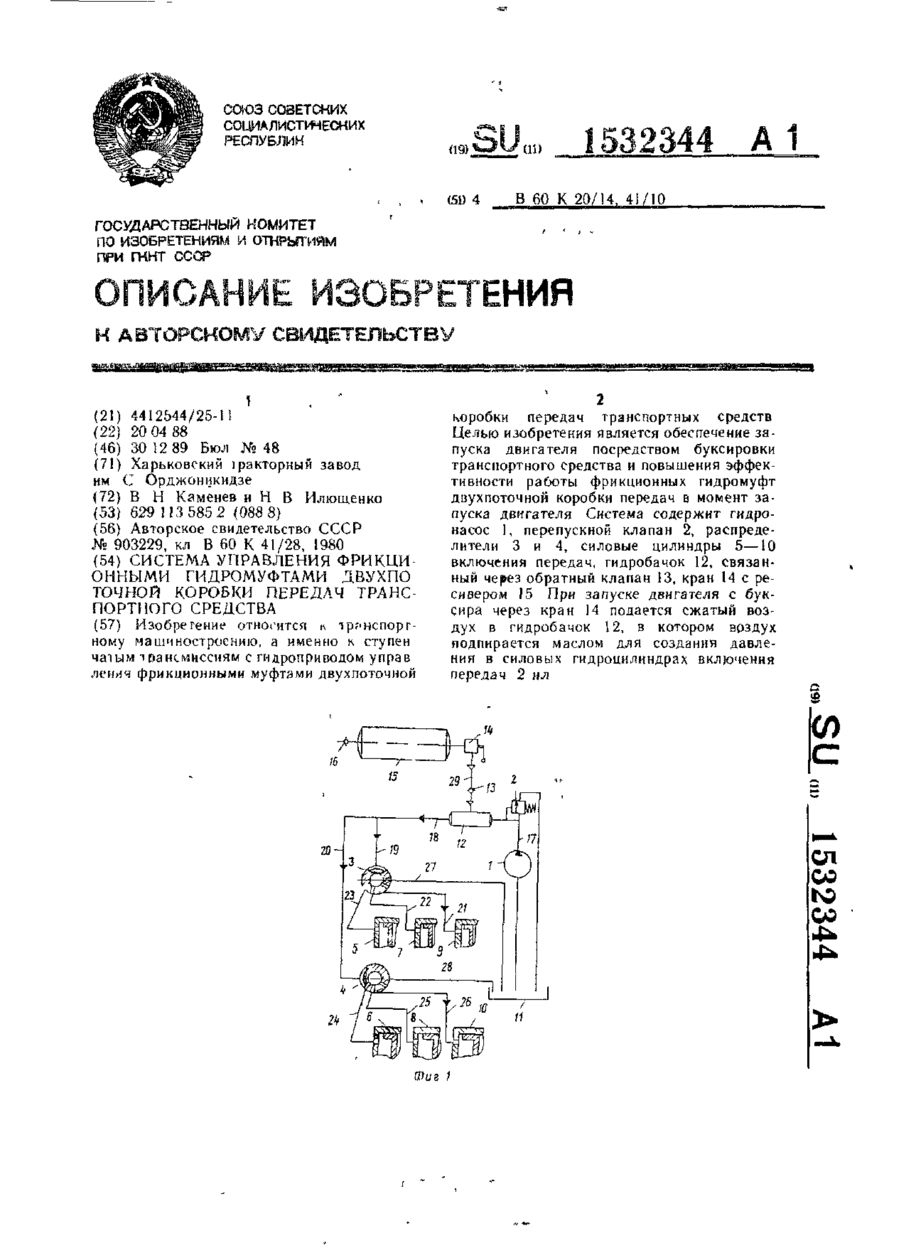
Система управлення фрикционными гидромуфтами двухпоточпой коробки передач транспортного средства, содержащая гидронасос, соединенный через перепускной клапан и гидрораспределители магистралями с силовыми гидроцилиндрами фрикционных гидромуфт коробки передач, обратный клапан, сообщенный через пневмораспределитель с ресивером пневмосистемы, отличающаяся тем, что, с целью обеспечения запуска двигателя путем буксировки транспортного средства...
Пристрій управління гальмом транспортного засобу
Номер патенту: 7070
Опубліковано: 31.03.1995
Автор: Каменев Василь Ніонілович
МПК: B60T 7/00
Мітки: гальмом, пристрій, засобу, транспортного, управління
Формула / Реферат:
(57) Устройство управления тормозом транспортного средства, содержащее рычаг педали, установленный на оси в кронштейне с возможностью поворота, зубчатый элемент, выполненный на рычаге педали, собачку фиксации рычага педали и механизм ее привода, снабженный рукояткой, отличающееся тем, что головка собачки выполнена на рукоятке механизма привода, при этом устройство снабжено пружиной с V-образными концами, охватывающей с двух сторон головку...
Привод управління коробкою передач транспортного засобу
Номер патенту: 6913
Опубліковано: 31.03.1995
Автор: Каменев Василь Ніонілович
МПК: B60K 20/04
Мітки: коробкою, передач, транспортного, засобу, привод, управління
Формула / Реферат:
(57) Привод управления коробкой передач транспортного средства, содержащий двуплечий рычаг со сферой, колонку, снабженную сферическим гнездом, сопряженным со сферой рычага и установленную в крышке коробки передач, нижнее плечо рычага установлено на кулисе, а верхнее - с уплотнением и колпачком и исполнительные рычаги, отличающийся тем, что колонка снабжена поводком - вилкой, охватывающим верхнее плечо рычага, при этом на указанном плече...
Попередній патент: Силова установка літального апарату
Наступний патент: Повітропідігрівник
Випадковий патент: Штангенциркуль адаптивний