Спосіб діагностики двигуна постійного струму при післяремонтних випробуваннях та пристрій для його здійснення
Номер патенту: 50993
Опубліковано: 15.11.2002
Автори: Барвінок Дмитро Володимирович, Васільєв Володимир Миколаєвич, Чирва Дмитро Леонідовіч, Хараджян Олександр Агасійович, Панченко Максим Вікторович, Родькін Дмитро Йосипович, Огарь Олександр Сергійович
Формула / Реферат
1. Спосіб діагностики двигунів постійного струму при післяремонтних випробуваннях, що включає підключення якоря двигуна до джерела регульованої напруги, збудження двигуна номінальним струмом, розгін двигуна до заданої швидкості обертання з контролем швидкості, струму та вібрації, який відрізняється тим, що виконують поділ втрат на втрати в міді і втрати в сталі, за рахунок того, що втрати в сталі визначають при незмінній швидкості обертання ротора та розраховують відповідно з залежністю ![]() ; процес діагностики здійснюють шляхом завдання швидкості при номінальному потоці, зміні струму збудження, вимірі струму якоря, напруги на якорі, струму збудження при чотирьох значеннях струму збудження (1,0; 0,75; 0,5; 0,3)Ізн шляхом зміни напруги на обмотці збудження, повторюють виміри при чотирьох заданих значеннях швидкості (1,0; 0,75; 0,5; 0,3)
; процес діагностики здійснюють шляхом завдання швидкості при номінальному потоці, зміні струму збудження, вимірі струму якоря, напруги на якорі, струму збудження при чотирьох значеннях струму збудження (1,0; 0,75; 0,5; 0,3)Ізн шляхом зміни напруги на обмотці збудження, повторюють виміри при чотирьох заданих значеннях швидкості (1,0; 0,75; 0,5; 0,3)![]() , складають системи рівнянь для кожного з заданих значень швидкості:
, складають системи рівнянь для кожного з заданих значень швидкості:
вирішують систему і визначають ![]() і коефіцієнти
і коефіцієнти ![]() ; визначають втрати у відповідності із залежністю
; визначають втрати у відповідності із залежністю
![]()
складають системи рівнянь для інших заданих значень швидкості і визначають залежність втрат у сталі в залежності від значень струму збудження, напруги живлення, визначають втрати потужності, що гріють, при заданому струмі якоря і швидкості обертання
![]()
де ![]() втрати в сталі при номінальному режимі роботи;
втрати в сталі при номінальному режимі роботи;
визначають робочу температуру двигуна при заданому навантаженні

де ![]() - температура при номінальному навантаженні;
- температура при номінальному навантаженні;
![]() - втрати при номінальному навантаженні;
- втрати при номінальному навантаженні;
порівнюють отримане значення з припустимим і роблять висновок про працездатність двигуна після ремонту; при необхідності після визначення ![]() обчислюють припустимий час роботи двигуна при заданих втратах
обчислюють припустимий час роботи двигуна при заданих втратах
![]()
де Тн - припустимий час роботи ізоляції при номінальному навантаженні з номінальними втратами;
![]() - абсолютна температура в номінальному режимі;
- абсолютна температура в номінальному режимі;
![]() - абсолютна температура з розрахунковими втратами
- абсолютна температура з розрахунковими втратами ![]() .
.
2. Пристрій діагностики двигунів постійного струму при післяремонтних випробуваннях містить двигун постійного струму, тиристорний перетворювач кола якоря з комутуючим апаратом на вході, тиристорний перетворювач кола збудження з комутуючим апаратом на вході, первинними датчиками миттєвих значень напруги і струму якоря та збудження на вході двигуна постійного струму, обчислювальний блок для визначення параметрів двигуна, який відрізняється тим, що додатково містить цифрову систему керування тиристорними перетворювачами, блок датчиків струму та напруги якірного кола та кола збудження з цифровим незалежним регулюванням коефіцієнта передачі датчиків, обчислювальний пристрій нижнього рівня з чотирма аналоговими входами, двома цифровими входами-виходами, блок захисту з цифровим завданням рівнів уставок захисту з чотирма аналоговими входами і двома цифровими виходами та двома цифровими входами і одним цифровим входом-виходом, аналого-цифровий перетворювач із чотирма аналоговими входами й одним цифровим входом-виходом, причому п'ятий, шостий, сьомий та восьмий аналогові виходи блока датчиків зв'язані з першим, другим, третім та четвертим входами обчислювального блока нижнього рівня, четвертим, п'ятим, шостим та сьомим аналоговими входами блока захисту, першим, другим, третім та четвертим входами аналого-цифрового перетворювача, дев'ятий цифровий вхід блока датчиків зв'язаний з п'ятим цифровим входом-виходом обчислювального блока нижнього рівня, виходи первинних датчиків струму та напруги зв'язані з першим, другим, третім та четвертим аналоговими входами блока датчиків; перший цифровий вихід блока захисту зв'язаний з котушкою, що відключає, комутуючого апарата в колі змінного струму якірного тиристорного перетворювача, другий цифровий вихід блока захисту зв'язаний з котушкою, що відключає, комутуючого апарата в колі змінного струму тиристорного перетворювача збудження, третій вхід-вихід блока захисту зв'язаний з п'ятим входом-виходом обчислювального блока нижнього рівня і сьомим входом цифрової системи керування тиристорним перетворювачем якірного кола та сьомим входом цифрової системи керування тиристорним перетворювачем кола збудження, сигнал із блока-контакта комутуючого апарата в колі змінного струму якірного тиристорного перетворювача зв'язаний з восьмим цифровим входом блока захисту, сигнал із блока-контакта комутуючого апарата в колі змінного струму тиристорного перетворювача збудження зв'язаний з дев'ятим цифровим входом блока захисту, другий цифровий вхід-вихід обчислювального блока верхнього рівня зв'язаний із шостим цифровим входом-виходом обчислювального блока нижнього рівня, п'ятий цифровий вхід-вихід блока аналогового цифрового перетворення зв'язаний із першим цифровим входом-виходом обчислювального блока верхнього рівня.
Текст
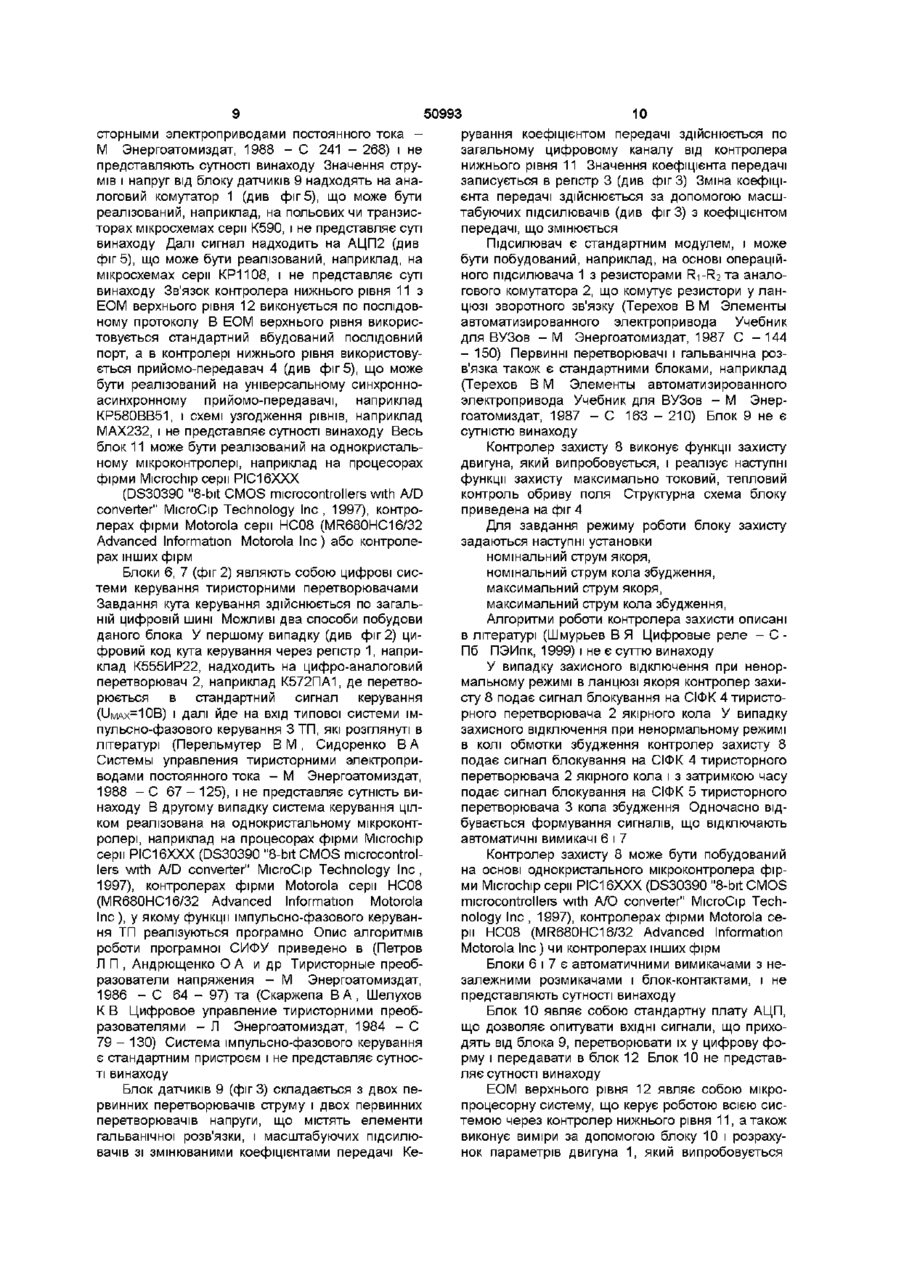
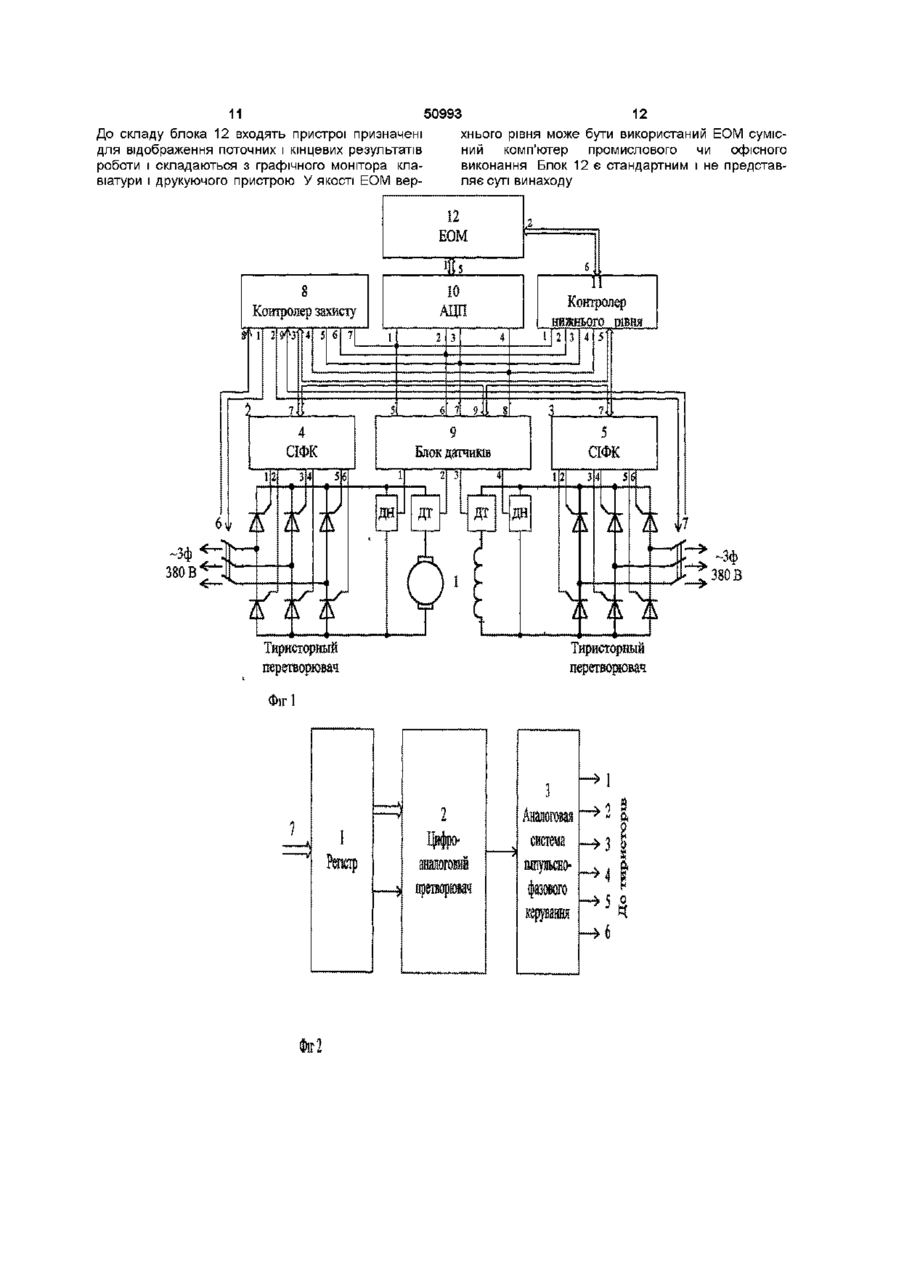
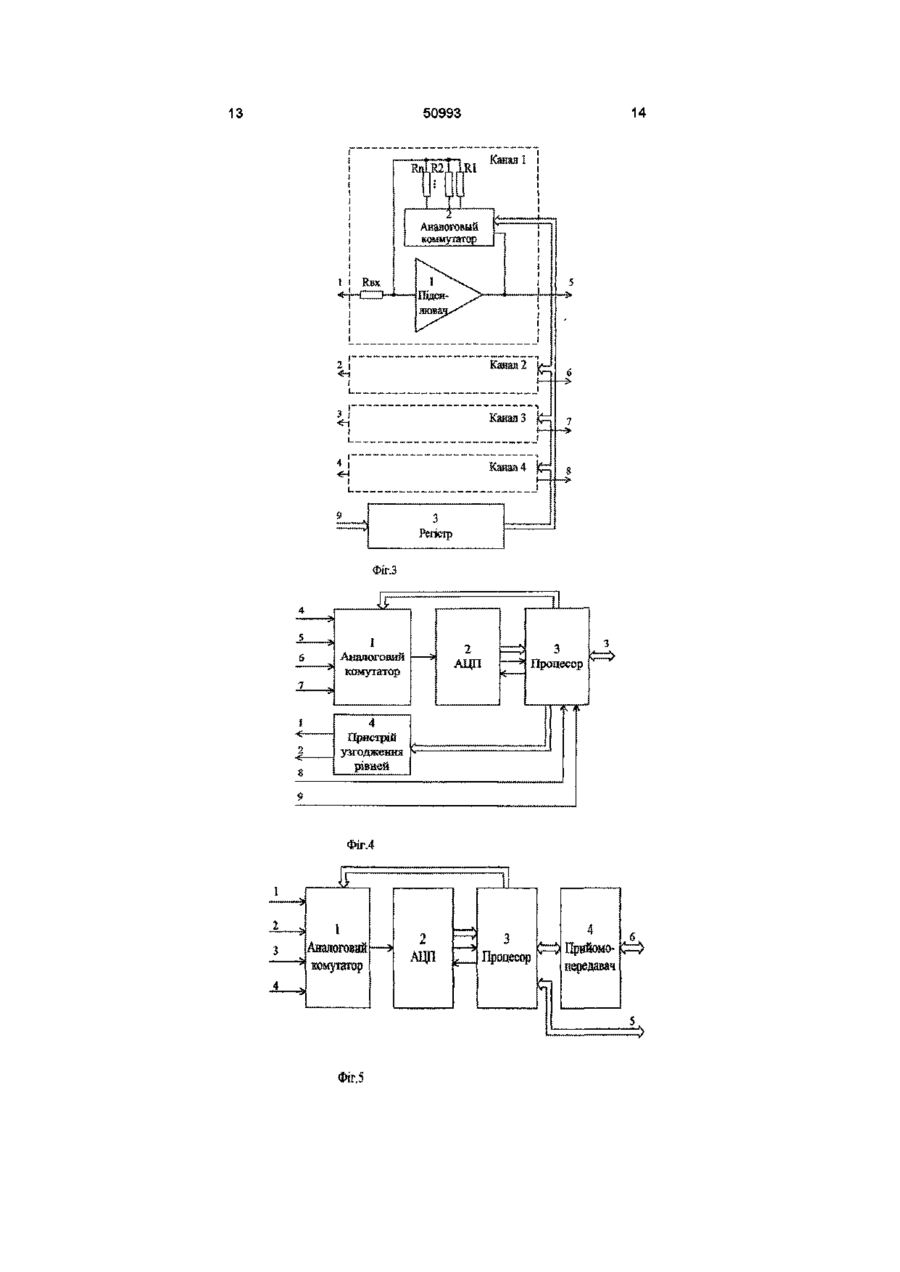
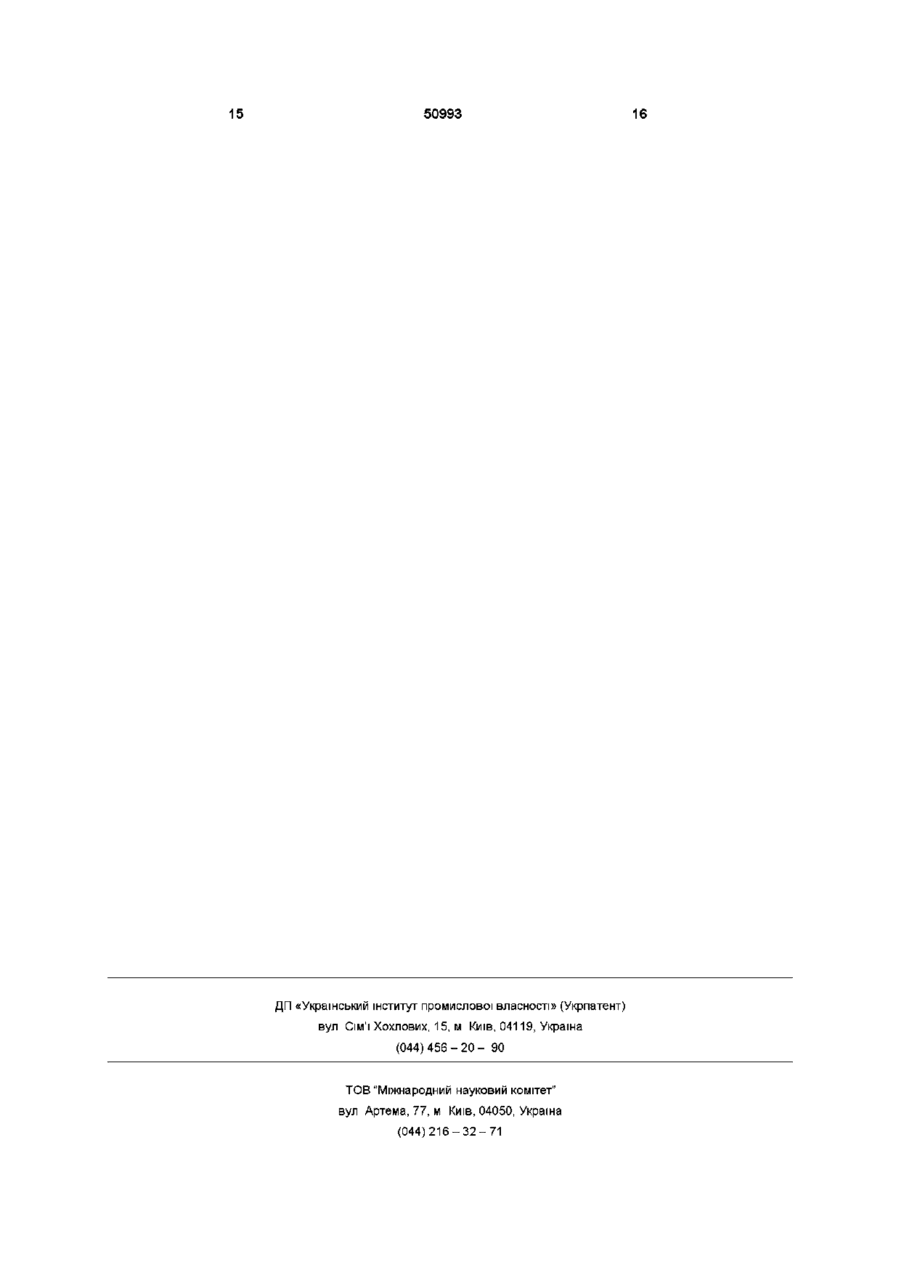
1 Спосіб діагностики двигунів постійного струму при післяремонтних випробуваннях, що включає підключення якоря двигуна до джерела регульованої напруги, збудження двигуна номінальним струмом, розгін двигуна до заданої швидкості обертання з контролем швидкості, струму та вібрації, який відрізняється тим, що виконують поділ втрат на втрати в МІДІ І втрати в сталі, за рахунок того, що втрати в сталі визначають при незмінній швидкості обертання ротора та розраховують ВІДПОВІДНО З залежністю АРст = 7 2 + ІзияС-| +l 3 C2 , процес діагностики здійснюють шляхом завдання швидкості при номінальному потоці, ЗМІНІ струму збудження, вимірі струму якоря, напруги на якорі, струму збудження при чотирьох значеннях струму збудження (1,0, 0,75, 0,5, 0,3)Ізн шляхом зміни напруги на обмотці збудження, повторюють виміри при чотирьох заданих значеннях швидкості (1,0, 0,75, 0,5, 0,3) сон , складають системи рівнянь для кожного з заданих значень швидкості 9 Uo — Li R ol l i e С2а)1, 9 — l^ R a e вирішують систему і визначають ЛРмеХюі і коефіцієнти Со ю і,Сі ю і,С2 Ю і, визначають втрати у ВІДПОВІДНОСТІ ІЗ залежністю AP 7 U C +LUC 7 +UС складають системи рівнянь для інших заданих значень швидкості і визначають залежність втрат у сталі в залежності від значень струму збудження, напруги живлення, визначають втрати потужності, що гріють, при заданому струмі якоря і швидкості обертання 1 2 А Р гр =| я R *Z +АРспіюн' де АР сгт1ю - втрати в сталі при номінальному режимі роботи, визначають робочу температуру двигуна при заданому навантаженні х н = х н ДРггр АРгр де х н - температура при номінальному навантаженні, ДР г р - втрати при номінальному навантаженні, порівнюють отримане значення з припустимим і роблять висновок про працездатність двигуна після ремонту, при необхідності після визначення Хн обчислюють припустимий час роботи двигуна при заданих втратах -г1 _ т р -(і/®„-і/®„) де Тн - припустимий час роботи ізоляції при номінальному навантаженні з номінальними втратами, © н - абсолютна температура в номінальному режимі, © н - абсолютна температура з розрахунковими втратами ДРГ 2 Пристрій діагностики двигунів постійного струму при післяремонтних випробуваннях містить двигун постійного струму, тиристорний перетворювач кола якоря з комутуючим апаратом на вході, тиристорний перетворювач кола збудження з комутуючим апаратом на вході, первинними датчиками миттєвих значень напруги і струму якоря та збудження на вході двигуна постійного струму, обчислювальний блок для визначення параметрів двигуна, який відрізняється тим, що додатково містить цифрову систему керування тиристорними CO О> О ю 50993 перетворювачами, блок датчиків струму та напруги якірного кола та кола збудження з цифровим незалежним регулюванням коефіцієнта передачі датчиків, обчислювальний пристрій нижнього рівня з чотирма аналоговими входами, двома цифровими входами-виходами, блок захисту з цифровим завданням рівнів уставок захисту з чотирма аналоговими входами і двома цифровими виходами та двома цифровими входами і одним цифровим входом-виходом, аналого-цифровий перетворювач із чотирма аналоговими входами й одним цифровим входом-виходом, причому п'ятий, шостий, сьомий та восьмий аналогові виходи блока датчиків зв'язані з першим, другим, третім та четвертим входами обчислювального блока нижнього рівня, четвертим, п'ятим, шостим та сьомим аналоговими входами блока захисту, першим, другим, третім та четвертим входами аналого-цифрового перетворювача, дев'ятий цифровий вхід блока датчиків зв'язаний з п'ятим цифровим входом-виходом обчислювального блока нижнього рівня, виходи первинних датчиків струму та напруги зв'язані з першим, другим, третім та четвертим аналоговими входами блока датчиків, перший цифровий вихід блока захисту зв'язаний з котушкою, що відключає, комутуючого апарата в колі змінного струму якірного тиристорного перетворювача, другий цифровий вихід блока захисту зв'язаний з котушкою, що відключає, комутуючого апарата в колі змінного струму тиристорного перетворювача збудження, третій ВХІД-ВИХІД блока захисту зв'язаний з п'ятим входом-виходом обчислювального блока нижнього рівня і сьомим входом цифрової системи керування тиристорним перетворювачем якірного кола та сьомим входом цифрової системи керування тиристорним перетворювачем кола збудження, сигнал із блока-контакта комутуючого апарата в колі змінного струму якірного тиристорного перетворювача зв'язаний з восьмим цифровим входом блока захисту, сигнал із блока-контакта комутуючого апарата в колі змінного струму тиристорного перетворювача збудження зв'язаний з дев'ятим цифровим входом блока захисту, другий цифровий ВХІД-ВИХІД обчислювального блока верхнього рівня зв'язаний із шостим цифровим входом-виходом обчислювального блока нижнього рівня, п'ятий цифровий ВХІД-ВИХІД блока аналогового цифрового перетворення зв'язаний із першим цифровим входом-виходом обчислювального блока верхнього рівня Винахід відноситься до електромеханіки, а саме до систем випробування та діагностики електричних двигуна постійного струму, і призначений для визначення втрат у сталі двигуна постійного струму, його магнітного потоку та післяремонтної потужності Відомо, ЩО ПІСЛЯ ремонту електричної машини внаслідок передремонтних та ремонтних технологічних операції (видалення обмотки, встановлення кріпильних клинів і т д ) відбувається зміна магнітних властивостей сталі Це приводить до того, що теплова напруженість у зубцях і, особливо, у їхній верхній частині істотно зростає (ІНОДІ втрати в сталі зубців збільшуються на ЗО - 150%), що приводить до зниження надійності електричної машини через перегрів обмотки 3 цієї причини необхідна зміна навантаження на валу двигуна до меж, що забезпечують нормальну робочу температуру активних частин Відомий спосіб визначення моменту магнітних утрат, що полягає в тому, що вимірюють момент, який прикладається до вала двигуна під час роботи його при відсутності струму збудження і при його наявності (Иванов-Смоленский А В Электрические машины - М Энергия, 1980 - 930с) Різниця цих моментів дає значення моменту, еквівалентного втратам при заданій швидкості і струмі збудження Недоліком технічного рішення є те, що зафіксувати зміну моменту складно через його малу величину (до декількох ВІДСОТКІВ ВІД номінального), крім того, необхідне з'єднання вала випробовуваного двигуна з іншою регульованою машиною Це ускладнює схему й ускладнює застосування цього методу випробування чає датчики напруги, струму та швидкості обертання Коефіцієнт потоку визначається за результатами виміру напруги і швидкості обертання Знання потоку не означає знання втрат від цього потоку Тому цей пристрій неможливо застосувати для визначення працездатності двигуна по фактору нагрівання активних частин (А С СССР №1376753 кл G01R 31/ЗА, Устройство определения магнитного потока возбуждения электродвигателей постоянного тока) Аналізований пристрій приймається як прототип Задачею винаходу є підвищення точності випробування електродвигуна за рахунок поділу втрат, що гріють обмотку, на складові втрати в МІДІ й втрати в сталі, порівняння їх з розрахунковими паспортними, визначення припустимого механічного навантаження Теоретичні передумови для пропонованого способу полягають у наступному Втрати в сталі складаються з двох складових втрати на гістерезис та втрати на вихрові струми У літературі (Иванов-Смоленский А В Электрические машины - М Энергия, 1980 - 930с) приведені апроксимуючі залежності для визначення втрат за відомими характеристиками сталі (питомі втрати на гістерезис і вихрові струми, масу пакета сталі, тощо) втрати на гістерезис р=п/ а втрати на вихрові струми р=а/ 2 В 2 де п - питомі втрати на гістерезис в одиниці маси, а - питомі втрати на вихрові струми в одиниці маси, а - показник, що залежить від марки сталі, / - частота перемагнічування, В - індукція магнітного поля Відомий пристрій для визначення потоку збудження двигуна постійного струму Пристрій вклю 5 50993 Дані залежності не відбивають повною мірою взаємозв'язок магнітних втрат та факторів, які впливають на втрати Найбільше точно взаємозв'язок факторів відображено у загальному випадку втрати на гістерезис - APv(t) = — (B(t)H(t))SI , втрати на вихрові струми p де S - площа, на якій діє індукція В, Н - сила, що намагнічує, Е - ЕРС наведена в контурі, І - середня довжина силової магнітної лінії, р - опір аркушів сталі При живленні обмотки збудження пульсуючим струмом сила, що намагнічує, має вид H(t)wl 3 = ( 1 + к п з sm(co3t)) , де w - КІЛЬКІСТЬ ВИТКІВ обмотки, Із середнє значення струму збудження, к п з - коефіцієнт пульсації струму збудження, ш 3 частота пульсації струму збудження У цьому випадку магнітну індукцію можна представити у вигляді B(t)=|JoMr(H(t))H(t) або для лінійної ділянки кривої намагнічування B(t)=|Jo M r H(t) А з урахуванням зміни струму збудження L(l + ksm(G>J)) Втрати в роторі на вихрові струми від обертання ротора при незмінній швидкості обертання ротора w=const визначаються в такий спосіб ЭДС контуру вихрових струмів де Boi^BsftJsinfajt) - індукція в елементі ротора при його обертанні Е=Щ -j^ Введемо позначення К-\ = - ( k B S | i 0 | i r w ) 2 Тоді МИТТЄВІ значення втрат на вихрові струми дорівнюють 1 z х (і + km sm(u>31))+ a? cos (6>l)(l + k^ ^п(п>3 t)f) Середнє значення потужності втрат на вихрові струми 50993 U Ч\ Вирішують систему і визначають ДРМЕХШІ І коефіцієнти Co ші, Сі ші, Сг ші, визначають втрати ВІДПОВІДНО до залежності (3) Складають системи рівнянь для інших заданих значень швидкості і визначають залежність втрат у сталі в залежності від значень струму збудження, напруги живлення Визначають втрати потужності, що гріють, при заданому струмі якоря і швидкості обертання Визначають робочу температуру двигуна при заданому навантаженні т =т де хн -температура при номінальному навантаженні, ДРГР - втрати при номінальному навантаженні, порівнюють отримане значення з припустимим, і роблять висновок про працездатність двигуна після ремонту При необхідності після визначення тн обчислюють припустимий час роботи двигуна при заданих втратах j_ ©„ "еі Тн=Тне де Тн припустимий час роботи ізоляції при номінальному навантаженні з номінальним втратами, ©н - абсолютна температура в номінальному режимі, ®'н - абсолютна температура з розрахунковими втратами ДРГ' Спосіб реалізується за допомогою пристрою, що складається з керованого тиристорного перетворювача якірного кола, керованого тиристорного перетворювача кола збудження, датчиків струму та напруги якірного кола, датчиків струму та напруги кола збудження, системи захисту з можливістю програмної зміни уставок на основі мікроконтролера, контролера керування нижнього рівня й ЕОМ верхнього рівня Заявлений пристрій пояснюється наступним кресленням, де на фіг 1 - блок-схема пристрою для діагностики двигунів постійного струму, фіг 2 - блок-схема системи керування тиристорним перетворювачем (блоки 4 і 5), фіг 3 - блок-схема блоку датчиків (блок 9), фіг 4 - блок-схема контролера захисту (блок 8), фіг 5 - блок-схема контролера нижнього рівня (блок 11) Пристрій містить наступні блоки блок 1 - двигун, який випробовується, 8 блок 2 - тиристорний перетворювач якірного кола, блок 3 -тиристорний перетворювач кола збудження, блок 4 - система імпульсно-фазового керування (СІФК) перетворювач якірного ланцюга, блок 5 - СІФК перетворювач ланцюга збудження, блок 6 - автоматичний вимикач з незалежним розмикачем, блок 7 - автоматичний вимикач з незалежним розмикачем, блок 8 - контролер захисту, блок 9 - блок датчиків, блок 10 - аналогово-цифровий перетворювач, блок 11 - контролер керування нижнього рівня, блок 12 - ЕОМ верхнього рівня Суть роботи пристрою полягає в наступному Якір двигуна 1 підключається до мережі через керований тиристорний перетворювач 2 і через автоматичний вимикач з незалежним розмикачем 6 У ланцюзі постійного струму перетворювача 2 встановлені датчики 9 миттєвих значень струму і напруги якоря Обмотка збудження двигуна 1 приєднується до мережі через керований тиристорний перетворювач 3 і через автоматичний вимикач з незалежним розмикачем 7 У ланцюзі постійного струму перетворювача 3 встановлені датчики миттєвих значень струму і напруги обмотки збудження Виходи датчиків зв'язані з блоком захисту 8, з контролером нижнього рівня 11 і блоком аналогоцифрового перетворення 10 ЕОМ верхнього рівня 12 формує керуючі команди для контролера нижнього рівня 11 і виконує математичні розрахунки в ході діагностики, а також забезпечує введення і відображення інформації оператору Для перетворення аналогового сигналу від блока датчиків 9 у цифрову форму використовується блок аналогоцифрового перетворення 10 Для керування тиристорами перетворювача кола якоря використовується система імпульсно-фазового керування 4 і система Імпульсно-фазового керування (СІФК) 5 для керування тиристорами перетворювача кола обмотки збудження Контролер нижнього рівня 11 являє собою пристрій на основі м ікро контролера Він приймає команди від ЕОМ верхнього рівня і на основі цих команд виконує наступні дії програмує контролер захисту 8, керує системами імпульсно-фазового керування 4, 5, програмує коефіцієнти перетворення датчиків 9, виконує аналого-цифрове перетворення сигналів струму і напруги для розрахунку зворотних зв'язків, розраховує значення зворотних зв'язків ВІДПОВІДНО до режиму роботи Блок 11 керує блоками 4, 5, 8, 9 через загальну цифрову шину Контролер нижнього рівня 11 (фіг 5) програмно реалізує регулятори струму, швидкості і потоку випробовуваної машини Програмні алгоритми регуляторів описані в літературі (Перельмутер В М , Сидоренко В А Системы управления тири 50993 10 рування коефіцієнтом передачі здійснюється по сторными электроприводами постоянного тока загальному цифровому каналу від контролера М Энергоатомиздат, 1988 - С 241 - 268) і не нижнього рівня 11 Значення коефіцієнта передачі представляють сутності винаходу Значення струзаписується в регістр 3 (див фіг 3) Зміна коефіцімів і напруг від блоку датчиків 9 надходять на анаєнта передачі здійснюється за допомогою масшлоговий комутатор 1 (див фіг 5), що може бути табуючих підсилювачів (див фігЗ) з коефіцієнтом реалізований, наприклад, на польових чи транзиспередачі, що змінюється торах мікросхемах серп К590, і не представляє суті винаходу Далі сигнал надходить на АЦП2 (див Підсилювач є стандартним модулем, і може фіг 5), що може бути реалізований, наприклад, на бути побудований, наприклад, на основі операціймікросхемах серп КР1108, і не представляє суті ного підсилювача 1 з резисторами R1-R2 та аналовинаходу Зв'язок контролера нижнього рівня 11 з гового комутатора 2, що комутує резистори у ланЕОМ верхнього рівня 12 виконується по послідовцюзі зворотного зв'язку (Терехов В М Элементы ному протоколу В ЕОМ верхнього рівня викорисавтоматизированного электропривода Учебник товується стандартний вбудований послідовний для ВУЗов - М Энергоатомиздат, 1987 С - 1 4 4 порт, а в контролері нижнього рівня використову- 150) Первинні перетворювачі і гальванічна розється прийомо-передавач 4 (див фіг 5), що може в'язка також є стандартними блоками, наприклад бути реалізований на універсальному синхронно(Терехов В М Элементы автоматизированного асинхронному прийомо-передавачі, наприклад электропривода Учебник для ВУЗов - М ЭнерКР580ВВ51, і схемі узгодження рівнів, наприклад гоатомиздат, 1987 - С 163 - 210) Блок 9 не є МАХ232, і не представляє сутності винаходу Весь сутністю винаходу блок 11 може бути реалізований на однокристальКонтролер захисту 8 виконує функції захисту ному мікроконтролері, наприклад на процесорах двигуна, який випробовується, і реалізує наступні фірми Microchip серії РІС16ХХХ функції захисту максимально токовий, тепловий контроль обриву поля Структурна схема блоку (DS30390 "8-bit CMOS microcontrollers with A/D приведена на фіг 4 converter" MicroCip Technology Inc , 1997), контролерах фірми Motorola серп НС08 (MR680HC16/32 Для завдання режиму роботи блоку захисту Advanced Information Motorola Inc) або контролезадаються наступні установки рах інших фірм номінальний струм якоря, Блоки 6, 7 (фіг 2) являють собою цифрові сисномінальний струм кола збудження, теми керування тиристорними перетворювачами максимальний струм якоря, Завдання кута керування здійснюється по загальмаксимальний струм кола збудження, ній цифровій шині Можливі два способи побудови Алгоритми роботи контролера захисти описані даного блока У першому випадку (див фіг 2) цив літературі (Шмурьев В Я Цифровые реле - С фровий код кута керування через регістр 1, наприПб ПЭИпк, 1999) і не є суттю винаходу клад К555ИР22, надходить на цифро-аналоговий У випадку захисного відключення при ненорперетворювач 2, наприклад К572ПА1, де перетвомальному режимі в ланцюзі якоря контролер захирюється в стандартний сигнал керування сту 8 подає сигнал блокування на СІФК 4 тиристо(UMAX-ЮВ) і далі йде на вхід типової системи імрного перетворювача 2 якірного кола У випадку пульсно-фазового керування З ТП, які розглянуті в захисного відключення при ненормальному режимі літературі (Перельмутер В М , Сидоренко В А в колі обмотки збудження контролер захисту 8 Системы управления тиристорними электроприподає сигнал блокування на СІФК 4 тиристорного водами постоянного тока - М Энергоатомиздат, перетворювача 2 якірного кола і з затримкою часу 1988 - С 67 - 125), і не представляє сутність виподає сигнал блокування на СІФК 5 тиристорного находу В другому випадку система керування цілперетворювача 3 кола збудження Одночасно відком реалізована на однокристальному мікроконтбувається формування сигналів, що відключають ролері, наприклад на процесорах фірми Microchip автоматичні вимикачі 6 і 7 серії РІС16ХХХ (DS30390 "8-bit CMOS microcontrolКонтролер захисту 8 може бути побудований lers with A/D converter" MicroCip Technology Inc , на основі однокристального мікроконтролера фір1997), контролерах фірми Motorola серп НС08 ми Microchip серії РІС16ХХХ (DS30390 "8-bit CMOS (MR680HC16/32 Advanced Information Motorola microcontrollers with А/О converter" MicroCip TechInc ), у якому функції імпульсно-фазового керуванnology Inc , 1997), контролерах фірми Motorola сеня ТП реалізуються програмно Опис алгоритмів рп HC08 (MR680HC16/32 Advanced Information роботи програмної СИФУ приведено в (Петров Motorola Inc ) чи контролерах інших фірм Л П , Андрющенко О А и др Тиристорные преобБлоки 6 і 7 є автоматичними вимикачами з неразователи напряжения - М Энергоатомиздат, залежними розмикачами і блок-контактами, і не 1986 - С 64 - 97) та (Скаржепа В А , Шелухов представляють сутності винаходу К В Цифровое управление тиристорними преобБлок 10 являє собою стандартну плату АЦП, разователями - Л Энергоатомиздат, 1984 - С що дозволяє опитувати ВХІДНІ сигнали, що прихо79 - 130) Система імпульсно-фазового керування дять від блока 9, перетворювати їх у цифрову фоє стандартним пристроєм і не представляє сутносрму і передавати в блок 12 Блок 10 не представті винаходу ляє сутності винаходу Блок датчиків 9 (фіг 3) складається з двох пеЕОМ верхнього рівня 12 являє собою мікрорвинних перетворювачів струму і двох первинних процесорну систему, що керує роботою всією сисперетворювачів напруги, що містять елементи темою через контролер нижнього рівня 11, а також гальванічної розв'язки, і масштабуючих підсилювиконує виміри за допомогою блоку 10 і розрахувачів зі змінюваними коефіцієнтами передачі Кенок параметрів двигуна 1, який випробовується 11 50993 12 До складу блока 12 входять пристрої призначені хнього рівня може бути використаний ЕОМ сумісдля відображення поточних і кінцевих результатів ний комп'ютер промислового чи офісного роботи і складаються з графічного монітора клавиконання Блок 12 є стандартним і не представвіатури і друкуючого пристрою У якості ЕОМ верляє суті винаходу Контролер захисту 10 АЦП 11 Контролер нижнього рівня 380 В 380 В Тиристорний перетворювач Фіг 1 ФГ І2 Тиристорний перетворювач 13 14 50993 ФІг.3 Аналоговий комутатор 4 Прнсїрш узгодження рівней Фіг.4 Фіг,5 2 АЦП Процесор 15 50993 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 16
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for diagnostics of a motor in testing after repair
Автори англійськоюRodkin Dmytro Yosypovych, Barvinok Dmytro Volodymyrovych
Назва патенту російськоюСпособ диагностики электродвигателя постоянного тока при испытаниях после ремонта и устройство для осуществления способа
Автори російськоюРодькин Дмитрий Иосифович, Барвинок Дмитрий Владимирович
МПК / Мітки
МПК: G01R 31/34, G05B 23/02
Мітки: постійного, двигуна, післяремонтних, струму, пристрій, спосіб, діагностики, здійснення, випробуваннях
Код посилання
<a href="https://ua.patents.su/8-50993-sposib-diagnostiki-dviguna-postijjnogo-strumu-pri-pislyaremontnikh-viprobuvannyakh-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб діагностики двигуна постійного струму при післяремонтних випробуваннях та пристрій для його здійснення</a>
Спосіб динамічного навантаження двигуна постійного струму незалежного збудження та пристрій для його здійснення
Номер патенту: 40067
Опубліковано: 16.07.2001
Автори: Величко Тетяна Володимирівна, Луговий Анатолій Васильович, Бялобржевський Олексій Володимирович, Вошун Олексій Миколайович, Родькін Дмитро Йосипович, Пасмурских Олександр Олексійович, Добрецов Володимир Валентинович
МПК: G01R 31/34
Мітки: пристрій, незалежного, струму, збудження, спосіб, динамічного, двигуна, здійснення, постійного, навантаження
Формула / Реферат:
1. Спосіб динамічного навантаження двигуна постійного струму незалежного збудження, який полягає в тому, що якір двигуна живиться від регульованого джерела через датчик струму якоря, обмотка збудження живиться від регульованого джерела через датчик струму збудження, контролюються параметри режиму навантаження, струм якоря, напруга якоря, швидкість обертання якоря, який відрізняється тим, що задають залежності струму якоря та кутової швидкості...
Спосіб гальмування двигуна постійного струму і пристрій для його реалізації
Номер патенту: 47111
Опубліковано: 17.06.2002
Автор: Дрючін Олександр Олексійович
МПК: H02P 3/06
Мітки: пристрій, постійного, реалізації, струму, гальмування, двигуна, спосіб
Формула / Реферат:
1. Спосіб гальмування двигуна постійного струму, при якому величину струму гальмування встановлюють зміною часу замикання якоря двигуна, а частину енергії двигуна передають до мережі, який відрізняється тим, що на інтервалах між замиканнями до якоря підключають реактивний накопичувач, в якому здійснюють попереднє накопичення енергії двигуна і вихідну напругу якого порівнюють з верхньою і нижньою межами і рівнем мережі, при перевищенні рівня...
Спосіб діагностики асинхронного двигуна та пристрій для його здійснення
Номер патенту: 50115
Опубліковано: 15.10.2002
Автори: Родькін Дмитро Йосипович, Чорний Олексій Петрович, Головко Олег Степанович, Волощенко Олександр Михайлович, Лашко Юрій Вікторович, Гладир Андрій Іванович
МПК: G01R 31/34
Мітки: діагностики, спосіб, двигуна, асинхронного, здійснення, пристрій
Формула / Реферат:
1. Спосіб діагностики асинхронного двигуна, який полягає в підключенні асинхронного двигуна через тиристорний регулятор до джерела промислової частоти та вимірюванні миттєвих значень напруги та струму статорного ланцюга, який відрізняється тим, що за даними вимірів розраховують миттєві значення електромагнітного моменту АД, за допомогою обчислювального блока також розраховують значення електромагнітного моменту АД за паспортними даними,...
Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення
Номер патенту: 36060
Опубліковано: 16.04.2001
Автори: Вошун Олексій Миколайович, Луговой Анатолій Васильович, Сисюк Геннадій Юрійович, Чорний Олексій Петрович, Пасмурских Олександр Олексійович, Долженко Віктор Володимирович, Добрецов Володимир Валентинович, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: двигуна, здійснення, спосіб, пристрій, ротором, короткозамкненим, параметрів, асинхронного, діагностики
Формула / Реферат:
1. Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, в відключенні статорних обмоток від мережі в момент переходу струму через нуль, вимірюванні залишкової напруги після відключення, який відрізняється тим, що в момент відключення вимірюють стрибок напруги на затискачах статора...
Спосіб визначення параметрів системи управління з двигуном постійного струму та пристрій для його здійснення
Номер патенту: 20167
Опубліковано: 25.12.1997
Автор: Аркадьєв Віктор Юрьєвич
МПК: G01R 31/34, H02K 15/00, G06G 7/00
Мітки: постійного, спосіб, пристрій, визначення, системі, здійснення, управління, двигуном, параметрів, струму
Формула / Реферат:
1. Способ определения параметров систем управления с двигателем постоянного тока, включающий измерение тока і и напряжения U якоря двигателя, скачкообразное изменение задающего воздействия от блока задающих сигналов, отличающийся тем, что используют активно-индуктивную (RL) нагрузку, а действие внутренней связи по электродвижущей силе (ЭДС) двигателя постоянного тока реализуют на основе преобразования контура регулирования тока и с помощью...
Попередній патент: Конвертор з боковими фурмами
Наступний патент: Тигель для плавки міді
Випадковий патент: Освітлювальний пристрій