Адаптивна по дальності антенна решітка
Номер патенту: 55238
Опубліковано: 17.03.2003
Автори: Копитко Ігор Йосипович, Гусєв Юрій Германович, Саричев Юрій Олексійович, Федоров Володимир Іванович, Бадеха Дмитро Вікторович
Формула / Реферат
1. Адаптивна по дальності антенна решітка, що містить три рознесені у просторі й однаково орієнтовані елементи в трьох прийомних каналах, три фільтри, три перетворювачі частоти, три блоки вагових коефіцієнтів, суматор, детектор, процесор, причому виходи елементів решітки кожного з трьох каналів підключені до входів відповідних фільтрів, виходи яких з'єднані з відповідними входами перетворювачів частоти, виходи перетворювачів частоти першого і третього каналів з'єднані з входами першого і третього блоків вагових коефіцієнтів, відповідно, вихід другого блока вагових коефіцієнтів з'єднаний із першим входом суматора, вихід якого є входом детектора і виходом антенної решітки, перший вихід процесора є другим входом першого блока вагових коефіцієнтів, а другий його вихід є другим входом другого блока вагових коефіцієнтів, що відрізняється тим, що в неї додатково введені препроцесор, другий суматор, комутатор і дільник потужності, причому вихід третього блока вагових коефіцієнтів через перший вихід дільника потужності з'єднаний із першим входом другого суматора, другий вихід дільника потужності з'єднаний із третім входом препроцесора, перший вхід якого є виходом першого блока вагових коефіцієнтів, другий вхід є виходом другого перетворювача частоти, четвертий вхід є виходом детектора через другий перемикач комутатора, перший і другий виходи препроцесора з'єднані відповідно з першим входом другого блока вагових коефіцієнтів і з другим входом другого суматора, вихід другого суматора з'єднаний із другим входом першого суматора, вихід детектора є входом процесора через перший перемикач комутатора.
2. Адаптивна по дальності антенна решітка за п. 1, який відрізняється тим, що препроцесор містить у собі пристрій фазового автопідстроювання, що складається із фазообертача, дільника потужності, фазометра, аналого-цифрового перетворювача, пристрою віднімання, буферного пристрою і комутатора, при цьому вхід фазообертача пристрою фазового автопідстроювання одночасно є першим входом препроцесора, а його вихід через дільник потужності з'єднаний із першим входом фазометра, другий вихід дільника потужності є другим виходом препроцесора, другий вхід фазометра являється третім входом препроцесора, вихід фазометра через аналого-цифровий перетворювач з'єднаний із входом від'ємника пристрою віднімання, а вхід зменшуваного пристрою вирахування з'єднаний із виходом буферного пристрою, вихід пристрою віднімання підключений до інформаційного входу буферного пристрою і, паралельно, через комутатор, до керуючого входу фазообертача, на синхронізуючі входи аналого-цифрового перетворювача і буферного пристрою надходять синхронізуючі імпульси, а також пристрій адаптації по дальності, що містить послідовно з'єднані датчик випадкових чисел, три пристрої перемножування, аналого-цифровий перетворювач, буферний пристрій, суматор і фазообертач, при цьому другі входи пристроїв перемножування з'єднані, відповідно, з клемою константи А, через аналого-цифровий перетворювач із четвертим входом препроцесора і з клемою константи А, другий вхід суматора з'єднаний із виходом буферного пристрою, а вихід суматора з'єднаний із другим входом буферного пристрою і керуючого входу цифрового фазообертача, входом і виходом якого є другий вхід і перший вихід препроцесора, на синхровходи датчика випадкових чисел і буферного пристрою подаються синхронізуючі імпульси.
3. Адаптивна по дальності антенна решітка за п. 1, яка відрізняється тим, що відстані між її елементами в процесі роботи змінюються однаково в обох парах.
Текст
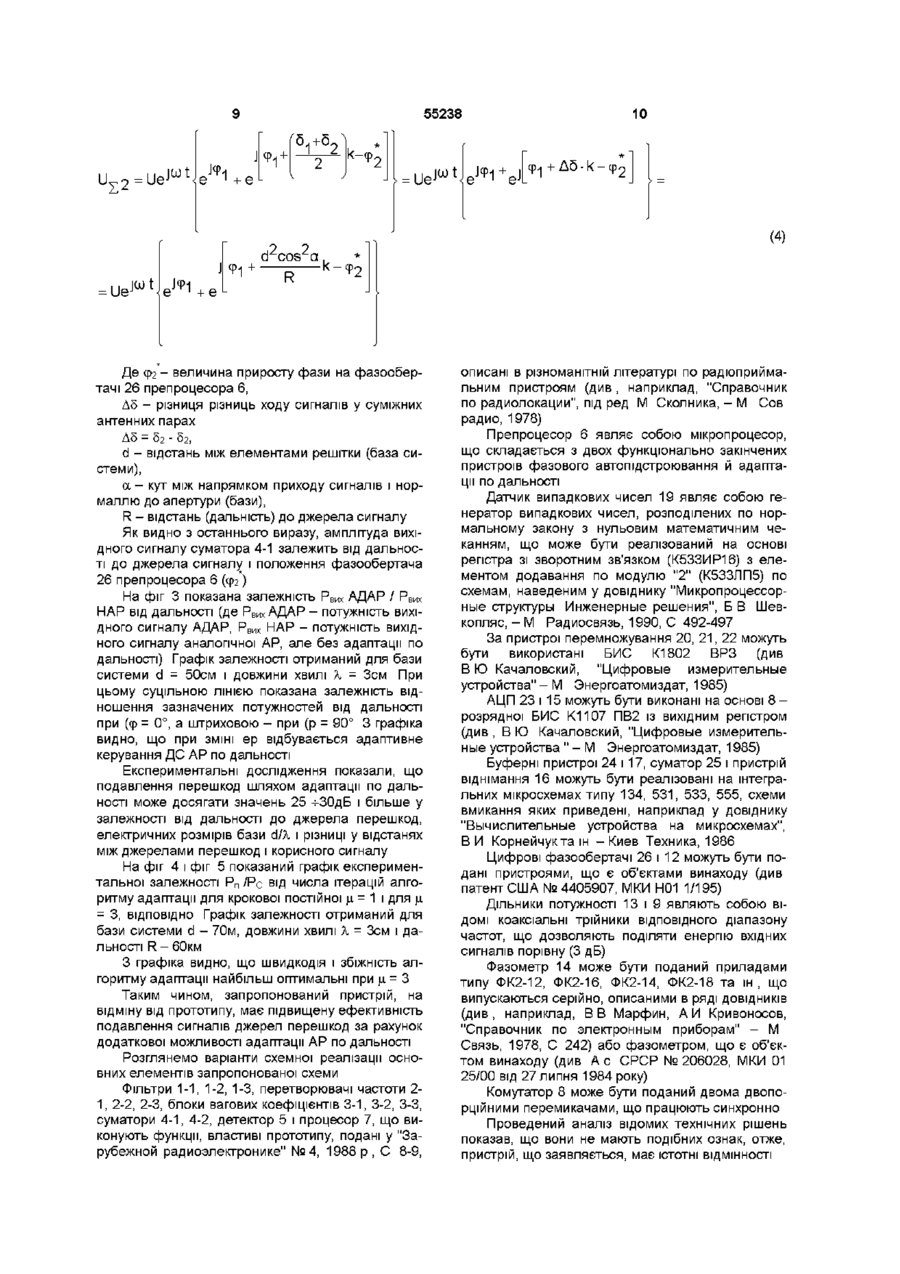
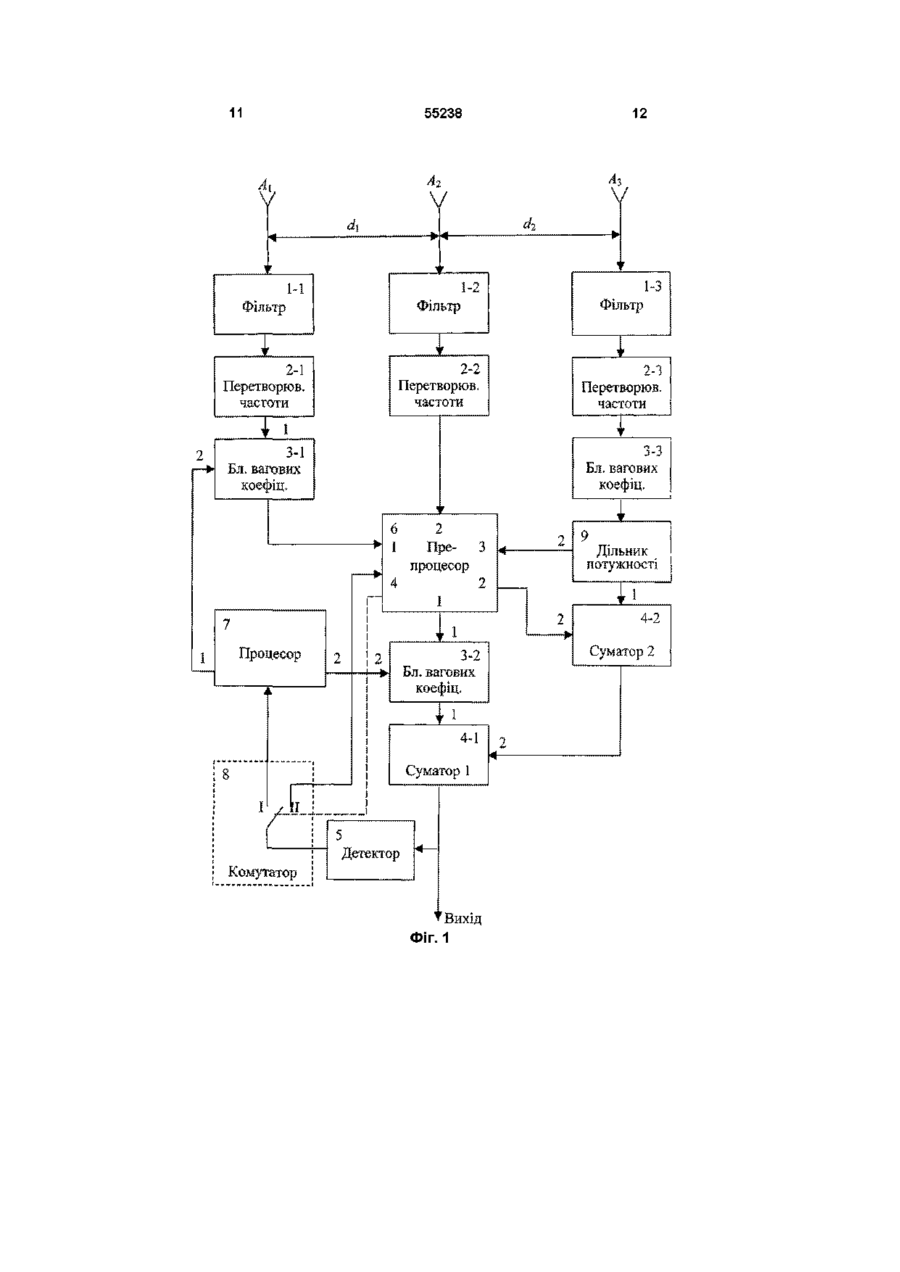
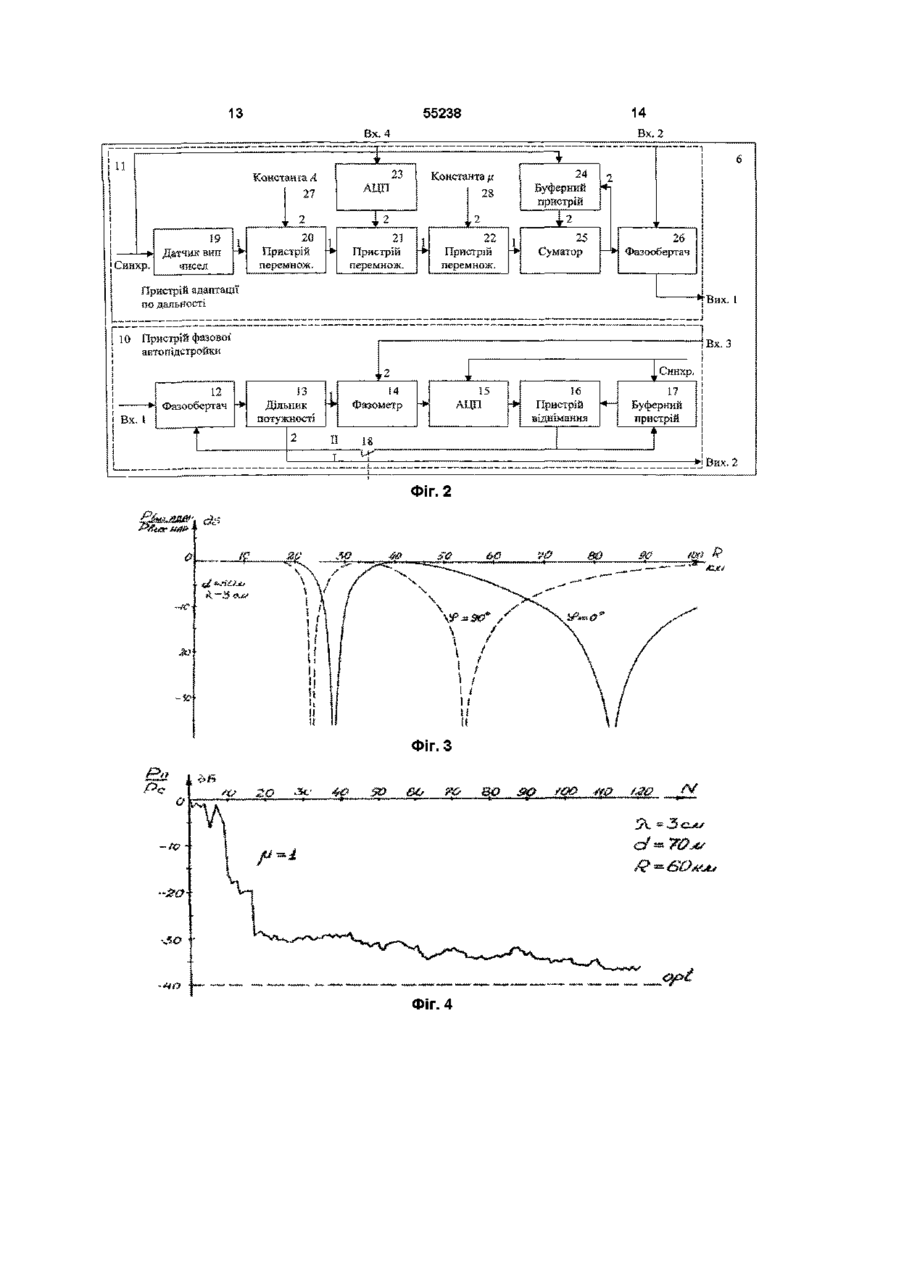
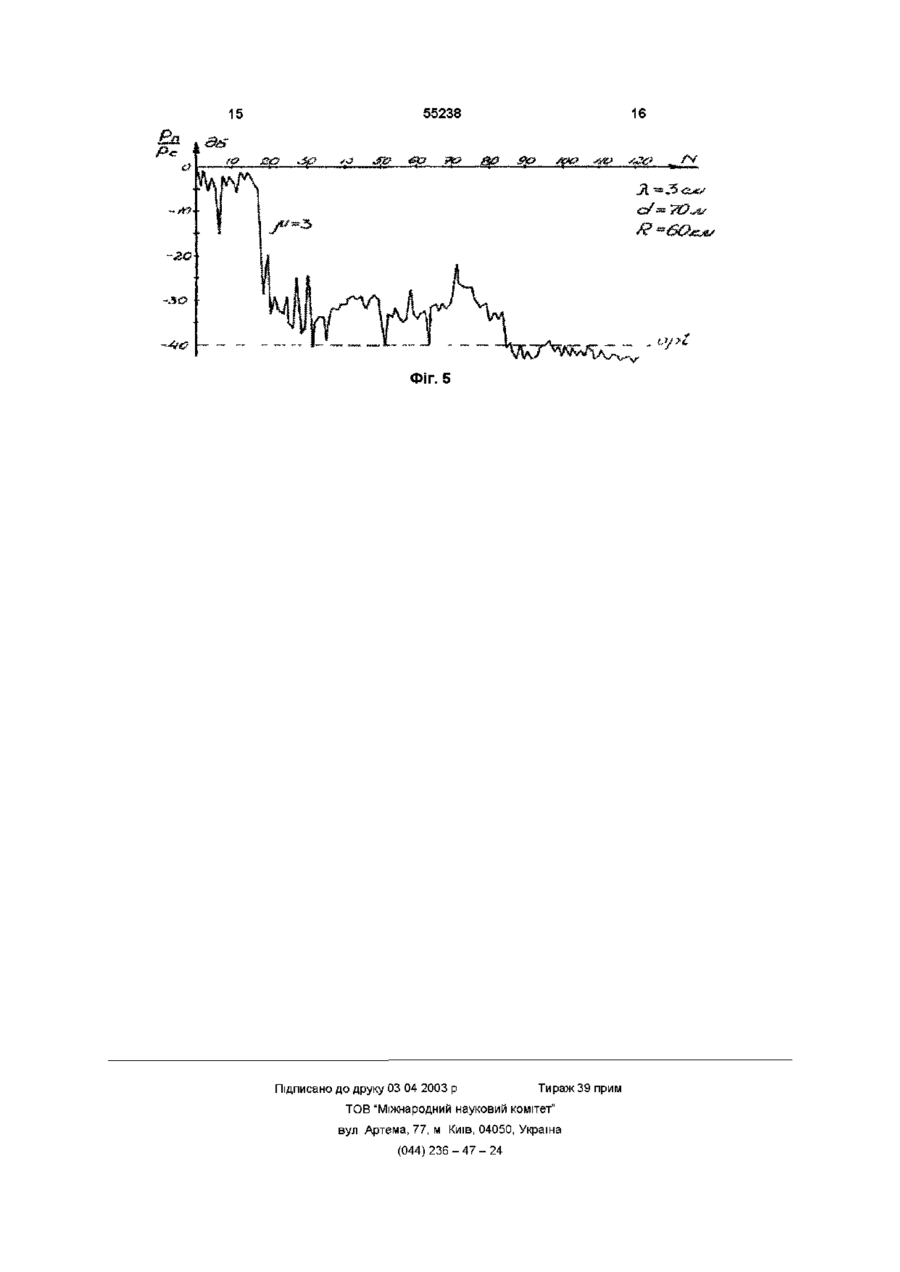
1 Адаптивна по дальності антенна решітка, що містить три рознесені у просторі й однаково орієнтовані елементи в трьох приймальних каналах, три фільтри, три перетворювачі частоти, три блоки вагових коефіцієнтів, суматор, детектор, процесор, причому виходи елементів решітки кожного з трьох каналів підключені до входів ВІДПОВІДНИХ фільтрів, виходи яких з'єднані з ВІДПОВІДНИМИ входами перетворювачів частоти, виходи перетворювачів частоти першого і третього каналів з'єднані з входами першого і третього блоків вагових коефіцієнтів, ВІДПОВІДНО, ВИХІД дру гого блока вагових коефіцієнтів з'єднаний із першим входом суматора, вихід якого є входом детектора і виходом антенної решітки, перший вихід процесора є другим входом першого блока вагових коефіцієнтів, а другий його вихід є другим входом другого блока вагових коефіцієнтів, який відрізняється тим, що в неї додатково введені препроцесор, другий суматор, комутатор і подільник потужності, причому вихід третього блока вагових коефіцієнтів через перший вихід подільника потужності з'єднаний із першим входом другого суматора, другий вихід подільника потужності з'єднаний із третім входом препроцесора, перший вхід якого є виходом першого блока вагових коефіцієнтів, другий вхід є виходом другого перетворювача частоти, четвертий вхід є виходом детектора через другий перемикач комутатора, перший і другий виходи препроцесора з'єднані, ВІДПОВІДНО з першим входом другого блока вагових коефіцієнтів і з другим входом другого суматора, вихід другого суматора з'єднаний із другим входом першого суматора, а вихід детектора є входом процесора через перший перемикач комутатора 2 Адаптивна по дальності антенна решітка за п 1, яка відрізняється тим, що препроцесор містить пристрій фазового автопідстроювання, яка складається із фазообертача, подільника потужності, фазометра, аналого-цифрового перетворювача, пристрою віднімання, буферного пристрою і комутатора, при цьому вхід фазообертача пристрою фазового автопідстроювання одночасно є першим входом препроцесора, а його вихід через подільник потужності з'єднаний із першим входом фазометра, другий вихід подільника потужності є другим виходом препроцесора, другий вхід фазометра є третім входом препроцесора, вихід фазометра через аналого-цифровий перетворювач з'єднаний із входом від'ємника пристрою віднімання, а вхід зменшуваного пристрою вирахування з'єднаний із виходом буферного пристрою, вихід пристрою віднімання підключений до інформаційного входу буферного пристрою і, паралельно через комутатор, до керуючого входу фазообертача, на синхронізуючі входи аналого-цифрового перетворювача і буферного пристрою надходять синхронізуючі імпульси, а також має пристрій адаптації по дальності, що містить послідовно з'єднані датчик випадкових чисел, три пристрої перемножування, аналого-цифровий перетворювач, буферний пристрій, суматор і фазообертач, при цьому другі входи пристроїв перемножування з'єднані, ВІДПОВІДНО, з клемою константи А, через аналогоцифровий перетворювач із четвертим входом препроцесора і з клемою константи А, другий вхід суматора з'єднаний із виходом буферного пристрою, а вихід суматора з'єднаний із другим входом буферного пристрою і керуючого входу цифрового фазообертача, входом і виходом якого є другий вхід и перший вихід препроцесора, причому на синхровходи датчика випадкових чисел і буферного пристрою подаються синхронізуючі імпульси 3 Адаптивна по дальності антенна решітка за п 1, яка відрізняється тим, що відстані між и елементами в процесі роботи змінюються однаково в обох парах 00 со сч ю ю 55238 Винахід відноситься до антенної техніки і може бути використаний в радіолокації, гідролокації, радіотехнічній розвідці, радіоелектронній боротьбі ВІДОМІ адаптивні антенні системи з придушенням перешкод по головному пелюстку діаграми спрямованості (ДС), принцип дії яких заснований на формуванні мінімуму в головному пелюстку ДС у напрямку дії перешкоди, при цьому зберігається значення ДС у напрямку приходу корисного сигналу (див заявка Великобританії 1475297 - НКИ Н4А, G4G і патент США 4129873-НКИ 343/854) Основним недоліком цих адаптивних антенних систем є необхідність розрізняння кутових координат джерела корисного сигналу і перешкоди в межах головного пелюстка ДС У цьому випадку, якщо напрямок головного пелюстка ДС приймальної антенної системи на зазначені джерела знаходяться поблизу однієї прямої, такі адаптивні антенні системи непрацездатні Найбільш близькою за технічною сутностю і виконуваним функціям до заявляємо] є адаптивна антенна решітка (АР) із змінюваними відстанями між и елементами (див "Зарубежная радиоэлектроника", №4, 1988, С 8-9), що містить три рознесені у просторі й однаково орієнтовані елементи в трьох приймальних каналах, три фільтри, три перетворювачі частоти, три блоки вагових коефіцієнтів, суматор, детектор і процесор, при цьому виходи елементів решітки кожного з трьох каналів підключені до входів ВІДПОВІДНИХ фільтрів, виходи яких з'єднані з ВІДПОВІДНИМИ входами перетворювачів частоти, виходи перетворювачів частоти кожного з каналів з'єднані з ВІДПОВІДНИМИ входами блоків вагових коефіцієнтів, а виходи блоків вагових коефіцієнтів з'єднані з трьома входами суматора, при цьому вихід суматора з'єднаний із входом детектора, а вихід детектора - із входом процесора, виходи якого з'єднані з ВІДПОВІДНИМИ керуючими входами блоків вагових коефіцієнтів першого і другого каналів, при цьому вихід суматора є виходом АР Основним недоліком прототипу є низька ефективність подавления перешкод у тому випадку, якщо джерела корисного сигналу і перешкод мають близькі за значенням кутові координати Задачею, на рішення якої спрямований винахід, є підвищення ефективності подавления перешкод по головному пелюстку ДС АР, коли джерела корисного сигналу і перешкод мають близькі за значенням кутові координати, шляхом и адаптації по дальності Таким чином, запропонований пристрій, на відміну від прототипу, має підвищену ефективність подавления сигналів джерел перешкод за рахунок додаткової можливості адаптації АР по дальності Коли джерела перешкод і корисного сигналу мають однакові або близькі за значенням кутові координати і подавления перешкоди шляхом зміни відстані між елементами відбувається неефективно, існує реальна можливість здійснювати подавления перешкоди шляхом адаптації АР по дальності У цьому випадку передбачається, що відстані від джерел перешкод і корисного сигналу до приймальної антени (решітки) різні Поставлена задача вирішується тим, що в АР, що містить три рознесені у просторі й однаково орієнтовані елементи в трьох приймальних каналах, три фільтри, три перетворювачі частоти, три блоки вагових коефіцієнтів, суматор, детектор, процесор, причому виходи елементів решітки кожного з трьох каналів підключені до входів ВІДПОВІДНИХ фільтрів, виходи яких з'єднані з ВІДПОВІДНИМИ входами перетворювачів частоти, виходи перетворювачів частоти першого і третього каналів з'єднані з входами першого і третього блоків вагових коефіцієнтів, ВІДПОВІДНО, вихід другого блока вагових коефіцієнтів з'єднаний із першим входом суматора, вихід якого є входом детектора і виходом АР, перший вихід процесора є другим входом першого блока вагових коефіцієнтів, а його другий вихід є другим входом другого блока вагових коефіцієнтів, додатково введені препроцесор, другий суматор, комутатор, дільник потужності, причому вихід третього блока вагових коефіцієнтів через перший вихід дільника потужності з'єднаний із першим входом другого суматора, другий вихід дільника потужності з'єднаний з третім входом препроцесора, перший вхід якого є виходом першого блока вагових коефіцієнтів, другий вхід є виходом другого перетворювача частоти, четвертий вхід є виходом детектора через другий перемикач комутатора, перший і другий виходи препроцесора з'єднані, ВІДПОВІДНО, з першим входом другого блока вагових коефіцієнтів і з другим входом другого суматора, вихід другого суматора з'єднаний із другим входом першого суматора, вихід детектора є входом процесора через перший перемикач комутатора На фіг 1 наведена структурна схема адаптивної по дальності АР (АДАР), на фіг 2 - структурна схема препроцесора, на фіг 3 - криві залежності відношення вихідної потужності адаптивної АР до вихідної потужності неадаптивної АР РВИх АДАР /РВИХ НАР від дальності, а на фіг 4 і фіг 5 показані графіки експериментальної залежності відношення потужності перешкоди до потужності сигналу Рп / Рс від числа ітерацій алгоритму адаптації для крокової постійної ц, = 1 і для ц, = 3, ВІДПОВІДНО Таким чином, ВІДМІННІСТЬ запропонованого технічного рішення від відомого пристрою полягає втому, що для підвищення ефективності подавления перешкод по головному пелюстку ДС АР, коли джерела перешкод і корисного сигналу мають однакові або близькі за значенням кутові координати і подавления перешкоди шляхом зміни відстані між елементами відбувається неефективно, у схему додатково введений препроцесор, що забезпечує адаптивне керування головним пелюстком ДН по дальності у випадку неоднаковості дальностей до джерел корисного сигналу і перешкоди він здійснює подавления перешкоди по головному пелюстку ДН АДАР (фіг 1) містить такі елементи приймальні елементи А-і, Аг, Аз, фільтри 1-1, 1-2, 1-3, перетворювачі частоти 2-1, 2-2, 2-3, блоки вагових коефіцієнтів 3-1, 3-2, 3-3, суматори 4-1, 4-2, детектор 5, препроцессор 6, процесор 7, комутатор 8, дільник потужності 9, причому виходи елементів решітки кожного з трьох каналів А-і, Аг, Аз підклю 55238 чені до входів ВІДПОВІДНИХ фільтрів 1-1, 1-2, 1-3, виходи яких з'єднані з ВІДПОВІДНИМИ входами перетворювачів частоти 2-1, 2-2, 2-3, виходи перетворювачів частоти першого 2-1 і третього 2-3 каналів з'єднані з входами першого 3-1 і третього 3-3 блоків вагових коефіцієнті, ВІДПОВІДНО, ВИХІД другого блока вагових коефіцієнтів 3-2 з'єднаний із першим входом першого суматора 4-1, вихід якого є входом детектора 5 і виходом АДАР, перший вихід процесора 7 є другим входом першого блока вагових коефіцієнтів 3-1, а другий його вихід є другим входом другого блока вагових коефіцієнтів 3-2, вихід третього блока вагових коефіцієнтів 3-3 через перший вихід дільника потужності 9 з'єднаний із першим входом другого суматора 4-2, другий вихід дільника потужності 9 з'єднаний із третім входом препроцесора 6, перший вхід якого є виходом першого блока вагових коефіцієнтів 3-1, другий вхід є виходом другого перетворювача частоти 2-2, четвертий вхід є виходом детектора 5 через другий перемикач комутатора 8, перший і другий виходи препроцесора 6 з'єднані, ВІДПОВІДНО, З першим входом другого блока вагових коефіцієнтів 3-2 і з другим входом другого суматора 4-2, вихід другого суматора 4-2 з'єднаний із другим входом першого суматора 4-1, вихід детектора 5 є входом процесора 7 через перший перемикач комутатора 8 Препроцесор 6 (фіг 2) містить пристрій фазового автопідстроювання (ФАП) 10 і пристрій адаптації по дальності (ПАД) 11 ФАП складається з фазообертача 12, дільника потужності 13 (3 дБ), фазометра 14, аналого-цифрового перетворювача (АЦП) 15, пристрою віднімання 16, буферного пристрою 17 і комутатора 18 Вхід фазообертача 12 пристрою ФАП 10 одночасно є першим входом препроцесора 6, а його вихід через дільник потужності 13 з'єднаний із першим входом фазометра 14, другий вихід дільника потужності 13 є другим виходом препроцесора 6 Другий вхід фазометра 14 є третім входом препроцесора 6 Вихід фазометра 14 через АЦП 15 з'єднаний із входом від'ємника пристрою віднімання 16, а вхід зменшуваного пристрою віднімання 16 з'єднаний із виходом буферного пристрою 17 Вихід пристрою віднімання 16 підключений до інформаційного входу буферного пристрою 17 і, паралельно, через комутатор 18, до керуючого входу фазообертача 12 На синхронізуючі входи АДП 15 і буферного пристрою 17 надходять синхронізуючі імпульси Пристрій адаптації по дальності (ПАД) 11 містить послідовно з'єднані датчик випадкових чисел (ДВЧ) 19, три пристрої перемножування 20, 21, 22, АЦП 23, буферний пристрій 24, суматор 25 і фазообертач 26 При цьому другі входи пристроїв перемножування 20, 21, 22 з'єднані, ВІДПОВІДНО, З клемою константи А 27, через АЦП 23 із четвертим входом препроцесора 6 і з клемою константи ц 28 Другий вхід суматора 25 з'єднаний із виходом буферного пристрою 24, а вихід суматора 25 з'єднаний із другим входом буферного пристрою 24 і керуючим входом цифрового фазообертача 26, входом і виходом якого є другий вхід і перший вихід препроцесора 6 На синхровходи ДВЧ 19 і буферного пристрою 24 подаються синхронізуючі імпульси 6 Для забезпечення працездатності системи в обох режимах (з адаптацією як по напрямку (у прототипі), так і по дальності) у схему включений комутатор, що складається з двох перемикачів, перший із яких стоїть на виході детектора, а другий - на керуючому вході фазообертача пристрою ФАП препроцесора АДАР працює таким чином Сигнали від джерел корисного сигналу і перешкоди надходять на антени трьох приймальних каналів А-і, Аг, Аз, які рознесені в просторі і знаходяться на одній прямій лінії Після фільтрації в кожному каналі ВІДПОВІДНИМИ фільтрами 1-1, 1-2 і 1-3 і частотного перетворення за допомогою ВІДПОВІДНИХ перетворювачів частоти 2-1, 2-2 і 2-3 сигнали першого і третього (бокових) каналів надходять на блоки вагових коефіцієнтів 3-1 і 3-3, ВІДПОВІДНО, а сигнал другого (центрального) каналу з виходу другого перетворювача частоти 2-2 надходить на вхід 2 препроцесора 6 (на вхід фазообертача 26), із виходу 1 якого надходить на перший вхід блока вагових коефіцієнтів другого каналу 3-2 3 виходу блока вагових коефіцієнтів першого каналу 3-1 сигнал через фазообертач 12 препроцесора 6 (вхід 1 препроцесора 6) із виходу 2 надходить на другий вхід другого суматора 4-2, на перший вхід якого через дільник потужності 9 надходить сигнал із виходу блока вагових коефіцієнтів третього каналу 3-3 Вихідний сигнал із другого суматора 4-2 надходить на другий вхід першого суматора 4-1, на перший вхід якого надходить сигнал із виходу блока вагових коефіцієнтів другого каналу 3-2 Сигнал із виходу суматора 4-1 через детектор 5 і перемикач комутатора 8, що знаходиться в положенні І, надходить на вхід процесора 7 і на вихід системи Процесор 7 управляє блоками вагових коефіцієнтів першого 3-1 і другого 3-2 каналів по відповідному алгоритму При цьому відстані між елементами решітки di і сЬ (у даному режимі) встановлюються неоднаковими Оскільки di і сЬ значно більші довжини хвилі, то у головному пелюстку ДС з'являються провали, положення яких управляється за допомогою процесора 7 У описаному вище режимі адаптивна антенна система (ААС) працює аналогічно прототипу і забезпечує подавления перешкод по головному пелюстку ДС, коли кутові координати джерел корисного сигналу і перешкоди дозволяють проводити їхню селекцію в межах головного пелюстка ДС Коли кутові координати джерел корисного сигналу і перешкоди збігаються або близькі, то система-прототип стає непрацездатною При цьому, якщо джерела корисного сигналу і перешкоди різняться по дальності, то, перевівши систему в режим адаптації по дальності, можна забезпечити подавления перешкод і в цьому випадку 3 цією метою обидва перемикачі комутатора 8 переводять з положення І у положення II При цьому вихідний сигнал детектора 5 відключається від процесора 7 і підключається до входу 4 препроцесора 6 Одночасно другий перемикач підключає вихід від'ємника пристрою віднімання 16 (див фіг 2) до керуючого входу фазообертача 12 пристрою ФАП 10 При цьому пристрій ФАП 10 препроцесора 6 забезпечує рівність фаз сигналів першого і третьо 55238 го каналів на вході другого суматора 4-2 у такий спосіб Сигнали з виходів блоків вагових коефіцієнтів першого 3-1 і третього 3-3 каналів надходять на вхід фазометра 14 препроцесора 6 Причому з виходу першого приймального каналу Аі сигнал надходить через керований цифровий фазообертач 12 і дільник потужності 13 Сигнал, пропорційний різниці фаз між першим і третім каналами, через АЦГТ 15 препроцесора 6 подається на вхід від'ємника пристрою віднімання 16, на вхід зменшуваного якого подається код установленої фази цифрового фазообертача 12 із буферного пристрою 17 Якщо різниця фаз дорівнює нулю, то результат на виході від'ємника пристрою віднімання 16 не змінюється і положення фазообертача 12 залишається колишнім Якщо між сигналами першого і третього приймальних каналів виникає різниця фаз, то з фазометра 14 препроцесора 6 через АЦП 15 на вхід від'ємника пристрою віднімання 16 надходить код різниці фаз, що зрівнюється з кодом буферного пристрою 17 і різниця кодів надходить на керуючий вхід цифрового фазообертача 12 і в буферний пристрій 17 Фазообертач 12 встановлюється в нове положення, а фаза сигналу першого приймального каналу Аі на вході суматора 4-2 стає рівною фазі сигналу третього приймального каналу Аз фі=фз У цьому випадку на виході сумматора 4-2 утвориться сигнал де U - амплітуда сигналу одного каналу, Фі - фаза сигналу першого приймального каналу, Фз - фаза сигналу третього приймального каналу, Фз(і) - фаза сигналу третього приймального каналу на виході фазообертача 6-9 (срз(і) = ср-і) У такий спосіб забезпечується синфазне підсумовування сигналів першого і третього каналів на суматорі 4-2, у результаті чого амплітуда сигналу на виході суматора 4-2 не залежить від випадкового співвідношення фаз сигналів бокових каналів Сигнал із виходу детектора 5 (через другий перемикач комутатора 8) подається на вхід 4 препроцесора 6 і в роботу включається пристрій адаптації по дальності (ПАД) препроцесора 6 При цьому ДВЧ 19 виробляє коди випадкових чисел із нормальним законом розподілу і нульовим математичним чеканням, що надходять на один із входів пристрою перемножування 20, на другий вхід якого надходить код константи А 27, що визначає дисперсію випадкових чисел 3 виходу пристрою перемножування 20 результуючий код надходить на перший вхід пристрою перемножування 2 1 , на другий вхід якого з детектора 5, через АЦП 23 надходить сигнал, пропорційний потужності вихідного сигналу АР Код сигналу з виходу пристрою перемножування 21 надходить на перший вхід пристрою перемножування 22, на другий вхід яко 8 го надходить код константи ф 28, що визначає крокову постійну алгоритму адаптації 3 виходу пристрою перемножування 22 код результату надходить на перший вхід суматора 25, на другий вхід якого надходить код попереднього результату Wk, із буферного пристрою 24 3 виходу суматора 25 сигнал надходить на керуючий вхід цифрового фазообертача 26, що забезпечує адаптацію по дальності шляхом пошуку оптимальної фази сигналу другого каналу по відношенню до фази суми сигналів першого і третього каналів При цьому сигнал другого каналу з перетворювача частоти 22, проходячи через фазообертач 26 препроцесора 6, змінює свою фазу ВІДПОВІДНО ДО спрощеного алгоритму ЛІНІЙНОГО випадкового пошуку і через блок вагових коефіцієнтів 3-2 другого каналу надходить на перший вхід суматора 4-1 На другий вхід суматора 4-1 надходить сумарний сигнал першого і третього приймальних каналів із виходу суматора 4-2 У режимі адаптації по дальності в системі встановлюється однакова міжелементна відстань di = d2 і приблизно рівна 1000 -ь 3000 довжин хвиль Якщо фронт хвилі плоский, то різниця ходу сигналів першого і другого приймальних каналів 5і дорівнює різниці ходу сигналов другого і третього приймальних каналів 52, тобто 5і = 5г = 5 Різниця ж ходу сигналів між антенами Аі і Аз першого і третього приймальних каналів, ВІДПОВІДНО, дорівнює 5з = 25 Такі ж співвідношення будуть і для різниці фаз, тобто Д5і2 = А5гз - А5 і Д5із = 2 Д5 При цьому сумарний сигнал на виході суматора 4-2 має фазу Ч 1 + ФЗ > Фі + [Фі + к(5і + 52^ 2 С2) де к=2ті/Я, - хвильове число, Ф2 - фаза сигналу другого приймального каналу Оскільки коефіцієнти підсилення антен d і G3 однакові і дільники потужності 13 (препроцесора 6) і 9 поділяють їх строго навпіл, отже, на суматорі 42 складаються сигнали першого і третього каналів однакової амплітуди Сигнали, що надходять на входи суматора 4-1, складаються у фазі в тому випадку, якщо фазообертач 26 препроцесора 6 встановлений у відповідне положення і фаза сигналу другого каналу на першому вході суматора 41 дорівнює фазі сигналу цього ж каналу на виході антени Аг, а також фазі сигналу на виході суматора 4-2 Тоді сумарний сигнал на виході суматора 4-1 має вид Us2=Uejajt|e = i 2Uej (3) Для сферичного фронту д\ Ф 02 і фаза сумарного сигналу з виходу суматора 4-2
ДивитисяДодаткова інформація
Назва патенту англійськоюAntenna array with distance adaptation
Автори англійськоюFedorov Volodymyr Ivanovych
Назва патенту російськоюАнтенная решетка с адаптацией по дальности
Автори російськоюФедоров Владимир Иванович
МПК / Мітки
МПК: G01S 5/04
Мітки: антенна, решітка, дальності, адаптивна
Код посилання
<a href="https://ua.patents.su/8-55238-adaptivna-po-dalnosti-antenna-reshitka.html" target="_blank" rel="follow" title="База патентів України">Адаптивна по дальності антенна решітка</a>
Адаптивна антенна решітка
Номер патенту: 23307
Опубліковано: 31.08.1998
Автори: Лисий Михайло Іванович, Назаров Дмитро Вікторович, Поспєлов Борис Борисович
МПК: H01Q 21/00
Мітки: адаптивна, антенна, решітка
Формула / Реферат:
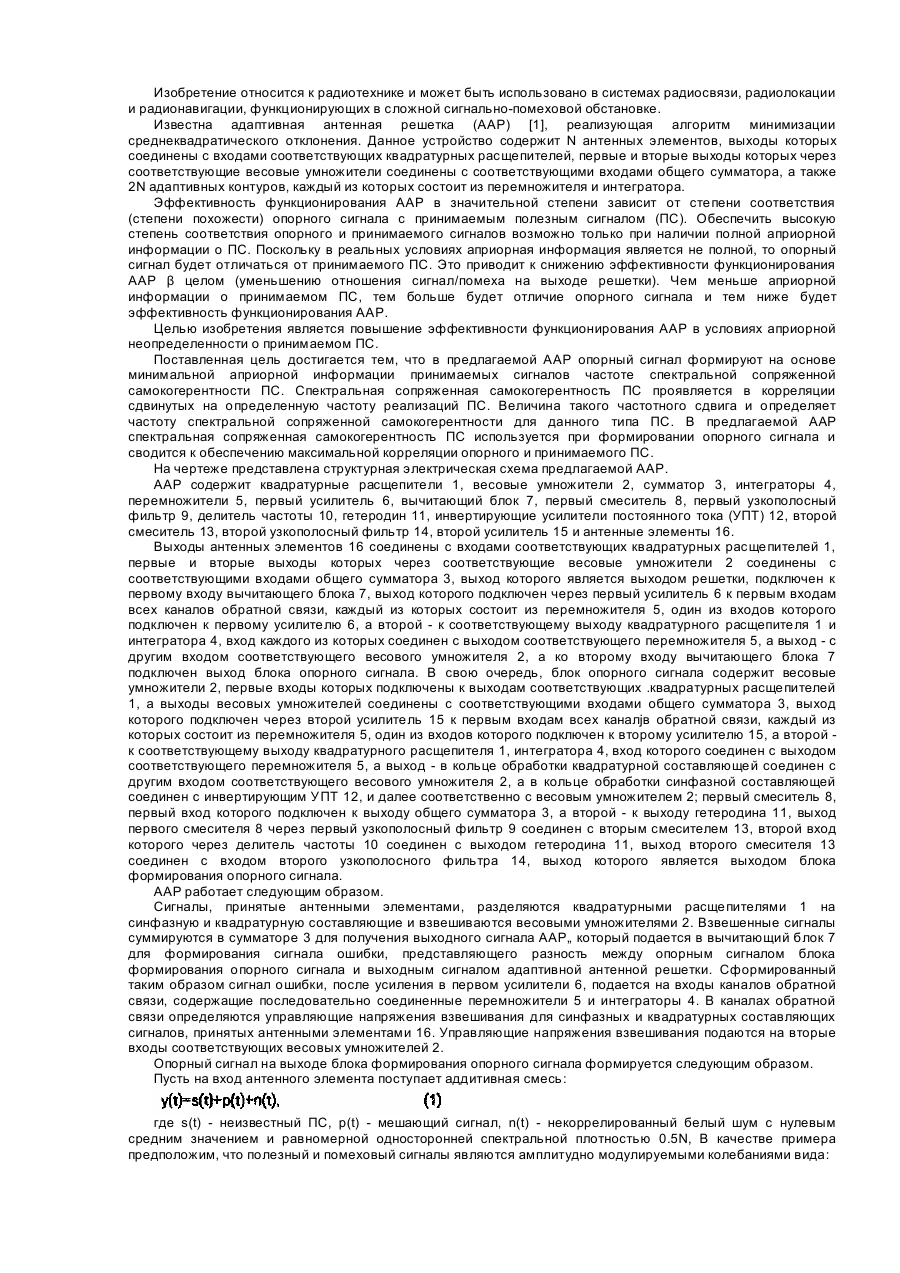
Адаптивная антенная решетка (ΑΑΡ), содержащая N антенных элементов, выходы которых соединены с входами соответствующих квадратурных расщепителей, первые и вторые выходы которых через соответствующие весовые умножители соединены с соответствующими входами общего сумматора, выход которого является выходом решетки, подключен к первому входу вычитающего блока, выход которого подключен через первый усилитель к первым входам всех...
Фазована антенна решітка
Номер патенту: 36155
Опубліковано: 16.04.2001
Автори: Гончаренко Андрій Миколайович, Литвин Володимир Іванович
МПК: H01Q 21/00
Мітки: решітка, антенна, фазована
Текст:
...коефіцієнт її напрямленої дії. В переважному варіанті виконання дана ФАР виконується суміщеною (прийомо-передавальною). Її стр уктурна схема подана на фіг.3. ФАР містить вхідні 1 і вихідні 2 клеми, до яких підключено N модулів З, кожний з яких містить напрямлений відвітлювач 4, до якого підключено одинична антена 5 і послідовно з'єднані частотночутливий елемент 6 і узгоджений підсилювач 7. У разі відсутності розподілу прийомного і...
Адаптивна резервована система
Номер патенту: 51152
Опубліковано: 15.11.2002
Автори: Доценко Наталія Володимирівна, Дергачов Володимир Андрійович, Кулік Анатолій Степанович
МПК: G06F 11/18
Мітки: адаптивна, система, резервована
Формула / Реферат:
Адаптивна резервована система, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, двійковий лічильник, перший і другий елементи АБО, причому вихід і -го блока, що резервується з'єднаний з першим входом і-го елемента І, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І, вихід якого з'єднаний з і-им входом першої групи входів порогового елемента, вихід порогового...
Вібраторна антенна решітка для прийому несинусоідальних сигналів
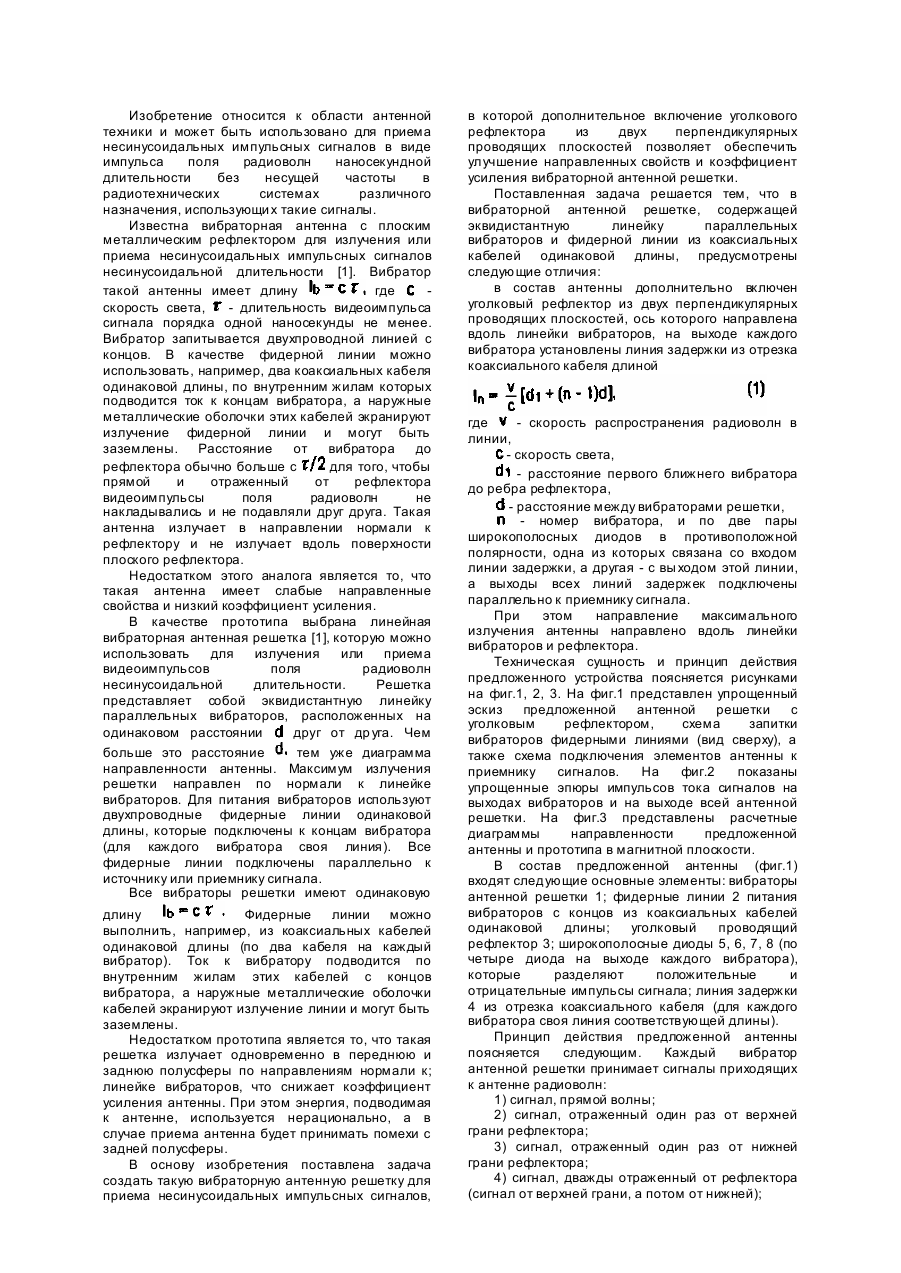
Номер патенту: 15478
Опубліковано: 30.06.1997
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: решітка, прийому, несинусоідальних, сигналів, вібраторна, антенна
Формула / Реферат:
Вибраторная антенная решетка для приема несинусоидальных импульсных сигналов, содержащая эквидистантную линейку параллельных вибраторов и фидерные линии питания вибраторов из коаксиальных кабелей одинаковой длины, отличающаяся тем, что в состав антенны дополнительно включен уголковый рефлектор из двух перпендикулярных проводящих плоскостей, ось которого направлена вдоль линейки вибраторов, на выходе каждого вибратора установлены линия...
Вібраторна антенна решітка кругової поляризації
Номер патенту: 32198
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Кудрик Андрій Миколайович, Пророшин Сергій Михайлович
МПК: H01Q 21/06
Мітки: решітка, вібраторна, кругової, антенна, поляризації
Текст:
...збільшення відстаней між сусідніми вібраторами звичайно не вдається, бо при цьому сильно зростають інтерференційні пелюстки діаграми направленості і їхній рівень стає порівняний з рівнем головної пелюстки. Тому практичний інтерес представляє задача зменшення ширини головної пелюстки діаграми спрямування антенної решітки без збільшення кількості вібраторів решітки і без значного збільшення рівня бокових та інтерференційних пелюсток. Можливе...
Попередній патент: Пристрій для рейкового кріплення
Наступний патент: Технічна фільтрувальна тканина
Випадковий патент: Спосіб регулювання процесу імпульсно-дугового зварювання плавким електродом в середовищі захисних газів