Спосіб вимірювання параметрів руху і вібрації
Номер патенту: 63184
Опубліковано: 26.09.2011
Автори: Пилипенко Олег Вікторович, Горєв Микола Борисович, Коджеспірова Інна Федорівна, Привалов Євген Миколайович, Доронін Олексій Володимирович




Формула / Реферат
Спосіб вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти, утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом у хвилевідній секції з двома зондами, розташованими один від одного на відстані однієї восьмої довжини хвилі електромагнітного випромінювання у хвилеводі та з'єднаними з напівпровідниковими детекторами, і математичну обробку цих квадратурних сигналів, який відрізняється тим, що з виміряних струмів напівпровідникових детекторів визначають миттєве значення коефіцієнта відбиття в момент вимірювання, квадратурні сигнали визначають із знайденого коефіцієнта відбиття та виміряних струмів напівпровідникових детекторів без диференціювання цих струмів, і за цими сигналами визначають переміщення об'єкта ![]() в момент вимірювання відносно його положення в початковий момент часу
в момент вимірювання відносно його положення в початковий момент часу ![]() за формулами:
за формулами:
![]() ,
, ![]() ,
,
 ,
,
![]() ,
, ![]() ,
,

![]() ,
, ![]() ,
,
де: ![]() - виміряний струм напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом (далі - детектор 1);
- виміряний струм напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом (далі - детектор 1);
![]() - виміряний струм напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом (далі - детектор 2);
- виміряний струм напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом (далі - детектор 2);
![]() - струм детектора 1 в режимі біжучої хвилі;
- струм детектора 1 в режимі біжучої хвилі;
![]() - струм детектора 2 в режимі біжучої хвилі;
- струм детектора 2 в режимі біжучої хвилі;
![]() - відносний струм детектора 1;
- відносний струм детектора 1;
![]() - відносний струм детектора 2;
- відносний струм детектора 2;
![]() - коефіцієнт відбиття;
- коефіцієнт відбиття;
![]() - нерозгорнута фаза;
- нерозгорнута фаза;
![]() - розгорнута фаза;
- розгорнута фаза;
![]() ,
, ![]() ,
, ![]() , ....,
, ...., ![]() , ..., - моменти вимірювань;
, ..., - моменти вимірювань;
![]() - номер вимірювання;
- номер вимірювання;
![]() - довжина хвилі електромагнітного випромінювання генератора у вільному просторі,
- довжина хвилі електромагнітного випромінювання генератора у вільному просторі,
причому формула, що виражає коефіцієнт відбиття через виміряні струми напівпровідникових детекторів, є застосовною в діапазоні коефіцієнтів відбиття, обмеженому зверху величиною ![]() .
.
Текст
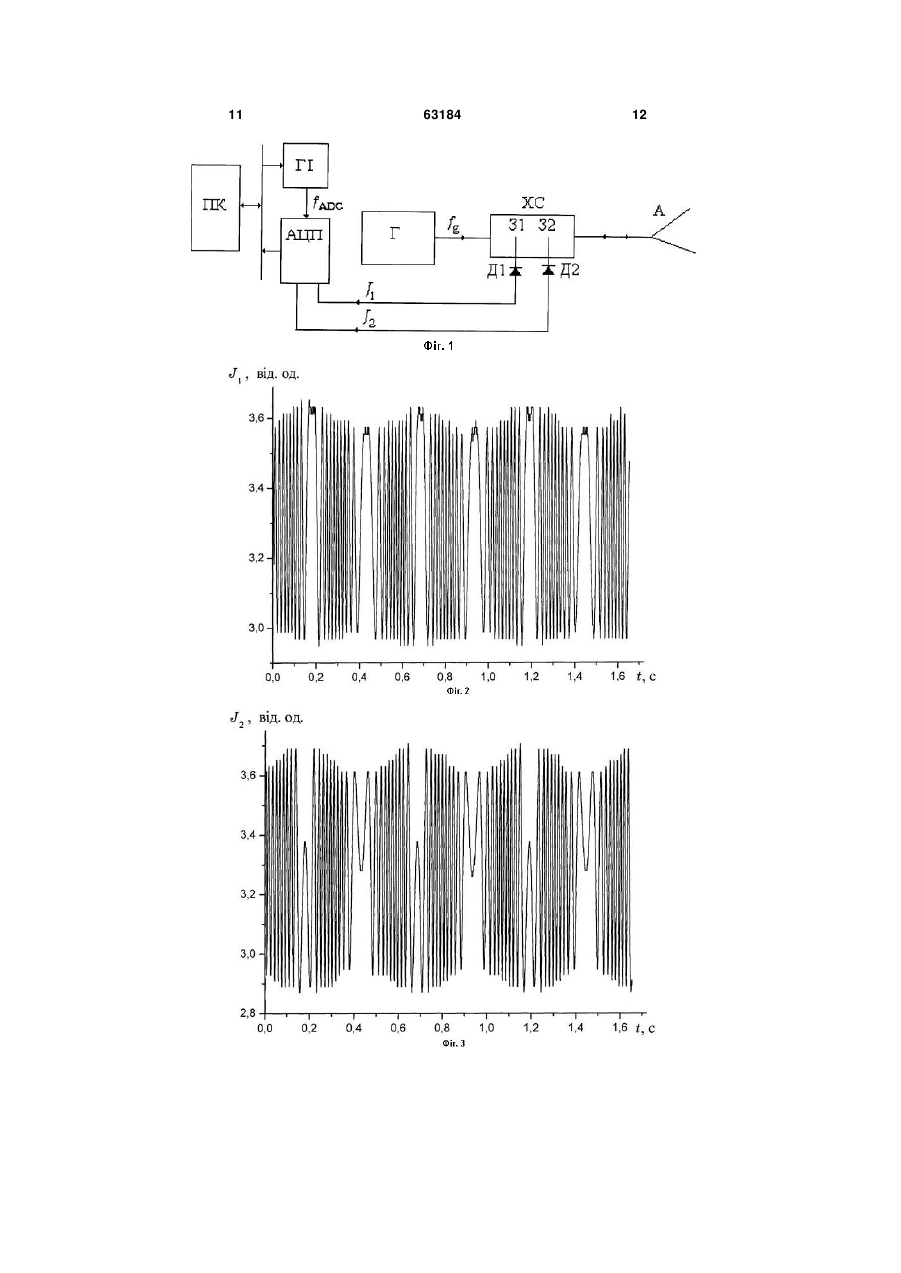
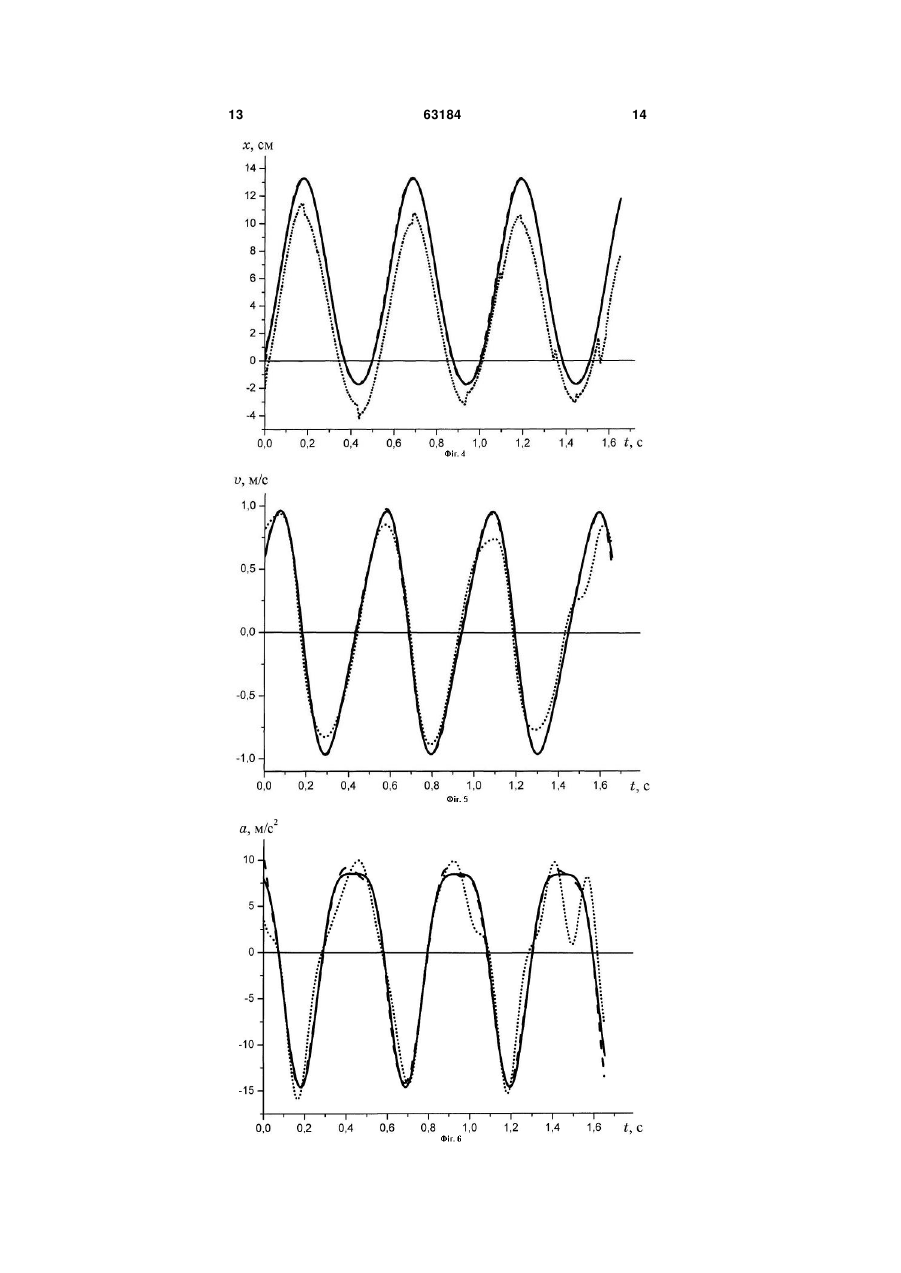
Спосіб вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти, утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним Jr1tn 12 Jr 2 tn 12 , Jr1tn Jr 2 tn J t Jr 2 tn r1 n 2 2 2 r t n 1 Jr 2 t n r t n 2 1 Jr1 t n , sin t n , 2r t n 2r t n 0, n 0 t n t n 1 t n t n 1 , t n t n 1 , n 1 2,..., , , t n 1 t n t n 1 2 sgn t n t n 1 , t n t n 1 , n 1 2,..., x t n в t n , n 0,1 2,... , , 4 де: J1 - виміряний струм напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом (далі - детектор 1); J 2 - виміряний струм напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом (далі - детектор 2); (19) (11) sin t n , sin t n 0, cos t n 0 arctg cos t n sin t n t n arctg , sin t n 0, cos t n 0, чи sin t n 0, cos t n 0 cos t n sin t n 2, sin t n 0, cos t n 0 arctg cos t n 63184 2 UA cos t n 2 U r tn J1t n J t , Jr 2 t n 2 n , J10 J20 (13) Jr1t n сигналом у хвилевідній секції з двома зондами, розташованими один від одного на відстані однієї восьмої довжини хвилі електромагнітного випромінювання у хвилеводі та з'єднаними з напівпровідниковими детекторами, і математичну обробку цих квадратурних сигналів, який відрізняється тим, що з виміряних струмів напівпровідникових детекторів визначають миттєве значення коефіцієнта відбиття в момент вимірювання, квадратурні сигнали визначають із знайденого коефіцієнта відбиття та виміряних струмів напівпровідникових детекторів без диференціювання цих струмів, і за цими сигналами визначають переміщення об'єкта x в момент вимірювання відносно його положення в початковий момент часу t 0 за формулами: 3 63184 4 J10 - струм детектора 1 в режимі біжучої хвилі; n 0,1 2,... - номер вимірювання; , J20 - струм детектора 2 в режимі біжучої хвилі; в - довжина хвилі електромагнітного випромінювання генератора у вільному просторі, причому формула, що виражає коефіцієнт відбиття через виміряні струми напівпровідникових детекторів, є застосовною в діапазоні коефіцієнтів від Jr1 - відносний струм детектора 1; Jr 2 - відносний струм детектора 2; r - коефіцієнт відбиття; - нерозгорнута фаза; - розгорнута фаза; t 0 , t1 , t 2 , ...., t n , ..., - моменти вимірювань; Корисна модель належить до вимірювальної техніки, зокрема до засобів вимірювання параметрів вібрації. Для побудови вимірювачів параметрів руху, зокрема вібрацій, досить привабливим є застосування радіохвилевих методів. Це зумовлене цілою низкою причин, найбільш вагомими з яких є безінерційність і відсутність механічного контакту з контрольованим об'єктом. Одним з поширених радіохвилевих методів є інтерференційний метод (Викторов В.А. Радиоволновые измерения параметров технологических процессов / В.А. Викторов, Б.В. Лункин, А.С. Совлуков. - М: Энергоатомиздат, 1989. - 208 с.). В основі цього методу лежить визначення параметрів руху за параметрами стоячої електромагнітної хвилі, що утворилася внаслідок інтерференції зондуючої хвилі з хвилею, відбитої від контрольованого об'єкта. Однак в цьому методі безпосереднє однозначне визначення переміщення об'єкта можливе тільки для переміщень, амплітуда яких не перевищує λ4, де λ - довжина хвилі електромагнітного випромінювання. Відомі способи, де проблема однозначного визначення переміщення для довільних значень його амплітуди вирішується шляхом проведення вимірювань стоячої хвилі в двох просторово розділених точках (Н.Б. Горев. Двухзондовая методика измерения параметров движения механических объектов интерференционным методом / Н.Б. Горев, М.М. Жечев, П.И. Заболотный, И.Ф. Коджеспирова, Е.Н. Привалов // Актуальные проблемы электронного приборостроения: 9-я международная конференция, сентябрь, 2008 г., Новосибирск: сб. материалов. - Новосибирск: НГТУ, 2008. - Т. 3. - c. 34-37; Пилипенко О.В. Измерение параметров движения механических объектов интерференционным методом с использованием двух зондов / О.В. Пилипенко, Н.Б. Горев, М.М. Жечев, Л.Г. Запольский, П.И. Заболотный, И.Ф. Коджеспирова, Е.Н. Привалов // Техническая механика. - 2009. № 1. - c. 111-117). Однак в цих способах треба знати коефіцієнт відбиття, що вимагає проведення калібрування при зміні об'єкта, стану його поверхні і/або відстані до нього. Найбільш близьким технічним рішенням, обраним за прототип, є спосіб вимірювання параметрів руху і вібрації (Патент на корисну модель 55873 Україна, МПК G01H 9/00. Спосіб вимірювання параметрів руху і вібрації / Пилипенко О.В., Горєв М.Б., Коджеспірова І.Ф., Привалов Є.М.; биття, обмеженому зверху величиною 1/ 2 . заявник і патентовласник - Інститут технічної механіки НАНУ і НКАУ. - u201008039; заявл. 29.06.2010; опубл. 27.12.2010, Бюл. № 24. - 9 с.), в якому об'єкт, що вібрує, зондується електромагнітними хвилями діапазону надвисоких частот (НВЧ) і параметри руху об'єкта визначаються за фазою відбитого від нього сигналу. Відбитий від об'єкта сигнал змішується з опорним сигналом в хвилевідній секції, що містить два зонди, розташовані на відстані однієї восьмої довжини хвилі електромагнітного випромінювання в хвилеводі один від одного. З цими зондами з'єднані напівпровідникові детектори, зі струмів яких за допомогою подвійного диференціювання виділяються два квадратурні сигнали. За цими сигналами визначається швидкість об'єкта і інтегруванням швидкості знаходиться його переміщення. Спосіб не потребує калібрування при зміні досліджуваного об'єкта, стану його поверхні і/або відстані до нього. Однак у виміряних струмах детекторів присутня шумова складова, особливо при вимірюваннях у вільному просторі, в зв'язку з чим диференціювання струмів, особливо подвійне, може призводити до появи значної похибки. Крім того, в цьому способі коефіцієнт відбиття вважається незмінним під час вимірювань, однак в реальній практиці це припущення виконується не завжди. Технічною задачею, на вирішення якої направлена корисна модель, є створення способу, що дозволяє вимірювати параметри руху при довільному співвідношенні між амплітудою переміщення і довжиною хвилі зондуючого НВЧ-сигналу без необхідності проведення диференціювання виміряних сигналів та для коефіцієнта відбиття, що може змінюватися під час вимірювань. У відповідності зі сказаним вище технічний результат, що досягається при здійсненні корисної моделі, полягає в підвищенні точності вимірювань за рахунок відмови від диференціювання виміряних сигналів, що неминуче містять шумову складову, та урахування змінності коефіцієнта відбиття під час вимірювань. В способі, що пропонується в цій корисній моделі, як і у прототипі, інтерференція відбитого та опорного сигналів відбувається в хвилевідній секції і квадратурні сигнали містяться в струмах напівпровідникових детекторів, що з'єднані з двома зондами, розміщеними в цій секції. Однак, на відміну від прототипу, ці сигнали виділяються за допомогою математичної обробки струмів напівпро 5 63184 відникових детекторів, що не містить операції диференціювання. Ця обробка також дозволяє визначити миттєве значення коефіцієнта відбиття, що, як і у прототипі, робить непотрібним проведення калібрування при зміні об'єкта або відстані до нього та, на відміну від прототипу, дозволяє проводити вимірювання у випадку, коли коефіцієнт відбиття змінюється під час вимірювань. Структурна схема апаратної реалізації способу наведена на фіг. 1, де: А - рупорна антена; ХС - хвилевідна секція; З1, З2 - зонди; Д1, Д2 - напівпровідникові детектори; Г - НВЧ-генератор зондуючого сигналу; fg - зондуючий НВЧ-сигнал; J1, J2 - струми детекторів; АЦП - аналого-цифровий перетворювач; ГІ генератор імпульсів fADC, що тактують роботу АЦП; ПК - персональний комп'ютер. Створена генератором електромагнітна хвиля проходить по хвилевідній секції, випромінюється рупорною антеною, досягає контрольованого об'єкта, відбивається від нього, приймається тією ж рупорною антеною і знов потрапляє до хвилевідної секції. Завдяки інтерференції відбитої хвилі з хвилею, що випромінюється генератором, в секції утворюється стояча хвиля. Амплітуда цієї хвилі реєструється за допо Jr1 t n r tn 6 могою двох зондів і з'єднаних з ними напівпровідникових детекторів. Через те, що зонди розташовані на відстані однієї восьмої довжини хвилі електромагнітного випромінювання один від одного, струми напівпровідникових детекторів містять два квадратурні сигнали. Сигнали напівпровідникових детекторів перетворюються у цифрову форму в аналого-цифровому перетворювачі та надходять до персонального комп'ютера, де проводиться їхня математична обробка для виділення з них квадратурних сигналів з наступним визначенням переміщення об'єкта, причому переміщення визначається з квадратурних сигналів за алгоритмом, наведеним в (Сильвиа М.Т. Обратная фильтрация геофизических временных рядов при разведке на нефть и газ / М.Т. Сильвиа, Э.А. Робинсон. - М.: Недра, 1983. - 447 с.) Для визначення переміщення об'єкта х в момент вимірювання tn,n=0, 1, 2, ..., відносно його положення в початковий момент часу t0 спочатку з виміряних струмів напівпровідникових детекторів визначається миттєве значення коефіцієнта відбиття в момент вимірювання J1 t n J t , Jr 2 t n 2 n , J10 J20 Jr1tn 12 Jr 2 tn 12 , Jr1tn Jr 2 tn J t Jr 2 tn r1 n 2 2 2 2 де J1 - виміряний струм напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом (далі - детектор 1); J2 - виміряний струм напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом (далі - детектор 2); J10 - струм детектора 1 в режимі біжучої хвилі; J20 - струм детектора 2 в режимі біжучої хвилі; Jr1 - відносний струм детектора 1; Jr2 - відносний струм детектора 2; r - коефіцієнт відбиття. Зі знайденого коефіцієнта відбиття та виміряних струмів напівпровідникових детекторів визначаються квадратурні сигнали cos t n r t n 2 1 Jr1 t n , 2r t n r t n 2 1 Jr 2 t n sin t n , 2r t n і з цих сигналів знаходиться переміщення об'єктах sin t n , sin t n 0, cos t n 0 arctg cos t n sin t n t n arctg , sin t n 0, cos t n 0, чи sin t n 0, cos t n 0 cos t n sin t n 2, sin t n 0, cos t n 0 arctg cos t n 0, n 0 t n t n 1 t n t n 1 , t n t n 1 , n 1 2,..., , , t n 1 t n t n 1 2 sgn t n t n 1 , t n t n 1 , n 1 2,..., xt n де φ - нерозгорнута фаза; θ - розгорнута фаза; в t n , n=0, 1, 2, …, 4 λв - довжина хвилі електромагнітного випромінювання генератора у вільному просторі. 7 63184 Наведена вище формула, що виражає коефіцієнт відбиття через виміряні струми напівпровідникових детекторів, є застосовною для коефіцієн1 тів відбиття, які не перевищують 0,707 , що 2 звичайно має місце при вимірюваннях у вільному просторі. Струми J10, J20 можуть бути визначені до проведення вимірювань з використанням погодженого навантаження, що забезпечує режим біжучої хвилі. Зі сказаного вище випливає, що суттєві ознаки цієї корисної моделі полягають в тому, що з виміряних струмів напівпровідникових детекторів визначається миттєве значення коефіцієнта відбиття при положенні об'єкта в момент вимірювання, квадратурні сигнали (sinφ, cosφ) визначаються зі знайденого коефіцієнта відбиття та виміряних струмів напівпровідникових детекторів без диференціювання цих струмів, і за цими сигналами визначається переміщення об'єкта. Сукупність цих суттєвих ознак забезпечує досягнення зазначеного технічного результату, а саме підвищення точності вимірювань. Це зумовлене тим, що квадратурні сигнали визначаються з виміряних струмів напівпровідникових детекторів з використанням знайденого за цими струмами миттєвого значення коефіцієнта відбиття в момент вимірювання та без диференціювання цих струмів; Jr1 t n r tn 8 перше дозволяє урахувати змінність коефіцієнта відбиття під час вимірювань, а друге виключає похибку, пов'язану з диференціюванням швидкозмінної шумової компоненти. Таким чином зазначений технічний результат (підвищення точності вимірювань) досягається тим, що в способі вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти, утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом у хвилевідній секції з двома зондами, розташованими один від одного на відстані однієї восьмої довжини хвилі електромагнітного випромінювання у хвилеводі та з'єднаними з напівпровідниковими детекторами, і математичну обробку цих квадратурних сигналів, згідно з корисною моделлю, з виміряних струмів напівпровідникових детекторів визначають миттєве значення коефіцієнта відбиття в момент вимірювання, квадратурні сигнали визначають зі знайденого коефіцієнта відбиття та виміряних струмів напівпровідникових детекторів без диференціювання цих струмів, і за цими сигналами визначають переміщення об'єкта х в момент вимірювання відносно його положення в початковий момент часу t0 за формулами J1 t n J t , Jr 2 t n 2 n , J10 J20 J t 12 Jr 2 tn 12 , Jr1tn Jr 2 tn J t Jr 2 tn r1 n r1 n 2 2 2 2 cos t n r t 2 1 Jr 2 t n r t n 2 1 Jr1 t n , sin t n n , 2r t n 2r t n sin t n , sin t n 0, cos t n 0 arctg cos t n sin t n t n arctg , sin t n 0, cos t n 0, чи sin t n 0, cos t n 0 cos t n sin t n 2, sin t n 0, cos t n 0 arctg cos t n 0, n 0 t n t n 1 t n t n 1 , t n t n 1 , n 1 2,..., , , t n 1 t n t n 1 2 sgn t n t n 1 , t n t n 1 , n 1 2,..., xt n в t n , n=0, 1, 2, …, 4 де J1 - виміряний струм напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом (далі - детектор 1); J2 - виміряний струм напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом (далі - детектор 2); J10 - струм детектора 1 в режимі біжучої хвилі; J20 - струм детектора 2 в режимі біжучої хвилі; Jr1 - відносний струм детектора 1; Jr2 - відносний струм детектора 2; r - коефіцієнт відбиття; φ - нерозгорнута фаза; θ - розгорнута фаза; t0, t1, t2, ...., tn, ..., - моменти вимірювань; n=0, 1, 2, ..., - номер вимірювання; 9 λв - довжина хвилі електромагнітного випромінювання генератора у вільному просторі; причому формула, що виражає коефіцієнт відбиття через виміряні струми напівпровідникових детекторів, є застосовною в діапазоні коефіцієнтів відбиття, обмеженому зверху величиною 1/ 2 . Для підтвердження можливості здійснення цієї корисної моделі було проведено експеримент з визначення відносного переміщення відбиваючої поверхні за виміряним струмом напівпровідникових детекторів. Вимірювання проводилися за допомогою лабораторного стенду, що складався з хвилевідної вимірювальної лінії з встановленими в ній двома зондами і з'єднаними із зондами напівпровідниковими детекторами, рупорної антени, розташованої на кінці хвилевідної лінії, НВЧгенератора, аналого-цифрового перетворювача і кривошипно-шатунного механізму з електроприводом, що приводив відбиваючу поверхню (металевий диск) у зворотно-поступальний рух співвісно з напрямком розповсюдження електромагнітної хвилі генератора по рупору. Розмах коливань диска становив 15,0 см. Довжина хвилі електромагнітного випромінювання у вільному просторі дорівнювала 3,0 см, тобто розмах коливань перевищував довжину хвилі електромагнітного випромінювання у п'ять разів. Струми напівпровідникових детекторів реєструвалися за допомогою аналого-цифрового перетворювача. Часові залежності струмів напівпровідникових детекторів 1 і 2, виміряні на протязі 1,7 с, наведені відповідно на фіг. 2 і фіг. 3. Як можна бачити, ці струми містять помітну шумову складову. На фіг. 4 наведена часова залежність відносного переміщення диска х. Суцільною лінією показано фактичне відносне переміщення, розраховане за параметрами кривошипно-шатунного механізму та частотою обертання електродвигуна, штриховою лінією показано відносне переміщення, визначене з виміряних струмів напівпровідникових детекторів запропонованим способом, і пунктирною лінією показано відносне переміщення, визначене з цих струмів за прототипом. Як можна бачити, штрихова лінія зливається із суцільною, на той час як переміщення, визначене за прототипом (пунктирна лінія), помітно відрізняється від фактичного. Для даних, наведених на фіг. 4, максимальна та середня похибка визначення розмаху коливань за прототипом становить відповідно 1,56 см (10 %) і 0,99 см (6,6 %), на той час як максимальна похибка визначення 63184 10 розмаху коливань запропонованим способом становить 0,7 мм (0,47 %). На фіг. 5 і фіг. 6 наведено часові залежності швидкості v і прискорення а диска, а саме часові залежності фактичної швидкості і прискорення (суцільні лінії), розраховані за параметрами кривошипно-шатунного механізму та частотою обертання електродвигуна, та швидкості і прискорення, отриманих з відносного переміщення, визначеного з виміряних струмів напівпровідникових детекторів запропонованим способом (штрихові лінії) та за прототипом (пунктирні криві). Ці дані також демонструють помітну перевагу запропонованого способу у точності. Таким чином розглянутий вище практичний приклад підтверджує технічний результат, що досягається використанням цієї корисної моделі - підвищення точності вимірювань. На фіг. 1 наведено структурну схему апаратної реалізації запропонованого способу. На фіг. 2 наведено виміряну часову залежність струму напівпровідникового детектора, з'єднаного із зондом, дальшим від здійснюючого зворотнопоступальний рух об'єкта. На фіг. 3 наведено виміряну часову залежність струму напівпровідникового детектора, з'єднаного із зондом, ближчим до здійснюючого зворотнопоступальний рух об'єкта. На фіг. 4 наведено часову залежність фактичного відносного переміщення здійснюючого зворотно-поступальний рух об'єкта (суцільна лінія) і відносного переміщення, визначеного за виміряними струмами напівпровідникових детекторів запропонованим способом (штрихова лінія) та за прототипом (пунктирна лінія). На фіг. 5 наведено часову залежність фактичної швидкості здійснюючого зворотнопоступальний рух об'єкта (суцільна лінія) і швидкості, отриманої з відносного переміщення, визначеного за виміряними струмами напівпровідникових детекторів запропонованим способом (штрихова лінія) та за прототипом (пунктирна лінія). На фіг. 6 наведено часову залежність фактичного прискорення здійснюючого зворотнопоступальний рух об'єкта (суцільна лінія) і прискорення, отриманого з відносного переміщення, визначеного за виміряними струмами напівпровідникових детекторів запропонованим способом (штрихова лінія) та за прототипом (пунктирна лінія). 11 63184 12 13 63184 14 15 Комп’ютерна верстка Мацело М. 63184 Підписне 16 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of parameters of motion and vibration
Автори англійськоюPylypenko Oleh Viktorovych, Horiev Mykola Borysovych, Doronin Oleksii Volodymyrovych, Kodzhespirova Inna Fedorivna, Pryvalov Yevhen Mykolaiovych
Назва патенту російськоюСпособ измерения параметров движения и вибрации
Автори російськоюПилипенко Олег Викторович, Горев Николай Борисович, Доронин Алексей Владимирович, Коджеспирова Инна Федоровна, Привалов Евгений Николаевич
МПК / Мітки
МПК: G01H 9/00
Мітки: параметрів, вимірювання, руху, вібрації, спосіб
Код посилання
<a href="https://ua.patents.su/8-63184-sposib-vimiryuvannya-parametriv-rukhu-i-vibraci.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання параметрів руху і вібрації</a>
Спосіб вимірювання параметрів руху і вібрації
Номер патенту: 55873
Опубліковано: 27.12.2010
Автори: Горєв Микола Борисович, Привалов Євген Миколайович, Коджеспірова Інна Федорівна, Пилипенко Олег Вікторович
МПК: G01H 9/00
Мітки: вібрації, спосіб, руху, параметрів, вимірювання
Формула / Реферат:
Спосіб вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти і утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом з їхньою наступною математичною обробкою, який відрізняється тим, що зазначену інтерференцію здійснюють у хвилевідній секції з двома зондами, розташованими один від одного на відстані однієї восьмої...
Спосіб вимірювання та контролю параметрів вібрації турбомашини
Номер патенту: 4721
Опубліковано: 15.02.2005
Автори: Гарагуль Анатолій Андрійович, Бойко Михайло Васильович, Жаріков Віталій Миколайович, Хвостов Костянтин Володимирович
МПК: G01M 7/02, G01M 7/00, G01H 11/00
Мітки: вібрації, контролю, вимірювання, спосіб, параметрів, турбомашині
Формула / Реферат:
Спосіб вимірювання та контролю параметрів вібрації турбомашин, за яким параметри вібрації вимірюють за допомогою датчиків віброприскорення, при цьому сигнали від датчиків віброприскорення перетворюють в цифрову форму, оброблюють за допомогою апаратно-програмного блоку, а результати відображаються в графічній формі на екрані дисплея апаратно-програмного блоку, який відрізняється тим, що вібраційні сигнали від датчиків віброприскорення або...
Пристрій для вимірювання параметрів вібрації машин
Номер патенту: 19897
Опубліковано: 25.12.1997
Автори: Поліщук Олег Федорович, Бойко Михайло Васильович, Саприкін Сергій Олексійович, Божко Олександр Євгенович
МПК: G01M 7/02
Мітки: пристрій, машин, вібрації, вимірювання, параметрів
Текст:
...между осями вибропреобразователей 1. Параметр А характеризует амплитуду малых угловых колебаний и измеряется устройством с помощью измерителя 4. Поступательные колебания S(t) с частотой f (в направлении осей вибропреобразователей 1) точки С (не показана) , расположенной между вибропреобразователями 1 на расстоянии 1/2 от каждого из них, приближенно определяются формулой S(t) = | [ s t ( t ) + S 2 (t)] = - Bcos(Ut где 1 В = ^ ^ + A^cosq»,)...
Пристрій для вимірювання і контролю параметрів вібрації машин
Номер патенту: 32472
Опубліковано: 15.12.2000
Автори: Клявлін Валерій Володимирович, Немчин Олександр Федорович
МПК: G01M 7/02
Мітки: вимірювання, контролю, машин, вібрації, пристрій, параметрів
Текст:
...(частоті обертання вала й ін.). З вихо ду фільтрів 3 сигнал надхо дить на входи інтегратора 4, який перетворює сигнал вібродатчика 1, що пропорційний віброприскоренню, у сигнал, що пропорційний віброшвидкості, який далі надходить на вхід блока усереднення 5. Блок усереднення 5 забезпечує одержання постійної напруги, пропорційної віброшвидкості. Час усереднення обирається на підста ві аналізу імпульсного ха рактеру вібропроцесів для...
Пристрій вимірювання рівнів параметрів вібрації
Номер патенту: 60661
Опубліковано: 25.06.2011
Автори: Павлишин Микола Михайлович, Шантир Діана Сергіївна, Шантир Антон Сергійович, Шантир Сергій Валерійович
МПК: G01H 1/00
Мітки: рівнів, вимірювання, вібрації, пристрій, параметрів
Формула / Реферат:
Пристрій вимірювання рівнів параметрів вібрації, який містить віброперетворювач, перестроюваний фільтр, аналого-цифровий перетворювач, блок обчислень, перетворювач середньоквадратичного значення вихід якого з'єднаний із входом індикатора, який відрізняється тим, що додатково містить блок обчислення невизначеності та другий індикатор, причому вихід віброперетворювача з'єднаний зі входом перестроюваного фільтра, вихід якого з'єднаний зі входом...
Попередній патент: Спосіб відновлення герметичності експлуатаційної колони свердловин
Наступний патент: Пристрій для тривалих статичних випробувань плитних меблевих деталей та їх з’єднань
Випадковий патент: Універсальна машина для облицювання та набивання свердловин