Спосіб та пристрій для контролю за перебігом пологів
Формула / Реферат
1. Спосіб контролю за перебігом пологів матері під час народження дитини, який включає приєднання датчика положення до заздалегідь визначеної точки на тазових кістках матері, контроль за положенням вказаного датчика положення у тривимірному просторі відносно точки відліку, та контроль за положенням частини, яка представляє плід, відносно вказаної раніше визначеної певної точки на тазових кістках матері для забезпечення визначення перебігу пологів.
2. Спосіб за п. 1, який відрізняється тим, що додатково здійснюють контроль за положенням протилежних сторін кінця шийки матки матері одна відносно одної для отримання індикації ступеня розкриття шийки матки матері.
3. Спосіб за п. 2, який відрізняється тим, що додатково здійснюють контроль за положенням протилежних сторін кінця шийки матки матері відносно частини, яка представляє плід, та тазових кісток матері для забезпечення індикації положення шийки матки матері.
4. Спосіб за будь-яким з пунктів 2 або 3, який відрізняється тим, що положення частини, яка представляє плід, контролюють шляхом прикріплення другого датчика положення на зовнішній кінець частини, яка представляє плід, та контролю за положенням вказаного другого датчика положення.
5. Спосіб за п. 4, який відрізняється тим, що положення протилежних країв кінця шийки матки контролюють шляхом прикріплення третього і четвертого датчиків положення і контролю їх відповідних положень.
6. Спосіб за п. 4, який відрізняється тим, що положення частини, яка представляє плід, безперервно індицирують, здійснюючи безперервний контроль за положенням третього та четвертого датчиків положення та безперервно відображаючи просторову відстань між ними.
7. Спосіб за п. 6, який відрізняється тим, що ступінь розкриття шийки матки матері безперервно визначають, здійснюючи безперервний контроль за положенням третього та четвертого датчиків положення та безперервно відображаючи просторову відстань між ними.
8. Спосіб за п. 7, який відрізняється тим, що ступінь розкриття шийки матки матері і положення обчислюють та виражають у сантиметрах.
9. Спосіб за п. 7, який відрізняється тим, що ступінь розкриття шийки матки матері і положення обчислюють та відображають у вигляді партограми, яка показує співвідношення між ступенем розкриття шийкиматки матері і опусканням частини, яка представляє плід.
10. Спосіб за будь-яким з пунктів 5-9, який відрізняється тим, що ступінь згладжування шийки матки матері безперервно визначають і контролюють, здійснюючи безперервний контроль і відображаючи просторову відстань другого датчика положення від третього та четвертого датчиків положення.
11. Спосіб за будь-яким з пунктів 5-10, який відрізняється тим, що положення шийки матки матері безперервно визначають, здійснюючи безперервний контроль і відображаючи просторову відстань між вказаними першим, другим, третім та четвертим датчиками положення.
12. Спосіб за п. 11, який відрізняється тим, що згладжування і положення шийки матки матері обчислюють та виражають у сантиметрах.
13. Спосіб за будь-яким з пунктів 5-10, який відрізняється тим, що положення шийки матки матері безперервно визначають, здійснюючи безперервний контроль і відображаючи кут нахилу осі шийки матки, використовуючи сигнали другого, третього та четвертого датчиків положення.
14. Спосіб за п. 1, який відрізняється тим, що положення частини, яка представляє плід, контролюють шляхом прикріплення датчика положення до ультразвукового перетворювача, причому вказаний ультразвуковий перетворювач використовують для отримання зображення частини, яка представляє плід, на екрані, і контролюючи положення цього датчика положення і, таким чином, положення вказаного ультразвукового перетворювача, до якого він прикріплений, і визначають положення частини, яка представляє плід, у вигляді зображення на екрані.
15. Спосіб за п. 14, який відрізняється тим, що положення, які контролюються, першого датчика положення і частини, яка представляє плід, обробляють так, що отримують індикацію просторової відстані міжтім'яного (МТД) діаметра голівки плода відносно вхідного отвору таза матері.
16. Спосіб за будь-яким з пунктів 1-15, який відрізняється тим, що перед прикріпленням датчика положення в раніше визначену точку на тазових кістках матері для контролю за їх положенням складають схему всього просторового положення таза матері.
17. Спосіб за п. 16, який відрізняється тим, що схему таза матері складають шляхом прикріплення датчика положення до однієї заздалегідь визначеної точки на тазі і отримання вихідного електричного сигналу, який ідентифікує місцезнаходження першої точки, прикріплення датчика положення до другої заздалегідь визначеної точки на тазі і отримання електричного сигналу, який ідентифікує місцезнаходження другої точки, прикріплення датчика положення до третьої заздалегідь визначеної точки на тазі і отримання вихідного електричного сигналу, який ідентифікує місцезнаходження вказаної точки, і обробки вказаних першого, другого та третього електричних сигналів для обчислення загального просторового положення таза.
18. Спосіб за п. 17, який відрізняється тим, що вказана перша точка є лівою передньою верхньою остю, друга точка є центральною точкою лобкового симфізу, і третя точка є правою передньою верхньою остю.
19. Спосіб за п. 17 або 18, який відрізняється тим, що після складання схеми загального просторового положення таза датчик положення в третій точці залишають прикріпленим до третьої точки, при цьому його положення контролюють під час пологів матері.
20. Спосіб за будь-яким з пунктів 5-19, який відрізняється тим, що вимірюють скорочення шийки матки матері і вимірюють частоту серцебиття плода, які виражають відносно скорочень матки.
21. Спосіб за п. 20, який відрізняється тим, що скорочення шийки матки матері визначають шляхом контролю другого, третього та четвертого датчиків положення при індикації ними змін положення частини, яка представляє плід, і шийки матки.
22. Пристрій для контролю за перебігом пологів, який має датчик положення, призначений для приєднання до раніше визначеної точки на тазових кістках матері, і отримання вихідного сигналу, що ідентифікує його просторове положення, засіб визначення положення частини, яка представляє плід, відносно раніше вказаної визначеної точки на тазових кістках матері, і отримання вихідного сигналу, що ідентифікує положення вказаної частини, яка представляє плід, комп'ютер, який приєднаний з можливістю прийому вказаних вихідних сигналів, і вихідний пристрій, який керується комп'ютером для виведення показників положення частини, яка представляє плід, відносно раніше визначеної точки тазових кісток матері.
23. Пристрій за п. 22, який відрізняється тим, що додатково містить засіб визначення положення протилежних сторін шийки матки матері одна відносно одної і отримання вихідних сигналів, який з'єднаний з комп'ютером, пристосованим для оброблення сигналів і управління вихідним пристроєм, який призначений для виведення показників ступеня розкриття шийки матки матері.
24. Пристрій за п. 23, який відрізняється тим, що додатково містить засіб визначення положення протилежних сторін шийки матки матері відносно частини, яка представляє плід, і тазових кісток матері і отримання вихідних сигналів, який з'єднаний з комп'ютером, пристосованим для обробки цих сигналів і управління вихідним пристроєм для виводу індикації положення шийки матки матері.
25. Пристрій за п. 23 або 24, який відрізняється тим, що засіб визначення положення частини, яка представляє плід, відносно раніше визначеної точки на тазових кістках матері має другий датчик положення, який призначений для приєднання до маківки голівки плода для отримання вихідного сигналу, який з'єднаний з комп'ютером, що ідентифікує положення вказаного другого датчика положення.
26. Пристрій за п. 25, який відрізняється тим, що засоби визначення положення протилежних країв шийки матки матері включають третій та четвертий датчики положення, які призначені для приєднання до протилежних країв шийки матки матері і отримання вихідного сигналу, який з'єднаний з комп'ютером, що ідентифікує їх взаємне положення.
27. Пристрій за п. 26, який відрізняється тим, що комп'ютер виконаний з можливістю обчислення, а вихідний пристрій з можливістю відображення положення частини, яка представляє плід, як просторової відстані між першим і другим датчиками положення.
28. Пристрій за п. 27, який відрізняється тим, що комп'ютер виконаний з можливістю обчислення, а вихідний пристрій з можливістю відображення ступеня розкриття шийки матки жінки, як просторової відстані між третім та четвертим датчиками положення.
29. Пристрій за п. 28, який відрізняється тим, що комп'ютер виконаний з можливістю обчислення, а вихідний пристрій з можливістю відображення ступеня розкриття матки і вказаного положення в сантиметрах.
30. Пристрій за п. 28, який відрізняється тим, що комп'ютер виконаний з можливістю обчислення, а вихідний пристрій з можливістю відображення ступеня розкриття шийки матки і положення у формі партограми, яка показує взаємозалежність ступеня розкриття шийки матки і ступеня опускання частини, яка представляє плід.
31. Пристрій за будь-яким з пунктів 26-30, який відрізняється тим, що комп'ютер виконаний з можливістю обчислення, а вихідний пристрій з можливістю відображення ступеня згладжування шийки матки матері як просторової відстані другого датчика положення від третього та четвертого датчиків положення.
32. Пристрій за будь-яким з пунктів 26-31, який відрізняється тим, що комп'ютер виконаний з можливістю обчислення, а вихідний пристрій з можливістю відображення положення шийки матки матері як просторової відстані між першим, другим, третім та четвертим датчиками положення.
33. Пристрій за п. 32, який відрізняється тим, що ступінь згладжування і положення шийки матки матері обчислюються і виражаються в сантиметрах.
34. Пристрій за будь-яким з пунктів 26-31, який відрізняється тим, що комп'ютер виконаний з можливістю обчислення, а вихідний пристрій з можливістю відображення кута осі шийки матки, який індукується другим, третім та четвертим датчиками положення.
35. Пристрій за п. 23 або 24, який відрізняється тим, що засоби визначення положення частини, яка представляє плід, і протилежних сторін шийки матки матері мають ультразвуковий перетворювач, який призначений для отримання зображення частини, яка представляє плід, та шийки матки на екрані, датчик положення, який приєднаний до вказаного ультразвукового перетворювача з забезпеченням отримання вихідного сигналу, що ідентифікує його положення на комп'ютері, і маркер, який призначений для позначення вибраної точки на частині, яка представляє плід, і протилежних сторонах шийки матки матері, які представлені у вигляді зображення на екрані, і для виводу електричного сигналу, що ідентифікує їх відповідне положення, на комп'ютер.
36. Пристрій за п. 35, який відрізняється тим, що маркер виконаний з можливістю позначення міжтім'яного діаметра (МТД) голівки плода, що зображена на екрані, а комп'ютер пристосований для обчислення відстані між МТД і вхідним отвором таза матері.
Текст
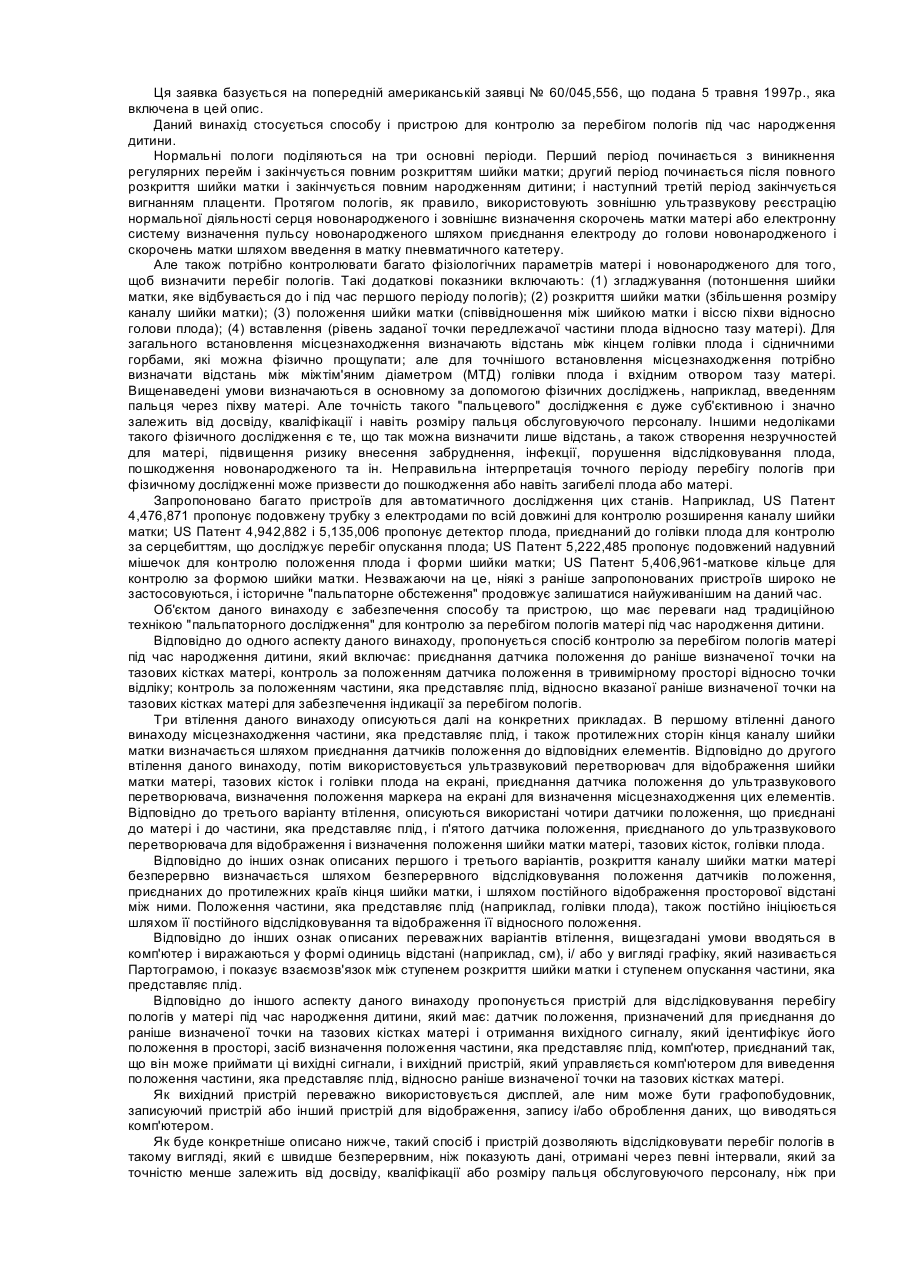
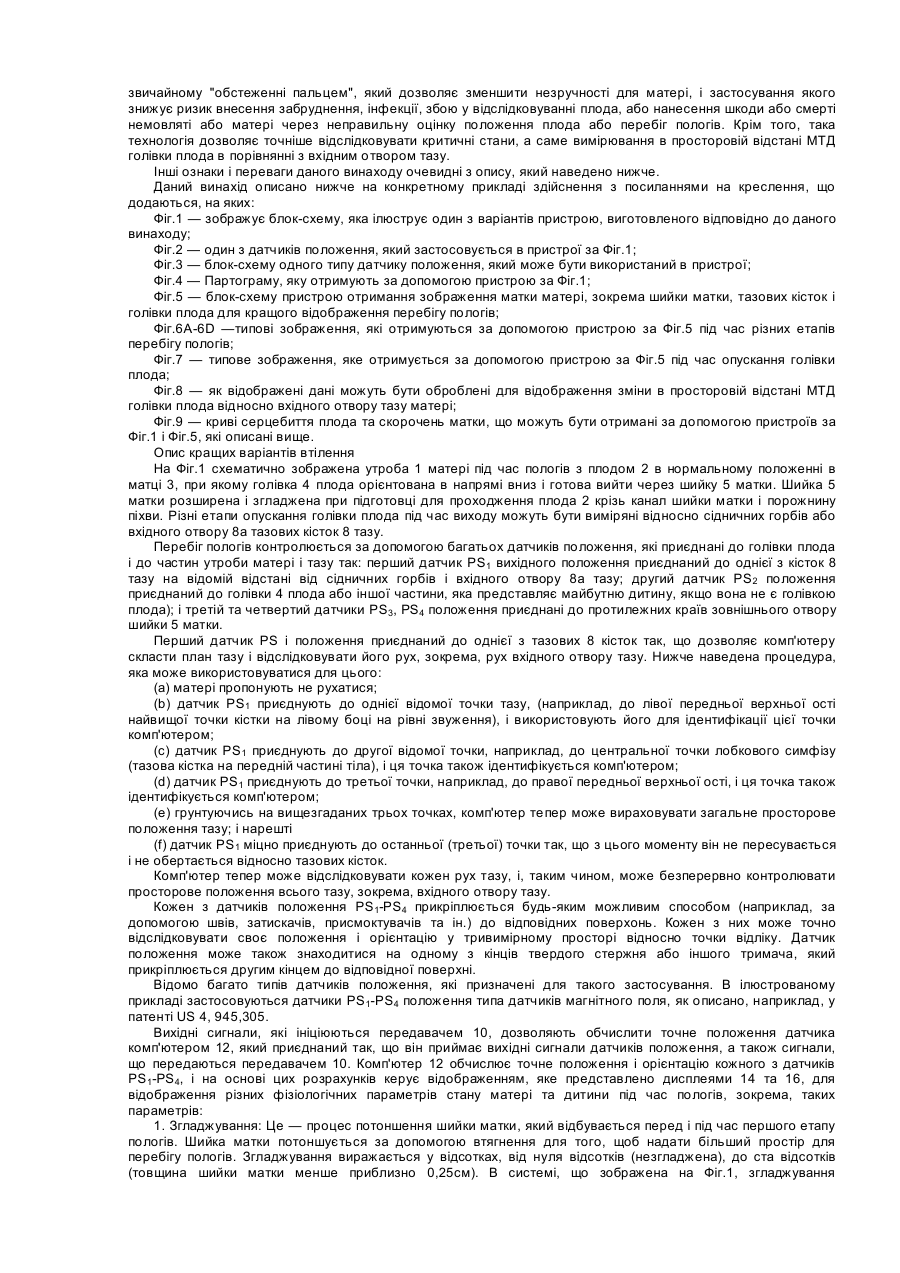
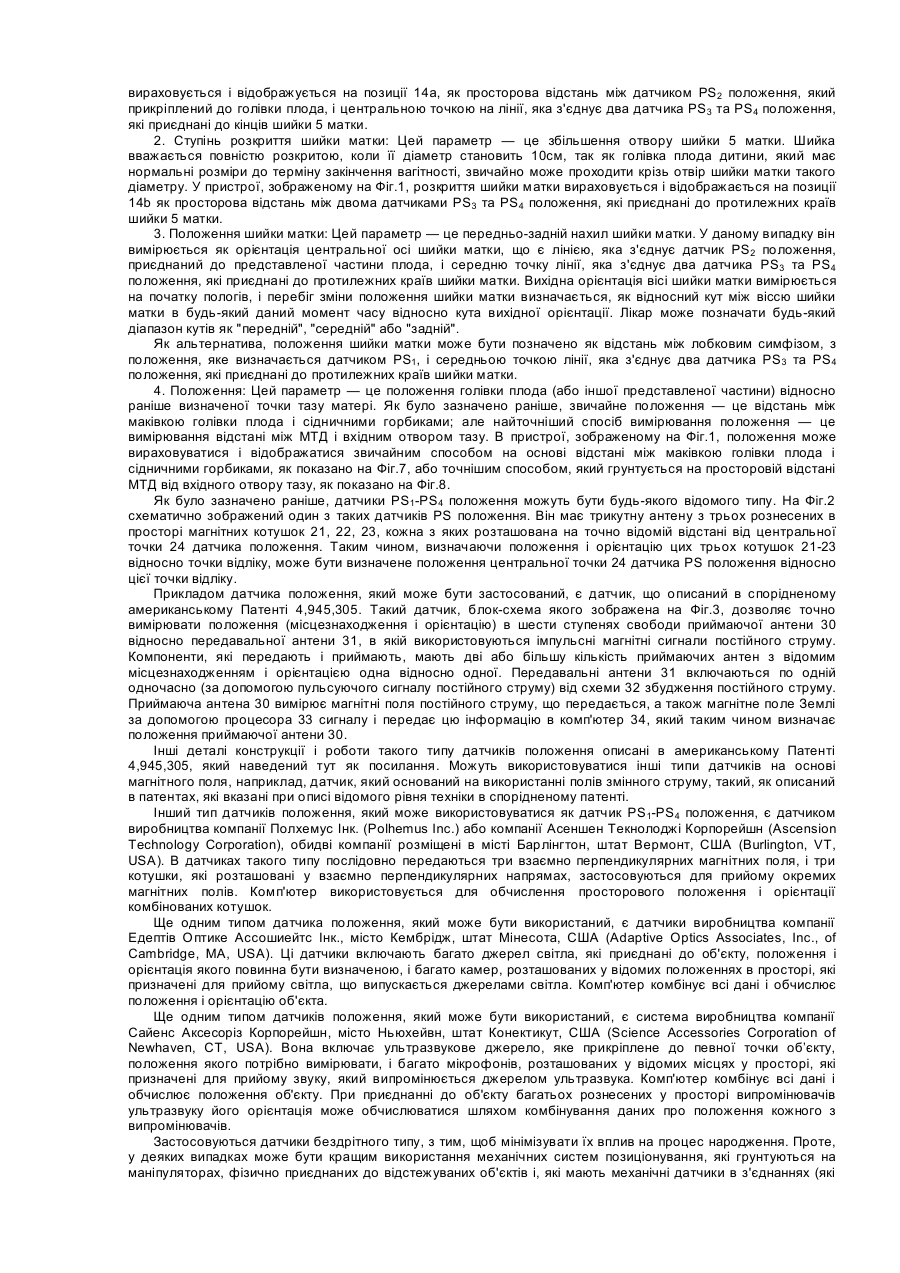
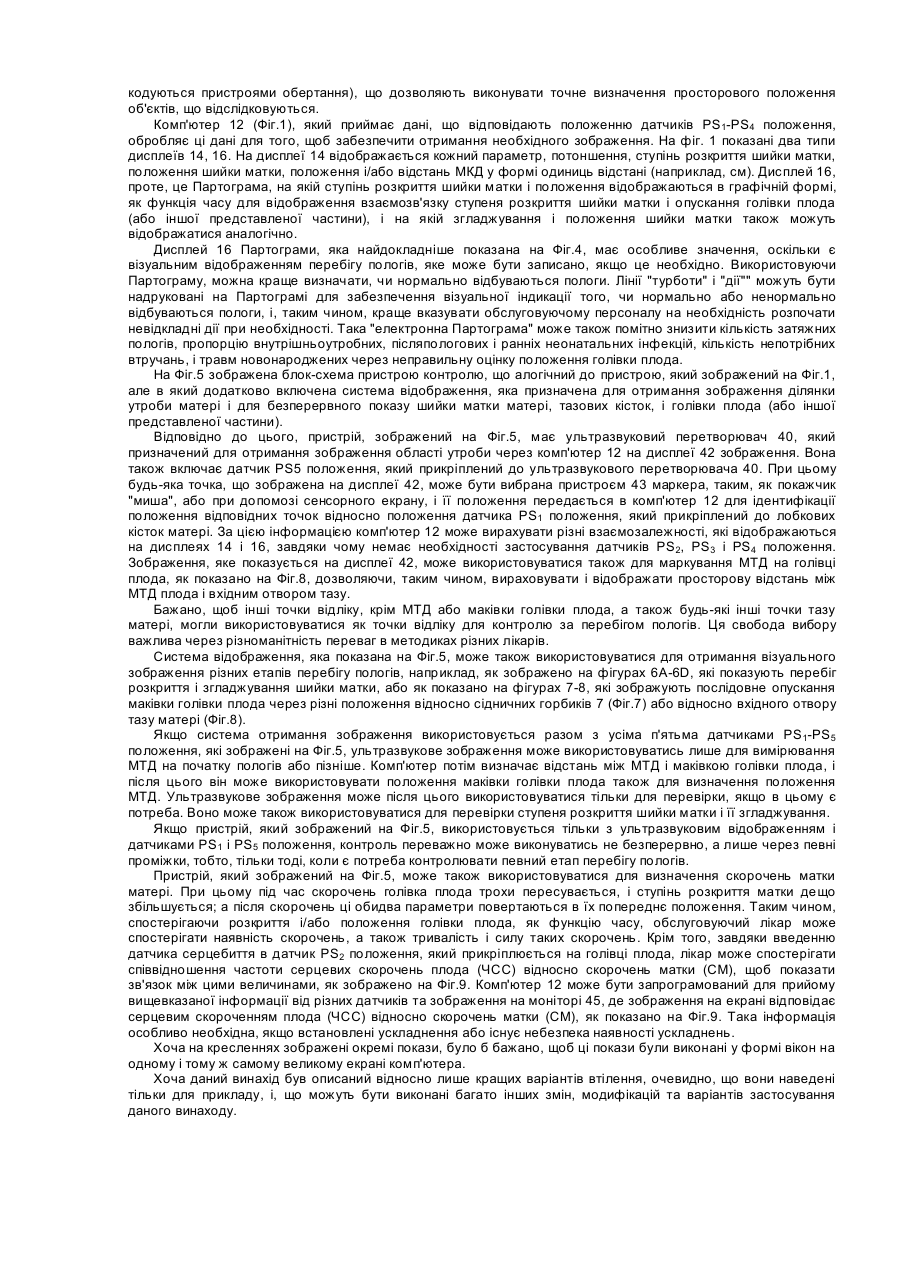
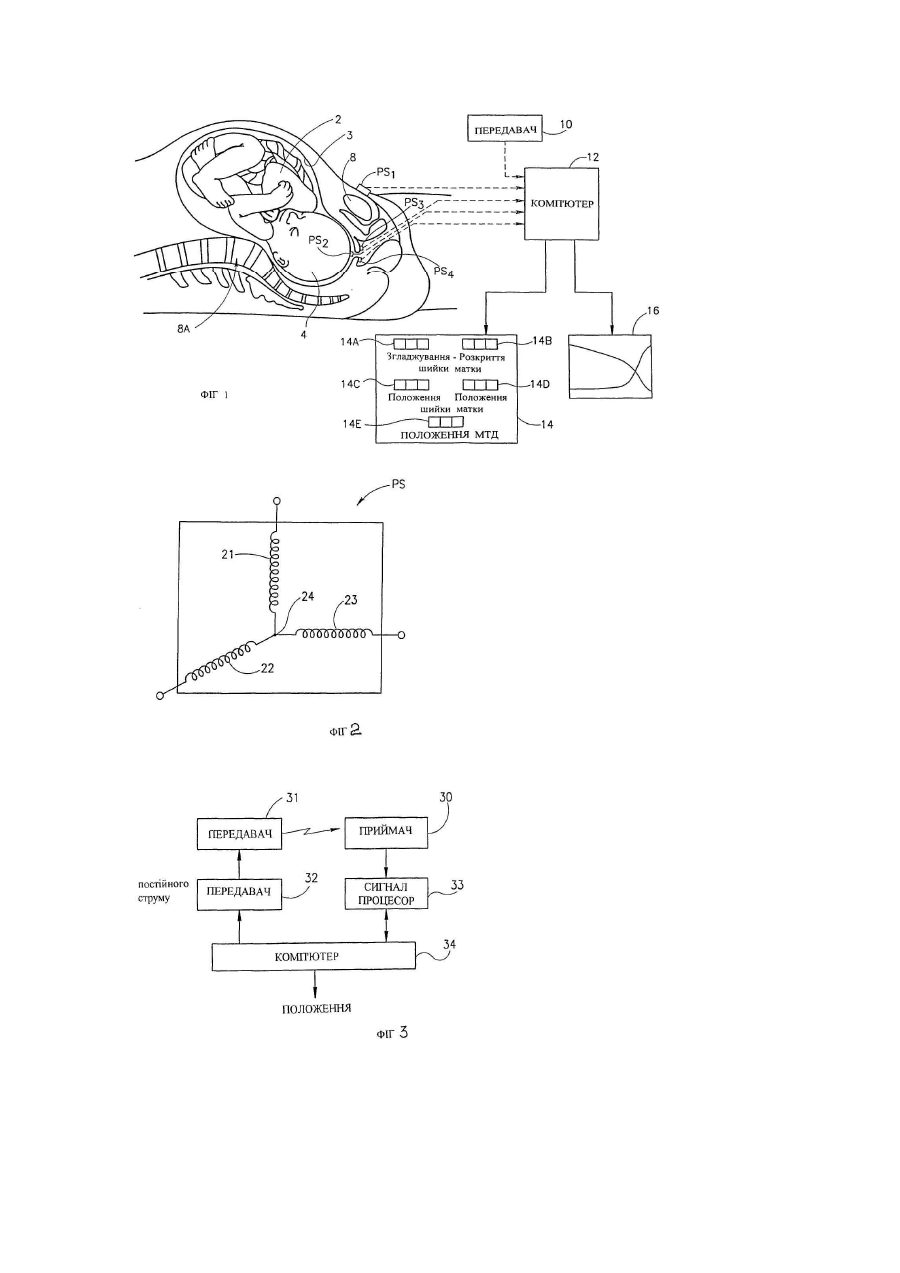
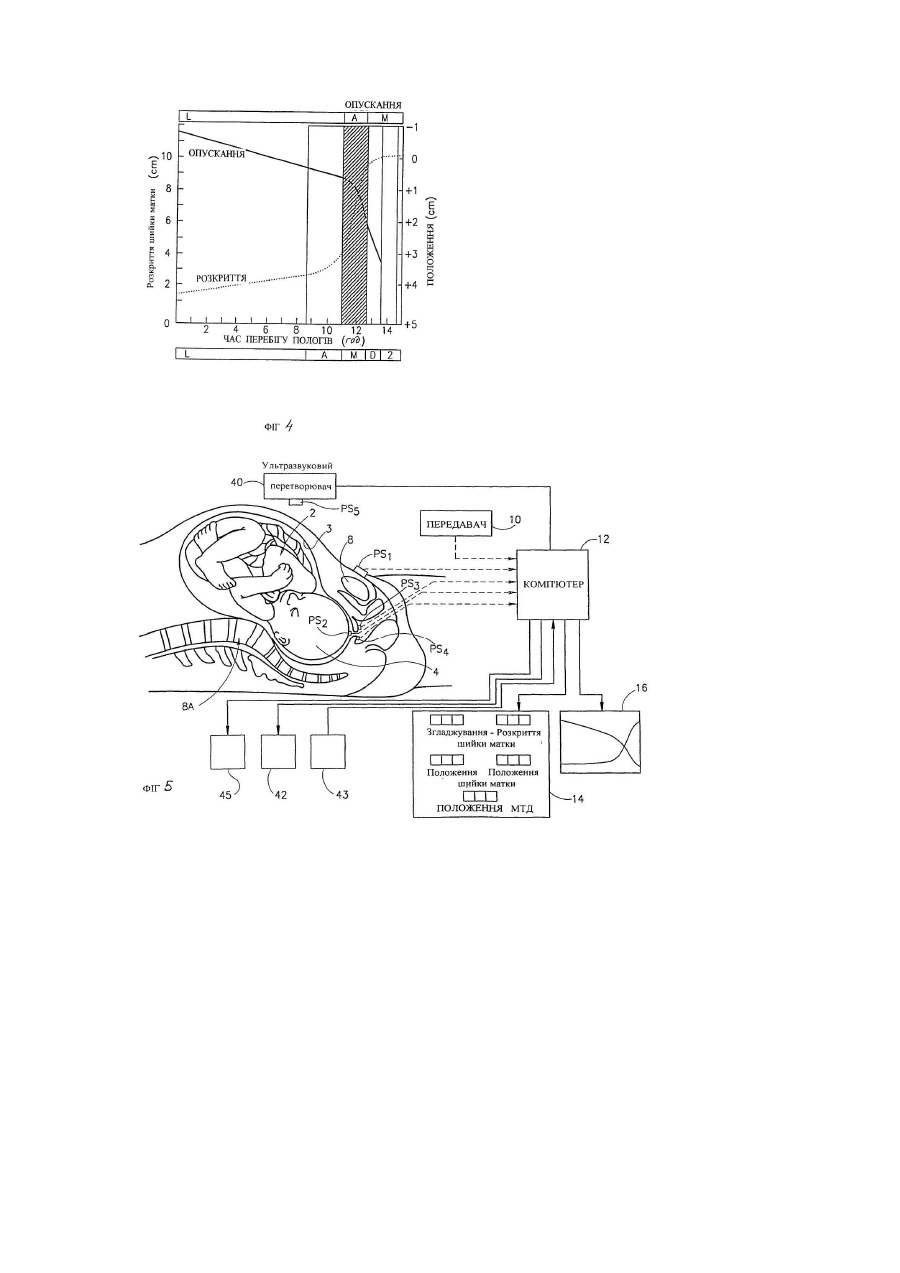
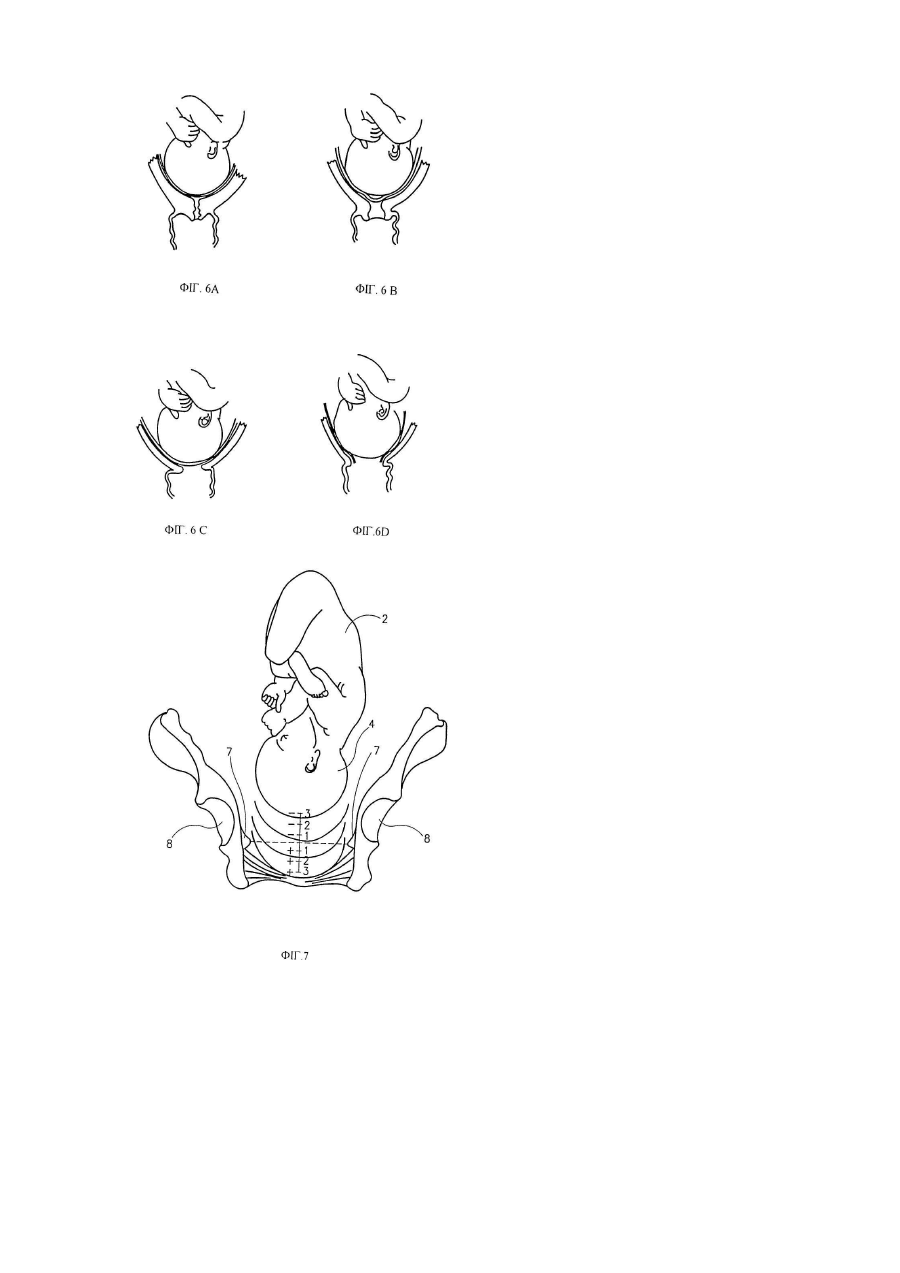
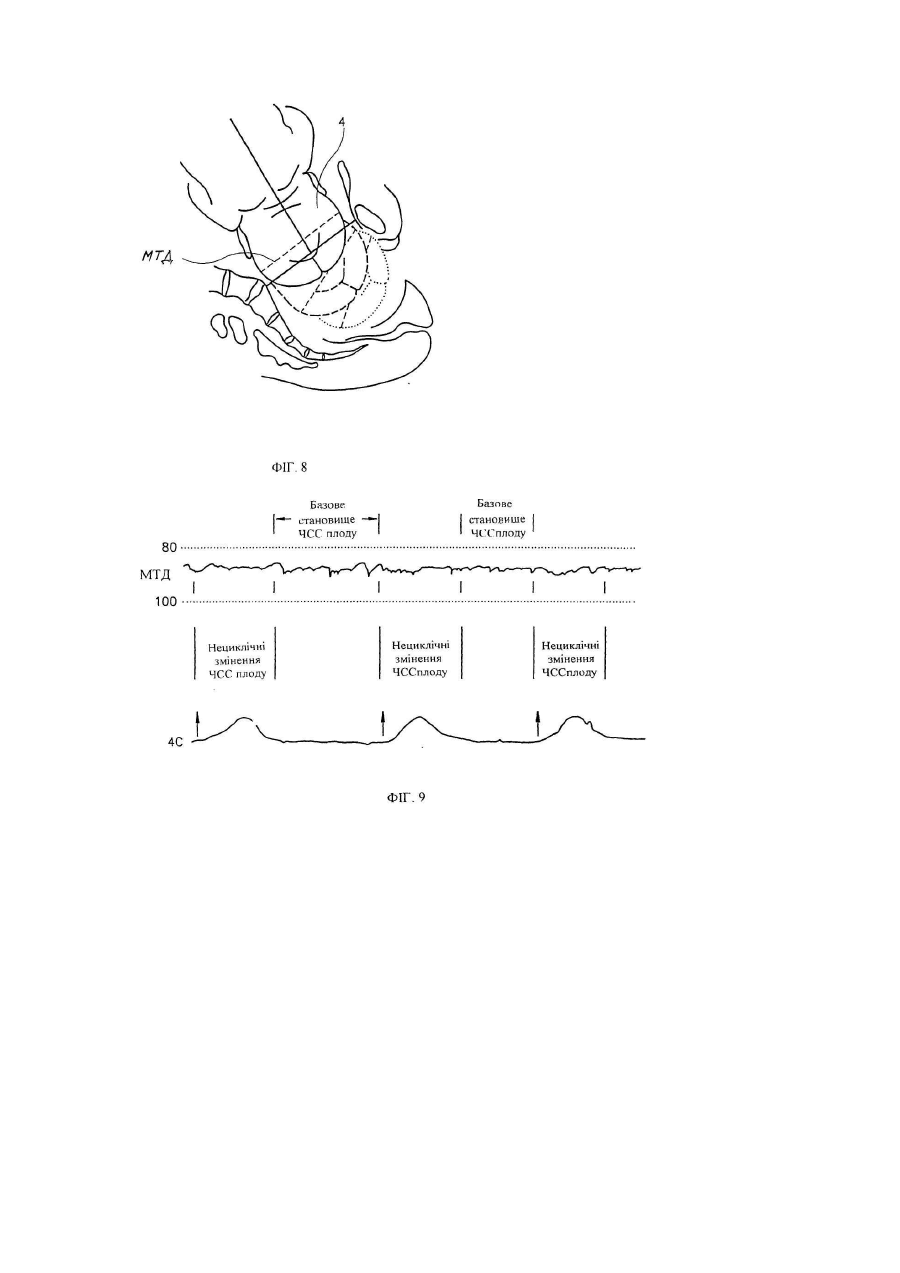
Ця заявка базується на попередній американській заявці № 60/045,556, що подана 5 травня 1997р., яка включена в цей опис. Даний винахід стосується способу і пристрою для контролю за перебігом пологів під час народження дитини. Нормальні пологи поділяються на три основні періоди. Перший період починається з виникнення регулярних перейм і закінчується повним розкриттям шийки матки; другий період починається після повного розкриття шийки матки і закінчується повним народженням дитини; і наступний третій період закінчується вигнанням плаценти. Протягом пологів, як правило, використовують зовнішню ультразвукову реєстрацію нормальної діяльності серця новонародженого і зовнішнє визначення скорочень матки матері або електронну систему визначення пульсу новонародженого шляхом приєднання електроду до голови новонародженого і скорочень матки шляхом введення в матку пневматичного катетеру. Але також потрібно контролювати багато фізіологічних параметрів матері і новонародженого для того, щоб визначити перебіг пологів. Такі додаткові показники включають: (1) згладжування (потоншення шийки матки, яке відбувається до і під час першого періоду пологів); (2) розкриття шийки матки (збільшення розміру каналу шийки матки); (3) положення шийки матки (співвідношення між шийкою матки і віссю піхви відносно голови плода); (4) вставлення (рівень заданої точки передлежачої частини плода відносно тазу матері). Для загального встановлення місцезнаходження визначають відстань між кінцем голівки плода і сідничними горбами, які можна фізично прощупати; але для точнішого встановлення місцезнаходження потрібно визначати відстань між міжтім'яним діаметром (МТД) голівки плода і вхідним отвором тазу матері. Вищенаведені умови визначаються в основному за допомогою фізичних досліджень, наприклад, введенням пальця через піхву матері. Але точність такого "пальцевого" дослідження є дуже суб'єктивною і значно залежить від досвіду, кваліфікації і навіть розміру пальця обслуговуючого персоналу. Іншими недоліками такого фізичного дослідження є те, що так можна визначити лише відстань, а також створення незручностей для матері, підвищення ризику внесення забруднення, інфекції, порушення відслідковування плода, пошкодження новонародженого та ін. Неправильна інтерпретація точного періоду перебігу пологів при фізичному дослідженні може призвести до пошкодження або навіть загибелі плода або матері. Запропоновано багато пристроїв для автоматичного дослідження цих станів. Наприклад, US Патент 4,476,871 пропонує подовжену трубку з електродами по всій довжині для контролю розширення каналу шийки матки; US Патент 4,942,882 і 5,135,006 пропонує детектор плода, приєднаний до голівки плода для контролю за серцебиттям, що досліджує перебіг опускання плода; US Патент 5,222,485 пропонує подовжений надувний мішечок для контролю положення плода і форми шийки матки; US Патент 5,406,961-маткове кільце для контролю за формою шийки матки. Незважаючи на це, ніякі з раніше запропонованих пристроїв широко не застосовуються, і історичне "пальпаторне обстеження" продовжує залишатися найуживанішим на даний час. Об'єктом даного винаходу є забезпечення способу та пристрою, що має переваги над традиційною технікою "пальпаторного дослідження" для контролю за перебігом пологів матері під час народження дитини. Відповідно до одного аспекту даного винаходу, пропонується спосіб контролю за перебігом пологів матері під час народження дитини, який включає: приєднання датчика положення до раніше визначеної точки на тазових кістках матері, контроль за положенням датчика положення в тривимірному просторі відносно точки відліку; контроль за положенням частини, яка представляє плід, відносно вказаної раніше визначеної точки на тазових кістках матері для забезпечення індикації за перебігом пологів. Три втілення даного винаходу описуються далі на конкретних прикладах. В першому втіленні даного винаходу місцезнаходження частини, яка представляє плід, і також протилежних сторін кінця каналу шийки матки визначається шляхом приєднання датчиків положення до відповідних елементів. Відповідно до другого втілення даного винаходу, потім використовується ультразвуковий перетворювач для відображення шийки матки матері, тазових кісток і голівки плода на екрані, приєднання датчика положення до ультразвукового перетворювача, визначення положення маркера на екрані для визначення місцезнаходження цих елементів. Відповідно до третього варіанту втілення, описуються використані чотири датчики положення, що приєднані до матері і до частини, яка представляє плід, і п'ятого датчика положення, приєднаного до ультразвукового перетворювача для відображення і визначення положення шийки матки матері, тазових кісток, голівки плода. Відповідно до інших ознак описаних першого і третього варіантів, розкриття каналу шийки матки матері безперервно визначається шляхом безперервного відслідковування положення датчиків положення, приєднаних до протилежних країв кінця шийки матки, і шляхом постійного відображення просторової відстані між ними. Положення частини, яка представляє плід (наприклад, голівки плода), також постійно ініціюється шляхом її постійного відслідковування та відображення її відносного положення. Відповідно до інших ознак описаних переважних варіантів втілення, вищезгадані умови вводяться в комп'ютер і виражаються у формі одиниць відстані (наприклад, см), і/ або у вигляді графіку, який називається Партограмою, і показує взаємозв'язок між ступенем розкриття шийки матки і ступенем опускання частини, яка представляє плід. Відповідно до іншого аспекту даного винаходу пропонується пристрій для відслідковування перебігу пологів у матері під час народження дитини, який має: датчик положення, призначений для приєднання до раніше визначеної точки на тазових кістках матері і отримання вихідного сигналу, який ідентифікує його положення в просторі, засіб визначення положення частини, яка представляє плід, комп'ютер, приєднаний так, що він може приймати ці вихідні сигнали, і вихідний пристрій, який управляється комп'ютером для виведення положення частини, яка представляє плід, відносно раніше визначеної точки на тазових кістках матері. Як вихідний пристрій переважно використовується дисплей, але ним може бути графопобудовник, записуючий пристрій або інший пристрій для відображення, запису і/або оброблення даних, що виводяться комп'ютером. Як буде конкретніше описано нижче, такий спосіб і пристрій дозволяють відслідковувати перебіг пологів в такому вигляді, який є швидше безперервним, ніж показують дані, отримані через певні інтервали, який за точністю менше залежить від досвіду, кваліфікації або розміру пальця обслуговуючого персоналу, ніж при звичайному "обстеженні пальцем", який дозволяє зменшити незручності для матері, і застосування якого знижує ризик внесення забруднення, інфекції, збою у відслідковуванні плода, або нанесення шкоди або смерті немовляті або матері через неправильну оцінку положення плода або перебіг пологів. Крім того, така технологія дозволяє точніше відслідковувати критичні стани, а саме вимірювання в просторовій відстані МТД голівки плода в порівнянні з вхідним отвором тазу. Інші ознаки і переваги даного винаходу очевидні з опису, який наведено нижче. Даний винахід описано нижче на конкретному прикладі здійснення з посиланнями на креслення, що додаються, на яких: Фіг.1 — зображує блок-схему, яка ілюструє один з варіантів пристрою, виготовленого відповідно до даного винаходу; Фіг.2 — один з датчиків положення, який застосовується в пристрої за Фіг.1; Фіг.3 — блок-схему одного типу датчику положення, який може бути використаний в пристрої; Фіг.4 — Партограму, яку отримують за допомогою пристрою за Фіг.1; Фіг.5 — блок-схему пристрою отримання зображення матки матері, зокрема шийки матки, тазових кісток і голівки плода для кращого відображення перебігу пологів; Фіг.6А-6D —типові зображення, які отримуються за допомогою пристрою за Фіг.5 під час різних етапів перебігу пологів; Фіг.7 — типове зображення, яке отримується за допомогою пристрою за Фіг.5 під час опускання голівки плода; Фіг.8 — як відображені дані можуть бути оброблені для відображення зміни в просторовій відстані МТД голівки плода відносно вхідного отвору тазу матері; Фіг.9 — криві серцебиття плода та скорочень матки, що можуть бути отримані за допомогою пристроїв за Фіг.1 і Фіг.5, які описані вище. Опис кращих варіантів втілення На Фіг.1 схематично зображена утроба 1 матері під час пологів з плодом 2 в нормальному положенні в матці 3, при якому голівка 4 плода орієнтована в напрямі вниз і готова вийти через шийку 5 матки. Шийка 5 матки розширена і згладжена при підготовці для проходження плода 2 крізь канал шийки матки і порожнину піхви. Різні етапи опускання голівки плода під час виходу можуть бути виміряні відносно сідничних горбів або вхідного отвору 8а тазових кісток 8 тазу. Перебіг пологів контролюється за допомогою багатьох датчиків положення, які приєднані до голівки плода і до частин утроби матері і тазу так: перший датчик PS1 вихідного положення приєднаний до однієї з кісток 8 тазу на відомій відстані від сідничних горбів і вхідного отвору 8а тазу; другий датчик PS2 положення приєднаний до голівки 4 плода або іншої частини, яка представляє майбутню дитину, якщо вона не є голівкою плода); і третій та четвертий датчики PS3, PS4 положення приєднані до протилежних країв зовнішнього отвору шийки 5 матки. Перший датчик PS і положення приєднаний до однієї з тазових 8 кісток так, що дозволяє комп'ютеру скласти план тазу і відслідковувати його рух, зокрема, рух вхідного отвору тазу. Нижче наведена процедура, яка може використовуватися для цього: (а) матері пропонують не рухатися; (b) датчик PS1 приєднують до однієї відомої точки тазу, (наприклад, до лівої передньої верхньої ості найвищої точки кістки на лівому боці на рівні звуження), і використовують його для ідентифікації цієї точки комп'ютером; (c) датчик PS1 приєднують до другої відомої точки, наприклад, до центральної точки лобкового симфізу (тазова кістка на передній частині тіла), і ця точка також ідентифікується комп'ютером; (d) датчик PS1 приєднують до третьої точки, наприклад, до правої передньої верхньої ості, і ця точка також ідентифікується комп'ютером; (е) грунтуючись на вищезгаданих трьох точках, комп'ютер тепер може вираховувати загальне просторове положення тазу; і нарешті (f) датчик PS1 міцно приєднують до останньої (третьої) точки так, що з цього моменту він не пересувається і не обертається відносно тазових кісток. Комп'ютер тепер може відслідковувати кожен рух тазу, і, таким чином, може безперервно контролювати просторове положення всього тазу, зокрема, вхідного отвору тазу. Кожен з датчиків положення PS1-PS4 прикріплюється будь-яким можливим способом (наприклад, за допомогою швів, затискачів, присмоктувачів та ін.) до відповідних поверхонь. Кожен з них може точно відслідковувати своє положення і орієнтацію у тривимірному просторі відносно точки відліку. Датчик положення може також знаходитися на одному з кінців твердого стержня або іншого тримача, який прикріплюється другим кінцем до відповідної поверхні. Відомо багато типів датчиків положення, які призначені для такого застосування. В ілюстрованому прикладі застосовуються датчики PS1-PS4 положення типа датчиків магнітного поля, як описано, наприклад, у патенті US 4, 945,305. Вихідні сигнали, які ініціюються передавачем 10, дозволяють обчислити точне положення датчика комп'ютером 12, який приєднаний так, що він приймає вихідні сигнали датчиків положення, а також сигнали, що передаються передавачем 10. Комп'ютер 12 обчислює точне положення і орієнтацію кожного з датчиків PS1-PS4, і на основі цих розрахунків керує відображенням, яке представлено дисплеями 14 та 16, для відображення різних фізіологічних параметрів стану матері та дитини під час пологів, зокрема, таких параметрів: 1. Згладжування: Це — процес потоншення шийки матки, який відбувається перед і під час першого етапу пологів. Шийка матки потоншується за допомогою втягнення для того, щоб надати більший простір для перебігу пологів. Згладжування виражається у відсотках, від нуля відсотків (незгладжена), до ста відсотків (товщина шийки матки менше приблизно 0,25см). В системі, що зображена на Фіг.1, згладжування вираховується і відображується на позиції 14а, як просторова відстань між датчиком PS2 положення, який прикріплений до голівки плода, і центральною точкою на лінії, яка з'єднує два датчика PS3 та PS4 положення, які приєднані до кінців шийки 5 матки. 2. Ступінь розкриття шийки матки: Цей параметр — це збільшення отвору шийки 5 матки. Шийка вважається повністю розкритою, коли її діаметр становить 10см, так як голівка плода дитини, який має нормальні розміри до терміну закінчення вагітності, звичайно може проходити крізь отвір шийки матки такого діаметру. У пристрої, зображеному на Фіг.1, розкриття шийки матки вираховується і відображається на позиції 14b як просторова відстань між двома датчиками PS3 та PS4 положення, які приєднані до протилежних країв шийки 5 матки. 3. Положення шийки матки: Цей параметр — це передньо-задній нахил шийки матки. У даному випадку він вимірюється як орієнтація центральної осі шийки матки, що є лінією, яка з'єднує датчик PS2 положення, приєднаний до представленої частини плода, і середню точку лінії, яка з'єднує два датчика PS3 та PS4 положення, які приєднані до протилежних країв шийки матки. Вихідна орієнтація вісі шийки матки вимірюється на початку пологів, і перебіг зміни положення шийки матки визначається, як відносний кут між віссю шийки матки в будь-який даний момент часу відносно кута вихідної орієнтації. Лікар може позначати будь-який діапазон кутів як "передній", "середній" або "задній". Як альтернатива, положення шийки матки може бути позначено як відстань між лобковим симфізом, з положення, яке визначається датчиком PS1, і середньою точкою лінії, яка з'єднує два датчика PS3 та PS4 положення, які приєднані до протилежних країв шийки матки. 4. Положення: Цей параметр — це положення голівки плода (або іншої представленої частини) відносно раніше визначеної точки тазу матері. Як було зазначено раніше, звичайне положення — це відстань між маківкою голівки плода і сідничними горбиками; але найточніший спосіб вимірювання положення — це вимірювання відстані між МТД і вхідним отвором тазу. В пристрої, зображеному на Фіг.1, положення може вираховуватися і відображатися звичайним способом на основі відстані між маківкою голівки плода і сідничними горбиками, як показано на Фіг.7, або точнішим способом, який грунтується на просторовій відстані МТД від вхідного отвору тазу, як показано на Фіг.8. Як було зазначено раніше, датчики PS1-PS4 положення можуть бути будь-якого відомого типу. На Фіг.2 схематично зображений один з таких датчиків PS положення. Він має трикутну антену з трьох рознесених в просторі магнітних котушок 21, 22, 23, кожна з яких розташована на точно відомій відстані від центральної точки 24 датчика положення. Таким чином, визначаючи положення і орієнтацію цих трьох котушок 21-23 відносно точки відліку, може бути визначене положення центральної точки 24 датчика PS положення відносно цієї точки відліку. Прикладом датчика положення, який може бути застосований, є датчик, що описаний в спорідненому американському Патенті 4,945,305. Такий датчик, блок-схема якого зображена на Фіг.3, дозволяє точно вимірювати положення (місцезнаходження і орієнтацію) в шести ступенях свободи приймаючої антени 30 відносно передавальної антени 31, в якій використовуються імпульсні магнітні сигнали постійного струму. Компоненти, які передають і приймають, мають дві або більшу кількість приймаючих антен з відомим місцезнаходженням і орієнтацією одна відносно одної. Передавальні антени 31 включаються по одній одночасно (за допомогою пульсуючого сигналу постійного струму) від схеми 32 збудження постійного струму. Приймаюча антена 30 вимірює магнітні поля постійного струму, що передається, а також магнітне поле Землі за допомогою процесора 33 сигналу і передає цю інформацію в комп'ютер 34, який таким чином визначає положення приймаючої антени 30. Інші деталі конструкції і роботи такого типу датчиків положення описані в американському Патенті 4,945,305, який наведений тут як посилання. Можуть використовуватися інші типи датчиків на основі магнітного поля, наприклад, датчик, який оснований на використанні полів змінного струму, такий, як описаний в патентах, які вказані при описі відомого рівня техніки в спорідненому патенті. Інший тип датчиків положення, який може використовуватися як датчик PS1-PS4 положення, є датчиком виробництва компанії Полхемус Інк. (Polhemus Inc.) або компанії Асеншен Текнолоджі Корпорейшн (Ascension Technology Corporation), обидві компанії розміщені в місті Барлінгтон, штат Вермонт, США (Burlington, VT, USA). В датчиках такого типу послідовно передаються три взаємно перпендикулярних магнітних поля, і три котушки, які розташовані у взаємно перпендикулярних напрямах, застосовуються для прийому окремих магнітних полів. Комп'ютер використовується для обчислення просторового положення і орієнтації комбінованих котушок. Ще одним типом датчика положення, який може бути використаний, є датчики виробництва компанії Едептів Оптике Ассошиейтс Інк., місто Кембрідж, штат Мінесота, США (Adaptive Optics Associates, Inc., of Cambridge, MA, USA). Ці датчики включають багато джерел світла, які приєднані до об'єкту, положення і орієнтація якого повинна бути визначеною, і багато камер, розташованих у відомих положеннях в просторі, які призначені для прийому світла, що випускається джерелами світла. Комп'ютер комбінує всі дані і обчислює положення і орієнтацію об'єкта. Ще одним типом датчиків положення, який може бути використаний, є система виробництва компанії Сайенс Аксесоріз Корпорейшн, місто Ньюхейвн, штат Конектикут, США (Science Accessories Corporation of Newhaven, CT, USA). Вона включає ультразвукове джерело, яке прикріплене до певної точки об’єкту, положення якого потрібно вимірювати, і багато мікрофонів, розташованих у відомих місцях у просторі, які призначені для прийому звуку, який випромінюється джерелом ультразвука. Комп'ютер комбінує всі дані і обчислює положення об'єкту. При приєднанні до об'єкту багатьох рознесених у просторі випромінювачів ультразвуку його орієнтація може обчислюватися шляхом комбінування даних про положення кожного з випромінювачів. Застосовуються датчики бездрітного типу, з тим, щоб мінімізувати їх вплив на процес народження. Проте, у деяких випадках може бути кращим використання механічних систем позиціонування, які грунтуються на маніпуляторах, фізично приєднаних до відстежуваних об'єктів і, які мають механічні датчики в з'єднаннях (які кодуються пристроями обертання), що дозволяють виконувати точне визначення просторового положення об'єктів, що відслідковуються. Комп'ютер 12 (Фіг.1), який приймає дані, що відповідають положенню датчиків PS1-PS4 положення, обробляє ці дані для того, щоб забезпечити отримання необхідного зображення. На фіг. 1 показані два типи дисплеїв 14, 16. На дисплеї 14 відображається кожний параметр, потоншення, ступінь розкриття шийки матки, положення шийки матки, положення і/або відстань МКД у формі одиниць відстані (наприклад, см). Дисплей 16, проте, це Партограма, на якій ступінь розкриття шийки матки і положення відображаються в графічній формі, як функція часу для відображення взаємозв'язку ступеня розкриття шийки матки і опускання голівки плода (або іншої представленої частини), і на якій згладжування і положення шийки матки також можуть відображатися аналогічно. Дисплей 16 Партограми, яка найдокладніше показана на Фіг.4, має особливе значення, оскільки є візуальним відображенням перебігу пологів, яке може бути записано, якщо це необхідно. Використовуючи Партограму, можна краще визначати, чи нормально відбуваються пологи. Лінії "турботи" і "дії"" можуть бути надруковані на Партограмі для забезпечення візуальної індикації того, чи нормально або ненормально відбуваються пологи, і, таким чином, краще вказувати обслуговуючому персоналу на необхідність розпочати невідкладні дії при необхідності. Така "електронна Партограма" може також помітно знизити кількість затяжних пологів, пропорцію внутрішньоутробних, післяпологових і ранніх неонатальних інфекцій, кількість непотрібних втручань, і травм новонароджених через неправильну оцінку положення голівки плода. На Фіг.5 зображена блок-схема пристрою контролю, що алогічний до пристрою, який зображений на Фіг.1, але в який додатково включена система відображення, яка призначена для отримання зображення ділянки утроби матері і для безперервного показу шийки матки матері, тазових кісток, і голівки плода (або іншої представленої частини). Відповідно до цього, пристрій, зображений на Фіг.5, має ультразвуковий перетворювач 40, який призначений для отримання зображення області утроби через комп'ютер 12 на дисплеї 42 зображення. Вона також включає датчик PS5 положення, який прикріплений до ультразвукового перетворювача 40. При цьому будь-яка точка, що зображена на дисплеї 42, може бути вибрана пристроєм 43 маркера, таким, як покажчик "миша", або при допомозі сенсорного екрану, і її положення передається в комп'ютер 12 для ідентифікації положення відповідних точок відносно положення датчика PS1 положення, який прикріплений до лобкових кісток матері. За цією інформацією комп'ютер 12 може вирахувати різні взаємозалежності, які відображаються на дисплеях 14 і 16, завдяки чому немає необхідності застосування датчиків PS2, PS3 і PS4 положення. Зображення, яке показується на дисплеї 42, може використовуватися також для маркування МТД на голівці плода, як показано на Фіг.8, дозволяючи, таким чином, вираховувати і відображати просторову відстань між МТД плода і вхідним отвором тазу. Бажано, щоб інші точки відліку, крім МТД або маківки голівки плода, а також будь-які інші точки тазу матері, могли використовуватися як точки відліку для контролю за перебігом пологів. Ця свобода вибору важлива через різноманітність переваг в методиках різних лікарів. Система відображення, яка показана на Фіг.5, може також використовуватися для отримання візуального зображення різних етапів перебігу пологів, наприклад, як зображено на фігурах 6А-6D, які показують перебіг розкриття і згладжування шийки матки, або як показано на фігурах 7-8, які зображують послідовне опускання маківки голівки плода через різні положення відносно сідничних горбиків 7 (Фіг.7) або відносно вхідного отвору тазу матері (Фіг.8). Якщо система отримання зображення використовується разом з усіма п'ятьма датчиками PS1-PS5 положення, які зображені на Фіг.5, ультразвукове зображення може використовуватись лише для вимірювання МТД на початку пологів або пізніше. Комп'ютер потім визначає відстань між МТД і маківкою голівки плода, і після цього він може використовувати положення маківки голівки плода також для визначення положення МТД. Ультразвукове зображення може після цього використовуватися тільки для перевірки, якщо в цьому є потреба. Воно може також використовуватися для перевірки ступеня розкриття шийки матки і її згладжування. Якщо пристрій, який зображений на Фіг.5, використовується тільки з ультразвуковим відображенням і датчиками PS1 і PS5 положення, контроль переважно може виконуватись не безперервно, а лише через певні проміжки, тобто, тільки тоді, коли є потреба контролювати певний етап перебігу пологів. Пристрій, який зображений на Фіг.5, може також використовуватися для визначення скорочень матки матері. При цьому під час скорочень голівка плода трохи пересувається, і ступінь розкриття матки дещо збільшується; а після скорочень ці обидва параметри повертаються в їх попереднє положення. Таким чином, спостерігаючи розкриття і/або положення голівки плода, як функцію часу, обслуговуючий лікар може спостерігати наявність скорочень, а також тривалість і силу таких скорочень. Крім того, завдяки введенню датчика серцебиття в датчик PS2 положення, який прикріплюється на голівці плода, лікар може спостерігати співвідношення частоти серцевих скорочень плода (ЧСС) відносно скорочень матки (CM), щоб показати зв'язок між цими величинами, як зображено на Фіг.9. Комп'ютер 12 може бути запрограмований для прийому вищевказаної інформації від різних датчиків та зображення на моніторі 45, де зображення на екрані відповідає серцевим скороченням плода (ЧСС) відносно скорочень матки (СМ), як показано на Фіг.9. Така інформація особливо необхідна, якщо встановлені ускладнення або існує небезпека наявності ускладнень. Хоча на кресленнях зображені окремі покази, було б бажано, щоб ці покази були виконані у формі вікон на одному і тому ж самому великому екрані комп'ютера. Хоча даний винахід був описаний відносно лише кращих варіантів втілення, очевидно, що вони наведені тільки для прикладу, і, що можуть бути виконані багато інших змін, модифікацій та варіантів застосування даного винаходу.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for monitoring progress of labor
Назва патенту російськоюСпособ и устройство для контроля течения родов
МПК / Мітки
МПК: A61B 8/02, A61B 5/103
Мітки: перебігом, спосіб, пристрій, пологів, контролю
Код посилання
<a href="https://ua.patents.su/8-65566-sposib-ta-pristrijj-dlya-kontrolyu-za-perebigom-pologiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій для контролю за перебігом пологів</a>
Спосіб підготовки шийки матки до пологів
Номер патенту: 31150
Опубліковано: 15.12.2000
Автор: Лазуренко Вікторія Валентинівна
МПК: A61M 19/00
Мітки: спосіб, підготовки, пологів, матки, шийки
Формула / Реферат:
Спосіб підготовки шийки матки до пологів, що включає моделювання перейми, який відрізняється тим, що моделювання перейми виконують охолодженням передньої черевної стінки в проекції матки до 25 С в перебігу 30 - 90 хвилин на добу з інтервалом 24 години до одержання клінічного ефекту.
Спосіб профілактики гіпотонічних кровотеч в iii періоді пологів
Номер патенту: 37565
Опубліковано: 15.05.2001
Автори: Коваленко Віктор Степанович, Григоренко Андрій Миколайович, Жук Світлана Іванівна
МПК: A61M 25/00, A61K 38/11
Мітки: спосіб, періоди, гіпотонічних, профілактики, кровотеч, пологів
Формула / Реферат:
Спосіб профілактики гіпотонічних кровотеч в III періоді пологів, що включає введення утеротонічних засобів, який відрізняється тим, що на початку III періоду пологів, зразу після відокремлення дитини від матері, пуповинним катетером катетеризують на всю довжину вену пуповини, в яку вводять 5-10 ОД окситоцину, розведеного ізотонічним розчином натрію хлориду до 20 мл.
Спосіб ведення пологів при вузькому тазі по і. амро і пристрій для його здійснення
Номер патенту: 60539
Опубліковано: 15.10.2003
Автор: Амро Ірина Геннадіївна
МПК: A61M 29/00
Мітки: здійснення, ведення, тазі, амро, спосіб, пристрій, вузькому, пологів
Формула / Реферат:
1. Спосіб ведення пологів при вузькому тазі, який відрізняється тим, що проводиться збільшення внутрішніх розмірів таза шляхом розведення безіменних кісток, переважно у ланці лобкового з'єднання перед пологами чи під час пологів.2. Спосіб по п. 1, який відрізняється тим, що розведення безіменних кісток здійснюється за рахунок прикладання дистракційного зусилля до внутрішньої поверхні повздовжніх кісток на рівні їх передніх верхніх...
Пристрій для знеболювання пологів
Номер патенту: 48894
Опубліковано: 15.08.2002
Автори: Галич Світлана Родионівна, Краснова Жанна Олександрівна, Шпак Ігор Вікторович, Давидович Дмитро Володимирович
МПК: A61M 21/02
Мітки: пристрій, знеболювання, пологів
Формула / Реферат:
Пристрій для знеболювання пологів, що включає перидуральний катетер, з'єднаний з ін'єктоматом, який відрізняється тим, що він додатково містить подовжувач довжиною не менше 150 см і розташований між перидуральним катетером і ін'єктоматом.
Спосіб ведення пологів при вузькому тазі по і. амро і пристрій для його здійснення

Номер патенту: 60537
Опубліковано: 15.10.2003
Автор: Амро Ірина Геннадіївна
МПК: A61B 17/42
Мітки: здійснення, вузькому, амро, спосіб, ведення, пристрій, пологів, тазі
Формула / Реферат:
1. Спосіб ведення пологів при вузькому тазі, який відрізняється тим, що проводиться збільшення внутрішніх розмірів порожнини таза шляхом розведення безіменних кісток.2. Спосіб по п. 1, який відрізняється тим, що розведення безіменних кісток здійснюється шляхом прикладання дистракційного зусилля безпосередньо до поверхні лобкових кісток, які утворюють лобкове зчленування. 3. Пристрій для здійснення способу ведення пологів при...
Попередній патент: Спосіб виготовлення багатопорожнинної залізобетонної монолітної плити
Наступний патент: Спосіб капсулювання небезпечних відходів (варіанти)
Випадковий патент: Герметичний нікель-кадмієвий акумулятор