Спосіб і пристрій для картографування джерел випромінювання


Формула / Реферат
1. Спосіб тривимірної картографії джерела (100) випромінювання в навколишньому середовищі (41), який включає першу зйомку видимого зображення (25) навколишнього середовища і першу зйомку зображення джерел (27), другу зйомку видимого зображення (26) навколишнього середовища і другу зйомку зображення джерел (28), причому зйомку видимих зображень і зйомку зображень джерел здійснюють під різними кутами, з подальшим створенням тривимірної видимої моделі навколишнього середовища, який відрізняється тим, що модель створюють шляхом:
- пошуку і ідентифікації аналогічних елементів візуальних зображень, потім
- обчислень місця розташування аналогічних елементів видимих зображень,
- визначення місця розташування ліній проектування джерел у моделі навколишнього середовища, причому це визначення місць розташування здійснюють шляхом зіставлення положень і орієнтації засобів, якими були зняті видимі зображення і зображення джерел, а лінії проектування орієнтують у відповідних попередньо відомих напрямках наведення засобу зйомки зображення джерел, що проходять через зображення джерел, після чого обчислюють положення точок з'єднання ліній проектування в моделі навколишнього середовища, причому ці точки збіжності є місцями розташування джерел.
2. Спосіб за п. 1, який відрізняється тим, що включає вимірювання відстані і напрямку переміщення засобу зйомки джерел між першим і другим зображенням джерел.
3. Спосіб за будь-яким з пп. 1 або 2, який відрізняється тим, що включає вимірювання відхилення відстані і напрямку положень засобів зйомки видимих зображень від відстані і напрямку положення першого видимого зображення до відстані і напрямку положення другого видимого зображення.
4. Спосіб за будь-яким з пп. 1-3, який відрізняється тим, що зображення джерел накладають на видимі зображення навколишнього середовища, зйомка яких булавиконана тим же самим засобом зйомки зображень.
5. Спосіб за п. 4, який відрізняється тим, що місця розташування ліній проектування, що з'єднують джерела з другим зображенням джерел, визначають на зазначеному видимому зображенні, на яке накладають друге зображення джерел, потім визначають у тривимірній моделі після визначення аналогічних елементів моделі і зазначеного видимого зображення.
6. Спосіб за будь-яким з пп. 1-3, який відрізняється тим, що включає створення другої тривимірної картографії навколишнього середовища шляхом порівняння третього і четвертого видимих зображень навколишнього середовища, причому місця розташування ліній проектування, що з'єднують джерела з другим зображенням джерел, визначають на зазначеній другій моделі, потім на першій моделі після попереднього виявлення аналогічних елементів моделей.
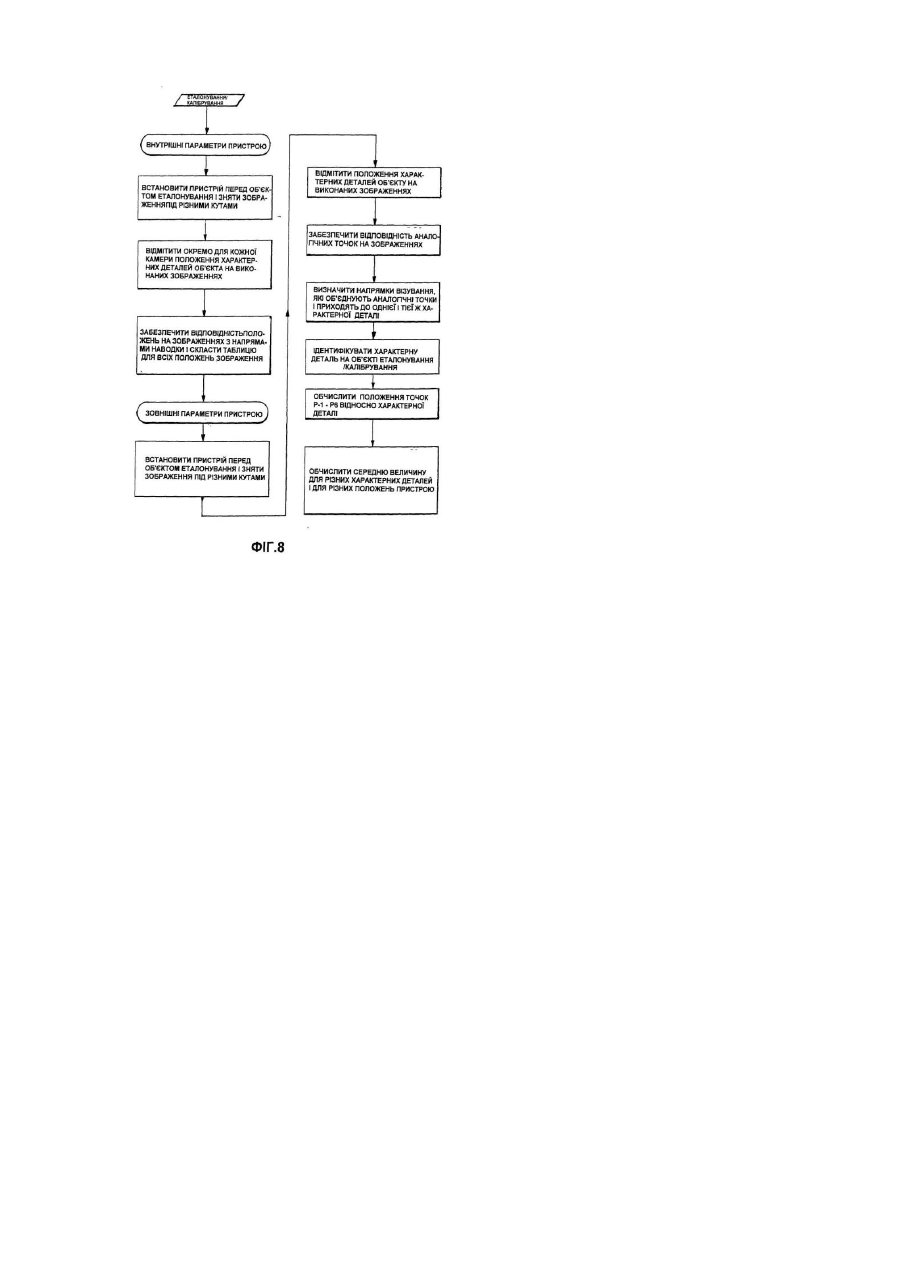
7. Спосіб за будь-яким з пп. 1-6, який відрізняється тим, що включає етап попереднього еталонування (калібрування), зокрема виправлення можливого спотворення зображень з створенням таблиці відповідності між точками (38) зображень і напрямками візування (32) видимого об'єкта (35) при визначеному положенні засобів зйомки зображень (6, 7).
8. Спосіб за будь-яким з пп. 1-7, який відрізняється тим, що попередній етап еталонування (калібрування) полягає в обчисленні місця розташування оптичних центрів (P1, P2, Р3) засобів зйомки зображень відносно видимого об'єкта (35) і обчисленні напрямку (Р1Р4, Р2Р5, Р3Р6) центральних осей візування пристроїв зйомки зображень (6, 7).
9. Пристрій для картографії джерел випромінювання (40) для здійснення способу за п. 1, який має у складі засіб (6) зйомки зображень випромінювання (27, 28), пару засобів (7) зйомки видимих зображень (25, 26) навколишнього середовища (41) джерел випромінювання, причому засоби зйомки видимих зображень орієнтовано у таких напрямках, що вони у сукупності мають цілком або частково спільне поле візування і встановлені на одній спільній жорсткій регульованій опорі (1) з засобом для зйомки зображень випромінювання, а також має засоби фотограметрії (55) для формування видимої тривимірної моделі навколишнього середовища на основі видимих зображень і накладання на видиму модель тривимірної моделі джерел випромінювання, побудованої на основі зображень випромінювання на видимій моделі.
10. Пристрій для картографії за п. 9, який відрізняється тим, що має регулюючі засоби (10, 11, 18) для регулювання положення засобів (6, 7) зйомки зображення на спільній опорі.
11. Пристрій для картографії за п. 10, який відрізняється тим, що регулюючі засоби мають шарніри (10) засобів (7) зйомки видимих зображень для регулювання кута збіжності зазначених пристроїв зйомки видимих зображень.
12. Пристрій для картографії за будь-яким з пп. 9-11, який відрізняється тим, що має мішень еталонування (35).
Текст
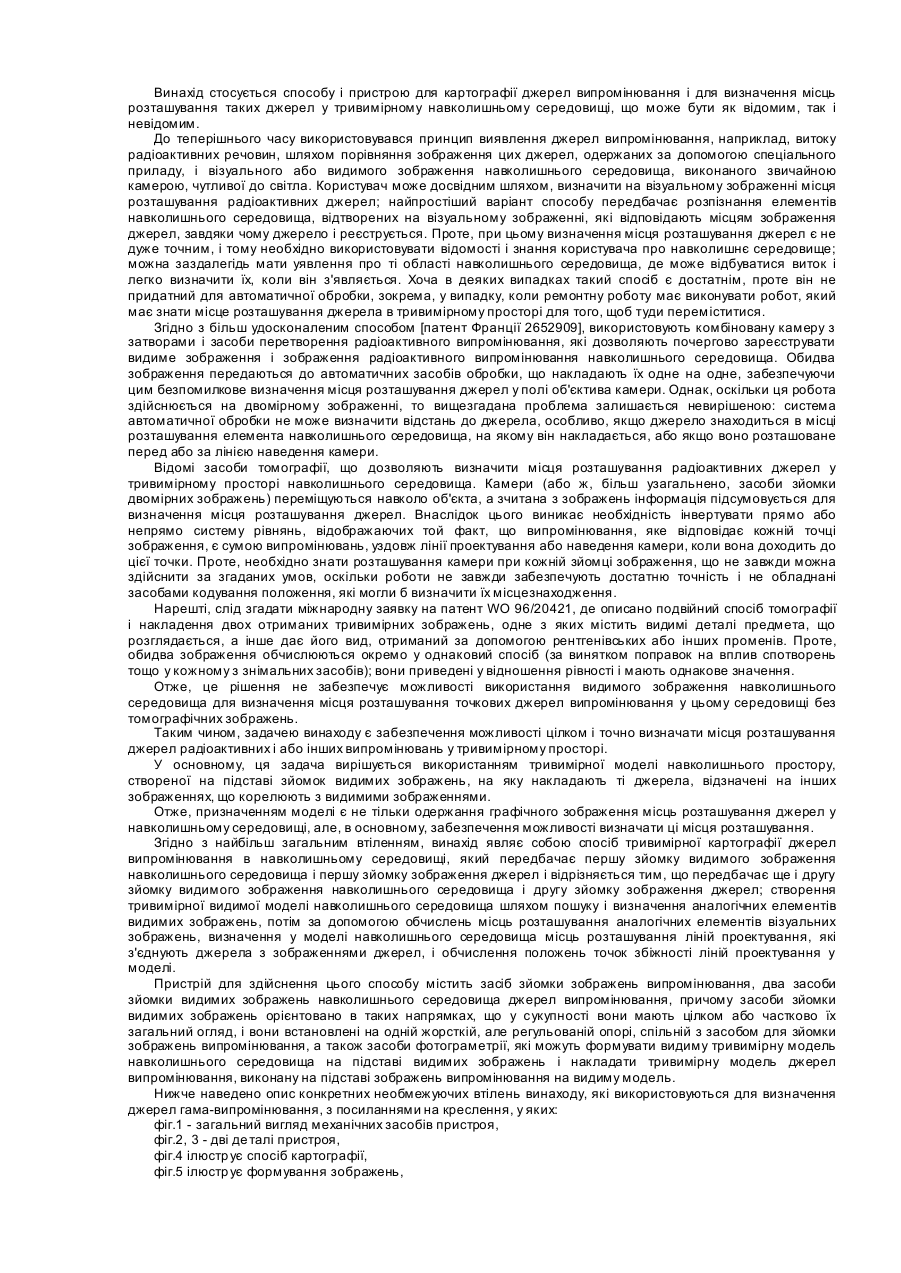
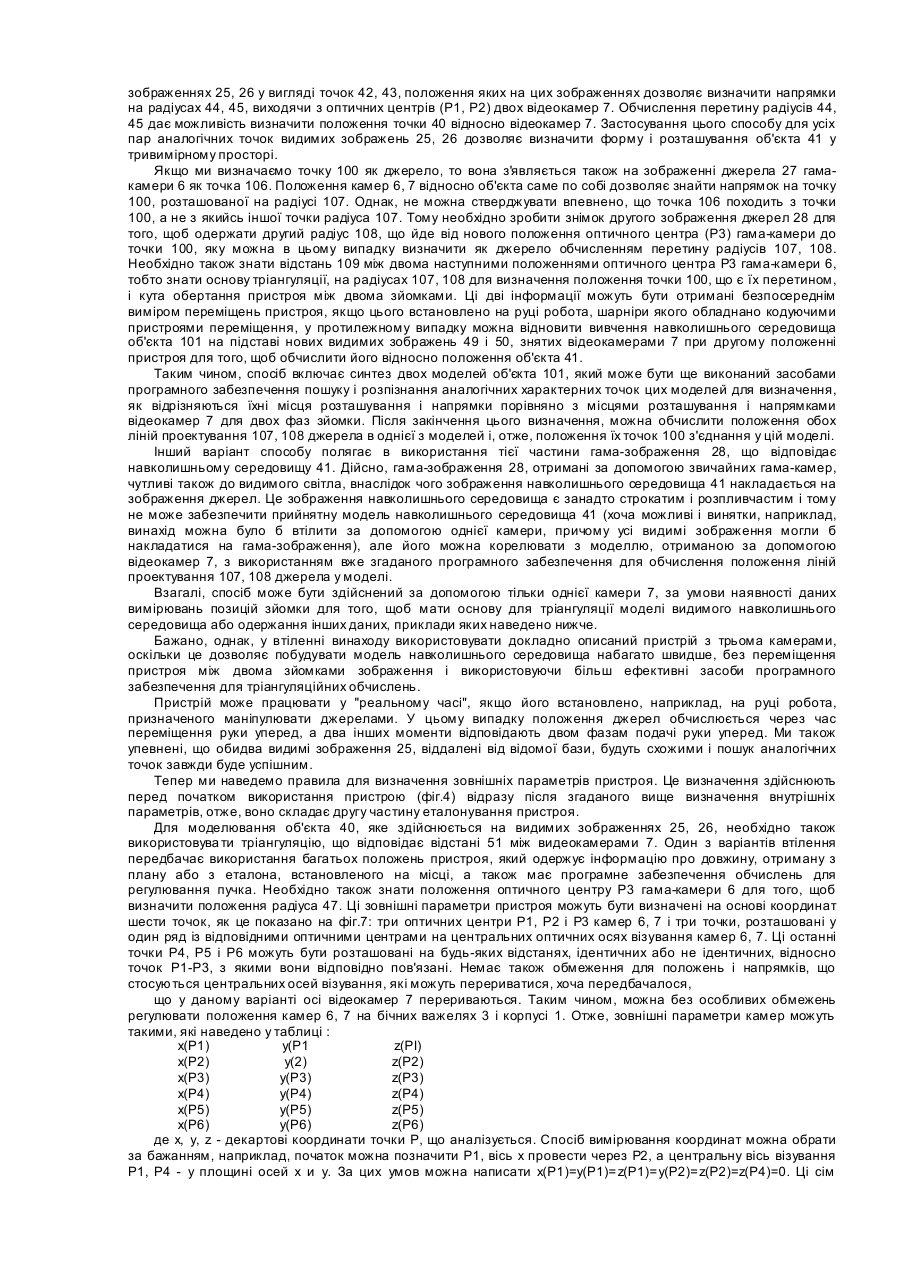
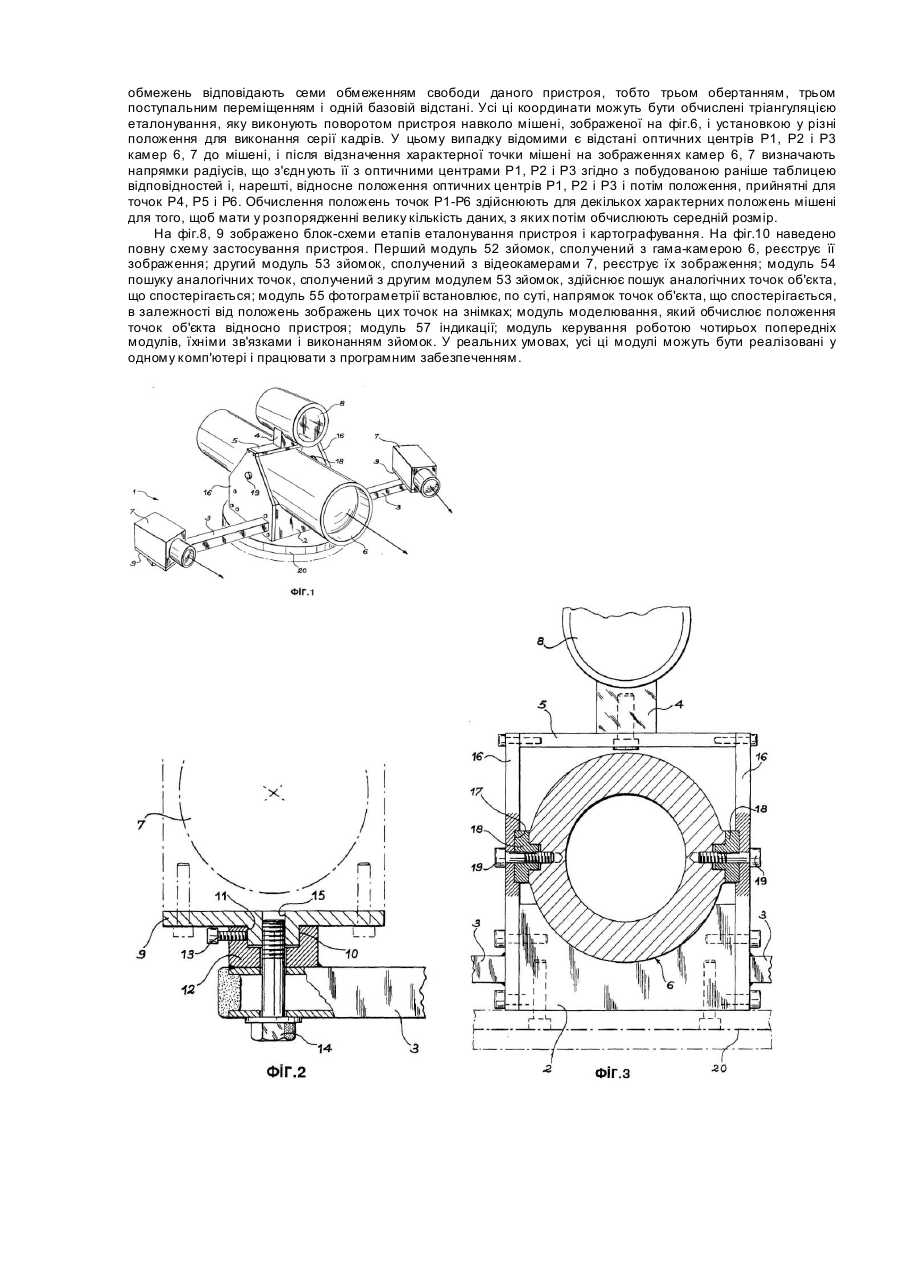
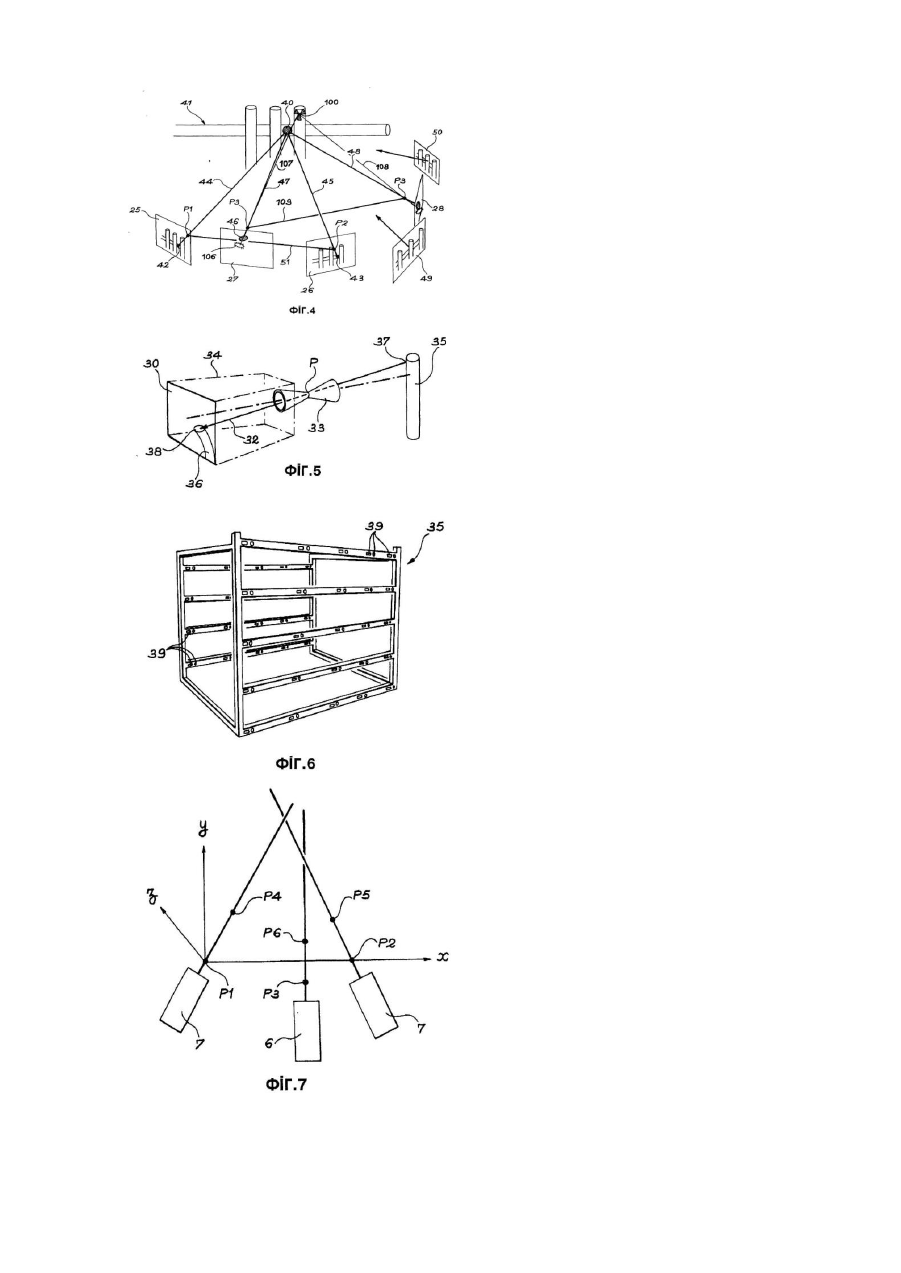
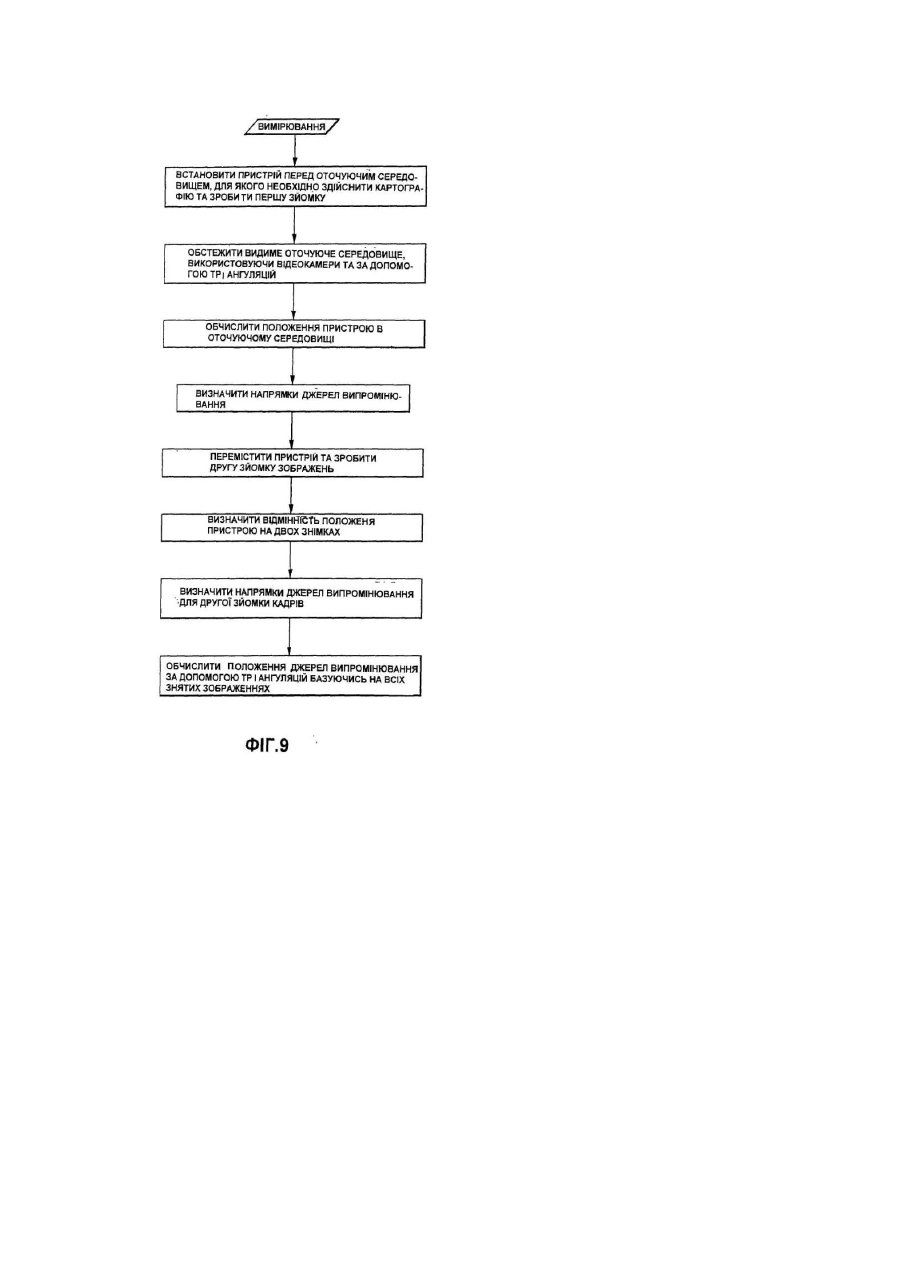
Винахід стосується способу і пристрою для картографії джерел випромінювання і для визначення місць розташування таких джерел у тривимірному навколишньому середовищі, що може бути як відомим, так і невідомим. До теперішнього часу використовувався принцип виявлення джерел випромінювання, наприклад, витоку радіоактивних речовин, шляхом порівняння зображення цих джерел, одержаних за допомогою спеціального приладу, і візуального або видимого зображення навколишнього середовища, виконаного звичайною камерою, чутливої до світла. Користувач може досвідним шляхом, визначити на візуальному зображенні місця розташування радіоактивних джерел; найпростіший варіант способу передбачає розпізнання елементів навколишнього середовища, відтворених на візуальному зображенні, які відповідають місцям зображення джерел, завдяки чому джерело і реєструється. Проте, при цьому визначення місця розташування джерел є не дуже точним, і тому необхідно використовувати відомості і знання користувача про навколишнє середовище; можна заздалегідь мати уявлення про ті області навколишнього середовища, де може відбуватися виток і легко визначити їх, коли він з'являється. Хоча в деяких випадках такий спосіб є достатнім, проте він не придатний для автоматичної обробки, зокрема, у випадку, коли ремонтну роботу має виконувати робот, який має знати місце розташування джерела в тривимірному просторі для того, щоб туди переміститися. Згідно з більш удосконаленим способом [патент Франції 2652909], використовують комбіновану камеру з затворами і засоби перетворення радіоактивного випромінювання, які дозволяють почергово зареєструвати видиме зображення і зображення радіоактивного випромінювання навколишнього середовища. Обидва зображення передаються до автоматичних засобів обробки, що накладають їх одне на одне, забезпечуючи цим безпомилкове визначення місця розташування джерел у полі об'єктива камери. Однак, оскільки ця робота здійснюється на двомірному зображенні, то вищезгадана проблема залишається невирішеною: система автоматичної обробки не може визначити відстань до джерела, особливо, якщо джерело знаходиться в місці розташування елемента навколишнього середовища, на якому він накладається, або якщо воно розташоване перед або за лінією наведення камери. Відомі засоби томографії, що дозволяють визначити місця розташування радіоактивних джерел у тривимірному просторі навколишнього середовища. Камери (або ж, більш узагальнено, засоби зйомки двомірних зображень) переміщуються навколо об'єкта, а зчитана з зображень інформація підсумовується для визначення місця розташування джерел. Внаслідок цього виникає необхідність інвертувати прямо або непрямо систему рівнянь, відображаючих той факт, що випромінювання, яке відповідає кожній точці зображення, є сумою випромінювань, уздовж лінії проектування або наведення камери, коли вона доходить до цієї точки. Проте, необхідно знати розташування камери при кожній зйомці зображення, що не завжди можна здійснити за згаданих умов, оскільки роботи не завжди забезпечують достатню точність і не обладнані засобами кодування положення, які могли б визначити їх місцезнаходження. Нарешті, слід згадати міжнародну заявку на патент WO 96/20421, де описано подвійний спосіб томографії і накладення двох отриманих тривимірних зображень, одне з яких містить видимі деталі предмета, що розглядається, а інше дає його вид, отриманий за допомогою рентгенівських або інших променів. Проте, обидва зображення обчислюються окремо у однаковий спосіб (за винятком поправок на вплив спотворень тощо у кожному з знімальних засобів); вони приведені у відношення рівності і мають однакове значення. Отже, це рішення не забезпечує можливості використання видимого зображення навколишнього середовища для визначення місця розташування точкових джерел випромінювання у цьому середовищі без томографічних зображень. Таким чином, задачею винаходу є забезпечення можливості цілком і точно визначати місця розташування джерел радіоактивних і або інших випромінювань у тривимірному просторі. У основному, ця задача вирішується використанням тривимірної моделі навколишнього простору, створеної на підставі зйомок видимих зображень, на яку накладають ті джерела, відзначені на інших зображеннях, що корелюють з видимими зображеннями. Отже, призначенням моделі є не тільки одержання графічного зображення місць розташування джерел у навколишньому середовищі, але, в основному, забезпечення можливості визначати ці місця розташування. Згідно з найбільш загальним втіленням, винахід являє собою спосіб тривимірної картографії джерел випромінювання в навколишньому середовищі, який передбачає першу зйомку видимого зображення навколишнього середовища і першу зйомку зображення джерел і відрізняється тим, що передбачає ще і другу зйомку видимого зображення навколишнього середовища і другу зйомку зображення джерел; створення тривимірної видимої моделі навколишнього середовища шляхом пошуку і визначення аналогічних елементів видимих зображень, потім за допомогою обчислень місць розташування аналогічних елементів візуальних зображень, визначення у моделі навколишнього середовища місць розташування ліній проектування, які з'єднують джерела з зображеннями джерел, і обчислення положень точок збіжності ліній проектування у моделі. Пристрій для здійснення цього способу містить засіб зйомки зображень випромінювання, два засоби зйомки видимих зображень навколишнього середовища джерел випромінювання, причому засоби зйомки видимих зображень орієнтовано в таких напрямках, що у сукупності вони мають цілком або частково їх загальний огляд, і вони встановлені на одній жорсткій, але регульованій опорі, спільній з засобом для зйомки зображень випромінювання, а також засоби фотограметрії, які можуть формувати видиму тривимірну модель навколишнього середовища на підставі видимих зображень і накладати тривимірну модель джерел випромінювання, виконану на підставі зображень випромінювання на видиму модель. Нижче наведено опис конкретних необмежуючих втілень винаходу, які використовуються для визначення джерел гама-випромінювання, з посиланнями на креслення, у яких: фіг.1 - загальний вигляд механічних засобів пристроя, фіг.2, 3 - дві де талі пристроя, фіг.4 ілюстр ує спосіб картографії, фіг.5 ілюстр ує формування зображень, фіг.6 - іспитова таблиця еталонування, фіг.7 ілюстр ує геометричне визначення деяких параметрів пристроя, фіг.8, 9 - дві блок-схеми, що ілюструють процедури еталонування і обслуговування пристроя, фіг.10 - схема засобів, зокрема, інформаційних, обслуговування пристроя. Фіг.1 містить загальну конструкцію пристроя згідно з винаходом. Корпус 1 містить центральний кожух 2, від якого у протилежних напрямках відходять два бічних важелі 3 і верхній виступ 4. Центральний кожух 2 містить виїмку, орієнтовану у напрямку до передньої частини і призначену для встановлення гама-камери 6. Відеокамери 7 встановлено на кінцях бічних важелів 3. Проектор 8 встановлено на верхній частині верхнього виступу 4. Відеокамери 7 вгвинчують у поворотні плити 9, кожна з який має (фіг.2) нижню цапфу 10, уведену у горловину 11 кільця 12, привареного до кінця прилягаючого важеля 3. У кільці 12 встановлено бічний нажимний гвинт 13, кінець якого входить у горловину 11 і затискає нижню цапфу 10, утримуючи її на місці у заданому напрямку. Кріпильний гвинт 14 уведено у нарізний отвір 15 плити 9, співосний з нижньою цапфою 10, і цей гвинт 14 проходить через бічний важіль 3 і через кільце 12, утримуючи комплекс у блокованому положенні. Таке розташування дозволяє, як можна бачити, орієнтувати за необхідністю відеокамери 7 у одній площині за азимутом для встановлення їх з заданим кутом збіжності. Центральний кожух 2 містить, по суті (фіг.1, 3) дві протилежні бічні стінки 16 з виїмкою 17, призначеною для опорної цапфи 18 гама-камери 6. Гвинти 19 уводяться через бічні стінки 16 і цапфи 18 і вгвинчуються у гама-камеру 6 для її блокування в заданому положенні. Таким чином, після того, як гвинти віджато, її можна повертати навколо горизонтальної осі, визначеної цапфами 18, і, отже, регулювати на місці ЇЇ орієнтацію. Корпус 1 встановлено на станині 20, яку можна виготовити поворотною і кріпити на основі (не зображеній) - на руці робота або на іншій деталі залежно від застосування. Спосіб визначення місця розташування джерел радіоактивних випромінювань може бути описаний дуже просто за допомогою фіг.4. Пристрій, наближений на припустиму відстань до досліджуваного навколишнього середовища здійснює зйомку першої серії зображень навколишнього середовища нерухомими відеокаме-рою 7 і гама-камерою 6. Обидва отримані у такий спосіб видимі зображення 25 і 26 навколишнього середовища репрезентують, по суті, один об'єкт під різними кутами з відеокамер 7. Автоматичне порівняння видимих зображень 25, 26, яке полягає в ідентифікуванні і з'єднанні відповідних точок зображення однієї й той же характерної деталі навколишнього простору. Це дозволяє визначити положення точок навколишнього середовища відносно пристроя, включаючи їх відстань. Отже, можна моделювати навколишнє середовище в трьох вимірах і визначати місце розташування пристроя у цьому середовищі. Пошук аналогічних точок на двох видимих зображеннях 25, 26 здійснюється спеціальними засобами програмного забезпечення, які є у продажу. Існують навіть такі засоби програмного забезпечення, що можуть розрізняти безпосередньо всі деталі на зображенні шляхом розпізнання форми, пов'язаної з кореляцією зображень, і знаходити їх на аналогічному зображенні. Після того, як визначено пару відповідних точок на видимих зображеннях 25, 26, визначають дві лінії, що доходять до відеокамер 6, якими реальна точка навколишнього середовища проектується на видимі зображення 25, 26. У цьому випадку, відхилення і кут збіжності відеокамер 6 відомі і елементарна тріангуляція дозволяє знайти точку перетину ліній проектування, тобто положення точки в навколишньому просторі. Гама-камера 6 здійснює зйомку зображення 27 радіоактивних джерел. Однак, для того, щоб визначити положення джерел цілком, необхідно зробити знімок іншого зображення джерел 28, а саме після переміщення пристроя і спрямування його на ту ж ділянку навколишнього середовища, і порівняти ці два положення 27 і 28, що дозволяє визначити відстань між джерелами і гама-камерою 6. Нижче наведено більш докладний опис способу. Операції визначення положення точок видимого і радіоактивного навколишнього середовища на підставі зображень 25, 28 виконуються програмним забезпеченням фотограметрії у сполученні з засобами обчислення тріангуляцією. Необхідно, однак, заздалегідь виконувати еталонування для того, щоб визначити зовнішні і внутрішні параметри камер 6 і 7, тобто, з одного боку, їх положення і відносні напрямки, і з іншого боку, їх характеристики відтворення навколишнього середовища на підставі зображень, що вони дають. Необхідно спочатку визначити внутрішні параметри. Гама-камера 6 і відеокамера 7 можуть бути репрезентовані (фіг.5) площиною зображення 30, на якій було прийняте зображення 25, 26, 27 або 28 і оптичним центром Ρ перед площиною зображення 30, через яку проходять усі радіуси 32, що відбивають площину зображення 30. Оптичний центр утворюється діафрагмою відеокамер 7 і коліматором 33, встановленим перед камерою 34 з стенопом (камерою-обскурою), на дні якої лежить площина зображення 30 для гама-камери 6. Об'єкт 35, що візується камерою, з'являється на його площині зображення у вигляді зображення 36 об'єкта з можливими спотвореннями, проте, якщо об'єкт 35 є мішенню відомої форми, а положення камери 6 або 7 і, зокрема, площини зображення 30 і оптичного центру Ρ обчислюються відносно об'єкта 35, то можна встановити відповідність між кожною точкою 37 об'єкта 35 і точкою 38, якою він репрезентований на площині зображення 30, визначаючи радіус 32, що їх з'єдн ує і проходить через оптичний центр Р. Цей радіус 32 може бути повністю визначений через координати оптичного центру Ρ и точки 37. Еталонування (калібрування) полягає у складанні точної таблиці відповідності між кожною точкою 38 зображення, знятої камерою 6 і 7, і напрямком наведення (радіус 32), з'єднаним з цією точкою і оптичним центром Р. Ця таблиця є обов'язковою для даних регулювання камери і призначена для визначення напрямків точок невідомих об'єктів, зображення яких одержують зйомкою. Об'єкт 35 відомої форми може бути поданий у вигляді мішені, зображеної на фіг.6, яка складається із сітки перехресних стрижнів, розташованих на відстані один від одного і несуть точки 39, точно идентифіковані. Це дозволяє програмному забезпеченню фотограметрії легко знайти характерні точки зображення і идентифікувати їх у відповідних точках мішені. Розглядаючи знову фіг. 4, можна зрозуміти, що у цьому випадку будь-яка точка 40 об'єкта 41 спочатку невідомого навколишнього середовища, яка візується двома відеокамерами 7, з'явиться на видимих зображеннях 25, 26 у вигляді точок 42, 43, положення яких на цих зображеннях дозволяє визначити напрямки на радіусах 44, 45, виходячи з оптичних центрів (Р1, Р2) двох відеокамер 7. Обчислення перетину радіусів 44, 45 дає можливість визначити положення точки 40 відносно відеокамер 7. Застосування цього способу для усіх пар аналогічних точок видимих зображень 25, 26 дозволяє визначити форму і розташування об'єкта 41 у тривимірному просторі. Якщо ми визначаємо точку 100 як джерело, то вона з'являється також на зображенні джерела 27 гамакамери 6 як точка 106. Положення камер 6, 7 відносно об'єкта саме по собі дозволяє знайти напрямок на точку 100, розташованої на радіусі 107. Однак, не можна стверджувати впевнено, що точка 106 походить з точки 100, а не з якийсь іншої точки радіуса 107. Тому необхідно зробити знімок другого зображення джерел 28 для того, щоб одержати другий радіус 108, що йде від нового положення оптичного центра (Р3) гама-камери до точки 100, яку можна в цьому випадку визначити як джерело обчисленням перетину радіусів 107, 108. Необхідно також знати відстань 109 між двома наступними положеннями оптичного центра Р3 гама-камери 6, тобто знати основу тріангуляції, на радіусах 107, 108 для визначення положення точки 100, що є їх перетином, і кута обертання пристроя між двома зйомками. Ці дві інформації можуть бути отримані безпосереднім виміром переміщень пристроя, якщо цього встановлено на руці робота, шарніри якого обладнано кодуючими пристроями переміщення, у протилежному випадку можна відновити вивчення навколишнього середовища об'єкта 101 на підставі нових видимих зображень 49 і 50, знятих відеокамерами 7 при другому положенні пристроя для того, щоб обчислити його відносно положення об'єкта 41. Таким чином, спосіб включає синтез двох моделей об'єкта 101, який може бути ще виконаний засобами програмного забезпечення пошуку і розпізнання аналогічних характерних точок цих моделей для визначення, як відрізняються їхні місця розташування і напрямки порівняно з місцями розташування і напрямками відеокамер 7 для двох фаз зйомки. Після закінчення цього визначення, можна обчислити положення обох ліній проектування 107, 108 джерела в однієї з моделей і, отже, положення їх точок 100 з'єднання у цій моделі. Інший варіант способу полягає в використання тієї частини гама-зображення 28, що відповідає навколишньому середовищу 41. Дійсно, гама-зображення 28, отримані за допомогою звичайних гама-камер, чутливі також до видимого світла, внаслідок чого зображення навколишнього середовища 41 накладається на зображення джерел. Це зображення навколишнього середовища є занадто строкатим і розпливчастим і тому не може забезпечити прийнятну модель навколишнього середовища 41 (хоча можливі і винятки, наприклад, винахід можна було б втілити за допомогою однієї камери, причому усі видимі зображення могли б накладатися на гама-зображення), але його можна корелювати з моделлю, отриманою за допомогою відеокамер 7, з використанням вже згаданого програмного забезпечення для обчислення положення ліній проектування 107, 108 джерела у моделі. Взагалі, спосіб може бути здійснений за допомогою тільки однієї камери 7, за умови наявності даних вимірювань позицій зйомки для того, щоб мати основу для тріангуляції моделі видимого навколишнього середовища або одержання інших даних, приклади яких наведено нижче. Бажано, однак, у втіленні винаходу використовувати докладно описаний пристрій з трьома камерами, оскільки це дозволяє побудувати модель навколишнього середовища набагато швидше, без переміщення пристроя між двома зйомками зображення і використовуючи більш ефективні засоби програмного забезпечення для тріангуляційних обчислень. Пристрій може працювати у "реальному часі", якщо його встановлено, наприклад, на руці робота, призначеного маніпулювати джерелами. У цьому випадку положення джерел обчислюється через час переміщення руки уперед, а два інших моменти відповідають двом фазам подачі руки уперед. Ми також упевнені, що обидва видимі зображення 25, віддалені від відомої бази, будуть схожими і пошук аналогічних точок завжди буде успішним. Тепер ми наведемо правила для визначення зовнішніх параметрів пристроя. Це визначення здійснюють перед початком використання пристрою (фіг.4) відразу після згаданого вище визначення внутрішніх параметрів, отже, воно складає другу частину еталонування пристроя. Для моделювання об'єкта 40, яке здійснюється на видимих зображеннях 25, 26, необхідно також використовува ти тріангуляцію, що відповідає відстані 51 між видеокамерами 7. Один з варіантів втілення передбачає використання багатьох положень пристроя, який одержує інформацію про довжину, отриману з плану або з еталона, встановленого на місці, а також має програмне забезпечення обчислень для регулювання пучка. Необхідно також знати положення оптичного центру Р3 гама-камери 6 для того, щоб визначити положення радіуса 47. Ці зовнішні параметри пристроя можуть бути визначені на основі координат шести точок, як це показано на фіг.7: три оптичних центри Р1, Р2 і Р3 камер 6, 7 і три точки, розташовані у один ряд із відповідними оптичними центрами на центральних оптичних осях візування камер 6, 7. Ці останні точки Р4, Р5 і Р6 можуть бути розташовані на будь-яких відстанях, ідентичних або не ідентичних, відносно точок Р1-Р3, з якими вони відповідно пов'язані. Немає також обмеження для положень і напрямків, що стосуються центральних осей візування, які можуть перериватися, хоча передбачалося, що у даному варіанті осі відеокамер 7 перериваються. Таким чином, можна без особливих обмежень регулювати положення камер 6, 7 на бічних важелях 3 і корпусі 1. Отже, зовнішні параметри камер можуть такими, які наведено у таблиці : х(Р1) у(Р1 z(PI) х(Р2) у(2) z(P2) х(Р3) у(Р3) z(P3) х(Р4) у(Р4) z(P4) х(Р5) у(Р5) z(P5) х(Р6) у(Р6) z(P6) де x, у, z - декартові координати точки Р, що аналізується. Спосіб вимірювання координат можна обрати за бажанням, наприклад, початок можна позначити Р1, вісь x провести через Р2, а центральну вісь візування Р1, Р4 - у площині осей x и у. За цих умов можна написати х(Р1)=у(Р1)=z(Ρ1)=у(Р2)=z(Ρ2)=z(Ρ4)=0. Ці сім обмежень відповідають семи обмеженням свободи даного пристроя, тобто трьом обертанням, трьом поступальним переміщенням і одній базовій відстані. Усі ці координати можуть бути обчислені тріангуляцією еталонування, яку виконують поворотом пристроя навколо мішені, зображеної на фіг.6, і установкою у різні положення для виконання серії кадрів. У цьому випадку відомими є відстані оптичних центрів Р1, Р2 і Р3 камер 6, 7 до мішені, і після відзначення характерної точки мішені на зображеннях камер 6, 7 визначають напрямки радіусів, що з'єдн ують її з оптичними центрами Р1, Р2 і Р3 згідно з побудованою раніше таблицею відповідностей і, нарешті, відносне положення оптичних центрів Р1, Р2 і Р3 і потім положення, прийнятні для точок Р4, Р5 і Р6. Обчислення положень точок Р1-Р6 здійснюють для декількох характерних положень мішені для того, щоб мати у розпорядженні велику кількість даних, з яких потім обчислюють середній розмір. На фіг.8, 9 зображено блок-схеми етапів еталонування пристроя і картографування. На фіг.10 наведено повну схему застосування пристроя. Перший модуль 52 зйомок, сполучений з гама-камерою 6, реєструє її зображення; другий модуль 53 зйомок, сполучений з відеокамерами 7, реєструє їх зображення; модуль 54 пошуку аналогічних точок, сполучений з другим модулем 53 зйомок, здійснює пошук аналогічних точок об'єкта, що спостерігається; модуль 55 фотограметрії встановлює, по суті, напрямок точок об'єкта, що спостерігається, в залежності від положень зображень цих точок на знімках; модуль моделювання, який обчислює положення точок об'єкта відносно пристроя; модуль 57 індикації; модуль керування роботою чотирьох попередніх модулів, їхніми зв'язками і виконанням зйомок. У реальних умовах, усі ці модулі можуть бути реалізовані у одному комп'ютері і працювати з програмним забезпеченням.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for locating radiation sources
Назва патенту російськоюСпособ и устройство для определения местоположения источников излучения
МПК / Мітки
МПК: G01T 7/00, G01T 1/29, G01C 11/00
Мітки: спосіб, випромінювання, пристрій, джерел, картографування
Код посилання
<a href="https://ua.patents.su/8-66784-sposib-i-pristrijj-dlya-kartografuvannya-dzherel-viprominyuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для картографування джерел випромінювання</a>
Спосіб локації джерел випромінювання і пристрій для його реалізації
Номер патенту: 38212
Опубліковано: 17.03.2003
Автор: ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: B25J 19/02, G01B 9/00
Мітки: пристрій, реалізації, спосіб, локації, джерел, випромінювання
Формула / Реферат:
1. Спосіб локації джерел випромінювання з застосуванням визначення кутів-пеленгів джерел випромінювання, з використанням оптичних елементів, який відрізняється тим, що визначають параметри зміщення потоку випромінювання джерел випромінювання при взаємодії з оптичними елементами, які потім використовують при визначенні координат джерел випромінювання.2. Спосіб за п. 1, який відрізняється тим, що визначення параметрів зміщення виконують...
Пристрій для визначення місця розташування джерел випромінювання
Номер патенту: 46882
Опубліковано: 17.06.2002
Автори: Лен Фредерік, Галь Олівьє, Гоше Жан-Клод
Мітки: пристрій, місця, джерел, визначення, випромінювання, розташування
Формула / Реферат:
1. Пристрій для визначення місця розташування джерел випромінювання (2), які можуть розташовуватись в зоні, що містить камеру з точковою діафрагмою (4), стінка якої функціонує як екрануюча оболонка (6), що поглинає зазначене проміння, засоби (16, 33) закриття камери з точковою діафрагмою, які є прозорими для радіоактивного випромінювання джерела, пристрій також містить засоби (24-26, 70-72) формування зображень в камері з точковою діафрагмою,...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52633
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: координат, джерел, станція, вимірювання, пасивна, випромінювання
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший і другий вихід пеленгаторної станції з'єднані відповідно з входом БОППГ і входом БОПОГ, вихід останнього є першим виходом станції, яка відрізняється тим, що у неї додатково введені блок визначення швидкості зміни...
Спосіб визначення джерел радіоактивного випромінювання в структурах тканин головного мозку
Номер патенту: 36712
Опубліковано: 16.04.2001
Автори: Марцинкевич Олександр Вікторович, Марцинкевич Олександр Олександрович
МПК: G01T 1/24
Мітки: головного, випромінювання, радіоактивного, джерел, структурах, спосіб, тканин, мозку, визначення
Текст:
...комплексу апаратури. Дослідний зразок структур медіобазальних тканин головного мозку масою приблизно 0,4-0,6 кг розміщується у спеціальній радіаційно-захисній камері, виготовленій з свинцевих кілець, на торцевій поверхні корпусу холодопроводу, в конструкції якого розміщено НПДВ. Внутрішня поверхня захисної камери облицьована міддю для зниження вкладу характеристичного випромінювання свинцю. У складі гама-спектрометричного комплексу...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52649
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: випромінювання, координат, вимірювання, джерел, пасивна, станція
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший вихід пеленгаторної станції з'єднаний з входом БОППГ, яка відрізняється тим, що в неї додатково введені блок визначення швидкості зміни пеленга (БВШЗП), блок визначення дальності, схема порівняння, оперативний...
Попередній патент: Світловод для лазерного зварювання та різання нерухомих кільцевих стиків трубопроводів та спосіб його використання
Наступний патент: Дизаміщені біциклічні гетероцикли та лікарський засіб на їх основі
Випадковий патент: Застосування інгібіторів циклооксигенази-2 для запобігання серцево-судинним розладам