Спосіб прогнозування технічного стану об’єктів
Номер патенту: 73885
Опубліковано: 10.10.2012
Автори: Кондратенко Юрій Пантелійович, Атаманюк Ігор Петрович


Формула / Реферат
Спосіб прогнозування технічного стану об'єктів, згідно з яким визначають граничні межі допустимого інтервалу змінювання контрольованого параметра об'єкта контролю, здійснюють збір статистичної інформації щодо змінювання випадкових значень контрольованого параметра в процесі експлуатації об'єктів контролю подібного класу, на основі статистичної інформації обчислюють моментні функції відповідного випадкового процесу змінювання контрольованого параметра за множиною реалізацій, з використанням моментних функцій здійснюють канонічне розкладання відповідного випадкового процесу, а в подальшому за допомогою екстраполятора реалізують екстраполяційну процедуру прогнозування майбутніх змін відповідного параметра об'єкта контролю, при цьому визначають прогнозовані значення контрольованого параметра у відповідні майбутні моменти часу за відомими значеннями на інтервалі спостереження, після чого перевіряють прогнозоване значення на належність до допустимого інтервалу змінювання контрольованого параметра, у випадку входження до допустимого інтервалу об'єкт контролю вважають працездатним, а у протилежному випадку - фіксують відмову об'єкта контролю, який відрізняється тим, що при формуванні канонічного розкладу відповідного випадкового процесу враховують змішані моментні функції будь-якого порядку нелінійності між двома довільними моментами часу, використовують дану апріорну інформацію в подальшому визначенні параметрів екстраполятора, оцінку майбутнього значення контрольованого параметра при прогнозуванні обчислюють як нелінійну та оптимальну в середньоквадратичному змісті за відповідним алгоритмом.
Текст
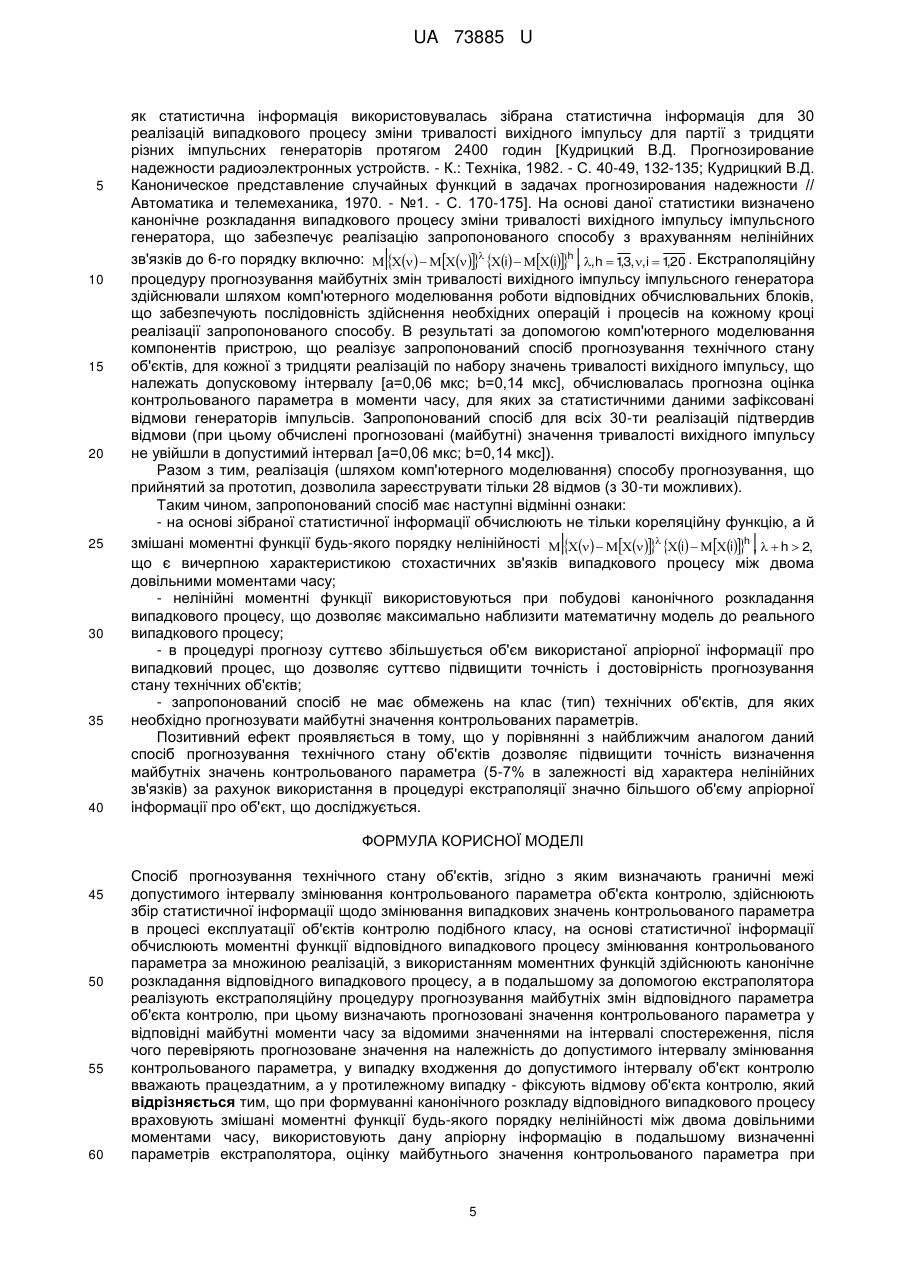
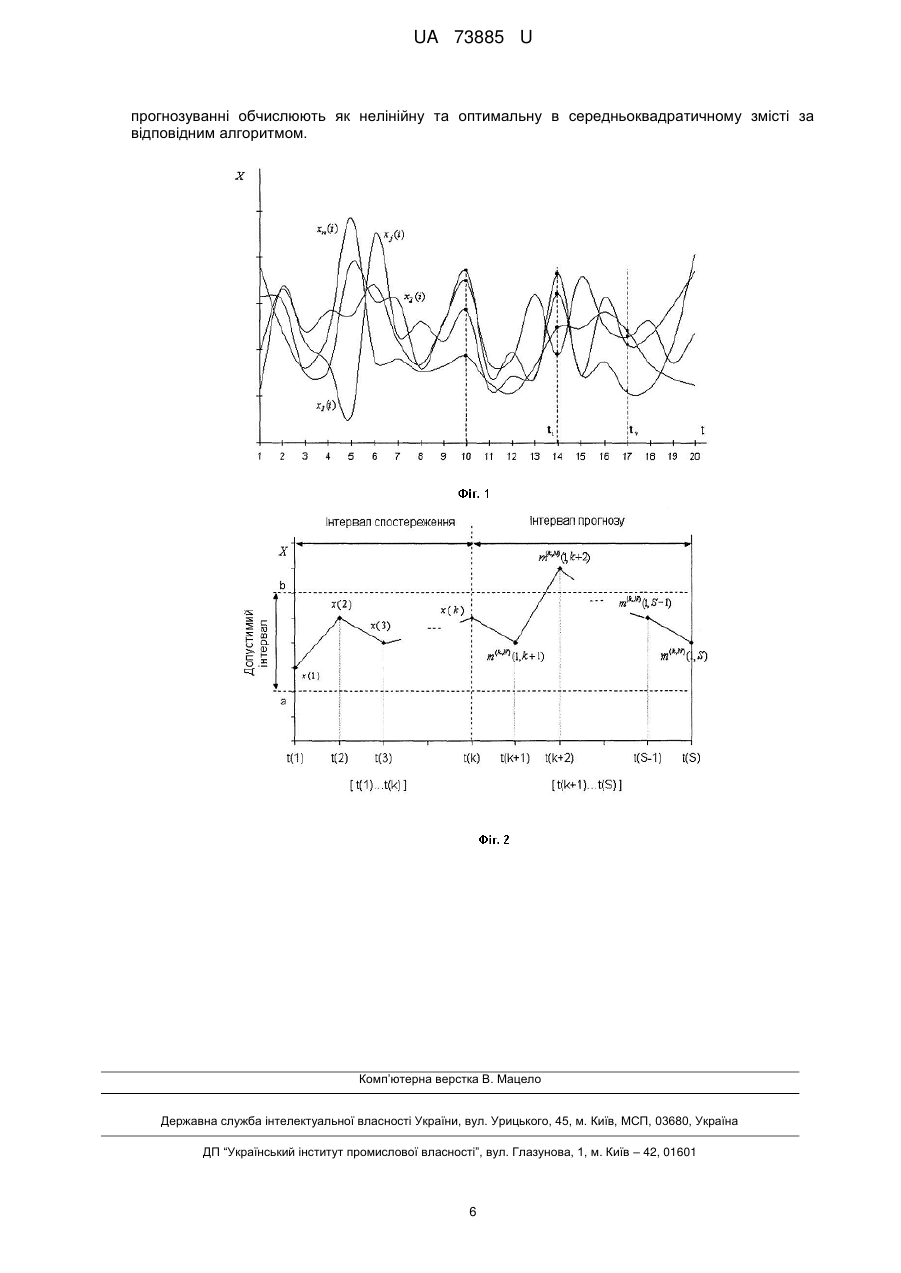
Реферат: UA 73885 U UA 73885 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до обчислювальної техніки та інформаційних технологій і може використовуватись в системах збору, обробки та передавання інформації, зокрема для збору та обробки інформації при прогнозуванні стану технічних об'єктів з метою визначення придатності об'єктів до подальшої експлуатації. Відомо про спосіб прогнозування технічного стану об'єктів, на основі якого реалізовано пристрій прогнозування технічного стану систем [Патент РФ №2409827, МПК G03B23/02, опубл. Бюл. №2, 2011]. При реалізації способу здійснюють збір статистичної інформації щодо змінювання випадкових значень контрольованого параметра шляхом вимірювання і записування в регістр n вузлових значень дискретних сигналів (наприклад напруги), задають період прогнозування (кількість кроків прогнозу), на основі інформації стосовно n вузлових значень дискретних сигналів, яку отримують з регістра, визначають відповідні кінцеві різниці контрольованого параметра та ступінь прогнозуючого поліному, згідно з якою, за допомогою відповідних схем визначають необхідну кількість часових коефіцієнтів Ньютона та необхідну кількість кінцевих різниць, для заданої точки прогнозу обчислюють необхідні значення часових коефіцієнтів Ньютона, які помножують на відповідні значення кінцевих різниць контрольованого параметра. За допомогою відповідного обчислювального блока на основі останнього сигналу уn контрольованого параметра, затриманого за допомогою елемента затримки на часовий інтервал t, та на основі сигналів, що сформовані як добутки коефіцієнтів Ньютона на відповідні значення кінцевих різниць, обчислюють майбутнє (прогнозоване) значення контрольованого параметра з використанням екстраполюючої формули Ньютона. В подальшому на основі інформації про постійну складову похибки вимірювань похибки прогнозу, дисперсію похибки вимірювань, дисперсію похибки прогнозу для і-ої моделі прогнозування та дисперсію похибки прогнозу для j-ої моделі прогнозування, що обчислюються для заданого числа вимірювань і числа кроків прогнозування, за допомогою блока аналізу і корекції обчислюють і аналізують повну похибку прогнозу при використанні різних (i, j) моделей прогнозування (тобто при використанні різних степенів поліномів). На основі аналізу похибки прогнозу уточнюють параметри моделі прогнозування, тобто на основі даних блока аналізу і корекції за допомогою обчислювального блока розраховують прогнозоване значення контрольованого параметра на задану кількість кроків згідно з уточненою моделлю прогнозування. При цьому обчислення прогнозованих значень здійснюють на основі тієї ж серії вимірювань, що використовується і для корекції моделі прогнозування. Наведений спосіб має наступні недоліки: - при формуванні моделі прогнозування використовують тільки значення контрольованого параметра конкретного об'єкта, що досліджується, тобто не враховують апріорну інформацію про випадковий процес з попереднього етапу збору і обробки статистичних даних про функціонування різнотипних об'єктів подібного класу, що суттєво обмежує точність прогнозування (екстраполяції); - в процесі обчислення прогнозних оцінок необхідно постійно уточнювати екстраполяційну процедуру (порядок поліному, схему часових коефіцієнтів) з урахуванням похибки прогнозу; - застосування методу кінцевих різниць, що поставлено в основу способу прогнозування технічного стану об'єктів, дає змогу використовувати довільну кількість значень контрольованого параметру, що визначається порядком поліному, але кінцеві різниці є лінійними функціями і, таким чином, спосіб не використовує нелінійні зв'язки досліджуваного випадкового процесу, що знижує точність і достовірність прогнозування. Найбільш близьким аналогом до запропонованого способу є спосіб прогнозування технічного стану об'єктів [Кудрицкий В.Д. Прогнозирование надежности радиоэлектронных устройств. - К.: Техніка, 1982. - С. 40-49, 132-135]. Згідно з даним способом визначають граничні межі допустимого інтервалу змінювання контрольованого параметра об'єкта контролю, здійснюють збір статистичної інформації щодо змінювання випадкових значень контрольованого параметра в процесі експлуатації об'єктів контролю подібного класу, на основі статистичної інформації обчислюють математичне сподівання і кореляційну функцію відповідного випадкового процесу змінювання контрольованого параметра за множиною реалізацій, з використанням обчислених характеристик здійснюють канонічне розкладання відповідного випадкового процесу, а в подальшому за допомогою екстраполятора реалізують екстраполяційну процедуру прогнозування майбутніх змін відповідного параметра об'єкта контролю, при цьому визначають прогнозовані значення контрольованого параметра у відповідні майбутні моменти часу за відомими значеннями на інтервалі спостереження, після чого перевіряють прогнозоване значення на належність до допустимого інтервалу змінювання контрольованого параметра, у випадку входження до допустимого інтервалу об'єкт контролю вважають працездатним, а у протилежному випадку - фіксують відмову об'єкта контролю. Як технічний об'єкт, для якого здійснюють прогнозування майбутніх змін відповідного 1 UA 73885 U 5 10 15 20 25 30 35 40 45 50 55 60 контрольованого параметра, розглядається імпульсний генератор типу Г5-8. Контрольованим параметром, що визначає технічний стан об'єкта контролю, зокрема імпульсного генератора, є тривалість вихідного імпульсу імпульсного генератора. Екстраполяційну процедуру прогнозування майбутніх змін тривалості вихідного імпульсу імпульсного генератора здійснюють на основі зібраної статистичної інформації для 30 реалізацій випадкового процесу зміни тривалості вихідного імпульсу (тридцяти імпульсних генераторів) протягом 2400 годин. Наведений спосіб має наступні недоліки: - на основі статистичної інформації відносно зміни тривалості вихідного імпульсу партії (множини) імпульсних генераторів обчислюють лише кореляційну функцію, що є частковою (лінійною) характеристикою стохастичних зв'язків випадкового процесу (деякі випадкові процеси взагалі мають тільки нелінійні зв'язки), при цьому побудову канонічного розкладання здійснюють на основі математичного сподівання і кореляційної функції, тобто не враховують моментні функції вищих порядків і, таким чином, канонічне розкладання є досить наближеною і не в повній мірі адекватною моделлю реального випадкового процесу; - процедура екстраполяції на основі канонічного розкладання є лінійною, що суттєво обмежує точність і достовірність прогнозування стану технічних об'єктів у ситуації, коли випадковий процес зміни значень контрольованого параметра, наприклад тривалості вихідного імпульсу імпульсного генератора, характеризується нелінійною складовою. В основу корисної моделі поставлено задачу удосконалення способу прогнозування технічного стану об'єктів шляхом скасування обмеження лінійності на клас випадкових процесів зміни значень контрольованого параметра і підвищення точності екстраполяції за рахунок використання в процедурі прогнозування нелінійних стохастичних зв'язків. Як контрольований параметр можуть бути використані такі реальні контрольовані величини і сигнали, як напруга, частота, величина струму, тривалість вихідного імпульсу, температура, тиск, вологість, частота обертання вала, кількість помилок при тестуванні відповідного програмного забезпечення та ін. в залежності від типу технічних об'єктів, для яких необхідно здійснювати прогнозування майбутніх змін відповідного контрольованого параметра. Поставлена задача вирішується тим, що визначають граничні межі допустимого інтервалу змінювання контрольованого параметра об'єкта контролю, здійснюють збір статистичної інформації щодо змінювання випадкових значень контрольованого параметра в процесі експлуатації об'єктів контролю подібного класу, на основі статистичної інформації обчислюють моментні функції відповідного випадкового процесу змінювання контрольованого параметра за множиною реалізацій, з використанням моментних функцій здійснюють канонічне розкладання відповідного випадкового процесу, а в подальшому за допомогою екстраполятора реалізують екстраполяційну процедуру прогнозування майбутніх змін відповідного параметра об'єкта контролю, при цьому визначають прогнозовані значення контрольованого параметра у відповідні майбутні моменти часу за відомими значеннями на інтервалі спостереження, після чого перевіряють прогнозоване значення на належність до допустимого інтервалу змінювання контрольованого параметра, у випадку входження до допустимого інтервалу об'єкт контролю вважають працездатним, а у протилежному випадку - фіксують відмову об'єкта контролю, згідно з корисною моделлю, при формуванні канонічного розкладання відповідного випадкового процесу враховують змішані моментні функції будь-якого порядку нелінійності між двома довільними моментами часу, використовують дану апріорну інформацію в подальшому визначенні параметрів екстраполятора, оцінку майбутнього значення контрольованого параметра при прогнозуванні обчислюють як нелінійну та оптимальну в середньоквадратичному змісті за відповідним алгоритмом. Запропонований спосіб прогнозування технічного стану об'єктів забезпечує попередню побудову поліноміального канонічного розкладання, формування на його основі процедури екстраполяції і подальшому визначенні майбутніх значень контрольованого параметра як оптимальних нелінійних оцінок. При цьому суттєво підвищується достовірність прогнозу стану технічного об'єкта, клас якого визначає тип контрольованого параметра, зокрема для імпульсних генераторів таким контрольованим параметром може бути тривалість або амплітуда вихідного імпульсу. Перевагою запропонованого способу є також його універсальність в застосуванні до широкого класу різнотипних технічних об'єктів, тобто спосіб може бути надійно реалізований для прогнозування стану технічних об'єктів різних класів, зокрема пристроїв електронної обчислювальної техніки, джерел опорної напруги, резонансних перетворювачів напруги, електродинамічних віброгасників, вимірювальних компонентів систем автоматичного керування, парових котлів, газогенераторів та інших технічних об'єктів, при забезпеченні можливості вимірювання та збору статистичної інформації відносно відповідних контрольованих параметрів. 2 UA 73885 U 5 Фіг. 1 та фіг. 2 пояснюють суть запропонованого способу прогнозування технічного стану об'єктів. Зокрема, на фіг. 1 показані можливі реалізації x 1(i), x2(i), ..., xn(i) випадкового процесу зміни значень контрольованого параметра X для множини об'єктів подібного класу, що є статистичною інформацією для обчислення стохастичних характеристик. На фіг. 1 також показано переріз ансамблю реалізацій х1(і), х2(і), ..., хn(і) для моменту часу, яким пояснюється процедура обчислення математичного сподівання i, i 1, S та змішані моменти різних порядків i ih , ,h 1, , ,i 1 S за числом реалізацій. На фіг. 2 для , об'єкта, технічний стан якого прогнозується, показана реалізація параметра X в точках спостереження t i ,i 1,k (інтервал спостереження, фіг. 2) та прогнозні оцінки для моментів часу 10 15 20 25 t i , i k 1, S (інтервал прогнозу, фіг. 2). Допустимий інтервал [a, b] визначає граничні межі допустимої зони змінювання контрольованого параметра об'єкта, зокрема, в момент часу t k+2, коли прогнозоване значення параметра X перетинає границі допустимого інтервалу [a, b], стан об'єкта контролю ідентифікують як відмову. Суть запропонованого способу прогнозування технічного стану об'єктів полягає в наступному. Для конкретного технічного об'єкта, стан якого необхідно прогнозувати, визначають тип контрольованого параметра. Наприклад для імпульсного генератора таким контрольованим параметром може бути тривалість вихідного імпульсу, тобто при реалізації запропонованого способу прогнозування стану імпульсного генератора необхідно здійснювати прогнозування майбутніх змін тривалості вихідного імпульсу як відповідного контрольованого параметра імпульсного генератора. На попередньому етапі задають граничні межі [a, b] допустимого інтервалу змінювання контрольованого параметра X об'єкта контролю, а також здійснюють збір статистичної інформації щодо змінювання випадкових значень контрольованого параметра X в процесі експлуатації об'єктів подібного класу (фіг. 1): xj (і), i 1, , j 1,n, і - порядковий номер моменту часу t i , i 1,S , j - номер об'єкта, n - кількість об'єктів, що досліджується. На основі статистичної інформації обчислюють моментні функції відповідного випадкового процесу змінювання контрольованого параметра за множиною реалізацій xj (і), i 1, , j 1,n, зокрема: - математичне сподівання n i 30 x j i j 1 n , i 1, S ; - змішані моменти порядку h, ,h 1, x j x j i ih n i ih 35 j 1 , , h 1, , , i 1, S n 1 де ,i - довільні моменти часу t,ti (фіг. 1), для яких визначаються стохастичні властивості випадкового процесу; 2N - найвищий порядок стохастичного зв'язку, що попередньо визначається, наприклад на основі застосування статистичного F - критерію Фішера для аналізу значущості стохастичного зв'язку; X(),X(i) - випадкові значення параметру X, відповідно, в моменти часу t і ti. У подальшому з використанням моментних функцій i, i 1 S ; , i ih , ,h 1 , ,i 1 S здійснюють поліноміальне канонічне розкладання , , 40 відповідного випадкового процесу i i де i 1 W () 1 i W i,i 1,S, 1 1 ( W ) , 1 N, 1 S , , ( 2 D W ) , 1,N, 1, S некорельовані та випадкові математичним коефіцієнти з сподіванням дисперсіями ( W ) 0, 1 N, 1 S ; , , ( ) i, , h 1 N, , i 1 S - невипадкові координатні функції, кожна з яких характеризує зв'язок між , , h 45 відповідними елементами X() і X (і). h 3 UA 73885 U Далі визначають ( ) i, , h 1 N, , i 1 S , , h параметри за канонічного розкладання умови точного представлення D , 1 N, 1 S , , та випадкового процесу в точках дискретизації t i , i 1,S (фіг.2) і забезпечення мінімуму середнього квадрату похибки наближення в проміжках [ti,·ti+1] за наступними рекурентними формулами з пам'яттю: W i 1 i i i D W 2 2 1 1 ( 2 D W ) 2 D j j D j j , 1,N, 1, S; 1j 1 j 1 5 h h 2 1 1 1j 1 h j 1 j ) D j (hj i D j j hj i , h 1,N, , i 1 S , , На наступному кроці за допомогою вищенаведеного канонічного розкладання i i 10 i 1 W () 1 i W i, i 1,S, 1 1 реалізують екстраполяційну процедуру нелінійного прогнозування майбутніх змін відповідного параметра об'єкта контролю. При цьому визначають прогнозовані значення контрольованого параметра X у майбутні моменти часу t i ,i k 1, S за відомими значеннями x(), 1, k на інтервалі спостереження [ti,·ti+1] (фіг. 2): m,q 1 h,i x h m,q 1 q, q i, q 1 x x h , m,q h,i ,N1 x 1, 1 q, 1 i, q 1 h,i x m m 15 x x де h та i - відповідно степінь і момент часу майбутнього значення x h i, i k 1, S , що прогнозується; μ - поточний момент часу t вимірювання контрольованого параметра X; q поточна зростаюча, де N - степінь значення χ(), що використовується в черговому циклі рекурентної процедури уточнення прогнозованого значення параметра контролю. Вираз m,q h,i h i x j , 1 1 j 1 ; x j , j 1 q для h = 1, , k є незміщеною оптимальною , , , , x оцінкою m x k, 1,i, i k 1, S майбутнього значення xi, i k 1, S контрольованого параметра X, при 20 умові, що для обчислення даної оцінки використані всі значення x j , j 1, , 1,k, які отримані на інтервалі спостереження t , 1,k . Вираз для оцінки m k, 1,i, i k 1, S має також явну форму запису x mk, 1 i , x k z j k1 j i 1 1, i k 1,S, 1j 1 де 25 1 1 j i, 1 1 j; 1 j mod , 1 j j 1 j mod , / 1, 1 j, / 0; j mod , / , j 1 j, / 0; Точність прогнозу визначають за формулою для середнього квадрату похибки екстраполяції k 2 2 j 2 i / x j , j 1 1 1 k m k, 1 1 i i i2 Wj 1 i , , , , , x 1j 1 i k 1 S , 30 На наступному етапі перевіряють прогнозоване значення m x k, 1,i, i k 1, S на належність до допустимого інтервалу [a,b] змінювання контрольованого параметра. У випадку входження до допустимого інтервалу m x k, 1,i a,b об'єкт контролю вважають працездатним, а у протилежному випадку m k, 1,i a,b - фіксують відмову об'єкта контролю. x Реалізація запропонованого способу (з метою його апробації) була здійснена для прогнозування технічного стану імпульсного генератору типу Г5-8 з використанням як контрольованого параметра тривалості вихідного імпульсу імпульсного генератора. При цьому 4 UA 73885 U 5 як статистична інформація використовувалась зібрана статистична інформація для 30 реалізацій випадкового процесу зміни тривалості вихідного імпульсу для партії з тридцяти різних імпульсних генераторів протягом 2400 годин [Кудрицкий В.Д. Прогнозирование надежности радиоэлектронных устройств. - К.: Техніка, 1982. - С. 40-49, 132-135; Кудрицкий В.Д. Каноническое представление случайных функций в задачах прогнозирования надежности // Автоматика и телемеханика, 1970. - №1. - С. 170-175]. На основі даної статистики визначено канонічне розкладання випадкового процесу зміни тривалості вихідного імпульсу імпульсного генератора, що забезпечує реалізацію запропонованого способу з врахуванням нелінійних зв'язків до 6-го порядку включно: i ih , ,h 1,3, ,i 120 . Екстраполяційну , процедуру прогнозування майбутніх змін тривалості вихідного імпульсу імпульсного генератора здійснювали шляхом комп'ютерного моделювання роботи відповідних обчислювальних блоків, що забезпечують послідовність здійснення необхідних операцій і процесів на кожному кроці реалізації запропонованого способу. В результаті за допомогою комп'ютерного моделювання компонентів пристрою, що реалізує запропонований спосіб прогнозування технічного стану об'єктів, для кожної з тридцяти реалізацій по набору значень тривалості вихідного імпульсу, що належать допусковому інтервалу [а=0,06 мкс; b=0,14 мкс], обчислювалась прогнозна оцінка контрольованого параметра в моменти часу, для яких за статистичними даними зафіксовані відмови генераторів імпульсів. Запропонований спосіб для всіх 30-ти реалізацій підтвердив відмови (при цьому обчислені прогнозовані (майбутні) значення тривалості вихідного імпульсу не увійшли в допустимий інтервал [а=0,06 мкс; b=0,14 мкс]). Разом з тим, реалізація (шляхом комп'ютерного моделювання) способу прогнозування, що прийнятий за прототип, дозволила зареєструвати тільки 28 відмов (з 30-ти можливих). Таким чином, запропонований спосіб має наступні відмінні ознаки: - на основі зібраної статистичної інформації обчислюють не тільки кореляційну функцію, а й змішані моментні функції будь-якого порядку нелінійності i ih , h 2, що є вичерпною характеристикою стохастичних зв'язків випадкового процесу між двома довільними моментами часу; - нелінійні моментні функції використовуються при побудові канонічного розкладання випадкового процесу, що дозволяє максимально наблизити математичну модель до реального випадкового процесу; - в процедурі прогнозу суттєво збільшується об'єм використаної апріорної інформації про випадковий процес, що дозволяє суттєво підвищити точність і достовірність прогнозування стану технічних об'єктів; - запропонований спосіб не має обмежень на клас (тип) технічних об'єктів, для яких необхідно прогнозувати майбутні значення контрольованих параметрів. Позитивний ефект проявляється в тому, що у порівнянні з найближчим аналогом даний спосіб прогнозування технічного стану об'єктів дозволяє підвищити точність визначення майбутніх значень контрольованого параметра (5-7% в залежності від характера нелінійних зв'язків) за рахунок використання в процедурі екстраполяції значно більшого об'єму апріорної інформації про об'єкт, що досліджується. 10 15 20 25 30 35 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 60 Спосіб прогнозування технічного стану об'єктів, згідно з яким визначають граничні межі допустимого інтервалу змінювання контрольованого параметра об'єкта контролю, здійснюють збір статистичної інформації щодо змінювання випадкових значень контрольованого параметра в процесі експлуатації об'єктів контролю подібного класу, на основі статистичної інформації обчислюють моментні функції відповідного випадкового процесу змінювання контрольованого параметра за множиною реалізацій, з використанням моментних функцій здійснюють канонічне розкладання відповідного випадкового процесу, а в подальшому за допомогою екстраполятора реалізують екстраполяційну процедуру прогнозування майбутніх змін відповідного параметра об'єкта контролю, при цьому визначають прогнозовані значення контрольованого параметра у відповідні майбутні моменти часу за відомими значеннями на інтервалі спостереження, після чого перевіряють прогнозоване значення на належність до допустимого інтервалу змінювання контрольованого параметра, у випадку входження до допустимого інтервалу об'єкт контролю вважають працездатним, а у протилежному випадку - фіксують відмову об'єкта контролю, який відрізняється тим, що при формуванні канонічного розкладу відповідного випадкового процесу враховують змішані моментні функції будь-якого порядку нелінійності між двома довільними моментами часу, використовують дану апріорну інформацію в подальшому визначенні параметрів екстраполятора, оцінку майбутнього значення контрольованого параметра при 5 UA 73885 U прогнозуванні обчислюють як нелінійну та оптимальну в середньоквадратичному змісті за відповідним алгоритмом. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for prediction of object technical state
Автори англійськоюAtamaniuk Ihor Petrovych, Kondratenko Yurii Panteliiovych
Назва патенту російськоюСпособ прогнозирования технического состояния объектов
Автори російськоюАтаманюк Игорь Петрович, Кондратенко Юрий Пантелеевич
МПК / Мітки
МПК: G05B 23/02
Мітки: технічного, спосіб, прогнозування, стану, об'єктів
Код посилання
<a href="https://ua.patents.su/8-73885-sposib-prognozuvannya-tekhnichnogo-stanu-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб прогнозування технічного стану об’єктів</a>
Спосіб контролю та прогнозування технічного стану біполярних транзисторів
Номер патенту: 32322
Опубліковано: 15.12.2000
Автори: Білець Анатолій Іванович, Лосовський Володимир Олександрович
МПК: G01R 31/00, G01R 31/12
Мітки: спосіб, контролю, стану, прогнозування, технічного, транзисторів, біполярних
Текст:
...стану біполярних транзисторів за щільністю низькочастотного флікерного шуму відповідно з винаходом вимірюють ширину бістабільної зони, для чого утворюють послідовний нелінійний контур, з'єднують індуктив ність з колекторним переходом випробуваного транзистора, потім збуджують контур генератором гармонічних коливань з амплітудою та частотою, на якій виникає бістабільна зона і за змінами смуги частоти бістабільної зони визначають залишок...
Інформаційно-діагностичний комплекс моніторингу і прогнозування технічного стану інженерно-будівельних споруд
Номер патенту: 73310
Опубліковано: 25.09.2012
Автори: Цибульник Сергій Олексійович, Шевчук Дмитро Володимирович, Жуковський Юрій Григорович, Кузько Олександр Васильович, Бурау Надія Іванівна
МПК: G01M 7/00
Мітки: комплекс, стану, моніторингу, інженерно-будівельних, споруд, технічного, прогнозування, інформаційно-діагностичний
Формула / Реферат:
Інформаційно-діагностичний комплекс моніторингу і прогнозування технічного стану інженерно-будівельних споруд, що містить блок виміру прискорень коливань об'єкту, блок виміру нахилу об'єкту, блок виміру вібрації, блок виміру напружень і/або амплітуд коливань, і/або прогинів, і/або навантажень, і/або осадки об'єкту, і/або геодезичних параметрів, і/або контролю тріщин, стиків, швів, блок відображення поточного та прогнозного стану об'єкту,...
Спосіб прогнозування технічного ресурсу елементів устаткування систем контролю та керування
Номер патенту: 39761
Опубліковано: 10.03.2009
Автори: Маловик Костянтин Миколайович, Юдін Андрій Володимирович
МПК: H05K 10/00
Мітки: прогнозування, елементів, систем, керування, технічного, ресурсу, контролю, спосіб, устаткування
Формула / Реферат:
Спосіб прогнозування технічного ресурсу елементів устаткування систем контролю та керування, який полягає в тому, що зміни характеристик надійності елементів устаткування систем контролю та керування визначають за щільністю розподілу, використовуючи квантильні межі, який відрізняється тим, що використовують джерела критичних впливаючих дій та встановлені вибірки елементів з заданим набором характеристик, впливають на елемент контрольними...
Спосіб контролю та оцінки технічного стану тепловиділяючих об`єктів, що містять однотипні вузли, термографічним методом
Номер патенту: 98981
Опубліковано: 10.07.2012
Автори: Стороженко Володимир Олександрович, Малик Світлана Борисівна, Аведян Валерій Шалікович
МПК: G01J 5/00, G01K 17/00
Мітки: технічного, об'єктів, містять, однотипні, методом, тепловиділяючих, стану, контролю, вузлі, термографічним, оцінки, спосіб
Формула / Реферат:
Спосіб контролю та оцінки технічного стану тепловиділяючих об'єктів, що містять однотипні вузли, термографічним методом, що включає безконтактну реєстрацію температурного поля контрольованого об'єкта і формування термограм його поверхні, обробку термограм з отриманням термографічної інформаційної функції (ТІФ), порівняння цієї ТІФ з її еталонним значенням за встановленим критерієм дефектності, який відрізняється тим, що використовуються три...
Спосіб вібродіагностики технічного стану машини
Номер патенту: 51154
Опубліковано: 15.11.2002
Автор: Нагорний В'ячеслав Михайлович
МПК: G01M 7/00
Мітки: машини, спосіб, вібродіагностики, стану, технічного
Формула / Реферат:
1. Спосіб вібродіагностики технічного стану машини, який включає періодичне проведенння кількаразових вимірів амплітуди коливань корпусу машини у звуковому діапазоні частот, що містить частоти коливань вибраних вузлів машини, у найближчих до них на корпусі машини точках контролю, по черзі у вибраних у цих точках напрямках, усередненні результатів вимірів, апроксимації їх функцією, що відображає фізику руйнування машини, визначенні при цьому...
Попередній патент: Інноваційна автоматизована система управління розвитком техногенного регіону
Наступний патент: Привід круглов’язальної машини
Випадковий патент: Установка для безреагентного знезараження води