Пристрій для компенсації параметричної несиметрії в дводвигунному тяговому асинхронному електроприводі
Номер патенту: 75120
Опубліковано: 26.11.2012
Автори: Сергієнко Сергій Анатолійович, Шокарьов Дмитро Анатолійович, Бялобржеський Олексій Володимирович, Іващенко Вікторія Віталіївна

Формула / Реферат
1. Пристрій для компенсації параметричної несиметрії в дводвигунному тяговому асинхронному електроприводі, що одержує живлення від двох джерел напруги різного рівня, містить два асинхронних електродвигуни й перетворювачі, які складаються з однофазних інверторних IGB транзисторних мостів, до вихідних фаз яких приєднані відповідні обмотки двигунів електрично не зв'язані між собою, що утворюють в кожному двигуні схему "розімкнутий трикутник", який відрізняється тим, що в систему управління введені датчики струму, мікропроцесорний блок корекції несиметрії та драйвери управління автономними інверторами напруги.
2. Пристрій за п. 1, який відрізняється тим, що входи датчиків струму з'єднані послідовно з обмотками двигунів, виходи датчиків з'єднані з входами аналого-цифрового перетворювача, вихід якого з'єднаний з входом мікропроцесорного блока корекції несиметрії, вихід якого з'єднано з входом цифро-аналогового перетворювача, виходи якого з'єднані з керуючими входами драйверів управління, виходи яких з'єднані з керуючими входами автономних інверторів напруги.
Текст
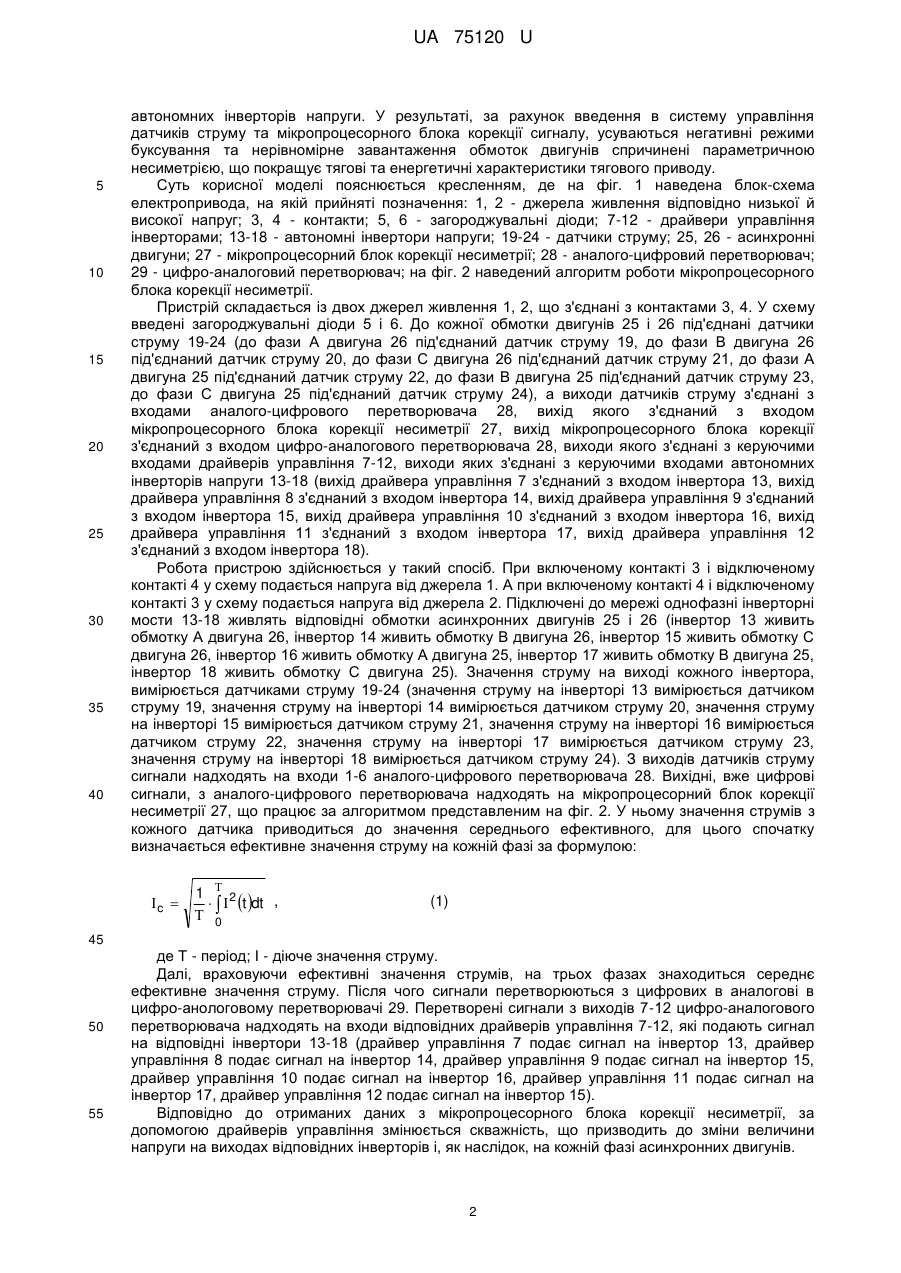
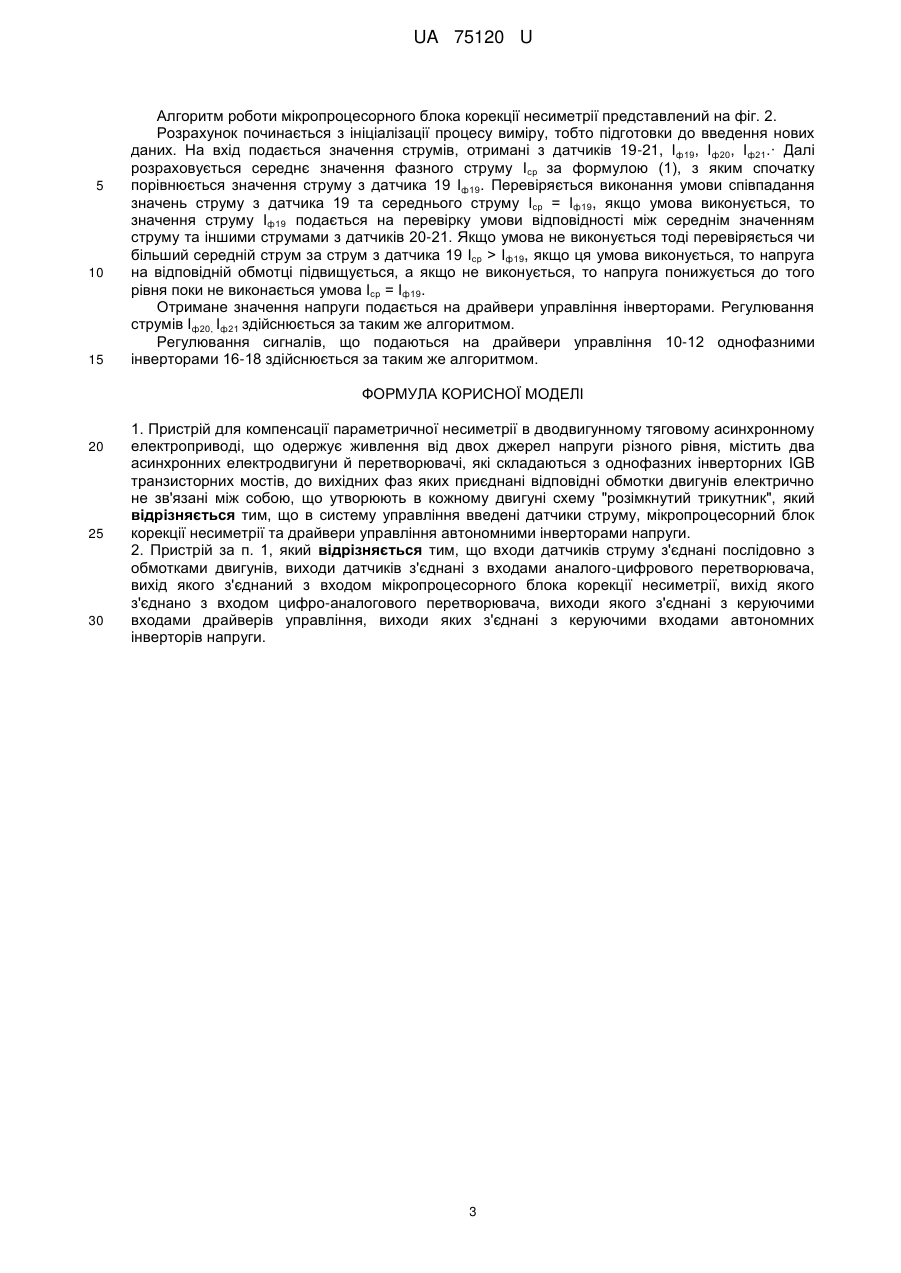
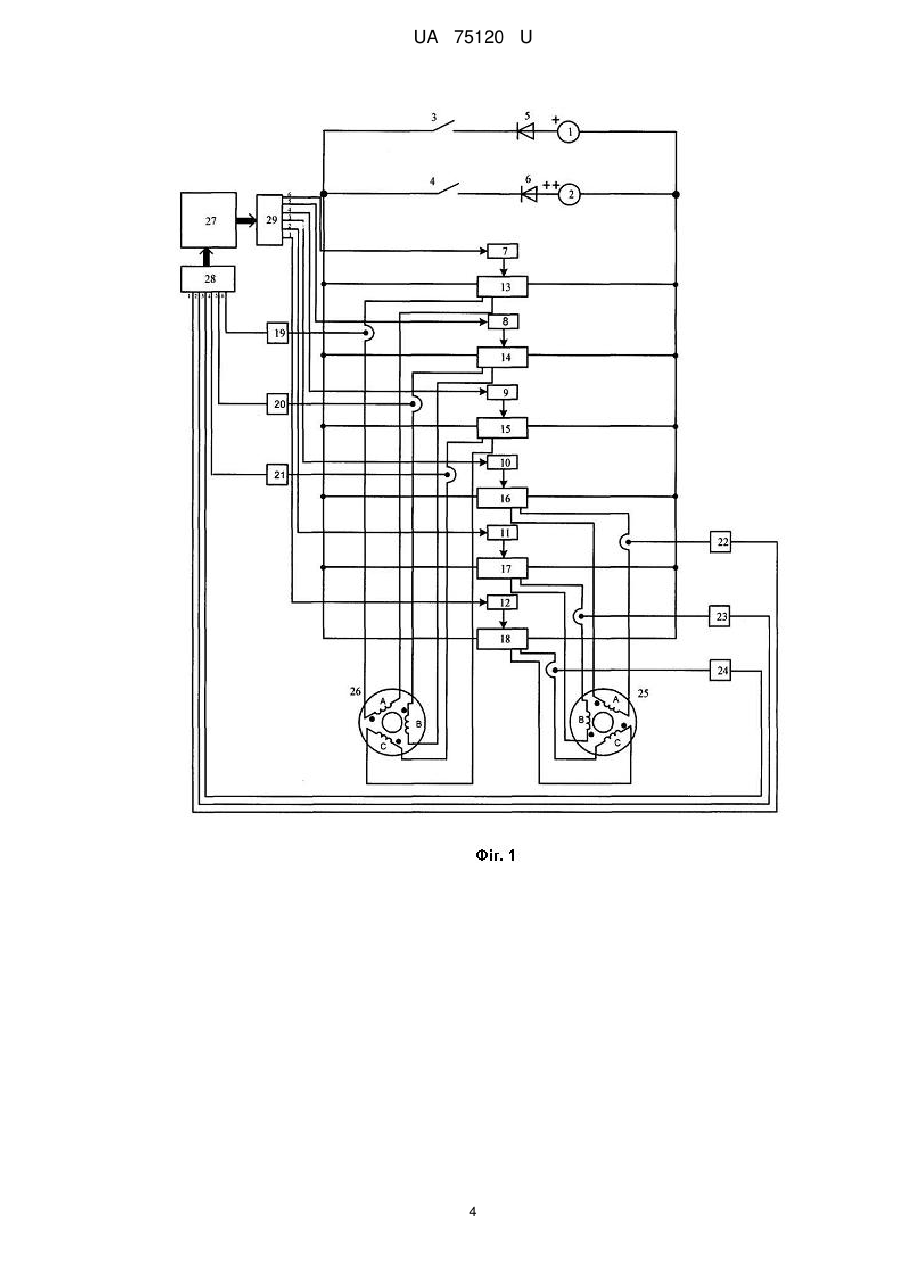
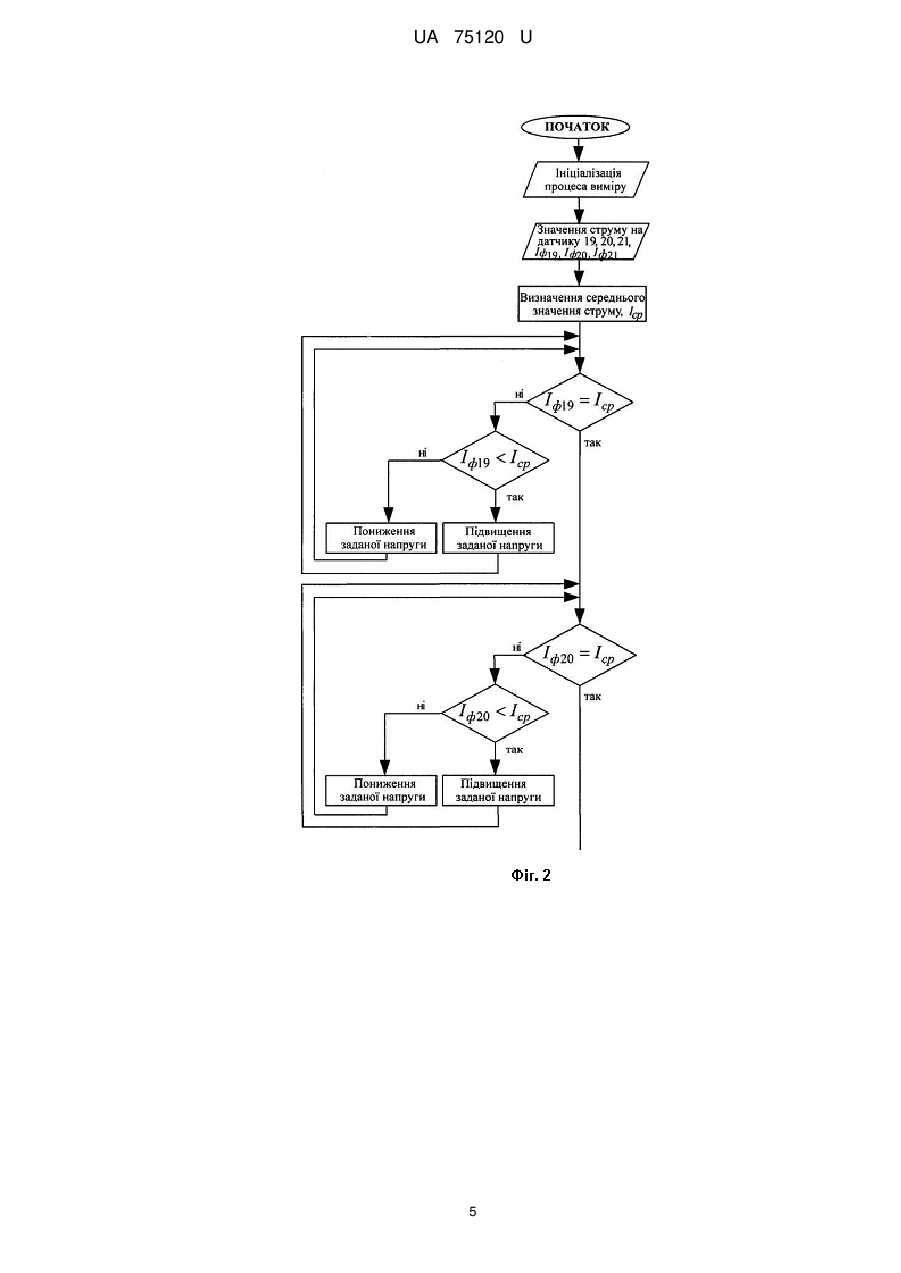
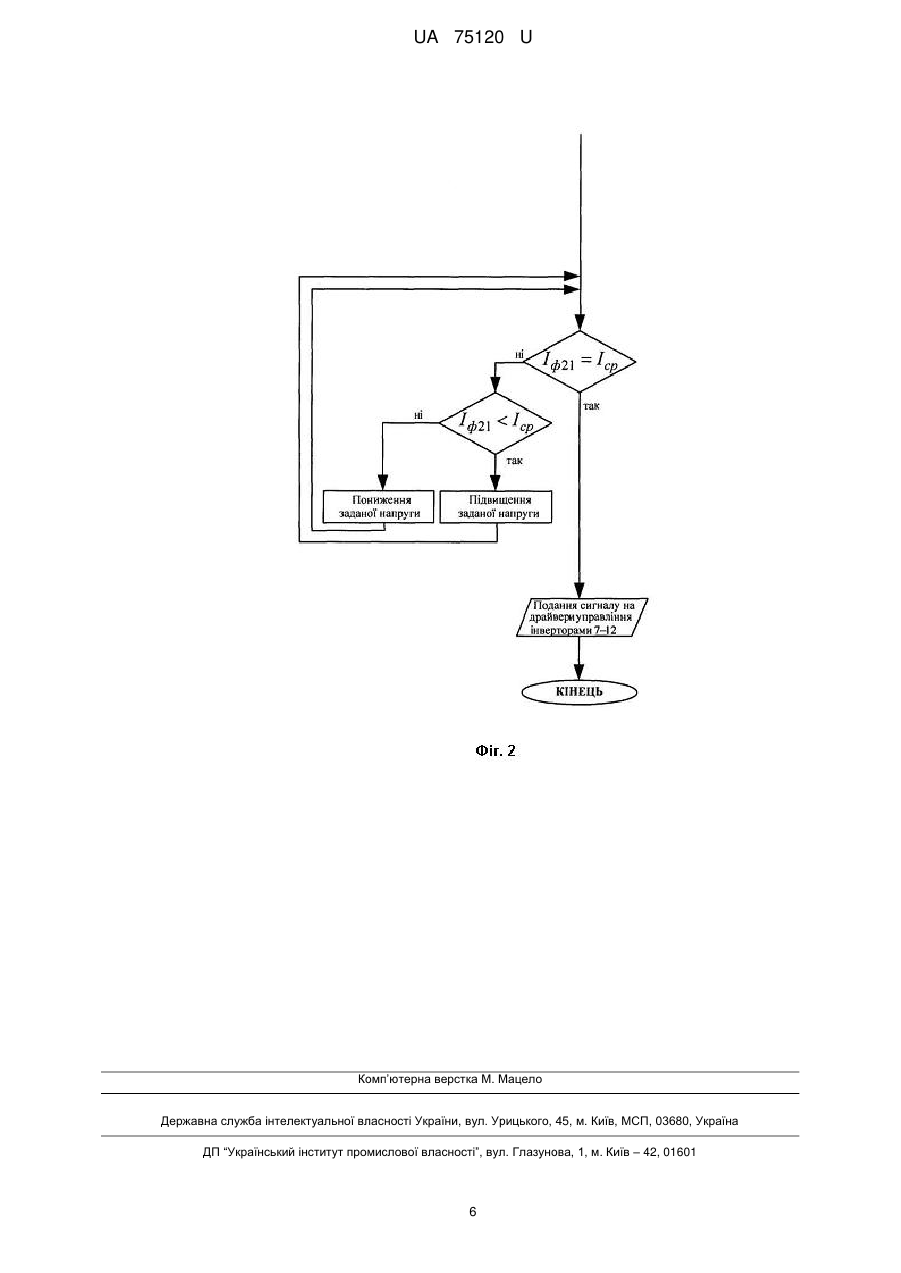
Реферат: Пристрій для компенсації параметричної несиметрії в дводвигунному тяговому асинхронному електроприводі належить до електротехніки й може бути використаний в тягових електроприводах рудничних двосистемних двоосьових електровозів, що одержують живлення або від власної акумуляторної батареї, або від контактної мережі. UA 75120 U (12) UA 75120 U UA 75120 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до електротехніки й може бути використана в тягових електроприводах рудничних двосистемних двоосьових електровозів, що одержують живлення або від власної акумуляторної батареї або від контактної мережі. Відоме технічне рішення (Синчук И.О., Чернышев А.А. и др. "Полупроводниковые преобразователи электрической энергии в структурах электроприводов. Схемотехника и принципы управления" под редакцией д.т.н. Синчука О.Н., Кременчугский национальный университет имени Михаила Остроградского. Кременчуг, 2008. - С. 73, рис. 5.25), в якому випрямні модулі з'єднуються послідовно або паралельно. Принцип дії даної схеми полягає у тому, що двигуни під'єднуються послідовно при нижньому рівні регулювання напруги на кожному двигуні, а при паралельному з'єднанні двигунів реалізується верхній рівень регулювання напруги на кожному двигуні. У зв'язку з цим у схему введені додаткові елементи зустрічно включені тиристори на кожну фазу двигуна. Спільними ознаками з пропонованим рішенням є можливість нівелювання рівнів напруг на обмотках асинхронного двигуна. Недоліком зазначеного пристрою є те, що для перебудови структур у цих електроприводах використовують додаткові тиристори. Більше того в цих схемах задіяні всі тиристори, що веде до збільшення втрат потужності. Відоме технічне рішення (Чернов Е.А., Кузьмин В.П. "Комплектные электроприводы станков с ЧПУ". - Волго-Вятское кн. изд-во, 1989. - С. 255, рис. 6.25), що забезпечує живлення розімкнених обмоток асинхронного двигуна за допомогою транзисторного інвертора головного привода, що складається з трьох однофазних мостових інверторів, які живлять відповідні обмотки двигунів, а також регуляторів струму, що забезпечують формування сигналів управління зворотнім зв'язком по струму. Спільними ознаками з пропонованим рішенням є те, що у схемі присутні три однофазні інвертори, асинхронний двигун з розімкненими обмотками і датчики струму, що контролюють фазний струм в обмотках двигуна. Недоліком зазначеного пристрою є те, що система одержує живлення від напруги одного рівня, що не задовольняє вимоги щодо роботи контактно-акумуляторного електровоза, що одержує живлення або від контактної мережі, або від акумуляторної батареї, встановленої на самому електровозі, а також схема не забезпечує живлення дводвигунного привода, а також у схемі відсутній блок корекції несиметрії. Найбільш близьким технічним рішенням корисної моделі, що заявляється, є пристрій (пат. UA № 67134, МПК (Н02М 7/00, В61С 9/00), Тяговий асинхронний електропривод, Шокарьов Д.А., Скапа Є.І., опубл. в 2011р), що містить два асинхронних електродвигуни й перетворювачі, що складаються з однофазних інверторних IGB транзисторних мостів, до вихідних фаз яких приєднані відповідні обмотки двигунів електрично не зв'язані між собою, що утворюють в кожному двигуні схему "розімкнутий трикутник". Спільними ознаками з пропонованим рішенням є те, що тяговий привод електровоза одержує живлення від двох джерел напруги різного рівня, містить два асинхронних двигуни, обмотки яких електрично не зв'язані між собою та перетворювачі, які складаються з однофазних інверторних IGB транзисторних мостів Недоліком зазначеного пристрою є відсутність в системі управління контролю за фазними струмами, що унеможливлює компенсацію параметричної несиметрії, яка виникає через відсутність електричного зв'язку між статорними обмотками тягового асинхронного двигуна що призводить до нерівномірності навантаження на двигунах і, як наслідок, пробуксування колісних пар. В основу корисної моделі поставлена задача покращення енергетичних і тягових характеристик рудничного двосистемного електровоза шляхом введення в систему управління датчиків струму, які дозволяють контролювати значення струмів на кожній фазі, і мікропроцесорного блока корекції несиметрії, який формує сигнал управління на зміну величини напруги на виході кожної фази автономного інвертора напруги. Поставлена задача вирішується тим, що тяговий привод електровоза одержує живлення від двох джерел напруги різного рівня, містить два асинхронні двигуни і перетворювачі, які складаються з однофазних інверторних IGB транзисторних мостів, до вихідних фаз яких приєднані відповідні обмотки двигунів електрично не зв'язані між собою, що утворюють у кожному двигуні схему "розімкнутий трикутник", згідно з корисною моделлю, в кожну обмотку двигунів введені датчики струму, виходи яких з'єднані з входами аналого-цифрового перетворювача, вихід якого з'єднаний з входом мікропроцесорного блока корекції несиметрії, вихід якого з'єднано з входом цифро-аналогового перетворювача, виходи якого з'єднані з керуючими входами драйверів управління, виходи яких з'єднані з керуючими входами 1 UA 75120 U 5 10 15 20 25 30 35 40 автономних інверторів напруги. У результаті, за рахунок введення в систему управління датчиків струму та мікропроцесорного блока корекції сигналу, усуваються негативні режими буксування та нерівномірне завантаження обмоток двигунів спричинені параметричною несиметрією, що покращує тягові та енергетичні характеристики тягового приводу. Суть корисної моделі пояснюється кресленням, де на фіг. 1 наведена блок-схема електропривода, на якій прийняті позначення: 1, 2 - джерела живлення відповідно низької й високої напруг; 3, 4 - контакти; 5, 6 - загороджувальні діоди; 7-12 - драйвери управління інверторами; 13-18 - автономні інвертори напруги; 19-24 - датчики струму; 25, 26 - асинхронні двигуни; 27 - мікропроцесорний блок корекції несиметрії; 28 - аналого-цифровий перетворювач; 29 - цифро-аналоговий перетворювач; на фіг. 2 наведений алгоритм роботи мікропроцесорного блока корекції несиметрії. Пристрій складається із двох джерел живлення 1, 2, що з'єднані з контактами 3, 4. У схему введені загороджувальні діоди 5 і 6. До кожної обмотки двигунів 25 і 26 під'єднані датчики струму 19-24 (до фази А двигуна 26 під'єднаний датчик струму 19, до фази В двигуна 26 під'єднаний датчик струму 20, до фази С двигуна 26 під'єднаний датчик струму 21, до фази А двигуна 25 під'єднаний датчик струму 22, до фази В двигуна 25 під'єднаний датчик струму 23, до фази С двигуна 25 під'єднаний датчик струму 24), а виходи датчиків струму з'єднані з входами аналого-цифрового перетворювача 28, вихід якого з'єднаний з входом мікропроцесорного блока корекції несиметрії 27, вихід мікропроцесорного блока корекції з'єднаний з входом цифро-аналогового перетворювача 28, виходи якого з'єднані з керуючими входами драйверів управління 7-12, виходи яких з'єднані з керуючими входами автономних інверторів напруги 13-18 (вихід драйвера управління 7 з'єднаний з входом інвертора 13, вихід драйвера управління 8 з'єднаний з входом інвертора 14, вихід драйвера управління 9 з'єднаний з входом інвертора 15, вихід драйвера управління 10 з'єднаний з входом інвертора 16, вихід драйвера управління 11 з'єднаний з входом інвертора 17, вихід драйвера управління 12 з'єднаний з входом інвертора 18). Робота пристрою здійснюється у такий спосіб. При включеному контакті 3 і відключеному контакті 4 у схему подається напруга від джерела 1. А при включеному контакті 4 і відключеному контакті 3 у схему подається напруга від джерела 2. Підключені до мережі однофазні інверторні мости 13-18 живлять відповідні обмотки асинхронних двигунів 25 і 26 (інвертор 13 живить обмотку А двигуна 26, інвертор 14 живить обмотку В двигуна 26, інвертор 15 живить обмотку С двигуна 26, інвертор 16 живить обмотку А двигуна 25, інвертор 17 живить обмотку В двигуна 25, інвертор 18 живить обмотку С двигуна 25). Значення струму на виході кожного інвертора, вимірюється датчиками струму 19-24 (значення струму на інверторі 13 вимірюється датчиком струму 19, значення струму на інверторі 14 вимірюється датчиком струму 20, значення струму на інверторі 15 вимірюється датчиком струму 21, значення струму на інверторі 16 вимірюється датчиком струму 22, значення струму на інверторі 17 вимірюється датчиком струму 23, значення струму на інверторі 18 вимірюється датчиком струму 24). З виходів датчиків струму сигнали надходять на входи 1-6 аналого-цифрового перетворювача 28. Вихідні, вже цифрові сигнали, з аналого-цифрового перетворювача надходять на мікропроцесорний блок корекції несиметрії 27, що працює за алгоритмом представленим на фіг. 2. У ньому значення струмів з кожного датчика приводиться до значення середнього ефективного, для цього спочатку визначається ефективне значення струму на кожній фазі за формулою: c 1 2 t dt , 0 (1) 45 50 55 де Τ - період; І - діюче значення струму. Далі, враховуючи ефективні значення струмів, на трьох фазах знаходиться середнє ефективне значення струму. Після чого сигнали перетворюються з цифрових в аналогові в цифро-анологовому перетворювачі 29. Перетворені сигнали з виходів 7-12 цифро-аналогового перетворювача надходять на входи відповідних драйверів управління 7-12, які подають сигнал на відповідні інвертори 13-18 (драйвер управління 7 подає сигнал на інвертор 13, драйвер управління 8 подає сигнал на інвертор 14, драйвер управління 9 подає сигнал на інвертор 15, драйвер управління 10 подає сигнал на інвертор 16, драйвер управління 11 подає сигнал на інвертор 17, драйвер управління 12 подає сигнал на інвертор 15). Відповідно до отриманих даних з мікропроцесорного блока корекції несиметрії, за допомогою драйверів управління змінюється скважність, що призводить до зміни величини напруги на виходах відповідних інверторів і, як наслідок, на кожній фазі асинхронних двигунів. 2 UA 75120 U 5 10 15 Алгоритм роботи мікропроцесорного блока корекції несиметрії представлений на фіг. 2. Розрахунок починається з ініціалізації процесу виміру, тобто підготовки до введення нових даних. На вхід подається значення струмів, отримані з датчиків 19-21, Іф19, Іф20, Іф21.· Далі розраховується середнє значення фазного струму Іср за формулою (1), з яким спочатку порівнюється значення струму з датчика 19 Іф19. Перевіряється виконання умови співпадання значень струму з датчика 19 та середнього струму Іср = Іф19, якщо умова виконується, то значення струму Іф19 подається на перевірку умови відповідності між середнім значенням струму та іншими струмами з датчиків 20-21. Якщо умова не виконується тоді перевіряється чи більший середній струм за струм з датчика 19 Іср > Іф19, якщо ця умова виконується, то напруга на відповідній обмотці підвищується, а якщо не виконується, то напруга понижується до того рівня поки не виконається умова Іср = Іф19. Отримане значення напруги подається на драйвери управління інверторами. Регулювання струмів Іф20, Іф21 здійснюється за таким же алгоритмом. Регулювання сигналів, що подаються на драйвери управління 10-12 однофазними інверторами 16-18 здійснюється за таким же алгоритмом. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 1. Пристрій для компенсації параметричної несиметрії в дводвигунному тяговому асинхронному електроприводі, що одержує живлення від двох джерел напруги різного рівня, містить два асинхронних електродвигуни й перетворювачі, які складаються з однофазних інверторних IGB транзисторних мостів, до вихідних фаз яких приєднані відповідні обмотки двигунів електрично не зв'язані між собою, що утворюють в кожному двигуні схему "розімкнутий трикутник", який відрізняється тим, що в систему управління введені датчики струму, мікропроцесорний блок корекції несиметрії та драйвери управління автономними інверторами напруги. 2. Пристрій за п. 1, який відрізняється тим, що входи датчиків струму з'єднані послідовно з обмотками двигунів, виходи датчиків з'єднані з входами аналого-цифрового перетворювача, вихід якого з'єднаний з входом мікропроцесорного блока корекції несиметрії, вихід якого з'єднано з входом цифро-аналогового перетворювача, виходи якого з'єднані з керуючими входами драйверів управління, виходи яких з'єднані з керуючими входами автономних інверторів напруги. 3 UA 75120 U 4 UA 75120 U 5 UA 75120 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for compensation of parametric unsymmetry of double-motor traction asynchronous drive
Автори англійськоюShokariov Dmytro Anatoliiovych, Ivaschenko Viktoria Vitaliivna, Bialobrezhskyi Oleksii Volodymyrovych, Serhiienko Serhii Anatoliiovych
Назва патенту російськоюУстройство для компенсации параметрической несимметрии в двухдвигательном тяговом асинхронном электроприводе
Автори російськоюШокарев Дмитрий Анатольевич, Иващенко Виктория Витальевна, Бялобржеский Алексей Владимирович, Сергиенко Сергей Анатольевич
МПК / Мітки
МПК: H02M 7/00, H02K 17/00
Мітки: несиметрії, тяговому, параметричної, пристрій, асинхронному, компенсації, дводвигунному, електроприводі
Код посилання
<a href="https://ua.patents.su/8-75120-pristrijj-dlya-kompensaci-parametrichno-nesimetri-v-dvodvigunnomu-tyagovomu-asinkhronnomu-elektroprivodi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для компенсації параметричної несиметрії в дводвигунному тяговому асинхронному електроприводі</a>
Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються
Номер патенту: 30471
Опубліковано: 25.02.2008
Автори: Волков Олександр Васильович, Косенко Ігор Олександрович
МПК: H02P 7/00, H02P 21/00
Мітки: спосіб, тиристорах, замикаються, асинхронному, векторного, автономним, регулювання, електроприводі, трифазним, інвертором, струму
Формула / Реферат:
1. Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, який полягає у тому, що задають необхідні значення намагнічувальної і активної проекцій узагальненого вектора статорного струму двигуна відповідно на осі абсцис і ординат ортогональної координатної системи, що обертається, яка орієнтована віссю абсцис за узагальненим вектором потокозчеплення ротора...
Пристрій захисту від пофазної несиметрії струмів конденсаторної батареї

Номер патенту: 14741
Опубліковано: 04.02.1997
Автори: Журахівський Анатолій Валентинович, Кенс Юрій Амброзієвич
МПК: H02H 7/00
Мітки: пофазної, захисту, струмів, несиметрії, конденсаторної, пристрій, батареї
Формула / Реферат:
Пристрій захисту від пофазної несиметрії струмів конденсаторної батареї, що містить первинні давачі струмів конденсаторної батареї, амплітудний селектор і пороговий елемент, який відрізняється тим, що він додатково містить формувачі модулів різниць струмів або напруг, до входів яких під'єднані виходи по меншій мірі двох давачів (трансформаторів) струмів, перші виходи формувачів з'єднані в зірку, а другі виходи їх та нуль зірки з'єднані зі...
Пристрій для компенсації реактивної потужності трифазного навантаження
Номер патенту: 94181
Опубліковано: 11.04.2011
Автори: Никитенко Максим Васильович, Бурбело Михайло Йосипович
МПК: H02J 3/00
Мітки: трифазного, потужності, компенсації, реактивної, навантаження, пристрій
Формула / Реферат:
Пристрій для компенсації реактивної потужності трифазного навантаження, що складається з компенсатора, який містить приєднані до мережі паралельно трифазному навантаженню трифазні силові фільтри, кожен з яких виконаний з послідовно з'єднаних конденсаторів і фільтрових реакторів, ввімкнених в зірку, та тиристорно-реакторну групу, яка складається з послідовно з'єднаних компенсуючих реакторів та зустрічно-паралельно ввімкнених тиристорів,...
Пристрій компенсації завад при підсиленні і відновленні цифрових сигналів
Номер патенту: 24506
Опубліковано: 10.07.2007
Автори: Макаренко Олександр Сергійович, Третьяков Василь Олександрович, Тертичний Григорій Миколайович
МПК: H04J 13/00, H04B 1/10, H04L 5/00
Мітки: відновленні, компенсації, пристрій, підсиленні, цифрових, завад, сигналів
Формула / Реферат:
Пристрій компенсації завад при підсиленні і відновленні цифрових сигналів, що містить основний і компенсаційний канали, який відрізняється тим, що в нього введені електронні ключі К1 і К2, диференціатор, інтегратор зі скиданням, інвертор, двобічний підсилювач-обмежувач, тригери, схема керування, при цьому вхід пристрою з'єднаний з входом ключа К1 і входом диференціатора, вихід ключа К1 з'єднаний з першим входом суматора, вихід диференціатора...
Пристрій для дослідження енергетичних показників в системі керований перетворювач-електрична мережа
Номер патенту: 71163
Опубліковано: 10.07.2012
Автори: Бялобржеський Олексій Володимирович, Давидов Олександр Юрійович, Карлик Євгеній Павлович
МПК: H02J 11/00
Мітки: енергетичних, перетворювач-електрична, керований, мережа, показників, дослідження, пристрій, системі
Формула / Реферат:
1. Пристрій для дослідження енергетичних показників в системі керований перетворювач-електрична мережа, який складається з датчиків струму та напруги, які вимірюють миттєві значення струму та напруги в аналоговому вигляді, аналогово-цифрового перетворювача, який з'єднаний з цифровими входами обчислювального пристрою і перетворює миттєві значення струму та напруги в цифровий код, блоків визначення амплітуди та фази гармонік, субблоків...
Попередній патент: Спосіб моделювання гострого запалення нирок та паранефрію
Наступний патент: Пристрій для перетворення кінетичної енергії теплих повітряних потоків в електричну енергію
Випадковий патент: Рідка формувальна смола зі слюдою, що не набухає