Спосіб та пристрій для виготовлення голкопробивної волокнистої конструкції


Формула / Реферат
1. Спосіб виготовлення голкопробивної волокнистої конструкції, що передбачає накладання один на одного волокнистих шарів на плиті, пробивання шарів у міру їх накладання за допомогою голок, що приводяться у зворотно-поступальний рух у напрямку, поперечному до шарів, і зміну відстані, що відокремлює плиту від положення голок наприкінці їх ходу, в процесі накладання шарів для одержання бажаного розподілу характеристик голкопробивання по товщині волокнистої конструкції, який відрізняється тим, що вимірюють миттєве зусилля (f), що прикладають в ході голкопробивання, вимірюють значення величини зусилля голкопробивання (F), або значення величини енергії проколювання (Е), що визначають шляхом інтегрування миттєвого зусилля проколювання за проміжок часу, та перевіряють, чи задовольняє визначене значення величини (F або Е) принаймні одну попередньо встановлену умову.
2. Спосіб за п. 1, який відрізняється тим, що величину (F) енергії проколювання визначають шляхом інтегрування виміряного миттєвого зусилля (f).
3. Спосіб за п. 2, який відрізняється тим, що інтегрування здійснюють за проміжок часу, що починається із входження голок у волокнисту конструкцію та закінчується, коли голки досягають нижньої “мертвої точки” їх ходу.
4. Спосіб за п. 1, який відрізняється тим, що визначена величина (F) зусилля голкопробивання є максимальним виміряним значенням миттєвого зусилля (f).
5. Спосіб за будь-яким з пп. 1-4, який відрізняється тим, що здійснюють перевірку по суті постійності одержаної величини.
6. Спосіб за будь-яким з пп. 1-4, який відрізняється тим, що здійснюють перевірку по суті відповідності встановленій залежності одержаної величини.
7. Спосіб за будь-яким з пп. 1-6, який відрізняється тим, що змінюють відстань між плитою і положенням, що відповідає кінцю ходу голок, залежно від визначеного значення величини (F; Е).
8. Спосіб за п. 7, який відрізняється тим, що при голкопробиванні змінюють відстань між плитою і положенням, що відповідає кінцю ходу голок, і виконують додаткову корекцію вказаної відстані, якщо визначена величина (F; Е) не задовольняє встановлену умову.
9. Спосіб за будь-яким з пп. 1-8, який відрізняється тим, що миттєве зусилля (f) вимірюють на рівні плити.
10. Голкопробивний пристрій, що містить плиту (100; 200), на яку накладені один на одний волокнисті шари, множину голок, установлених у тримачі над плитою, засоби переміщення тримача голок для приведення голок у зворотно-поступальний рух у напрямку, поперечному до шарів, і засоби (106; 206) для зміни відстані між плитою і положенням, що відповідає кінцю ходу голок, який відрізняється тим, що містить щонайменше один датчик (108; 208) зусилля, виконаний як датчик миттєвого зусилля (f), що прикладається голками при пробиванні волокнистих шарів, накладених один на одного на плиті.
11. Пристрій за п. 10, який відрізняється тим, що містить засоби (109) для визначення максимальної величини (F) миттєвого зусилля (f) при голкопробиванні.
12. Пристрій за п. 10, який відрізняється тим, що містить засоби (109) для визначення величини енергії проколювання шляхом інтегрування виміряного миттєвого зусилля (f).
13. Пристрій за будь-яким з пп. 10-12, який відрізняється тим, що принаймні один датчик (108) зусилля вмонтований між плитою (100) й опорною конструкцією.
14. Пристрій за будь-яким з пп. 10-13, який відрізняється тим, що плита (200) одним своїм краєм прикріплена до опори за допомогою шарніра (203) і обперта на принаймні один датчик (208) зусилля в місці, близькому до протилежного краю, віддаленого від указаного шарніра.
15. Пристрій за будь-яким з пп. 10-14, який відрізняється тим, що містить засоби детектування проходу голками щонайменше одного положення, що відповідає кінцю їх ходу.
16. Пристрій за будь-яким з пп. 10-15, який відрізняється тим, що містить засоби вимірювання положення верхньої поверхні волокнистих шарів, накладених один на одного на плиті.
Текст
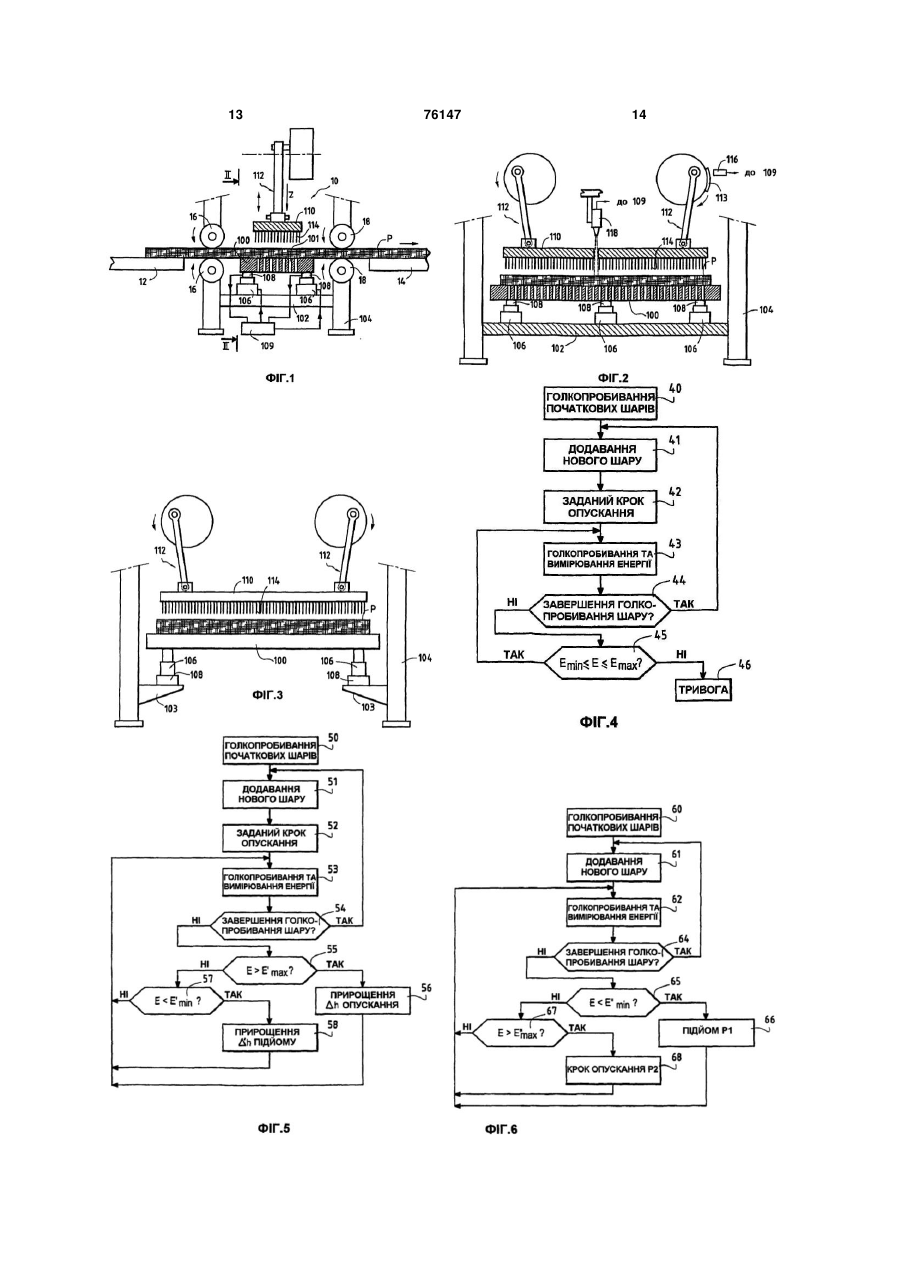
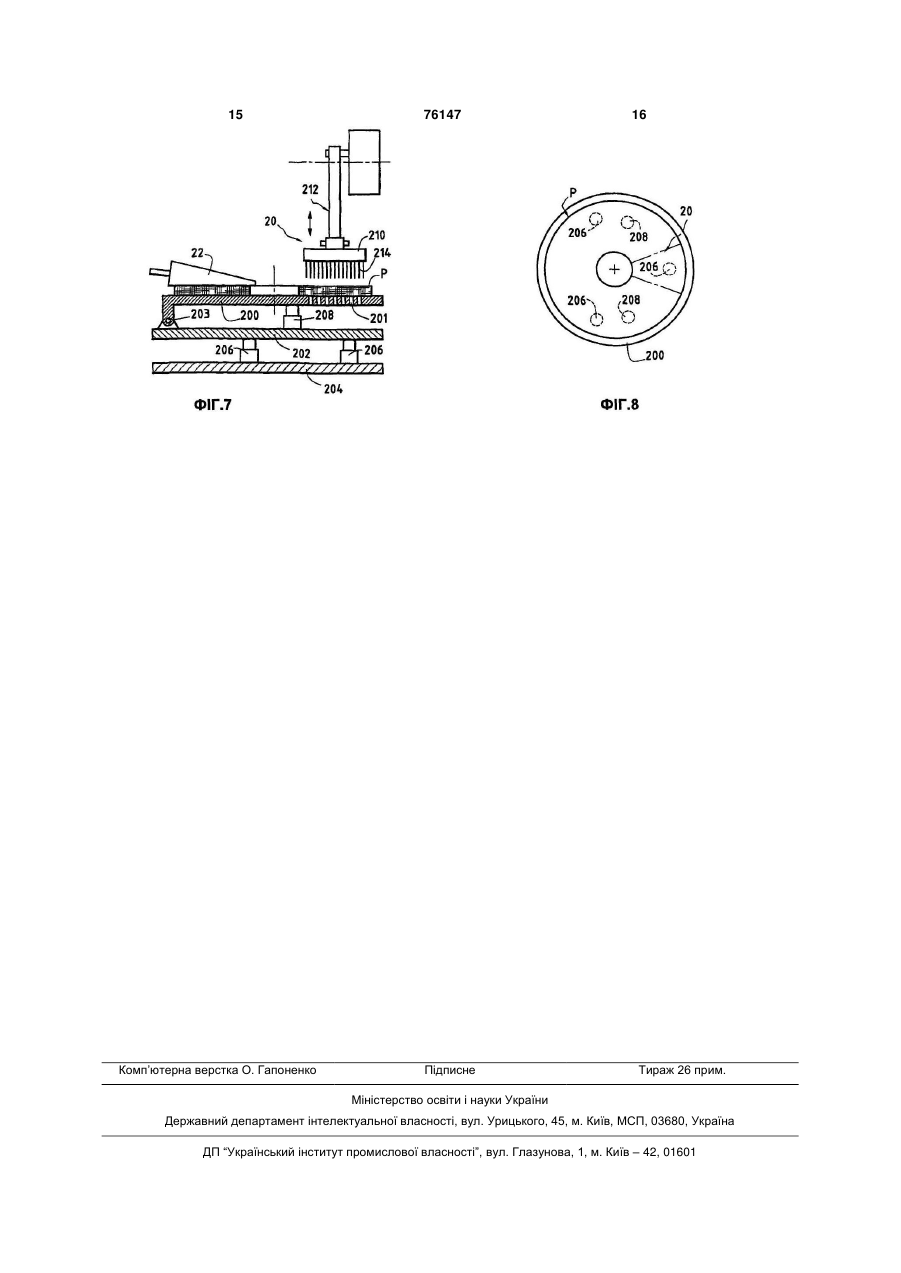
1. Спосіб виготовлення голкопробивної волокнистої конструкції, що передбачає накладання один на одного волокнистих шарів на плиті, пробивання шарів у міру їх накладання за допомогою голок, що приводяться у зворотно-поступальний рух у напрямку, поперечному до шарів, і зміну відстані, що відокремлює плиту від положення голок наприкінці їх ходу, в процесі накладання шарів для одержання бажаного розподілу характеристик голкопробивання по товщині волокнистої конструкції, який відрізняється тим, що вимірюють миттєве зусилля (f), що прикладають в ході голкопробивання, вимірюють значення величини зусилля голкопробивання (F), або значення величини енергії проколювання (Е), що визначають шляхом інтегрування миттєвого зусилля проколювання за проміжок часу, та перевіряють, чи задовольняє визначене значення величини (F або Е) принаймні одну попередньо встановлену умову. 2. Спосіб за п. 1, який відрізняється тим, що величину (F) енергії проколювання визначають шляхом інтегрування виміряного миттєвого зусилля (f). 3. Спосіб за п. 2, який відрізняється тим, що інтегрування здійснюють за проміжок часу, що починається із входження голок у волокнисту конструкцію та закінчується, коли голки досягають нижньої “мертвої точки” їх ходу. 4. Спосіб за п. 1, який відрізняється тим, що визначена величина (F) зусилля голкопробивання є максимальним виміряним значенням миттєвого зусилля (f). 2 (19) 1 3 76147 4 і обперта на принаймні один датчик (208) зусилля проходу голками щонайменше одного положення, в місці, близькому до протилежного краю, віддащо відповідає кінцю їх ходу. 16. Пристрій за будь-яким з пп. 10-15, який відрізленого від указаного шарніра. 15. Пристрій за будь-яким з пп. 10-14, який відрізняється тим, що містить засоби вимірювання поняється тим, що містить засоби детектування ложення верхньої поверхні волокнистих шарів, накладених один на одного на плиті. Даний винахід відноситься до обробки голками (голкопробивання) волокнистих конструкцій для виготовлення каркасів, призначених для формування армованих структур виробів з композитних матеріалів, як-от, наприклад, каркаси гальмівних дисків з термоконструкційного композитного матеріалу. Для виготовлення подібних голкопробивних конструкцій відомий спосіб укладання на опору або стіл послідовних волокнистих шарів і пробивання (проколювання) шарів у міру їхнього накладання один на одного за допомогою голок, які приводяться у зворотно-поступальний рух у напрямку, поперечному у відношенні до шарів (тобто в напрямку Z). Голки піднімають волокна в шарах і переносять їх у напрямку Z. Перенесені в напрямку Ζ волокна надають голкопробивній конструкції зв'язності та стійкості до розшарування (відокремлення шарів). Шляхом включення таких конструкцій у якості армувальних каркасів у вироби з композитних матеріалів можна також надавати їм механічної міцності, яка дозволяє їм чинити опір зусиллям зсуву, як це має місце в гальмівних дисках під час прикладення гальмівного моменту. Для надання голкопробивним волокнистим конструкціям бажаних характеристик за допомогою голкопробивання відомий спосіб регулювання відстані між опорою і кінцевою точкою робочого ходу голок у міру збільшення накладання шарів один на одного. Так, зокрема, в патенті США №4790052 запропоновано збільшувати цю відстань при накладанні кожного нового шару шляхом надання опорі кроку опускання, рівного товщині обробленого голками шару. Метою цього рішення є досягнення рівномірної щільності голкопробивання по всій товщині волокнистої конструкції. У європейському патенті ЕР 0736115 запропоноване рішення, відповідно до якого передбачається враховувати зміну параметрів волокнистої конструкції в міру її формування за рахунок регулювання змінного кроку опускання опори таким чином, що крок зменшується відповідно до попередньо визначеної залежності. Метою рішення є одержання постійної товщини різноманітних накладених шарів після їхнього голкопробивання. У європейському патенті ЕР 0695823 запропоновано переносити волокна в напрямку Ζ з керуванням глибиною пробивання (проколювання) в процесі голкопробивання. Для цього в процесі голкопробивання визначають величину, що представляє положення вільної поверхні волокнистої конструкції, використовуючи датчики, які вимірюють положення вільної поверхні за межами зони голкопробивання. Порівняно до процесу, в якому крок опускання попередньо визначений, вимірювання положення поверхні в режимі реального часу дозволяє враховувати випадкові відхилення порівняно до моделі, - наприклад, з відхилення товщини окремих шарів. Проте в рішенні за документом ЕР0695823 це вимірювання не виконується точно на рівні голкопробивання. Крім того, не враховуються інші можливі відхилення від попередньо встановлених умов, як-от, наприклад, знос голок. Задача, на вирішення якої спрямовано даний винахід, полягає у створенні способу голкопробивання, який дозволяє враховувати дійсну ефективність роботи голок протягом усього процесу голкопробивання таким чином, щоб забезпечити можливість контролю або керування процесом у режимі реального часу. Відповідно до винаходу рішення поставленої задачі досягається за рахунок способу виготовлення голкопробивної волокнистої конструкції, що передбачає накладання один на одного волокнистих шарів на плиті, пробивання шарів у міру їхнього накладання за допомогою голок, що їх приводять у зворотно-поступальний рух у напрямку, поперечному до прошарків, і зміну відстані, що відокремлює плиту від голок у положенні, що відповідає кінцю їхнього ходу, в процесі накладання шарів для одержання бажаного розподілу характеристик голкопробивання по товщині волокнистої конструкції. При цьому відповідно до способу за даним винаходом вимірюють миттєве зусилля, що прикладається в ході голкопробивання (миттєве зусилля (f) голкопробивання), за виміряним миттєвим зусиллям знаходять значення величини, що представляє зусилля (F) голкопробивання або енергію (Е) проколювання, і виконують перевірку того, чи значення величини (F; Е) задовольняє, щонайменше, одній попередньо визначеній умові. Енергія (Е) проколювання голок може бути вирахувана шляхом інтегрування величини виміряного миттєвого зусилля (f) голкопробивання, наприклад, на проміжку часу, що відмежовує входження голок у волокнисту конструкцію від досягнення голками нижньої мертвої точки їхнього ходу. Знайдена величина може бути також максимально виміряною величиною (F) миттєвого зусилля (f), виміряного під час проникнення голок у волокнисту конструкцію. Відповідно до бажаного розподілу характеристик голкопробивання по товщині волокнистої конструкції виконують перевірку того, чи величина, яка представляє зусилля (F) голкопробивання або енергію (Е) проколювання, залишається по суті постійною, чи змінюється по суті відповідно до 5 76147 6 заданої залежності. Фіг.4-6 ілюструють послідовні етапи трьох приВідповідно до одного аспекту винаходу вимікладів здійснення способу за винаходом, рювання зусилля (F) голкопробивання або енергії Фіг.7 схематично зображує голкопробивний (Е) проколювання являє собою засіб контролю пристрій кругової дії, якісного перебігу процесу голкопробивання, який Фіг.8 зображує на вигляді зверху опорну плиту управляється відповідно до попередньо визначеголкопробивного пристрою за Фіг.7. ного методу, - наприклад, з постійним кроком опуЗдійснення винаходу скання плити або зі спеціальною зміною кроку опуНа Фіг.1 і 2 схематично поданий голкопробивскання, як це описано у європейському патенті ЕР ний пристрій (голкопробивна машина) з прямолі0736115. нійною подачею матеріалу. Машина відомим чиВідповідно до іншого аспекту винаходу управном містить голкопробивний апарат 10, ляють зміною відстані між плитою і положенням, розташований між першим столом 12 і другим що відповідає кінцю ходу голок, залежно від знайстолом 14. деного значення зусилля (F) голкопробивання або Системи приводу з привідними подавальними енергії (Е) проколювання. роликами 16, 18 (відомими також за назвою вхідЗокрема, коли змінюють заданим чином відсних і вихідних притискних роликів) установлені між тань між плитою й положенням, що відповідає кінстолом 12 і голкопробивним апаратом 10 та між цю ходу голок у ході процесу голкопробивання, в цим апаратом і столом 14. необхідному разі здійснюють додаткову модифікаВолокнистий настил Ρ переміщується зворотцію згаданої відстані, якщо знайдена величина (Е) но-поступально між столами 12 і 14 з проходом або (F) не задовольняє заданій умові. через голкопробивний апарат 10. Настил Ρ форУ двох останніх випадках зміна відстані управмується з волокнистих шарів, що накладаються ляється таким чином, щоб домогтися відповідності один на одного й обробляються голками в міру зусилля голкопробивання або енергії проколюванїхнього накладання. Шари можуть бути утворені ня заданій величині або попередньо визначеній тканими полотнищами, полотнами з одним або залежності зміни відповідно до бажаного розподідекількома напрямками волокон, трикотажем, повлу характеристик голкопробивання по товщині стю або іншими волокнистими структурами, переволокнистої конструкції, як-от із відсотковим вмісважно двомірними. Після кожного проходу голкоптом волокон, перенесених у напрямку Z. робивання, коли настил Ρ повністю пройшов через В одному і другому аспектах винаходу вимірюголкопробивний апарат 10 і розташувався на одвання переданого зусилля або енергії, що витраному зі столів 12 і 14, додають новий шар і здійсчається при проколюванні голками, дозволяє вранюють новий прохід голкопробивання, переміщуюховувати справжню ефективність голок, чи настил в іншому напрямку. включаючи всі можливі коливання, - наприклад, В голкопробивному апараті 10 настил Ρ проіндивідуальну товщину нестандартного шару або ходить по опорній плиті 100, над якою розташовапередчасний знос голок. на голкова плита 110. Миттєве зусилля f голкопробивання переважОпорна плита 100 спирається на балки 102 но вимірюють на рівні опорної плити. рами 104 за допомогою домкратів або силових Задачею, що її вирішує винахід, є також ствоциліндрів 106 (кількість яких може дорівнювати, рення голкопробивного пристрою, що дозволяє наприклад, шести), що дозволяють змінювати верздійснити описаний вище спосіб. тикальне положення опорної плити 100. Вирішення поставленої задачі досягається за Голкова плита ПО (тобто тримач голок) розрахунок пристрою, що містить плиту, на якій моташована поперечно до напрямку переміщення жуть бути накладені один на одного волокнисті настилу Р, щонайменше, по всій його ширині. Голшари, множину голок, установлених у тримачі над кова плита 110 приводиться у вертикальний звоплитою, засоби переміщення тримача голок для ротно-поступальний рух за допомогою відповідних приведення голок у зворотно-поступальний рух у засобів у вигляді одного або декількох привідних напрямку, поперечному до прошарків, і засоби для пристроїв 112 на кшталт кривошипно-шатунних зміни відстані між плитою і положенням, що відпомеханізмів. У показаному прикладі виконання певідає кінцю ходу голок. У пристрої за винаходом редбачені два кривошипно-шатунних механізми, передбачений принаймні один датчик зусилля, сполучених з голковою плитою поблизу її кінців. виконаний з можливістю вироблення сигналу, який Один або декілька двигунів (не показані), встановпредставляє миттєве зусилля, що прикладається лених, наприклад, на рамі 104, служать приводом голками при пробиванні волокнистих шарів, накривошипно-шатунних механізмів 112. кладених один на одного на плиті. Голки 114, установлені на голковій плиті 110, Винахід стане зрозумілішим при вивченні його постачені зазублинами, гачками або скобами. Водокладного опису, що не вносить жодних обмени проникають у волокнисту структуру накладених жень і містить посилання на додані креслення. На один на одного шарів настилу Ρ для захоплення кресленнях: волокон, які переміщуються поперечно до шарів Фіг.1 схематично зображує голкопробивний (напрямок Ζ) і зв'язують шари між собою. пристрій з прямолінійною подачею, Прохід голкопробивання здійснюється після Фіг.2 схематично зображує голкопробивний додавання нового волокнистого шару шляхом попристрій за фіг. 1 у розтині по лінії ІІ-ІІ, дачі настилу Ρ за допомогою подавальних роликів Фіг.3 схематично зображує голкопробивний 16, 18, так що вся поверхня настилу повністю обпристрій з прямолінійною подачею в другому варіробляється голками. Подача настилу може бути анті виконання, рівномірною або нерівномірною. В останньому 7 76147 8 випадку під час проколювання голками здійснюабо оптичного типу, що взаємодіє, наприклад, із ється зупинка або уповільнення настилу. сегментом 113 кулачкового профілю, який займає Керування силовими циліндрами 106 для пепевне кутове положення при проходженні верхньої реміщення опорної плити 100 здійснюється таким мертвої точки і приводиться в обертання разом із чином, що відстань між опорною плитою 100 і кінкривошипом одного з привідних пристроїв 112 голцевою точкою ходу голок 114 може бути змінена. кової плити. Сигнал датчика 116 приймається й Глибина проникання голок 114 у настил Ρ відобробляється системою 109. повідає декільком товщинам шарів. У опорній плиУ іншому варіанті здійснення визначають веті 100 виконані отвори 101, розташовані навпроти личину Е, що представляє енергію проколювання, голок 114, так що голки можуть входити в ці отвояка може корелювати з кількістю волокон, перенери при пробиванні перших шарів. сених у напрямку Z. Цю величину Ε одержують Пристрої описаного типу добре відомі самі по шляхом інтегрування за часом за допомогою сиссобі. Зокрема, можна згадати посилання на патент теми 109 миттєвих значень зусилля f голкопробиСША №4790052, уже вказаний вище. вання. Відповідно до винаходу один або декілька даЦе інтегрування величини f здійснюється в тчиків зусилля розташовані таким чином, щоб помежах заданого проміжку часу, наприклад, періоду давати сигнал, який представляє зусилля, що причасу від проходу голками верхньої мертвої точки кладається голками при пробиванні настилу Р. до проходу нижньої мертвої точки при виконанні Хоча вимірювання цих зусиль може здійснюробочого ходу. ватися на рівні голкової плити, воно виконується Детектування проходу нижньої мертвої точки на рівні опорної плити 100 з міркувань зручності і може здійснюватися таким самим чином, як і видля того, щоб на вимірювання не впливали присзначення проходу верхньої мертвої точки. корення і вібрація, яким піддається голкова плиМожна починати інтегрування величини f не з та. моменту проходу голками верхньої мертвої точки, У прикладі виконання за Фіг.1 і 2 датчики 108 а з моменту входження голок у волокнистий назусилля вмонтовані між штоками силових циліндстил. Для детектування цього моменту можна вирів 106 і опорною плитою 100. Датчики 108 можуть мірювати миттєве положення верхньої поверхні бути відомими датчиками напруги (тензодатчикаволокнистого настилу. Справді, з огляду на те, що ми), наприклад, п'єзоелектричного типу, з'єднаницикл між двома послідовними проходами голками ми за мостовою схемою. Електричні сигнали датверхньої мертвої точки відомий завдяки детектучиків 108 приймаються системою 109 (Фіг.1). ванню цих проходів, а хід голок є відомою постійСистема 109 є системою керування, яка, зокрема, ною величиною, знання положення верхньої повеподає керуючі сигнали привідним пристроям 16, 18 рхні волокнистого настилу між верхньою і нижньою і силовим циліндрам 106. мертвими точками дозволяє визначити, в який Сигнали, вироблювані датчиками 108, предмомент циклу голки входять у волокнистий настил. ставляють миттєві зусилля голкопробивання (проПоложення верхньої поверхні волокнистого колювання). Сигнали, одержувані від різноманітнастилу може бути визначене механічними засоних датчиків, можуть підсумовуватися або бами у вигляді щупів, як це описано у згаданому усереднюватися для одержання середнього сигвище документі ЕР 0695823. налу f', що дозволяє вивести величину f, що предМоже бути бажаним використання також оптиставляє миттєве зусилля голкопробивання. чних безконтактних засобів вимірювання, як-от Коли голки перебувають за межами настилу Р, лазерний випромінювач/приймач 118, як це описадатчиками може вироблятися середній сигнал f'0, но в патентній заявці Франції №0102869 заявника відмінний від нульового через залишкові зусилля, даного винаходу. Випромінювач, який займає фікякі діють на настил, наприклад, унаслідок тертя соване положення щодо рами 104, спрямовує ламіж настилом і очисником, що впливає на нього зерний пучок до поверхні волокнистого настилу. (не показаний). Зусилля f'0 вимірюється, наприЛазерний пучок, переважно не колімований, відклад, у момент проходу мертвої точки або відповібивається, й аналіз траєкторії пучка між випромідає залишковим зусиллям (навмисним або ненавнювачем і приймачем дозволяє одержати бажані мисним) унаслідок тертя на очиснику. Таким дані про положення настилу. Випромінючином, строго говорячи, величина f, що представвач/приймач, зв'язаний із системою 109, може буляє миттєве зусилля голкопробивання, дорівти розміщений на рівні голкопробивного апарата, нює f'-f'0. при цьому лазерний пучок проходить через отвір, Величина F, що представляє зусилля голкопвиконаний у голковій плиті 110. робивання в ході кожного циклу пробивання, може Приклад виконання за Фіг.3 відрізняється від бути визначена, як максимальне миттєве зусилля f приклада за Фіг.2 тим, що опорна плита 100 голкоголкопробивання, виміряне під час цього циклу пробивного апарата спирається на уступи 103 копробивання. лон рами 104 за допомогою силових циліндрів Для цього системою 109 здійснюється зняття 106. У даному прикладі виконання використовувідліків величини f, і відлік, що відповідає максиються чотири силових циліндри 106. мальному значенню, отриманому під час кожного Датчики 108 зусиль умонтовані між уступами ходу голок, приймається як значення F. Початок 103 й корпусами силових циліндрів 106. Таке розкожного циклу пробивання може бути зафіксоваміщення датчиків може використовуватися також у ний при проході голками верхньої мертвої точки прикладі виконання за Фіг.1 і 2. їхнього робочого ходу. Ця точка детектується за Порівняно до машини за Фіг.1 і 2, машина за допомогою датчика 116, наприклад індуктивного Фіг.3 може використовуватися для голкопробиван 9 76147 10 ня вужчих настилів Р. жане інтенсивніше перенесення волокон у напряДалі буде описаний процес голкопробивання мку Ζ для підвищення стійкості до розшарування. відповідно до одного приклада здійснення способу За рахунок безперервного вимірювання енергії з посиланням на Фіг.4. проколювання спосіб за Фіг.4 дозволяє здійснюваПісля голкопробивання декількох початкових ти перевірку того, чи відповідає справжня ефектинакладених один на одного шарів (етап 40) додавність голкопробивання бажаній. ють новий шар (етап 41) й опорній плиті надають Інший приклад здійснення винаходу поданий крок опускання (етап 42). на Фіг.5. Цей варіант способу за винаходом пеКрок опускання є попередньо визначеною (заредбачає етапи 50-53 голкопробивання початкоданою) величиною. Під час процесу голкопробивих шарів, додавання нового шару і виконання вання крок опускання, що надається опорній плиті попередньо визначеного кроку опускання, а також після кожного проходу голкопробивання шару й голкопробивання з вимірюванням енергії проколюнакладання нового шару, може бути постійним або вання аналогічно до етапів 40-43 способу за Фіг.4. він може змінюватися заданим чином, як це опиЗнайдене значення енергії Ε порівнюють із попесано у згаданих патентних документах US 4790052 редньо визначеними мінімальною і максимальною і ЕР 0736115. величинами Е'min і Е'mах доти, поки не закінчений Під час голкопробивання нового накладеного прохід голкопробивання (етап 54 перевірки). шару зусилля F голкопробивання, що виникає при Якщо знайдене значення енергії Ε перевищує вході голок у волокнисту конструкцію, або енергія граничну величину Е'mах (етап 55 перевірки), опорΕ проколювання визначаються датчиками 106 і ній плиті 100 надається прирощення h опускання системою 109 (етап 43). (етап 56). Це може бути здійснене під час голкопЗнайдене значення зусилля F або енергії Ε робивання останнього накладеного шару при деможе відповідати значенню, визначеному при кожтектуванні перевищення або після закінчення проному проколюванні голками, або може бути знайбивання шару, при цьому прирощення h дене середнє значення результатів вимірювань накладають на попередньо визначений крок опусзусилля за декілька послідовних циклів прониккання. Після виконання етапу 55 повертаються до нення. етапу 53. Якщо перевірка на етапі 54 показує, що У нижченаведеному описі різноманітних прикпрохід голкопробивання завершено, повертаються ладів здійснення способу голкопробивання переддо етапу 51 додавання нового шару. бачається, що здійснюється вирахування енергії Ε Коли перевірка на етапі 55 дає негативний репроколювання, з якою може бути співвіднесена зультат, знайдене значення енергії Ε порівнюють кількість волокон, перенесених у напрямку Ζ. Анаіз граничною величиною Е'min. Якщо знайдене зналогічним чином при здійсненні цих варіантів спочення енергії Ε менше за граничну величину Е'min собу може вимірюватися зусилля голкопробиван(етап 57 перевірки), опорній плиті 100 надається ня, що характеризує справжню ефективність прирощення 'h підйому, яке може бути, наприголок. клад, протилежне до прирощення h опускання У прикладі здійснення за Фіг.4, якщо робочий (етап 58). Це прирощення може накладатися на прохід голкопробивання не завершений (етап 44 попередньо визначений крок опускання негайно перевірки), знайдене значення енергії Ε проколюабо після закінчення проходу голкопробивання. вання порівнюють із мінімальною граничною велиПісля етапу 58 переходять до етапу 53. чиною Еmin і максимальною граничною величиною Граничні величини Е'min і Е'mах можуть визначаЕmах. Якщо значення Ε лежить в інтервалі [Еmin, тися експериментальним шляхом і необов'язково Еmах] (етап 45 перевірки), повертаються до етапу дорівнюють величинам, використовуваним при 43. Якщо прохід голкопробивання закінчений на виконанні способу за Фіг.4. Вони можуть бути фікетапі 44 перевірки (це може бути визначено датчисованими або змінюватися попередньо певним ком завершення проходу настилу Р), повертаютьчином в ході формування оброблюваного голками ся до етапу 41. настилу. Якщо перевірка на етапі 45 дає негативну відПрирощення h і 'h становлять, наприклад, повідь, генерується сигнал тривоги (етап 46), який від одного до декількох відсотків середнього кроку означає, що зусилля голкопробивання (і, отже, опускання. ефективність голок) перебуває за межами припусВарто зауважити, що прирощення h і 'h мотимого інтервалу. Це може відбуватися, наприжуть бути змінними, наприклад, залежно від ампклад, при зносі або поломці голок, при помилці в літуди переходу граничних величин Е'min і Е'mах. позиціюванні столу або при неналежному русі обЗавдяки безперервному вимірюванню зусилля роблюваного голками виробу або шарів, що утвоголкопробивання спосіб за Фіг.5 дозволяє коректурюють настил Р. вати в необхідному випадку задане значення кроку Величини Еmin і Еmах визначають експерименопускання або задану залежність зміни кроку опустальним шляхом, наприклад, залежно від бажаних кання, так що ефективність голок залишається характеристик голкопробивання, зокрема, від павідповідною очікуваному рівню. раметрів переносу волокон у напрямку Z. ВеличиНа Фіг.6 показані етапи способу голкопробини Еmin і Еmах можуть бути фіксованими або змінвання, відповідно до якого опускання опорної плиними в міру формування настилу Ρ відповідно до ти управляється тільки залежно від знайденого попередньо визначеної залежності зміни кроку. значення енергії голкопробивання. Так, наприклад, енергія голкопробивання, а знаПісля голкопробивання початкових шарів (етап чить і ступінь переносу волокон у напрямку Ζ, мо60) додають новий шар (етап 61), запускають прожуть бути вищими в тих частинах настилу, де бацес голкопробивання і визначають енергію Ε про 11 76147 12 колювання голок (етап 62), як на етапі 43 способу композитного матеріалу. за Фіг.4. До закінчення проходу голкопробивання Диск Р приводиться в обертання і проходить знайдене значення енергії Ε порівнюють (етап 64 через голкопробивний апарат, що містить голкову перевірки) з мінімальною і максимальною граничплиту 210, що перекриває зверху сектор опорної ними величинами Е''min і Е''mах. Якщо знайдене знаплити 200 (його розташування показане штрихпунчення енергії Ε менше за граничну величину Е''min ктирними лініями на Фіг.8). Голкова плита приво(етап 64 перевірки), подають команду на виконандиться у вертикальний зворотно-поступальний рух ня елементарного кроку Р1 підйому опорної плити за допомогою привідного пристрою 212 на кшталт (етап 66) і повертаються до етапу 62. Якщо перекривошипно-шатунного механізму. вірка на етапі 64 дає позитивний результат, поверГолки 214, встановлені на голковій плиті 210, таються до етапу 61. Якщо значення енергії Ε не постачені зазублинами, гачками або скобами для нижче за величину Е''min, його порівнюють з Е''mах захоплення волокон у накладених один на одного (етап 67 перевірки). Якщо значення енергії Ε пешарах та їхнього переносу в поперечному до шаревищує Е''mах, подають команду на виконання рів напрямку при пробиванні голками диска Р. елементарного кроку Р2 опускання опорної плити Приведення диска Ρ в обертання може здійс(етап 67) і повертаються до етапу 62. Якщо знанюватися за допомогою конічних роликів, як-от чення енергії Ε не перевищує Е''mах, повертаються ролики 22. Опорна плита 200 зафіксована й постадо етапу 62. чена отворами 201 навпроти голок 214. У іншому Величини Е''min і Е''mах можуть бути попередньо варіанті привід диска Ρ може здійснюватися шлявизначені експериментальним шляхом, зокрема, хом обертання опорної плити 200. В цьому останзалежно від бажаних характеристик голкопробиньому випадку опорна плита 200 постачена поквання. Вони можуть бути фіксованими або зміннириттям, у яке голки можуть входити без їх ми в міру формування волокнистого настилу відушкодження. Перенос волокон у напрямку Ζ у повідно до попередньо визначеної залежності цьому покритті з'єднує диск Ρ з опорною плитою і зміни кроку. за рахунок цього полегшує приведення його в Крок Р1 підйому і крок Р2 опускання можуть обертання. бути рівними або різними, їхня величина може Опорна плита 200 шарнірно укріплена на опорі бути фіксованою або змінюватися заданим чином, 202, яка спирається на раму 204 за допомогою наприклад, залежно від різниці між Ε и Е''min або Ε силових циліндрів 206. У поданому прикладі викои Е''mах. нання використані три силових циліндри (Фіг.8). Очевидно, що способи за Фіг.4-5 перериваОдин або декілька датчиків 208 зусилля (в поються після виконання останнього проходу голкоказаному прикладі виконання два датчики) вмонпробивання, коли настил Ρ досяг бажаної товтовані між опорою 202 й опорною плитою 200. щини. Як показано на Фіг.7, шарнір 203 кріплення Вимірювання зусилля голкопробивання може опорної плити 200 на опорі 204 розташований в бути передбачене не тільки в голкопробивній маокружній периферійній зоні опорної плити 200 діашині з прямолінійною подачею, але також і в цирметрально протилежно до голкопробивного апаракулярній машині. та 20. Датчики 208 розташовані під опорною плиНа Фіг.7 і 8 показана голкопробивна машина з тою 200 обабіч голкопробивного апарата 20 у круглою опорною плитою 200. Кільцеві шари намісцях, віддалених від шарніра 203. Таке розташукладаються один на одного й обробляються голвання шарніра 203 і датчиків 208 дозволяє оптиміками на опорній плиті 200 для формування голкозувати вимірювання зусилля голкопробивання, яке пробивного волокнистого каркаса або диска Ρ має місце на рівні голкопробивного апарату 20. кільцевої форми. Як відомо, шари можуть формуСигнали датчиків 208 приймаються системою ватися з кілець або вкладуваних у стик сегментів керування, яка управляє, зокрема, обертанням кілець, що вирізані з волокнистої структури, напридиска Ρ і силовими циліндрами для вертикального клад, з тканини, полотна з одним або декількома переміщення опорної плити в процесі голкопробинапрямками волокон або повсті. Шари можуть бування. ти також сформовані пласко навитими витками, якСигнали датчиків 208, що представляють ефеот гвинтові тканинні витки або витки з деформовактивність голок при пробиванні ними диска Р, а них джгутів, або ж витки, сформовані з двомірної також у необхідних випадках результати вимірюдеформуючої структури. Як посилання можна навань положення верхньої поверхні диска Ρ викозвати, наприклад, патентні документи US 6009605, ристовуються для контролю або керування голкоUS 5662855 і WO 98/44182. Кільцевий каркас Ρ пробиванням у режимі реального часу відповідно може, зокрема, бути каркасом гальмівного диска з до способів, описаних з посиланнями на Фіг.4 і 5. 13 76147 14 15 Комп’ютерна верстка О. Гапоненко 76147 Підписне 16 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and appliance to make needle-bonded fibrous structure
Автори англійськоюDuval RENAUD
Назва патенту російськоюСпособ и устройство для изготовления иглопробивной волокнистой конструкции
Автори російськоюДюваль Рено
МПК / Мітки
МПК: D04H 18/00
Мітки: голкопробивної, спосіб, волокнистої, конструкції, пристрій, виготовлення
Код посилання
<a href="https://ua.patents.su/8-76147-sposib-ta-pristrijj-dlya-vigotovlennya-golkoprobivno-voloknisto-konstrukci.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій для виготовлення голкопробивної волокнистої конструкції</a>
Спосіб виготовлення виробів з волокнистої маси та пристрій для його здійснення
Номер патенту: 12265
Опубліковано: 25.12.1996
Автори: Кропінов Борис Іванович, Скрильов Олександр Васильович, Калініченко Олексій Павлович, Мочульський Людвиг Вікторович
МПК: D21J 7/00
Мітки: спосіб, волокнистої, пристрій, маси, виробів, здійснення, виготовлення
Формула / Реферат:
1. Способ изготовления изделий из волокнистой массы, преимущественно массы для производства картона, включающий намывку и формовку волокна на пористую форму под вакуумом, обезвоживание изделия, его опрессовку и сушку, отличающийся тем, что, с целью повышения качества изделий, намывку и формовку волокна производят на песчаную форму, перед опрессовкой изделие покрывают тканью, а опрессовку и сушку производят одновременно через слой...
Голкопробивна машина для пророблювання голками текстильної конструкції та спосіб виготовлення текстильної конструкції
Номер патенту: 74423
Опубліковано: 15.12.2005
Автори: Жан Робер, Бодрі Іван
МПК: D04H 18/00
Мітки: голками, голкопробивна, конструкції, пророблювання, машина, спосіб, виготовлення, текстильної
Формула / Реферат:
1. Голкопробивна машина для пророблювання голками текстильної конструкції, що виготовлена з декількох накладених один на одний прошарків (12), яка містить голкопробивний стіл (10), рухливий у вертикальному напрямку, голкопробивну головку (14), що має певну кількість гачкових голок (18), розташованих вертикально над зазначеним голкопробивним столом, та привідні засоби для надання голкопробивній головці вертикального зворотно-поступального...
Спосіб виготовлення малотоксичної волокнистої плити
Номер патенту: 50985
Опубліковано: 15.11.2002
Автори: Третяк Петро Петрович, Герасименко Іван Іванович, Яковенко Валентин Петрович
МПК: B27N 3/04
Мітки: виготовлення, волокнистої, плити, малотоксичної, спосіб
Формула / Реферат:
Спосіб виготовлення малотоксичної волокнистої плити, що містить змішування рослинного волокна з карбамідоформальдегідним в’яжучим, висушування, формування килима і пресування, який відрізняється тим, що в карбамідоформальдегідну смолу в процесі приготування в’яжучого вводять водний розчин карбаміду, рідкого скла і казеїнового клею в кількості від 0,5 до 5,0 % від сухого залишку смоли, а волокно перед проклеюванням в’яжучим обробляють тим же...
Спосіб виготовлення виробів із волокнистої маси
Номер патенту: 55072
Опубліковано: 17.03.2003
Автори: Фоменко Андрій Володимирович, Кропінов Борис Іванович
МПК: D21J 7/00
Мітки: спосіб, волокнистої, виробів, маси, виготовлення
Формула / Реферат:
Спосіб виготовлення виробів з волокнистої маси, переважно з целюлозних відходів, що включає намивання і формування волокна на пористу форму під вакуумом, покривання сформованого виробу шаром тканинного матеріалу, наступне обпресовування та сушіння виробу, який відрізняється тим, що перед намиванням і формуванням волокна на пористій формі розміщують формоутворюючі елементи, а перед обпресовуванням сформований виріб додатково покривають...
Багатошаровий конденсатор тонкошарової конструкції і спосіб його виготовлення
Номер патенту: 41477
Опубліковано: 17.09.2001
Автори: Пріміг Роберт, Пітцер Дана, Верзінг Вольфрам, Хьонлайн Вольфганг, Бруххаус Райнер
Мітки: тонкошарової, виготовлення, конденсатор, спосіб, багатошаровий, конструкції
Формула / Реферат:
1. Багатошаровий конденсатор тонкошарової конструкції, на основі якого впереміж розміщені n+1 електродних шарів та п діелектричних керамічних шарів з максимальною товщиною шару 2 мкм з утворенням багатошарової структури, перший та другий контактні шари розташовані збоку багатошарової структури роздільно один від одного і перпендикулярно площинам, у яких розташовані електродні та діелектричні керамічні шари, електродні шари з'єднані впереміж...
Попередній патент: Спосіб ураження броньованої цілі зверху обертовим снарядом (ракетою)
Наступний патент: Електромеханічний вузол низу взуття
Випадковий патент: Установка для плазмової різки на водяному столі