Спосіб і пристрій для виконання корекції тонкого частотного зсуву після швидкого перетворення фур’є
Формула / Реферат
1. Спосіб корекції сигналу ОМРЧ, який включає:
- прийом сигналу ОМРЧ з одним або більше настроювальними символами, переданого на частині одного з регулярно рознесених субносіїв цього сигналу ОМРЧ;
- перетворення сигналу ОМРЧ у частотну область з використанням ШПФ;
- компенсацію пілотної фази сигналу ОМРЧ з використанням одного або більше настроювальних символів, які відповідають одному або більше настроювальним символам, використаним при генеруванні сигналу ОМРЧ;
- визначення дробового частотного зсуву сигналу ОМРЧ, базуючись на зазначених одному або більше настроювальних символах; і
- корекцію сигналу ОМРЧ згідно з значенням дробового частотного зсуву.
2. Спосіб за п. 1, який відрізняється тим, що операція визначення додатково включає операції:
- визначення наявності більш ніж одного настроювального символу;
- після виявлення більш ніж одного настроювального символу, визначення дробового частотного зсуву, що відповідає кожному настроювальному символу;
- усереднення дробових частотних зсувів, що відповідають кожному настроювальному символу, для визначення середнього дробового частотного зсуву; і
- операція корекції додатково включає корекцію сигналу ОМРЧ згідно з значенням середнього дробового частотного зсуву.
3. Спосіб за п. 1, який відрізняється тим, що додатково включає операції:
- визначення, чи є часова синхронізація недосконалою; і
- повертання фази всіх пілотів на величину, пропорційну індексу субносія, якщо була виявлена недосконалість часової синхронізації.
4. Спосіб за п. 1, який відрізняється тим, що додатково включає операції:
- визначення, чи є часова синхронізація недосконалою;
- визначення наявності більш ніж одного настроювального символу; і
- у випадку недосконалості часової синхронізації і наявності більш ніж одного настроювального символу, повертання фази всіх пілотів на величину, пропорційну індексу субносія і усереднену на зазначених більш ніж одному настроювальних символах.
5. Спосіб за п. 1, який відрізняється тим, що додатково включає операцію демодуляції частотно коригованого сигналу ОМРЧ для отримання символів даних.
6. Спосіб за п. 1, який відрізняється тим, що додатково включає операцію тонкої синхронізації символів.
7. Спосіб за п. 1, який відрізняється тим, що його адаптовано для використання у щонайменше одній архітектурі безпровідної системи, а саме у Безпровідній Локальній Мережі (W-LAN) і у системі з множинними входами і множинними виходами (МІМО).
8. Спосіб за п. 1, який відрізняється тим, що його адаптовано для використання у частині оцінювання частоти системи синхронізації в архітектурі безпровідної системи з множинними входами і множинними виходами (МІМО).
9. Спосіб корекції тонкого частотного зсуву після швидкого перетворення Фур'є, який включає:
- прийом сигналу ОМРЧ з одним або більше настроювальними символами, переданого на частині одного з регулярно рознесених субносіїв цього сигналу ОМРЧ;
- перетворення сигналу ОМРЧ у частотну область з використанням ШПФ;
- компенсацію пілотної фази сигналу ОМРЧ з використанням одного або більше настроювальних символів, які відповідають одному або більше настроювальним символам, використаним при генеруванні сигналу ОМРЧ;
- визначення дробового частотного зсуву сигналу ОМРЧ, з урахуванням кількості ненульових пілотних субносіїв і пілотних символів у частотній області;
- корекцію сигналу ОМРЧ згідно з значенням дробового частотного зсуву.
10. Спосіб за п. 9, який відрізняється тим, що операція визначення виконується згідно з рівнянням
![]()
де ![]() - константа, а Р - кількість ненульових пілотних субносіїв.
- константа, а Р - кількість ненульових пілотних субносіїв.
11. Спосіб за п. 9, який відрізняється тим, що операція визначення додатково включає операції:
- визначення наявності більш ніж одного настроювального символу;
- після виявлення більш ніж одного настроювального символу, визначення дробового частотного зсуву, що відповідає кожному настроювальному символу;
- усереднення дробових частотних зсувів, що відповідають кожному настроювальному символу, для визначення середнього дробового частотного зсуву; і
- операція корекції додатково включає корекцію сигналу ОМРЧ згідно з значенням середнього дробового частотного зсуву.
12. Спосіб за п. 9, який відрізняється тим, що додатково включає операції:
- визначення, чи є часова синхронізація недосконалою; і
- повертання фази всіх пілотів на величину, пропорційну індексу субносія, якщо була виявлена недосконалість часової синхронізації.
13. Спосіб за п. 9, який відрізняється тим, що додатково включає операції:
- визначення, чи є часова синхронізація недосконалою;
- визначення наявності більш ніж одного настроювального символу; і
- у випадку недосконалості часової синхронізації і наявності більш ніж одного настроювального символу, повертання фази всіх пілотів на величину, пропорційну індексу субносія і усереднену на зазначених більш ніж одному настроювальних символах.
14. Спосіб за п. 9, який відрізняється тим, що додатково включає операцію демодуляції частотно коригованого сигналу ОМРЧ для отримання символів даних.
15. Спосіб за п. 9, який відрізняється тим, що додатково включає операцію тонкої синхронізації настроювальних символів.
16. Спосіб за п. 9, який відрізняється тим, що його адаптовано для використання у щонайменше одній архітектурі безпровідної системи, а саме у Безпровідній Локальній Мережі (W-LAN) і у системі з множинними входами і множинними виходами (МІМО).
17. Спосіб за п. 9, який відрізняється тим, що його адаптовано для використання у частині оцінювання частоти системи синхронізації в архітектурі безпровідної системи з множинними входами і множинними виходами (МІМО).
18. Пристрій для корекції сигналу ОМРЧ, який включає:
- модуль ШПФ, призначений для перетворення у частотну область сигналу ОМРЧ з одним або більше настроювальними символами, переданого на частині одного з регулярно рознесених субносіїв цього сигналу ОМРЧ;
- модуль компенсації пілотної фази, з'єднаний з зазначеним модулем ШПФ для компенсації пілотної фази сигналу ОМРЧ з використанням одного або більше настроювальних символів, що відповідають одному або більше настроювальним символам, використаним при генеруванні сигналу ОМРЧ;
- модуль дробового частотного зсуву і корекції, з'єднаний з зазначеним модулем компенсації пілотної фази для визначення дробового частотного зсуву сигналу ОМРЧ, базуючись на зазначених одному або більше настроювальних символах, і корекції сигналу ОМРЧ згідно з значенням дробового частотного зсуву.
19. Пристрій за п. 18, який відрізняється тим, що зазначений модуль дробового частотного зсуву і корекції додатково призначений для:
- визначення наявності більш ніж одного настроювального символу;
- після виявлення більш ніж одного настроювального символу, визначення дробового частотного зсуву, що відповідає кожному настроювальному символу;
- усереднення дробових частотних зсувів, що відповідають кожному настроювальному символу, для визначення середнього дробового частотного зсуву;
- причому операція корекції додатково включає корекцію сигналу ОМРЧ згідно з значенням середнього дробового частотного зсуву.
20. Пристрій за п. 18, який відрізняється тим, що додатково включає модуль залишкового часового зсуву, встановлений між зазначеним модулем компенсації пілотної фази і зазначеним модулем дробового частотного зсуву і корекції і призначений для визначення, чи є часова синхронізація недосконалою, і повертання фази всіх пілотів на величину, пропорційну індексу субносія у випадку недосконалості часової синхронізації.
21. Пристрій за п. 18, який відрізняється тим, що додатково включає модуль залишкового часового зсуву, встановлений між зазначеним модулем компенсації пілотної фази і зазначеним модулем дробового частотного зсуву і корекції і призначений для визначення, чи є часова синхронізація недосконалою і чи є у наявності більш ніж один настроювальний символ, і у випадку недосконалості часової синхронізації і наявності більш ніж одного настроювального символу, повертання фази всіх пілотів на величину, пропорційну індексу субносія і усереднену на зазначених більш ніж одному настроювальних символах.
22. Пристрій за п. 18, який відрізняється тим, що додатково включає демодулятор, з'єднаний з зазначеним модулем дробового частотного зсуву і корекції для демодуляції частотно коригованого сигналу ОМРЧ для отримання символів даних.
23. Пристрій за п. 18, який відрізняється тим, що додатково включає модуль часової синхронізації, з'єднаний з зазначеним модулем ШПФ для тонкої синхронізації символів.
24. Пристрій за п. 18, який відрізняється тим, що його адаптовано для використання у щонайменше одній архітектурі безпровідної системи, а саме у Безпровідній Локальній Мережі (W-LAN) і у системі з множинними входами і множинними виходами (МІМО).
25. Пристрій за п. 18, який відрізняється тим, що його адаптовано для використання у частині оцінювання частоти системи синхронізації в архітектурі безпровідної системи з множинними входами і множинними виходами (МІМО).
26. Пристрій для корекції тонкого частотного зсуву після швидкого перетворення Фур'є, який включає:
- модуль ШПФ, призначений для перетворення у частотну область сигналу ОМРЧ з одним або більше настроювальними символами, переданого на частині одного з регулярно рознесених субносіїв цього сигналу ОМРЧ;
- модуль компенсації пілотної фази, з'єднаний з зазначеним модулем ШПФ для компенсації пілотної фази сигналу ОМРЧ з використанням одного або більше настроювальних символів, що відповідають одному або більше настроювальним символам, використаним при генеруванні сигналу ОМРЧ;
- модуль дробового частотного зсуву і корекції, з'єднаний з зазначеним модулем компенсації пілотної фази для визначення дробового частотного зсуву сигналу ОМРЧ з урахуванням кількості ненульових пілотних субносіїв і пілотних символів у частотній області і корекції сигналу ОМРЧ згідно з значенням дробового частотного зсуву.
27. Пристрій за п. 26, який відрізняється тим, що зазначений модуль дробового частотного зсуву і корекції додатково призначений для визначення дробового частотного зсуву сигналу ОМРЧ згідно з рівнянням
![]() ,
,
де ![]() - константа, а Р - кількість ненульових пілотних субносіїв.
- константа, а Р - кількість ненульових пілотних субносіїв.
28. Пристрій за п. 26, який відрізняється тим, що зазначений модуль дробового частотного зсуву і корекції додатково призначений для:
- визначення наявності більш ніж одного настроювального символу;
- після виявлення більш ніж одного настроювального символу, визначення дробового частотного зсуву, що відповідає кожному настроювальному символу;
- усереднення дробових частотних зсувів, що відповідають кожному настроювальному символу, для визначення середнього дробового частотного зсуву;
- причому операція корекції додатково включає корекцію сигналу ОМРЧ згідно з значенням середнього дробового частотного зсуву.
29. Пристрій за п. 26, який відрізняється тим, що додатково включає модуль залишкового часового зсуву, встановлений між зазначеним модулем компенсації пілотної фази і зазначеним модулем дробового частотного зсуву і корекції і призначений для визначення, чи є часова синхронізація недосконалою, і повертання фази всіх пілотів на величину, пропорційну індексу субносія у випадку недосконалості часової синхронізації.
30. Пристрій за п. 26, який відрізняється тим, що додатково включає модуль залишкового часового зсуву, встановлений між зазначеним модулем компенсації пілотної фази і зазначеним модулем дробового частотного зсуву і корекції і призначений для визначення, чи є часова синхронізація недосконалою і чи є у наявності більш ніж один настроювальний символ, і у випадку недосконалості часової синхронізації і наявності більш ніж одного настроювального символу, повертання фази всіх пілотів на величину, пропорційну індексу субносія і усереднену на зазначених більш ніж одному настроювальних символах.
31. Пристрій за п. 26, який відрізняється тим, що додатково включає демодулятор, з'єднаний з зазначеним модулем дробового частотного зсуву і корекції для демодуляції частотно коригованого сигналу ОМРЧ для отримання символів даних.
32. Пристрій за п. 26, який відрізняється тим, що додатково включає модуль часової синхронізації, з'єднаний з зазначеним модулем ШПФ для тонкої синхронізації настроювальних символів.
33. Пристрій за п. 26, який відрізняється тим, що його адаптовано для використання у щонайменше одній архітектурі безпровідної системи, а саме у Безпровідній Локальній Мережі (W-LAN) і у системі з множинними входами і множинними виходами (МІМО).
34. Пристрій за п. 26, який відрізняється тим, що його адаптовано для використання у частині оцінювання частоти системи синхронізації в архітектурі безпровідної системи з множинними входами і множинними виходами (МІМО).
Текст
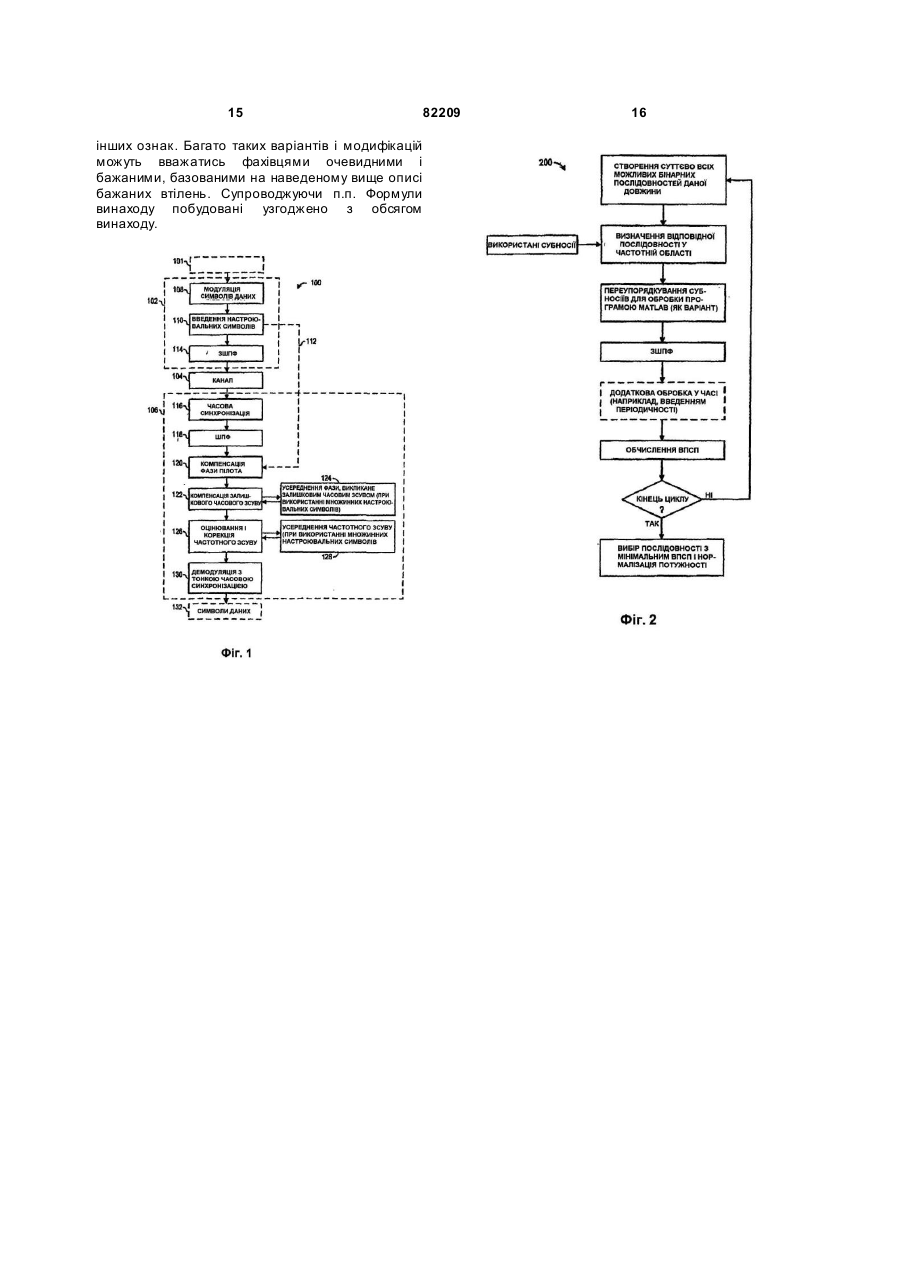
1. Спосіб корекції сигналу ОМРЧ, який включає: - прийом сигналу ОМРЧ з одним або більше настроювальними символами, переданого на частині одного з регулярно рознесених субносіїв цього сигналу ОМРЧ; - перетворення сигналу ОМРЧ у частотн у область з використанням ШПФ; - компенсацію пілотної фази сигналу ОМРЧ з використанням одного або більше настроювальних символів, які відповідають одному або більше настроювальним символам, використаним при генеруванні сигналу ОМРЧ; - визначення дробового частотного зсуву сигналу ОМРЧ, базуючись на зазначених одному або більше настроювальних символах; і - корекцію сигналу ОМРЧ згідно з значенням дробового частотного зсуву. 2. Спосіб за п. 1, який відрізняється тим, що операція визначення додатково включає операції: - визначення наявності більш ніж одного настроювального символу; після виявлення більш ніж одного настроювального символу, визначення дробового частотного зсуву, що відповідає кожному настроювальному символу; 2 (19) 1 3 82209 - прийом сигналу ОМРЧ з одним або більше настроювальними символами, переданого на частині одного з регулярно рознесених субносіїв цього сигналу ОМРЧ; - перетворення сигналу ОМРЧ у частотн у область з використанням ШПФ; - компенсацію пілотної фази сигналу ОМРЧ з використанням одного або більше настроювальних символів, які відповідають одному або більше настроювальним символам, використаним при генеруванні сигналу ОМРЧ; - визначення дробового частотного зсуву сигналу ОМРЧ, з урахуванням кількості ненульових пілотних субносіїв і пілотних символів у частотній області; - корекцію сигналу ОМРЧ згідно з значенням дробового частотного зсуву. 10. Спосіб за п. 9, який відрізняється тим, що операція визначення виконується згідно з рівнянням Ù æ P-1 ~ ö f off = hç å Ð Rl (c s + l r )÷ / P, è=l 0 ø де h - константа, а Р - кількість ненульових пілотних субносіїв. 11. Спосіб за п. 9, який відрізняється тим, що операція визначення додатково включає операції: - визначення наявності більш ніж одного настроювального символу; після виявлення більш ніж одного настроювального символу, визначення дробового частотного зсуву, що відповідає кожному настроювальному символу; - усереднення дробових частотних зсувів, що відповідають кожному настроювальному символу, для визначення середнього дробового частотного зсуву; і - операція корекції додатково включає корекцію сигналу ОМРЧ згідно з значенням середнього дробового частотного зсуву. 12. Спосіб за п. 9, який відрізняється тим, що додатково включає операції: - визначення, чи є часова синхронізація недосконалою; і - повертання фази всіх пілотів на величину, пропорційну індексу субносія, якщо була виявлена недосконалість часової синхронізації. 13. Спосіб за п. 9, який відрізняється тим, що додатково включає операції: - визначення, чи є часова синхронізація недосконалою; - визначення наявності більш ніж одного настроювального символу; і - у випадку недосконалості часової синхронізації і наявності більш ніж одного настроювального символу, повертання фази всіх пілотів на величину, пропорційну індексу субносія і усереднену на зазначених більш ніж одному настроювальних символах. 14. Спосіб за п. 9, який відрізняється тим, що додатково включає операцію демодуляції частотно коригованого сигналу ОМРЧ для отримання символів даних. 4 15. Спосіб за п. 9, який відрізняється тим, що додатково включає операцію тонкої синхронізації настроювальних символів. 16. Спосіб за п. 9, який відрізняється тим, що його адаптовано для використання у щонайменше одній архітектурі безпровідної системи, а саме у Безпровідній Локальній Мережі (W-LAN) і у системі з множинними входами і множинними виходами (МІМО). 17. Спосіб за п. 9, який відрізняється тим, що його адаптовано для використання у частині оцінювання частоти системи синхронізації в архітектурі безпровідної системи з множинними входами і множинними виходами (МІМО). 18. Пристрій для корекції сигналу ОМРЧ, який включає: - модуль ШПФ, призначений для перетворення у частотну область сигналу ОМРЧ з одним або більше настроювальними символами, переданого на частині одного з регулярно рознесених субносіїв цього сигналу ОМРЧ; - модуль компенсації пілотної фази, з'єднаний з зазначеним модулем ШПФ для компенсації пілотної фази сигналу ОМРЧ з використанням одного або більше настроювальних символів, що відповідають одному або більше настроювальним символам, використаним при генеруванні сигналу ОМРЧ; - модуль дробового частотного зсуву і корекції, з'єднаний з зазначеним модулем компенсації пілотної фази для визначення дробового частотного зсуву сигналу ОМРЧ, базуючись на зазначених одному або більше настроювальних символах, і корекції сигналу ОМРЧ згідно з значенням дробового частотного зсуву. 19. Пристрій за п. 18, який відрізняється тим, що зазначений модуль дробового частотного зсуву і корекції додатково призначений для: - визначення наявності більш ніж одного настроювального символу; після виявлення більш ніж одного настроювального символу, визначення дробового частотного зсуву, що відповідає кожному настроювальному символу; - усереднення дробових частотних зсувів, що відповідають кожному настроювальному символу, для визначення середнього дробового частотного зсуву; - причому операція корекції додатково включає корекцію сигналу ОМРЧ згідно з значенням середнього дробового частотного зсуву. 20. Пристрій за п. 18, який відрізняється тим, що додатково включає модуль залишкового часового зсуву, встановлений між зазначеним модулем компенсації пілотної фази і зазначеним модулем дробового частотного зсуву і корекції і призначений для визначення, чи є часова синхронізація недосконалою, і повертання фази всіх пілотів на величину, пропорційну індексу субносія у випадку недосконалості часової синхронізації. 21. Пристрій за п. 18, який відрізняється тим, що додатково включає модуль залишкового часового зсуву, встановлений між зазначеним модулем компенсації пілотної фази і зазначеним модулем 5 82209 дробового частотного зсуву і корекції і призначений для визначення, чи є часова синхронізація недосконалою і чи є у наявності більш ніж один настроювальний символ, і у випадку недосконалості часової синхронізації і наявності більш ніж одного настроювального символу, повертання фази всіх пілотів на величину, пропорційну індексу субносія і усереднену на зазначених більш ніж одному настроювальних символах. 22. Пристрій за п. 18, який відрізняється тим, що додатково включає демодулятор, з'єднаний з зазначеним модулем дробового частотного зсуву і корекції для демодуляції частотно коригованого сигналу ОМРЧ для отримання символів даних. 23. Пристрій за п. 18, який відрізняється тим, що додатково включає модуль часової синхронізації, з'єднаний з зазначеним модулем ШПФ для тонкої синхронізації символів. 24. Пристрій за п. 18, який відрізняється тим, що його адаптовано для використання у щонайменше одній архітектурі безпровідної системи, а саме у Безпровідній Локальній Мережі (W-LAN) і у системі з множинними входами і множинними виходами (МІМО). 25. Пристрій за п. 18, який відрізняється тим, що його адаптовано для використання у частині оцінювання частоти системи синхронізації в архітектурі безпровідної системи з множинними входами і множинними виходами (МІМО). 26. Пристрій для корекції тонкого частотного зсуву після швидкого перетворення Фур'є, який включає: - модуль ШПФ, призначений для перетворення у частотну область сигналу ОМРЧ з одним або більше настроювальними символами, переданого на частині одного з регулярно рознесених субносіїв цього сигналу ОМРЧ; - модуль компенсації пілотної фази, з'єднаний з зазначеним модулем ШПФ для компенсації пілотної фази сигналу ОМРЧ з використанням одного або більше настроювальних символів, що відповідають одному або більше настроювальним символам, використаним при генеруванні сигналу ОМРЧ; - модуль дробового частотного зсуву і корекції, з'єднаний з зазначеним модулем компенсації пілотної фази для визначення дробового частотного зсуву сигналу ОМРЧ з урахуванням кількості ненульових пілотних субносіїв і пілотних символів у частотній області і корекції сигналу ОМРЧ згідно з значенням дробового частотного зсуву. 27. Пристрій за п. 26, який відрізняється тим, що зазначений модуль дробового частотного зсуву і корекції додатково призначений для визначення дробового частотного зсуву сигналу ОМРЧ згідно з рівнянням Ù æ P-1 ~ ö f off = h ç å Ð Rl (c s + l r )÷ / P , è l =0 ø 6 де h - константа, а Р - кількість ненульових пілотних субносіїв. 28. Пристрій за п. 26, який відрізняється тим, що зазначений модуль дробового частотного зсуву і корекції додатково призначений для: - визначення наявності більш ніж одного настроювального символу; після виявлення більш ніж одного настроювального символу, визначення дробового частотного зсуву, що відповідає кожному настроювальному символу; - усереднення дробових частотних зсувів, що відповідають кожному настроювальному символу, для визначення середнього дробового частотного зсуву; - причому операція корекції додатково включає корекцію сигналу ОМРЧ згідно з значенням середнього дробового частотного зсуву. 29. Пристрій за п. 26, який відрізняється тим, що додатково включає модуль залишкового часового зсуву, встановлений між зазначеним модулем компенсації пілотної фази і зазначеним модулем дробового частотного зсуву і корекції і призначений для визначення, чи є часова синхронізація недосконалою, і повертання фази всіх пілотів на величину, пропорційну індексу субносія у випадку недосконалості часової синхронізації. 30. Пристрій за п. 26, який відрізняється тим, що додатково включає модуль залишкового часового зсуву, встановлений між зазначеним модулем компенсації пілотної фази і зазначеним модулем дробового частотного зсуву і корекції і призначений для визначення, чи є часова синхронізація недосконалою і чи є у наявності більш ніж один настроювальний символ, і у випадку недосконалості часової синхронізації і наявності більш ніж одного настроювального символу, повертання фази всіх пілотів на величину, пропорційну індексу субносія і усереднену на зазначених більш ніж одному настроювальних символах. 31. Пристрій за п. 26, який відрізняється тим, що додатково включає демодулятор, з'єднаний з зазначеним модулем дробового частотного зсуву і корекції для демодуляції частотно коригованого сигналу ОМРЧ для отримання символів даних. 32. Пристрій за п. 26, який відрізняється тим, що додатково включає модуль часової синхронізації, з'єднаний з зазначеним модулем ШПФ для тонкої синхронізації настроювальних символів. 33. Пристрій за п. 26, який відрізняється тим, що його адаптовано для використання у щонайменше одній архітектурі безпровідної системи, а саме у Безпровідній Локальній Мережі (W-LAN) і у системі з множинними входами і множинними виходами (МІМО). 34. Пристрій за п. 26, який відрізняється тим, що його адаптовано для використання у частині оцінювання частоти системи синхронізації в архітектурі безпровідної системи з множинними входами і множинними виходами (МІМО). 7 82209 Винахід стосується взагалі безпровідного зв'язку і, зокрема, нескладних способу і відповідного пристрою для корекції тонкого частотного зсуву після ШПФ у розширеному діапазоні виявлення. У широкосмуговому безпровідному зв'язку ортогональне мультиплексування з розділенням частот (ОМРЧ) є окремим випадком багатоносійної модуляції (БНМ), принцип якої полягає у передачі даних з розділенням потоку біт на декілька потоків і модуляцією кожним з цих потоків біт індивідуальних носив або субносіїв. У звичайних системах ОМРЧ використовується зворотне швидке перетворення Фур'є (ЗШПФ) і пряме швидке перетворення Фур'є (ШПФ) для модуляції і демодуляції інформаційних даних, відповідно. Системи ОМРЧ є чутливими до зсувів частоти, які можуть спричинити втрату ортого-нальності у субносіях і, як результат, міжносійну інтерференцію (МНІ). Такі частотні зсуви можуть викликатись різними причинами, включаючи різницю частот передавача і приймача, зумовлену допусками локальних генераторів, допплерівським зсувом, викликаним рухом мобільної станції, відбиваючими об'єктами на шляху проходження і додатковими шумами, які можуть внести миттєвий фазовий шум. Оскільки передача з ОМРЧ суттєво порушується частотними зсувами, виникає необхідність коригувати цей зсув у приймачі. Існують багато рішень цієї проблеми, які передбачають обробку як у часі (до ШПФ), так і частотній області (після ШПФ). Зокрема, був запропонований алгоритм корекції після ШПФ, який базується на повторенні даного настроювального символу (Moose, "A Technique for Orthogonal Frequency Division Multiplexing Frequency Offset Correction (Техніка корекції зсуву частоти ОМРЧ)", IEEE, 1994). Такій "після-ШПФ" алгоритм може виконувати корекцію у межах ±0,5 міжносійного проміжку (відомого як "субно-сійний проміжок") і потребує щонайменше двох настроювальних символів; однак, дія цього алгоритму є еквівалентною дії "до-ШПФ" алгоритму, базованого на кореляції циклічного префікса (ЦП), який також забезпечує корекцію до ±0,5 міжносійного проміжку. Звичайно існуючі алгоритми корекції частотного зсуву комбінують з алгоритмом грубого частотного зсуву, якщо передавальна система призначена працювати з частотним зсувом, більшим за ±0,5 міжносійного проміжку. Аналіз існуючого рівня техніки показує, що "після-ШПФ" обробка часто використовується для виявлення великих частотних зсувів, але не часто використовується для тонкої синхронізації частот внаслідок наявності МНІ. Відповідно, були проведені дослідження, спрямовані на розвиток методів, які можна застосувати для "після-ШПФ" корекції' тонких частотних зсувів. Задачею винаходу є створення способу реалізації "після-ШПФ" корекції тонкого частотного зсуву; зокрема, винахід стосується алгоритмів, що 8 використовуються у системах, базованих на ОМРЧ. Згідно з винаходом, визначаються настроювальні символи для включення у кадрову структур у ефірного інтерфейсу і в алгоритм, здатний ефективно оцінювати дробовий частотний зсув (тобто менший за одиничний міжносійний проміжок). Цей алгоритм може бути модифікований з використанням більш складних технічних елементів для оцінювання великих частотних зсувів (наприклад, більших за одиничний міжносійний проміжок). У найпростішому втіленні такий алгоритм не потребує блоку корелятора. Щодо нечутливості до шумів, виявлення частоти як таке показує відмінну ефективність в умовах низького відношення сигнал/шум. Однак, в умовах наявності шумів разом з часовим відхиленням, параметри системи можуть бути побудовані таким чином, щоб забезпечити якісну роботу в умовах низького відношення сигнал/шум. В одному з бажаних втілень винаходу для виконання "після-ШПФ" корекції тонкого частотного зсуву сигнал ОМРЧ, який має один або більше настроювальних символів, передається на частині регулярно рознесеного субносія сигналу ОМРЧ, а сигнал ОМРЧ перетворюється у частотну область з використанням ШПФ. Пілотна фаза сигналу ОМРЧ компенсується з використанням цих одного або більше настроювальних символів, які відповідають одному або більше настроювальним символам, застосованим при генеруванні сигналу ОМРЧ. Визначення дробового частотного зсуву сигналу ОМРЧ базується на настроювальних символах, і сигнал ОМРЧ коригується згідно з визначеним дробовим частотним зсувом. Приймальний "після-ШПФ" алгоритм може також бути ефективно використаний в архітектурі ΜΙΜΟ. Одна з переваг винаходу визначається можливістю введення в нього частини ефірного інтерфейсу, а не лише приймальним алгоритмом. Отже, був наведений загальний опис ознак і переваг винаходу, який передує наведеному далі детальному опису винаходу. У цьому описі розглядаються особливості і переваги винаходу, покладені в основу п.п. Формули винаходу. Концепції' винаходу і його окремі втілення можуть бути використані фахівцем для модифікування і розробки інших стр уктур, здатних виконувати ті ж функції'. Зрозуміло, що такі еквівалентні структури мають відповідати концепціям і обсягу винаходу, викладеним у Формулі винаходи. Більш повному розумінню винаходу і його переваг сприятиме наведений далі опис з посиланнями на креслення, в яких: Фіг.1 - концептуальна блок-схема високого рівня, яка ілюструє безпровідну систему зв'язку, в якій втілено винахід, і Фіг.2 - схема операцій, яка ілюструє логіку втілення основних ознак винаходу у побудові настроювальних послідовностей для обчислення настроювальних символів. Далі розглядаються окремі деталі, які дають повне розуміння винаходу. Зрозуміло, що винахід 9 82209 може бути реалізований і без такого детального опису. Добре відомі елементи показані схематично або блоками, щоб не перевантажувати опис зайвими деталями. У більшості випадків деталі, що стосуються безпровідного зв'язку, ОМРЧ, ШПФ тощо, ігноруються, оскільки не є необхідними для повного розуміння винаходу і вважаються відомими фахівцю. Якщо не визначено інше, описані функції виконуються процесором, наприклад, мікропроцесором, мікроконтролером, спеціалізованою мікросхемою (ASIC), електронним процесором даних, комп'ютером тощо, згідно з кодом, наприклад, кодом програми, програмним забезпеченням, інтегральними схемами тощо, які кодуються для виконання цих функцій. Вважається, що конструкція, розробка і особливості застосування таких кодів є відомими фа хівцям, які розглядають даний опис винаходу. Як уже відзначалось, згідно з існуючим рівнем техніки "після-ШПФ" обробку часто використовують для виявлення великих частотних зсувів, але рідко для тонкої синхронізації' частот внаслідок наявності МНІ. Згідно з винаходом, МНІ обмежується завдяки навчаючим символам, для яких використовується лише частина субносіїв. Активні (пілотні) субносії рознесені регулярно, завдяки чому навіть за наявності частотного зсуву вплив найближчих носіїв послаблюється. "ПісляШПФ" фаза субносіїв є прямо пропорційною частотному зсуву, як можна бачити з наступного. Оскільки Df = Δf1 + DfF = (n1 +Df’)/Т, де Df 1 цілий зсув, DfF - дробовий зсув, а Т - період символів (виключаючи ЦП), то можна показати, що для m-го елемента ШПФ: де ІМНІm зумовлено МНІ, a Nm - адитивним шумом, як це показано у роботі [K.Takahashi, T.Saba "Frequency Synchronization for Offset over the Subcarrier Spacing in OFDM Systems Синхронізація частот на інтервалах субносіїв у системах ОМРЧ)", Chiba Institute of Techmol-ogy, 2002]. Згідно з винаходом, якщо не брати до уваги член, зумовлений МНІ, і відкинути внесок шумів, можна легко показати, що єдиним членом, який може впливати на фазу, є ejpDf’(N1)/N. Частотний зсув до N/(N-1) міжносійних інтервалів (субносійних інтервалів) можна оцінити як: Р-1 η = const, P - кількість ненульових носіїв. Якщо Ri - пілотні символи після обробки ШПФ, то Ri - пілоти, оброблені, як це описано нижче. Система 100 (Фіг.1) безпровідного зв'язку, в якій може бути втілений винахід, включає передавач 102, призначений підтримувати зв'язок з приймачем 106 через канал 104 зв'язку. Передавач 102 і приймач 106 мають кожний схемні модулі і пов'язані з ними компоненти, як це зрозуміло фахівцю, які відповідають опису винаходу. Передавач 102 включає модуляційний модуль 108 для прийому і звичайного модулювання 10 одного або більше символів 101 даних з перетворенням у сигнал ОМРЧ в частотній області. Модуль 110 настроювальних символів має зв'язок з модуляційним модулем 108 для введення одного або більше настроювальних символів k(t) у кадрову стр уктур у модульованих символів даних, що утворюють сигнал ОМРЧ. Згідно з винаходом, настроювальні символи k(t) передаються з використанням лише регулярно рознесених носіїв, тобто пілотних субносіїв, до модуля 120 (див. нижче) компенсації' "після-ШПФ" пілотної фази, і тому навіть за присутності частотного зсуву вплив найближчих субносіїв послаблюється завдяки наявності інтервалу невикористаних носив. Якщо сигнал ОМРЧ у передавачі 102 репрезентувати як: то один або більше настроювальних символів k(t), що генеруються модулем 110 символів, бажано визначати як: де α - константа, яка регулює амплітуду сигналу часу, ρ і Cs регулюють розподілення пілотів у настроювальних символах. В іншому варіанті настроювальні символи можуть бути визначені як: де К(І) - код нижнього ВПСП (Відношення Піку до Середньої Потужності), наприклад, Κ(Ι) = α·(1 + j)×(-1)n n = 0,1,0,1,1,0,1,1,0,0,0,0,... У бажаному втіленні можна поліпшити ВПСП, використовуючи настроювальні символи, які є періодичним повторенням на осі частот, наприклад, таких послідовностей: K(l) = a×(1+j)×1,-1,-1,-1,1,1,-1,1,1,-1,1,-1,1,-1) (довжина 14, ВПСП = 5,29 дБ) Κ(Ι) = α·(1+j)·(1,1,-1,-1,1,-1,1,-1,-1,1,1,1,-1,1,1,-1) (довжина 16, ВПСП = 4,85 дБ) Суттєво оптимальні послідовності можна визначати для будь-якої кількості субносіїв і пілотних інтервалів, логіка однієї з них як приклад, наведена у схемі 200 операцій (Фіг.2). Настроювальна послідовність, ілюстрована схемою 200, генерує один настроювальний символ, для декількох настроювальних символів можна побудувати послідовність декількох 11 82209 ідентичних символів (поставлених один за одним) або різних символів. Можна використати різні настроювальні послідовності, відмінні від ілюстрованої Фіг.2, але вони далі не розглядатимуться, оскільки можуть бути побудовані фа хівцем самостійно на основі даного опису. Модуль 114 ЗШПФ (Фіг.1), включений між модулем 110 настроювальних символів і каналом 104, слугує для перетворення сигналу ОМРЧ з частотної області у часову для передачі каналом 104. Канал 104, бажано, включає звичайні засоби передачі сигналу ОМРЧ від передавача 102 до приймача 106. Такі засоби можуть включати, наприклад, антенні структури і допоміжне обладнання для генерування і передачі передавачем 102 і прийому приймачем 106 сигналу ОМРЧ у діапазоні радіочастот (РЧ). Такі канали, як канал 104, є добре відомими і не розглядаються детально. На приймальному боці каналу 104 приймач 106 має модуль 116 часової синхронізації', призначений синхронізувати у часі приймач 106 з частотою прийнятого сигналу ОМРЧ. Модуль 118 ШПФ, який має зв'язок з модулем 116 синхронізації', перетворює сигнал ОМРЧ з часової області у частотну. Модулі 116,118 є добре відомими. Згідно з винаходом, "після-ШПФ" фаза субносіїв є прямо пропорційною частотному зсуву. Модуль 120 компенсації' фазового зсуву має зв'язок з модулем 118 ШПФ для компенсації фази сигналу ОМРЧ, базуючись на значеннях пілотних субносіїв, відомих у приймачі і використовуючи настроювальні символи (показані пунктиром 112), що використовуються модулем 110 введення настроювальних символів передавача 102. Якщо Ri - пілотні символи після обробки ШПФ, то Ri пілоти, оброблені зворотним повертанням первісної пілотної фази. Зокрема, для ka(t): а для kb(t): Модуль 122 компенсації залишкового зсуву має зв'язок з модулем 120 компенсації пілотної фази для компенсації залишкового часового зсуву сигналу ОМРЧ, а модуль 124 усереднення фази операційно з'єднаний з модулем 122 остаточної компенсації часового зсуву. Модуль 122 пристосований визначати, чи є часова синхронізація недосконалою, базуючись на попередній оцінці повертання фази між двома послідовними пілотами. Ця оцінка є дуже чутливою до шумів і звичайно вносить неточність у часову синхронізацію. Якщо визначено, що часова синхронізація є недосконалою, фаза всіх пілотів повертається на величину, пропорційну індексу субносія. Цей фазовий зсув можна легко коригувати через оцінку середнього повертання фази між двома послідовними пілотами. У бажаному втіленні цю оцінку можна одержати, застосувавши, наприклад, Matlab-код: %correction of timing offset 12 phase_accum = 0 for aux = 2: length [pilot_subc_idx] ph_diff = angle (rx_f_sig(pilot_subcjdx(aux-1))) angle (rx_f_sig(pilot_subc_idx(aux))); if abs (ph-diff) > pi ph_diff = ph_diff - sign(ph_didd)*2*pi % компенсація неоднозначності фази end; phase_accum = phase_accum + ph_diff; end; phase_accum = phase_accum/(length (pilot_subc_idx) - 1)/(det_range +1); for aux = 1: length [pilot_subc_idx] rx_f_sig(pilot_subc_idx(aux)) = rx_f_sig(pilot_subc_idx(aux))*exp(j*phase_accum*(pili t_subc1)); end; Звичайно нема необхідності працювати з значеннями пілотних символів, можна обмежитись їх фазами, і тому реалізацію винаходу можна здійснити, використовуючи лише операції складання і віднімання. Наприклад, якщо використовува ти фази пілотних символів, фази можна складати і віднімати, не користуючись комплексними експоненційними значеннями. Якщо виявляється, що оцінка середнього повертання фази між двома послідовними пілотами була виконана і тонка часова синхронізація є дуже неточною, то для належного функціонування в умовах дуже низького відношення сигнал/шум цю оцінку повертання фази бажано усереднити на декількох настроювальних символах у модулі 124 усереднення фази. Ця операція не потребує наявності буфера, оскільки достатньо зберігати одне значення для кожного символу. Модуль 126 оцінювання і корекції частотного зсуву має зв'язок з модулем 122 компенсації залишкового часового зсуву для подальшої обробки сигналу ОМРЧ, а модуль 128 усереднення частотного зсуву має операційний зв'язок з модулем 126. Згідно з винаходом, модуль 126 компенсації фазового зсуву оцінює дробовий частотний зсув, обчислений згідно з співвідношенням: де η - константа, а Р - кількість ненульових пілотних субноаїв. Модуль 126 оцінювання і корекції частотного зсуву також пристосований для визначення, чи потребує система 100 множинних настроювальних символів і, якщо так, обчислює частотний зсув для кожного настроювального символу, а модуль 128 усереднення частотного зсуву пристосований усереднювати частотні зсуви у часовій області, бажано, без буферування пакетів. Модуль 126 також коригує частоту, використовуючи частотний зсув, оцінений з усередненням або без нього. Модуль 130 демодуляції' має зв'язок з модулем 126 оцінювання і корекції частотного зсуву для демодулювання сигналу ОМРЧ і, як варіант, для тонкої часової синхронізації (додатково до синхронізації', виконаної модулем 116), генеруючи при цьому символи 132 даних, що 13 82209 відповідають символам 101 даних, прийнятих передавачем 102. Для передачі і обробки символів 132 даних модуль 130 демодуляції має зв'язок з звичайними добре відомими модулями (не показаними). При роботі потік символів 101 даних приймається передавачем 102. Ці символи модулюються модуляційним модулем 108 на сигнал ОМРЧ в частотній області. Настроювальні символи додаються до символів даних у модулі 110, і ЗШПФ перетворює сигнал ОМРЧ з частотної області у часову для передачі у каналі 104. Після цього символи даних передаються у каналі 104 до приймача 106. У приймачі 106 модуль 116 синхронізації синхронізує у часі приймач 106 з частотою сигналу ОМРЧ, прийнятим від передавача 102 через канал 104. Модуль 118 ШПФ перетворює сигнал ОМРЧ з часової області у частотн у. Модуль 120 компенсації фазового зсуву компенсує фазу сигналу ОМРЧ, базуючись на значеннях пілотних субносіїв, відомих у приймачі, і використовуючи настроювальні символи (показані пунктиром 112), що були використані модулем 110 введення настроювальних символів передавача 102. Модуль 122 компенсації залишкового часового зсуву визначає наявність недосконалої часової синхронізації з сигналом ОМРЧ і, якщо вона має місце, фази всіх пілотів повертаються на величину, пропорційну індексу субносія. Цей фазовий зсув можна легко коригувати через оцінку середнього повертання фази між двома послідовними пілотами. Далі модуль 122 визначає наявність неточності тонкої часової синхронізації і, якщо ця синхронізація є дуже неточною, то для належного функціонування в умовах дуже низького відношення сигнал/шум ця оцінка повертання фази, бажано, усереднюється на декількох настроювальних символах у модулі 124 усереднення фази. Модуль 126 оцінювання і корекції частотного зсуву оцінює дробовий частотний зсув, обчислений згідно з співвідношенням: де η - константа, а Р - кількість ненульових пілотних субносіїв. Модуль 126 оцінювання і корекції частотного зсуву також визначає, чи потребує система 100 множинних настроювальних символів і, якщо так, обчислює частотний зсув для кожного настроювального символу, а модуль 128 усереднення частотного зсуву усереднює частотні зсуви у часовій області, бажано, без буфер ування пакетів. Далі частота коригується частотним зсувом, оціненим з усередненням або без нього. Модуль 130 демодуляції демодулює сигнал ОМРЧ і символи 132 даних, що відповідають символам 101 даних, і надсилає результат до звичайних модулів для подальшої обробки. Використання винаходу, зокрема розглянутого вище алгоритму компенсації пілотної фази у модулях 126, 128 (наприклад, при частотному зсуві, меншому за один міжносійний інтервал), 14 дозволяє ефективно отримати оцінку дробового частотного зсуву. Зокрема, діапазон виявлення у приймачі розширюється до ±(1 - e) міжносійних інтервалів порівняно з ±0,5 міжносійних інтервалів в існуючих алгоритмах. Належна обробка МНІ з використанням відповідної структури настроювальних символів дозволяє знизити e до 0,02. Системи типу IEEE 802.1 потребують корекції у межах ±0,8 міжносійних інтервалів, і, таким чином, цей алгоритм буде достатнім для повної частотної синхронізації. Залежно від виконання приймача алгоритм згідно з винаходом може бути дешевшим у реалізації, ніж інші алгоритми. Винахід не потребує блоку кореляції. Крім того, на відміну від існуючих способів винахід не потребує щонайменше двох настроювальних символів, а може працювати з одним таким символом. Використання множинних настроювальних символів не є обов'язковим і слугує лише для зниження впливу шумів при усередненні. Алгоритм згідно з винаходом потребує лише мінімальної пам'яті без буферування пакетів, навіть у випадку усереднення на декількох настроювальних символах. Крім того, ВПСП можна знизити до прийнятного рівня застосуванням належним чином побудованих настроювальних символів. Зрозуміло, що винахід може бути втілений у різних формах. Відповідно, описані втілення припускають різні модифікації у межах обсягу винаходу. Наприклад, алгоритм оцінювання і корекції частотного зсуву, що використовується у модулях 126,128 може бути модифікований зниженням зсуву до ±0,5 міжносійних інтервалів за допомогою блоку кореляції між модулем 118 ШПФ і модулем 120 компенсації пілотної фази для оцінювання значних частотних зсувів (наприклад, більше одного міжносійного інтервалу). Тобто, якщо потрібно розширити діапазон виявлення у приймачі, то алгоритм, що використовується у модулях 126, 128 оцінювання і корекції частотного зсуву, слід з'єднати з алгоритмом, що коригує зсуви, кратні міжносійним інтервалам, виявляючи максимум кореляції між "після-ШПФ" настроювальними символами і первісними настроювальними символами. В іншому варіанті алгоритм, що використовується у модулях 126, 128 оцінювання і корекції частотного зсуву, може бути ефективно використаний у багатьох системах з ОМРЧ, наприклад у W-LAN (безпровідні локальні мережі, наприклад, IEEE 802.1), архітектурі системи ΜΙΜΟ (з множинними входами і множинними виходами) (наприклад, в оцінювальній частині системи синхронізації ΜΙΜΟ) то що. В ще одному варіанті винахід може бути застосований з настроювальними символами, відмінними від описаних. Наведений вище опис бажаних втілень винаходу є ілюстративним і не обмежує винаходу, причому численні варіанти, модифікації, зміни і заміни є припустимими згідно з наведеним вище описом, а у деяких випадках деякі ознаки можуть бути використані без відповідного використання 15 інших ознак. Багато таких варіантів і модифікацій можуть вважатись фахівцями очевидними і бажаними, базованими на наведеному вище описі бажаних втілень. Супроводжуючи п.п. Формули винаходу побудовані узгоджено з обсягом винаходу. 82209 16
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and a device for correction of fine frequency off-set furrier fast transformation
Автори англійськоюPriotti Paolo
Назва патенту російськоюСпособ и устройство для выполнения коррекции тонкого частотного сдвига после быстрого преобразования фурье
Автори російськоюПриотти Паоло
МПК / Мітки
МПК: H04L 27/26
Мітки: пристрій, перетворення, виконання, корекції, швидкого, спосіб, зсуву, тонкого, фур'є, частотного
Код посилання
<a href="https://ua.patents.su/8-82209-sposib-i-pristrijj-dlya-vikonannya-korekci-tonkogo-chastotnogo-zsuvu-pislya-shvidkogo-peretvorennya-fureh.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для виконання корекції тонкого частотного зсуву після швидкого перетворення фур’є</a>
Пристрій для виконання швидкого перетворення фур’є
Номер патенту: 22172
Опубліковано: 30.06.1998
Автор: Миронов Іван Якович
МПК: G06F 17/14
Мітки: пристрій, перетворення, виконання, швидкого, фур'є
Формула / Реферат:
1. Устройство для выполнения быстрого преобразования Фурье, содержащее блок оперативной памяти, блок хранения весовых коэффициентов, формирователь адреса операндов, формирователь адреса весовых коэффициентов, первый арифметический блок и счетчик номера итерации, причем второй информационный вход и первый выход блока оперативкой памяти соединены соответственно с выходом и первым входом первого арифметического блока, второй вход которого...
Арифметичний пристрій для виконання швидкого перетворення хартлі-фур’є
Номер патенту: 53216
Опубліковано: 15.01.2003
Автор: Волинець Віктор Іванович
МПК: G06F 17/14
Мітки: виконання, перетворення, хартлі-фур'є, пристрій, арифметичний, швидкого
Формула / Реферат:
Арифметичний пристрій для виконання швидкого перетворення Хартлі-Фур'є, що містить два помножувачі комплексних чисел, перший комутатор та шість суматорів-віднімачів, причому перший, другий, третій та четвертий входи операндів пристрою підключені до перших входів відповідно першого, другого, третього та четвертого суматорів-віднімачів, п'ятий та шостий і сьомий та восьмий входи операндів пристрою підключені до першого та другого входів...
Арифметичний пристрій для виконання швидкого перетворення хартлі-фур’є
Номер патенту: 53218
Опубліковано: 15.01.2003
Автор: Волинець Віктор Іванович
МПК: G06F 17/14
Мітки: виконання, швидкого, пристрій, арифметичний, перетворення, хартлі-фур'є
Формула / Реферат:
Арифметичний пристрій для виконання швидкого перетворення Хартлі-Фур'є, що містить два помножувачі комплексних чисел, перший комутатор та шість суматорів-віднімачів, причому перший та другий входи першого, другого та четвертого суматорів-віднімачів підключені відповідно до першого, п'ятого, другого, шостого, четвертого та восьмого входів операндів пристрою, виходи суми з першого по четвертий суматорів-віднімачів є відповідно першим, другим,...
Пристрій для формування адрес процесора швидкого перетворення фур’є
Номер патенту: 53219
Опубліковано: 15.01.2003
Автор: Волинець Віктор Іванович
МПК: G06F 17/14
Мітки: перетворення, формування, адрес, процесора, фур'є, швидкого, пристрій
Формула / Реферат:
1. Пристрій для формування адрес процесора швидкого перетворення Фур'є, що містить перший і другий лічильники, блок постійної пам’яті, групу з N (N - максимальна розрядність адреси) мультиплексорів, перший мультиплексор, перший регістр та блок керування, тактовий вхід якого є тактовим входом пристрою, інформаційними виходами якого є виходи першого регістра, тактовий вхід якого підключений до другого виходу блока керування, перший вихід якого...
Спосіб зсуву фази сигналу
Номер патенту: 82178
Опубліковано: 25.03.2008
Автор: Долгін Володимир Прохорович
МПК: H03H 11/02
Мітки: сигналу, фазі, спосіб, зсуву
Формула / Реферат:
Спосіб зсуву фази сигналу, заснований на цифровому перетворенні сигналу з введенням часового зсуву, який відрізняється тим, що виконують дискретизацію сигналу за часом, зсувають на заданий часовий інтервал його значення та підсумовують це значення з приростом сигналу за час кроку дискретизації.
Попередній патент: 4-оксо-1-(3-заміщені феніл)-1,4-дигідро-1,8-нафтиридин-3-карбоксаміди як інгібітори фосфодіестерази-4
Наступний патент: Муфта сполучна пластинчаста
Випадковий патент: Пристрій для водних атракціонів