Вертолітна система електромагнітної розвідки
Формула / Реферат
1. Система аероелектромагнітної розвідки, яка містить
пристрій генераторної петлі, прикріплений до буксирувального літального апарата і пристосований для буксирування цим апаратом,
передавальний засіб, який розташовано у пристрої генераторної петлі для генерації первинного електромагнітного поля,
прийомний засіб, призначений для прийому первинного електромагнітного поля і вторинного результуючого електромагнітного поля, що виникає в результаті взаємодії первинного поля з підземними провідними об'єктами, над якими переміщається буксирувальний літальний апарат, і
гондолу з високим аеродинамічним опором, прикріплену до пристрою генераторної петлі і буксирувального літального апарата з можливістю буксирування ними, і утримуючий корпус для розміщення прийомного засобу, твердий наконечник, що відходить від корпуса і забезпечує приєднання гондоли до пристрою генераторної петлі, і вузол вилки, що відходить від корпуса і забезпечує приєднання гондоли до буксирувального літального апарата,
при цьому забезпечена підтримка по суті постійного просторового і кутового розташування прийомного засобу стосовно передавального засобу в діапазоні повітряних швидкостей проведення електромагнітної розвідки.
2. Система аероелектромагнітної розвідки за п. 1, яка відрізняється тим, що гондола з високим аеродинамічним опором обладнана гальмовим парашутом для її втримання в основному на одній лінії із пристроєм генераторної петлі.
3. Система аероелектромагнітної розвідки за п. 2, яка відрізняється тим, що гальмовий парашут має високий лобовий опір і приєднаний або до корпуса, у якому розміщено прийомний засіб, або до вузла вилки.
4. Система аероелектромагнітної розвідки за будь-яким з попередніх пунктів, яка відрізняється тим, що гондола з високим аеродинамічним опором додатково обладнана крилом.
5. Система аероелектромагнітної розвідки за будь-яким з попередніх пунктів, яка відрізняється тим, що пристрій генераторної петлі містить центральну частину, з якою несучий вузол з'єднаний шарнірно для установки передавального засобу,
зіркоподібну частину, що містить групу спиць, що відходять радіально від центральної частини, і
щонайменше одну рамку генераторної петлі, що охоплює спиці.
6. Система аероелектромагнітної розвідки за будь-яким з попередніх пунктів, яка відрізняється тим, що пристрій генераторної петлі прикріплений до буксирувального літального апарата за допомогою буксирувального вузла, що містить буксирувальні канати, прикріплені до рознесених точок кріплення на пристрої генераторної петлі і об'єднані в одному місці, що з'єднує, у свою чергу, з буксирувальним літальним апаратом за допомогою додаткового буксирувального каната.
7. Система аероелектромагнітної розвідки за будь-яким з попередніх пунктів, яка відрізняється тим, що пристрій генераторної петлі знаходиться в одній горизонтальній площині з буксирувальним канатом, що проходить між гондолою з високим аеродинамічним опором і периферійною точкою пристрою генераторної петлі.
8. Система аероелектромагнітної розвідки за будь-яким з пп. 1-6, яка відрізняється тим, що пристрій генераторної петлі знаходиться в одній по суті вертикальній площині з буксирувальним вузлом, що з'єднує пристрій генераторної петлі з гондолою з високим аеродинамічним опором.
9. Система аероелектромагнітної розвідки за будь-яким з попередніх пунктів, яка відрізняється тим, що як буксирувальний літальний апарат використаний вертоліт.
Текст
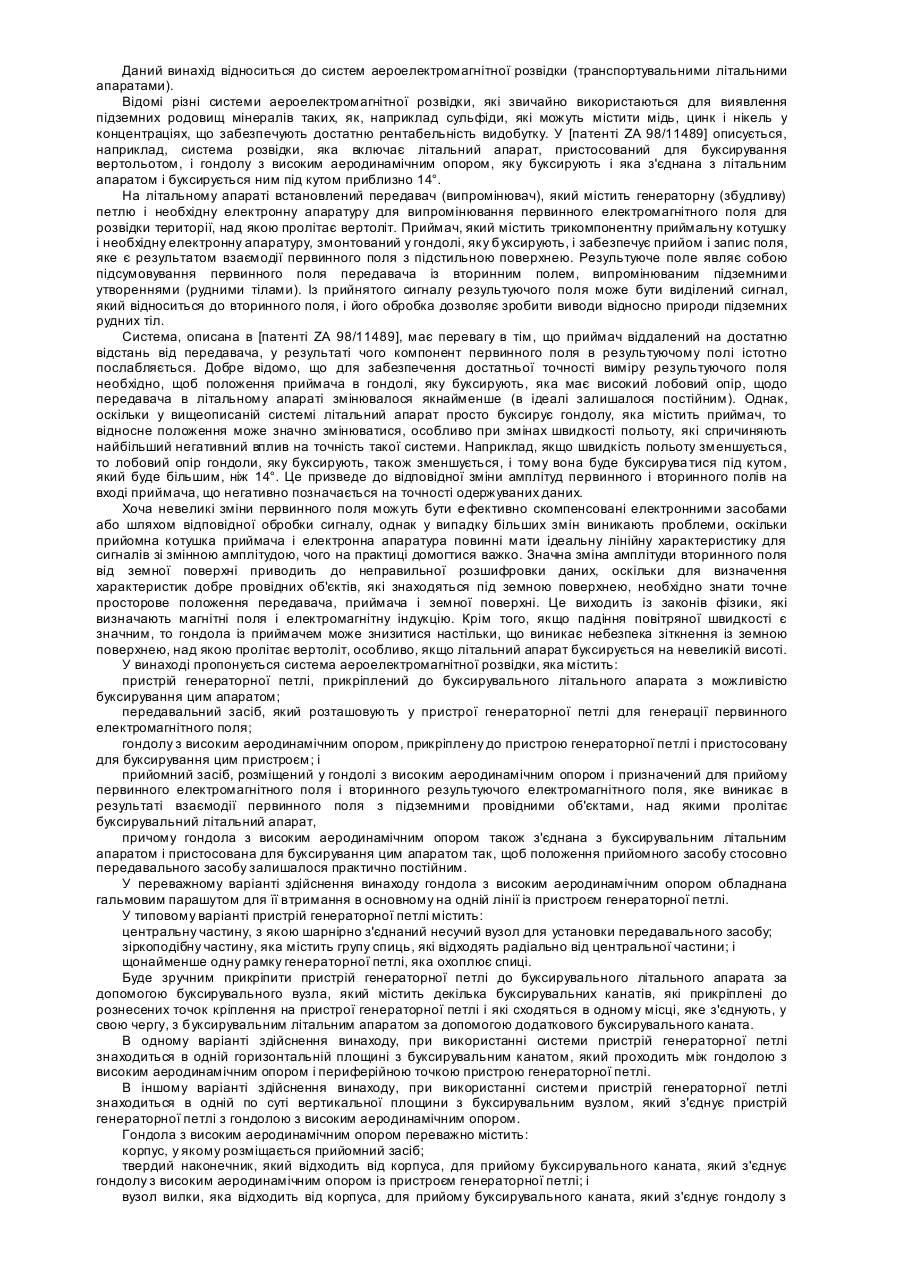
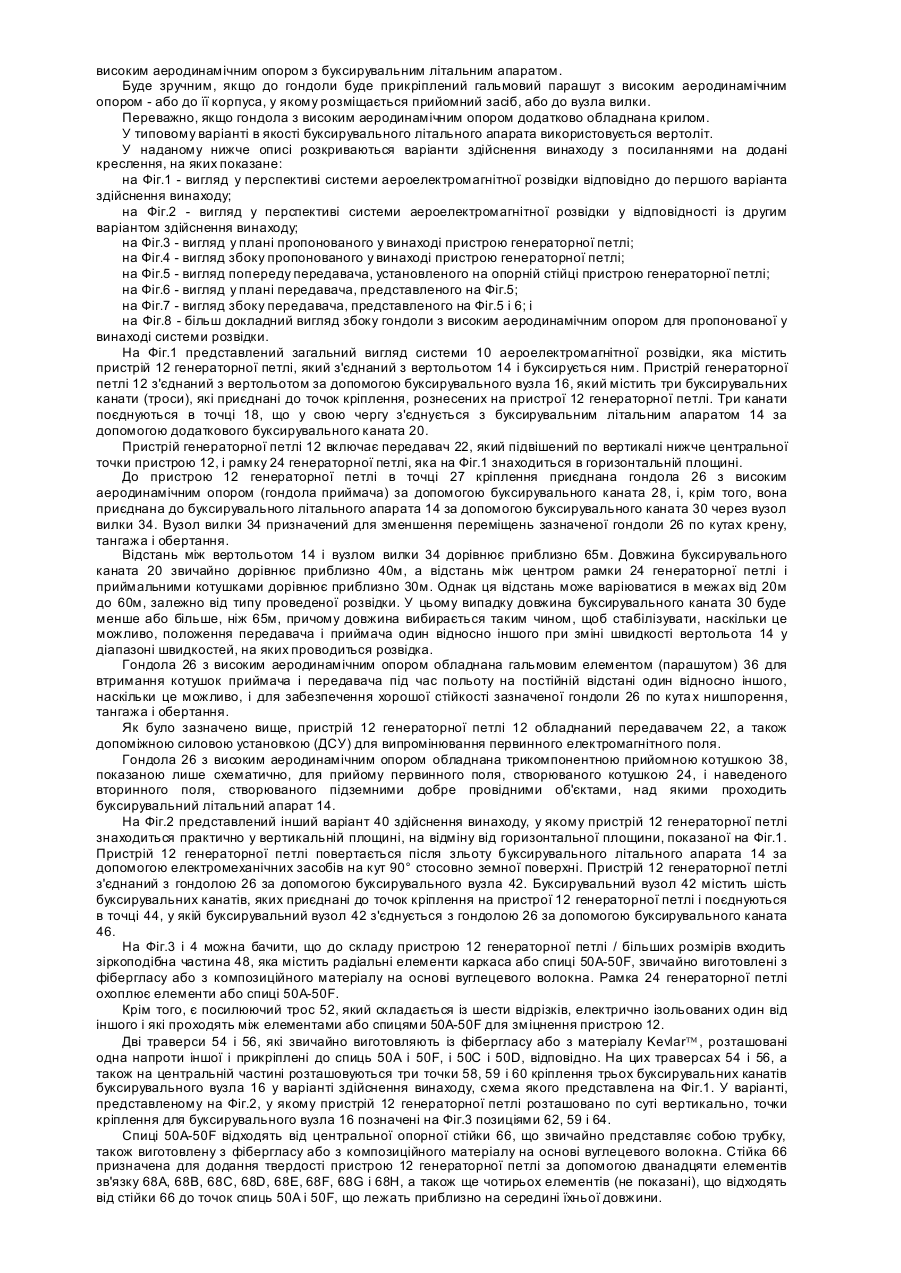
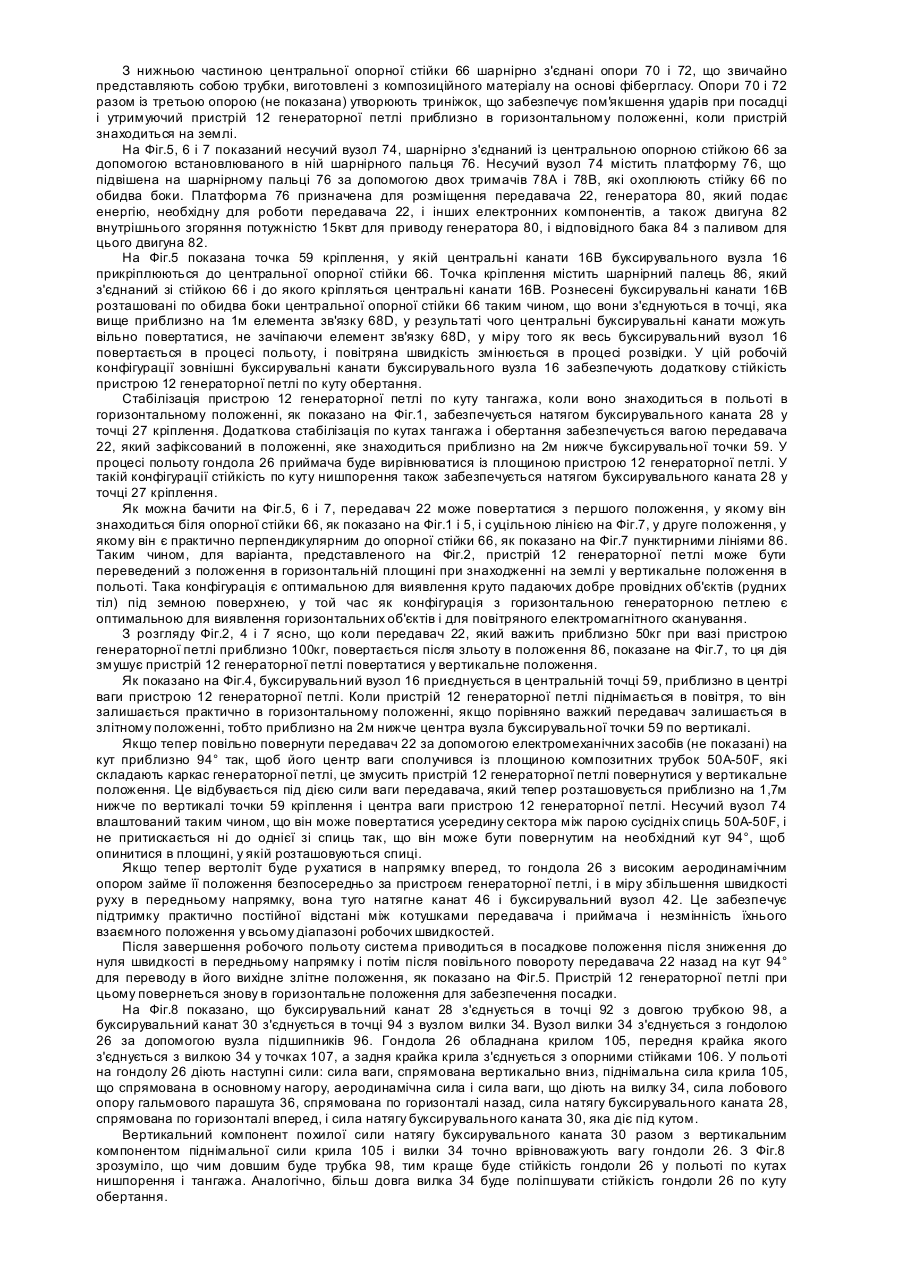
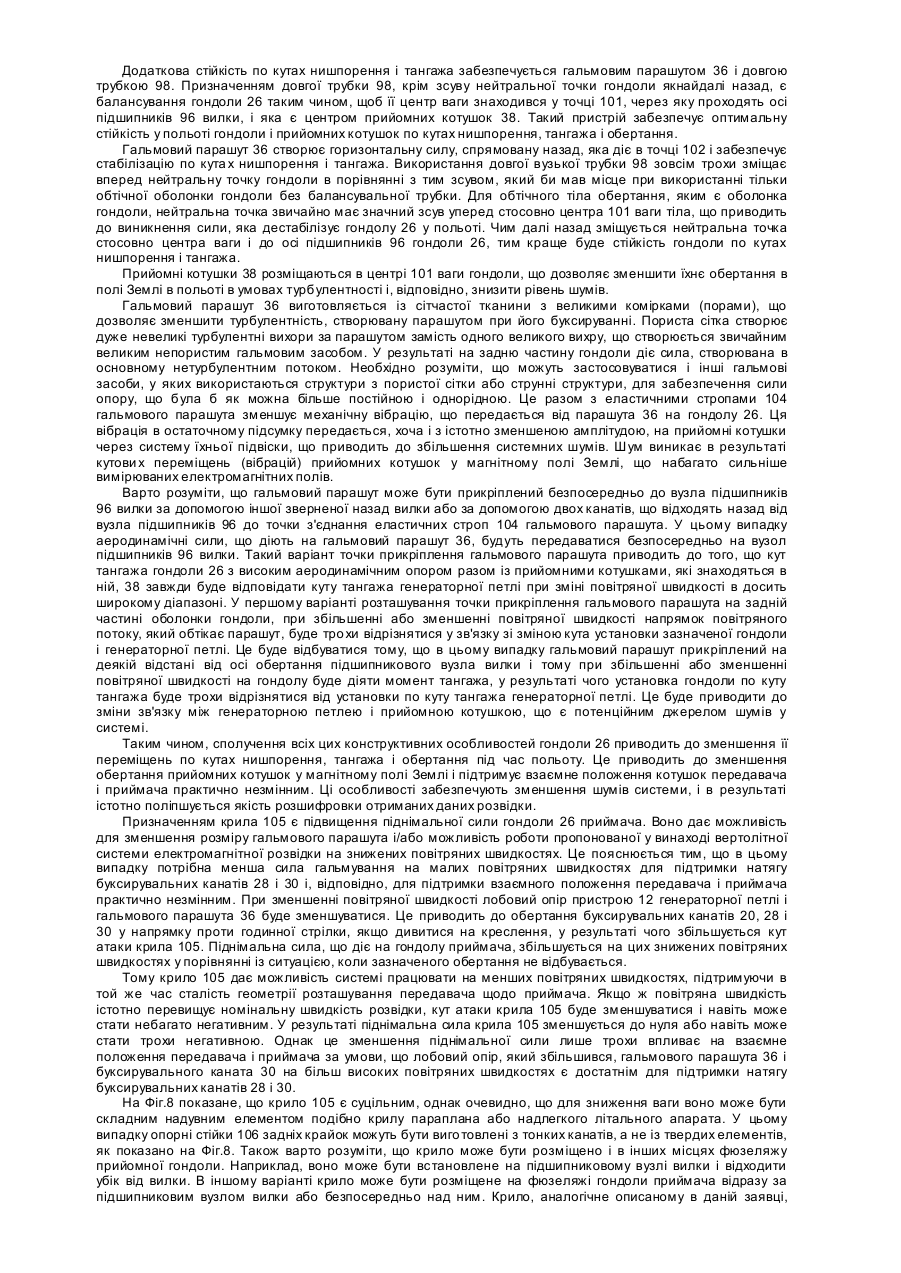
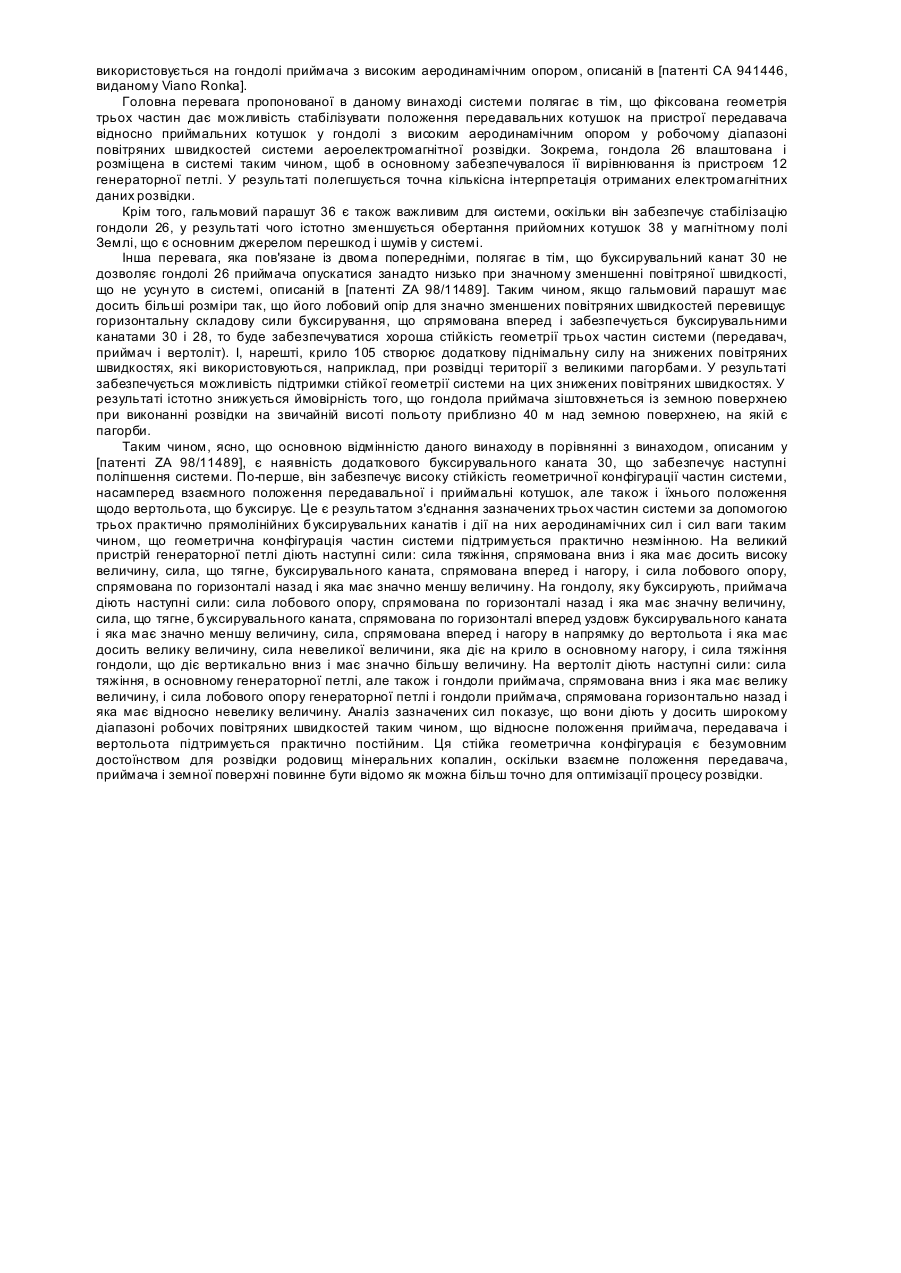
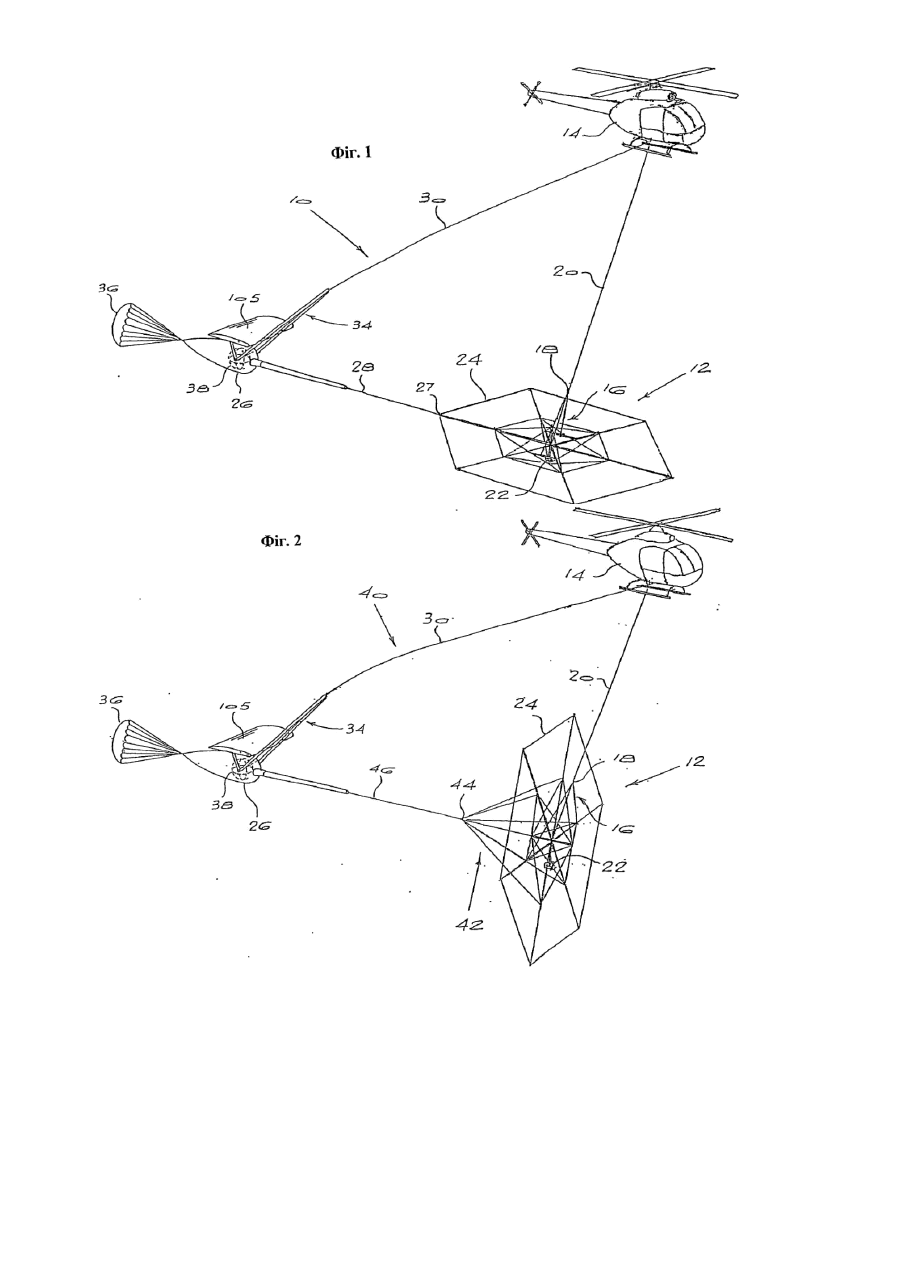
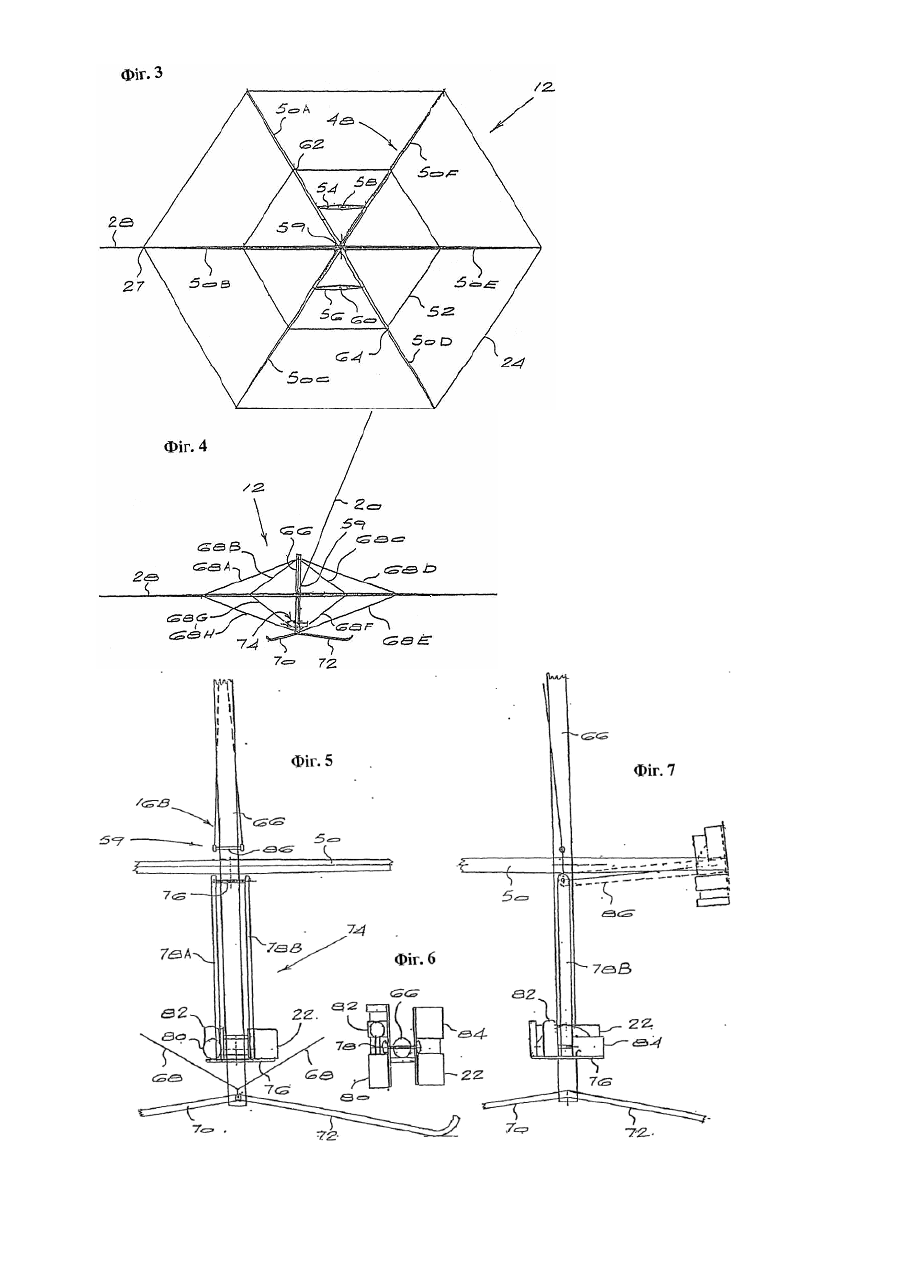
Даний винахід відноситься до систем аероелектромагнітної розвідки (транспортувальними літальними апаратами). Відомі різні системи аероелектромагнітної розвідки, які звичайно використаються для виявлення підземних родовищ мінералів таких, як, наприклад сульфіди, які можуть містити мідь, цинк і нікель у концентраціях, що забезпечують достатню рентабельність видобутку. У [патенті ZA 98/11489] описується, наприклад, система розвідки, яка включає літальний апарат, пристосований для буксирування вертольотом, і гондолу з високим аеродинамічним опором, яку буксирують і яка з'єднана з літальним апаратом і буксирується ним під кутом приблизно 14°. На літальному апараті встановлений передавач (випромінювач), який містить генераторну (збудливу) петлю і необхідну електронну апаратуру для випромінювання первинного електромагнітного поля для розвідки території, над якою пролітає вертоліт. Приймач, який містить трикомпонентну приймальну котушку і необхідну електронну апаратуру, змонтований у гондолі, яку буксирують, і забезпечує прийом і запис поля, яке є результатом взаємодії первинного поля з підстильною поверхнею. Результуюче поле являє собою підсумовування первинного поля передавача із вторинним полем, випромінюваним підземними утвореннями (рудними тілами). Із прийнятого сигналу результуючого поля може бути виділений сигнал, який відноситься до вторинного поля, і його обробка дозволяє зробити виводи відносно природи підземних рудних тіл. Система, описана в [патенті ZA 98/11489], має перевагу в тім, що приймач віддалений на достатню відстань від передавача, у результаті чого компонент первинного поля в результуючому полі істотно послабляється. Добре відомо, що для забезпечення достатньої точності виміру результуючого поля необхідно, щоб положення приймача в гондолі, яку буксирують, яка має високий лобовий опір, щодо передавача в літальному апараті змінювалося якнайменше (в ідеалі залишалося постійним). Однак, оскільки у вищеописаній системі літальний апарат просто буксирує гондолу, яка містить приймач, то відносне положення може значно змінюватися, особливо при змінах швидкості польоту, які спричиняють найбільший негативний вплив на точність такої системи. Наприклад, якщо швидкість польоту зменшується, то лобовий опір гондоли, яку буксирують, також зменшується, і тому вона буде буксирува тися під кутом, який буде більшим, ніж 14°. Це призведе до відповідної зміни амплітуд первинного і вторинного полів на вході приймача, що негативно позначається на точності одержуваних даних. Хоча невеликі зміни первинного поля можуть бути е фективно скомпенсовані електронними засобами або шляхом відповідної обробки сигналу, однак у випадку більших змін виникають проблеми, оскільки прийомна котушка приймача і електронна апаратура повинні мати ідеальну лінійну характеристику для сигналів зі змінною амплітудою, чого на практиці домогтися важко. Значна зміна амплітуди вторинного поля від земної поверхні приводить до неправильної розшифровки даних, оскільки для визначення характеристик добре провідних об'єктів, які знаходяться під земною поверхнею, необхідно знати точне просторове положення передавача, приймача і земної поверхні. Це виходить із законів фізики, які визначають магнітні поля і електромагнітну індукцію. Крім того, якщо падіння повітряної швидкості є значним, то гондола із приймачем може знизитися настільки, що виникає небезпека зіткнення із земною поверхнею, над якою пролітає вертоліт, особливо, якщо літальний апарат буксирується на невеликій висоті. У винаході пропонується система аероелектромагнітної розвідки, яка містить: пристрій генераторної петлі, прикріплений до буксирувального літального апарата з можливістю буксирування цим апаратом; передавальний засіб, який розташовують у пристрої генераторної петлі для генерації первинного електромагнітного поля; гондолу з високим аеродинамічним опором, прикріплену до пристрою генераторної петлі і пристосовану для буксирування цим пристроєм; і прийомний засіб, розміщений у гондолі з високим аеродинамічним опором і призначений для прийому первинного електромагнітного поля і вторинного результуючого електромагнітного поля, яке виникає в результаті взаємодії первинного поля з підземними провідними об'єктами, над якими пролітає буксирувальний літальний апарат, причому гондола з високим аеродинамічним опором також з'єднана з буксирувальним літальним апаратом і пристосована для буксирування цим апаратом так, щоб положення прийомного засобу стосовно передавального засобу залишалося практично постійним. У переважному варіанті здійснення винаходу гондола з високим аеродинамічним опором обладнана гальмовим парашутом для її втримання в основному на одній лінії із пристроєм генераторної петлі. У типовому варіанті пристрій генераторної петлі містить: центральну частину, з якою шарнірно з'єднаний несучий вузол для установки передавального засобу; зіркоподібну частину, яка містить групу спиць, які відходять радіально від центральної частини; і щонайменше одну рамку генераторної петлі, яка охоплює спиці. Буде зручним прикріпити пристрій генераторної петлі до буксирувального літального апарата за допомогою буксирувального вузла, який містить декілька буксирувальних канатів, які прикріплені до рознесених точок кріплення на пристрої генераторної петлі і які сходяться в одному місці, яке з'єднують, у свою чергу, з буксирувальним літальним апаратом за допомогою додаткового буксирувального каната. В одному варіанті здійснення винаходу, при використанні системи пристрій генераторної петлі знаходиться в одній горизонтальній площині з буксирувальним канатом, який проходить між гондолою з високим аеродинамічним опором і периферійною точкою пристрою генераторної петлі. В іншому варіанті здійснення винаходу, при використанні системи пристрій генераторної петлі знаходиться в одній по суті вертикальної площини з буксирувальним вузлом, який з'єднує пристрій генераторної петлі з гондолою з високим аеродинамічним опором. Гондола з високим аеродинамічним опором переважно містить: корпус, у якому розміщається прийомний засіб; твердий наконечник, який відходить від корпуса, для прийому буксирувального каната, який з'єднує гондолу з високим аеродинамічним опором із пристроєм генераторної петлі; і вузол вилки, яка відходить від корпуса, для прийому буксирувального каната, який з'єднує гондолу з високим аеродинамічним опором з буксирувальним літальним апаратом. Буде зручним, якщо до гондоли буде прикріплений гальмовий парашут з високим аеродинамічним опором - або до її корпуса, у якому розміщається прийомний засіб, або до вузла вилки. Переважно, якщо гондола з високим аеродинамічним опором додатково обладнана крилом. У типовому варіанті в якості буксирувального літального апарата використовується вертоліт. У наданому нижче описі розкриваються варіанти здійснення винаходу з посиланнями на додані креслення, на яких показане: на Фіг.1 - вигляд у перспективі системи аероелектромагнітної розвідки відповідно до першого варіанта здійснення винаходу; на Фіг.2 - вигляд у перспективі системи аероелектромагнітної розвідки у відповідності із другим варіантом здійснення винаходу; на Фіг.3 - вигляд у плані пропонованого у винаході пристрою генераторної петлі; на Фіг.4 - вигляд збоку пропонованого у винаході пристрою генераторної петлі; на Фіг.5 - вигляд попереду передавача, установленого на опорній стійці пристрою генераторної петлі; на Фіг.6 - вигляд у плані передавача, представленого на Фіг.5; на Фіг.7 - вигляд збоку передавача, представленого на Фіг.5 і 6; і на Фіг.8 - більш докладний вигляд збоку гондоли з високим аеродинамічним опором для пропонованої у винаході системи розвідки. На Фіг.1 представлений загальний вигляд системи 10 аероелектромагнітної розвідки, яка містить пристрій 12 генераторної петлі, який з'єднаний з вертольотом 14 і буксирується ним. Пристрій генераторної петлі 12 з'єднаний з вертольотом за допомогою буксирувального вузла 16, який містить три буксирувальних канати (троси), які приєднані до точок кріплення, рознесених на пристрої 12 генераторної петлі. Три канати поєднуються в точці 18, що у свою чергу з'єднується з буксирувальним літальним апаратом 14 за допомогою додаткового буксирувального каната 20. Пристрій генераторної петлі 12 включає передавач 22, який підвішений по вертикалі нижче центральної точки пристрою 12, і рамку 24 генераторної петлі, яка на Фіг.1 знаходиться в горизонтальній площині. До пристрою 12 генераторної петлі в точці 27 кріплення приєднана гондола 26 з високим аеродинамічним опором (гондола приймача) за допомогою буксирувального каната 28, і, крім того, вона приєднана до буксирувального літального апарата 14 за допомогою буксирувального каната 30 через вузол вилки 34. Вузол вилки 34 призначений для зменшення переміщень зазначеної гондоли 26 по кутах крену, тангажа і обертання. Відстань між вертольотом 14 і вузлом вилки 34 дорівнює приблизно 65м. Довжина буксирувального каната 20 звичайно дорівнює приблизно 40м, а відстань між центром рамки 24 генераторної петлі і приймальними котушками дорівнює приблизно 30м. Однак ця відстань може варіюватися в межах від 20м до 60м, залежно від типу проведеної розвідки. У цьому випадку довжина буксирувального каната 30 буде менше або більше, ніж 65м, причому довжина вибирається таким чином, щоб стабілізувати, наскільки це можливо, положення передавача і приймача один відносно іншого при зміні швидкості вертольота 14 у діапазоні швидкостей, на яких проводиться розвідка. Гондола 26 з високим аеродинамічним опором обладнана гальмовим елементом (парашутом) 36 для втримання котушок приймача і передавача під час польоту на постійній відстані один відносно іншого, наскільки це можливо, і для забезпечення хорошої стійкості зазначеної гондоли 26 по кута х нишпорення, тангажа і обертання. Як було зазначено вище, пристрій 12 генераторної петлі 12 обладнаний передавачем 22, а також допоміжною силовою установкою (ДСУ) для випромінювання первинного електромагнітного поля. Гондола 26 з високим аеродинамічним опором обладнана трикомпонентною прийомною котушкою 38, показаною лише схематично, для прийому первинного поля, створюваного котушкою 24, і наведеного вторинного поля, створюваного підземними добре провідними об'єктами, над якими проходить буксирувальний літальний апарат 14. На Фіг.2 представлений інший варіант 40 здійснення винаходу, у якому пристрій 12 генераторної петлі знаходиться практично у вертикальній площині, на відміну від горизонтальної площини, показаної на Фіг.1. Пристрій 12 генераторної петлі повертається після зльоту буксирувального літального апарата 14 за допомогою електромеханічних засобів на кут 90° стосовно земної поверхні. Пристрій 12 генераторної петлі з'єднаний з гондолою 26 за допомогою буксирувального вузла 42. Буксирувальний вузол 42 містить шість буксирувальних канатів, яких приєднані до точок кріплення на пристрої 12 генераторної петлі і поєднуються в точці 44, у якій буксирувальний вузол 42 з'єднується з гондолою 26 за допомогою буксирувального каната 46. На Фіг.3 і 4 можна бачити, що до складу пристрою 12 генераторної петлі / більших розмірів входить зіркоподібна частина 48, яка містить радіальні елементи каркаса або спиці 50А-50F, звичайно виготовлені з фібергласу або з композиційного матеріалу на основі вуглецевого волокна. Рамка 24 генераторної петлі охоплює елементи або спиці 50А-50F. Крім того, є посилюючий трос 52, який складається із шести відрізків, електрично ізольованих один від іншого і які проходять між елементами або спицями 50А-50F для зміцнення пристрою 12. Дві траверси 54 і 56, які звичайно виготовляють із фібергласу або з матеріалу KevlarÔ , розташовані одна напроти іншої і прикріплені до спиць 50А і 50F, і 50С і 50D, відповідно. На цих траверсах 54 і 56, а також на центральній частині розташовуються три точки 58, 59 і 60 кріплення трьох буксирувальних канатів буксирувального вузла 16 у варіанті здійснення винаходу, схема якого представлена на Фіг.1. У варіанті, представленому на Фіг.2, у якому пристрій 12 генераторної петлі розташовано по суті вертикально, точки кріплення для буксирувального вузла 16 позначені на Фіг.3 позиціями 62, 59 і 64. Спиці 50А-50F відходять від центральної опорної стійки 66, що звичайно представляє собою трубку, також виготовлену з фібергласу або з композиційного матеріалу на основі вуглецевого волокна. Стійка 66 призначена для додання твердості пристрою 12 генераторної петлі за допомогою дванадцяти елементів зв'язку 68А, 68В, 68С, 68D, 68Е, 68F, 68G і 68Н, а також ще чотирьох елементів (не показані), що відходять від стійки 66 до точок спиць 50А і 50F, що лежать приблизно на середині їхньої довжини. З нижньою частиною центральної опорної стійки 66 шарнірно з'єднані опори 70 і 72, що звичайно представляють собою трубки, виготовлені з композиційного матеріалу на основі фібергласу. Опори 70 і 72 разом із третьою опорою (не показана) утворюють триніжок, що забезпечує пом'якшення ударів при посадці і утримуючий пристрій 12 генераторної петлі приблизно в горизонтальному положенні, коли пристрій знаходиться на землі. На Фіг.5, 6 і 7 показаний несучий вузол 74, шарнірно з'єднаний із центральною опорною стійкою 66 за допомогою встановлюваного в ній шарнірного пальця 76. Несучий вузол 74 містить платформу 76, що підвішена на шарнірному пальці 76 за допомогою двох тримачів 78А і 78В, які охоплюють стійку 66 по обидва боки. Платформа 76 призначена для розміщення передавача 22, генератора 80, який подає енергію, необхідну для роботи передавача 22, і інших електронних компонентів, а також двигуна 82 внутрішнього згоряння потужністю 15квт для приводу генератора 80, і відповідного бака 84 з паливом для цього двигуна 82. На Фіг.5 показана точка 59 кріплення, у якій центральні канати 16В буксирувального вузла 16 прикріплюються до центральної опорної стійки 66. Точка кріплення містить шарнірний палець 86, який з'єднаний зі стійкою 66 і до якого кріпляться центральні канати 16В. Рознесені буксирувальні канати 16В розташовані по обидва боки центральної опорної стійки 66 таким чином, що вони з'єднуються в точці, яка вище приблизно на 1м елемента зв'язку 68D, у результаті чого центральні буксирувальні канати можуть вільно повертатися, не зачіпаючи елемент зв'язку 68D, у міру того як весь буксирувальний вузол 16 повертається в процесі польоту, і повітряна швидкість змінюється в процесі розвідки. У цій робочій конфігурації зовнішні буксирувальні канати буксирувального вузла 16 забезпечують додаткову стійкість пристрою 12 генераторної петлі по куту обертання. Стабілізація пристрою 12 генераторної петлі по куту тангажа, коли воно знаходиться в польоті в горизонтальному положенні, як показано на Фіг.1, забезпечується натягом буксирувального каната 28 у точці 27 кріплення. Додаткова стабілізація по кутах тангажа і обертання забезпечується вагою передавача 22, який зафіксований в положенні, яке знаходиться приблизно на 2м нижче буксирувальної точки 59. У процесі польоту гондола 26 приймача буде вирівнюватися із площиною пристрою 12 генераторної петлі. У такій конфігурації стійкість по куту нишпорення також забезпечується натягом буксирувального каната 28 у точці 27 кріплення. Як можна бачити на Фіг.5, 6 і 7, передавач 22 може повертатися з першого положення, у якому він знаходиться біля опорної стійки 66, як показано на Фіг.1 і 5, і суцільною лінією на Фіг.7, у друге положення, у якому він є практично перпендикулярним до опорної стійки 66, як показано на Фіг.7 пунктирними лініями 86. Таким чином, для варіанта, представленого на Фіг.2, пристрій 12 генераторної петлі може бути переведений з положення в горизонтальній площині при знаходженні на землі у вертикальне положення в польоті. Така конфігурація є оптимальною для виявлення круто падаючих добре провідних об'єктів (рудних тіл) під земною поверхнею, у той час як конфігурація з горизонтальною генераторною петлею є оптимальною для виявлення горизонтальних об'єктів і для повітряного електромагнітного сканування. З розгляду Фіг.2, 4 і 7 ясно, що коли передавач 22, який важить приблизно 50кг при вазі пристрою генераторної петлі приблизно 100кг, повертається після зльоту в положення 86, показане на Фіг.7, то ця дія змушує пристрій 12 генераторної петлі повертатися у вертикальне положення. Як показано на Фіг.4, буксирувальний вузол 16 приєднується в центральній точці 59, приблизно в центрі ваги пристрою 12 генераторної петлі. Коли пристрій 12 генераторної петлі піднімається в повітря, то він залишається практично в горизонтальному положенні, якщо порівняно важкий передавач залишається в злітному положенні, тобто приблизно на 2м нижче центра вузла буксирувальної точки 59 по вертикалі. Якщо тепер повільно повернути передавач 22 за допомогою електромеханічних засобів (не показані) на кут приблизно 94° так, щоб його центр ваги сполучився із площиною композитних трубок 50А-50F, які складають каркас генераторної петлі, це змусить пристрій 12 генераторної петлі повернутися у вертикальне положення. Це відбувається під дією сили ваги передавача, який тепер розташовується приблизно на 1,7м нижче по вертикалі точки 59 кріплення і центра ваги пристрою 12 генераторної петлі. Несучий вузол 74 влаштований таким чином, що він може повертатися усередину сектора між парою сусідніх спиць 50А-50F, і не притискається ні до однієї зі спиць так, що він може бути повернутим на необхідний кут 94°, щоб опинитися в площині, у якій розташовуються спиці. Якщо тепер вертоліт буде р ухатися в напрямку вперед, то гондола 26 з високим аеродинамічним опором займе її положення безпосередньо за пристроєм генераторної петлі, і в міру збільшення швидкості руху в передньому напрямку, вона туго натягне канат 46 і буксирувальний вузол 42. Це забезпечує підтримку практично постійної відстані між котушками передавача і приймача і незмінність їхнього взаємного положення у всьому діапазоні робочих швидкостей. Після завершення робочого польоту система приводиться в посадкове положення після зниження до нуля швидкості в передньому напрямку і потім після повільного повороту передавача 22 назад на кут 94° для переводу в його вихідне злітне положення, як показано на Фіг.5. Пристрій 12 генераторної петлі при цьому повернеться знову в горизонтальне положення для забезпечення посадки. На Фіг.8 показано, що буксирувальний канат 28 з'єднується в точці 92 з довгою трубкою 98, а буксирувальний канат 30 з'єднується в точці 94 з вузлом вилки 34. Вузол вилки 34 з'єднується з гондолою 26 за допомогою вузла підшипників 96. Гондола 26 обладнана крилом 105, передня крайка якого з'єднується з вилкою 34 у точках 107, а задня крайка крила з'єднується з опорними стійками 106. У польоті на гондолу 26 діють наступні сили: сила ваги, спрямована вертикально вниз, піднімальна сила крила 105, що спрямована в основному нагору, аеродинамічна сила і сила ваги, що діють на вилку 34, сила лобового опору гальмового парашута 36, спрямована по горизонталі назад, сила натягу буксирувального каната 28, спрямована по горизонталі вперед, і сила натягу буксирувального каната 30, яка діє під кутом. Вертикальний компонент похилої сили натягу буксирувального каната 30 разом з вертикальним компонентом піднімальної сили крила 105 і вилки 34 точно врівноважують вагу гондоли 26. З Фіг.8 зрозуміло, що чим довшим буде трубка 98, тим краще буде стійкість гондоли 26 у польоті по кутах нишпорення і тангажа. Аналогічно, більш довга вилка 34 буде поліпшувати стійкість гондоли 26 по куту обертання. Додаткова стійкість по кутах нишпорення і тангажа забезпечується гальмовим парашутом 36 і довгою трубкою 98. Призначенням довгої трубки 98, крім зсуву нейтральної точки гондоли якнайдалі назад, є балансування гондоли 26 таким чином, щоб її центр ваги знаходився у точці 101, через яку проходять осі підшипників 96 вилки, і яка є центром прийомних котушок 38. Такий пристрій забезпечує оптимальну стійкість у польоті гондоли і прийомних котушок по кутах нишпорення, тангажа і обертання. Гальмовий парашут 36 створює горизонтальну силу, спрямовану назад, яка діє в точці 102 і забезпечує стабілізацію по кута х нишпорення і тангажа. Використання довгої вузької трубки 98 зовсім трохи зміщає вперед нейтральну точку гондоли в порівнянні з тим зсувом, який би мав місце при використанні тільки обтічної оболонки гондоли без балансувальної трубки. Для обтічного тіла обертання, яким є оболонка гондоли, нейтральна точка звичайно має значний зсув уперед стосовно центра 101 ваги тіла, що приводить до виникнення сили, яка дестабілізує гондолу 26 у польоті. Чим далі назад зміщується нейтральна точка стосовно центра ваги і до осі підшипників 96 гондоли 26, тим краще буде стійкість гондоли по кутах нишпорення і тангажа. Прийомні котушки 38 розміщаються в центрі 101 ваги гондоли, що дозволяє зменшити їхнє обертання в полі Землі в польоті в умовах турбулентності і, відповідно, знизити рівень шумів. Гальмовий парашут 36 виготовляється із сітчастої тканини з великими комірками (порами), що дозволяє зменшити турбулентність, створювану парашутом при його буксируванні. Пориста сітка створює дуже невеликі турбулентні вихори за парашутом замість одного великого вихру, що створюється звичайним великим непористим гальмовим засобом. У результаті на задню частину гондоли діє сила, створювана в основному нетурбулентним потоком. Необхідно розуміти, що можуть застосовуватися і інші гальмові засоби, у яких використаються структури з пористої сітки або струнні структури, для забезпечення сили опору, що була б як можна більше постійною і однорідною. Це разом з еластичними стропами 104 гальмового парашута зменшує механічну вібрацію, що передається від парашута 36 на гондолу 26. Ця вібрація в остаточному підсумку передається, хоча і з істотно зменшеною амплітудою, на прийомні котушки через систему їхньої підвіски, що приводить до збільшення системних шумів. Шум виникає в результаті кутови х переміщень (вібрацій) прийомних котушок у магнітному полі Землі, що набагато сильніше вимірюваних електромагнітних полів. Варто розуміти, що гальмовий парашут може бути прикріплений безпосередньо до вузла підшипників 96 вилки за допомогою іншої зверненої назад вилки або за допомогою двох канатів, що відходять назад від вузла підшипників 96 до точки з'єднання еластичних строп 104 гальмового парашута. У цьому випадку аеродинамічні сили, що діють на гальмовий парашут 36, будуть передаватися безпосередньо на вузол підшипників 96 вилки. Такий варіант точки прикріплення гальмового парашута приводить до того, що кут тангажа гондоли 26 з високим аеродинамічним опором разом із прийомними котушками, які знаходяться в ній, 38 завжди буде відповідати куту тангажа генераторної петлі при зміні повітряної швидкості в досить широкому діапазоні. У першому варіанті розташування точки прикріплення гальмового парашута на задній частині оболонки гондоли, при збільшенні або зменшенні повітряної швидкості напрямок повітряного потоку, який обтікає парашут, буде тро хи відрізнятися у зв'язку зі зміною кута установки зазначеної гондоли і генераторної петлі. Це буде відбуватися тому, що в цьому випадку гальмовий парашут прикріплений на деякій відстані від осі обертання підшипникового вузла вилки і тому при збільшенні або зменшенні повітряної швидкості на гондолу буде діяти момент тангажа, у результаті чого установка гондоли по куту тангажа буде трохи відрізнятися від установки по куту тангажа генераторної петлі. Це буде приводити до зміни зв'язку між генераторною петлею і прийомною котушкою, що є потенційним джерелом шумів у системі. Таким чином, сполучення всіх цих конструктивних особливостей гондоли 26 приводить до зменшення її переміщень по кутах нишпорення, тангажа і обертання під час польоту. Це приводить до зменшення обертання прийомних котушок у магнітному полі Землі і підтримує взаємне положення котушок передавача і приймача практично незмінним. Ці особливості забезпечують зменшення шумів системи, і в результаті істотно поліпшується якість розшифровки отриманих даних розвідки. Призначенням крила 105 є підвищення піднімальної сили гондоли 26 приймача. Воно дає можливість для зменшення розміру гальмового парашута і/або можливість роботи пропонованої у винаході вертолітної системи електромагнітної розвідки на знижених повітряних швидкостях. Це пояснюється тим, що в цьому випадку потрібна менша сила гальмування на малих повітряних швидкостях для підтримки натягу буксирувальних канатів 28 і 30 і, відповідно, для підтримки взаємного положення передавача і приймача практично незмінним. При зменшенні повітряної швидкості лобовий опір пристрою 12 генераторної петлі і гальмового парашута 36 буде зменшуватися. Це приводить до обертання буксирувальних канатів 20, 28 і 30 у напрямку проти годинної стрілки, якщо дивитися на креслення, у результаті чого збільшується кут атаки крила 105. Піднімальна сила, що діє на гондолу приймача, збільшується на цих знижених повітряних швидкостях у порівнянні із ситуацією, коли зазначеного обертання не відбувається. Тому крило 105 дає можливість системі працювати на менших повітряних швидкостях, підтримуючи в той же час сталість геометрії розташування передавача щодо приймача. Якщо ж повітряна швидкість істотно перевищує номінальну швидкість розвідки, кут атаки крила 105 буде зменшуватися і навіть може стати небагато негативним. У результаті піднімальна сила крила 105 зменшується до нуля або навіть може стати трохи негативною. Однак це зменшення піднімальної сили лише трохи впливає на взаємне положення передавача і приймача за умови, що лобовий опір, який збільшився, гальмового парашута 36 і буксирувального каната 30 на більш високих повітряних швидкостях є достатнім для підтримки натягу буксирувальних канатів 28 і 30. На Фіг.8 показане, що крило 105 є суцільним, однак очевидно, що для зниження ваги воно може бути складним надувним елементом подібно крилу параплана або надлегкого літального апарата. У цьому випадку опорні стійки 106 задніх крайок можуть бути виго товлені з тонких канатів, а не із твердих елементів, як показано на Фіг.8. Також варто розуміти, що крило може бути розміщено і в інших місцях фюзеляжу прийомної гондоли. Наприклад, воно може бути встановлене на підшипниковому вузлі вилки і відходити убік від вилки. В іншому варіанті крило може бути розміщене на фюзеляжі гондоли приймача відразу за підшипниковим вузлом вилки або безпосередньо над ним. Крило, аналогічне описаному в даній заявці, використовується на гондолі приймача з високим аеродинамічним опором, описаній в [патенті СА 941446, виданому Viano Ronka]. Головна перевага пропонованої в даному винаході системи полягає в тім, що фіксована геометрія трьох частин дає можливість стабілізувати положення передавальних котушок на пристрої передавача відносно приймальних котушок у гондолі з високим аеродинамічним опором у робочому діапазоні повітряних швидкостей системи аероелектромагнітної розвідки. Зокрема, гондола 26 влаштована і розміщена в системі таким чином, щоб в основному забезпечувалося її вирівнювання із пристроєм 12 генераторної петлі. У результаті полегшується точна кількісна інтерпретація отриманих електромагнітних даних розвідки. Крім того, гальмовий парашут 36 є також важливим для системи, оскільки він забезпечує стабілізацію гондоли 26, у результаті чого істотно зменшується обертання прийомних котушок 38 у магнітному полі Землі, що є основним джерелом перешкод і шумів у системі. Інша перевага, яка пов'язане із двома попередніми, полягає в тім, що буксирувальний канат 30 не дозволяє гондолі 26 приймача опускатися занадто низько при значному зменшенні повітряної швидкості, що не усун уто в системі, описаній в [патенті ZA 98/11489]. Таким чином, якщо гальмовий парашут має досить більші розміри так, що його лобовий опір для значно зменшених повітряних швидкостей перевищує горизонтальну складову сили буксирування, що спрямована вперед і забезпечується буксирувальними канатами 30 і 28, то буде забезпечуватися хороша стійкість геометрії трьох частин системи (передавач, приймач і вертоліт). І, нарешті, крило 105 створює додаткову піднімальну силу на знижених повітряних швидкостях, які використовуються, наприклад, при розвідці території з великими пагорбами. У результаті забезпечується можливість підтримки стійкої геометрії системи на цих знижених повітряних швидкостях. У результаті істотно знижується ймовірність того, що гондола приймача зіштовхнеться із земною поверхнею при виконанні розвідки на звичайній висоті польоту приблизно 40 м над земною поверхнею, на якій є пагорби. Таким чином, ясно, що основною відмінністю даного винаходу в порівнянні з винаходом, описаним у [патенті ZA 98/11489], є наявність додаткового буксирувального каната 30, що забезпечує наступні поліпшення системи. По-перше, він забезпечує високу стійкість геометричної конфігурації частин системи, насамперед взаємного положення передавальної і приймальні котушок, але також і їхнього положення щодо вертольота, що буксирує. Це є результатом з'єднання зазначених трьох частин системи за допомогою трьох практично прямолінійних буксирувальних канатів і дії на них аеродинамічних сил і сил ваги таким чином, що геометрична конфігурація частин системи підтримується практично незмінною. На великий пристрій генераторної петлі діють наступні сили: сила тяжіння, спрямована вниз і яка має досить високу величину, сила, що тягне, буксирувального каната, спрямована вперед і нагору, і сила лобового опору, спрямована по горизонталі назад і яка має значно меншу величину. На гондолу, яку буксирують, приймача діють наступні сили: сила лобового опору, спрямована по горизонталі назад і яка має значну величину, сила, що тягне, буксирувального каната, спрямована по горизонталі вперед уздовж буксирувального каната і яка має значно меншу величину, сила, спрямована вперед і нагору в напрямку до вертольота і яка має досить велику величину, сила невеликої величини, яка діє на крило в основному нагору, і сила тяжіння гондоли, що діє вертикально вниз і має значно більшу величину. На вертоліт діють наступні сили: сила тяжіння, в основному генераторної петлі, але також і гондоли приймача, спрямована вниз і яка має велику величину, і сила лобового опору генераторної петлі і гондоли приймача, спрямована горизонтально назад і яка має відносно невелику величину. Аналіз зазначених сил показує, що вони діють у досить широкому діапазоні робочих повітряних швидкостей таким чином, що відносне положення приймача, передавача і вертольота підтримується практично постійним. Ця стійка геометрична конфігурація є безумовним достоїнством для розвідки родовищ мінеральних копалин, оскільки взаємне положення передавача, приймача і земної поверхні повинне бути відомо як можна більш точно для оптимізації процесу розвідки.
ДивитисяДодаткова інформація
Назва патенту англійськоюHelicopter system of electromagnetic survey
Автори англійськоюKlinkert Philip Samuel
Назва патенту російськоюВертолетная система электромагнитной разведки
Автори російськоюКлинкерт Филип Самюэль
МПК / Мітки
Мітки: електромагнітної, вертолітна, розвідки, система
Код посилання
<a href="https://ua.patents.su/8-83430-vertolitna-sistema-elektromagnitno-rozvidki.html" target="_blank" rel="follow" title="База патентів України">Вертолітна система електромагнітної розвідки</a>
Персональна система розвідки

Номер патенту: 25283
Опубліковано: 10.08.2007
Автори: Капустин Володимир Олександрович, Каневський Валерій Олександрович, Солодовников Володимир Ілліч
МПК: H04B 5/02
Мітки: розвідки, система, персональна
Формула / Реферат:
1. Персональна система розвідки, яка включає засіб випуску балістичного снаряда, що містить телекамеру, зв'язану з радіопередавачем радіоприймачем з екраном для відтворення графічної інформації, енергетичне джерело електроживлення, засоби стабілізації положення балістичного снаряда в польоті по відношенню до поверхні землі, яка відрізняється тим, що як засіб випуску балістичного снаряда застосована ракетниця, а як засіб стабілізації положення...
Процес розвідки та розробки нафтових і газових родовищ
Номер патенту: 5677
Опубліковано: 15.03.2005
Автори: Локтєв Валентин Сергійович, Локтєва Тетяна Миколаївна, Явірський Сергій Фадейович, Черняков Олександр Маркович
МПК: E21C 39/00, E21B 43/00, E21B 43/30
Мітки: розробки, розвідки, газових, процес, нафтових, родовищ
Формула / Реферат:
Процес розвідки та розробки нафтових і газових родовищ, який включає буріння свердловин, дослідження гірського масиву на заданій глибині, побудову структурної карти площі, який відрізняється тим, що за даними досліджень гірського масиву визначають напружено-деформований стан ствола свердловин в залежності від наявності осипів і обвалів, по частоті виникнення яких виділяють частину гірського масиву, потенційно небезпечну з точки зору...
Спосіб розвідки природних покладів метану
Номер патенту: 82961
Опубліковано: 26.05.2008
Автори: Синєбоков Євген Андрійович, Ермаков Іван Федосович
МПК: E21B 43/00, G01V 9/00
Мітки: покладів, спосіб, розвідки, природних, метану
Формула / Реферат:
Спосіб розвідки природних покладів метану, що включає геофізичну розвідку надр з подальшим бурінням розвідувальних свердловин за даними геофізичної розвідки, який відрізняється тим, що заздалегідь проводять структурний і хімічний аналіз карбонатних порід в районах передбачуваного пошуку природних родовищ метану, та у разі їх ідентичності структурному і хімічному складу карбонатних споруд мікробів-метанотрофів, на підставі результатів...
Комплекс радіоелектронної розвідки та радіоелектронної протидії
Номер патенту: 80774
Опубліковано: 25.10.2007
Автори: Коротков Вячеслав Валентинович, Марченко Василь Васильович, Горбулін Володимир Павлович, Немчин Олександр Федорович, Гришко Микола Мефодійович, Рябкін Юрій Вікторович, Яковлев Віталій Васильович
Мітки: розвідки, комплекс, радіоелектронної, протидії
Формула / Реферат:
1. Комплекс радіоелектронної розвідки та радіоелектронної протидії, який містить станцію пункту керування комплексом, станцію багатоцільової радіорозвідки короткохвильового і ультракороткохвильового діапазонів, станції радіозавад короткохвильового та ультракороткохвильового діапазонів, засоби радіозавад яких виконані з діапазоном робочих частот до 150 МГц, станції комплексу виконані мобільними і зв'язані засобами радіозв'язку, який...
Спосіб ведення повітряної розвідки за допомогою безпілотного літального апарата
Номер патенту: 31235
Опубліковано: 25.03.2008
Автори: Слободенюк Сергій Йосипович, Сендецький Микола Миколайович, Васюхина Валентина Олексіївна, Яйчук Микола Семенович, Лапицький Сергій Володимирович, Чучмій Андрій Володимирович, Анпьонов Валентин Вадимович, Гордієвський Олексій Тихонович, Комаров Володимир Олександрович, Василенко Олександр Васильович, Бондарчук Сергій Вікторович, Андрійченко Олег Станіславович, Машталір Вадим Віталійович, Куровська Тетяна Юріївна, Жованик Борис Євгенович
МПК: B64C 31/00, H04B 7/185
Мітки: допомогою, повітряної, ведення, розвідки, літального, безпілотного, спосіб, апарата
Формула / Реферат:
Спосіб ведення повітряної розвідки за допомогою безпілотного літального апарата, при якому підготовляють безпілотний літальний апарат, що містить вбудоване навігаційне устаткування та систему GPS, підготовляють розвідувальне устаткування і розгортають пункт прийому розвідувальної інформації, встановлюють розвідувальне устаткування на безпілотний літальний апарат, проводять зліт безпілотного літального апарата із установленим на ньому...
Попередній патент: Спосіб одержання біогазу
Наступний патент: Спосіб безперервного одержання коксу і пристрій для його здійснення
Випадковий патент: Пристрій для дослідження теплообміну при протіканні хімічних реакцій