Пристрій керування положенням антени радіолокаційної станції комплексної системи захисту корабля
Номер патенту: 83797
Опубліковано: 25.09.2013
Автори: Баранчук Олександр Іванович, Ліпатов Валерій Павлович, Стецюк Володимир Леонтійович, Піронер Ян Михайлович, Долеско Анатолій Олександрович, Гузь Володимир Іванович
Формула / Реферат
Пристрій керування положенням антени радіолокаційної станції комплексної системи захисту корабля, що містить приймально-передавальну антену з електронною апаратурою радіолокаційної станції, які з'єднані високочастотним хвилевідним трактом з багатоканальними обертовим та поворотними зчленуваннями, та приводи повороту та обертання, причому зазначені приводи містять електродвигуни з механічними передачами, редукторами та обмежуючими упорами, який відрізняється тим, що поворот антени по куту крену (бортова хитавиця) здійснюють поворотом антенного посту на кут ±17°, поворот по куту місця (кільова хитавиця) на кут від мінус 10° до +60° та її обертання у горизонтальній площині (азимут або курсовий кут) без обмеження кута здійснюють поворотом та обертанням антени у різних площинах, механізм повороту по куту крену та механізм обертання по азимуту об'єднані у єдиний блок з подвійним підшипником ковзання у вигляді подвійного циліндра з механізмами перетворювання поступального переміщення у обертове у вигляді рейкових пар, причому приводи поворотів та обертання виконані з пасовими передачами та планетарними редукторами, як виконавчі елементи використовують синхронні електродвигуни з постійними магнітами на осях роторів з широтно-імпульсним регулюванням частоти обертання, при тому, що для повороту антени по куту місця (кільова хитавиця) використовують рейкову передачу з пружним елементом - торсіоном для усунення люфту у рейковій передачі, який вмонтовано у бокову обертальну частину корпусу антени, як датчики кутів повороту вихідних осей використовують оптико-електронні датчики кута - енкодери з видачею інформаційного сигналу у цифровому форматі, для забезпечення вільного проходження високочастотного хвилевідного тракту з багатоканальними обертовим та поворотними зчленуваннями осі приводів стабілізації по кутах бортової та кільової хитавиці та обертання по курсовому куту виконано порожнистими, а як зовнішнє джерело інформації використовують сигнали корабельного двоплощинного вимірювача хитавиці.
Текст
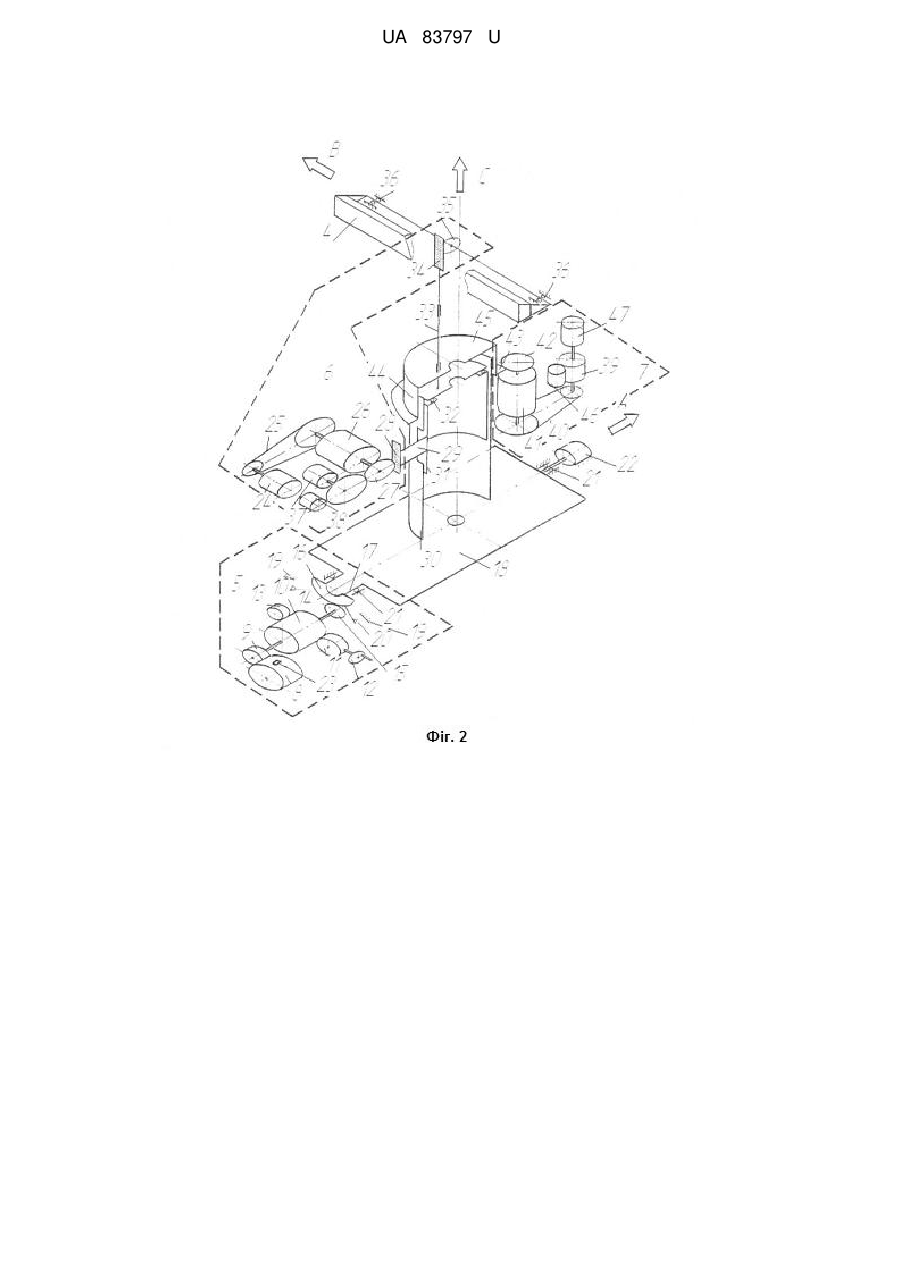
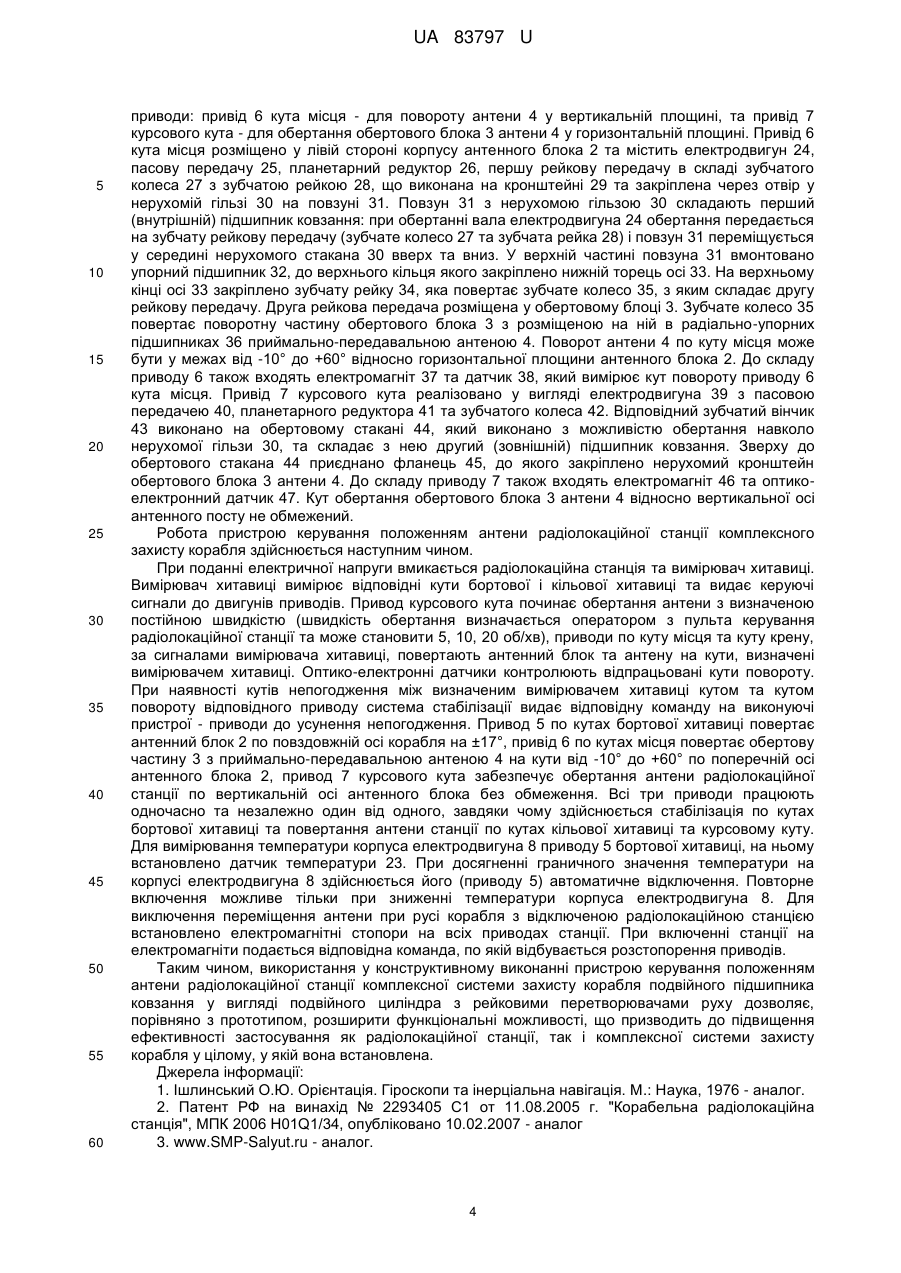
Реферат: Пристрій керування положенням антени радіолокаційної станції комплексної системи захисту корабля містить приймально-передавальну антену з електронною апаратурою радіолокаційної станції, які з'єднані високочастотним хвилевідним трактом з багатоканальними обертовим та поворотними зчленуваннями, та приводи повороту та обертання, причому зазначені приводи містять електродвигуни з механічними передачами, редукторами та обмежуючими упорами. Поворот антени по куту крену (бортова хитавиця) здійснюють поворотом антенного посту на кут ±17°, поворот по куту місця (кільова хитавиця) на кут від мінус 10° до +60° та її обертання у горизонтальній площині (азимут або курсовий кут) без обмеження кута здійснюють поворотом та обертанням антени у різних площинах, механізм повороту по куту крену та механізм обертання по азимуту об'єднані у єдиний блок з подвійним підшипником ковзання у вигляді подвійного циліндра з механізмами перетворювання поступального переміщення у обертове у вигляді рейкових пар, причому приводи поворотів та обертання виконані з пасовими передачами та планетарними редукторами, як виконавчі елементи використовують синхронні електродвигуни з постійними магнітами на осях роторів з широтно-імпульсним регулюванням частоти обертання, при тому, що для повороту антени по куту місця (кільова хитавиця) використовують рейкову передачу з пружним елементом - торсіоном для усунення люфту у рейковій передачі, який вмонтовано у бокову обертальну частину корпусу антени, як датчики кутів повороту вихідних осей використовують оптико-електронні датчики кута - енкодери з видачею інформаційного сигналу у цифровому форматі, для забезпечення вільного проходження високочастотного хвилевідного тракту з багатоканальними обертовим та поворотними зчленуваннями осі приводів стабілізації по кутах бортової та кільової хитавиці та обертання по курсовому куту виконано порожнистими, а як зовнішнє джерело інформації використовують сигнали корабельного двоплощинного вимірювача хитавиці. UA 83797 U (54) ПРИСТРІЙ КЕРУВАННЯ ПОЛОЖЕННЯМ АНТЕНИ РАДІОЛОКАЦІЙНОЇ СТАНЦІЇ КОМПЛЕКСНОЇ СИСТЕМИ ЗАХИСТУ КОРАБЛЯ UA 83797 U UA 83797 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до механізмів обертання та стабілізації антенного блока радіолокаційної станції, яку розміщено на хиткому рухомому об'єкті, наприклад кораблі, та може бути застосована при необхідності стабілізації приладів пошуку, знаходження та супроводження цілей. Широко відомі гіроскопічні прилади стабілізації - гіростабілізовані по трьох координатах платформи, що містять гіроскопічний прилад, який вимірює відхилення від заданого положення та видає команди керування на відповідні виконуючі елементи, наприклад електродвигуни з приводами, розміщені на відповідних осях стабілізованої платформи [1]. Недоліками аналога є, перш за все, наявність окремого від корабельного апаратури автономного гіроскопічного блока, його конструктивна складність та енергоємність гіроскопічного блоку, необхідність застосування додаткових спеціальних методів захисту від метеорологічних факторів (постійна вологість, бризки води тощо), необхідність додаткового обладнання електричного живлення. Гіроскопічні прилади мають перехідний період завеликий, як для вирішення поставлених задач, та працюють у земній системі координат, тому для перетворювання даних по кутах стабілізації у корабельну систему координат до складу апаратури необхідно вводити додаткові перетворювальні блоки. Гіростабілізовані платформи мають, з точки зору поставленої задачі, функціональний недолік - неможливо забезпечити обертання платформи, що стабілізується, у горизонтальній площині. Розміщення електричних двигунів з приводами на відповідних осях стабілізації антени збільшує масо-габаритні характеристики та погіршує динамічні характеристики пристрою у цілому. Таким чином, використання гіростабілізованої платформи для вирішення поставленої задачі є недоцільним. Відомим аналогом є корабельна радіолокаційна станція, що містить приймальнопередавальну антену, багатоканальне обертове зчленування, високочастотний хвилевідний тракт, інше спеціальне обладнання радіолокаційної станції, причому антену закріплено за посередництвом незмінної ферми із стрижнів з шарнірами на кінцях, яка спирається на обертовий корпус антенного посту, редуктор горизонтального обертання разом з електродвигуном розміщені на обертовому корпусі антенного посту, який обкочується навколо погонного зубчастого колеса, розміщеного на нерухомому корпусі, приводи обертання споряджено асинхронними двигунами з частотним регулюванням швидкості розгону та гальмування [2, 3]. Недоліками аналога є перш за все, динамічні характеристики - при обкочуванні антенного посту з антеною, яка має велику вітрильність (розмір антенного полотна приблизно 2 м 3 м), навколо погонного зубчастого колеса виникають великі навантаження на зубчасті пари, в результаті чого збільшується їх знос та зменшується їх строк служби. Тими же причинами обумовлено використання більш потужних асинхронних двигунів з приводами. Ці фактори і зумовлюють підвищення габаритних розмірів, підвищеної загальної маси (до 700 кг) та підвищеного рівня енергоспоживання обертового обладнання, що зменшує надійність радіолокаційної станції у цілому. Найближчим аналогом пристрою який вибрано за прототип, є автомат перекосу гвинта вертольоту, який призначено для зміни напрямку та величини тяги несучого гвинта, тобто передачі повороту горизонтальної площини обертання вертолітного гвинта з нерухомої частини (корпус вертольоту) на рухому (несучу втулку головного редуктора). Напрямок рівнодіючої змінюється шляхом відповідного нахилу площини обертання тарелі автомата перекосу, в результаті чого здійснюється циклічна зміна кутів встановлення лопатей, при якому кут установки кожної лопаті змінюється в залежності від її азимутального положення. Автомат перекосу містить напрямну, повзун, кронштейн, внутрішнє та зовнішнє кільця карданову підвісу, тарелі, тяги повороту лопаті, качалки повздовжнього та поперечного керування, важіль загального кроку та поводок тарелі. Автомат перекосу встановлюється на головному редукторі та закріплюється до його картеру [4]. Недоліками найближчого аналога, який прийнято за прототип, у контексті поставленої задачі, є необхідність відкритого зовнішнього розташування автомату перекосу, що зумовлює необхідні додаткові заходу по захисту від несприятливих метеорологічних умов, його конструктивна складність (велика кількість підшипників та, відповідно, пристроїв для їх змащування), завеликі габаритні розміри автомата та його функціональна недостатність: кути нахилу тарелі автомата перекосу становлять вперед до 8°30' та назад до 7°6' (відносно поперечної осі), вліво до 7°00' та вправо до 6°6' (відносно повздовжньої осі) не задовольняють поставленій задачі (від мінус 10° до +60° відносно поперечної осі - по куту місця або кільовій хитавиці та ±17° відносно повздовжньої осі - по куту крену або бортовій хитавиці). Конструктивне виконання пристрою з такими характеристиками кутів повороту потребує встановлення додаткового обладнання, електродвигунів з приводами, збільшення довжини тяг, 1 UA 83797 U 5 10 15 20 25 30 35 40 45 50 55 60 що збільшує як габаритні, так і масові характеристики пристрою. Крім того, конструкція автомата перекосу призначена для її використання у ручному режимі та є менш швидкодіючою, тоді як поставлена задача передбачає керування стабілізованою платформою у автоматичному режимі. В основу корисної моделі поставлена задача розробити компактний пристрій автоматичного керування положенням антени радіолокаційної станції за сигналами корабельного вимірювача хитавиці по кутах бортової та кільової хитавиці (кута крену та кута місця) з одночасним обертанням антени у горизонтальній площині (по куту азимута або курсовому куту) із зміною конструктивного виконання приводів повороту антени шляхом використання подвійного підшипника ковзання, розширення функціональних можливостей пристрою з доведенням кутів повороту антенного блоку до ±17° по куту крену (бортова хитавиця) та повороту антени від мінус 10° до +60° по куту місця (кільова хитавиця), забезпечивши обертання антени у горизонтальній площині з вільним проходженням високочастотного хвилевідного тракту з багатоканальними обертовими зчленуваннями від апаратури радіолокаційної станції до її антени. Поставлена задача вирішується тим, щодо конструкції найближчого аналога, який визнано за прототип, внесені суттєві схемно-технічні та конструктивні зміни: - основу антени нерухомо закріплено на поворотній частині антенного блока з можливістю повороту антени на відповідні кути кільової хитавиці (кути місця) та вільного обертання з необхідною швидкістю по курсовому куту (кути азимуту), а повороти антенного блока на кути бортової хитавиці (кути крену) здійснюються поворотом всього антенного блока відносно нерухомого (відносно антенного блока) місця його установки; - замість карданового підвісу тарелі перекосу з тягами, кронштейнами та качалками використовується подвійний підшипник ковзання з механізмами перетворювання поступального переміщення у обертове у вигляді рейкових пар; - як виконавчі елементи використовують синхронні електродвигуни з постійними магнітами на осі ротора з широтно-імпульсним регулюванням частоти обертання; - для зменшення частоти обертання електродвигунів використовують пасові передачі з планетарними редукторами; - для усунення люфту у рейковій передачі повороту антени станції по кутах кільової хитавиці (кути місця) використовують пружний елемент - торсіон з додатковим зубчастим колесом; - як датчики кутів повороту вихідних осей приводів з метою підвищення точності, надійності та забезпечення можливості видачі інформації у цифровому форматі використовують оптикоелектронні датчики кута - енкодери; - для забезпечення вільного проходження високочастотного хвилевідного тракту з багатоканальними обертовим та поворотними зчленуваннями осі приводів стабілізації по кутах бортової та кільової хитавиці та обертання по курсовому куту виконано порожнистими; - як зовнішнє джерело інформації для керування положенням антени по кутах бортової та кільової хитавиці використовують інформаційні сигнали корабельного вимірювача хитавиці. Суттю корисної моделі є те, що у пристрої керування положенням антени радіолокаційної станції комплексної системи захисту корабля, що містить приймально-передавальну антену з електронною апаратурою радіолокаційної станції, які з'єднані високочастотним хвилевідним трактом з багатоканальними обертовим та поворотними зчленуваннями, та приводи повороту та обертання, причому зазначені приводи містять електродвигуни з механічними передачами, редукторами та обмежуючими упорами, новим є те, що поворот антени по куту крену (бортова хитавиця) здійснюють поворотом антенного посту на кут ±17°, поворот по куту місця (кільова хитавиця) на кут від мінус 10° до +60° та її обертання у горизонтальній площині (азимут або курсовий кут) без обмеження кута здійснюють поворотом та обертанням антени у різних площинах, механізм повороту по куту крену та механізм обертання по азимуту об'єднані у єдиний блок з подвійним підшипником ковзання у вигляді подвійного циліндра з механізмами перетворювання поступального переміщення у обертове у вигляді рейкових пар, причому приводи поворотів та обертання виконані з пасовими передачами та планетарними редукторами, як виконавчі елементи використовують синхронні електродвигуни з постійними магнітами на осях роторів з широтно-імпульсним регулюванням частоти обертання, при тому, що для повороту антени по куту місця (кільова хитавиця) використовують рейкову передачу з пружним елементом - торсіоном для усунення люфту у рейковій передачі, який вмонтовано у бокову обертальну частину корпусу антени, як датчики кутів повороту вихідних осей використовують оптико-електронні датчики кута - енкодери з видачею інформаційного сигналу у цифровому форматі, для забезпечення вільного проходження високочастотного хвилевідного тракту з багатоканальними обертовим та поворотними зчленуваннями осі приводів стабілізації 2 UA 83797 U 5 10 15 20 25 30 35 40 45 50 55 60 по кутах бортової та кільової хитавиці та обертання по курсовому куту виконано порожнистими, а як зовнішнє джерело інформації використовують сигнали корабельного двоплощинного вимірювача хитавиці. Порівняльний аналіз технічного рішення, що пропонується, з прототипом дозволяє зробити висновок, що пристрій керування положенням антени радіолокаційної станції комплексної системи захисту корабля, повністю відповідає критеріям винаходу, є більш надійним та має розширені функціональні можливості: розширення діапазонів кутів повороту антенного блока до ±17° по куту крену (бортова хитавиця) та повороту антени від мінус 10° до +60° по куту місця (кільова хитавиця), забезпечивши обертання антени у горизонтальній площині з вільним проходженням високочастотного хвилевідного тракту з багатоканальними обертовими зчленуваннями від апаратури радіолокаційної станції до її антени, із забезпеченням можливості керування пристроєм у автоматичному режимі за сигналами корабельного вимірювача хитавиці. Пристрій керування положенням антени радіолокаційної станції комплексної системи захисту корабля є складним багатоланковим механізмом для перетворювання обертання валів електродвигунів у качання антени у вертикальних (повздовжній - по куту крену або бортовій хитавиці та поперечній - по куту місця або кільовій хитавиці) площинах з одночасним обертанням антени з визначеною швидкістю у горизонтальній площині (по куту азимуту або курсовому куту). Діапазон повороту по крену досягає ±17°, діапазон повороту антени по куту місця може бути від мінус 10° до +60° у вертикальних (повздовжній та поперечних площинах), кут обертання антени у горизонтальній площині (курсовий кут або азимут) не обмежений. Керування положенням антени відбувається за сигналами блока керування антенним постом, які визначаються корабельним двоплощинним вимірювачем хитавиці, пультом керування командира радіолокаційної станції та контролюються оптико-електронними датчиками енкодерами, які встановлені на вихідних осях відповідних приводів пристрою. Суть корисної моделі пояснюється кресленнями, на яких, як приклад конструктивного виконання, показано: на Фіг. 1 - зовнішній вигляд антенного посту з приймально-передавальною радіолокаційною антеною; на Фіг. 2 - кінематичну схему пристрою керування положенням антени. На зовнішньому вигляді антенного посту радіолокаційної станції (Фіг. 1), у якому зосереджені всі три приводи керування положенням антени, цифрами позначені блок приводів 1, антенний блок 2, обертовий блок 3 з приймально-передавальною антеною 4. Антенний пост є тривісним підвісом з віссю стабілізації по кутах крену (бортової хитавиці) та з осями обертання по курсовому куту (азимуту) та качання по куту місця (кільова хитавиця). Стабілізація положення антени по крену відбувається у діапазоні ±17°, діапазон качання антени по куту місця може бути від мінус 10° до +60°, кут обертання антени по курсовому куту (азимуту) не обмежений. Антенний пост розміщується у місці, яке забезпечує незатінений круговий огляд у горизонтальній та вертикальній площинах відносно горизонту з урахуванням кутів бортової та кільової хитавиць. На кінематичній схемі пристрою керування положенням антени (Фіг. 2) цифрами позначені привід 5 (по куту крену або бортовій хитавиці), привід 6 (по куту місця або кільової хитавиці), привід 7 обертання антени (по азимуту або курсовому куту). Привід 5 розміщено у нерухомому блоці 1 приводів, приводи 6 та 7 - у середині антенного блока 2, який виконано з можливістю поворотів навколо повздовжньої осі корабля, причому рейкова передача приводу 6 розміщена у обертовому блоці 3 антени 4. Обертовий блок 3 антени 4 виконано з можливістю його обертання навколо своєї вертикальної осі та повороту на визначені кути навколо поперечної осі корабля. Вихідні осі всіх приводів - приводу 5 кута бортової хитавиці (вісь А), приводу 6 кута кільової хитавиці (вісь В), приводу 7 обертання антени по курсовому куту (вісь С), виконані взаємноортогональними. Таким чином, радіолокаційна антена 4 станції стабілізується у просторі по кутам бортової та кільової хитавиці з одночасним обертанням її по курсовому куту. Привід 5 розміщують у внутрішній порожнині блока привода 1. Привід 5 містить електродвигун 8 із запобіжною муфтою 9, редуктор 10, який виконано з можливістю його дублювання ручним приводом 11 за допомогою рукояті 12 при спрацюванні електромагніту 13. На вихідному валу 14 розміщено зубчате колесо 15, яке знаходиться у зчепленні з зубчатим сектором 16, який закріплено на порожнистій півосі 17 люльки 18 антенного блока 2. Обмеження повороту люльки 18 відносно корпуса блока привода 1 досягається механічними упорами 19, які обмежують кут повороту люльки 18 (не більше ±22°) та мікровимикачами 20, які обмежують кути повороту у межах ±17°. Люлька 18 встановлена на радіально-упорних підшипниках 21, з другої сторони люльки 18 у другій півосі розміщено оптико-електронний датчик 22. Блок приводу 1 оснащено датчиком температури 23, який розміщено у середині приводу 5 (на Фіг. не позначено). Антенний блок 2 встановлюється на люльку 18. У корпусі антенного блока 2 зібрано два 3 UA 83797 U 5 10 15 20 25 30 35 40 45 50 55 60 приводи: привід 6 кута місця - для повороту антени 4 у вертикальній площині, та привід 7 курсового кута - для обертання обертового блока 3 антени 4 у горизонтальній площині. Привід 6 кута місця розміщено у лівій стороні корпусу антенного блока 2 та містить електродвигун 24, пасову передачу 25, планетарний редуктор 26, першу рейкову передачу в складі зубчатого колеса 27 з зубчатою рейкою 28, що виконана на кронштейні 29 та закріплена через отвір у нерухомій гільзі 30 на повзуні 31. Повзун 31 з нерухомою гільзою 30 складають перший (внутрішній) підшипник ковзання: при обертанні вала електродвигуна 24 обертання передається на зубчату рейкову передачу (зубчате колесо 27 та зубчата рейка 28) і повзун 31 переміщується у середині нерухомого стакана 30 вверх та вниз. У верхній частині повзуна 31 вмонтовано упорний підшипник 32, до верхнього кільця якого закріплено нижній торець осі 33. На верхньому кінці осі 33 закріплено зубчату рейку 34, яка повертає зубчате колесо 35, з яким складає другу рейкову передачу. Друга рейкова передача розміщена у обертовому блоці 3. Зубчате колесо 35 повертає поворотну частину обертового блока 3 з розміщеною на ній в радіально-упорних підшипниках 36 приймально-передавальною антеною 4. Поворот антени 4 по куту місця може бути у межах від -10° до +60° відносно горизонтальної площини антенного блока 2. До складу приводу 6 також входять електромагніт 37 та датчик 38, який вимірює кут повороту приводу 6 кута місця. Привід 7 курсового кута реалізовано у вигляді електродвигуна 39 з пасовою передачею 40, планетарного редуктора 41 та зубчатого колеса 42. Відповідний зубчатий вінчик 43 виконано на обертовому стакані 44, який виконано з можливістю обертання навколо нерухомої гільзи 30, та складає з нею другий (зовнішній) підшипник ковзання. Зверху до обертового стакана 44 приєднано фланець 45, до якого закріплено нерухомий кронштейн обертового блока 3 антени 4. До складу приводу 7 також входять електромагніт 46 та оптикоелектронний датчик 47. Кут обертання обертового блока 3 антени 4 відносно вертикальної осі антенного посту не обмежений. Робота пристрою керування положенням антени радіолокаційної станції комплексного захисту корабля здійснюється наступним чином. При поданні електричної напруги вмикається радіолокаційна станція та вимірювач хитавиці. Вимірювач хитавиці вимірює відповідні кути бортової і кільової хитавиці та видає керуючі сигнали до двигунів приводів. Привод курсового кута починає обертання антени з визначеною постійною швидкістю (швидкість обертання визначається оператором з пульта керування радіолокаційної станції та може становити 5, 10, 20 об/хв), приводи по куту місця та куту крену, за сигналами вимірювача хитавиці, повертають антенний блок та антену на кути, визначені вимірювачем хитавиці. Оптико-електронні датчики контролюють відпрацьовані кути повороту. При наявності кутів непогодження між визначеним вимірювачем хитавиці кутом та кутом повороту відповідного приводу система стабілізації видає відповідну команду на виконуючі пристрої - приводи до усунення непогодження. Привод 5 по кутах бортової хитавиці повертає антенний блок 2 по повздовжній осі корабля на ±17°, привід 6 по кутах місця повертає обертову частину 3 з приймально-передавальною антеною 4 на кути від -10° до +60° по поперечній осі антенного блока 2, привод 7 курсового кута забезпечує обертання антени радіолокаційної станції по вертикальній осі антенного блока без обмеження. Всі три приводи працюють одночасно та незалежно один від одного, завдяки чому здійснюється стабілізація по кутах бортової хитавиці та повертання антени станції по кутах кільової хитавиці та курсовому куту. Для вимірювання температури корпуса електродвигуна 8 приводу 5 бортової хитавиці, на ньому встановлено датчик температури 23. При досягненні граничного значення температури на корпусі електродвигуна 8 здійснюється його (приводу 5) автоматичне відключення. Повторне включення можливе тільки при зниженні температури корпуса електродвигуна 8. Для виключення переміщення антени при русі корабля з відключеною радіолокаційною станцією встановлено електромагнітні стопори на всіх приводах станції. При включенні станції на електромагніти подається відповідна команда, по якій відбувається розстопорення приводів. Таким чином, використання у конструктивному виконанні пристрою керування положенням антени радіолокаційної станції комплексної системи захисту корабля подвійного підшипника ковзання у вигляді подвійного циліндра з рейковими перетворювачами руху дозволяє, порівняно з прототипом, розширити функціональні можливості, що призводить до підвищення ефективності застосування як радіолокаційної станції, так і комплексної системи захисту корабля у цілому, у якій вона встановлена. Джерела інформації: 1. Ішлинський О.Ю. Орієнтація. Гіроскопи та інерціальна навігація. М.: Наука, 1976 - аналог. 2. Патент РФ на винахід № 2293405 С1 от 11.08.2005 г. "Корабельна радіолокаційна станція", МПК 2006 H01Q1/34, опубліковано 10.02.2007 - аналог 3. www.SMP-Salyut.ru - аналог. 4 UA 83797 U 4. Данилов В.А., Вертоліт МІ-8: будова та технічне обслуговування, М., Транспорт, 1988, 278 стор. - прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 Пристрій керування положенням антени радіолокаційної станції комплексної системи захисту корабля, що містить приймально-передавальну антену з електронною апаратурою радіолокаційної станції, які з'єднані високочастотним хвилевідним трактом з багатоканальними обертовим та поворотними зчленуваннями, та приводи повороту та обертання, причому зазначені приводи містять електродвигуни з механічними передачами, редукторами та обмежуючими упорами, який відрізняється тим, що поворот антени по куту крену (бортова хитавиця) здійснюють поворотом антенного посту на кут ±17°, поворот по куту місця (кільова хитавиця) на кут від мінус 10° до +60° та її обертання у горизонтальній площині (азимут або курсовий кут) без обмеження кута здійснюють поворотом та обертанням антени у різних площинах, механізм повороту по куту крену та механізм обертання по азимуту об'єднані у єдиний блок з подвійним підшипником ковзання у вигляді подвійного циліндра з механізмами перетворювання поступального переміщення у обертове у вигляді рейкових пар, причому приводи поворотів та обертання виконані з пасовими передачами та планетарними редукторами, як виконавчі елементи використовують синхронні електродвигуни з постійними магнітами на осях роторів з широтно-імпульсним регулюванням частоти обертання, при тому, що для повороту антени по куту місця (кільова хитавиця) використовують рейкову передачу з пружним елементом - торсіоном для усунення люфту у рейковій передачі, який вмонтовано у бокову обертальну частину корпусу антени, як датчики кутів повороту вихідних осей використовують оптико-електронні датчики кута - енкодери з видачею інформаційного сигналу у цифровому форматі, для забезпечення вільного проходження високочастотного хвилевідного тракту з багатоканальними обертовим та поворотними зчленуваннями осі приводів стабілізації по кутах бортової та кільової хитавиці та обертання по курсовому куту виконано порожнистими, а як зовнішнє джерело інформації використовують сигнали корабельного двоплощинного вимірювача хитавиці. 5 UA 83797 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюHuz Volodymyr Ivanovych, Lipatov Valerii Pavlovych, Baranchuk Oleksandr Ivanovych
Автори російськоюГузь Владимир Иванович, Липатов Валерий Павлович, Баранчук Александр Иванович
МПК / Мітки
МПК: H01Q 1/34
Мітки: системі, антени, керування, радіолокаційної, корабля, комплексної, пристрій, станції, захисту, положенням
Код посилання
<a href="https://ua.patents.su/8-83797-pristrijj-keruvannya-polozhennyam-anteni-radiolokacijjno-stanci-kompleksno-sistemi-zakhistu-korablya.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування положенням антени радіолокаційної станції комплексної системи захисту корабля</a>
Радіолокаційна станція комплексної системи захисту корабля
Номер патенту: 83795
Опубліковано: 25.09.2013
Автори: Гузь Володимир Іванович, Ліпатов Валерій Павлович, Піронер Ян Михайлович, Стецюк Володимир Леонтійович, Долеско Анатолій Олександрович
МПК: G01S 13/04
Мітки: корабля, станція, комплексної, системі, захисту, радіолокаційна
Формула / Реферат:
Радіолокаційна станція комплексної системи захисту корабля, що містить антенний пост з антеною, пульт оператора та розподільний щит, при цьому до складу антенного поста входять антенна система, передавач, надвисокочастотний приймач, підсилювач проміжної частоти та модуль процесорів, до складу пульта оператора входять панельний комп'ютер пульта оператора, що містить з'єднані між собою монітор пульта оператора РЛС та процесор керування і...
Перетворювач аналогового сигналу радіолокаційної станції в цифровий
Номер патенту: 672
Опубліковано: 16.10.2000
Автори: Пілюгін Сергій Вікторович, Садовий Ігор Леонідович, Кравченко Олександр Іванович
МПК: G06F 5/06, G06F 3/05, H03M 1/12, G06F 1/04, G06F 1/16, H05K 1/02
Мітки: сигналу, станції, цифровий, перетворювач, аналогового, радіолокаційної
Формула / Реферат:
1. Перетворювач аналогового сигналу радіолокаційної станції в цифровий, який включає процесорний блок та вузол нормалізації сигналу, який відрізняється тим, що вузол нормалізації сигналів від двох радіолокаційних станцій одного поста виконано в вигляді п'яти друкованих плат таким чином, що перша друкована плата призначена для нормалізації сигналів кута повороту антени радіолокаційної станції і має три входи та один вихід, друга друкована...
Система керування функціональними режимами радіолокаційної станції
Номер патенту: 30978
Опубліковано: 25.03.2008
Автори: Шматков Сергій Ігорович, Челпанов Артем Володимирович, Вовк Олександр Іванович, Карлов Володимир Дмитрович
МПК: G01S 13/52
Мітки: радіолокаційної, система, станції, функціональними, режимами, керування
Формула / Реферат:
Система керування функціональними режимами радіолокаційної станції (РЛС), що містить вузол обробки інформації, вузол керування ресурсами РЛС та вузол керування режимом супроводу у складі послідовно включених блока класифікації, блока розподілу заявок на супровід цілей і блока оцінки потрібної енергії, яка відрізняється тим, що додатково введені: послідовно з'єднані блок оцінки інтенсивності потоку цілей і блок групування цілей, послідовно...
Спосіб захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад
Номер патенту: 59472
Опубліковано: 10.05.2011
Автори: Залевський Олексій Павлович, Піза Дмитро Макарович, Рудик Олександр Володимирович
МПК: G01S 7/36, H04B 15/00
Мітки: когерентно-імпульсної, завад, станції, комбінованих, спосіб, радіолокаційної, захисту
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагових коефіцієнтів поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та...
Пристрій для регулювання і перевірки блока опромінювачів дзеркальної антени станції радіотехнічного контролю
Номер патенту: 5953
Опубліковано: 15.03.2005
Автори: Сергієнко В'ячеслав Петрович, Білонога Володимир Петрович, Казьміщев Олександр Васильович, Кураков Валерій Олександрович, Демченко Василь Дмитрович, Долгіх Віктор Тимофійович, Шмигирьов Олександр Сергійович, Щербак Валентин Павлович, ЛОШАК ВІТАЛІЙ ВАСИЛЬОВИЧ, Грушевенко Ірина Миколаївна, Володіна Світлана Львівна
МПК: G01R 29/10
Мітки: регулювання, антени, опромінювачів, блока, радіотехнічного, перевірки, дзеркальної, станції, контролю, пристрій
Формула / Реферат:
1. Пристрій для регулювання і перевірки блока опромінювачів дзеркальної антени станції радіотехнічного контролю, що містить генератор ВЧ сигналів, вихід якого підключений до входу допоміжної антени, блок опромінювачів, що перевіряється, установлений на поворотному пристрої, еталонну антену, підключену до аналізатора спектра частоти, вимірювач комплексних коефіцієнтів передач, який відрізняється тим, що в пристрій додатково введений стенд...
Попередній патент: Панорамний оптико-телевізійний прилад
Наступний патент: Гвинтовий двошнековий змішувач
Випадковий патент: Кокільна машина для відливання молольних тіл