Спосіб дистанційного керування охоронною системою транспортних засобів та охоронна система транспортних засобів
Формула / Реферат
1. Спосіб керування охоронною системою транспортного засобу, при якому команди на керування охоронною системою подають із дистанційного задавального пристрою, який відрізняється тим, що дистанційний задавальний пристрій, при двосторонньому зв'язку з охоронною системою, отримує квитанцію про виконання прийнятої команди, якщо дистанційний задавальний пристрій, в межах установленого часу, не отримав від охоронної системи квитанцію або якщо квитанція не відповідає переданій команді, то дистанційний задавальний пристрій здійснює автоматично повторні передавання заданої команди, а кількість автоматичних повторних передавань команди установлюють за допомогою лічильника повторень команди або обмежують заданим інтервалом повторень, крім того, подають сигнали про дію завади в каналі зв'язку дистанційного задавального пристрою та охоронної системи, якщо в межах установленої кількості або заданого інтервалу повторень квитанція відсутня або прийнята квитанція не відповідає переданій команді.
2. Спосіб за п. 1, який відрізняється тим, що команди задають шляхом N-кратної дії на один або декілька органів керування дистанційного задавального пристрою, а сформовану по сигналах від органів керування команду передають охоронній системі після задання команди і дозволяючої дії на органи керування.
3. Спосіб за п. 1 або 2, який відрізняється тим, що на час автоматичного повторного передавання органи керування дистанційного задавального пристрою блокують.
4. Охоронна система транспортного засобу, до складу якої входить дистанційний задавальний пристрій, з'єднаний із пристроєм керування, що установлений на транспортному засобі і до якого підключені датчики стану транспортного засобу, виконавчі пристрої та сигнальний пристрій, яка відрізняється тим, що дистанційний задавальний пристрій виконаний з можливістю автоматичного повторного передавання заданої команди та до його складу входять орган керування та засіб оповіщення, підключені до блока перетворення сигналів, до складу якого входить лічильник та/або таймер автоматичних повторень, причому лічильник та таймер з'єднані з лінією підключення блока перетворення сигналів до приймально-передавального блока.
Текст
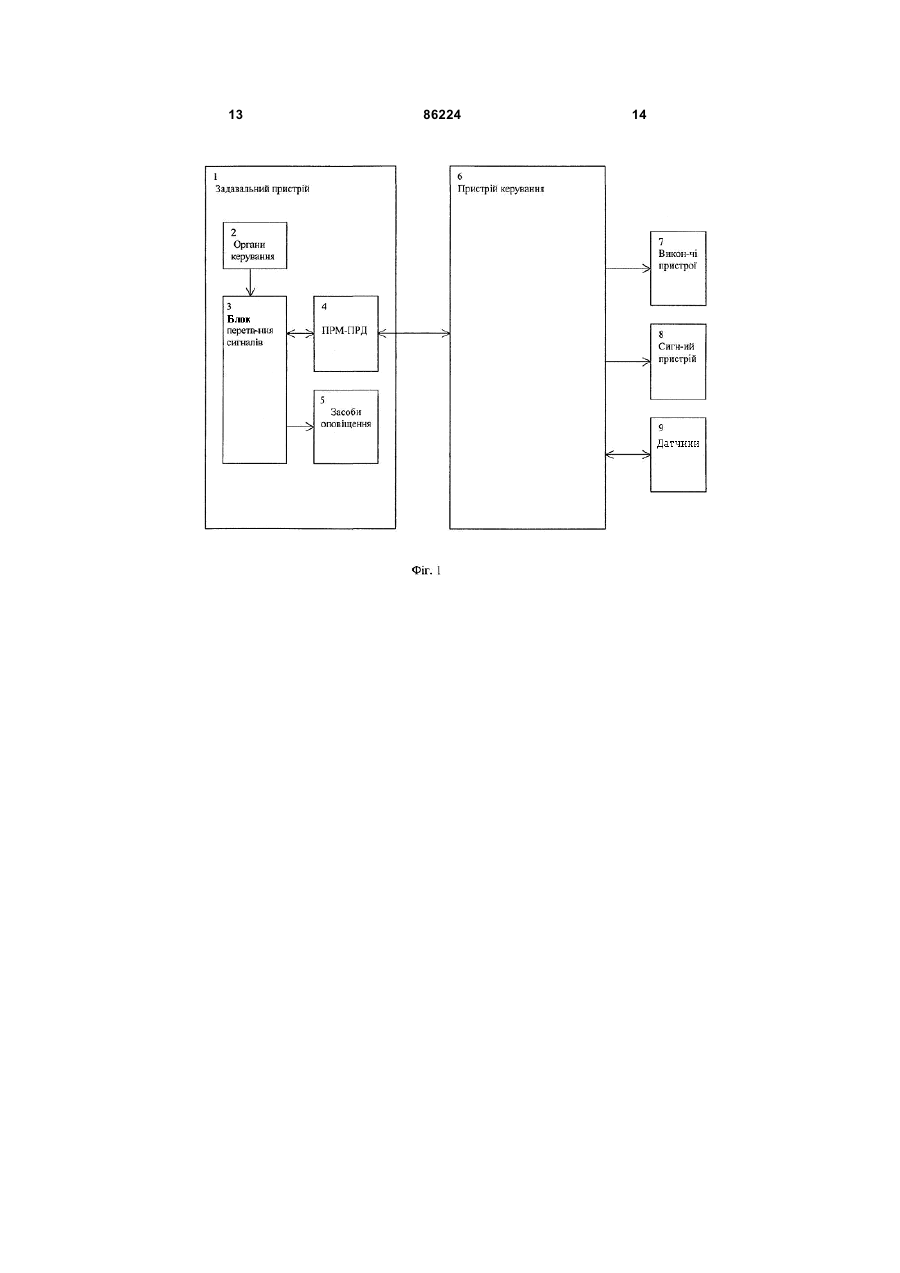
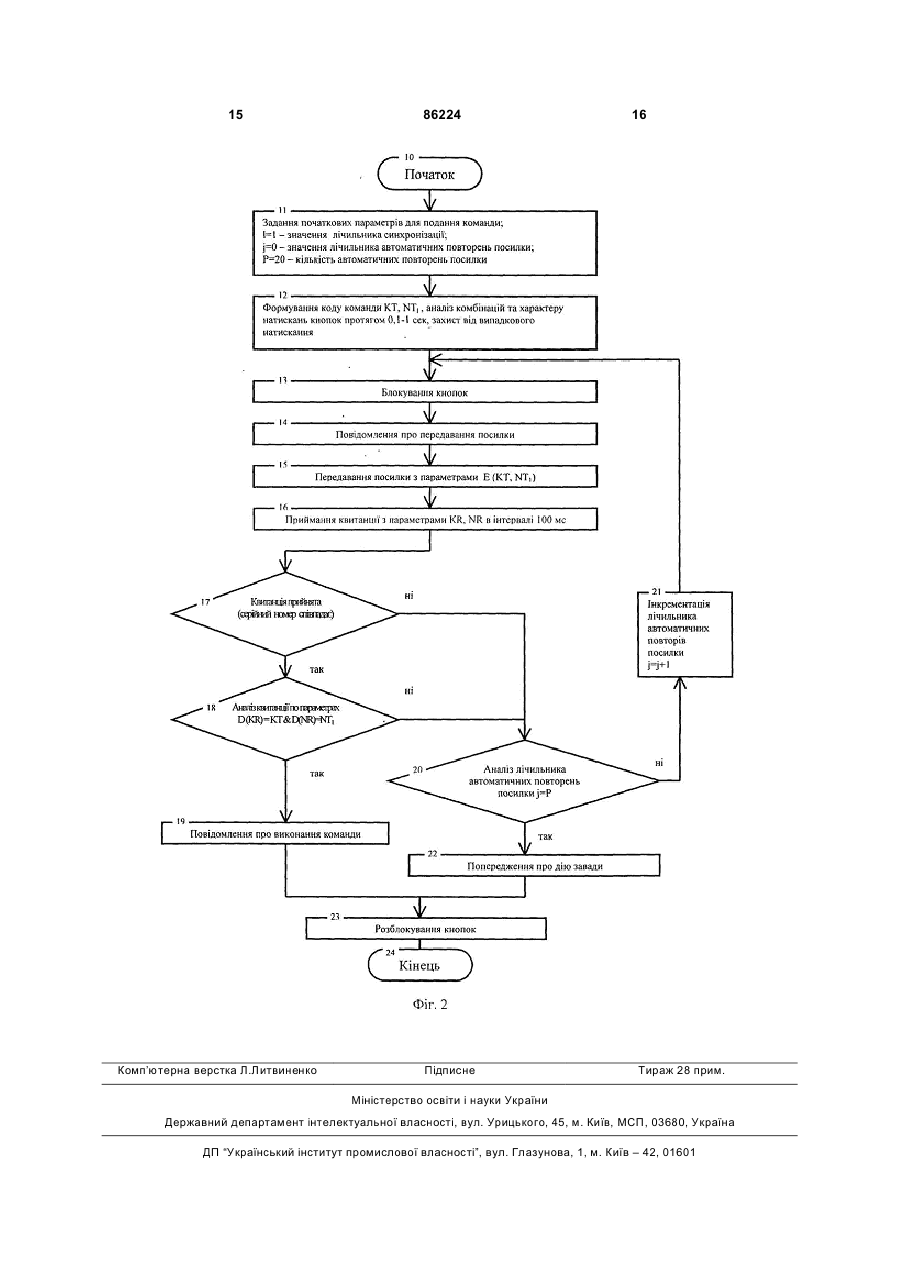
1. Спосіб керування охоронною системою транспортного засобу, при якому команди на керування охоронною системою подають із дистанційного задавального пристрою, який відрізняється тим, що дистанційний задавальний пристрій, при двосторонньому зв'язку з охоронною системою, отримує квитанцію про виконання прийнятої команди, якщо дистанційний задавальний пристрій, в межах установленого часу, не отримав від охоронної системи квитанцію або якщо квитанція не відповідає переданій команді, то дистанційний задавальний пристрій здійснює автоматично повторні передавання заданої команди, а кількість автоматичних повторних передавань команди установлюють за допомогою лічильника повторень команди або обмежують заданим інтервалом повторень, крім того, подають сигнали про дію завади в каналі зв'язку дистанційного задавального C2 2 UA 1 3 манітними вузлами застосовують цифрові кодові послідовності, в результаті чого запобігають можливість несанкціонованого доступу до двигуна та інших вузлів транспортного засобу, причому система автоматично переходить в режим охорони після виключення запалення та закривання дверей забезпечуючи, при цьому, високий рівень комфортності користування охоронною системою установленою на транспортному засобі [див. патент США №US 5.673.017 по МПК В60R25/10, G08C19/12]. Проте, існуюча система дистанційного запуску двигуна та керування вузлами транспортного засобу і запропонований в ній спосіб охорони транспортних засобів не запобігають повністю можливість крадіжки транспортного засобу. Зокрема, задання цифрових кодових послідовностей (команд) для дистанційного пуску двигуна або керування вибраним вузлом ТЗ здійснюють однократним натисканням відповідної клавіші або послідовним, однократним натисканням декількох клавіш на пульті дистанційного керування, а отже існує можливість "підбору" команд керування. Наприклад, команди які забезпечують можливість санкціонованого доступу в салон, пуску двигуна, розблокування вузлів та агрегатів можливо "підібрати" шляхом опробування пульта дистанційного керування (яким заволоділи непомітно для користувача) безпосередньо на ТЗ і, таким чином, привести ТЗ в рух та здійснити крадіжку. Відома система дистанційного керування, з верифікацією дистанційного передатчика. Відповідно з технічними вирішеннями, що застосовані в об’єкті винаходу по названому патенту передавач сигналів дистанційного керування оснащують індивідуальним кодом і, таким чином, можливість доступу до ТЗ (зокрема - можливість вмикання та вимикання режиму охорони та можливість дистанційного керування функціями ТЗ) забезпечують тільки за допомогою тих передавачів, індивідуальні коди яких зареєстровані в пам’яті засобів реєстрації дистанційних передавачів, причому засоби реєстрації можна переключати в режим реєстрації або в режим охорони. В режимі реєстрації дистанційних передавачів в пам’ять засобів реєстрації вводять індивідуальні коди передавачів, які будуть використовувати для дистанційного керування. До того ж, в режимі реєстрації система забезпечує індикацію інформації про те, що в пам’яті засобів реєстрації міг бути зареєстрований дистанційний передавач з новим індивідуальним кодом, в результаті чого попереджає користувача про можливість несанкціонованого керування ТЗ [див. патент US №6.320.514 по MПK G08C19/00]. Проте, існує можливість доступу до керування ТЗ з дистанційних передавачів зареєстрованих в системі несанкціоновано. Непомітну для користувача реєстрацію, наприклад, можна здійснити із радіопередавального пристрою під час переведення системи із режиму реєстрації в режим охорони. Інформацію про факт такої реєстрації користувач може отримати тільки в режимі реєстрації. Необхідність переключати засоби реєстрації дистанційних передавачів в цей режим існує тільки в певні проміжки часу, наприклад за потреби зареєструвати в системі додатковий передавач. А отже, 86224 4 є тривалі періоди часу в які користувач може не помітити, що в системі зареєстровано дистанційний передавач, з якого можна здійснювати несанкціоноване керування ТЗ. Найбільш близькими до запропонованих способу та системи охорони ТЗ є спосіб охорони транспортних засобів та охоронна система з його застосуванням запропоновані по [патенту України №72983]. Для керування охоронною системою, в запропонованих по патенту об’єктах винаходу, використовують дистанційні задавальні пристрої, а для формування команд керування застосовують динамічні коди. Відомі спосіб та система забезпечують можливість охорони ТЗ з працюючим та непрацюючим двигуном, реалізують санкціонований дистанційний пуск двигуна та санкціоноване дистанційне керування вузлами і агрегатами ТЗ, зокрема - замками дверей салону, окрім того, здійснюють подання інформаційних сигналів про стан та місце перебування ТЗ, а також про спроби несанкціонованого доступу до ТЗ, більше того, запобігають можливостям несанкціонованого керування вузлами і агрегатами ТЗ з використанням кодів команд керування "перехоплених" спеціальними пристроями. Захист від несанкціонованого застосування "перехоплених" кодів команд, для керування вузлами і агрегатами, реалізують шляхом підтвердження прав доступу до ТЗ за допомогою PIN-коду, а зазначений код передають із мініатюрного радіопередавального пристрою (радіопозначка). При експлуатації ТЗ радіопозначка постійно перебуває у користувача та випромінює малопотужні радіосигнали PIN-коду, а отже тільки при перебуванні користувача безпосередньо біля ТЗ або в його салоні (в зоні приймання) ці сигнали надходять на приймач охоронної системи і, таким чином, тільки на основі сигналів радіопозначки охоронна система забезпечує виконання всіх команд, що були подані із дистанційних задавальних пристроїв. Проте, в об'єктах винаходу, запропонованих по [патенту UA №72983], задавальні пристрої не оснащено органами які забезпечують санкціонований доступ до задавального пристрою, зокрема до задання та передавання команд, а отже існує можливість їх несанкціонованого використання та, більше того, за наявності радіопозначки, отриманої незаконним шляхом, можливість виконання охоронною системою команд, заданих із задавальних пристроїв і, таким чином, крадіжки ТЗ. Окрім того, в охоронній системі не забезпечують можливостей підтвердження відповідності команд, переданих зі штатних задавальних пристроїв, зокрема шляхом квитирування і, таким чином, відсутність квитирування переданих команд не забезпечує захищеності каналу зв’язку від постановлення спеціальних завад і "перехоплення" кодів команд, в результаті чого існує можливість використання "перехоплення" кодів для керування охоронною системою з метою крадіжки ТЗ. До того ж, задавальні пристрої не здійснюють автоматичного повторного передавання команд, що в певній мірі знижує надійність(достовірність) керування при експлуатації охоронної системи. 5 В основу винаходу поставлено така задача: створення способу та системи які запобігають можливість використання несанкціонованих дистанційних задавальних пристроїв, наприклад кодграберів за допомогою яких здійснюють "перехоплення" кодів команд керування з метою їх подальшого використання для несанкціонованого керування охоронною системою ТЗ. Поставлена задача вирішуються тим, що в способі охорони транспортних засобів, при якому керування вузлами транспортного засобу забезпечує охоронна система, згідно з винаходом, забезпечують можливість отримання на задавальний пристрій по зворотному зв’язку квитанції про виконання прийнятої команди і, таким чином підтверджують відповідність того, що команда передана із задавального пристрою, який входить до комплекту охоронної системи. До того ж, здійснюють автоматично повторні передавання заданої команди (в межах установленої кількості або інтервалу повторень) - якщо задавальний пристрій не отримав від охоронної системи квитанцію в межах установленого часу або, якщо квитанція не відповідає переданій команді. Більше того, якщо квитанція відсутня або не відповідає переданій команді і в межах установленої кількості або інтервалу повторень то, задавальний пристрій подає повідомлення про дію завад в каналі зв’язку і, отже, сповіщає про те, що охоронна система не виконала команду. Таким чином, запобігають можливість керування охоронною системою за допомогою "перехоплених" кодів команд та забезпечують достовірне передавання і виконання команди в умовах дії завад, в результаті чого досягають високого рівня надійності при керуванні охоронною системою. Крім того, для керування режимами роботи охоронної системи застосовують дистанційні задавальні пристрої в яких задання команд керування виконують шляхом N-кратної дії на один або декілька органів керування. Задання команди на пристрій, керування охоронної системи здійснюють наступним чином: - спочатку на органах керування задавального пристрою виконують дії по заданню команди, в результаті яких на блок-перетворення сигналів надходять задані сигнали (із параметрами та даними необхідними для формування коду команди), а надалі - дозволяючі дії в результаті яких на блок перетворення сигналів та(або) передатчика задавального пристрою надходить перший дозволяючий сигнал. Вище названі дії можуть бути виконані і в зворотній послідовності. Можливе задання команди і шляхом виконання дій в результаті яких на блок перетворення сигналів надходять тільки задані сигнали. Крім того, можливе і одночасне виконання дій по заданню команди та дозволяючих дій, наприклад при виконанні органів керування в вигляді даклилосенсорних давачів; - блок перетворення сигналів, по заданих сигналах та(або) заданих сигналах та першому дозволяючому сигналу, формує код команди (команду) або команду і другий дозволяючий сигнал та подає їх на передавач дистанційного задавального пристрою; - передавач здійснює передавання команди, якщо на його входи надходять: код команди або 86224 6 код команди, перший дозволяючий сигнал та (або) другий дозволяючий сигнал в будь-яких можливих послідовностях. Наприклад, для задання та передавання команди виконують наступну сукупність дій - спочатку натискають на клавішу (клавіші) введення PINкоду або виконують дактилоскопію пальців рук за допомогою фотозчитуючого пристрою, а після цього на органах керування задавального пристрою виконують дії, які забезпечують подання заданих сигналів на блок перетворення сигналів, або ж спочатку натискають на клавіші які забезпечують подання заданих сигналів на блок перетворення сигналів і надалі на органах керування задавального пристрою виконують дії, що забезпечують подання першого дозволяючого сигналу (задання PIN-коду і т.п.) на блок перетворення сигналів і(або) передавач задавального пристрою. Таким чином, задання команд із задавального пристрою на пристрій керування охоронної системи можливе за умови знання алгоритму дій по їх заданню та (або) тільки по першому та(або) другому дозволяючих сигналах, в результаті чого запобігають можливість несанкціонованого використання задавальних пристроїв. При цьому, автоматичні повторні передавання заданої команди здійснюють: - по закінченню інтервалу часу, що установлений для отримання (по зворотному зв’язку) сигналів підтвердження про достовірне передавання та виконання команди; - або якщо параметри отриманої на задавальний пристрій квитанції не відповідають параметрам заданої команди. В якості відповідності команди та квитанції, наприклад, застосовують такі параметри як значення лічильника синхронізації, значення лічильника автоматичних повторень посилки, значення коду серійного номера задавального пристрою, коду команди та інш.. До того ж, автоматично повторні передавання команди здійснюють із блокуванням або без блокування органів керування. Причому, на час автоматичного повторного передавання команди блокують всі органи керування або їх певну кількість. Таким чином, забезпечують достовірне передавання та виконання команд при дії завад, які випромінюють (під час дистанційного керування охоронною системою) з метою "перехоплення" кодів команд та запобігають можливостям керування охоронною системою за допомогою таких кодів. Причому, кількість автоматичних повторних передавань заданої команди установлюють за допомогою лічильника повторень команд або обмежують заданим інтервалом часу автоматичних повторень. Якщо в межах установленої кількості або інтервалу повторень квитанція відсутня або параметри квитанції, що прийнята не відповідають параметрам команди то, по крайній мірі, за допомогою засобів оповіщення задавального пристрою подають повідомлення про дію завади в каналі зв’язку задавального пристрою та охоронної системи, в результаті чого, користувач ТЗ може контролювати якість передавання команд керування. 7 Рішення поставленої задачі досягають тим, що до складу охоронної системи, яка реалізує запропонований спосіб входять: дистанційні задавальні пристрої, виконі з можливістю одно- або двостороннього зв’язку, а з пристроїв здійснюють задання команд керування на пристій керування охоронною системою, а також приймання квитанцій і даних від пристрою керування. Причому, кожному задавальному пристрою, що входить до складу охоронної системи, присвоюють індивідуальний серійний номер, який входить в структуру команди керування. Відповідно при квитируванні заданої команди цей же серійний номер входить в структуру прийнятої квитанції, в результаті чого забезпечують ідентифікацію задавального пристрою та підтверджують правосильність заданої команди. До того ж, задавальні пристрої оснащують: органами керування, які використовують для подання заданих сигналів на блок перетворення сигналів та подання першого дозволяючого сигналу - на блок перетворення сигналів та(або) передавач. Органи керування, наприклад, можуть бути виконані в вигляді клавішних панелей і (або) сенсорних панелей та(або) біометричних пристроїв (зокрема, дактилосенсорних лінійок або матриць) та інші. До того ж, сенсорні поля панелей доцільно об'єднувати в сегментні групи за функціональним призначенням (наприклад, сегментна група для подання заданих сигналів та сегментна група для подання дозволяючих сигналів); блоком перетворення сигналів, який (при отриманні заданих сигналів або заданих сигналів та першого дозволяючого сигналу) формує код команди (команду) та (або) команду та другий дозволяючий сигнал. Окрім того, він здійснює керування режимами передавання заданої команди, а точніше забезпечує виконання режиму однократного передавання заданої команди або переводить задавальний пристрій в режим повторних передавань команди, які виконують автоматично. Режим однократного передавання забезпечують за умови отримання від пристрою керування охоронною системою квитанції про достовірне виконання заданої команди, а режим автоматичного повторного передавання команди - за відсутності зв’язку з охоронною системою в межах часу установленого для приймання квитанції від пристрою керування або за умови, що параметри квитанції яка надійшла на блок перетворення сигналів в межах цього часу не відповідають параметрам заданої команди. Кількість автоматичних повторних передавань заданої команди установлюють за допомогою лічильника повторень команд або обмежують заданим інтервалом автоматичних повторень, для чого в структурі задавального пристрою (зокрема, блоку перетворення сигналів) передбачають апаратні або програмові засоби лічильника та таймера повторень заданої команди. Автоматичні повторні передавання заданої команди здійснюють із блокуванням всіх органів керування або їх заданої кількості, а також без блокування органів керування. Зокрема, відповідно до функціонального призначення одна частина 86224 8 входів та (або) виходів блоку перетворення сигналів може перебувати в відкритому, а інша в закритому стані. Наприклад, на час подання заданих сигналів від органів керування на блок перетворення сигналів його входи переводять в відкритий стан а виходи в закритий, а на час подання коду команди на передавач входи пристрою перетворення сигналів переводять в закритий стан, при цьому його виходи знаходяться в відкритому стані; приймально-передавальним блоком, який здійснює передавання заданих команд та службових даних на пристрій керування охоронною системою та приймання квитанцій про виконання заданих команд, а також службової інформації від пристрою керування охоронною системою. Причому, передавач здійснює передавання заданої команди на пристрій керування охоронної системи при отриманні заданих сигналів або заданих сигналів та першого та (або) другого дозволяючих сигналів. Приймач приймально-передавального пристрою перебуває в режимі приймання постійно або переводиться в цей режим під керуванням блоку перетворення сигналів; засобами оповіщення, які забезпечують подання відео- та (або) вібро-, та (або) акустичних сигналів за допомогою яких, по крайній мірі, сповіщають, що в межах установленого часу квитанція не прийнята на задавальний пристрій, а таким чином і про закінчення інтервалу часу установленого для її приймання. Засоби оповіщення подають сигнали сповіщення і за умови - якщо параметри квитанції, що прийнята на задавальний пристрій, не відповідають параметрам переданої команди. Окрім того, засоби оповіщення забезпечують подання і інших сигналів, наприклад повідомлень про виконання команди, попереджень про дію завади, даних про стан вузлів та агрегатів ТЗ і т.п.. Охоронна система, також, споряджена: пристроєм керування, наприклад мікропроцесорним пристроєм виконаним з можливістю двостороннього зв’язку із задавальними пристроями. Пристрій керування забезпечує керування режимами роботи охоронної системи, зокрема обробляє команди, що надійшли від задавальних пристроїв та сигнали датчиків і здійснює формування сигналів на виконавчі пристрої, сигнальний пристрій та датчики, окрім того, передає на задавальний пристрій сигнал (квитанцію) з інформацією про виконання прийнятої команди, а також іншу інформацію, наприклад дані про стан вузлів і агрегатів ТЗ; виконавчими пристроями, які здійснюють керування роботою вузлів і агрегатів ТЗ, наприклад виконують їх блокування та розблокування; сигнальним пристроєм, який подає тривожні та інформаційні сигнали, причому пристрої установлюють на ТЗ та (або) за його межами; датчиками, які здійснюють контроль за доступом до ТЗ та за станом вузлів і агрегатів ТЗ. На кресленні Фіг.1 наведена схема функціональної охоронної системи із застосуванням запропонованого способу охорони транспортних засобів. 9 На схемі зображено задавальний пристрій 1 (наприклад, пульт дистанційного радіокерування, який конструктивно виконаний в вигляді чотирикнопкового брелока) до складу якого входять: - органи керування 2, наприклад кнопковий регістр із трьох кнопок із самоповерненням, що підключені до входів перетворювача напруга-код - для подання заданих сигналів на мікроконтролер пристрою перетворення сигналів 3 та дактилосенсорна лінійка на основі приладів з зарядовим зв’язком - для подання сигналу дозволяючого на блок перетворення сигналів 3 та (або) на приймальнопередавальний пристрій 4; - блок перетворення сигналів 3, наприклад мікроконтролер MSP430F415 виробництва фірми Texas Instruments США (див. http ://www. tі .com/, розділ Microcontrollers), зв’язаний з органами керування 2, а також з приймально-передавальним блоком 4 та засобами оповіщення 5; - приймально-передавальний блок 4, наприклад, виконаний на основі мікросхеми ТАЗ1142 виробництва фірми Tochiba Японія та налагоджений на приймання-передавання сигналів в смузі частот 433,795-433,045МГц (відповідно до рішення Держкомзв’язку України від 17.12.2002р. №71-В зазначена смуга частот виділена для використання охоронно-противикрадними засобами з дозволеною потужністю випромінювання радіопередавачів не більше 10мВт). При цьому, передавач пристрою 4, наприклад, здійснюює передавання сигналів з кодовим захистом каналів та амплітудною маніпуляцією несучого сигналу); - засоби оповіщення 5, виконані з можливістю подання відео-, вібро- та звукових сигналів і реалізовані, наприклад, на основі 96-сегментного монохромного РКІ-дисплея, мініатюрного електричного вібромотора та мініатюрного електромагнітного випромінювача звукових сигналів. На схемі Фіг.1 також показані: - пристрій керування 6, наприклад мікропроцесорний пристрій, що виконаний з можливістю двостороннього радіозв’язку із задавальним пристроєм 1; - виконавчі пристрої 7, наприклад електромагнітні реле постійного струму, які здійснюють блокування та розблокування вузлів і агрегатів ТЗ, а саме комутацію електричних ланцюгів системи пуску двигуна внутрішнього згоряння, електроприводів замків дверей і т.п.; - сигнальний пристрій 8, наприклад сирена; - датчики 9, що подають на пристрій 6 сигнали про стан вузлів і агрегатів ТЗ та про спроби несанкціонованого доступу до ТЗ. Охоронна система працює наступним чином. Для формування команд керування застосовують динамічні коди, які мікроконтролер пристрою перетворення сигналів 3 генерує по відомому з рівня техніки алгоритму Keeloq (наприклад, див. http://www.microchip.com, Products/RadioFrequencyDevices/Applications/KEELOQ@Autentication/ HCS300). Із задавальних пристроїв 1 забезпечують дистанційне керування вмиканням та вимиканням режиму охорони, блокуванням та розблокуванням вузлів і агрегатів ТЗ та інш. Зокрема, із пристроїв 1 86224 10 можливо здійснювати керування електроприводами замків дверей, капота, багажника електоприводами склопідіймачів, виконувати дистанційний пуск двигуна і т.п. Можливість задання команд із пристрою 1 на пристрій керування 6, наприклад, забезпечують шляхом дактилоскопічного зчитування малюнка шкірного покрову одного або декількох пальців рук за допомогою дактилосенсорного пристрою, що входить до складу органів керування 2. При цьому, на блок перетворення сигналів 3 надходить перший дозволяючий сигнал, в результаті чого його входи, до яких підключено кнопковий регістр органів керування 2 переходять в відкритий стан. Таким чином, забезпечують можливість надходження заданих (для формування команди) сигналів на мікроконтролер пристрою 3. Надалі необхідну команду задають шляхом N-кратного натискання відповідної кнопки або кнопок органів 2. На підставі сигналів заданих від органів 2 мікроконтролер пристрою 3 формує код команди та (або) другий дозволяючий сигнал. Передавання команди на пристрій керування 6 передавач приймально-передавального пристрою 4 здійснює при надходженні на його входи коду команди та (або) першого та (або) другого дозволяючих сигналів. Після передавання команди пристрій 3 перебуває в режимі чекання квитанції від пристрою 6 і по завершенню інтервалу часу установленого для її приймання мікроконтролер пристрою 3 переходить на оброблення програми повторного автоматичного передавання команди. При кожній новій виборці коду команди (для повторного передавання) мікроконтролер пристрою 3 змінює значення лічильника автоматичних повторів команди на одиницю та забезпечує такі передавання до отримання квитанції від пристрою 6 про успішне виконання заданої команди. При цьому, наприклад, лічильник автоматичних повторень команди може приймати значення не більше двадцяти, а таким чином цим значенням обмежують і кількість автоматичних повторень по передаванню команди. Автоматично повторні передавання можуть здійснюватися із блокуванням або без блокування органів керування 2. Блокування органів 2, наприклад, можливо здійснити шляхом переведення входів пристрою 3 (до яких підключено органи 2, що їх блокують) в закритий стан. Після отримання квитанції та за умови відповідності параметрів квитанції і заданої команди пристрій 1 за допомогою засобів оповіщення 5 подає повідомлення про виконання команди, а за умови невідповідності названих параметрів або після завершення циклу автоматичних повторних передавань команди та ненадходженні квитанції попередження про дію завади. По завершенню цих операцій мікроконтролер пристрою 3 переводить його входи в відкритий стан і, таким чином, здійснює розблокування органів 2, в результаті чого забезпечує можливість задання нових команд керування на пристрій 6. Можливі варіанти реалізації пристрою 1 в яких розблокування органів 2 для задання команд керування (після їх автоматичного блокування на 11 час повторного автоматичного передавання команди) здійснюють шляхом подання на пристрій 3 першого дозволяючого сигналу, наприклад від дактилосенсорного датчика, що входить до складу органів 2. На кресленні Фіг.2 наведена блок-схема алгоритму функціонування пристрою 1 при заданні команди керування на пристрій 6. Приведена схема ілюструє функціонування однієї із можливих реалізацій пристрою. Умовні позначення, що прийняті на схемі: f=E(x) - функція шифрування блока даних із заданими параметрами команди; f=D(x) - функція дешифрування блока даних із прийнятими параметрами квитанції, де x=KT, NT - параметри для кодування посилки при заданні команди; x=KR, NR - параметри декодування прийнятої посилки (квитанції); КТ - код посилки команди. Псевдовипадкове число, що змінюється при кожному черговому (іму) заданні команди; NT - код лічильника синхронізації при заданні команди; KR - код посилки квитанції. Для і-го задання команди КТi = KRi, де і - ціле число натурального ряду; NR - код лічильника синхронізації прийнятої квитанції. Для квитанції, що відповідає і-му заданню команди NRi = NTi; I - значення лічильника синхронізації. Параметр 1 для і-го задання команди дорівнює значенню NTi; j - значення лічильника повторень посилки (команди). Параметр змінюється від нуля до Ρ де, Ρ - кількість автоматичних повторень посилки (команди). На схемі показані наступні блоки: 10 - Початок. Пристрій перебуває в режимі готовності задання команд; 11 - Задання початкових параметрів (наприклад, l=1, j=0, P=20) та подання заданих сигналів 86224 12 (від органів 2 на пристрій 3) для формування команди; 12 - Формування коду команди КТ, NT1. Аналіз комбінацій та характеру натискання кнопок органів задання 2. Захист від випадкового натискання; 13 - Блокування органів задання 2; 14 - Повідомлення (за допомогою засобів 5) про передавання посилки КТ; 15 - Передавання посилки з параметрами Ε (КТ, NT1); 16 - Приймання квитанції з параметрами KR, NR1 в інтервалі 100мс; 17 - Прийнята чи ні квитанція з серійним номером, що відповідає серійному номеру задавального пристрою 1, з якого була задана команда; 18 - Перевірка відповідності параметрів KR, NR1 прийнятої квитанції параметрам заданої команди КТ, NT1; 19 - Повідомлення про виконання команди; 20 - Аналіз лічильника автоматичних повторень посилки (команди). Аналіз виконують якщо в інтервалі часу 100мс на пристрій 1 не прийнята квитанція; 21 - Інкрементація лічильника автоматичних повторень посилки. Пристрій 3 збільшує значення лічильника на одиницю і здійснює виборку (із пам’яті програми) коду заданої команди та забезпечує керування її передаванням. В залежності від результатів отриманих в блоках 17 та 18 може бути здійснено до двадцяти циклів повторного передавання команди. Цикл дорівнює інтервалу установленому для приймання квитанції - 100мс; 22 - Попередження про дію завади. Засоби 5 подають попередження за відсутності квитанції та при завершенні всіх двадцяти циклів автоматичного повторного передавання; 23 - Розблокування кнопок. Пристрій 3 переводить свої входи в відкритий стан і, таким чином розблоковує органи 2; 24 - Кінець. Задавальний пристрій переходить в режим готовності задання команд. 13 86224 14 15 Комп’ютерна верстка Л.Литвиненко 86224 Підписне 16 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device of remote control of intrusion protection system of transport vehicles
Автори англійськоюKupriienko Oleksandr Mykhailovych
Назва патенту російськоюСпособ дистанционного управления охранной системой транспортных средств и охранная система транспортных средств
Автори російськоюКуприенко Александр Михайлович
МПК / Мітки
МПК: G08C 17/00, G08B 25/10, B60R 25/00, B60R 25/10
Мітки: дистанційного, транспортних, системою, охоронна, спосіб, система, керування, засобів, охоронною
Код посилання
<a href="https://ua.patents.su/8-86224-sposib-distancijjnogo-keruvannya-okhoronnoyu-sistemoyu-transportnikh-zasobiv-ta-okhoronna-sistema-transportnikh-zasobiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного керування охоронною системою транспортних засобів та охоронна система транспортних засобів</a>
Спосіб охорони транспортних засобів та система для його здійснення
Номер патенту: 72983
Опубліковано: 16.05.2005
Автор: Купрієнко Олександр Михайлович
МПК: B60R 25/00, B60R 25/10, B60R 25/04
Мітки: система, транспортних, засобів, спосіб, здійснення, охорони
Формула / Реферат:
1. Спосіб охорони транспортного засобу, при якому управління вузлами транспортного засобу забезпечує охоронна система, який відрізняється тим, що управління режимами роботи охоронної системи здійснюють шляхом подання команд із задавальних пристроїв на пристрій керування, причому задавальні пристрої виконують з можливістю подання команд в дистанційному і (або) локальному режимах, а пристрій керування на підставі отриманих команд формує сигнали...
Система для обміну даними між об’єктом керування та системою обробки даних
Номер патенту: 61852
Опубліковано: 17.11.2003
Автори: Бандурка Олександр Маркович, Попов Олександр Анатолійович, Угровецький Олег Петрович, Симов'ян Саркіс Ваграмович, Шаповал Володимир Іванович
МПК: H04M 11/04, G08B 25/00
Мітки: система, даних, системою, об'єктом, обробки, керування, обміну, даними
Формула / Реферат:
1. Система для обміну даними між об'єктом керування і системою обробки даних, що містить приймач вхідних сигналів, вхід якого сполучений з виходом об'єкта керування, а вихід - з центральним блоком керування, вихід якого сполучений по лінії зв'язку з передавачем, яка відрізняється тим, що центральний блок керування має другий вихід, підключений через приймач-передавач до другої лінії зв'язку, яка має середовище для передавання, інше ніж...
Пристрій для дистанційного релейно-контактного керування по тролеях
Номер патенту: 81909
Опубліковано: 25.02.2008
Автор: Долгов Юрій Леонідович
МПК: B61L 25/00, B60L 15/00, B60L 15/20
Мітки: дистанційного, керування, пристрій, тролеях, релейно-контактного
Формула / Реферат:
Пристрій для дистанційного релейно-контактного керування по тролеях, наприклад електровозами з приводом змінного струму і живленням по чотирипровідній контактній лінії, що складається з двох паралельних ланцюгів, підключених однією спільною точкою до тролейного провідника, і двох паралельних ланцюгів, підключених однією спільною точкою до тролейного струмознімача, інші спільні точки обох паралельних ланцюгів включені в ланцюг змінного...
Дорожня розмітка для автоматичного керування рухом транспортних засобів та спосіб автоматичного керування рухом
Номер патенту: 80389
Опубліковано: 25.09.2007
Автори: Сніцарук Леонід Адамович, Тюлькін Сергій Павлович
МПК: G06G 7/78, G08G 1/00, E01C 9/00
Мітки: автоматичного, розмітка, спосіб, дорожня, засобів, рухом, керування, транспортних
Формула / Реферат:
1. Дорожня розмітка для автоматичного керування рухом транспортного засобу, що складається з ліній, нанесених кольоровим матеріалом на проїзну частину дороги, яка відрізняється тим, що вона містить додаткові лінії дорожньої розмітки, в яких вздовж напрямку руху транспортних засобів за заданим законом чергуються ділянки ліній з високою та низькою електропровідністю з можливістю одержання інформації від індуктивних давачів, встановлених на...
Система резервування вимірників тримірного руху транспортних засобів
Номер патенту: 18796
Опубліковано: 15.11.2006
Автори: Журавльова Надія Костянтинівна, Сагіна Марина Юріївна, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: транспортних, засобів, тримірного, вимірників, резервування, система, руху
Формула / Реферат:
1. Система резервування вимірників тримірного руху транспортних засобів, що містить три датчики, осі чутливості яких спрямовані уздовж трьох взаємно перпендикулярних осей зв'язаної системи координат керування транспортного засобу, виходи яких з'єднані з пристроєм контролю датчиків, яка відрізняється тим, що в неї введені чотири додаткових датчики, осі чутливості яких спрямовані вздовж осей косокутної системи координат, що розташовані...
Попередній патент: Похідні 1н-тієно[2,3-c]піразолу, призначені для використання як інгібітори кінази
Наступний патент: Спосіб спалювання горючих відходів
Випадковий патент: Спосіб окислення органічних сполук