Пристрій для транспортування і кантування слябів
Номер патенту: 88536
Опубліковано: 25.03.2014
Автори: Шелестов Іван Андрійович, Дзержинський Віталій Олександрович, Кіценко Дмитро Віталійович, Плаксій Олександр Григорович, Сагайда Євгенія Юрійовна

Формула / Реферат
1. Пристрій транспортування і кантування слябів, що містить підвішену на канатах візка механізму головного підйому мостового крана за допомогою канатних блоків раму, забезпечену вертикальними напрямними і вантажопідйомними електромагнітами, який відрізняється тим, що пристрій додатково забезпечений, наприклад двома, рухомими балками з вушками, встановленими в вертикальних напрямних рами, а вантажопідйомні магніти утворюють окремі групові електромагнітні захоплювачі, наприклад два, забезпечені окремими системами керування і електроживлення і закріплені за допомогою підвісок з гнучкими зв'язками, наприклад ланцюгами, закріпленими в вушках вищезазначених рухомих балок.
2. Пристрій транспортування і кантування слябів за п. 1, який відрізняється тим, що кожна рухома балка додатково забезпечена підйомними механізмами, наприклад, у вигляді закріплених на рамі пристрою трьох мотор-редукторів і взаємодіючих з ними передач "гвинт-гайка", змонтованих на рухомій балці, а кожен електромагніт встановлений в підвісці із забезпеченням вільного обертання в горизонтальній площині, при цьому підйом кожної рухомої балки з груповим електромагнітним заходами виконують за допомогою вищезазначених підйомних механізмів, а підйом та переміщення всього пристрою для транспортування і кантування слябів виконують за допомогою механізмів мостового крана.
Текст
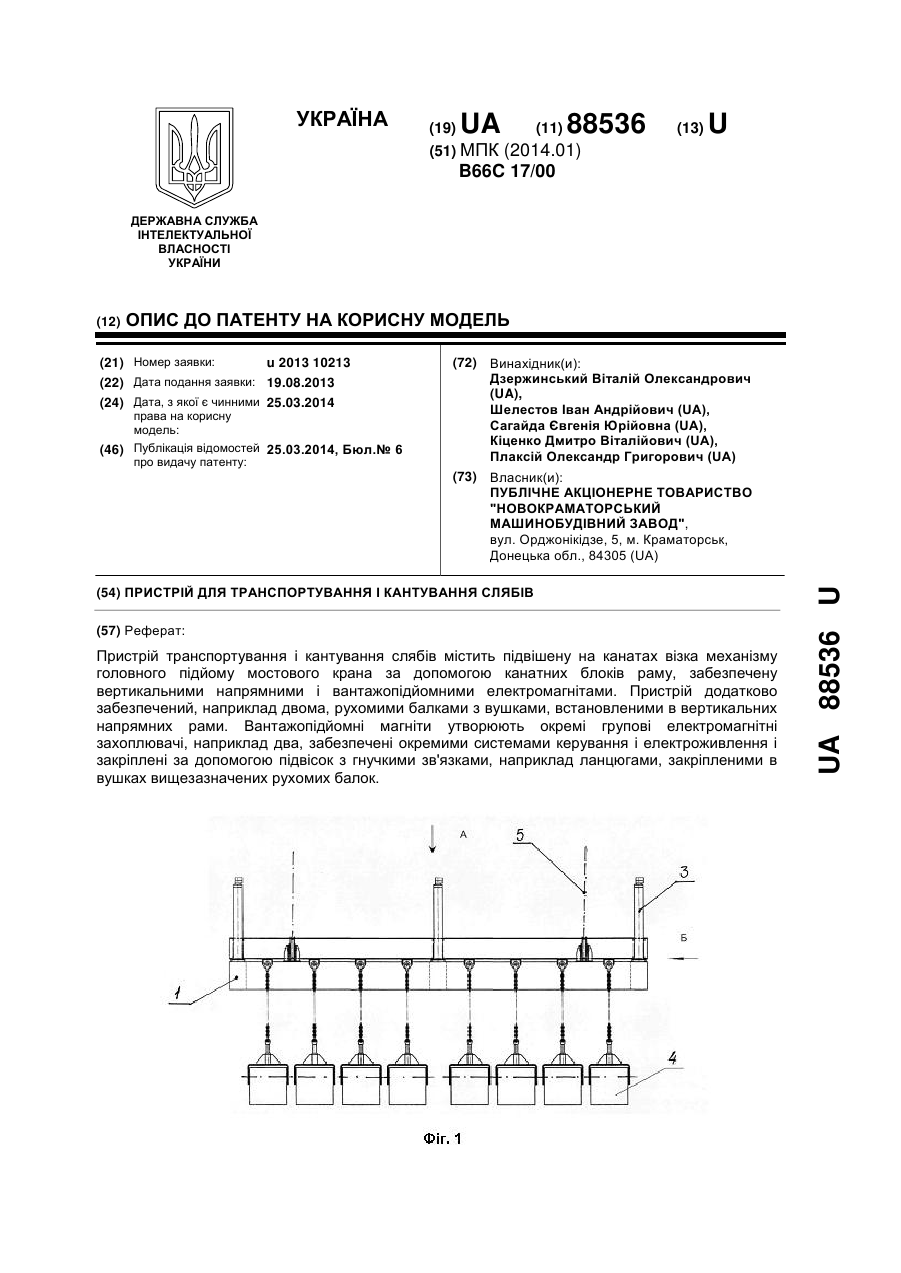
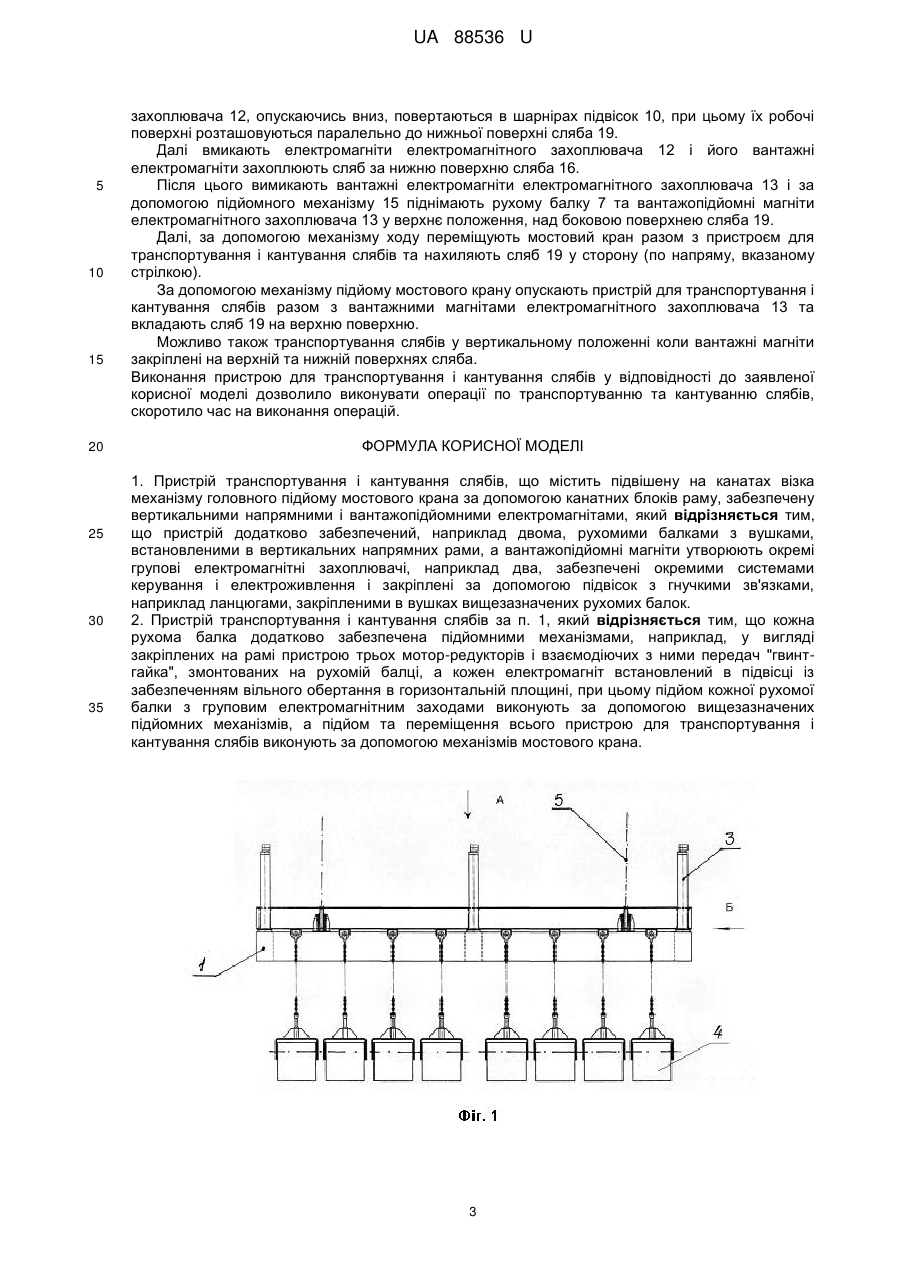
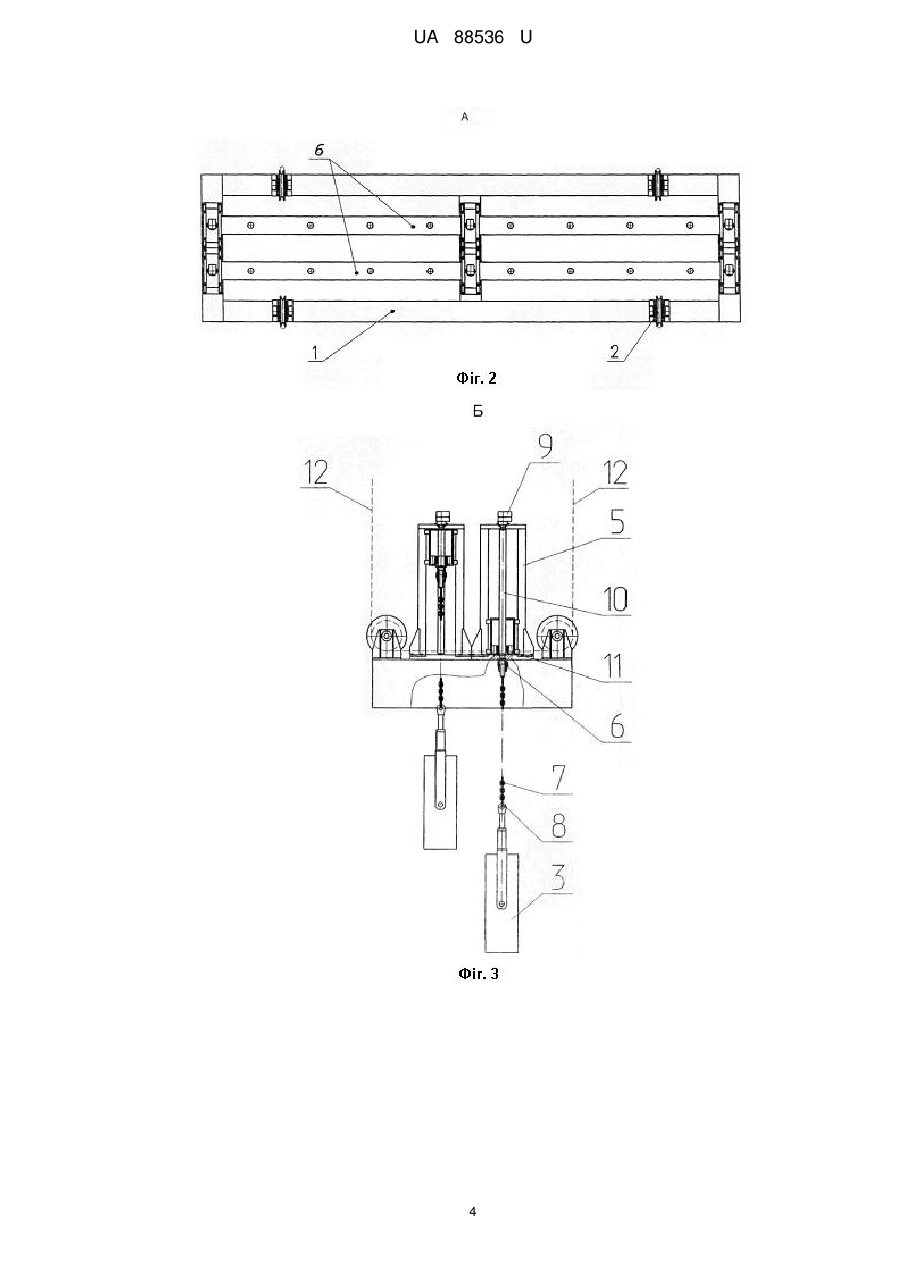
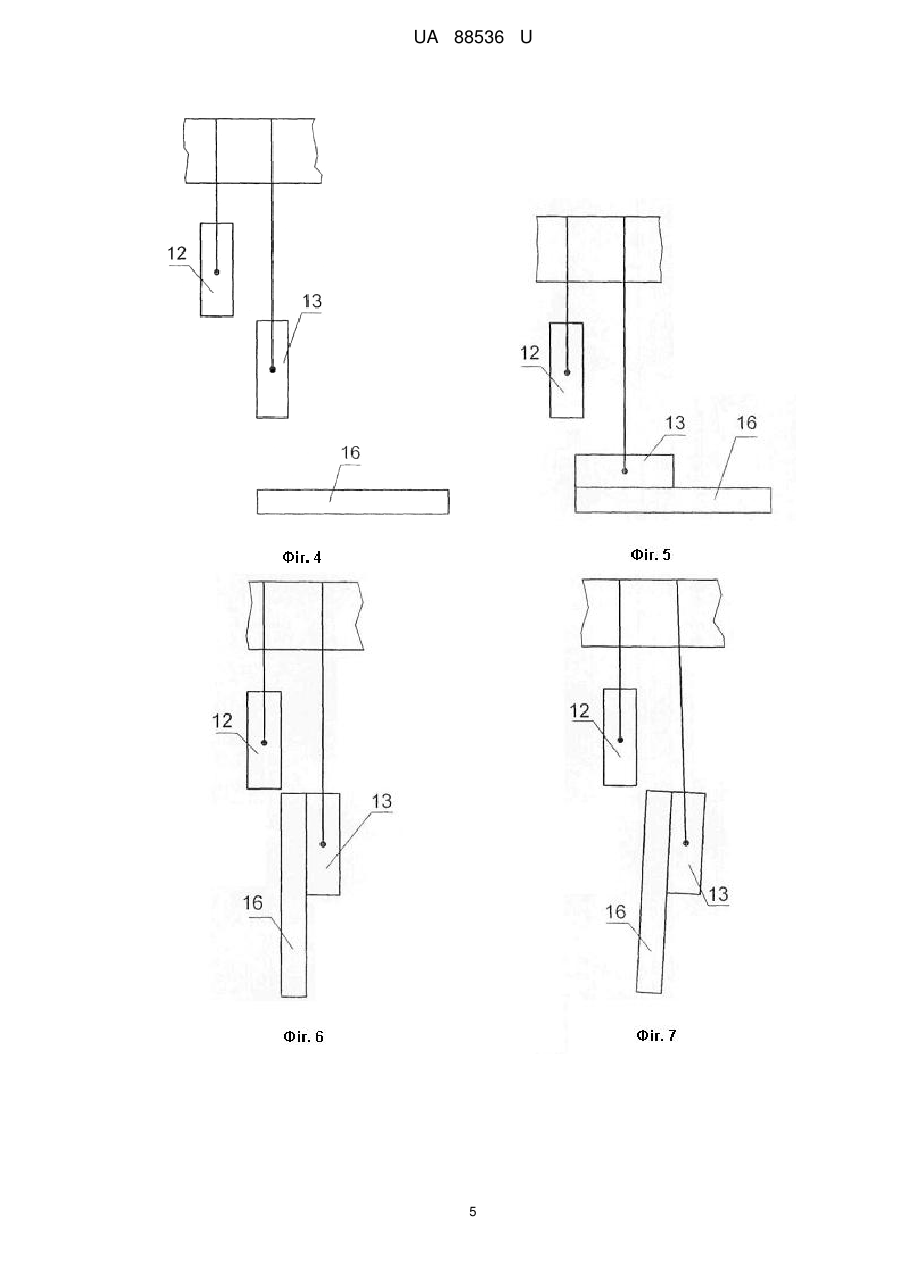
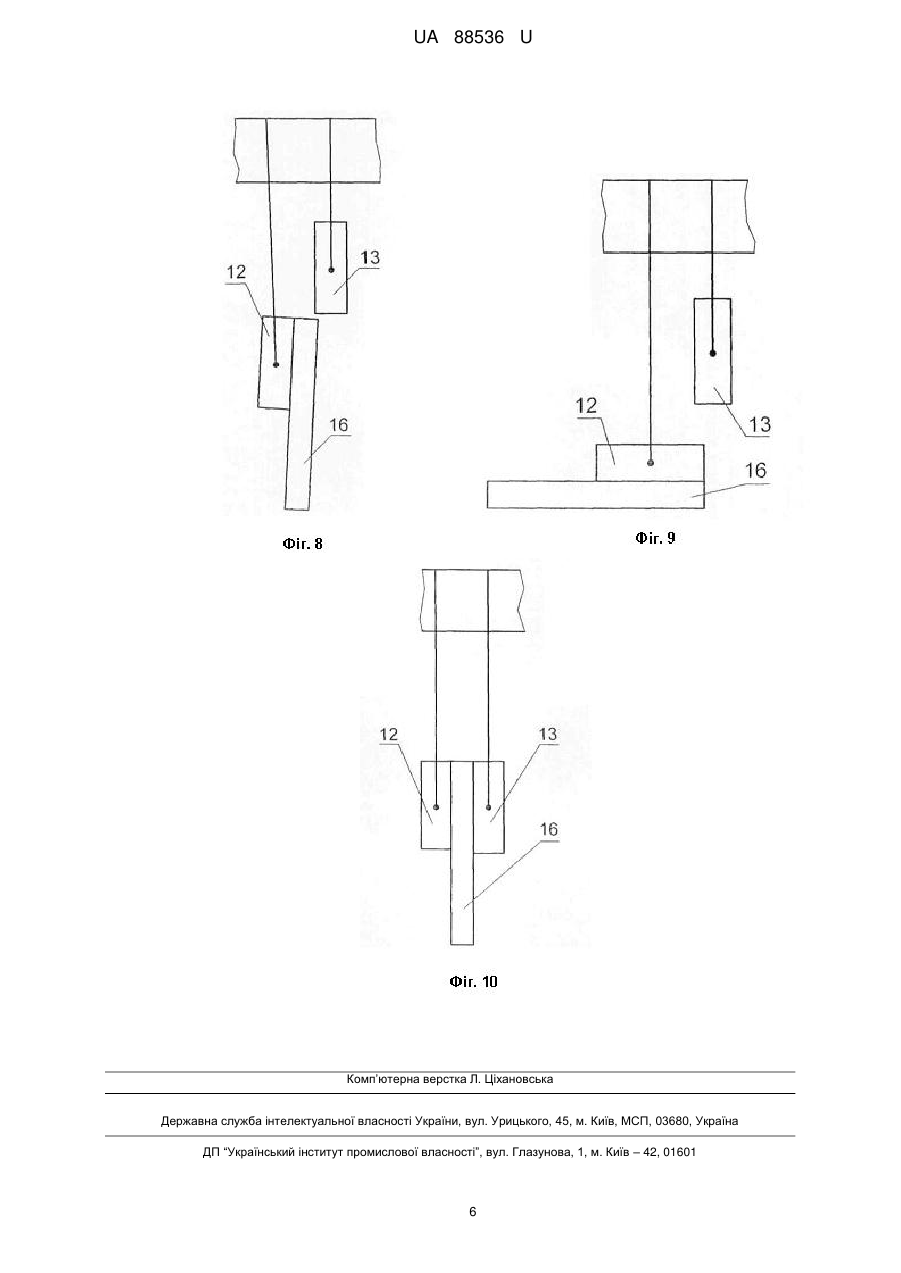
Реферат: Пристрій транспортування і кантування слябів містить підвішену на канатах візка механізму головного підйому мостового крана за допомогою канатних блоків раму, забезпечену вертикальними напрямними і вантажопідйомними електромагнітами. Пристрій додатково забезпечений, наприклад двома, рухомими балками з вушками, встановленими в вертикальних напрямних рами. Вантажопідйомні магніти утворюють окремі групові електромагнітні захоплювачі, наприклад два, забезпечені окремими системами керування і електроживлення і закріплені за допомогою підвісок з гнучкими зв'язками, наприклад ланцюгами, закріпленими в вушках вищезазначених рухомих балок. UA 88536 U (12) UA 88536 U UA 88536 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі транспортування вантажів, а саме до підйомних кранів, переважно мостових, призначених для маніпулювання виробами в прокатних цехах, а саме для кантування слябів. Відомий мостовий магнітний кран, забезпечений одним вантажопідйомним електромагнітом, підвішеним на гаку головного або допоміжного підйому. Кран дозволяє перенавантажувати феромагнітні матеріали (сталеву і чавунну стружку) і деталі: сталевий металопрокат, відливання і виковки, листове вальцювання, (див. наприклад книгу "Справочник по кранам: в 2 т. Т. 2 Характеристики и конструктивные схемы кранов, механизмы кранов, их детали и узлы. Техническая эксплуатация кранов / М.П. Александров, М.М. Гохберг, А.А Ковин и др.; Под общ. ред. М.М. Гохберга. - Л.: Машиностроение. Ленингр. Отд-ние, 1988., стор. 43, мал. IV.2.10.). До недоліків відомого магнітного крана слід віднести неможливість транспортування за допомогою відомого крана відливань після МНЛЗ - слябів, що мають достатньо велику довжину і вагу. Відомий також підйомний кран, що містить мостову металоконструкцію, встановлену на розміщених на рейковому шляху опорних колесах, рухомий візок з траверсою, оснащену магнітами і напрямними рамами, які підвішені до рами візка за допомогою просторових шарнірів, а на суміжних сторонах моста і вищезазначених рамах, паралельно до рейкового шляху встановлені опори ковзання. Відомий кран служить для транспортування та складування довгомірних сталевих виливок (слябів) після МНЛЗ (див. наприклад патент України на корисну модель № 23728, МПК В66С 17/00). Відомий підйомний кран і заявлена корисна модель мають загальні істотні ознаки - рухому траверсу, що підвішена на вантажопідйомних канатах візка крана, вертикальні напрямні, вантажопідйомні магніти. По сукупності істотних ознак, вищезазначений підйомний кран є найбільш близьким до заявленої корисної моделі і може бути прийнятий за найближчий аналог. До недоліків найближчого аналога слід віднести складність конструкції і складність кантування слябів під час складування їх в пакети. У основу корисної моделі поставлено задачу підвищити ефективність і надійність роботи пристрою транспортування і кантування слябів, шляхом оснащення пристрою рухомими балками з вушками, встановленими в вертикальних напрямних рами і підйомними механізмами та розподіленні вантажних електромагнітів на окремі групові електромагнітні захоплювачі, і за рахунок технічного результату, що полягає в забезпеченні незалежної роботи групових електромагнітних захоплювачів. Цей технічний результат отриманий за рахунок того, що пристрій транспортування і кантівки слябів, що містить підвішену на канатах візка механізму головного підйому мостового крана за допомогою канатних блоків раму, забезпечену вертикальними напрямними і вантажопідйомні електромагніти, додатково забезпечений рухомими балками з вушками, встановленими в вертикальних напрямних рами, а вантажопідйомні магніти закріплені за допомогою ланцюгів в вушках вищезазначених рухомих балок, крім того, кожна рухома балка додатково забезпечена підйомними механізмами, наприклад, у вигляді закріплених на рамі трьох мотор-редукторів та передач "гвинт-гайка", при цьому підйом кожної рухомої балки з вантажопідйомними магнітами виконують за допомогою вищезазначених підйомних механізмів, а підйом всього пристрою для транспортування і кантівки слябів виконують за допомогою механізму головного підйому мостового крана. Між заявленою корисною моделлю і отриманим технічним результатом існує причиннонаслідковий зв'язок. Тільки завдяки тому, що пристрій транспортування і кантування слябів додатково забезпечений рухомими балками з вушками, встановленими в вертикальних напрямних рами, а вантажопідйомні магніти закріплені за допомогою ланцюгів у вушках вищезазначених рухомих балок, крім того, кожна рухома балка додатково забезпечена підйомними механізмами, наприклад, у вигляді закріплених на рамі трьох мотор - редукторів і передач "гвинт-гайка", при цьому підйом кожної рухомої балки з вантажопідйомними магнітами виконують за допомогою вищезазначених підйомних механізмів, а підйом всього пристрою для транспортування і кантування слябів виконують за допомогою механізму головного підйому мостового крана, забезпечено незалежну роботу групових електромагнітних захоплювачів та скорочення часу кантування сляба, підвищена ефективність і надійність його роботи. Вказаний технічний результат неможливо отримати, якщо з приведеної сукупності істотних ознак виключити будь-яку. Корисна модель є новою, оскільки в технічній і патентній літературі не виявлено пристрою для транспортування і кантування слябів з перерахованою вище сукупністю відмітних ознак. 1 UA 88536 U 5 10 15 20 25 30 35 40 45 50 55 Заявлена корисна модель є промислово застосовною, оскільки її технічна реалізація не представляє трудності, а на ПАТ "НКМЗ" розроблений технічний проект і виготовлений пристрій для транспортування і кантування слябів з використанням вищезазначеного технічного рішення. Корисна модель пояснюється кресленнями, де на: - фіг. 1 - приведений загальний вид пристрою транспортування і кантування слябів (мостовий кран з механізмом підйому умовно не показаний); - фіг. 2 - вид А; - фіг. 2 - вид Б; - фіг. 4 - 10 - наведена схема кантування і кантування сляба Пристрій транспортування і кантування слябів (див. фіг. 1 і 2) складається з металоконструкції у вигляді рами 1 з канатними блоками 2, вертикальними напрямними 3 та вантажними електромагнітами 4. Рама 1 за допомогою канатних блоків 2 підвішена на канатах 5 механізму підйому кранового візка мостового крана (на фіг. 1 і 2 умовно не показані). До відмінних особливостей заявленої корисної моделі (див. фіг. 3) слід віднести те, що: - у вертикальних напрямних 3 рами 1 встановлені рухомі балки 6 і 7. Рухомі балки 6 і 7 оснащені вушками 8 і 9; - вантажопідйомні електромагніти 4 закріплені за допомогою підвісок 10 і гнучких зв'язків ланцюгів 11 до вушок 8 і 9 відповідних рухомих балок 6 та 7, утворюючи при цьому групові електромагнітні захоплювачі 12 і 13, які мають по вісім вантажних електромагнітів 4. Кількість вантажних електромагнітів 4 розраховують у відповідності до ваги слябів, що транспортуються. Електромагнітні захоплювачі 12 і 13 рухаються разом з відповідними рухомими балками 6 і 7 та забезпечені окремими незалежними системами керування і електроживлення. - рухомі балки 4 і 5 додатково забезпечені підйомними механізмами 14 та 15. Кожен підйомний механізм 14 або 15 виконаний у вигляді закріплених на вертикальних напрямних 3 рами 1 пристрою для транспортування і кантування слябів трьох мотор-редукторів 16 та взаємодіючих з ними гвинта 17 та гайки 18 передач "гвинт-гайка", змонтованих на відповідних рухомих балках 6 і 7, - кожен вантажопідйомний електромагніт 4 встановлений у підвісці 10 із забезпеченням вільного обертання навколо його горизонтальної осі. - підйом рухомих балок 6 і 7 з груповим електромагнітним захоплювачами 12 і 13 виконують за допомогою підйомних механізмів 14 і 15. - підйом та переміщення всього пристрою для транспортування і кантування слябів виконують за допомогою механізмів мостового крана. Працює заявлений пристрій транспортування і кантування слябів таким чином. Переміщення пристрою транспортування і кантування слябів до місця захоплення сляба 19, а також переміщення в горизонтальній площині підіймання і опускання виконують за допомогою механізмів мостового крана. Для простого переміщення сляба пристрій транспортування і кантування слябів за допомогою мостового крана подається до сляба 16. Далі за допомогою механізму підйому мостового крана пристрій опускають до вкладання електромагнітів 4 на поверхні сляба 19. Вмикають електрострум, електромагніти 4 захоплюють сляб 19 ("прилипають" до нього). Далі, за допомогою механізмів мостового крана пристрій для транспортування і кантування слябів разом із слябом 19 переміщують у потрібне місце, де виконують укладання сляба. Для виконання операцій з кантування сляба 19 виконують нижче перелічені дії (див. фиг.410) За допомогою механізмів мостового крана пристрій для транспортування і кантування слябів установлюють над слябом таким чином, що вантажопідйомні електромагніти 4 електромагнітного захоплювача 13 розташовані на невеликій висоті, біля одного із країв сляба 19. За допомогою підйомного механізму 15 опускають вниз рухому балку 7 і укладають вантажні електромагніти 4 електромагнітного захоплювача 13 робочими поверхнями на край верхньої площини сляба 19. Вмикають вантажні електромагніти 4 електромагнітного захоплювача 13 і за допомогою механізму підйому мостового крана піднімають пристрій для транспортування і кантування слябів угору. Вантажопідйомні електромагніти, утримуючи край сляба 19, повертаються у шарнірах підвісок 10 та піднімають сляб 16 угору до вертикального положення. Далі за допомогою підйомного механізму 14 опускають рухому балку 6 та вантажопідйомні магніти 4 електромагнітного захоплювача 12 вниз, до рівня вантажних електромагнітів електромагнітного захоплювача 13. Вантажопідйомні електромагніти електромагнітного 2 UA 88536 U 5 10 15 20 25 30 35 захоплювача 12, опускаючись вниз, повертаються в шарнірах підвісок 10, при цьому їх робочі поверхні розташовуються паралельно до нижньої поверхні сляба 19. Далі вмикають електромагніти електромагнітного захоплювача 12 і його вантажні електромагніти захоплюють сляб за нижню поверхню сляба 16. Після цього вимикають вантажні електромагніти електромагнітного захоплювача 13 і за допомогою підйомного механізму 15 піднімають рухому балку 7 та вантажопідйомні магніти електромагнітного захоплювача 13 у верхнє положення, над боковою поверхнею сляба 19. Далі, за допомогою механізму ходу переміщують мостовий кран разом з пристроєм для транспортування і кантування слябів та нахиляють сляб 19 у сторону (по напряму, вказаному стрілкою). За допомогою механізму підйому мостового крану опускають пристрій для транспортування і кантування слябів разом з вантажними магнітами електромагнітного захоплювача 13 та вкладають сляб 19 на верхню поверхню. Можливо також транспортування слябів у вертикальному положенні коли вантажні магніти закріплені на верхній та нижній поверхнях сляба. Виконання пристрою для транспортування і кантування слябів у відповідності до заявленої корисної моделі дозволило виконувати операції по транспортуванню та кантуванню слябів, скоротило час на виконання операцій. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Пристрій транспортування і кантування слябів, що містить підвішену на канатах візка механізму головного підйому мостового крана за допомогою канатних блоків раму, забезпечену вертикальними напрямними і вантажопідйомними електромагнітами, який відрізняється тим, що пристрій додатково забезпечений, наприклад двома, рухомими балками з вушками, встановленими в вертикальних напрямних рами, а вантажопідйомні магніти утворюють окремі групові електромагнітні захоплювачі, наприклад два, забезпечені окремими системами керування і електроживлення і закріплені за допомогою підвісок з гнучкими зв'язками, наприклад ланцюгами, закріпленими в вушках вищезазначених рухомих балок. 2. Пристрій транспортування і кантування слябів за п. 1, який відрізняється тим, що кожна рухома балка додатково забезпечена підйомними механізмами, наприклад, у вигляді закріплених на рамі пристрою трьох мотор-редукторів і взаємодіючих з ними передач "гвинтгайка", змонтованих на рухомій балці, а кожен електромагніт встановлений в підвісці із забезпеченням вільного обертання в горизонтальній площині, при цьому підйом кожної рухомої балки з груповим електромагнітним заходами виконують за допомогою вищезазначених підйомних механізмів, а підйом та переміщення всього пристрою для транспортування і кантування слябів виконують за допомогою механізмів мостового крана. 3 UA 88536 U 4 UA 88536 U 5 UA 88536 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюDzerzhynskyi Vitalii Oleksandrovych, Shelestov Ivan Andriiovych, Plaksii Oleksandr Hryhorovych
Автори російськоюДзержинский Виталий Александрович, Шелестов Иван Андреевич, Плаксий Александр Григорьевич
МПК / Мітки
МПК: B66C 17/00
Мітки: транспортування, слябів, пристрій, кантування
Код посилання
<a href="https://ua.patents.su/8-88536-pristrijj-dlya-transportuvannya-i-kantuvannya-slyabiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для транспортування і кантування слябів</a>
Вантажозахоплювальний пристрій для транспортування і кантування зливків
Номер патенту: 34683
Опубліковано: 26.08.2008
Автори: Шканов Олег Юхимович, Шабалдак Микола Васильович
МПК: B66C 1/42
Мітки: зливків, кантування, вантажозахоплювальний, пристрій, транспортування
Формула / Реферат:
Вантажозахоплювальний пристрій для транспортування і кантування зливків, що включає опорне кільце, на зовнішній бічній поверхні якого, у пазах, шарнірно закріплені ексцентрикові кулачки, з'єднані з парою гакових тяг, який відрізняється тим, що опорне кільце виконане у вигляді зрізаного конуса, а гакові тяги виконані жорсткими по всій довжині і на нижній ділянці кожної гакової тяги, із зовнішньої сторони, консольно, паралельно закріплені дві...
Пристрій для очищення слябів
Номер патенту: 52534
Опубліковано: 25.08.2010
Автор: Кашанський Дмитро Анатолійович
МПК: B08B 1/02, B21B 45/04
Мітки: слябів, очищення, пристрій
Формула / Реферат:
Пристрій для очищення слябів, що містить встановлений у корпусі з можливістю хитання очисний інструмент, зв'язаний із приводом його обертання, і механізм притиску очисного інструмента до сляба, що виконаний у вигляді двоплечого важеля, на одному кінці якого закріплений очисний інструмент, а другий кінець зазначеного важеля кінематично з'єднаний з гідроциліндром за допомогою тяги, який відрізняється тим, що він оснащений контрвантажем, що...
Захватний пристрій для транспортування і кантування ланок рейкошпальної решітки
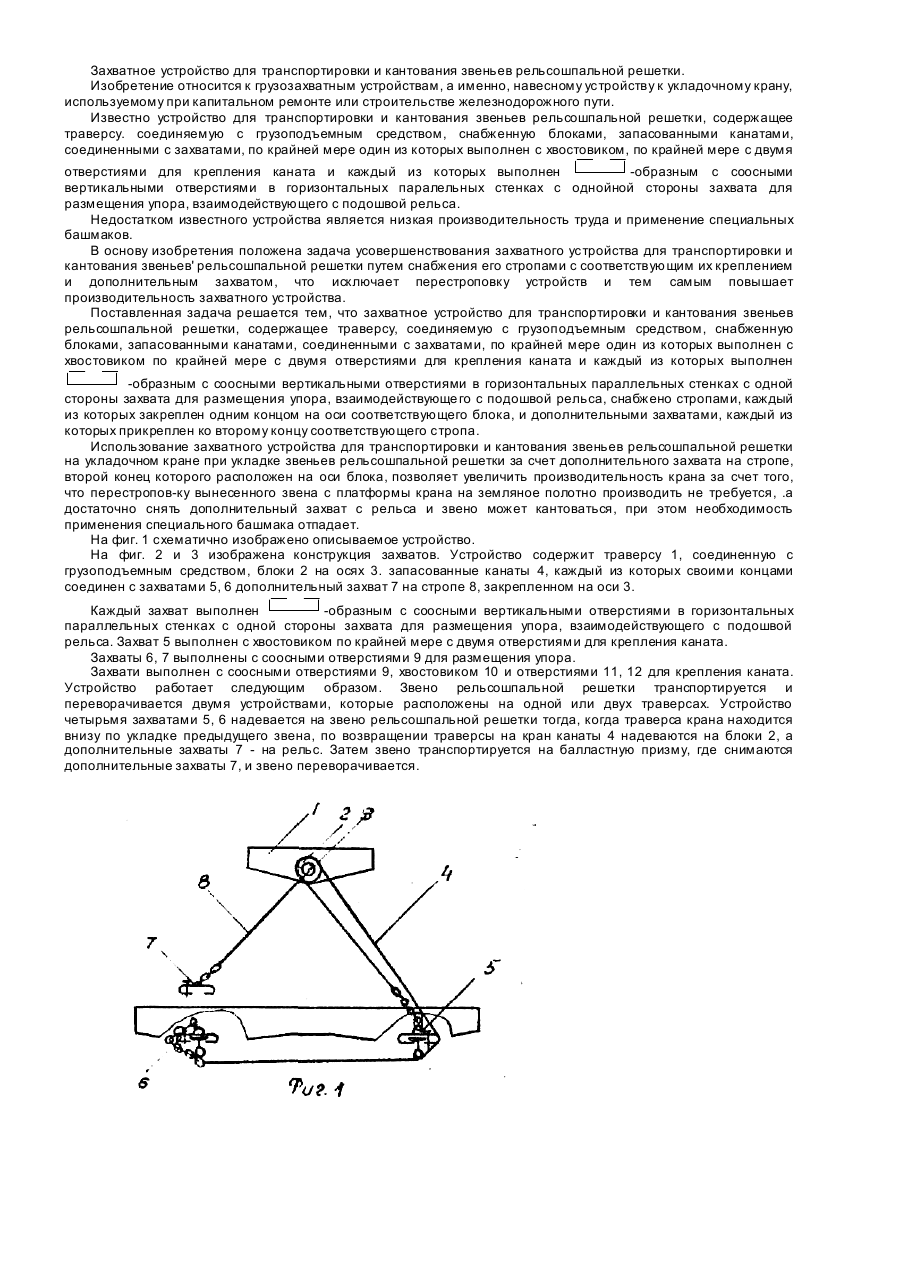
Номер патенту: 3798
Опубліковано: 27.12.1994
Автор: Лазоренко Микола Семенович
МПК: B66C 1/10
Мітки: пристрій, ланок, кантування, решітки, рейкошпальної, захватний, транспортування
Формула / Реферат:
Захватное устройство для транспортировки и кантования звеньев рельсошпальной решетки, содержащее траверсу, соединяемую с грузоподъемным средством, снабженную блоками, запакованными канатами, соединенными с захватами, по крайней мере один из которых выполнен с хвостовиком по крайней мере с двумя отверстиями для крепления каната и каждый из которых выполнен -образным с...
Пристрій безаварійної видачі слябів
Номер патенту: 15239
Опубліковано: 15.06.2006
Автори: Дурнів Сергій Олександрович, Безчерев Олександр Сергійович, Негрій Василь Якович, Пушков Валерій Васильович
МПК: F27D 3/00
Мітки: пристрій, видачі, безаварійної, слябів
Формула / Реферат:
Пристрій безаварійної видачі слябів, що складається з металевої рами, який відрізняється тим, що рама виконана порожнистою, водоохолоджувальною, П-подібної форми з ребрами жорсткості всередині із труби діаметром 168х28 мм сталі марки 12х1МФ, та встановлена безпосередньо усередині нагрівальної печі.
Пристрій для кантування
Номер патенту: 79871
Опубліковано: 13.05.2013
Автор: Немировський Олександр Ісакович
МПК: B23K 37/00
Мітки: кантування, пристрій
Формула / Реферат:
1. Пристрій для кантування, що містить два стояки, механізми підйому та опускання виробу, механізм повороту виробу і затискачі виробу, який відрізняється тим, що пристрій має захвати для кріплення виробу, кожен з яких містить корпус, нерухомо сполучений з валом механізму повороту виробу, затискачі, шарнірно приєднані до корпусу з можливістю охоплення виробу зверху і знизу, фіксатори, які фіксують затискачі при приведенні їх до робочого...
Попередній патент: Мікрохвильова інтегрована телерадіоінформаційна система “мітріс-т2″
Наступний патент: Сталерозливний стенд
Випадковий патент: Пристрій регулювання для системи опалення приміщень