Монолітний диференціальний датчик вібрації
Номер патенту: 90671
Опубліковано: 25.05.2010
Автори: Мюллєр Серж, Лє Траон Олів'є, Перніс Марк, Жаньйо Дені, Лєкорр Бернар


Формула / Реферат
1. Монолітний диференціальний датчик вібрації, виготовлений з плоскої пластини, який містить два ідентичні елементи вібрації, що функціонують у диференційному режимі із загальною робочою частотою і з'єднані між собою механічним пристроєм, симетричним відносно осі, перпендикулярної до пластини, яка містить рамку і дві сполучні перемички, кожна з яких підтримує елемент вібрації, який відрізняється тим, що рамка утворена з послідовності масивних і витончених частин і її розміри вибрані із використанням теоретичної моделі вібраційної поведінки рамки так, щоб частота моди структурного резонансу рамки була максимально близькою до загальної робочої частоти, а кожна зі сполучних перемичок розташована у вузлі вібрації рамки на загальній робочій частоті, при цьому механічний пристрій не має площини симетрії, яку перетинає перпендикулярна вісь.
2. Датчик за п. 1, який відрізняється тим, що обидві витончені частини (11 і 12, 13 і 14), розташовані відповідно з одного та з іншого боків від кожної з обох сполучних перемичок (71, 72) і найближчих до вказаної сполучної перемички зон, мають механічну гнучкість, яка суттєво відрізняється одна від одної.
3. Датчик за будь-яким із пп. 1 або 2, який відрізняється тим, що рамка (DM') охоплює два вібраційні елементи (ТА'1, ТА'2).
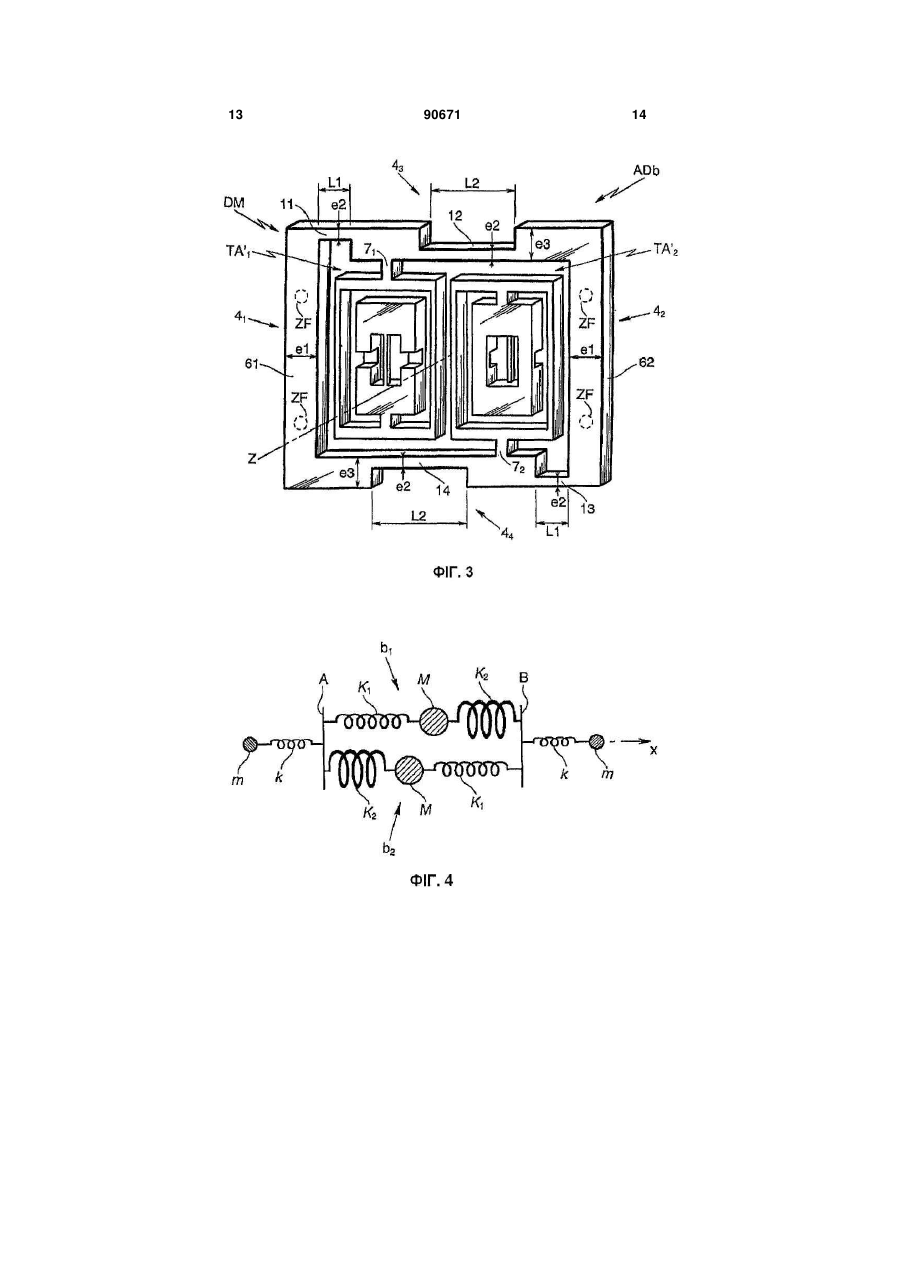
4. Датчик за пп. 1, 2, який відрізняється тим, що рамка (DM') має чотири сторони (41, 42, 43, 44), з'єднані у вигляді прямокутника, дві (43, 44) із вказаних сторін розташовані одна навпроти іншої і з'єднані кожна з відповідною сполучною перемичкою (71, 72), причому кожна із сторін має дві витончені частини (11 і 12, 13 і 14), розташовані відповідно з одного і з іншого боків від кожної з двох сполучних перемичок.
5. Датчик за п. 4, який відрізняється тим, що витончені частини (11, 12, 13, 14) обох сторін (43, 44) мають величину перерізу (е2), виміряну у площині рамки (DM'), яку визначають діапазоном від чверті до половини величини перерізу (е3) невитончених частин вказаних сторін.
6. Датчик за п. 5, який відрізняється тим, що обидві витончені частини (11 і 12, 13 і 14), розташовані відповідно з одного і з іншого боків кожної з двох сполучних перемичок (71, 72) і найближчих до вказаних сполучних перемичок зон, мають довжини (L1, L2), які значно відрізняються одна від одної, причому найбільша довжина (L2) у 2-10 разів перевищує іншу довжину (L1).
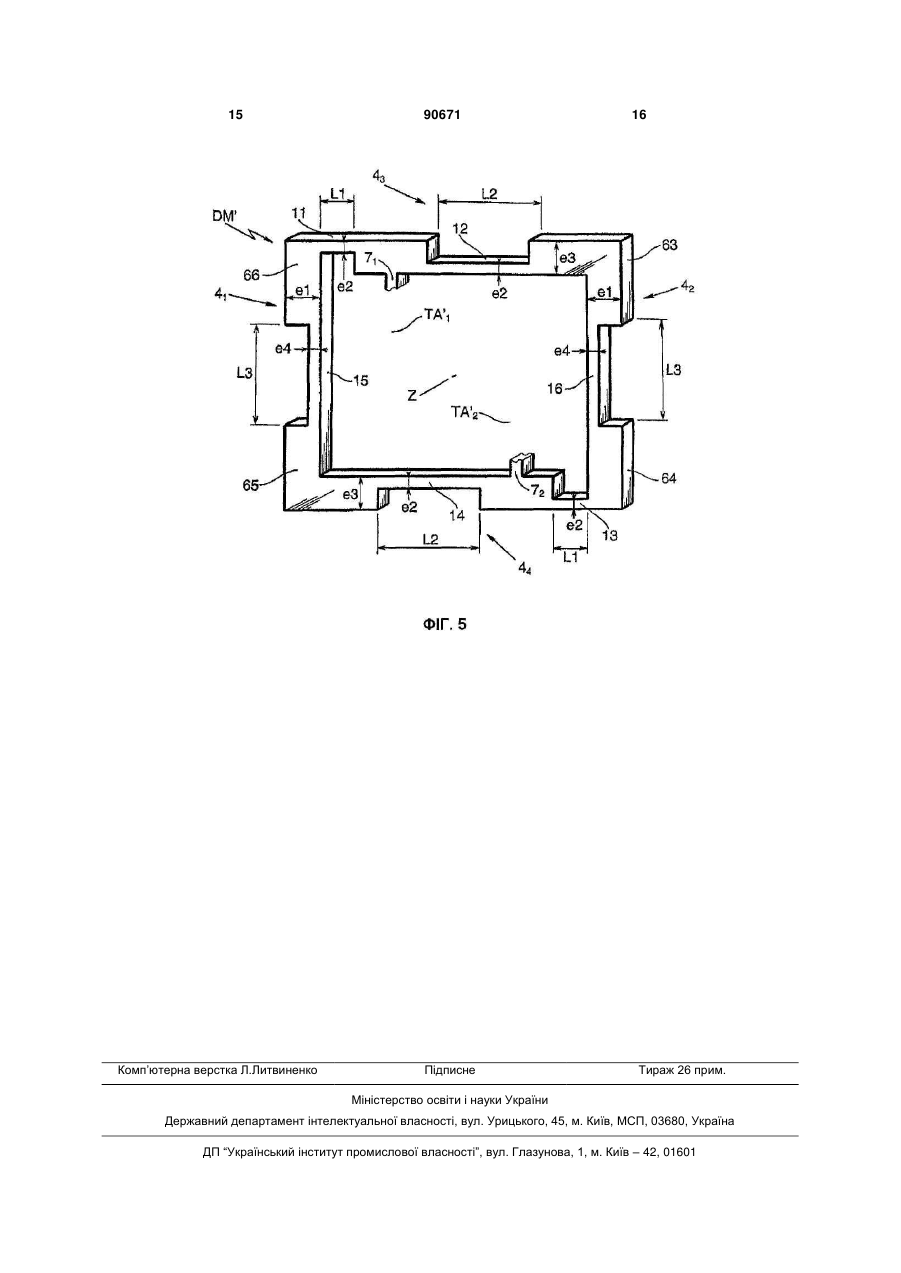
7. Датчик за п. 6, який відрізняється тим, що дві інші сторони (41, 42) мають витончені частини (15, 16), величина перерізу (е4) яких, виміряна у площині рамки (DM'), складає від чверті до половини величини перерізу (е1) невитончених частин вказаних сторін.
8. Датчик за п. 7, який відрізняється тим, що довжина (L3) витончених частин (15, 16) двох інших сторін (41, 42) складає від половинної до двох довжин (L2) найдовшої (12, 14) з двох витончених частин, розташованих відповідно з одного і з другого боків кожної з двох сполучних перемичок (71, 72) і найближчих до вказаних сполучних перемичок зон.
Текст
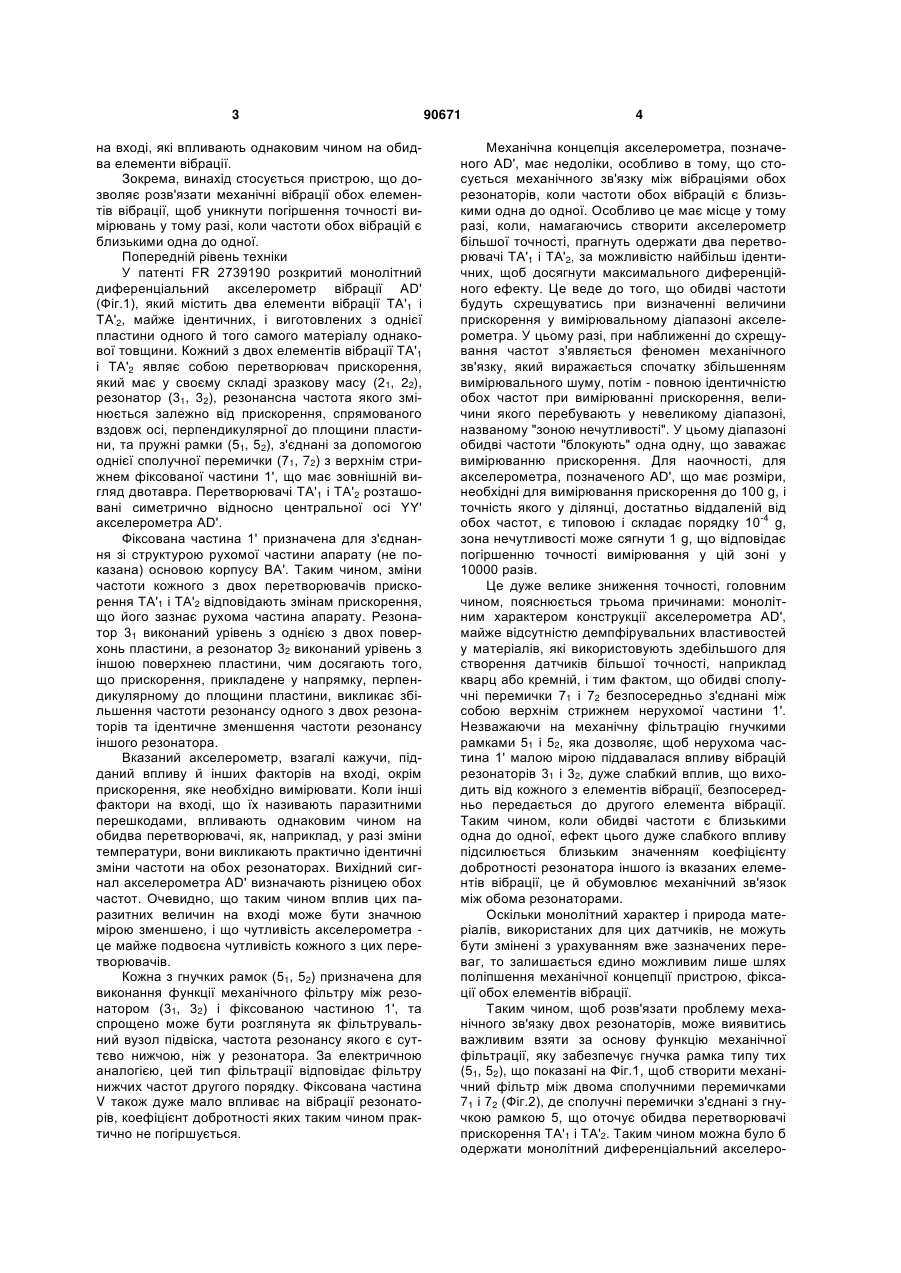
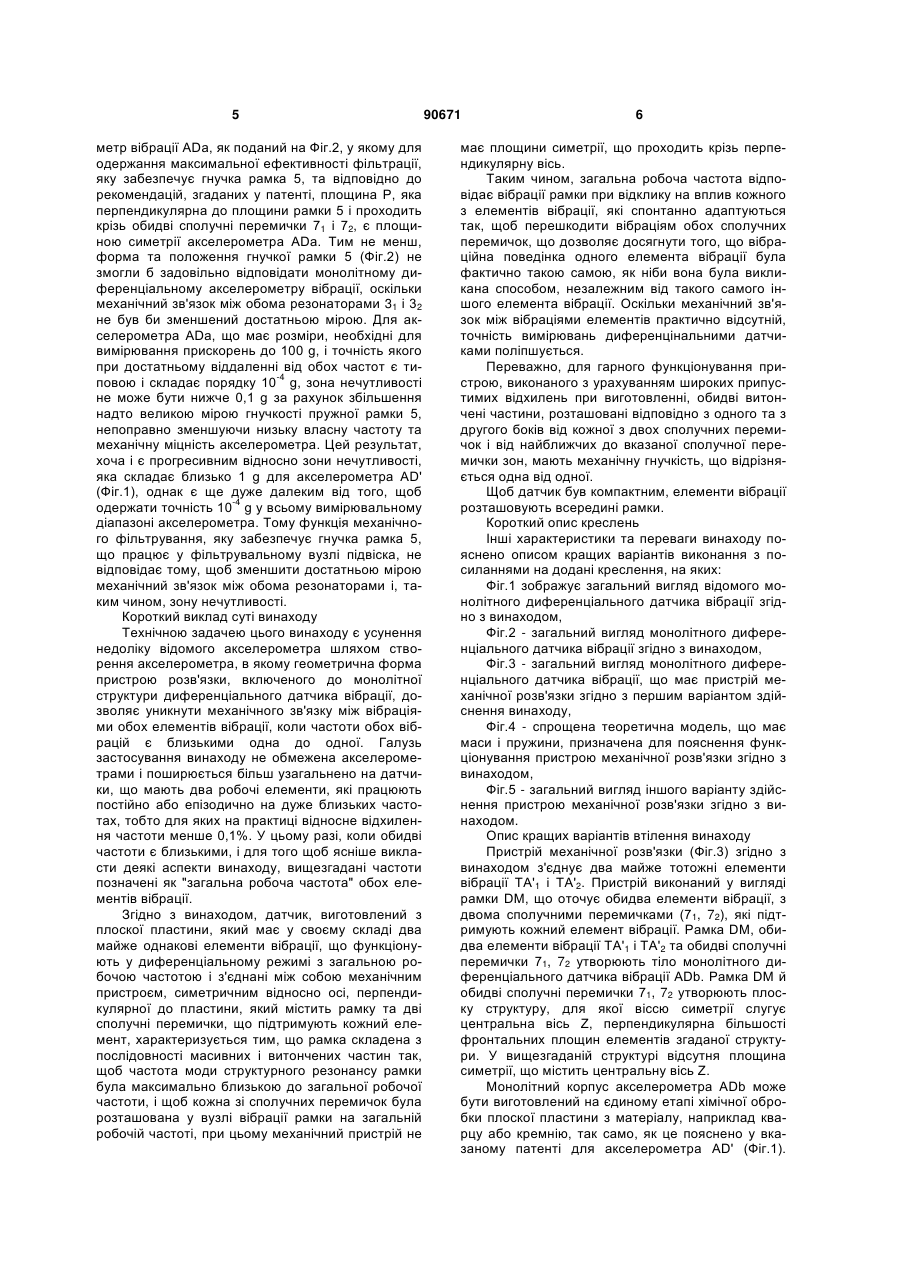
1. Монолітний диференціальний датчик вібрації, виготовлений з плоскої пластини, який містить два ідентичні елементи вібрації, що функціонують у диференційному режимі із загальною робочою частотою і з'єднані між собою механічним пристроєм, симетричним відносно осі, перпендикулярної до пластини, яка містить рамку і дві сполучні перемички, кожна з яких підтримує елемент вібрації, який відрізняється тим, що рамка утворена з послідовності масивних і витончених частин і її розміри вибрані із використанням теоретичної моделі вібраційної поведінки рамки так, щоб частота моди структурного резонансу рамки була максимально близькою до загальної робочої частоти, а кожна зі сполучних перемичок розташована у вузлі вібрації рамки на загальній робочій частоті, при цьому механічний пристрій не має площини симетрії, яку перетинає перпендикулярна вісь. 2. Датчик за п. 1, який відрізняється тим, що обидві витончені частини (11 і 12, 13 і 14), розташовані відповідно з одного та з іншого боків від кожної з обох сполучних перемичок (71, 72) і найближчих до вказаної сполучної перемички зон, мають механічну гнучкість, яка суттєво відрізняється одна від одної. C2 2 (19) 1 3 на вході, які впливають однаковим чином на обидва елементи вібрації. Зокрема, винахід стосується пристрою, що дозволяє розв'язати механічні вібрації обох елементів вібрації, щоб уникнути погіршення точності вимірювань у тому разі, коли частоти обох вібрацій є близькими одна до одної. Попередній рівень техніки У патенті FR 2739190 розкритий монолітний диференціальний акселерометр вібрації AD' (Фіг.1), який містить два елементи вібрації ΤΑ'1 і ТА'2, майже ідентичних, і виготовлених з однієї пластини одного й того самого матеріалу однакової товщини. Кожний з двох елементів вібрації ΤΑ'1 і ТА'2 являє собою перетворювач прискорення, який має у своєму складі зразкову масу (21, 22), резонатор (31, 32), резонансна частота якого змінюється залежно від прискорення, спрямованого вздовж осі, перпендикулярної до площини пластини, та пружні рамки (51, 52), з'єднані за допомогою однієї сполучної перемички (71, 72) з верхнім стрижнем фіксованої частини 1', що має зовнішній вигляд двотавра. Перетворювачі ΤΑ'1 і ТА'2 розташовані симетрично відносно центральної осі ΥΥ' акселерометра AD'. Фіксована частина 1' призначена для з'єднання зі структурою рухомої частини апарату (не показана) основою корпусу ВА'. Таким чином, зміни частоти кожного з двох перетворювачів прискорення ΤΑ'1 і ТА'2 відповідають змінам прискорення, що його зазнає рухома частина апарату. Резонатор 31 виконаний урівень з однією з двох поверхонь пластини, а резонатор 32 виконаний урівень з іншою поверхнею пластини, чим досягають того, що прискорення, прикладене у напрямку, перпендикулярному до площини пластини, викликає збільшення частоти резонансу одного з двох резонаторів та ідентичне зменшення частоти резонансу іншого резонатора. Вказаний акселерометр, взагалі кажучи, підданий впливу й інших факторів на вході, окрім прискорення, яке необхідно вимірювати. Коли інші фактори на вході, що їх називають паразитними перешкодами, впливають однаковим чином на обидва перетворювачі, як, наприклад, у разі зміни температури, вони викликають практично ідентичні зміни частоти на обох резонаторах. Вихідний сигнал акселерометра AD' визначають різницею обох частот. Очевидно, що таким чином вплив цих паразитних величин на вході може бути значною мірою зменшено, і що чутливість акселерометра це майже подвоєна чутливість кожного з цих перетворювачів. Кожна з гнучких рамок (51, 52) призначена для виконання функції механічного фільтру між резонатором (31, 32) і фіксованою частиною 1', та спрощено може бути розглянута як фільтрувальний вузол підвіска, частота резонансу якого є суттєво нижчою, ніж у резонатора. За електричною аналогією, цей тип фільтрації відповідає фільтру нижчих частот другого порядку. Фіксована частина V також дуже мало впливає на вібрації резонаторів, коефіцієнт добротності яких таким чином практично не погіршується. 90671 4 Механічна концепція акселерометра, позначеного AD', має недоліки, особливо в тому, що стосується механічного зв'язку між вібраціями обох резонаторів, коли частоти обох вібрацій є близькими одна до одної. Особливо це має місце у тому разі, коли, намагаючись створити акселерометр більшої точності, прагнуть одержати два перетворювачі ΤΑ'1 і ТА'2, за можливістю найбільш ідентичних, щоб досягнути максимального диференційного ефекту. Це веде до того, що обидві частоти будуть схрещуватись при визначенні величини прискорення у вимірювальному діапазоні акселерометра. У цьому разі, при наближенні до схрещування частот з'являється феномен механічного зв'язку, який виражається спочатку збільшенням вимірювального шуму, потім - повною ідентичністю обох частот при вимірюванні прискорення, величини якого перебувають у невеликому діапазоні, названому "зоною нечутливості". У цьому діапазоні обидві частоти "блокують" одна одну, що заважає вимірюванню прискорення. Для наочності, для акселерометра, позначеного AD', що має розміри, необхідні для вимірювання прискорення до 100 g, і точність якого у ділянці, достатньо віддаленій від обох частот, є типовою і складає порядку 10-4 g, зона нечутливості може сягнути 1 g, що відповідає погіршенню точності вимірювання у цій зоні у 10000 разів. Це дуже велике зниження точності, головним чином, пояснюється трьома причинами: монолітним характером конструкції акселерометра AD', майже відсутністю демпфірувальних властивостей у матеріалів, які використовують здебільшого для створення датчиків більшої точності, наприклад кварц або кремній, і тим фактом, що обидві сполучні перемички 71 і 72 безпосередньо з'єднані між собою верхнім стрижнем нерухомої частини 1'. Незважаючи на механічну фільтрацію гнучкими рамками 51 і 52, яка дозволяє, щоб нерухома частина 1' малою мірою піддавалася впливу вібрацій резонаторів 31 і 32, дуже слабкий вплив, що виходить від кожного з елементів вібрації, безпосередньо передається до другого елемента вібрації. Таким чином, коли обидві частоти є близькими одна до одної, ефект цього дуже слабкого впливу підсилюється близьким значенням коефіцієнту добротності резонатора іншого із вказаних елементів вібрації, це й обумовлює механічний зв'язок між обома резонаторами. Оскільки монолітний характер і природа матеріалів, використаних для цих датчиків, не можуть бути змінені з урахуванням вже зазначених переваг, то залишається єдино можливим лише шлях поліпшення механічної концепції пристрою, фіксації обох елементів вібрації. Таким чином, щоб розв'язати проблему механічного зв'язку двох резонаторів, може виявитись важливим взяти за основу функцію механічної фільтрації, яку забезпечує гнучка рамка типу тих (51, 52), що показані на Фіг.1, щоб створити механічний фільтр між двома сполучними перемичками 71 і 72 (Фіг.2), де сполучні перемички з'єднані з гнучкою рамкою 5, що оточує обидва перетворювачі прискорення ТА'1 і ТА'2. Таким чином можна було б одержати монолітний диференціальний акселеро 5 метр вібрації ADa, як поданий на Фіг.2, у якому для одержання максимальної ефективності фільтрації, яку забезпечує гнучка рамка 5, та відповідно до рекомендацій, згаданих у патенті, площина Р, яка перпендикулярна до площини рамки 5 і проходить крізь обидві сполучні перемички 71 і 72, є площиною симетрії акселерометра ADa. Тим не менш, форма та положення гнучкої рамки 5 (Фіг.2) не змогли б задовільно відповідати монолітному диференціальному акселерометру вібрації, оскільки механічний зв'язок між обома резонаторами 31 і 32 не був би зменшений достатньою мірою. Для акселерометра ADa, що має розміри, необхідні для вимірювання прискорень до 100 g, і точність якого при достатньому віддаленні від обох частот є типовою і складає порядку 10-4 g, зона нечутливості не може бути нижче 0,1 g за рахунок збільшення надто великою мірою гнучкості пружної рамки 5, непоправно зменшуючи низьку власну частоту та механічну міцність акселерометра. Цей результат, хоча і є прогресивним відносно зони нечутливості, яка складає близько 1 g для акселерометра AD' (Фіг.1), однак є ще дуже далеким від того, щоб одержати точність 10-4 g у всьому вимірювальному діапазоні акселерометра. Тому функція механічного фільтрування, яку забезпечує гнучка рамка 5, що працює у фільтрувальному вузлі підвіска, не відповідає тому, щоб зменшити достатньою мірою механічний зв'язок між обома резонаторами і, таким чином, зону нечутливості. Короткий виклад суті винаходу Технічною задачею цього винаходу є усунення недоліку відомого акселерометра шляхом створення акселерометра, в якому геометрична форма пристрою розв'язки, включеного до монолітної структури диференціального датчика вібрації, дозволяє уникнути механічного зв'язку між вібраціями обох елементів вібрації, коли частоти обох вібрацій є близькими одна до одної. Галузь застосування винаходу не обмежена акселерометрами і поширюється більш узагальнено на датчики, що мають два робочі елементи, які працюють постійно або епізодично на дуже близьких частотах, тобто для яких на практиці відносне відхилення частоти менше0,1%. У цьому разі, коли обидві частоти є близькими, і для того щоб ясніше викласти деякі аспекти винаходу, вищезгадані частоти позначені як "загальна робоча частота" обох елементів вібрації. Згідно з винаходом, датчик, виготовлений з плоскої пластини, який має у своєму складі два майже однакові елементи вібрації, що функціонують у диференціальному режимі з загальною робочою частотою і з'єднані між собою механічним пристроєм, симетричним відносно осі, перпендикулярної до пластини, який містить рамку та дві сполучні перемички, що підтримують кожний елемент, характеризується тим, що рамка складена з послідовності масивних і витончених частин так, щоб частота моди структурного резонансу рамки була максимально близькою до загальної робочої частоти, і щоб кожна зі сполучних перемичок була розташована у вузлі вібрації рамки на загальній робочій частоті, при цьому механічний пристрій не 90671 6 має площини симетрії, що проходить крізь перпендикулярну вісь. Таким чином, загальна робоча частота відповідає вібрації рамки при відклику на вплив кожного з елементів вібрації, які спонтанно адаптуються так, щоб перешкодити вібраціям обох сполучних перемичок, що дозволяє досягнути того, що вібраційна поведінка одного елемента вібрації була фактично такою самою, як ніби вона була викликана способом, незалежним від такого самого іншого елемента вібрації. Оскільки механічний зв'язок між вібраціями елементів практично відсутній, точність вимірювань диференцінальними датчиками поліпшується. Переважно, для гарного функціонування пристрою, виконаного з урахуванням широких припустимих відхилень при виготовленні, обидві витончені частини, розташовані відповідно з одного та з другого боків від кожної з двох сполучних перемичок і від найближчих до вказаної сполучної перемички зон, мають механічну гнучкість, що відрізняється одна від одної. Щоб датчик був компактним, елементи вібрації розташовують всередині рамки. Короткий опис креслень Інші характеристики та переваги винаходу пояснено описом кращих варіантів виконання з посиланнями на додані креслення, на яких: Фіг.1 зображує загальний вигляд відомого монолітного диференціального датчика вібрації згідно з винаходом, Фіг.2 - загальний вигляд монолітного диференціального датчика вібрації згідно з винаходом, Фіг.3 - загальний вигляд монолітного диференціального датчика вібрації, що має пристрій механічної розв'язки згідно з першим варіантом здійснення винаходу, Фіг.4 - спрощена теоретична модель, що має маси і пружини, призначена для пояснення функціонування пристрою механічної розв'язки згідно з винаходом, Фіг.5 - загальний вигляд іншого варіанту здійснення пристрою механічної розв'язки згідно з винаходом. Опис кращих варіантів втілення винаходу Пристрій механічної розв'язки (Фіг.3) згідно з винаходом з'єднує два майже тотожні елементи вібрації ΤΑ'1 і ТА'2. Пристрій виконаний у вигляді рамки DM, що оточує обидва елементи вібрації, з двома сполучними перемичками (71, 72), які підтримують кожний елемент вібрації. Рамка DM, обидва елементи вібрації ΤΑ'1 і ТА'2 та обидві сполучні перемички 71, 72 утворюють тіло монолітного диференціального датчика вібрації ADb. Рамка DM й обидві сполучні перемички 71, 72 утворюють плоску структуру, для якої віссю симетрії слугує центральна вісь Z, перпендикулярна більшості фронтальних площин елементів згаданої структури. У вищезгаданій структурі відсутня площина симетрії, що містить центральну вісь Ζ. Монолітний корпус акселерометра ADb може бути виготовлений на єдиному етапі хімічної обробки плоскої пластини з матеріалу, наприклад кварцу або кремнію, так само, як це пояснено у вказаному патенті для акселерометра AD' (Фіг.1). 7 Щодо структур, запропонованих у цьому винаході, то хімічна обробка не дозволяє точно виконати форми різних складових елементів. Спеціалістові в цій галузі техніки ясно, що ця неточність має бути врахована при інтерпретації деяких описових термінів, наприклад, товщина елементів або симетрія структури. Рамка AD загальної прямокутної форми має чотири сторони 41, 42, 43 і 44. Сторони 43 і 44 розташовані одна навпроти іншої і кожна з них з'єднана зі сполучною перемичкою (71, 72). Сторони 41, 42 мають величину перетину (е1), виміряну у площині рамки (DM). Величина перетину по довжині двох інших сторін 43 і 44 не є постійною, оскільки з них видаляють матеріал, щоб одержувати витончені частини (11, 12, 13, 14), величина перетину яких е2 є істотно меншою за величину перетину е3 невитончених частин вказаних сторін. В описуваному варіанті розмір е2 дорівнює приблизно третині розміру е3. Розмір е2 визначають діапазоном від чверті до половини величини перетину (е3). Кожна зі сторін 43 і 44 має у своєму складі витончену частину (11, 13) довжиною L1, розташовану з одного боку від сполучної перемички (71, 72), з якою вона з'єднана, та витончену частину (12, 14) довжиною L2, істотно більшою за L1, розташовану з іншого боку від сполучної перемички. Розмір L2 приблизно втричі більший за розмір L1. Величина відношення розмірів L2 і L1 перебуває у діапазоні від двох до десяти. Таким чином, витончені частини 12 і 14 довжиною L2 є, очевидно, більш гнучкими, ніж витончені частини 11 і 13 довжиною L1. Ця різниця у гнучкості, яка становить характеристику пристрою згідно з винаходом, може бути одержана інакше, ніж лише за рахунок різниці у довжинах L1 і L2. Так, величина перетину більш тонких частин 11 і 13 може відрізнятись від величини перетину частин 12 і 14. Кожна зі сторін 41, 42 перетином е1 завжди з'єднана з невитонченою частиною однієї з двох сторін 44 і 43 перетином е3 і утворює з нею масивну частину (61, 62). Таким чином, рамка DM може бути представлена складеною з послідовності двох масивних частин (61, 62) і чотирьох витончених частин (11, 12, 13, 14), розташованих так, щоб кожна зі вказаних масивних частин з'єднувалась з кожною з двох сполучних перемичок за допомогою витонченої частини. Акселерометр ADb фіксується на основі корпусу (не показаний), наприклад склеюванням, на рівнях чотирьох маленьких круглих зон ZF (показані пунктиром на Фіг.3) розташованих на одній з поверхонь рамки DM на рівнях масивних частин 61 і 62. Ці чотири зони фіксації ZF забезпечують, щоб конструкція акселерометра ADb була досить жорсткою у вимірювальній смузі пропускання, звичайно порядку 1000 Гц, і досить гнучкою, щоб не перешкоджати реалізації моди структурного резонансу рамки DM на частоті, близькій до загальної робочої частоти обох елементів вібрації, близько 50000 Гц, що не могло бути досягнуто, якби вся сукупність елементів рамки DM була зафіксована на основі корпусу. 90671 8 Рамка DM має розміри, що забезпечують наявність моди структурного резонансу на загальній робочій частоті, щоб на рівні кожної зі сполучних перемичок 71 і 72 був вузол структурного резонансу рамки. Розрахунок цих розмірів може бути виконаний на підставі теоретичної моделі вібраційної поведінки рамки, наприклад тривимірної моделі з кінцевими елементами. Переважно, відносне відхилення між частотою структурного резонансу рамки і загальною робочою частотою обох елементів вібрації є нижче 5%. Функціонування пристрою механічної розв'язки згідно з винаходом представлено на Фіг.4, де показана спрощена теоретична модель з віссю вібрації х та складена з мас і пружин, які дозволяють імітувати вібраційну механічну поведінку акселерометра ADb. Дві сукупності, кожна складена з маси m і жорсткості k, являють собою два елементи вібрації ΤΑ'1 і ТА'2, загальну робочу частоту яких Fo записують як: 1 k 2 m Кожна із вказаних сукупностей з'єднана на рівнях (А, В) на осі x з двома гілками b1 і b2, кожна з яких складена з маси Μ і двох жорсткостей K1 і K2. Рівні Α і В являють собою сполучні перемички 71 і 72 відповідно, а гілки b1 і b2 являють собою рамку DM, для якої масивні частини 61 і 62 представлені двома масами М, витончені частини 12 і 14 представлені двома жорсткостями Κ1 та витончені сторони 11 і 13 представлені двома жорсткостями K2 з величиною, істотно більшою за Κ1. Модель маси-пружини на Фіг.4 представляє деякі важливі аспекти механічної конфігурації структури, утвореної рамкою DM та обома сполучними перемичками 71 і 72, особливо у тому, що стосується різниці у гнучкості витончених частин 12, 14 і витончених частин 11, 13, де фактично кожна з масивних частин з'єднана з кожною з обох сполучних перемичок за допомогою витонченої частини, є симетричною відносно центральної осі Ζ і не симетричною відносно площини, що проходить крізь вісь Ζ. Щоб обидві гілки b1 і b2 моделі маси-пружини, подані на Фіг.4, дозволили імітувати механічну поведінку рамки DM, додатково потрібно, щоб маси Μ і жорсткості K1 і K2 були вибрані такими, щоб частота Fb резонансу гілок b1 і b2, що враховує умови закладення на рівнях Α і В, дорівнювала загальній робочій частоті Fo: Fo 1 (K1 K 2 Fo 2 M В умовах такого вибору класичні рівняння, що описують динамічну рівновагу мас m і Μ, дозволяють показати, що при моделюванні реального випадку, коли рівні Α і В є вільними у своєму переміщенні, вібрація будь-якої однієї з двох сукупностей, складених кожна з маси m і коефіцієнту пружності k, викликає вібрації гілок b1 і b2, які спонтанно адаптуються таким чином, щоб підтримувати нерухомими рівні Α і В. Таким чином, кожний із вказаних вузлів вібрує так, як ніби він був закладений на нерухомих рівнях Α і В. Вібрації Fb 9 вказаних вузлів незалежні одна від іншої і, відповідно, механічний зв'язок між вібраціями відсутній. Класичні рівняння динамічної рівноваги мас m і Μ дозволяють показати, що відсутність механічного зв'язку між вищезгаданими вібраціями може бути досягнута лише якщо жорсткості K1 і K2 відрізняються одна від одної, при цьому для структури, утвореної рамкою DM та обома сполучними перемичками 71 і 72, необхідна відсутність симетрії відносно площини, що містить центральну вісь Ζ. Крім того, відсутність механічного зв'язку може бути одержана лише у тому разі, якщо кожний вузол, складений з маси m і жорсткості k, буде з'єднаний з одним із рівнів (А, В) двох гілок b1 і b2, що пояснює, чому кожний з обох елементів вібрації має бути з'єднаний з пристроєм механічної розв'язки згідно з винаходом за допомогою однієї сполучної перемички. За електричною аналогією, можливо розглядати функціонування пристрою згідно з винаходом подібно до функціонування загороджувального фільтру, який слугує для усунення електричного сигналу на конкретній частоті. Завдяки такому принципу функціонування ефективність пристрою механічної розв'язки згідно з винаходом може адаптуватись до власної високої частоти акселерометра ADb на відміну від запропонованого раніше акселерометра ADa, поданого на Фіг.2, для якого ефективність механічної фільтрації, яку продукує рамка 5, є тим більшою, чим є нижчою власна частота вказаної рамки, як це раніше пояснено аналогією з фільтром нижніх частот другого порядку. Таким чином, можливо реалізувати акселерометр ADb, який містить пристрій механічної розв'язки згідно з винаходом із розмірами, необхідними для вимірювань до 100 g, зона нечутливості якого нижче 10-4 g і найнижча власна частота якого складає близько 3000 Гц, що є достатнім для забезпечення необхідної міцності акселерометра. Спрощена теоретична модель дозволяє також зробити висновок, що стосується відхилень, що допускаються при виготовленні вказаного пристрою механічної розв'язки. На практиці бажано, щоб до вартості виготовлення диференціального датчика, що містить пристрій механічної розв'язки згідно з винаходом, не входила додана вартість, пов'язана зі складністю виготовлення пристрою з достатньою геометричною точністю, щоб одержати потрібну ефективність. Класичні рівняння, що описують динамічну рівновагу мас m і Μ для теоретичної моделі, представленої на Фіг.4, дозволяють показати, що відхилення, що допускаються при виготовленні пристрою, є пропорційними співвідношенню (K1 - K2)2 K1/K2. З цього випливає, що відхилення, що допускається при виготовленні, є тим більшим, чим більше відрізняються одна від одної жорсткості K1 і K2. Саме тому для варіанту пристрою механічної розв'язки, показаного на Фіг.3, витончені частини 12 і 14 значною мірою є більш гнучкими, ніж витончені частини 11 і 13. На практиці це відповідає тому, що відхилення, що 90671 10 допускаються при виготовленні пристрою, складають порядку декількох мкм, що є сумісним з точністю способів, які звичайно використовують при хімічній обробці датчиків малих розмірів. На Фіг.5 представлений інший варіант реалізації пристрою механічної розв'язки згідно з винаходом. Пристрій являє собою прямокутну рамку DM', складену з чотирьох сторін 41, 42, 43 і 44, яка відрізняється від рамки DM на Фіг.3, головним чином, більшою кількістю масивних та витончених частин. Точніше, видалення матеріалу в сторонах 41 і 42 здійснюють для того, щоб одержувати витончені частини 15 і 16, перетин е4 яких, виміряний у площині рамки DM', є істотно нижче перетину е1 невитончених частин вказаних сторін. Величина е4 дорівнює приблизно третині величини е1. Узагальнено, величина е4 перебуває у діапазоні від чверті до половини величини е1. Довжина L3 витончених частин 15 і 16 завжди приблизно дорівнює довжині L2 витончених частин 12 і 14 двох інших сторін 43 і 44. Узагальнено, L3 перебуває у діапазоні від половини до двох довжин L2. Згідно з Фіг.5 невитончена частина кожної зі сторін 41 і 42 завжди з'єднана з невитонченою частиною, однією з двох інших сторін 44 і 43 та утворює зі згаданою невитонченою частиною масивну частину (65, 63), а інша невитончена частина кожної зі сторін 41 і 42 утворює масивну частину (66, 64). Таким чином, рамка DM' може розглядатися як складена, головним чином, з послідовності чотирьох масивних частин (63, 64, 65, 66) і шести витончених частин (11, 12, 13, 14, 15, 16). Теоретичне вивчення вібраційної поведінки рамки DM', здійснене, наприклад, за допомогою спрощеної теоретичної моделіз однією віссю вібрації та складеної з чотирьох мас і з шести пружин, дозволяє показати, що більша кількість масивних та витончених частин порівняно з рамкою DM, поданою на Фіг.3, дозволяє відчутно розширити відхилення, що допускаються, при виготовленні, необхідні для гарного функціонування пристрою, за умови, як і для рамки DM, щоб дві витончені частини (11 і 12, 13 і 14), розташовані відповідно з одного та з іншого боків від кожної з двох сполучних перемичок (71, 72) і найбільш близьких до вказаної сполучної перемички зон, мали б механічну гнучкість, що значною мірою відрізняються одна від одної. Слід відзначити, і це могло би здатися цікавим при вивченні моделей маси-пружини, при подальшому збільшенні кількості масивних і витончених частин це призвело б до пристрою, в якому розділення між вищезгаданими частинами було б менш чітким, ніжу випадках з рамками DM і DM', а пристрій не дозволив би досягнути значного поліпшення порівняно з рамками DM і DM'. На практиці, рамки DM і DM' дозволяють реалізувати пристрій механічної розв'язки, забезпечують більш широкі відхилення, що припускаються при виготовленні рамки DM', що дозволяє спростити спосіб виготовлення і таким чином забезпечити менш вартісні пристрої, ніж це має місце для рамки DM. 11 90671 12 13 90671 14 15 Комп’ютерна верстка Л.Литвиненко 90671 Підписне 16 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMonolithic differential indicator of vibration
Автори англійськоюLE TRAON, Olivier, PERNICE, Marc, JANIAUD, Denis, LECORRE, Bernard, Muller Serge
Назва патенту російськоюМонолитный дифференциальный датчик вибрации
Автори російськоюЛе Траон Оливье, Пернис Марк,Жаньйо Дени, Лекорр Бернар, Мюллер Серж
МПК / Мітки
МПК: G01P 15/08
Мітки: диференціальний, вібрації, монолітний, датчик
Код посилання
<a href="https://ua.patents.su/8-90671-monolitnijj-diferencialnijj-datchik-vibraci.html" target="_blank" rel="follow" title="База патентів України">Монолітний диференціальний датчик вібрації</a>
Монолітний датчик прискорення та акселерометр
Номер патенту: 42849
Опубліковано: 15.11.2001
Автори: Джаніауд Деніс, Траон Олівер Ле, Мюллєр Серж
МПК: H01L 29/84, G01P 15/08
Мітки: датчик, монолітний, прискорення, акселерометр
Формула / Реферат:
1. Монолітний датчик прискорення, що складається з нерухомої частини, рухомої масивної частини та резонатора, одна з двох кінцевих частин якого з'єднана з рухомою масивною частиною, який відрізняється тим, що він включає другу рухому масивну частину, з'єднану з іншою кінцевою частиною резонатора, гнучку раму, що оточує дві рухомі масивні частини, перший сполучний елемент, що з'єднує раму з другою рухомою масивною частиною, та другий сполучний...
Індуктивний датчик вібрації
Номер патенту: 17151
Опубліковано: 15.09.2006
Автори: Тартишев Ігор Григорович, Єремєєв Олександр Андрійович, Сєров Олександр Володимирович, Рудакова Ганна Володимирівна, Решетняк Юрій Степанович
МПК: G01H 11/00
Мітки: датчик, вібрації, індуктивний
Формула / Реферат:
Індуктивний датчик вібрацій, що містить корпус і розміщені в ньому на ізоляційній втулці вимірювальну котушку, постійний магніт, який відрізняється тим, що додатково містить вимірювальну котушку на ізоляційній втулці й постійний магніт, причому внутрішня поверхня втулок і зовнішня поверхня магнітів забезпечені антифрикційним покриттям, а вимірювальні котушки, постійні магніти й втулки розташовані перпендикулярно один до одного на різних...
Спосіб виключення вібрації на валкошліфувальних верстатах
Номер патенту: 21286
Опубліковано: 15.03.2007
Автори: Шарко Євген Іванович, Волошин Олексій Іванович, Токарев Олександр Олексійович, Василенко Микола Іванович, Шарко Тарас Євгенович
МПК: B24B 5/00
Мітки: виключення, верстатах, вібрації, валкошліфувальних, спосіб
Формула / Реферат:
1. Спосіб виключення вібрації на валкошліфувальних верстатах, що включає визначення чинників вібрації і вироблення заходів для її усунення, який відрізняється тим, що визначення чинників вібрації здійснюється шляхом тестового шліфування двох валків, приблизно рівних по довжині і різних за масою, і порівняння результатів шліфування по розташуванню на поверхні валків плям, отриманих у результаті вібрації.2. Спосіб виключення вібрації за...
Засіб для захисту рук від вібрації
Номер патенту: 6539
Опубліковано: 16.05.2005
Автори: Пластун Віталій Миколайович, Долженков Анатолій Пилипович
МПК: A41D 19/015
Мітки: рук, захисту, засіб, вібрації
Формула / Реферат:
Засіб для захисту рук від вібрації, виконаний у вигляді піврукавички, яка містить тильну й долонну частини, напалок і крагу, при цьому долонна частина й напалок містять накладку з віброгасильного матеріалу, який відрізняється тим, що накладку виконано з віброгасильного матеріалу на основі базальту, зовнішню сторону долонної частини піврукавички виконано з тканини з вкрапленням поліетилену, а крагу обладнано липкою стрічкою.
Спосіб вимірювання та контролю параметрів вібрації турбомашини
Номер патенту: 4721
Опубліковано: 15.02.2005
Автори: Бойко Михайло Васильович, Жаріков Віталій Миколайович, Хвостов Костянтин Володимирович, Гарагуль Анатолій Андрійович
МПК: G01M 7/00, G01M 7/02, G01H 11/00
Мітки: контролю, турбомашині, вимірювання, параметрів, спосіб, вібрації
Формула / Реферат:
Спосіб вимірювання та контролю параметрів вібрації турбомашин, за яким параметри вібрації вимірюють за допомогою датчиків віброприскорення, при цьому сигнали від датчиків віброприскорення перетворюють в цифрову форму, оброблюють за допомогою апаратно-програмного блоку, а результати відображаються в графічній формі на екрані дисплея апаратно-програмного блоку, який відрізняється тим, що вібраційні сигнали від датчиків віброприскорення або...
Попередній патент: Заміщені похідні морфоліну і тіоморфоліну
Наступний патент: Засіб для покриття насіння цукрових буряків стимулюючими речовинами
Випадковий патент: Спосіб виготовлення лікарських серветок з комплексом мінеральних солей