Монолітний датчик прискорення та акселерометр

Формула / Реферат
1. Монолітний датчик прискорення, що складається з нерухомої частини, рухомої масивної частини та резонатора, одна з двох кінцевих частин якого з'єднана з рухомою масивною частиною, який відрізняється тим, що він включає другу рухому масивну частину, з'єднану з іншою кінцевою частиною резонатора, гнучку раму, що оточує дві рухомі масивні частини, перший сполучний елемент, що з'єднує раму з другою рухомою масивною частиною, та другий сполучний елемент, що з'єднує раму з нерухомою частиною.
2. Датчик по п. 1, який відрізняється тим, що гнучка рама має прямокутну форму і включає дві ділянки, що пролягають практично паралельно резонаторові, та дві інші ділянки, що пролягають практично перпендикулярно резонаторові, і з'єднані відповідно з другою рухомою масивною частиною та нерухомою частиною першим та другим сполучними елементами, причому перший сполучний елемент має ширину, яка є меншою за ширину другої рухомої масивної частини, а другий сполучний елемент має ширину, яка є меншою за довжину вказаних інших ділянок, причому вказану ширину вибрано по довжині інших вказаних ділянок, причому в оптимальному варіанті принаймні один із сполучних елементів має поперечний розріз такого ж порядку величини, що й розрізи ділянок рами.
3. Датчик по п. 1 або 2, який відрізняється тим, що рухомі масивні частини, резонатор, гнучка рама та сполучні елементи мають спільну площину симетрії, перпендикулярну площині рами, причому сполучні елементи розташовані відповідно на перетинах рами та цієї площини симетрії.
4. Датчик по будь-якому з пп.1-3, який відрізняється тим, що він включає дві співплощинні пластинки, кожна з яких має кінцеві частини, з'єднані відповідно з двома рухомими масивними частинами, і розташовані з обох боків резонатора.
5. Датчик по п. 4, який відрізняється тим, що пластинки мають довжину, меншу за довжину резонатора, яка в оптимальному варіанті становить від однієї десятої частини до половини довжини резонатора.
6. Датчик по п. 4 або 5, який відрізняється тим, що положення пластинок є практично вертикальним до середини довжини резонатора.
7. Датчик по будь-якому з пп. 4-6, який відрізняється тим, що пластинки вирівнюються по спільній стороні двох рухомих масивних частин, а резонатор вирівнюється по іншій спільній стороні двох рухомих масивних частин, причому пластинки та резонатор мають однакову товщину, взяту по товщині рухомих масивних частин.
8. Датчик по будь-якому з пп. 1-7, який відрізняється тим, що нерухома частина розташована всередині рами.
9. Датчик по будь-якому з пп. 1-7, який відрізняється тим, що нерухома частина має U-подібну форму, що оточує раму, за винятком ділянки рами, з'єднаної з першим сполучним елементом, і включає основну кільцеву ділянку, середина якої з'єднана з другим сполучним елементом, і дві гілки, з'єднані відповідними кінцевими частинами з основною ділянкою для кріплення датчика на основі.
10. Датчик по будь-якому з пп. 1-7, який відрізняється тим, що він включає два електроди, що підтримуються резонатором, дві контактні ділянки, що підтримуються нерухомою частиною, та дві стрічки, що мають провідність і підтримуються другою рухомою масивною частиною, перший сполучний елемент, раму, другий сполучний елемент та нерухому частину для з'єднання двох електродів з двома відповідними контактними ділянками.
11. Акселерометр, що включає перший та другий монолітні датчики прискорення по будь-якому з пп. 1-10, який відрізняється тим, що положення другого датчика виводяться з положення першого датчика повертанням на 180° навколо осі, паралельної осі, що проходить через кінцеві частини резонатора першого датчика, причому нерухомі частини двох датчиків є сполученими.
12. Акселерометр по п. 11, який відрізняється тим, що датчики розташовані симетрично один одному відносно площини, паралельної співплощинним сторонам рухомих масивних частин кожного з датчиків.
13. Акселерометр по п. 11, який відрізняється тим, що рухомі масивні частини рами та нерухомі частини датчиків мають співплощинні сторони, причому датчики в оптимальному варіанті розташовані симетрично один одному відносно осі, паралельної співплощинним сторонам.
Текст
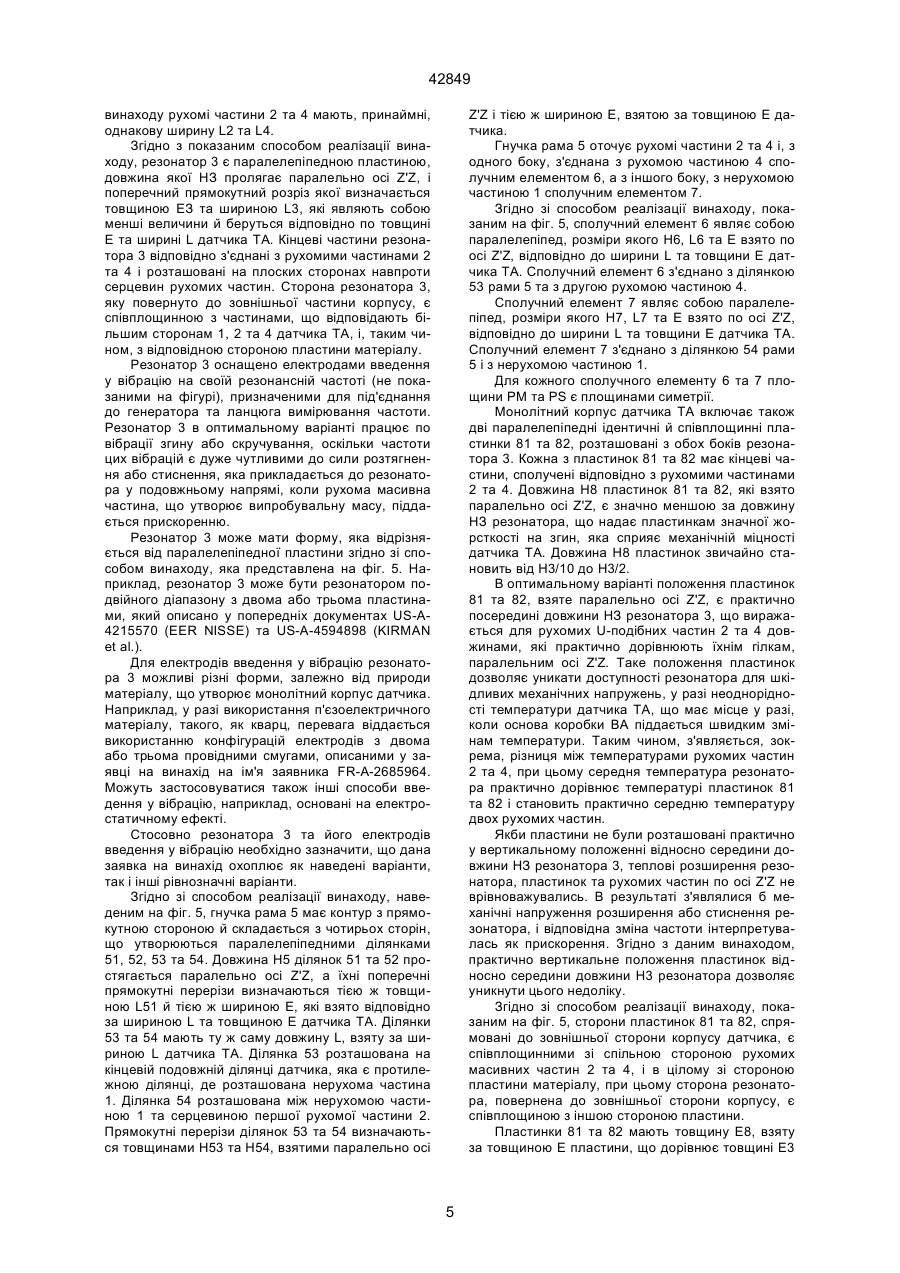
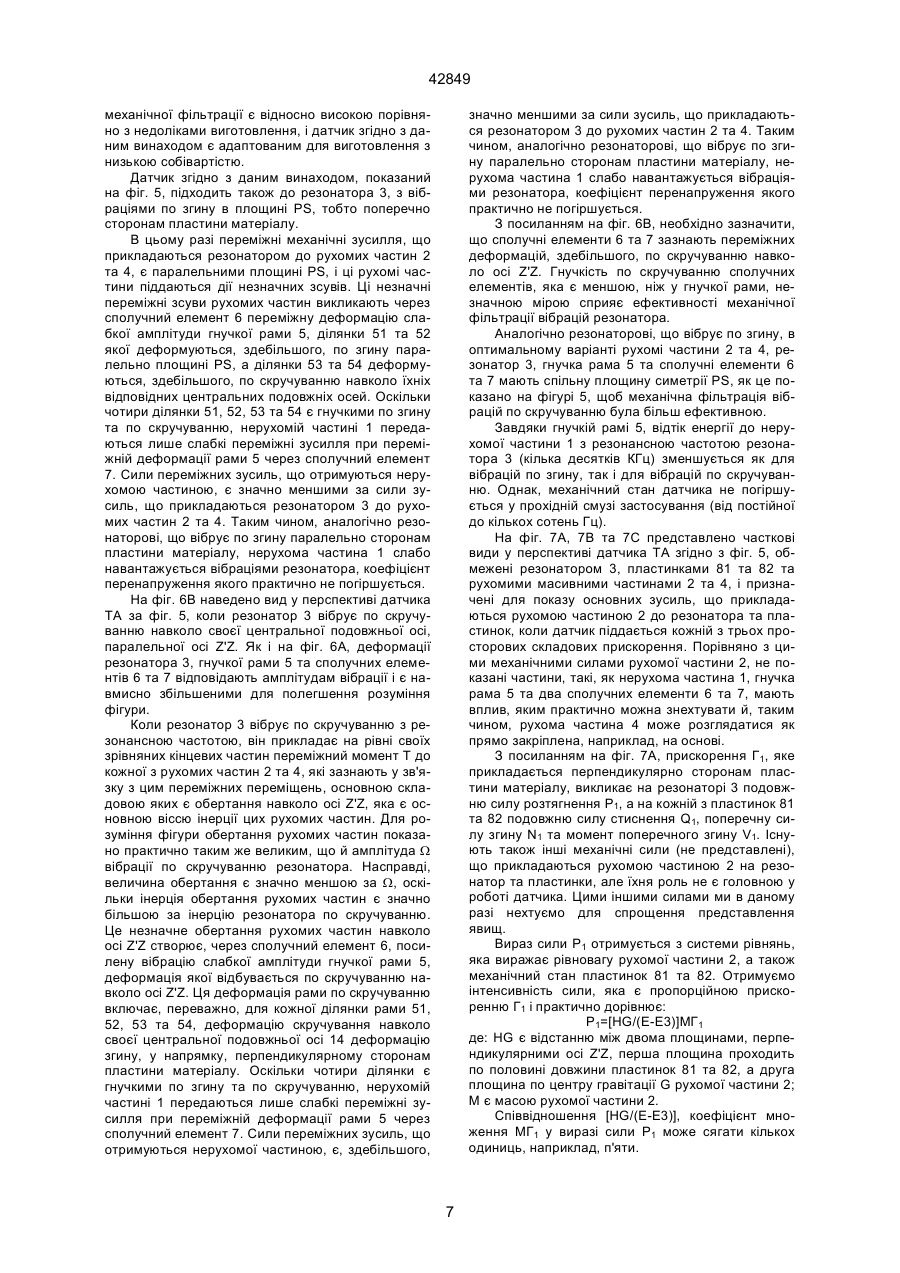
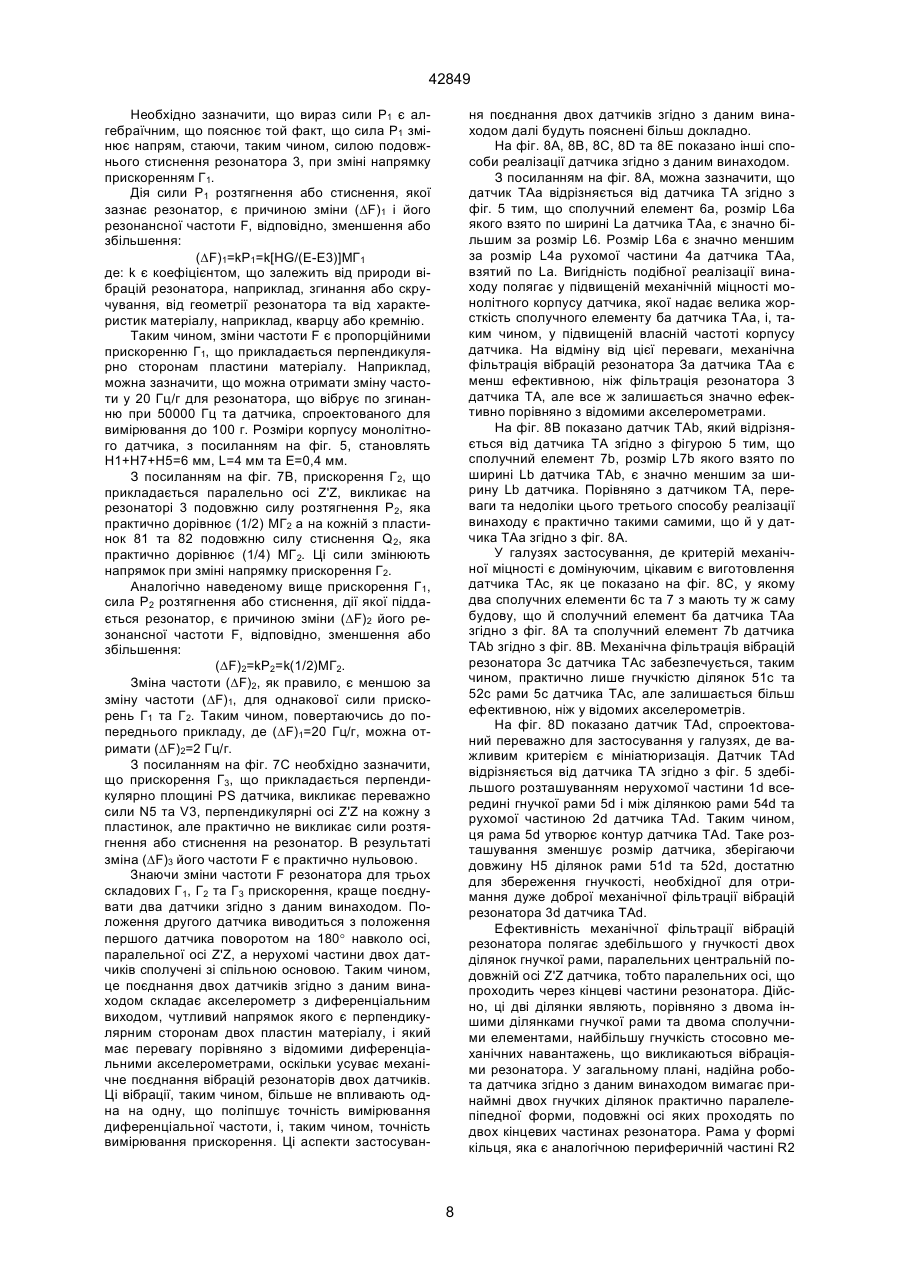
1. Монолітний датчик прискорення, що складається з нерухомої частини, рухомої масивної частини та резонатора, одна з двох кінцевих частин якого з'єднана з рухомою масивною частиною, який відрізняється тим, що він включає другу рухому масивну частину, з'єднану з іншою кінцевою частиною резонатора, гнучку раму, що оточує дві рухомі масивні частини, перший сполучний елемент, що з'єднує раму з другою рухомою масивною частиною, та другий сполучний елемент, що з'єднує раму з нерухомою частиною. 2. Датчик по п. 1, який відрізняється тим, що гнучка рама має прямокутну форму і включає дві ділянки, що пролягають практично паралельно резонаторові, та дві інші ділянки, що пролягають практично перпендикулярно резонаторові, і з'єднані відповідно з другою рухомою масивною частиною та нерухомою частиною першим та другим сполучними елементами, причому перший сполучний елемент має ширину, яка є меншою за ширину другої рухомої масивної частини, а другий сполучний елемент має ширину, яка є меншою за довжину вказаних інших ділянок, причому вказану ширину вибрано по довжині інших вказаних ділянок, причому в оптимальному варіанті принаймні один із сполучних елементів має поперечний розріз такого ж порядку величини, що й розрізи ділянок рами. 3. Датчик по п. 1 або 2, який відрізняється тим, що рухомі масивні частини, резонатор, гнучка рама та сполучні елементи мають спільну площину симетрії, перпендикулярну площині рами, причому сполучні елементи розташовані відповідно на перетинах рами та цієї площини симетрії. 4. Датчик по будь-якому з пп. 1-3, який відрізняється тим, що він включає дві співплощинні пластинки, кожна з яких має кінцеві частини, з'єднані C2 (54) МОНОЛІТНИЙ ДАТЧИК ПРИСКОРЕННЯ ТА АКСЕЛЕРОМЕТР 42849 13. Акселерометр по п. 11, який відрізняється тим, що рухомі масивні частини рами та нерухомі частини датчиків мають співплощинні сторони, причому датчики в оптимальному варіанті розташовані симетрично один одному відносно осі, паралельної співплощинним сторонам. Даний винахід стосується монолітного датчика прискорення, що складається з нерухомої частини, рухомої масивної частини та резонатора, сполученого однією з кінцевих частин з рухомою масивною частиною, а також акселерометра, що включає датчики. Цей датчик призначений, наприклад, для акселерометра з диференціальним виходом. Зокрема, винахід передбачає недорогий мініатюрний акселерометр, який може застосовуватися, наприклад, у навігаційних системах літаків та гелікоптерів, у системах управління ракетами та у системах активної підвіски наземного транспорту. Найкращим резонатором, що складає чутливий елемент датчика згідно з даним винаходом, є вібруючий язичок з п'єзоелектричного матеріалу, що спрацьовує на згин або скручування. Частоти вібрації язичка є дуже чутливими до сили розтягнення або стиснення, яка прикладається до язичка у подовжньому напрямку, коли рухома масивна частина, що утворює випробувальну масу, піддається прискоренню. Розширення або стиснення язичка перетворюється на електричні сигнали, які уловлюються, наприклад, електродами, прикріпленими до вібруючого язичка і з'єднаними з коливальним контуром. На виході з коливального контуру створюється сигнал, зміни частоти якого відображають зміни прискорення. Порівняно з традиційними датчиками прискорення з аналогічним виходом (наприклад, електричної напруги), датчики прискорення з виходом частоти мають технічну перевагу, оскільки з частотою зручно працювати в цифровому режимі. Іншим важливим аспектом є монолітність датчика, яка робить можливим виробництво шляхом хімічної обробки недорогих мініатюрних датчиків і дозволяє отримати високі технічні характеристики, оскільки саме складання є основною обмежувальною характеристикою немонолітніх датчиків. Матеріалами, які найчастіше використовуються для виготовлення монолітних датчиків є кварц та кремній, які мають відмінну стійкість механічних характеристик. Згідно з заявкою на винахід FR-A-2 685964 на ім'я заявника, корпус датчика прискорення СА', показаного на фіг. 1, є монолітним і виготовляється шляхом хімічної обробки пластини п'єзоелектричного кристалу, такого як кварц. Корпус датчика прискорення СА' має загальну форму паралелепіпеду й складається з нерухомої масивної частини 1, з'єднаної з основою bа, з рухомої масивної частини 2, з двох вібруючих язичків 31, та 32 і з двох гнучких з'єднань 441 та 442. Корпус датчика прискорення СА' є симетричним відносно центральної подовжньої осі z' z. Вібруючий язичок 31 є балкою з малим прямокутнимперерізом, яка п'єзоелектрично збуджується по вібраціях згину двома металевими електродами 341 та 342, що мають протилежну полярність. Ці електроди нанесені способом фотолітографічного друкування на зовнішній подовжній бік язичка й завершуються на відповідному боці F1 нерухомої частини 1 двома пластинками 331 та 332, що мають провідність, і з'єднані з двома першими клемами коливального ланцюга 51 за допомогою двох провідних дротів 391 та 392. Ідентичне розташування електродів та пластин, сполучених з коливальним ланцюгом 52, передбачено на язичку 32 та протилежному боці F2 нерухомої частини 1. Виходи двох коливальних ланцюгів 51 та 52 сполучаються з пристроєм для вимірювання диференціальної частоти, що включає схему віднімання частоти 6 та частотомір 7, при цьому вимірювана частотоміром 7 частота (f1-f2) відображає вимірюване прискорення. Стосовно механічного пристрою відомого датчика прискорення СА', слід нагадати, що два з'єднання 441 та 442 мають можливість згинатися у чутливому напрямі DS, який є перпендикулярним до серединної площини рm корпусу. Таким чином, коли акселерометр піддається дії прискорення у цьому напрямі DS, язички S1 та S2 піддаються розширенню та стисненню, тобто протилежно спрямованим осьовим силам, що пропорційні прискоренню. В результаті ці два язички змінюють частоту з протилежними знаками, і, у разі ідентичності язичків, однієї величини. Навпаки, вхідні величини перешкод, таких, як температура, як правило, однаково впливають на обидва язички й викликають зміни частоти одного знаку. Перевага диференціального виходу (f1-f2) полягає у тому, що це дозволяє зменшити вхідні величини, які відрізняються від прискорення, у чутливому напрямі DS. Особлива форма з'єднань 441 та 442 у вигляді маршів сходів дозволяє здійснювати хімічну обробку корпусу СА' за один етап, з однаковою глибиною обробки, починаючи з двох боків F1 та F2 корпусу датчика, паралельних площині рm. Механічний пристрій відомого датчика прискорення СА' має недоліки, пов'язані з вібраціями двох язичків 31 та 32. По-перше, механічні навантаження, такі, як напруження зсуву та вигинаючий момент, які прикладаються вібраціями двох язичків 31 та 32 до місця їхнього "жорсткого закріплення" на нерухомій масивній частині 1, викликають відтік коливальної механічної енергії до основи bа, з якою вона з'єднана. Результатом є зменшення коефіцієнту перенапруження вібрації кожного з язичків 31 та 32. По-друге, механічні навантаження, які прикладаються вібраціями цих язичків до місця їхнього "жорсткого закріплення" на рухомій частині 2, викликають невеличкі коливальні переміщення цієї рухомої частини з тими самими частотами, що й вібрації язичків 31 та 32, В результаті відбувається механічне з'єднання вібрацій цих двох язичків, яке виявляється у викривленні їхніх вібрацій. Ці два недоліки впливають на точність вимірювання диференціальної частоти (f1-f2) і, відповідно, величини прискорення, яка з неї випливає. Другий монолітний датчик, відомий з заявки на винахід WO-A-8 9/10568, показано на фіг. 2. Корпус цього датчика виготовляється шляхом хімічної 2 42849 обробки кварцової пластини й складається з нерухомої масивної частини 21, випробувальної маси 22 та трьох резонаторів 23, 24 та 25, що вібрують по згину і збуджуються, наприклад, термомеханічним впливом за допомогою нагрівних елементів (не показаних на фігурі), які отримуються шляхом іонної імплантації на кожен резонатор. Чутливий напрямок цього другого відомого датчика є перпендикулярним до сторін пластини. Вихідний сигнал датчика є функцією лінійного поєднання частот трьох резонаторів 23, 24 та 25, яка не залежить від прискорень у чутливому напрямі, який є перпендикулярним до сторін пластини. Головним недоліком другого відомого датчика є взаємодія між вібраціями трьох резонаторів, що впливає на точність роботи датчика. На фіг. 3 показано корпус третього монолітного датчика, який отримується шляхом хімічної обробки кремнієвої пластини, опис якої наведено у заявці на винахід GB-A-2162314. Корпус третього датчика складається з опорної рами 11, що має тонкі ділянки, що згинаються 15, та резонатор з подвійним діапазоном, що утворюється двома нитками 12, які вібрують у протилежних фазах, та двома кінцевими ділянками 13 та 14, з'єднаними з опорною рамою. Кінцева ділянка 14 з'єднана з нерухомою частиною 16 опорної рами, а інша кінцева ділянка 13 з'єднана з рухомою частиною 17 Uподібної форми опорної рами, що утворює випробувальну масу. Нерухома та рухома частини 16 та 17 з'єднуються ділянками, що згинаються 15, які утворюють з'єднання. Першим недоліком третього датчика є недостатнє збереження вібруючої механічної енергії у двох нитках 12, враховуючи невелику масу рухомої частини 17. Другим недоліком третього датчика є розміщення з'єднань 15 випробувальної маси 17, яке є невигідним для термомеханічного стану датчика у момент дії на нього швидких змін температури. У цьому разі з'являється різниця між температурою 1 нерухомої частини 16 та температурою 2 випробувальної маси 17, оскільки ці дві частини сполучені резонатором 12 та з'єднаннями 15, які можуть розглядатися як теплові фільтри у зв'язку з їхніми малими розрізами. Таким чином, середня температура резонатора 12 практично дорівнює температурі з'єднань 15 і становить приблизно (1+2)/2. Положення з'єднань 15, взяте паралельно до ниток 12, є практично вертикальним відносно кінцевої ділянки 14 резонатора, і, таким чином, паралельні гілки U-подібної випробувальної маси 17 простягаються практично по всій довжині резонатора. В цих умовах теплові розширення резонатора та опорної рами 11 не врівноважуються й індукують механічні напруження розширення або стиснення резонатора, вимірювання частоти якого хибно інтерпретується як прискорення. На фіг. 4 показано відомий резонатор, призначений для термостатичного генератора з малим споживанням й швидким нагріванням, опис якого дано у заявці на винахід FR-A-2688954. На відміну від відомих датчиків прискорення, описаних вище, цей резонатор спроектовано для видачі сигналу, частота якого має бути найбільш стабільною, і, таким чином, мало чутливою до прискорення. Таким чином, функції цього резонатора відрізняються від функцій датчика згідно з даним винаходом. З конструктивної точки зору, резонатор, показаний на фіг. 4, складається з центральної частини R1 та периферичної частини R2, що утворює кільце, що оточує на невеличкій радіальній відстані центральну частину, і з'єднується з цією частиною проміжною частиною R4, у якій пророблено віконце. Периферична частина R2 з'єднана з центральною частиною R1 єдиним сполучним мостом R3, який утворюється невирізаною частиною проміжної частини R4 і простягається на невеличку ділянку цієї проміжної частини R4. Центральна частина R1 утворює активну вібруючу частину резонатора, тоді як периферична частина R2 нерухомо закріплена у коробці за допомогою фіксуючого пристрою R5, такого, як скоба, що розміщується на ділянці периферичної частини R2, який розташовується у протилежному напрямі від єдиного сполучного мосту R3 відносно активної центральної частини R1. Цей спосіб виготовлення з єдиним сполучним мостом забезпечує каналування теплових потоків провідності й надійний контроль температури резонатору за допомогою нагрівального елементу R6 та датчика температури R7, розташованих на рівні сполучного мосту R3. Центральна активна частина R1 вібрує по зсуву товщини з частотою близько 10 МГц. Вібруюча механічна енергія утримується в центральній частині завдяки випуклості принаймні однієї з двох великих сторін центральної частини. Метою даного винаходу є усунення недоліків вищеописаних відомих датчиків через пропозицію монолітного датчика, визначення якого дано у вступній частині, а саме, датчика для диференціального акселерометра, геометрична конструкція якого дозволяє уникати відтоку вібруючої механічної енергії від резонатора до нерухомої частини датчика. Коефіцієнт перенапруження резонатора не погіршується, і усувається механічне сполучення з іншим аналогічним резонатором, що поліпшує точність роботи акселерометра. Для розв'язання цієї задачі датчик згідно з даним винаходом включає другу рухому масивну частину, з'єднану з іншим кінцем резонатора, гнучку раму, що оточує дві рухомі масивні частини, перший сполучний елемент, що з'єднує раму з другою рухомою масивною частиною, і другий сполучний елемент, що з'єднує раму з нерухомою частиною. Таким чином, гнучкість рами та положення двох рухомих масивних частин всередині цієї рами дозволяють створити механічний фільтр між резонатором та нерухомою частиною датчика, і при цьому дана нерухома частина практично не піддається впливу вібрацій резонатора. Коефіцієнт перенапруження резонатора практично не погіршується, і точність вимірювань датчика поліпшується. Згідно з оптимальним способом виготовлення гнучка рама є прямокутною й складається з двох ділянок, практично паралельних резонаторові, та двох інших ділянок, практично перпендикулярних резонаторові, й, відповідно, з'єднаних з другою рухомою масивною частиною й нерухомою частиною, першим та другим сполучними елементами. Ширина першого сполучного елементу менша за товщину другої рухомої масивної частини, а ширина другого сполучного елементу менша за довжи 3 42849 ну інших ділянок рами, при цьому, ці значення ширини беруться по довжині цих інших ділянок. Краще, щоб принаймні один зі сполучних елементів мав величину поперечного перерізу того самого порядку, що й величина перерізів ділянок рами. Для отримання максимальної ефективності механічного фільтру дві рухомі масивні частини, резонатор, гнучка рама та два сполучних елементи мали спільну площину симетрії, перпендикулярну площині рами, при цьому, два сполучні елементи мають бути розташовані відповідно на двох перетинах рами та цієї площини симетрії. Іншими характеристиками винаходу є те, що монолітний корпус датчика складається з двох співплощинних пластинок, кожна з яких має кінцеві частини, сполучені відповідно з двома частинами й розташовані з обох боків резонатора. Довжина цих пластинок може бути значно меншою за довжину резонатора, щоб забезпечити механічну міцність датчика. Положення пластинок може бути практично вертикальним відносно середини довжини резонатора, що дозволяє уникнути індукування шкідливих механічних напруг при швидкій зміні температури. Для оптимальної хімічної обробки за один цикл монолітного корпусу датчика з пластини матеріалу однорідної товщини пластинки мають вирівнюватися по одній стороні цієї пластини, тобто, принаймні по спільній стороні рухомих масивних частин, а резонатор має вирівнюватися по іншій стороні пластини, тобто, принаймні по спільній стороні рухомих масивних частин, при цьому пластинки та резонатор повинні мати однакову товщину, взяту відповідно до товщини пластини, тобто, рухомих масивних частин. Нерухома частина може бути розташована всередині рами, щоб заздалегідь мініатюризувати датчик. Винахід стосується також акселерометра, типу акселерометра з диференціальним виходом, який складається з двох датчиків прискорення згідно з даним винаходом. Положення другого датчика виводиться з положення першого датчика поворотом на 180° навколо осі, яка є паралельною осі, що проходить по двох кінцевих частинах резонатора першого датчика, при цьому, нерухомі частини двох датчиків з'єднані зі спільною основою. Згідно з першим оптимальним способом втілення винаходу датчики розташовуються симетрично відносно площини, паралельної співплощинним сторонам рухомих масивних частин кожного з датчиків. Згідно з другим оптимальним способом втілення винаходу рухомі масивні частини, рами та нерухомі частини мають співплощинні сторони, при цьому перевага віддається симетричному розташуванню датчиків відносно осі, паралельної співплощинним сторонам. Інші характеристики та переваги винаходу будуть відображені у подальшому описі різноманітних оптимальних способів реалізації винаходу з посиланням на відповідні фігури у додатку, де: на фігурах 1, 2 та 3 наведено зображення у перспективі трьох монолітних датчиків прискорення, виготовлених за попередніми технологіями, які вже коментувались; на фіг. 4 наведено вид згори резонатора за попередніми технологіями виготовлен ня, які вже коментувались; на фіг. 5 наведено зображення у перспективі датчика прискорення згідно з першим способом реалізації винаходу; на фіг. 6А та 6В наведено види спереду та у перспективі датчика за фіг. 5, де показано збільшення деформації датчика при відповідних вібраціях по згинанню та скручуванню резонатора датчика; на фіг. 7А, 7В та 7С наведено зображення у перспективі рухомих частин та резонатора датчика за фігурою 5, де показано механічні зусилля, викликані відповідно кожною з трьох просторових складових; на фіг. 8А, 8В та 8С наведено зображення у перспективі датчиків прискорення згідно з іншими способами реалізації винаходу, де перевага віддається збільшенню механічної міцності датчика; на фіг. 8D наведено зображення у перспективі датчика прискорення згідно з іншим способом реалізації винаходу, де перевага віддається мініатюризації; на фіг. 8Е наведено зображення у перспективі датчика прискорення згідно з іншим способом реалізації винаходу з пристроями вібрації, де перевага віддається резонаторові, що вібрує на згин; на фіг. 9 наведено зображення у перспективі диференціального акселерометра згідно з даним винаходом, який складається з двох датчиків, практично ідентичних датчикові згідно з фігурою 8Е, з пристроями вимірювання частоти; на фіг. 10 наведено зображення у перспективі диференціального акселерометра згідно з іншим способом реалізації винаходу, який отримується шляхом обробки двох датчиків в одній пластині матеріалу. З посиланням на фіг. 5 можна зазначити, що датчик прискорення та згідно з даним винаходом складається здебільшого з нерухомої частини 1, першої рухомої масивної частини 2, що утворює випробувальну масу, резонатора 3, що утворює чутливий елемент, другої рухомої масивної частини 4, гнучкої рами 5 та двох сполучних елементів 6 та 7. Згідно зі способом виготовлення, показаним на фіг. 5, датчик ТА утворює монолітний корпус, що обробляється в тій самій пластині матеріалу, такого, як кварц або кремній, з однорідною товщиною Е, шириною L та висотою Н1+Н7+Н5. Датчик ТА має загальну форму паралелепіпеду, яка простягається вертикально у висоту, що матеріалізується центральною подовжньою віссю Z'Z. Ця вісь Z'Z, з одного боку, входить у серединну площину РМ пластини, паралельну сторонам цієї пластини, а з іншого боку, у площину PS, перпендикулярну сторонам пластини. Площина PS є площиною симетрії датчика. Нерухома частина 1 утворює паралелепіпед, розташований на кінцевій подовжній частини корпусу датчика, і призначається для з'єднання з конструкцією пристрою (не показаного на фігурі) через основу коробки ВА. Кріплення нерухомої частини 1 до основи ВА здійснюється, наприклад, шляхом приклеювання. Кожна з рухомих частин 2 та 4 має загальну U-подібну форму, дві паралельні гілки якої розташовані паралельно центральній подовжній осі Z'Z датчика. Серцевини U-подібних форм рухомих частин 2 та 4 розташовані перпендикулярно осі Z'Z і навпроти одна одної. Рухома частина 2 розташована ближче до нерухомої частини 1, ніж рухома частина 4. Згідно з показаним способом реалізації 4 42849 винаходу рухомі частини 2 та 4 мають, принаймні, однакову ширину L2 та L4. Згідно з показаним способом реалізації винаходу, резонатор 3 є паралелепіпедною пластиною, довжина якої НЗ пролягає паралельно осі Z'Z, і поперечний прямокутний розріз якої визначається товщиною ЕЗ та шириною L3, які являють собою менші величини й беруться відповідно по товщині Е та ширині L датчика ТА. Кінцеві частини резонатора 3 відповідно з'єднані з рухомими частинами 2 та 4 і розташовані на плоских сторонах навпроти серцевин рухомих частин. Сторона резонатора 3, яку повернуто до зовнішньої частини корпусу, є співплощинною з частинами, що відповідають більшим сторонам 1, 2 та 4 датчика ТА, і, таким чином, з відповідною стороною пластини матеріалу. Резонатор 3 оснащено електродами введення у вібрацію на своїй резонансній частоті (не показаними на фігурі), призначеними для під'єднання до генератора та ланцюга вимірювання частоти. Резонатор 3 в оптимальному варіанті працює по вібрації згину або скручування, оскільки частоти цих вібрацій є дуже чутливими до сили розтягнення або стиснення, яка прикладається до резонатора у подовжньому напрямі, коли рухома масивна частина, що утворює випробувальну масу, піддається прискоренню. Резонатор 3 може мати форму, яка відрізняється від паралелепіпедної пластини згідно зі способом винаходу, яка представлена на фіг. 5. Наприклад, резонатор 3 може бути резонатором подвійного діапазону з двома або трьома пластинами, який описано у попередніх документах US-A4215570 (EER NISSE) та US-A-4594898 (KIRMAN et al.). Для електродів введення у вібрацію резонатора 3 можливі різні форми, залежно від природи матеріалу, що утворює монолітний корпус датчика. Наприклад, у разі використання п'єзоелектричного матеріалу, такого, як кварц, перевага віддається використанню конфігурацій електродів з двома або трьома провідними смугами, описаними у заявці на винахід на ім'я заявника FR-A-2685964. Можуть застосовуватися також інші способи введення у вібрацію, наприклад, основані на електростатичному ефекті. Стосовно резонатора 3 та його електродів введення у вібрацію необхідно зазначити, що дана заявка на винахід охоплює як наведені варіанти, так і інші рівнозначні варіанти. Згідно зі способом реалізації винаходу, наведеним на фіг. 5, гнучка рама 5 має контур з прямокутною стороною й складається з чотирьох сторін, що утворюються паралелепіпедними ділянками 51, 52, 53 та 54. Довжина Н5 ділянок 51 та 52 простягається паралельно осі Z'Z, а їхні поперечні прямокутні перерізи визначаються тією ж товщиною L51 й тією ж шириною Е, які взято відповідно за шириною L та товщиною Е датчика ТА. Ділянки 53 та 54 мають ту ж саму довжину L, взяту за шириною L датчика ТА. Ділянка 53 розташована на кінцевій подовжній ділянці датчика, яка є протилежною ділянці, де розташована нерухома частина 1. Ділянка 54 розташована між нерухомою частиною 1 та серцевиною першої рухомої частини 2. Прямокутні перерізи ділянок53 та 54 визначаються товщинами Н53 та Н54, взятими паралельно осі Z'Z і тією ж шириною Е, взятою за товщиною Е датчика. Гнучка рама 5 оточує рухомі частини 2 та 4 і, з одного боку, з'єднана з рухомою частиною 4 сполучним елементом 6, а з іншого боку, з нерухомою частиною 1 сполучним елементом 7. Згідно зі способом реалізації винаходу, показаним на фіг. 5, сполучний елемент 6 являє собою паралелепіпед, розміри якого Н6, L6 та Е взято по осі Z'Z, відповідно до ширини L та товщини Е датчика ТА. Сполучний елемент 6 з'єднано з ділянкою 53 рами 5 та з другою рухомою частиною 4. Сполучний елемент 7 являє собою паралелепіпед, розміри якого Н7, L7 та Е взято по осі Z'Z, відповідно до ширини L та товщини Е датчика ТА. Сполучний елемент 7 з'єднано з ділянкою 54 рами 5 і з нерухомою частиною 1. Для кожного сполучного елементу 6 та 7 площини РМ та PS є площинами симетрії. Монолітний корпус датчика ТА включає також дві паралелепіпедні ідентичні й співплощинні пластинки 81 та 82, розташовані з обох боків резонатора 3. Кожна з пластинок 81 та 82 має кінцеві частини, сполучені відповідно з рухомими частинами 2 та 4. Довжина Н8 пластинок 81 та 82, які взято паралельно осі Z'Z, є значно меншою за довжину НЗ резонатора, що надає пластинкам значної жорсткості на згин, яка сприяє механічній міцності датчика ТА. Довжина Н8 пластинок звичайно становить від Н3/10 до Н3/2. В оптимальному варіанті положення пластинок 81 та 82, взяте паралельно осі Z'Z, є практично посередині довжини НЗ резонатора 3, що виражається для рухомих U-подібних частин 2 та 4 довжинами, які практично дорівнюють їхнім гілкам, паралельним осі Z'Z. Таке положення пластинок дозволяє уникати доступності резонатора для шкідливих механічних напружень, у разі неоднорідності температури датчика ТА, що має місце у разі, коли основа коробки ВА піддається швидким змінам температури. Таким чином, з'являється, зокрема, різниця між температурами рухомих частин 2 та 4, при цьому середня температура резонатора практично дорівнює температурі пластинок 81 та 82 і становить практично середню температуру двох рухомих частин. Якби пластини не були розташовані практично у вертикальному положенні відносно середини довжини НЗ резонатора 3, теплові розширення резонатора, пластинок та рухомих частин по осі Z'Z не врівноважувались. В результаті з'являлися б механічні напруження розширення або стиснення резонатора, і відповідна зміна частоти інтерпретувалась як прискорення. Згідно з даним винаходом, практично вертикальне положення пластинок відносно середини довжини Н3 резонатора дозволяє уникнути цього недоліку. Згідно зі способом реалізації винаходу, показаним на фіг. 5, сторони пластинок 81 та 82, спрямовані до зовнішньої сторони корпусу датчика, є співплощинними зі спільною стороною рухомих масивних частин 2 та 4, і в цілому зі стороною пластини матеріалу, при цьому сторона резонатора, повернена до зовнішньої сторони корпусу, є співплощиною з іншою стороною пластини. Пластинки 81 та 82 мають товщину Е8, взяту за товщиною Е пластини, що дорівнює товщині Е3 5 42849 но нижчими за відповідні сили поперечної сили R та згинаючого моменту С, що прикладаються резонатором 3 до кожної з рухомих частин 2 та 4. Як приклад можна зазначити, що сили r та с можуть бути у сто разів меншими за відповідні сили R та С. Таким чином, гнучкість рами 5 та положення двох рухомих частин 2 та 4 всередині рами характеризують механічний фільтр між резонатором 3 та нерухомою частиною 1 датчика, при цьому нерухома частина дуже мало піддається дії вібрацій резонатора. Коефіцієнт перенапруження резонатора, таким чином, практично не змінюється і точність вимірювання датчика поліпшується. Також з посиланням на фіг. 6А необхідно зазначити, що сполучні елементи 6 та 7 піддаються переміжним деформаціям, здебільшого по згину, паралельно сторонам пластини матеріалу. Це пов'язано з тим самим порядком величини поперечних розрізів (L6.E) та (L7.E) сполучних елементів 6 та 7, які взято поперек осі Z'Z, що й поперечні прямокутні розрізи (L51.E), (Н53.Е) та (Н54.Е) чотирьох ділянок 51, 52, 53, 54, що утворюють раму. Результатом є те, що сполучні елементи 6 та 7 мають гнучкість, яка є, звичайно, меншою за гнучкість рами, але яка сприяє, незначною мірою, ефективності механічної фільтрації вібрацій резонатора. Необхідно нагадати, що переміжні переміщення та деформації, амплітуди яких представлено на фіг. 6А, являють собою основні явища вібрації у датчику. Насправді, існують також інші явища вібрації меншої амплітуди, такі, як переміжне обертання рухомих частин 2 та 4 навколо центральної подовжньої осі Z'Z. Це переміжне обертання рухомих частин викликано вібраціями по згину резонатора 3, оскільки середня площина, у якій відбуваються ці вібрації, проходить по осі Z'Z, яка є основною віссю інерції рухомих частин 2 та 4. Переміжне обертання рухомих частин спричинює переміжне скручування навколо осі Z'Z гнучкої рами 5, гнучкість якої по скручуванню дозволяє передавати нерухомій частини 1 дуже слабкий переміжний момент навколо осі Z'Z. Цей слабкий момент має такий вплив на ефективність механічної фільтрації вібрацій резонатора, яким можна знехтувати. Аспект скручування буде пояснено більш докладно при розгляді резонатора, що вібрує по скручуванню. В цілому, завдяки гнучкості рами 5, відбувається ефективна фільтрація більшості переміжних механічних збуджень, які справляють рухомі частини 2 та 4 на сполучний елемент 6. В усякому разі, для досягнення найбільш ефективної механічної фільтрації рухомі частини 2 та 4, резонатор 3, гнучка рама 5 та сполучні елементи 6 та 7 повинні мати спільну площину симетрії PS, перпендикулярну сторонам пластини матеріалу, яка проходить по осі Z'Z, як це показано на фіг. 5. Якщо ця симетрія не виконується, навмисно або через недоліки виготовлення, переміжні механічні зусилля, що передаються на нерухому частину 1, мають сили, які є вищими за сили, що відповідають симетричному виготовленню, але значно меншими за сили переміжних зусиль R та С, що прикладаються резонатором 3 до кожної рухомої частини 2 та 4. Зроблені зауваження показують, що ефективність резонатора. Товщина Е3=Е8 резонатора та пластинок є меншою за половину товщини Е пластини. Взагалі, товщина Е3=Е8 становить від Е/20 до Е/4. Форми та розміри резонатора й пластинок дозволяють хімічну обробку за один цикл для виготовлення монолітного корпусу датчика ТА. С цією метою до хімічної обробки, дві сторони пластини матеріалу захищаються маскою, геометрична форма якої повторює форму сторони датчика. Таким чином, нерухома частина 1, рухомі частини 2 та 4, гнучка рама 5 та сполучні елементи 6 та 7 захищаються з двох боків, тоді, як резонатор 3 та пластинки 81 та 82 захищаються лише з боків, повернутих до зовнішньої сторони корпусу датчика. Хімічна обробка здійснюється одночасно, починаючи з двох боків пластини, до досягнення необхідної глибини гравіювання (Е-Е3). Оскільки Е3 менше за Е/2, глибина гравіювання (Е-Е3) є більшою за Е/2 і, таким чином, видаляється достатня кількість матеріалу, щоб здійснити обробку, що виходить до гравійованих місць від двох боків пластини, наприклад, між рухомою частиною 2 й ділянкою 54 гнучкої рами 5. Роботу датчика представлено з посиланням на фіг. 6А та 6В, де показано переваги особливого розташування рухомої частини 4, гнучкої рами 5 та сполучних елементів 6 та 7, і з посиланням на фіг. 7А, 7В та 7С, де показано механічний пристрій рухомої частини 2, резонатора 3 та пластинок 81 та 82 датчика за трьома просторовими складовими прискорення. На фіг. 6А наведено вид спереду датчика ТА за фіг. 5, коли резонатор 3 вібрує по згину паралельно сторонам пластини матеріалу. Деформації резонатора 3, гнучкої рами 5 та сполучних елементів 6 та 7 відповідають амплітудам вібрації і є збільшеними для полегшення розуміння фігури. Ці явища вібрації пояснюються таким чином. Коли резонатор 3 вібрує по згину на своїй резонансній частоті, він прикладає на рівні своїх кінцевих "зрівняних" частин поперечну силу R та згинаючий момент С, що чергується на кожній рухомій частині 2 та 4, які з неї причини піддаються переміжним переміщенням, головна складова d яких є зсувом, паралельним сторонам пластини і перпендикулярним центральній подовжній осі Z'Z. Для розуміння фігури зсуву d рухомих частин представлена більшою, ніж амплітуда D вібрації резонатора. Насправді d значно менша за D, оскільки маса рухомих частин є значно більшою за масу резонатора. Цей невеличкий переміжний зсув d рухомих частин 2 та 4 створює через сполучний елемент 6 посилену вібрацію невеличкої амплітуди гнучкої рами 5. Оскільки рухомі частини розташовані всередині рами, посилена вібрація рами є переважно типу паралелограма, що деформується, тобто чотири ділянки 51, 52, 53 та 54, що утворюють раму, піддаються переважно механічним зусиллям згину, а не зусиллям розтягнення або стиснення, як це мало б місце, якби рухомі частини були розташовані з зовнішнього боку рами. Оскільки чотири ділянки є гнучкими, нерухома частина 1 піддається лише незначним переміжним зусиллям, викликаним переміжною деформацією рами 5 через сполучний елемент 7. Переміжні зусилля, що прикладаються до нерухомої частини, являють собою здебільшого силу r та момент с, сили яких є знач 6 42849 механічної фільтрації є відносно високою порівняно з недоліками виготовлення, і датчик згідно з даним винаходом є адаптованим для виготовлення з низькою собівартістю. Датчик згідно з даним винаходом, показаний на фіг. 5, підходить також до резонатора 3, з вібраціями по згину в площині PS, тобто поперечно сторонам пластини матеріалу. В цьому разі переміжні механічні зусилля, що прикладаються резонатором до рухомих частин 2 та 4, є паралельними площині PS, і ці рухомі частини піддаються дії незначних зсувів. Ці незначні переміжні зсуви рухомих частин викликають через сполучний елемент 6 переміжну деформацію слабкої амплітуди гнучкої рами 5, ділянки 51 та 52 якої деформуються, здебільшого, по згину паралельно площині PS, a ділянки 53 та 54 деформуються, здебільшого, по скручуванню навколо їхніх відповідних центральних подовжніх осей. Оскільки чотири ділянки 51, 52, 53 та 54 є гнучкими по згину та по скручуванню, нерухомій частині 1 передаються лише слабкі переміжні зусилля при переміжній деформації рами 5 через сполучний елемент 7. Сили переміжних зусиль, що отримуються нерухомою частиною, є значно меншими за сили зусиль, що прикладаються резонатором 3 до рухомих частин 2 та 4. Таким чином, аналогічно резонаторові, що вібрує по згину паралельно сторонам пластини матеріалу, нерухома частина 1 слабо навантажується вібраціями резонатора, коефіцієнт перенапруження якого практично не погіршується. На фіг. 6В наведено вид у перспективі датчика ТА за фіг. 5, коли резонатор 3 вібрує по скручуванню навколо своєї центральної подовжньої осі, паралельної осі Z'Z. Як і на фіг. 6А, деформації резонатора 3, гнучкої рами 5 та сполучних елементів 6 та 7 відповідають амплітудам вібрації і є навмисно збільшеними для полегшення розуміння фігури. Коли резонатор 3 вібрує по скручуванню з резонансною частотою, він прикладає на рівні своїх зрівняних кінцевих частин переміжний момент Т до кожної з рухомих частин 2 та 4, які зазнають у зв'язку з цим переміжних переміщень, основною складовою яких є обертання навколо осі Z'Z, яка є основною віссю інерції цих рухомих частин. Для розуміння фігури обертання рухомих частин показано практично таким же великим, що й амплітуда W вібрації по скручуванню резонатора. Насправді, величина обертання є значно меншою за W, оскільки інерція обертання рухомих частин є значно більшою за інерцію резонатора по скручуванню. Це незначне обертання рухомих частин навколо осі Z'Z створює, через сполучний елемент 6, посилену вібрацію слабкої амплітуди гнучкої рами 5, деформація якої відбувається по скручуванню навколо осі Z'Z. Ця деформація рами по скручуванню включає, переважно, для кожної ділянки рами 51, 52, 53 та 54, деформацію скручування навколо своєї центральної подовжньої осі 14 деформацію згину, у напрямку, перпендикулярному сторонам пластини матеріалу. Оскільки чотири ділянки є гнучкими по згину та по скручуванню, нерухомій частині 1 передаються лише слабкі переміжні зусилля при переміжній деформації рами 5 через сполучний елемент 7. Сили переміжних зусиль, що отримуються нерухомої частиною, є, здебільшого, значно меншими за сили зусиль, що прикладаються резонатором 3 до рухомих частин 2 та 4. Таким чином, аналогічно резонаторові, що вібрує по згину паралельно сторонам пластини матеріалу, нерухома частина 1 слабо навантажується вібраціями резонатора, коефіцієнт перенапруження якого практично не погіршується. З посиланням на фіг. 6В, необхідно зазначити, що сполучні елементи 6 та 7 зазнають переміжних деформацій, здебільшого, по скручуванню навколо осі Z'Z. Гнучкість по скручуванню сполучних елементів, яка є меншою, ніж у гнучкої рами, незначною мірою сприяє ефективності механічної фільтрації вібрацій резонатора. Аналогічно резонаторові, що вібрує по згину, в оптимальному варіанті рухомі частини 2 та 4, резонатор 3, гнучка рама 5 та сполучні елементи 6 та 7 мають спільну площину симетрії PS, як це показано на фігурі 5, щоб механічна фільтрація вібрацій по скручуванню була більш ефективною. Завдяки гнучкій рамі 5, відтік енергії до нерухомої частини 1 з резонансною частотою резонатора 3 (кілька десятків КГц) зменшується як для вібрацій по згину, так і для вібрацій по скручуванню. Однак, механічний стан датчика не погіршується у прохідній смузі застосування (від постійної до кількох сотень Гц). На фіг. 7А, 7В та 7С представлено часткові види у перспективі датчика ТА згідно з фіг. 5, обмежені резонатором 3, пластинками 81 та 82 та рухомими масивними частинами 2 та 4, і призначені для показу основних зусиль, що прикладаються рухомою частиною 2 до резонатора та пластинок, коли датчик піддається кожній з трьох просторових складових прискорення. Порівняно з цими механічними силами рухомої частини 2, не показані частини, такі, як нерухома частина 1, гнучка рама 5 та два сполучних елементи 6 та 7, мають вплив, яким практично можна знехтувати й, таким чином, рухома частина 4 може розглядатися як прямо закріплена, наприклад, на основі. З посиланням на фіг. 7А, прискорення Г1, яке прикладається перпендикулярно сторонам пластини матеріалу, викликає на резонаторі 3 подовжню силу розтягнення P1, а на кожній з пластинок 81 та 82 подовжню силу стиснення Q1, поперечну силу згину N1 та момент поперечного згину V1. Існують також інші механічні сили (не представлені), що прикладаються рухомою частиною 2 на резонатор та пластинки, але їхня роль не є головною у роботі датчика. Цими іншими силами ми в даному разі нехтуємо для спрощення представлення явищ. Вираз сили P1 отримується з системи рівнянь, яка виражає рівновагу рухомої частини 2, а також механічний стан пластинок 81 та 82. Отримуємо інтенсивність сили, яка є пропорційною прискоренню Г1 і практично дорівнює: P1=[HG/(E-E3)]МГ1 де: HG є відстанню між двома площинами, перпендикулярними осі Z'Z, перша площина проходить по половині довжини пластинок 81 та 82, а друга площина по центру гравітації G рухомої частини 2; М є масою рухомої частини 2. Співвідношення [HG/(E-E3)], коефіцієнт множення МГ1 у виразі сили Р1 може сягати кількох одиниць, наприклад, п'яти. 7 42849 ня поєднання двох датчиків згідно з даним винаходом далі будуть пояснені більш докладно. На фіг. 8А, 8В, 8С, 8D та 8Е показано інші способи реалізації датчика згідно з даним винаходом. З посиланням на фіг. 8А, можна зазначити, що датчик ТАа відрізняється від датчика ТА згідно з фіг. 5 тим, що сполучний елемент 6а, розмір L6a якого взято по ширині La датчика ТАа, є значно більшим за розмір L6. Розмір L6a є значно меншим за розмір L4a рухомої частини 4а датчика ТАа, взятий по La. Вигідність подібної реалізації винаходу полягає у підвищеній механічній міцності монолітного корпусу датчика, якої надає велика жорсткість сполучного елементу ба датчика ТАа, і, таким чином, у підвищеній власній частоті корпусу датчика. На відміну від цієї переваги, механічна фільтрація вібрацій резонатора За датчика ТАа є менш ефективною, ніж фільтрація резонатора 3 датчика ТА, але все ж залишається значно ефективно порівняно з відомими акселерометрами. На фіг. 8В показано датчик ТАb, який відрізняється від датчика ТА згідно з фігурою 5 тим, що сполучний елемент 7b, розмір L7b якого взято по ширині Lb датчика ТАb, є значно меншим за ширину Lb датчика. Порівняно з датчиком ТА, переваги та недоліки цього третього способу реалізації винаходу є практично такими самими, що й у датчика ТАа згідно з фіг. 8А. У галузях застосування, де критерій механічної міцності є домінуючим, цікавим є виготовлення датчика ТАс, як це показано на фіг. 8С, у якому два сполучних елементи 6с та 7 з мають ту ж саму будову, що й сполучний елемент ба датчика ТАа згідно з фіг. 8А та сполучний елемент 7b датчика ТАb згідно з фіг. 8В. Механічна фільтрація вібрацій резонатора 3с датчика ТАс забезпечується, таким чином, практично лише гнучкістю ділянок 51с та 52с рами 5с датчика ТАс, але залишається більш ефективною, ніж у відомих акселерометрів. На фіг. 8D показано датчик ТАd, спроектований переважно для застосування у галузях, де важливим критерієм є мініатюризація. Датчик ТАd відрізняється від датчика ТА згідно з фіг. 5 здебільшого розташуванням нерухомої частини 1d всередині гнучкої рами 5d і між ділянкою рами 54d та рухомої частиною 2d датчика TAd. Таким чином, ця рама 5d утворює контур датчика TAd. Таке розташування зменшує розмір датчика, зберігаючи довжину Н5 ділянок рами 51d та 52d, достатню для збереження гнучкості, необхідної для отримання дуже доброї механічної фільтрації вібрацій резонатора 3d датчика TAd. Ефективність механічної фільтрації вібрацій резонатора полягає здебільшого у гнучкості двох ділянок гнучкої рами, паралельних центральній подовжній осі Z'Z датчика, тобто паралельних осі, що проходить через кінцеві частини резонатора. Дійсно, ці дві ділянки являють, порівняно з двома іншими ділянками гнучкої рами та двома сполучними елементами, найбільшу гнучкість стосовно механічних навантажень, що викликаються вібраціями резонатора. У загальному плані, надійна робота датчика згідно з даним винаходом вимагає принаймні двох гнучких ділянок практично паралелепіпедної форми, подовжні осі яких проходять по двох кінцевих частинах резонатора. Рама у формі кільця, яка є аналогічною периферичній частині R2 Необхідно зазначити, що вираз сили Р1 є алгебраїчним, що пояснює той факт, що сила Р1 змінює напрям, стаючи, таким чином, силою подовжнього стиснення резонатора 3, при зміні напрямку прискоренням Г1. Дія сили P1 розтягнення або стиснення, якої зазнає резонатор, є причиною зміни (DF)1 і його резонансної частоти F, відповідно, зменшення або збільшення: (DF)1=kP1=k[HG/(E-E3)]МГ1 де: k є коефіцієнтом, що залежить від природи вібрацій резонатора, наприклад, згинання або скручування, від геометрії резонатора та від характеристик матеріалу, наприклад, кварцу або кремнію. Таким чином, зміни частоти F є пропорційними прискоренню Г1, що прикладається перпендикулярно сторонам пластини матеріалу. Наприклад, можна зазначити, що можна отримати зміну частоти у 20 Гц/г для резонатора, що вібрує по згинанню при 50000 Гц та датчика, спроектованого для вимірювання до 100 г. Розміри корпусу монолітного датчика, з посиланням на фіг. 5, становлять Н1+Н7+Н5=6 мм, L=4 мм та Е=0,4 мм. З посиланням на фіг. 7В, прискорення Г2, що прикладається паралельно осі Z'Z, викликає на резонаторі 3 подовжню силу розтягнення Р2, яка практично дорівнює (1/2) МГ2 а на кожній з пластинок 81 та 82 подовжню силу стиснення Q2, яка практично дорівнює (1/4) МГ2. Ці сили змінюють напрямок при зміні напрямку прискорення Г2. Аналогічно наведеному вище прискорення Г1, сила Р2 розтягнення або стиснення, дії якої піддається резонатор, є причиною зміни (DF)2 його резонансної частоти F, відповідно, зменшення або збільшення: (DF)2=kP2=k(1/2)МГ2. Зміна частоти (DF)2, як правило, є меншою за зміну частоти (DF)1, для однакової сили прискорень Г1 та Г2. Таким чином, повертаючись до попереднього прикладу, де (DF)1=20 Гц/г, можна отримати (DF)2=2 Гц/г. З посиланням на фіг. 7С необхідно зазначити, що прискорення Г3, що прикладається перпендикулярно площині PS датчика, викликає переважно сили N5 та V3, перпендикулярні осі Z'Z на кожну з пластинок, але практично не викликає сили розтягнення або стиснення на резонатор. В результаті зміна (DF)3 його частоти F є практично нульовою. Знаючи зміни частоти F резонатора для трьох складових Г1, Г2 та Г3 прискорення, краще поєднувати два датчики згідно з даним винаходом. Положення другого датчика виводиться з положення першого датчика поворотом на 180° навколо осі, паралельної осі Z'Z, а нерухомі частини двох датчиків сполучені зі спільною основою. Таким чином, це поєднання двох датчиків згідно з даним винаходом складає акселерометр з диференціальним виходом, чутливий напрямок якого є перпендикулярним сторонам двох пластин матеріалу, і який має перевагу порівняно з відомими диференціальними акселерометрами, оскільки усуває механічне поєднання вібрацій резонаторів двох датчиків. Ці вібрації, таким чином, більше не впливають одна на одну, що поліпшує точність вимірювання диференціальної частоти, і, таким чином, точність вимірювання прискорення. Ці аспекти застосуван 8 42849 відомого резонатора, показаного на фіг. 4, не може бути придатною для надійної роботи датчика згідно з даним винаходом. На фіг. 8Е показано датчик ТАе, монолітний корпус якого зроблено з кварцу. Пристрої приведення у вібрацію резонатора 3е у датчику ТАе є аналогічними пристроям вібруючих пластин 31 та 32 першого з відомих акселерометрів СА', показаного на фіг. 1, і таким чином, частково адаптованими до вібрацій по згину паралельно сторонам пластини матеріалу. Датчик ТАе відрізняється від датчика ТА, показаного на фіг. 5 здебільшого своєю загальною дископодібною формою та формою частин кільця ділянок 53е та 54е гнучкої рами 5е, а також U-подібною формою нерухомої частини 1е. Ця нерухома частина складається з основної ділянки 10е у вигляді частини кільця, що проходить практично вздовж ділянки 54е гнучкої рами й з'єднаної зі сполучним елементом 7е, та з двох гілок 11е та 12е у вигляді дископодібних сегментів, що простягаються практично вздовж ділянок 51е та 52е рами й від кінцевих частин основної ділянки 10е. Таким чином, гнучка рама 5е розташована всередині U-подібної форми нерухомої частини 1е. Гілки 11е та 12е закріплюються на основі коробки ВАе, наприклад, шляхом склеювання. Порівняно з паралелепіпедною формою нерухомої частини 1 датчика ТА, показаного на фіг. 5, U-подібна форма нерухомої частини 1е датчика ТАе має три таких переваги: площину розташування датчика ТАе на основі ВАе краще визначено для того ж самого розміру коробки; у разі необхідності поліпшення механічної міцності датчика зручним є використання двох фланців, які спираються на сторони дископодібних гілок 11е та 12е, і які обмежують биття рухомої масивної частини 2е визначеною величиною; кріплення датчика ТАе до основи ВАе полегшується тим, що центр маси датчика розташовано між опорними поверхнями на основі, і немає необхідності застосування пристрою утримання датчика на основі. Стосовно механічної фільтрації вібрацій по згинанню резонатора 3е датчика ТАе необхідно зазначити, що ефективність датчика ТАе практично дорівнює ефективності датчика ТА у зв'язку з достатньою гнучкістю ділянок 51е та 52е. Як показано на фіг. 8Е, пристрої приведення у вібрацію резонатора 3е виготовлено у вигляді двох металевих електродів 31е та 32е, що мають протилежні полярності й збуджують, завдяки п'єзоелектричному ефектові, вібрації по згину резонатора 3е. Електроди 31е та 32е розташовано на боці резонатора, який повернуто до зовнішнього боку корпусу датчика і їхню "тридоріжкову" конфігурацію описано у заявці на винахід FR-A-2685964 на ім'я заявника. Електричні сполучення між електродами 31е та 32е та герметичні виводи (не показані) основи коробки робляться на рівні закріплених гілок 11е та 12е зварюванням на відповідних контактних металевих ділянках 33е та 34е практично прямокутної форми. Як показано на фіг. 8Е, металеві ділянки 33е та 34е з'єднано з відповідними електродами 31 е та 32е двома відповідними металевими провідними стрічками 35е та З6е, що утримуються видимою стороною рухомої частини 4е, гнучкої рами 5е, сполучних елементів 6е та 7е та основної ділянки 10е. Електроди, сполучні стрічки та контактні ділянки можуть бути отримані одночасно шляхом гравіювання металевого шару, що прилягає до видимої сторони кварцової пластини, за допомогою класичних фотолітографічних процесів. Цим прилеглим металевим шаром може бути шар, який до цього був захисною маскою для обробки монолітного корпусу датчика. Герметичні виводи основи коробки, підключені до електродів 31е та 32е, електрично сполучаються з двома клемами коливального ланцюга (не показаного), на виході з якого видається переміжний сигнал, зміни частоти якого відображають зміни прискорення, що прикладається до датчика. Як вказано вище, винахід стосується також акселерометру з диференціальним виходом, який складається з двох датчиків прискорення згідно з даним винаходом, при цьому, положення другого датчика, що випливає з положення першого датчика повертанням на 180° навколо осі, паралельної осі, що проходить через дві кінцеві частини резонатора, при цьому нерухомі частини двох датчиків сполучено зі спільною основою. Згідно зі способами виготовлення, показаними на фіг. 5, 8А, 8В, 8С, 8D та 8Е, вісь, що проходить через кінцеві частини резонатора, є паралельною осі Z'Z датчика. Таким чином, у поєднанні двох датчиків згідно з даним винаходом, положення другого датчика випливає з положення першого датчика повертанням на 180° навколо осі, паралельної осі Z'Z. З посиланням на фіг. 9, необхідно зазначити, що диференціальний акселерометр AD складається з двох датчиків ТАе1 та ТАе2, практично ідентичних датчикові ТАе згідно з фіг. 8Е, при цьому дископодібні гілки 11е1 та 12е1 датчика ТАе1 та 11е2 та 12е2 датчика ТАе2 сполучені зі спільною основою ВАе. Згідно зі способом виготовлення, показаним на фігурі 9, датчики ТАе1 та ТАе2, розташовані симетрично один одному відносно площини, паралельної сторонам двох пластин матеріалу. Таке розташування є особливим випадком розташування згідно з даним винаходом і не розглядається як таке, що обмежує винахід. Датчик ТАе вибрано як приклад. Дія даної заявки на винахід поширюється на поєднання двох практично ідентичних датчиків, одним з яких є будь-який з датчиків ТА, ТАа, ТАb, ТАе та TAd згідно з фіг. 5, 8А, 8В, 8С та 8D і в цілому на поєднання двох датчиків згідно з даним винаходом. З посиланням на фіг. 9, необхідно зазначити, що металеві ділянки 33е, та 34е1 датчика ТАе сполучаються з двома першими клемами коливального контуру 911 за допомогою двох дротів 371 та 381. Ідентично розташовані на невидимому боці датчика ТАе2, електроди, що сполучають стрічки та контактні ділянки, є сполученими з іншим коливальним ланцюгом 912. Виходи двох ланцюгів 91, та 91 а сполучені з пристроєм вимірювання диференціальної частоти, що включає ланцюг віднімання частоти 92 та частотомір 93, при цьому частота (F1-F2), що вимірюється частотоміром 93, є показником вимірюваного прискорення. 9 42849 ній пластині матеріалу однорідної товщини. Будова цих датчиків схожа на будову датчика ТА, показаного на фіг. 5. Згідно зі способом виготовлення, показаним на фіг. 10, диференціальний акселерометр AD' утворює монолітний корпус, що має форму паралелепіпеду. Рухомі частини 21, 41 та 22, 42 рами 51 та 52, та нерухома частина 1’ двох датчиків ТА’ та ТА2' мають співплощинні сторони, що збігаються з двома сторонами пластини. Резонатор 31 одного ТА1’ з датчиків та пластинки 812 та 822 іншого датчика ТА2' вирівнюються по одній з двох сторін пластини; резонатор 32 іншого датчика TA2' та пластинки 811 та 821 першого датчика ТА1’ вирівнюються по іншій стороні пластини. Центральна вісь Y'Y, паралельна сторонам пластини, утворює вісь симетрії акселерометра AD'. Згідно з показаним способом виготовлення подовжні осі Z1’Z1 та Z2’Z2 датчиків ТА1’ та ТА2' є паралельними осі Y'Y, і датчики ТА1’ та TA2' є симетричними один одному відносно осі Y'Y, що являє собою особливий випадок розташування згідно з даним винаходом. Згідно з зазначеним способом виготовлення нерухома частина 1’ диференціального акселерометра AD' має передній контур у формі 1, що має подовжню гілку, спрямовану на вісь Y'Y та одну з поперечних гілок, з'єднану зі сполучними елементами 71 та 72 датчиків ТА1’ та TA2'. Переваги цієї I-подібної форми нерухомої частини 1’ є аналогічними перевагам U-подібної форми нерухомої частини 1е датчика ТАе, показаного на фіг. 8Е; Добре визначена площина розміщення, зручність використання двох фланців, що являють собою підпори, а також зручність кріплення цієї нерухомої частини на основі. Як і для диференціального акселерометра AD, показаного на фіг. 9, чутливий напрямок диференціального датчика AD' є перпендикулярним сторонам пластини матеріалу, і перевагою датчика AD', порівняно з відомими датчиками, є поліпшена точність вимірювання. Порівняно з акселерометром AD, розміщення датчика AD' у коробці є спрощеним, і це є перевагою при визначальних критеріях мініатюризації та низької собівартості. Навпаки, акселерометр AD має перевагу у виборі з двох датчиків, що його складають, з метою ще більшого поліпшення точності вимірювання. Роботу диференціального акселерометру AD показано з посиланням на попередні пояснення щодо фігур 7А, 7В та 7С. З посиланням на фіг. 9, необхідно зазначити, що прискорення F1, яке прикладається перпендикулярно до сторін двох пластин матеріалу, викликає на резонаторах 3е1 та 3е2, подовжні сили (не показані) розтягнення та стиснення однакової величини, якщо датчики ТАе1 та TAe2 є ідентичними. Ці подовжні сили є причиною збільшення (DF)1 частоти F1 резонатора 3е1 та зменшення на ту ж саму величину частоти F2, резонатора 3е2. Вираз зміни частоти (DF)1 було описано раніше залежно від механічних та геометричних характеристик датчика. Диференціальна частота (F1-F2), таким чином, піддається збільшенню: D(F1-F2)=2(DF)1. Прискорення Г2, що прикладається паралельно осям Z1’Z1 та Z2'Z2 датчиків ТАс1 та Тас2, викликає на резонаторах 3с1 та 3c2 подовжні сили (не показані) розтягнення і такої ж самої інтенсивності, які є причиною такого ж самого збільшення (DF)2 їхніх резонансних частот. Таким чином, диференціальна частота (F1-F2) не піддається зміні, пов'язаній з прискоренням Г2. Прискорення Г3, що прикладається перпендикулярно до двох попередніх напрямків прискорення, не викликає виникнення подовжніх сил на резонаторах 3е1 та 3e2. Результатом є те, що частоти F1 та F2, а також диференціальна частота (F1-F2) не піддаються зміні, пов'язаній з прискоренням Г3. Таким чином, чутливий напрямок диференціального акселерометра AD є перпендикулярним сторонам двох пластин матеріалу. За рахунок ефективності механічної фільтрації вібрацій кожним резонатором 3е1 та 3е2 диференціальний акселерометр AD має дві переваги порівняно з відомими акселерометрами. По-перше, коефіцієнти перенапруження резонаторів не погіршуються і, по-друге, усувається механічне поєднання їхніх вібрацій. Ці дві переваги надають поліпшеної точності вимірювання акселерометрові AD. На фіг. 10 показано диференціальний акселерометр AD', що складається з двох практично ідентичних датчиків ТА1’ та ТА2', виготовлених на од 10 42849 Фіг. 1 11 42849 Фіг. 2 Фіг. 3 Фіг. 4 12 42849 Фіг. 5 13 42849 Фіг. 6A 14 42849 Фіг. 6B 15 42849 Фіг. 7A Фіг. 7B 16 42849 Фіг. 7C Фіг. 8B Фіг. 8A 17 42849 Фіг. 8D Фіг. 8C Фіг. 8E 18 42849 Фіг. 9 19 42849 Фіг. 10 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 20
ДивитисяДодаткова інформація
Назва патенту англійськоюSolid detector of acceleration and accelerometer
Автори англійськоюTraon Olivier Leu, Janiaoud Denis, Muller Serge
Назва патенту російськоюМонолитный датчик ускорения и акселерометр
Автори російськоюТраон Оливер Ле, Джаниауд Денис, Мюллер Серж
МПК / Мітки
МПК: H01L 29/84, G01P 15/08
Мітки: акселерометр, датчик, прискорення, монолітний
Код посилання
<a href="https://ua.patents.su/20-42849-monolitnijj-datchik-priskorennya-ta-akselerometr.html" target="_blank" rel="follow" title="База патентів України">Монолітний датчик прискорення та акселерометр</a>
Подільский акселерометр лінійного прискорення
Номер патенту: 2641
Опубліковано: 26.12.1994
Автори: Музичук Федір Максимович, Музичук Антон Максимович
МПК: G01P 15/18
Мітки: акселерометр, подільский, прискорення, лінійного
Формула / Реферат:
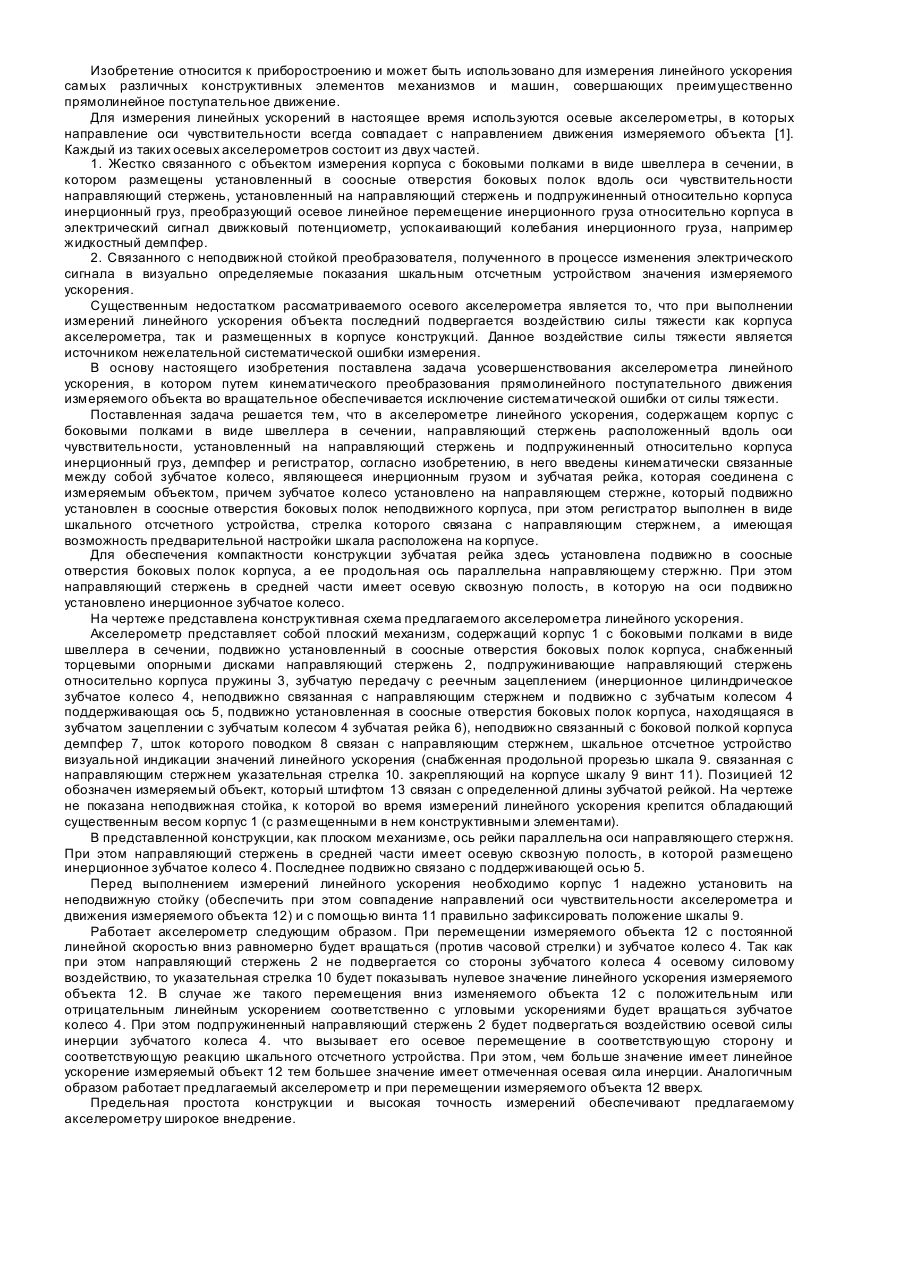
1. Подольский акселерометр линейного ускорения, содержащий корпус с боковыми полками в виде швеллера в сечении, направляющий стержень, расположенный вдоль оси чувствительности, установленный на направляющий стержень и подпружиненный относительно корпуса инерционный груз, демпфер и регистратор, отличающийся тем, что в него введены кинематически связанные между собой зубчатое колесо, являющееся инерционным грузом и зубчатая рейка, которая...
Інтегральний датчик прискорення та спосіб його виготовлення
Номер патенту: 29594
Опубліковано: 15.11.2000
Автори: Горбань Олександр Миколайович, Кравчина Віталій Вікторович
МПК: G01P 15/12
Мітки: прискорення, спосіб, інтегральній, датчик, виготовлення
Текст:
...толщиной 100-800 мкм, что обеспечивает возможность точного задания емкостного зазора и крепления датчика. Упругие балки содержат интегральные полупроводниковые приборы, что позволяет определять ускорение по электрическим характеристикам этих приборов независимо от определения ускорения по изменению емкости емкостного зазора. Пробная масса имеет не две, как в прототипе, а одну степень свободы, что позволяет точнее определить ускорение, это...
П’єзоелектричний датчик тиску
Номер патенту: 35761
Опубліковано: 16.04.2001
Автори: Бикова Олена Валентинівна, Палагін Володимир Васильович, Мусієнко Максим Павлович, Шарапов Валерій Михайлович, Сарвар Іван, Чудаєва Ія Борисівна
МПК: G01L 11/00, G01L 9/08, G01L 23/00
Мітки: датчик, п'єзоелектричний, тиску
Формула / Реферат:
П'єзоелектричний датчик тиску, що складається з випромінювального та приймального п'єзоелектричних резонаторів, генератора електричних коливань та вимірювального приладу, який відрізняється тим, що випромінювальний та приймальний резонатори виконані у вигляді полих сферичних п'єзоелементів, випромінювальний резонатор знаходиться всередені приймального.
П’єзоелектричний датчик тиску
Номер патенту: 35762
Опубліковано: 16.04.2001
Автори: Сарвар Іван, Мусієнко Максим Павлович, Шарапов Валерій Михайлович, Ситник Олександр Олексійович, Бикова Олена Валентинівна, Чудаєва Ія Борисівна
МПК: G01L 11/00, H01L 41/08
Мітки: п'єзоелектричний, тиску, датчик
Формула / Реферат:
П'єзоелектричний датчик тиску, що складається з випромінювального та приймального п'єзоелектричних резонаторів, генератора електричних коливань та вимірювального приладу, який відрізняється тим, що випромінювальний резонатор обладнано ультразвуковим концентратором з пластиною, закріпленою на основі меншого перетину, а приймальний резонатор виконан у вигляді біморфного елемента.
П’єзоелектричний датчик тиску

Номер патенту: 35763
Опубліковано: 16.04.2001
Автори: Сарвар Іван, Чудаєва Ія Борисівна, Лега Юрій Григорович, Мусієнко Максим Павлович, Бикова Олена Валентинівна, Шарапов Валерій Михайлович
МПК: G01L 9/08, G01L 23/00, G01L 11/00
Мітки: п'єзоелектричний, тиску, датчик
Формула / Реферат:
П'єзоелектричний датчик тиску, що складається з випромінювального та приймального п'єзоелектричних резонаторів, генератора електричних коливань та вимірювального приладу, який відрізняється тим, що випромінювальний та приймальний резонатори виконані у вигляді полих циліндрів з електродами на циліндричних поверхнях, причому випромінювальний резонатор встановлений всередені приймального резонатора.
Попередній патент: Пристрій для захисту від електромагнітного випромінювання і спосіб його виготовлення
Наступний патент: Спосіб одержання кормового монокальційфосфату
Випадковий патент: Оклюзіограф