Спосіб пошуку постраждалих під завалами з урахуванням довільної орієнтації антени радіомаяка

Формула / Реферат
Спосіб пошуку постраждалих під завалами з урахуванням довільної орієнтації антени радіомаяка, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму деякогопорогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкта пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, при цьому безперервні низькочастотні сигнали, які виробляють першим і другим низькочастотними генераторами, роблять різними за частотою, чим забезпечують розв'язку низькочастотних підсилювальних трактів радіомаяка і пошукового пристрою, при цьому змінне магнітне поле з частотою f2 уловлюють четвертою нерухомою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють п'ятою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють шостою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж першому пошуковому пристрої, причому подовжні осі четвертої, п'ятої і шостої котушок першого пошукового пристрою розташовують перпендикулярно одна щодо одної при довільній їх орієнтації в просторі, причому це ж змінне магнітне поле з частотою f2 уловлюють сьомою нерухомою котушкою з феромагнітним сердечником, яку розташовують в другому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють восьмою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж другому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють дев'ятою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж другому пошуковому пристрої, причому подовжні осі сьомої, восьмої і дев'ятої котушок другого пошукового пристрою розташовують перпендикулярно одна щодо одної при довільній їх орієнтації в просторі, причому це ж змінне магнітне поле з частотою f2 уловлюють десятою нерухомою котушкою з феромагнітним сердечником, яку розташовують в третьому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють одинадцятою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж третьому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють дванадцятою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж третьому пошуковому пристрої, причому подовжні осі десятої, одинадцятої і дванадцятої котушок третього пошукового пристрою розташовують перпендикулярно одна щодо одної при довільній їх орієнтації в просторі, причому самі пошукові пристрої розташовують один щодо одного на деякій відомій відстані, причому пошукові пристрої розташовують не на одній лінії, при цьому в кожному з трьох пошукових пристроїв проводять вузькосмугове підсилення низькочастотних сигналів, що приймаються нерухомими котушками, при цьому в кожному пошуковому пристрої всі три прийняті і підсилені сигнали змінного струму підносять до квадрата, потім усі три піднесені до квадрата сигнали складають докупи і з отриманої суми добувають квадратний корінь, внаслідок чого отримують сигнал постійного струму, рівень якого відповідає максимальному рівню низькочастотного сигналу, що приймається від радіомаяка об'єкта пошуку, незалежно від положення в просторі третьої котушки з феромагнітним сердечником радіомаяка об'єкта пошуку, при цьому в кожному з трьох пошукових пристроїв здійснюють вимірювання рівня цього сигналу, після чого в кожному з трьох пошукових пристроїв ці заміряні рівні сигналів по калібрувальних номограмах переводять у відстані до об'єкта пошуку, при цьому отримують три відстані до об'єкта пошуку від кожного їх трьох пошукових пристроїв, після чого розв'язують звичайну тригонометричну задачу і від кожного з пошукових пристроїв отримують однозначно азимут об'єкта пошуку, при цьому використовують один з отриманих азимутів і відстань до об'єкта пошуку для здійснення рятувальних заходів від того пошукового пристрою, від якого вживати рятувальні заходи найефективніше.
Текст
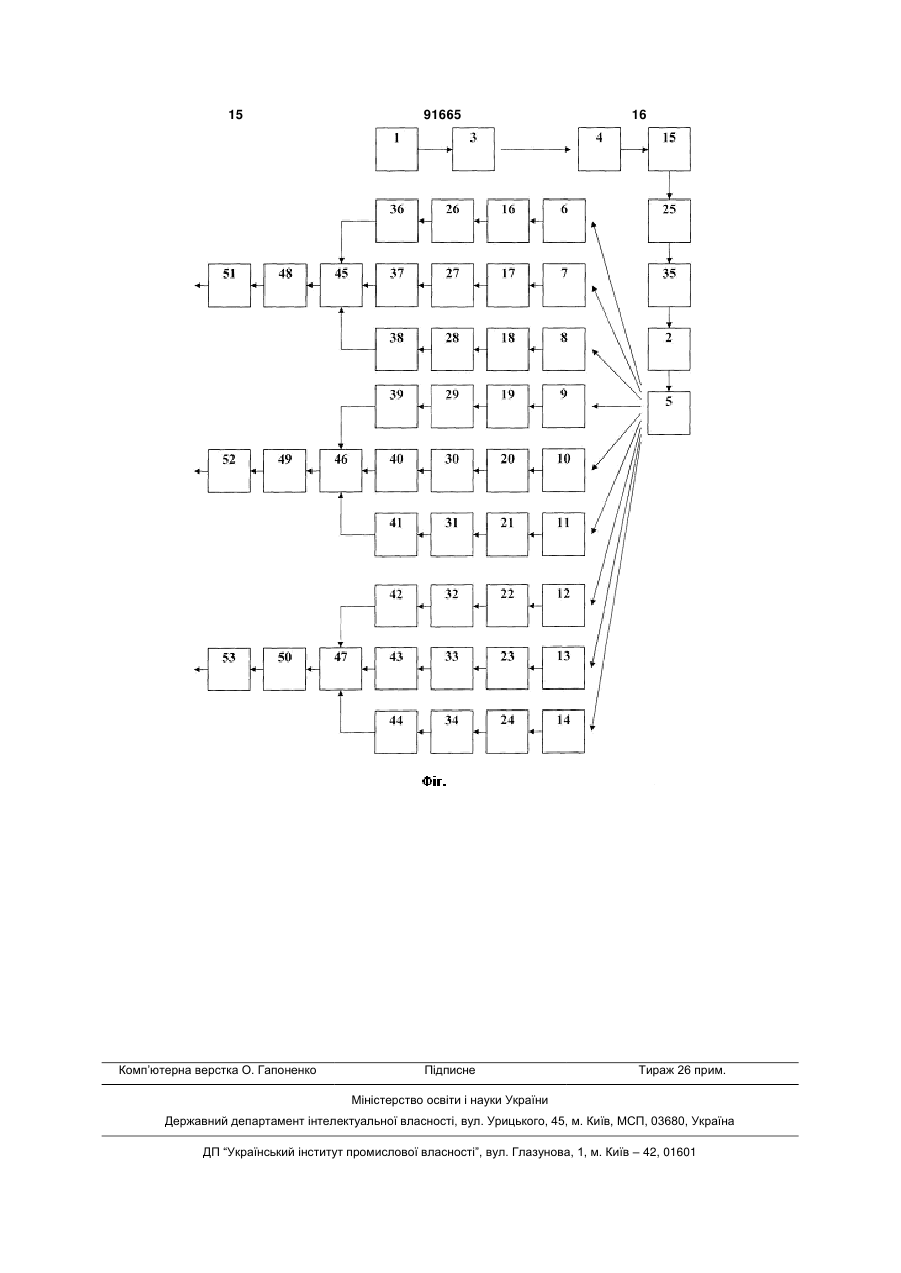
Спосіб пошуку постраждалих під завалами з урахуванням довільної орієнтації антени радіомаяка, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму деякого порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкта пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, 2 (19) 1 3 91665 4 третьому пошуковому пристрої, причому подовжні сигналу, що приймається від радіомаяка об'єкта осі десятої, одинадцятої і дванадцятої котушок пошуку, незалежно від положення в просторі третретього пошукового пристрою розташовують пертьої котушки з феромагнітним сердечником радіопендикулярно одна щодо одної при довільній їх маяка об'єкта пошуку, при цьому в кожному з трьох орієнтації в просторі, причому самі пошукові припошукових пристроїв здійснюють вимірювання строї розташовують один щодо одного на деякій рівня цього сигналу, після чого в кожному з трьох відомій відстані, причому пошукові пристрої розпошукових пристроїв ці заміряні рівні сигналів по ташовують не на одній лінії, при цьому в кожному з калібрувальних номограмах переводять у відстані трьох пошукових пристроїв проводять вузькосмудо об'єкта пошуку, при цьому отримують три відсгове підсилення низькочастотних сигналів, що тані до об'єкта пошуку від кожного їх трьох пошуприймаються нерухомими котушками, при цьому в кових пристроїв, після чого розв'язують звичайну кожному пошуковому пристрої всі три прийняті і тригонометричну задачу і від кожного з пошукових підсилені сигнали змінного струму підносять до пристроїв отримують однозначно азимут об'єкта квадрата, потім усі три піднесені до квадрата сигпошуку, при цьому використовують один з отриманали складають докупи і з отриманої суми добуних азимутів і відстань до об'єкта пошуку для здійвають квадратний корінь, внаслідок чого отримуснення рятувальних заходів від того пошукового ють сигнал постійного струму, рівень якого пристрою, від якого вживати рятувальні заходи відповідає максимальному рівню низькочастотного найефективніше. Винахід належить до галузі забезпечення безпеки робіт в гірничій промисловості і може використовуватися для визначення місця розташування персоналу під завалами в шахтах. Відомі способи автоматизованого визначення місця розташування персоналу, наприклад «Уніфікована телекомунікаційна система УТАС» яка містить кабель, сервер системи позиціонування, програмне забезпечення системи (У книзі «Способи і засоби створення безпечних і здорових умов праці у вугільних шахтах», збірка наукових праць МакНДІ Макіївка, 2005 р. - с. 323-333) або «Система автоматизованого табельного обліку і визначення місця розташування персоналу і техніки на шахтах і копальнях в комплексі «Талнах», яка містить: контролери, зчитувачі системи позиціонування, випромінюючий кабель, сервер системи позиціонування, програмне забезпечення системи (У журналі «Устаткування для підприємств ПЕК» №8, М., 2006 p., опубл. 10.08.2006). Проте позиціонування об'єктів (персоналу і транспортних засобів) за цими системами здійснюється з точністю, обумовленою дискретністю установки зчитувачів системи позиціонування і реально складає 100-200 м. Крім того, система працює лише в межах прямої видимості об'єкта позиціонування і зчитувача і практично непридатна в разі виникнення обвалу гірської породи, що є непереборною перешкодою для радіосигналів з прийнятими в описаних системах довжинами хвиль. Найбільш близьким до передбачуваного винаходу є «Спосіб пошуку постраждалих під завалами», описаний в заявці на патент України а 200905262 від 26.05.2009, позитивний висновок по якій винесено 3.02.2010. За цим способом визначення місця розташування персоналу шахти під завалами кожного працівника шахти забезпечують радіомаяком, а пошукову групу забезпечують пристроєм активації радіомаяків і пристроями пошуку. При цьому до складу пристрою активації вводять: перший генератор першої низької частоти, першу нерухому котушку з феромагнітним сердечником. До складу радіомаяка вводять: нерухомі другу і третю котуш ки з феромагнітними сердечниками, вузькосмуговий підсилювач першої низької частоти, детектор несучої, пороговий пристрій, другий генератор другої низької частоти. До складу трьох пошукових пристроїв, по дві одиниці в кожен, вводять: нерухомі котушки з феромагнітними сердечниками, розташовані в одній горизонтальній площині, подовжні оci яких взаємно перпендикулярні, вузькосмугові підсилювачі сигналів другої низької частоти, випрямлячі, схеми зведення сигналів в квадрат, окрім цього до складу пошукових пристроїв, по одній одиниці в кожен, вводять: суматори двох сигналів, схеми витягання квадратного кореня і вимірювачі рівня. За описаним способом завдання вирішується завдяки тому, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1. Першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку. Змінне магнітне поле з частотою f1, що випромінюють першою котушкою з феромагнітним сердечником, уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкта пошуку. Сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень. При перевищенні випрямленого сигналу постійного струму деякою порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкта пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2. Змінне магнітне поле з частотою f2, що випромінюють третьою нерухомою котушкою з феромагнітним сердечником, уловлюють четвертою нерухомою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої. Це ж змінне магнітне поле з частотою f2 уловлю 5 91665 6 ють п'ятою нерухомою котушкою з феромагнітним мається, від відстані. Проте при наближенні цього сердечником, яку розташовують в цьому ж першокута до 90°, яке також має певну ймовірність при му пошуковому пристрої. Подовжні осі четвертої і виникненні надзвичайної ситуації, помилка у вип'ятої котушок розташовують перпендикулярно значенні дальності буде неприпустимо великою. одну щодо одної в горизонтальній площині. Далі Це спричиняє зниження ефективності пошуку люце ж змінне магнітне поле з частотою f2 уловлюють дей. шостою нерухомою котушкою з феромагнітним У той же час украй необхідно ефективно вирісердечником, яку розташовують в другому пошушувати завдання визначення азимута об'єкта поковому пристрої. Це ж змінне магнітне поле з часшуку і відстані до нього з високою точністю, тобто тотою f2 уловлюють сьомою нерухомою котушкою проводити пошук людей, що перебувають під заз феромагнітним сердечником, яку розташовують валами гірських порід. Велика смертність серед в цьому ж другому пошуковому пристрої. Подовжні персоналу вугільних шахт обумовлена саме тим, осі шостої і сьомої котушок розташовують перпенщо при існуючому стані справ швидко і точно віддикулярно одну щодо одної у горизонтальній плошукати постраждалих людей не є можливим. щині. Далі це ж змінне магнітне поле з частотою f2 У основу винаходу поставлено завдання виуловлюють восьмою нерухомою котушкою з фезначення азимута і відстані до об'єкта пошуку люромагнітним сердечником, яку розташовують в дини, що знаходиться в товщі гірських порід. Вона третьому пошуковому пристрої. Це ж змінне магнівирішується завдяки тому, що спочатку генерують тне поле з частотою f2 уловлюють дев'ятою нерубезперервні низькочастотні коливання з частотою хомою котушкою з феромагнітним сердечником, f1, причому ці коливання подають на клеми першої яку розташовують в цьому ж третьому пошуковому нерухомої котушки з феромагнітним сердечником і пристрої. Подовжні осі восьмої і дев'ятої котушок випромінюють тим самим змінне магнітне поле з розташовують перпендикулярно одна щодо одної частотою f1, при цьому першу котушку з феромагу горизонтальній площині. Самі пошукові пристрої нітним сердечником розташовують в безпосередрозташовують один щодо одного на деякій відомій ній близькості від передбачуваного об’єкта пошуку, відстані, причому пошукові пристрої розташовують при цьому змінне магнітне поле з частотою f1 улоне на одній лінії, причому кожну пару взаємно первлюють другою нерухомою котушкою з феромагніпендикулярних котушок пошукових пристроїв орієтним сердечником, яку встановлюють в радіомаянтують на площині довільно. ку об'єкта пошуку, після чого сигнал, що У кожному з трьох пошукових пристроїв прознімається з клем другої котушки з феромагнітним водять вузькосмугове підсилення низькочастотних сердечником, підсилюють у вузькій смузі частот, сигналів, що приймаються нерухомими котушками. випрямляють і оцінюють його рівень, причому при У кожному пошуковому пристрої обидва прийняті і перевищенні випрямленого сигналу постійного підсилені сигнали змінного струму зводять у квадструму деякого порогового рівня починають генерат, потім зведені в квадрат сигнали складають рувати безперервні низькочастотні коливання з докупи і з отриманої суми витягують квадратний частотою f2, які подають на клеми третьої нерухокорінь, внаслідок чого отримують сигнал постійномої котушки з феромагнітним сердечником, яку го струму, рівень якого відповідає максимальному також розташовують в радіомаяку об'єкта пошуку, і рівню низькочастотного сигналу, що приймається випромінюють тим самим змінне магнітне поле з від радіомаяка об'єкта пошуку. У кожному з трьох частотою f2, при цьому безперервні низькочастотні пошукових пристроїв здійснюють вимірювання сигнали, які виробляють першим і другим низькорівня цього сигналу, після чого в кожному із трьох частотними генераторами, роблять різними за пошукових пристроїв ці виміряні рівні сигналів за частотою, чим забезпечують розв'язку низькочаскалібрувальними номограмами переводять у відстотних підсилювальних трактів радіомаяка і пошутані до об'єкта пошуку, при цьому отримують три кового пристрою, при цьому змінне магнітне поле з відстані до об'єкта пошуку від кожного з трьох почастотою f2 уловлюють четвертою нерухомою кошукових пристроїв. Далі вирішують звичайну тритушкою з феромагнітним сердечником, яку розтагонометричну задачу і від кожного з пошукових шовують в першому пошуковому пристрої, причопристроїв отримують однозначно азимут об'єкта му це ж змінне магнітне поле з частотою f2 пошуку, при цьому використовують один з отримауловлюють п'ятою нерухомою котушкою з фероманих азимутів і відстань до об'єкта пошуку для здійгнітним сердечником, яку розташовують в цьому ж снення рятувальних заходів від того пошукового першому пошуковому пристрої, причому це ж пристрою, від якого вживати рятувальні заходи змінне магнітне поле з частотою f2 уловлюють шонайефективніше. стою нерухомою котушкою з феромагнітним серПроте описаний спосіб пошуку людей під задечником, яку розташовують в цьому ж першому валами має деякий недолік, пов'язаний з тим, що пошуковому пристрої, причому подовжні осі четвепередбачити в якому положенні в просторі опиртої, п’ятої і шостої котушок першого пошукового ниться друга нерухома котушка з феромагнітним пристрою розташовують перпендикулярно одна сердечником радіомаяка, не є можливим. Найщодо одної при довільній їх орієнтації в просторі, більш вірогідним є положення, при якому вісь цієї причому це ж змінне магнітне поле з частотою f2 котушки з феромагнітним сердечником розташоуловлюють сьомою нерухомою котушкою з феровується в горизонтальній площині. При цьому відмагнітним сердечником, яку розташовують в друхилення оci цієї котушки від горизонту в межах гому пошуковому пристрої, причому це ж змінне ±30° не приводить до істотних помилок визначенмагнітне поле з частотою f2 уловлюють восьмою ня дальності до об'єкта пошуку, враховуючи, до нерухомою котушкою з феромагнітним сердечнитого ж, кубічну залежність рівня сигналу, що прийком, яку розташовують в цьому ж другому пошуко 7 91665 8 вому пристрої, причому це ж змінне магнітне поле ку, при відхиленні подовжньої осі котушки з фероз частотою f2 уловлюють дев'ятою нерухомою комагнітним сердечником радіомаяка об'єкта пошуку тушкою з феромагнітним сердечником, яку розтавід горизонтального положення на кут, більший ніж шовують в цьому ж другому пошуковому пристрої, 30°, проводити рятувальні операції по пошуку люпричому подовжні осі сьомої, восьмої і дев'ятої дей під обвалами гірських порід в шахтах не є докотушок другого пошукового пристрою розташосить ефективним. За способом, що заявляється, вують перпендикулярно один щодо одного при відхилення подовжньої осі котушки з феромагнітдовільній їх орієнтації в просторі, причому це ж ним сердечником радіомаяка об’єкта пошуку від змінне магнітне поле з частотою f2 уловлюють дегоризонтального положення на довільний кут аж сятою нерухомою котушкою з феромагнітним сердо 90°, не приводить до появи помилок у визнадечником, яку розташовують в третьому пошукоченні дальності. вому пристрої, причому це ж змінне магнітне поле У пропонованому способі пошуку людей під з частотою f2 уловлюють одинадцятою нерухомою завалами гірських порід кожну людину з числа котушкою з феромагнітним сердечником, яку розперсоналу шахти забезпечують радіомаяком. В ташовують в цьому ж третьому пошуковому приразі аварії пошук постраждалих здійснює спеціастрої, причому це ж змінне магнітне поле з частольна група рятувальників, яку забезпечують пошутою f2 уловлюють дванадцятою нерухомою ковим устаткуванням, що складається з чотирьох котушкою з феромагнітним сердечником, яку розчастин. Пошукове устаткування складається з ташовують в цьому ж третьому пошуковому припристрою активації радіомаяків і трьох пошукових строї, причому подовжні осі десятої, одинадцятої і пристроїв. Пристрій активації призначений для дванадцятої котушок третього пошукового привипромінювання змінного магнітного поля з частострою розташовують перпендикулярно одна щодо тою f1. Складається пристрій активації з генератоодної при довільній їх орієнтації в просторі, причора безперервних низькочастотних коливань з часму самі пошукові пристрої розташовують один щототою f1 необхідної потужності і нерухомої котушки до одного на деякій відомій відстані, причому поз феромагнітним сердечником. Розташовують шукові пристрої розташовують не на одній лінії, пристрій активації в безпосередній близькості від при цьому в кожному з трьох пошукових пристроїв місця вжиття рятувальних заходів. Потужність випроводять вузькосмугове підсилення низькочастопромінювання змінного магнітного поля має бути тних сигналів, що приймаються нерухомими котудостатньою для того, щоб це змінне магнітне поле шками, при цьому в кожному пошуковому пристрої можна було б прийняти радіомаяками, що знаховсі три прийняті і посилені сигнали змінного струму дяться в зоні вживання рятувальних заходів. У зводять у квадрат, потім усі три зведені в квадрат кожному з радіомаяків це змінне магнітне поле сигнали складають докупи і з отриманої суми витяприймають, підсилюють і оцінюють його рівень. гують квадратний корінь, внаслідок чого отримуПри перевищенні цього рівня деякого порогового ють сигнал постійного струму, рівень якого відпозначення в радіомаяку включають генератор безвідає максимальному рівню низькочастотного перервних низькочастотних коливань з частотою сигналу, що приймається від радіомаяка об'єкта f2, тобто здійснюють активацію радіомаяка. При пошуку, незалежно від положення в просторі трецьому безперервні низькочастотні сигнали, які тьої котушки з феромагнітним сердечником радіовиробляють першим і другим низькочастотними маяка об'єкта пошуку, при цьому в кожному з трьох генераторами, роблять різними за частотою, чим пошукових пристроїв здійснюють вимірювання забезпечують розв'язку низькочастотних підсилюрівня цього сигналу, після чого в кожному з трьох вальних трактів радіомаяка і пошукового припошукових пристроїв ці заміряні рівні сигналів по строю. калібрувальних номограмах переводять у відстані Ці коливання подають на клеми нерухомої кодо об'єкта пошуку, при цьому отримують три відстушки з феромагнітним сердечником, яку розтатані до об'єкта пошуку від кожного їх трьох пошушовують в радіомаяку, і випромінюють тим самим кових пристроїв, після чого вирішують звичайну змінне магнітне поле з частотою f2. Це змінне магтригонометричну задачу і від кожного з пошукових нітне поле з частотою f2 уловлюють дев'ятьма непристроїв отримують однозначно азимут об'єкта рухомими котушками з феромагнітними сердечнипошуку, при цьому використовують один з отримаками трьох пошукових пристроїв, в кожному своєю них азимутів і відстань до об'єкта пошуку для здійтрійкою котушок, подовжні осі яких взаємно перпеснення рятувальних заходів від того пошукового ндикулярні. Прийняті нерухомими котушками попристрою, від якого вживати рятувальні заходи шукових пристроїв сигнали підсилюють у вузькій найефективніше. смузі частот, випрямляють і зводять отримані сигПорівняння винаходу з вже відомими спосонали постійного струму в квадрат. Після цього бами і прототипом показує, що спосіб, що заявлязведені в квадрат сигнали по три в кожному пошується, виявляє нові технічні властивості, що поляковому пристрої складають між собою. При цьому гають в можливості з високою точністю в кожному з пошукових пристроїв підсилюють, однозначного і швидкого визначення азимута і зводять в квадрат і складають докупи сигнали, дальності об'єкта пошуку, що перебуває в завалі прийняті від трьох нерухомих котушок, подовжні гірських порід в межах робочих відстаней, які реаосі яких взаємно перпендикулярні. Після цього з льно в шахтах складають 50-100 м. отриманої суми витягують квадратний корінь, і Ці властивості винаходу є новими, оскільки в отримані сигнали подають на вимірювачі рівня способі-прототипі, через властивий йому недолік, кожного з пошукових пристроїв. При цьому азимут що полягає у великій помилці визначення дальнооб'єкта пошуку не вимірюють, оскільки в ближній сті об'єкта пошуку, а потім і азимута об'єкта пошузоні випромінюючої котушки з феромагнітним сер 9 91665 10 дечником цього зробити неможливо, оскільки абдечником 9 з'єднані з входом вузькосмугового підсолютно неможливо передбачити, в якому полосилювача низькочастотних сигналів 19, при цьому женні опиниться випромінююча котушка радіомаявиводи нерухомої котушки з феромагнітним серка. При цьому саме положення випромінюючої дечником 10 з'єднані з входом вузькосмугового котушки з феромагнітним сердечником радіомаяка підсилювача низькочастотних сигналів 20, при не має значення. Її подовжня вісь може відхилятицьому виводи нерухомої котушки з феромагнітним ся від горизонтальної площини на довільний кут. сердечником 11 з'єднані з входом вузькосмугового При цьому саме положення в просторі приймальпідсилювача низькочастотних сигналів 21, при них котушок пошукового пристрою, подовжні осі цьому виводи нерухомої котушки з феромагнітним яких взаємно перпендикулярні, не має значення. сердечником 12 з'єднані з входом вузькосмугового Оскільки рівень прийнятого сигналу однозначно підсилювача низькочастотних сигналів 22, при пов'язаний з відстанню до джерела випромінюцьому виводи нерухомої котушки з феромагнітним вання відомою залежністю, яку заздалегідь знімасердечником 13 з'єднані з входом вузькосмугового ють і запам'ятовують, то по зміряних рівнях сигнапідсилювача низькочастотних сигналів 23, при лів в кожному з пошукових пристроїв визначають цьому виводи нерухомої котушки з феромагнітним три відстані до радіомаяка від кожного з трьох посердечником 14 з'єднані з входом вузькосмугового шукових пристроїв відповідно. Оскільки взаємне підсилювача низькочастотних сигналів 24, при розташування всіх трьох пошукових пристроїв віцьому вихід вузькосмугового підсилювача низькодоме, відомі відстані між ними і їхні азимути один частотних сигналів 16 з'єднаний з входом випрямщодо одного, то по отриманих трьох відстанях від ляча 26, при цьому вихід вузькосмугового підсипошукових пристроїв до об'єкта пошуку вирішують лювача низькочастотних сигналів 17 з'єднаний з звичайну тригонометричну задачу і отримують три входом випрямляча 27, при цьому вихід вузькосазимути об’єкта пошуку від кожного з трьох пошумугового підсилювача низькочастотних сигналів 18 кових пристроїв відповідно. Для вжиття рятувальз'єднаний з входом випрямляча 28, при цьому виних заходів вибирають той азимут і ту відстань до хід вузькосмугового підсилювача низькочастотних об'єкта пошуку від того пошукового пристрою, від сигналів 19 з'єднаний з входом випрямляча 29, якого вживати ці рятувальні заходи найефективніпри цьому вихід вузькосмугового підсилювача нише. зькочастотних сигналів 20 з'єднаний з входом виВказаний спосіб пошуку постраждалих під запрямляча 30, при цьому вихід вузькосмугового валами з урахуванням довільної орієнтації антени підсилювача низькочастотних сигналів 21 з'єднарадіомаяка можна реалізувати за допомогою приний з входом випрямляча 31, при цьому вихід вустрою, приведеного на Фіг. зькосмугового підсилювача низькочастотних сигПристрій пошуку постраждалих під завалами з налів 22 з'єднаний з входом випрямляча 32, при урахуванням довільної орієнтації антени радіомацьому вихід вузькосмугового підсилювача низькояка складається з пристрою активації, радіомаяка і частотних сигналів 23 з'єднаний з входом випрямпристроїв пошуку і містить генератори низькочасляча 33, при цьому вихідвузькосмугового підситотних коливань 1 і 2, нерухомі котушки з феромалювача низькочастотних сигналів 24 з'єднаний з гнітними сердечниками 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, входом випрямляча 34, при цьому вихід випрям13 і 14, вузькосмугові підсилювачі низькочастотних ляча 26 з'єднаний з входом схеми зведення в квасигналів 15, 16, 17, 18, 19, 20, 21, 22, 23 і 24, видрат 36, при цьому вихід випрямляча 27 з'єднаний прямлячі 25, 26, 27, 28, 29, 30, 31, 32, 33 і 34, поз входом схеми зведення в квадрат 37, при цьому роговий пристрій 35, схеми зведення сигналів в вихід випрямляча 28 з'єднаний з входом схеми квадрат 36, 37, 38, 39, 40, 41, 42, 43 і 44 суматори зведення в квадрат 38, при цьому вихід випрямлясигналів 45, 46 і 47, схеми витягання квадратного ча 29 з'єднаний з входом схеми зведення в квадкореня 48, 49 і 50, вимірювачі рівня і 51, 52 і 53. рат 39, при цьому вихід випрямляча 30 з'єднаний з Вихід генератора низькочастотних коливань 1 входом схеми зведення в квадрат 40, при цьому з'єднаний з виводами нерухомої котушки з феровихід випрямляча 31 з'єднаний з входом схеми магнітним сердечником 3, виводи нерухомої котузведення в квадрат 41, при цьому вихід випрямляшки з феромагнітним сердечником 4 з'єднані з ча 32 з'єднаний з входом схеми зведення в квадвходом вузькосмугового підсилювача низькочасторат 42, при цьому вихід випрямляча 33 з'єднаний з тних сигналів 15, вихід якого з'єднаний з входом входом схеми зведення в квадрат 43, при цьому випрямляча 25, вихід якого з'єднаний з входом вихід випрямляча 34 з'єднаний з входом схеми пороювого пристрою 35, вихід якого з’єднаний зі зведення в квадрат 44, при цьому вихід схеми входом керування низькочастотною генератора 2, зведення в квадрат 36 з'єднаний з першим входом вихід якого з’єднаний із виводами нерухомої котусуматора сигналів 45, а вихід схеми зведення в шки з феромагнітним сердечником 5, при цьому квадрат 37 з'єднаний з другим входом суматора виводи нерухомої котушки з феромагнітним серсигналів 45, а вихід схеми зведення в квадрат 38 дечником 6 з'єднані з входом вузькосмугового підз'єднаний з третім входом суматора сигналів 45, силювача низькочастотних сигналів 16, при цьому при цьому вихід схеми зведення в квадрат 39 з'єдвиводи нерухомої котушки з феромагнітним сернаний з першим входом суматора сигналів 46, а дечником 7 з'єднані з входом вузькосмугового підвихід схеми зведення в квадрат 40 з'єднаний з силювача низькочастотних сигналів 17, при цьому другим входом суматора сигналів 46, а вихід схевиводи нерухомої котушки з феромагнітним серми зведення в квадрат 41 з'єднаний з третім входечником 8 з'єднані з входом вузькосмугового піддом суматора сигналів 46, при цьому вихід схеми силювача низькочастотних сигналів 18, при цьому зведення в квадрат 42 з'єднаний з першим входом виводи нерухомої котушки з феромагнітним серсуматора сигналів 47, а вихід схеми зведення в 11 91665 12 квадрат 43 з'єднаний з другим входом суматора 0 - початкова фаза низькочастотних колисигналів 47, а вихід схеми зведення в квадрат 44 вань; з'єднаний з третім входом суматора сигналів 47, i - кут між проекцією на горизонтальну плопри цьому вихід суматора сигналів 45 з'єднаний з щину подовжньої осі передаючої котушки з феровходом схеми витягання квадратного кореня 48, магнітним сердечником 5 радіомаяка і проекцією при цьому вихід суматора сигналів 46 з'єднаний з на горизонтальну площину подовжньої осі i-тої входом схеми витягання квадратного кореня 49, приймальної котушки з феромагнітним сердечнипри цьому вихід суматора сигналів 47 з'єднаний з ком 6, 7, 8, 9, 10, 11, 12, 13 або 14 одного з трьох входом схеми витягання квадратного, кореня 50, пошукових пристроїв; при цьому вихід схеми витягання квадратного коi - різниця кута відхилення від горизонтальної реня 48 з’єднаний з входом вимірювача рівня 51, площини подовжньої осі передаючої котушки з при цьому вихід схеми витягання квадратного коферомагнітним сердечником 5 радіомаяка і кута реня 49 з’єднаний з входом вимірювача рівня 52, відхилення від горизонтальної площини подовжпри цьому вихід схеми витягання квадратного коньої осі i-тої приймальної котушки з феромагнітреня 50 з'єднаний з входом вимірювача рівня 53. ним сердечником 6, 7, 8, 9, 10, 11, 12, 13 або 14 Працює пристрій, що реалізовує спосіб пошуку одного з трьох пошукових пристроїв. постраждалих під завалами з урахуванням довільЦей сигнал має малий рівень і присутній на тлі ної орієнтації антени радіомаяка таким чином. індустріальних завад, що мають як магнітну, так і Генератор низькочастотних коливань 1 форрадіочастотну природи. Ці завади в шахтах хоч і мує низькочастотні коливання з частотою f1 необмають знижений рівень, але присутнів будь-якому хідної потужності, які збуджують за допомогою разі. нерухомої котушки з феромагнітним сердечником З цієї причини в кожному з пошукових пристро3 змінне низькочастотне магнітне поле з частотою їв проводять вузькосмугове підсилення прийнятого f1. Це змінне низькочастотне магнітне поле уловсигналу і відокремлення його від індустріальних люють нерухомою котушкою з феромагнітним сезавад за допомогою вузькосмугових низькочастотрдечником 4. яка входить до складу радіомаяка. них підсилювачів 16, 17, 18, 19, 20, 21, 22, 23 і 24, Сигнал з виводів цієї нерухомої котушки з феромащо входять до складу трьох пошукових пристроїв. гнітним сердечником 4 подають на вхід вузькосмуДалі проводять випрямлення підсилених сиггового підсилювача низькочастотних сигналів 15, налів за допомогою випрямлячів 26, 27, 28, 29, 30, який також входить до складу радіомаяка, де при31, 32, 33 і 34, що входять до складу трьох пошуйнятий сигнал підсилюють у вузькій смузі частот, кових пристроїв, і отримують на виході і-того вивідокремлюючи його від індустріальних завад, і прямляча сигнал постійного струму, відповідний подають на випрямляч 25, що входить до складу напрузі сигналу змінного струму, що подається на радіомаяка. Випрямлений сигнал подають на вхід його вхід, що відповідає виразу порогового пристрою 35, що входить до складу радіомаяка. При перевищенні прийнятого, посиленого і випрямленого сигналу деякого порогового U0i 0,707 G cos i cos i , рівня пороговий пристрій спрацьовує і включає L3 i генератор безперервних низькочастотних коливань 2, що входить до складу радіомаяка. Цей де G - коефіцієнт підсилення вузькосмугових генератор безперервних низькочастотних колипідсилювачів. вань збуджує за допомогою нерухомої котушки з Якщо розглядати один j-тий пошуковий приферомагнітним сердечником 5, що входить до стрій як одне ціле, до складу якого входять три складу радіомаяка, змінне низькочастотне магнітнерухомі котушки з феромагнітними сердечниками не поле з частотою f2 заданої інтенсивності. Це А, В і С подовжні осі яких взаємно перпендикулярзмінне низькочастотне магнітне поле з частотою f2 ні, і при цьому розташувати, наприклад, котушки А уловлюють нерухомими котушками з феромагніті В в горизонтальній площині, а подовжню вісь коними сердечниками 6, 7, 8, 9, 10, 11, 12, 13 і 14, що тушки С розташувати відповідно перпендикулярно входять до складу трьох пошукових пристроїв. горизонтальній площині, то для пари котушок А і В Сигнал, наведений на виводах і-тої приймальної і відповідної пари вузькосмугових підсилювачів і нерухомої котушки з феромагнітним сердечником випрямлячів можна записати значення випрямлеоднозначно пов'язаний з відстанню між приймаюних сигналів як чою і передаючою котушками наступною залежністю: Ui t L3 i sin 2 f 2 t 0 cos i cos i , де Li - відстань між котушками, м; K - коефіцієнт пропорційності, що має розмірність В·м3, залежний від амплітуди напруги збудження передаючої котушки, частоти збудження, числа витків обох котушок, їх діаметрa. довжини і магнітної проникності феромагнітних сердечників; U0 j 0,707 U0 j 0,707 L3 j L3 j G cos j cos , G cos j cos . Тут кут j відлічується для однієї з котушок jтого пошукового пристрою. Кут - це кут відхилення від горизонтальної площини подовжньої осі 13 91665 14 передаючої котушки з феромагнітним сердечниКоефіцієнти підсилення для всіх вузькосмугоком 5 радіомаяка. вих підсилювачів однакові Прийняті, підсилені і При цьому для котушки С і відповідного вузьвипрямлені сигнали подають на входи схем звекосмугового підсилювача і випрямляча можна задення в квадрат 36, 37, 38, 39, 40, 41, 42, 43 і 44 і писати значення випрямленого сигналу як далі по три в кожному з пошукових пристроїв сигнали подають на суматори 45, 46 і 47. Сигнали з виходів суматорів подають на входи схем витягання квадратного кореня 48, 49 і 50. U0 jC 0,707 G sin , На виході схеми витягання квадратного кореня L3 j j-того пошукового пристрою отримуємо сигнал U0 j U2 0 jA U2 0 jB U2 0 jC 0,707 L3 j G Як видно з приведеної формули, сигнал на виході схеми витягання квадратного кореня кожного з пошукових пристроїв набуває максимально можливого значення, залежного виключно від відстані між j-тим пошуковим пристроєм і радіомаяком Lj і не залежить від взаємної орієнтації в просторі подовжніх осей котушки радіомаяка і котушок пошукового пристрою. Причому сигнал приймає максимальне значення при будь-якому куті відхилення від горизонтальної площині подовжньої осі передаючої котушки з феромагнітним сердечником 5 радіомаяка, аж до 90° і при будь-якому азимуті цієї котушки. При цьому, за способом прототипу максимальний рівень сигналу, що приймається, забезпечувався лише при горизонтальному, найбільш вірогідному, розташуванні котушки радіомаяка з довільним азимутом. За способом, що заявляється, отримують максимально можливий рівень сигналу, що приймається, при будьякому положенні в просторі, як котушок пошукового пристрою, так і котушки радіомаяка. Очевидно, що немає необхідності розташовувати подовжні осі двох з котушок пошукового пристрою виключно в горизонтальній площині, а подовжню вісь третьої котушки перпендикулярно горизонтальній площині. Головне, щоб подовжні осі всіх трьох котушок кожного з пошукових пристроїв були взаємно перпендикулярні, при цьому їх орієнтація в просторі не має значення. Далі сигнали з виходів схеми витягання квадратного кореня подають на входи вимірників рівня 51, 52 і 53, що входять до складу трьох пошукових пристроїв. По виміряних рівнях сигналів, що приймаються, і за відповідними номограмами визначають відстані від кожної трійки нерухомих котушок пошукових пристроїв або від кожного з пошукових пристроїв до радіомаяка або об'єкта пошуку. Маючи, таким чином, три певні відстані від кожного з трьох пошукових пристроїв до об’єкта пошуку відповідно, відстані між пошуковими пристроями, які відомі заздалегідь, азимути кожного з пошукових пристроїв, один відносно одного, які cos 2 cos 2 j sin2 j sin2 0,707 L3 j G. також відомі заздалегідь, вирішують просту тригонометричну задачу і отримують, таким чином, три азимути об'єкта пошуку від кожного з трьох пошукових пристроїв відповідно. Для вживання рятувальних заходів вибирають той азимут об’єкта пошуку і, відповідно ту відстань до об'єкта пошуку, від того з пошукових пристроїв, від якого вживати рятувальні заходи найефективніше. Народногосподарський ефект від використання передбачуваного винаходу пов'язаний з появою можливості швидко і точно визначити координати людини, що перебуває під завалом гірської породи. При цьому під час проведення рятувальних робіт помилок у визначенні дальності об'єкта пошуку не виникає. Це справедливо при будь-якому положенні котушки радіомаяка об'єкта пошуку, тобто з'являється можливість точно визначити координати об’єкта пошуку при будь-якому положенні радіомаяка і, відповідно, при будь-якому положенні тіла постраждалого. Єдина процедура, окрім обчислювальних процедур, яку необхідно виконати один раз - це розмістити пошукові пристрої довільним чином і зафіксувати відстані між ними і їх азимути один відносно одного. Далі проводять лише вимірювання і обчислення. Цей процес легко автоматизують. При цьому з'являється можливість оперативно вжити рятувальні заходи і забезпечити, тим самим, збереження життя людей у кращому разі, у найгіршому випадку є можливість відшукати тіла людей, вже загиблих внаслідок аварії. При вживанні рятувальних заходів у більшості випадків місце аварії відоме. У цих випадках можна обійтися лише двома пошуковими пристроями. При визначенні азимутів об'єкта пошуку від двох пошукових пристроїв описаним способом виникає принципова невизначеність у визначенні азимута. При цьому необхідно вибрати азимут від пошукового пристрою на об'єкт пошуку один з двох. Один з азимутів указуватиме на місце завалу, іншій указувати в протилежному напрямку. Вибрати потрібний азимут в цьому випадку можна організаційно. 15 Комп’ютерна верстка О. Гапоненко 91665 Підписне 16 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTechnique for searching for miners under crump accounting for arbitrary antenna orientation
Автори англійськоюShyrokov Ihor Borysovych
Назва патенту російськоюСпособ поиска пострадавших под завалами с учетом произвольной ориентации антенны радиомаяка
Автори російськоюШироков Игорь Борисович
МПК / Мітки
МПК: E21F 11/00, A62B 33/00, H04B 5/00
Мітки: радіомаяка, антени, урахуванням, спосіб, пошуку, завалами, орієнтації, довільно, постраждалих
Код посилання
<a href="https://ua.patents.su/8-91665-sposib-poshuku-postrazhdalikh-pid-zavalami-z-urakhuvannyam-dovilno-oriehntaci-anteni-radiomayaka.html" target="_blank" rel="follow" title="База патентів України">Спосіб пошуку постраждалих під завалами з урахуванням довільної орієнтації антени радіомаяка</a>
Спосіб пошуку постраждалих під завалами
Номер патенту: 90071
Опубліковано: 25.03.2010
Автор: Широков Ігор Борисович
МПК: H04B 5/00, A62B 99/00, E21F 11/00
Мітки: пошуку, завалами, спосіб, постраждалих
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Спосіб пошуку постраждалих під завалами
Номер патенту: 87642
Опубліковано: 27.07.2009
Автор: Широков Ігор Борисович
МПК: H04B 5/00, E21F 11/00, A62B 99/00
Мітки: пошуку, постраждалих, завалами, спосіб
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Ітераційний спосіб пошуку постраждалих під завалами
Номер патенту: 90072
Опубліковано: 25.03.2010
Автори: Широков Ігор Борисович, Дурманов Максим Анатолійович
МПК: E21F 11/00, H04B 5/00, A62B 99/00
Мітки: завалами, постраждалих, пошуку, ітераційний, спосіб
Формула / Реферат:
Ітераційний спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в...
Спосіб пошуку постраждалих під завалами
Номер патенту: 90832
Опубліковано: 25.05.2010
Автор: Широков Ігор Борисович
МПК: H04B 5/00, A62B 99/00, E21F 11/00
Мітки: пошуку, спосіб, завалами, постраждалих
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Спосіб пошуку постраждалих під завалами
Номер патенту: 86558
Опубліковано: 27.04.2009
Автори: Широков Ігор Борисович, Яуфман Анатолій Іванович
МПК: A62B 99/00, H04B 5/00, E21F 11/00
Мітки: пошуку, постраждалих, завалами, спосіб
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Попередній патент: Тензометричний пристрій для виміру сил тиску
Наступний патент: Спосіб одержання соди та мінеральних добрив
Випадковий патент: Компресорна станція