Спосіб пошуку постраждалих під завалами

Формула / Реферат
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкта пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, при цьому змінне магнітне поле з частотою f2 уловлюють четвертою нерухомою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють п'ятою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж першому пошуковому пристрої, причому подовжні осі четвертої і п'ятої котушок розташовують перпендикулярно одну щодо одної в горизонтальній площині, причому це ж змінне магнітне поле з частотою f2 уловлюють шостою нерухомою котушкою з феромагнітним сердечником, яку розташовують в другому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють сьомою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж другому пошуковому пристрої, причому подовжні осі шостої і сьомої котушок розташовують перпендикулярно одну щодо одної в горизонтальній площині, причому це ж змінне магнітне поле з частотою f2 уловлюють восьмою нерухомою котушкою з феромагнітним сердечником, яку розташовують в третьому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють дев'ятою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж третьому пошуковому пристрої, причому подовжні осі восьмої і дев'ятої котушок розташовують перпендикулярно одну щодо одної в горизонтальній площині, причому самі пошукові пристрої розташовують довільно один щодо одного на відомій відстані, причому кожну пару котушок пошукових пристроїв, осі яких взаємно перпендикулярні, орієнтують на площині довільно, але при цьому вимірюють азимут осі однієї з нерухомих котушок з феромагнітним сердечником, умовно званої котушки репера, кожного з пошукових пристроїв щодо відомого напрямку, наприклад на Північ магнітного поля Землі, при цьому в кожному з трьох пошукових пристроїв проводять вузькосмугове підсилення низькочастотних сигналів, що приймаються нерухомими котушками з феромагнітними сердечниками, при цьому в кожному з трьох пошукових пристроїв проводять випрямлення прийнятих нерухомими котушками і посилених низькочастотних сигналів, при цьому в кожному з пошукових пристроїв обчислюють відношення рівнів прийнятих його двома нерухомими котушками з феромагнітними сердечниками підсилених і випрямлених низькочастотних сигналів, причому, якщо рівень сигналу від котушки репера менший, ніж рівень сигналу від котушки, ортогональної реперу, то обчислюють частку від ділення прийнятого, підсиленого і випрямленого сигналу від котушки репера до прийнятого, підсиленого і випрямленого сигналу від котушки, ортогональної реперу, після чого в кожному з пошукових пристроїв за функцією арккотангенса визначають кут між віссю котушки репера і напрямком, при якому рівень сигналу, що приймається, має максимальну величину, причому, якщо рівень сигналу від котушки репера більший, ніж рівень сигналу від котушки, ортогональної реперу, то обчислюють частка від ділення прийнятого, підсиленого і випрямленого сигналу від котушки, ортогональної реперу, до прийнятого, підсиленого і випрямленого сигналу від котушки репера, після чого в кожному з пошукових пристроїв за функцією арктангенса визначають кут між віссю котушки репера і напрямком, при якому рівень сигналу, що приймається, має максимальну величину, після чого в кожному з пошукових пристроїв складають отримані кути з кутом відхилення осі котушки репера від відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому отримують три напрямки щодо цього відомого напрямку, в яких рівень сигналу, що приймається, має максимальну величину, кожен з яких однозначно пов'язаний з кутом розташування подовжньої осі котушки з феромагнітним сердечником радіомаяка об'єкта пошуку щодо цього ж відомого напрямку, після чого вирішують тригонометричну задачу для трьох трикутників, в якій відомі по одній із сторін всіх трьох трикутників і відносні, але взаємозв'язані один з одним кути при їх вершинах, і від кожного з пошукових пристроїв отримують однозначно дійсні азимути і відстані об'єкта пошуку, при цьому використовують один з отриманих азимутів і одну з отриманих відстаней об'єкта пошуку для здійснення рятувальних заходів від того пошукового пристрою, від якого проводити рятувальні заходи найефективніше.
Текст
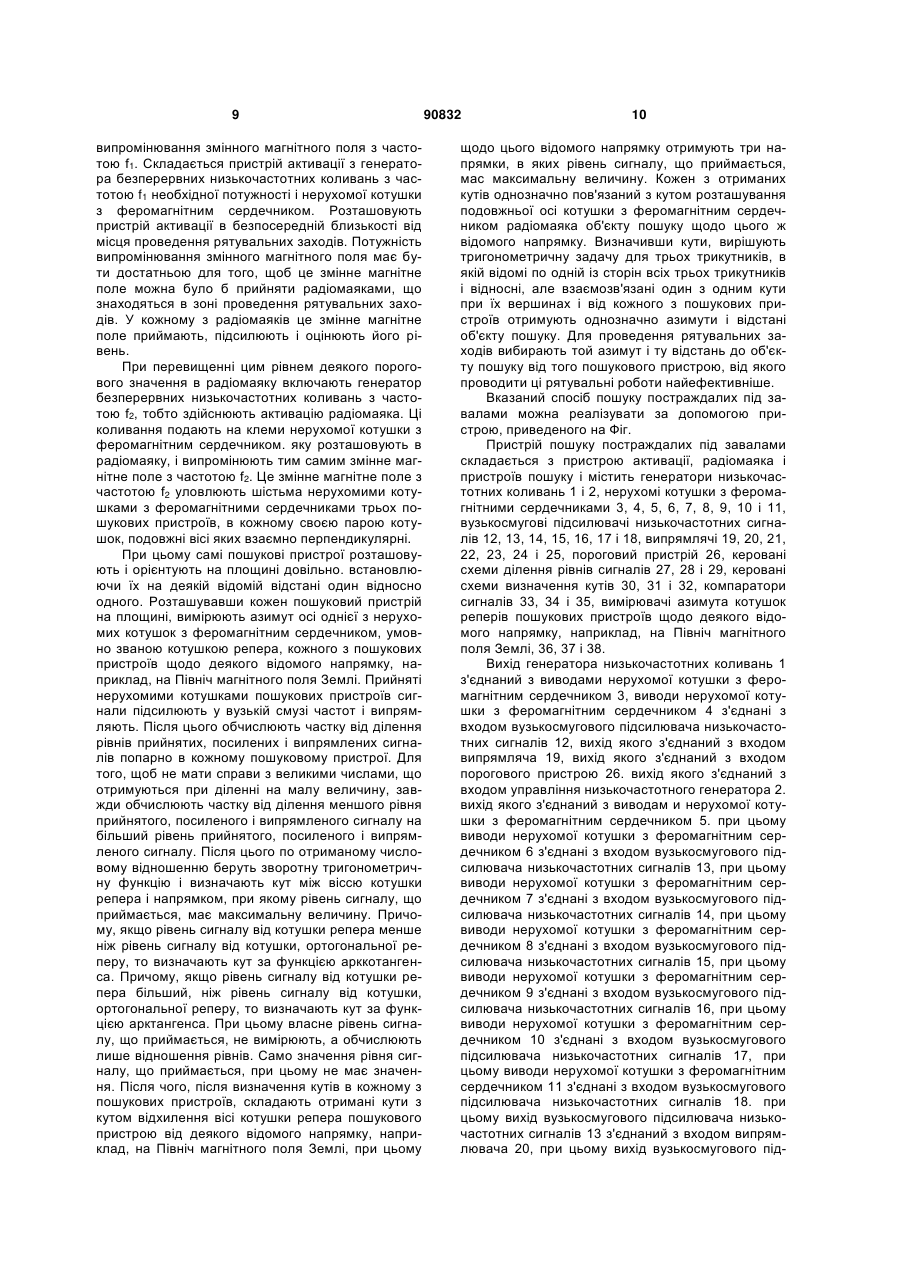
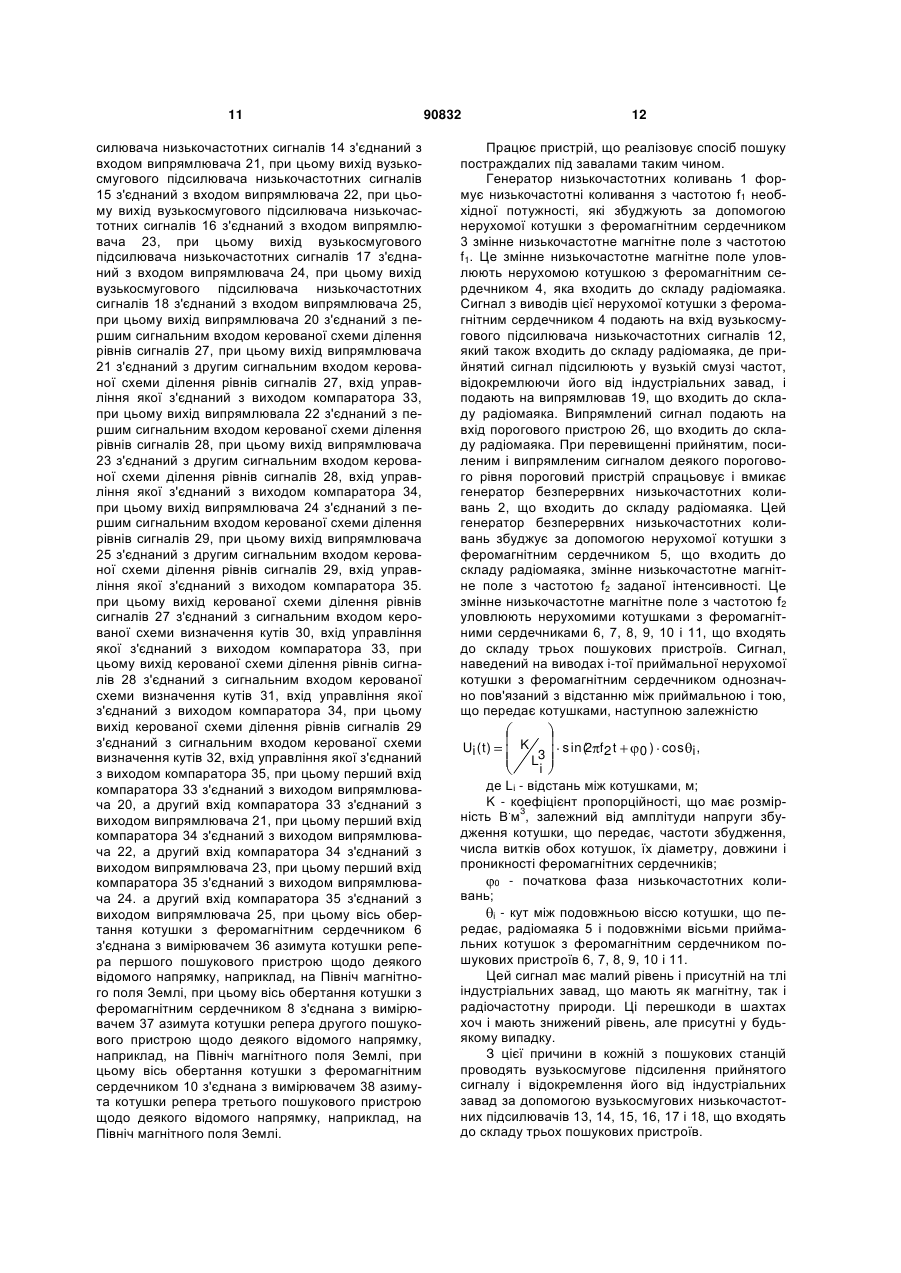
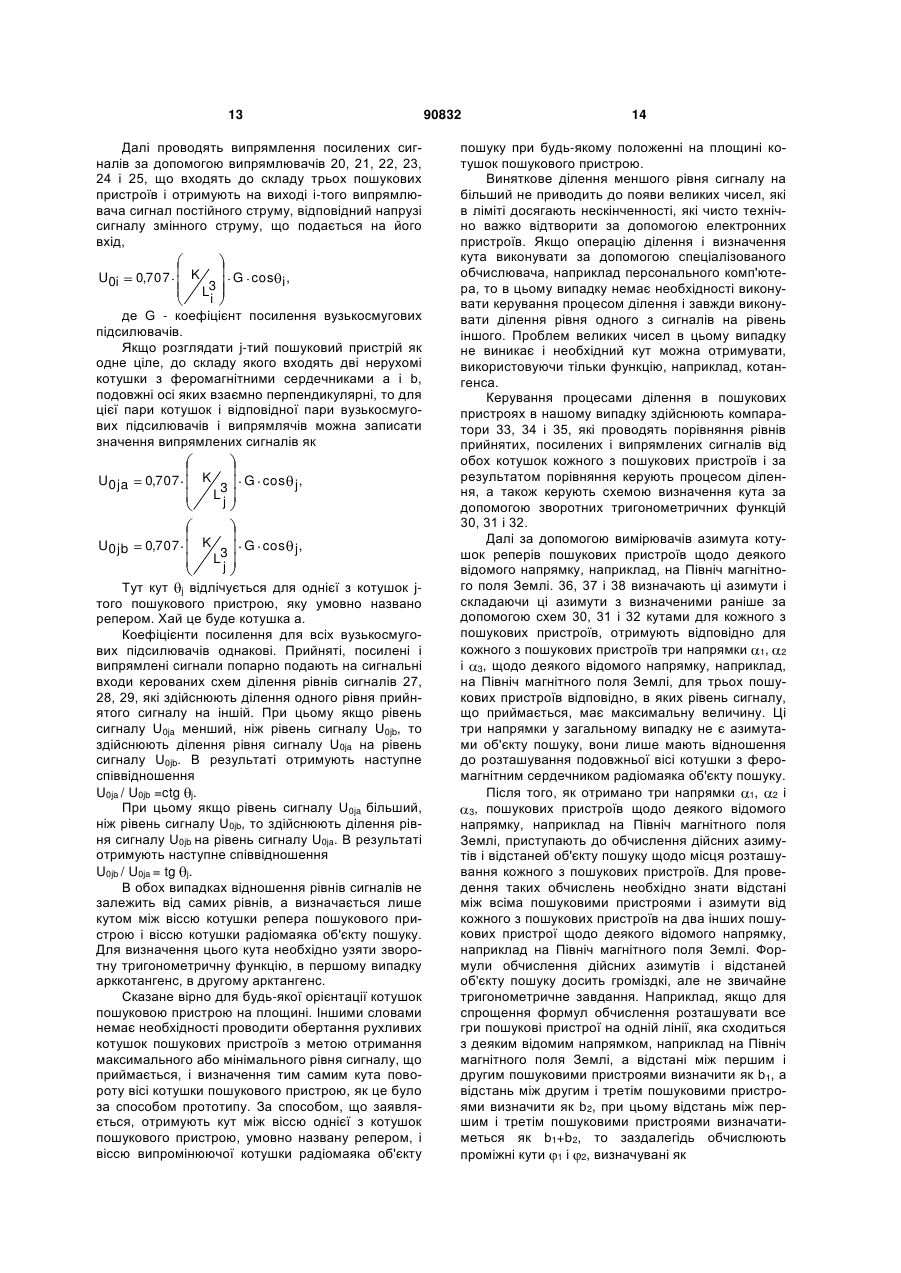
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкта пошуку, при цьому змінне магнітне поле з частотою f1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкта пошуку, після чого сигнал, що знімається з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот, випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкта пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, при цьому 2 (19) 1 3 90832 4 шукових пристроїв обчислюють відношення рівнів прийнятих його двома нерухомими котушками з феромагнітними сердечниками підсилених і випрямлених низькочастотних сигналів, причому, якщо рівень сигналу від котушки репера менший, ніж рівень сигналу від котушки, ортогональної реперу, то обчислюють частку від ділення прийнятого, підсиленого і випрямленого сигналу від котушки репера до прийнятого, підсиленого і випрямленого сигналу від котушки, ортогональної реперу, після чого в кожному з пошукових пристроїв за функцією арккотангенса визначають кут між віссю котушки репера і напрямком, при якому рівень сигналу, що приймається, має максимальну величину, причому, якщо рівень сигналу від котушки репера більший, ніж рівень сигналу від котушки, ортогональної реперу, то обчислюють частка від ділення прийнятого, підсиленого і випрямленого сигналу від котушки, ортогональної реперу, до прийнятого, підсиленого і випрямленого сигналу від котушки репера, після чого в кожному з пошукових пристроїв за функцією арктангенса визначають кут між віссю котушки репера і напрямком, при якому рівень сигналу, що приймається, має максимальну величину, після чого в кожному з пошукових пристроїв складають отримані кути з кутом відхилення осі котушки репера від відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому отримують три напрямки щодо цього відомого напрямку, в яких рівень сигналу, що приймається, має максимальну величину, кожен з яких однозначно пов'язаний з кутом розташування подовжньої осі котушки з феромагнітним сердечником радіомаяка об'єкта пошуку щодо цього ж відомого напрямку, після чого вирішують тригонометричну задачу для трьох трикутників, в якій відомі по одній із сторін всіх трьох трикутників і відносні, але взаємозв'язані один з одним кути при їх вершинах, і від кожного з пошукових пристроїв отримують однозначно дійсні азимути і відстані об'єкта пошуку, при цьому використовують один з отриманих азимутів і одну з отриманих відстаней об'єкта пошуку для здійснення рятувальних заходів від того пошукового пристрою, від якого проводити рятувальні заходи найефективніше. Винахід належить до області забезпечення безпеки робіт в гірничій промисловості і може використовуватися для визначення місця розташування персоналу під завалами в шахтах. Відомі способи автоматизованого визначення місця розташування персоналу, наприклад «Уніфікована телекомунікаційна система УТАС» яка містить кабель, сервер системи позиціювання, програмне забезпечення системи (У книзі «Способи і засоби створення безпечних і здорових умов праці у вугільних шахтах», збірка наукової праці МАКНД1 Макіївка. 2005p. - с.323-333) або «Система автоматизованого табельного обліку і визначення місця розташування персоналу і техніки на шахтах і копальнях в комплексі «Талнах», яка містить: контроллери, зчитувачі системи позиціювання, випромінюючий кабель, сервер системи позиціювання, програмне забезпечення системи (У журналі «Устаткування для підприємств ПЕК» №8. М.. 2006р.. опубл. 10.08.2006). Проте позиціювання об'єктів (персоналу і транспортних засобів) по цих системах здійснюється з точністю, обумовленою дискретністю установки зчитувачів системи позиціювання і реально складає 100-200м. Крім того, система працює лише в межах прямої видимості об'єкту позиціювання і зчитувача практично непридатна в разі виникнення обвалу гірської породи, що є непереборною перешкодою для радіосигналів з прийнятими в описаних системах довжинами хвиль. Найбільш близьким до передбачуваного винаходу є «Спосіб пошуку постраждалих під завалами», описаний в патенті України №87642 опубл. 27.07.2009 бюл. №14. За цим способом визначення місця розташування персоналу шахти під завалами, кожного працівника шахти забезпечують радіомаяком, а пошукову групу забезпечують пристроєм активації радіомаяків і пристроями пошуку. При цьому, до складу пристрою активації вводять: перший генератор першої низької частоти, першу нерухому котушку з феромагнітним сердечником. До складу радіомаяка вводять нерухомі другу і третю котушки з феромагнітними сердечниками, вузько смуговий підсилювач першої низької частоти, детектор несучої, пороговий пристрій, другий генератор другої низької частоти. До складу трьох пошукових пристроїв, поодинці в кожен, вводять: рухливі котушки з феромагнітними сердечниками, вузькосмугові підсилювачі сигналів другої низької частоти, випрямлячі, індикатори рівня сигналів, що приймаються, вимірники азимута положення рухливих котушок з феромагнітними сердечниками. За описаним способом за допомогою першого генератора низької частоти формують низькочастотний гармонійний сигнал з першою частотою, який подають на першу нерухому котушку з феромагнітним сердечником. Через цю першу котушку з феромагнітним сердечником випромінюють в простір змінне магнітне поле першої частоти. При цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкту пошуку. Другою нерухомою котушкою з феромагнітним сердечником радіомаяка це змінне магнітне поле першої частоти приймають і потім отриманий низькочастотний гармонійний сигнал з першою частотою підсилюють за допомогою вузькосмугового підсилювача першої низької частоти радіомаяка, після чого посилений низькочастотний сигнал подають на детектор несучої. де цей сигнал змінного струму випрямляють. Далі випрямлений сигнал подають на пороговий пристрій, де порівнюють напругу випрямленого сигналу з деяким пороговим рівнем і 5 при перевищенні рівнем випрямленого сигналу цього порогового рівня включають другий генератор низької частоти, на виході якого формують низькочастотний гармонійний сигнал з другою частотою, який подають на третю нерухому котушку з феромагнітним сердечником. Через цю третю нерухому котушку з феромагнітним сердечником радіомаяка випромінюють в простір змінне магнітне поле другої низької частоти. Причому четвертою рухливою котушкою з феромагнітним сердечником першого пошукового пристрою це змінне магнітне поле другої низької частоти приймають і потім отриманий низькочастотний гармонійний сигнал з другою частотою підсилюють за допомогою першого вузькосмугового підсилювача другої низької частоти першого пошукового пристрою і випрямляють за допомогою першого випрямляча першого пошукового пристрою, після чого випрямлений сигнал постійного струму подають на перший індикатор рівня сигналу першого пошукового пристрою, що приймається. Причому п'ятою рухливою котушкою з феромагнітним сердечником другого пошукового пристрою це змінне магнітне поле другої низької частоти приймають і потім отриманий низькочастотний гармонійний сигнал з другою частотою підсилюють за допомогою другого вузькосмугового підсилювача другої низької частоти другого пошукового пристрою і випрямляють за допомогою другого випрямляча другого пошукового пристрою, після чого випрямлений сигнал постійного струму подають на другий індикатор рівня сигналу другого пошукового пристрою, що приймається. Причому шостою рухливою котушкою з феромагнітним сердечником третього пошукового пристрою це змінне магнітне поле другої низької частоти приймають і потім отриманий низькочастотний гармонійний сигнал з другою частотою підсилюють за допомогою третього вузькосмугового підсилювача другої низької частоти третього пошукового пристрою і випрямляють за допомогою третього випрямляча третього пошукового пристрою, після чого випрямлений сигнал постійного струму подають на третій індикатор рівня сигналу третього пошукового пристрою, що приймається. При цьому гармонійні низькочастотні сигнали, які виробляють першим і другим низькочастотними генераторами, роблять різними по частоті. Цим забезпечують розв'язку низькочастотних підсилювальних трактів радіомаяка і пошукового пристрою. При цьому самі пошукові пристрої розташовують довільно, але при цьому вимірюють азимути пошукових пристроїв один щодо одного і деякого відомого напрямку, наприклад, на Північ магнітного поля Землі. При цьому в кожному з трьох пошукових пристроїв обертають рухливі котушки з феромагнітними сердечниками в горизонтальній площині довкола вісі. перпендикулярної подовжній вісі котушки з феромагнітним сердечником, і добиваються при цьому появи на індикаторах рівня кожного з трьох пошукових пристроїв або мінімальних, або максимальних показів, причому при високих рівнях сигналу, що приймається, добиваються появи на індикаторі рівня мінімальних показів, а при низьких рівнях сигналу, що приймається, добиваються появи на індикаторі 90832 6 рівня максимальних показів. При цьому обертання котушки з феромагнітним сердечником пошукового пристрою до появи мінімальних показів індикатора рівня сигналу. що приймається пошуковим пристроєм, є переважним. При цьому в кожному з трьох пошукових пристроїв здійснюють вимірювання азимута повороту подовжньої вісі рухливої котушки з феромагнітним сердечником щодо деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому отримують три кути повороту подовжніх осей котушок з феромагнітним сердечником пошукових пристроїв щодо цього відомого напрямку, кожен з яких однозначно пов'язаний з кутом розташування подовжньої вісі котушки з феромагнітним сердечником радіомаяка об'єкту пошуку щодо цього ж відомого напрямку, причому для тих пошукових пристроїв, для яких обертання рухливої котушки з феромагнітним сердечником проводилося до появи максимуму сигналу, що приймався, до виміряного кута положення подовжньої вісі котушки з феромагнітним сердечником пошукового пристрою додають 90°, після чого вирішують тригонометричну задачу для трьох трикутників, в якій відомі по одній із сторін усіх трьох трикутників і відносні, але взаємозв'язані один з одним кути при їх вершинах і від кожного з пошукових пристроїв отримують однозначно дійсні азимути і відстані об'єкту пошуку, при цьому використовують один з отриманих азимутів і одну з отриманих відстаней об'єкту пошуку для здійснення рятувальних заходів від того пошукового пристрою, від якого проводити рятувальні заходи найефективніше. Проте описаний спосіб пошуку людей під завалами має істотний недолік, пов'язаний з необхідністю проводити обертання рухливих котушок пошукових пристроїв з метою досягнення мінімальних або максимальних показів індикатора рівня. Це спричиняє за собою ускладнення процедури пошуку, збільшення часу пошуку, тобто зниження ефективності пошукових робіт. У той же час украй необхідно ефективно вирішувати завдання визначення азимута об'єкту пошуку і відстані до нього з високою точністю і досить швидко, тобто проводити пошук людей, що перебувають під завалами гірських порід. Велика смертність серед персоналу вугільних шахт обумовлена саме тим, що при існуючому стані справ швидко відшукати постраждалих людей не є можливим. В основу винаходу поставлено завдання визначення азимута і відстані до об'єкту пошуку, людини, що знаходиться в товщі гірських порід. Вона вирішується завдяки тому, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній близькості від передбачуваного об'єкту пошуку, при цьому змінне магнітне поле з частотою f1 уловлюють другою нерухомою котушкою з феромагнітним сердечником, яку встановлюють в радіомаяку об'єкту пошуку, після чого сигнал. що знімається 7 з клем другої котушки з феромагнітним сердечником, підсилюють у вузькій смузі частот. випрямляють і оцінюють його рівень, причому при перевищенні випрямленого сигналу постійного струму деякого порогового рівня починають генерувати безперервні низькочастотні коливання з частотою f2, які подають на клеми третьої нерухомої котушки з феромагнітним сердечником, яку також розташовують в радіомаяку об'єкту пошуку, і випромінюють тим самим змінне магнітне поле з частотою f2, при цьому змінне магнітне поле з частотою f2 уловлюють четвертою нерухомою котушкою з феромагнітним сердечником, яку розташовують в першому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють п'ятою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж першому пошуковому пристрої, причому подовжні вісі четвертої і п'ятої котушок розташовують перпендикулярно одну щодо одної в горизонтальній площині, причому це ж змінне магнітне поле з частотою f2 уловлюють шостою нерухомою котушкою з феромагнітним сердечником, яку розташовують в другому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють сьомою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж другому пошуковому пристрої, причому подовжні вісі шостої і сьомої котушок розташовують перпендикулярно одну щодо одної в горизонтальній площині, причому це ж змінне магнітне поле з частотою f2 уловлюють восьмою нерухомою котушкою з феромагнітним сердечником, яку розташовують в третьому пошуковому пристрої, причому це ж змінне магнітне поле з частотою f2 уловлюють дев'ятою нерухомою котушкою з феромагнітним сердечником, яку розташовують в цьому ж третьому пошуковому пристрої, причому подовжні вісі восьмої і дев'ятої котушок розташовують перпендикулярно одну щодо одного в горизонтальній площині, причому самі пошукові пристрої розташовують довільно один щодо одного на деякій відомій відстані, причому кожну пару котушок пошукових пристроїв, осі яких взаємно перпендикулярні, орієнтують на площині довільно, але при цьому вимірюють азимут осі однієї з нерухомих котушок з феромагнітним сердечником, умовно званою котушкою репера, кожного з пошукових пристроїв щодо деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому в кожному з трьох пошукових пристроїв проводять вузькосмугове підсилення низькочастотних сигналів, що приймаються нерухомими котушками з феромагнітними сердечниками, при цьому в кожному з трьох пошукових пристроїв проводять випрямлення прийнятих нерухомими котушками і посилених низькочастотних сигналів, при цьому в кожному з пошукових пристроїв обчислюють відношення рівнів прийнятих його двома нерухомими котушками з феромагнітними сердечниками, підсилених і випрямлених низькочастотних сигналів, причому, якщо рівень сигналу від котушки репера менший, ніж рівень сигналу від котушки, ортогональної реперу, то обчислюють частка від ділення прийнятого, підсиленого і випрямленого сигналу від котушки репера 90832 8 до прийнятого, підсиленого і випрямленого сигналу від котушки, ортогональної реперу, після чого в кожному з пошукових пристроїв за функцією арккотангенса визначають кут між віссю котушки репера і напрямком, при якому рівень сигналу. що приймається, має максимальну величину, причому якщо рівень сигналу від котушки репера більший, ніж рівень сигналу від котушки, ортогональної реперу, то обчислюють частка від ділення прийнятого, підсиленого і випрямленого сигналу від котушки, ортогональної реперу до прийнятого, підсиленого і випрямленого сигналу від котушки репера, після чого в кожному з пошукових пристроїв за функцією арктангенса визначають кут між віссю котушки репера і напрямком, при якому рівень сигналу, що приймається, має максимальну величину, після чого в кожному з пошукових пристроїв складають отримані кути з кутом відхилення вісі котушки репера від деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому отримують три напрямки щодо цього відомого напрямку, в яких рівень сигналу, що приймається, має максимальну величину, кожен з яких однозначно пов'язаний з кутом розташування подовжньої осі котушки з феромагнітним сердечником радіомаяка об'єкту пошуку щодо цього ж відомого напрямку, після чого вирішують тригонометричну задачу для трьох трикутників, в якій відомі по одній із сторін всіх трьох трикутників і відносні, але взаємозв'язані один з одним кути при їх вершинах і від кожного з пошукових пристроїв отримують однозначно дійсні азимути і відстані об'єкту пошуку, при цьому використовують один з отриманих азимутів і одну з отриманих відстаней об'єкту пошуку для здійснення рятувальних заходів від того пошукового пристрою, від якого проводити рятувальні заходи найефективніше. Порівняння передбачуваного винаходу з вже відомими способами і прототипом показує, що спосіб, який заявляється, виявляє нові технічні властивості, що полягають в можливості з високою точністю однозначного і швидкого визначення азимута і відстані об'єкту пошуку, що перебуває в завалі гірських порід в межах робочих відстаней, які реально в шахтах складають 50-100м. Ці властивості передбачуваного винаходу є новими, оскільки в способі-прототипі, через властивий йому недолік, що полягає в тривалій процедурі визначення відстані і азимута об'єкту пошуку, пов'язаній з обертанням рухливих котушок з феромагнітними сердечниками, пошуком напрямку прийому мінімального або максимального рівня сигналу, а потім і вимірюванням кута цього напрямку, проводити рятувальні операції з пошуку людей під обвалами гірських порід в шахтах є не досить ефективним. У пропонованому способі пошуку людей під завалами гірських порід кожну людину з числа персоналу шахти забезпечують радіомаяком. В разі аварії пошук постраждалих здійснює спеціальна група рятувальників, яку забезпечують пошуковим обладнанням, що складається з чотирьох часток. Пошукове обладнання складається з пристрою активації радіомаяків і трьох пошукових пристроїв. Пристрій активації призначений для 9 випромінювання змінного магнітного поля з частотою f1. Складається пристрій активації з генератора безперервних низькочастотних коливань з частотою f1 необхідної потужності і нерухомої котушки з феромагнітним сердечником. Розташовують пристрій активації в безпосередній близькості від місця проведення рятувальних заходів. Потужність випромінювання змінного магнітного поля має бути достатньою для того, щоб це змінне магнітне поле можна було б прийняти радіомаяками, що знаходяться в зоні проведення рятувальних заходів. У кожному з радіомаяків це змінне магнітне поле приймають, підсилюють і оцінюють його рівень. При перевищенні цим рівнем деякого порогового значення в радіомаяку включають генератор безперервних низькочастотних коливань з частотою f2, тобто здійснюють активацію радіомаяка. Ці коливання подають на клеми нерухомої котушки з феромагнітним сердечником. яку розташовують в радіомаяку, і випромінюють тим самим змінне магнітне поле з частотою f2. Це змінне магнітне поле з частотою f2 уловлюють шістьма нерухомими котушками з феромагнітними сердечниками трьох пошукових пристроїв, в кожному своєю парою котушок, подовжні вісі яких взаємно перпендикулярні. При цьому самі пошукові пристрої розташовують і орієнтують на площині довільно. встановлюючи їх на деякій відомій відстані один відносно одного. Розташувавши кожен пошуковий пристрій на площині, вимірюють азимут осі однієї з нерухомих котушок з феромагнітним сердечником, умовно званою котушкою репера, кожного з пошукових пристроїв щодо деякого відомого напрямку, наприклад, на Північ магнітного поля Землі. Прийняті нерухомими котушками пошукових пристроїв сигнали підсилюють у вузькій смузі частот і випрямляють. Після цього обчислюють частку від ділення рівнів прийнятих, посилених і випрямлених сигналів попарно в кожному пошуковому пристрої. Для того, щоб не мати справи з великими числами, що отримуються при діленні на малу величину, завжди обчислюють частку від ділення меншого рівня прийнятого, посиленого і випрямленого сигналу на більший рівень прийнятого, посиленого і випрямленого сигналу. Після цього по отриманому числовому відношенню беруть зворотну тригонометричну функцію і визначають кут між віссю котушки репера і напрямком, при якому рівень сигналу, що приймається, має максимальну величину. Причому, якщо рівень сигналу від котушки репера менше ніж рівень сигналу від котушки, ортогональної реперу, то визначають кут за функцією арккотангенса. Причому, якщо рівень сигналу від котушки репера більший, ніж рівень сигналу від котушки, ортогональної реперу, то визначають кут за функцією арктангенса. При цьому власне рівень сигналу, що приймається, не вимірюють, а обчислюють лише відношення рівнів. Само значення рівня сигналу, що приймається, при цьому не має значення. Після чого, після визначення кутів в кожному з пошукових пристроїв, складають отримані кути з кутом відхилення вісі котушки репера пошукового пристрою від деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому 90832 10 щодо цього відомого напрямку отримують три напрямки, в яких рівень сигналу, що приймається, мас максимальну величину. Кожен з отриманих кутів однозначно пов'язаний з кутом розташування подовжньої осі котушки з феромагнітним сердечником радіомаяка об'єкту пошуку щодо цього ж відомого напрямку. Визначивши кути, вирішують тригонометричну задачу для трьох трикутників, в якій відомі по одній із сторін всіх трьох трикутників і відносні, але взаємозв'язані один з одним кути при їх вершинах і від кожного з пошукових пристроїв отримують однозначно азимути і відстані об'єкту пошуку. Для проведення рятувальних заходів вибирають той азимут і ту відстань до об'єкту пошуку від того пошукового пристрою, від якого проводити ці рятувальні роботи найефективніше. Вказаний спосіб пошуку постраждалих під завалами можна реалізувати за допомогою пристрою, приведеного на Фіг. Пристрій пошуку постраждалих під завалами складається з пристрою активації, радіомаяка і пристроїв пошуку і містить генератори низькочастотних коливань 1 і 2, нерухомі котушки з феромагнітними сердечниками 3, 4, 5, 6, 7, 8, 9, 10 і 11, вузькосмугові підсилювачі низькочастотних сигналів 12, 13, 14, 15, 16, 17 і 18, випрямлячі 19, 20, 21, 22, 23, 24 і 25, пороговий пристрій 26, керовані схеми ділення рівнів сигналів 27, 28 і 29, керовані схеми визначення кутів 30, 31 і 32, компаратори сигналів 33, 34 і 35, вимірювачі азимута котушок реперів пошукових пристроїв щодо деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, 36, 37 і 38. Вихід генератора низькочастотних коливань 1 з'єднаний з виводами нерухомої котушки з феромагнітним сердечником 3, виводи нерухомої котушки з феромагнітним сердечником 4 з'єднані з входом вузькосмугового підсилювача низькочастотних сигналів 12, вихід якого з'єднаний з входом випрямляча 19, вихід якого з'єднаний з входом порогового пристрою 26. вихід якого з'єднаний з входом управління низькочастотного генератора 2. вихід якого з'єднаний з виводам и нерухомої котушки з феромагнітним сердечником 5. при цьому виводи нерухомої котушки з феромагнітним сердечником 6 з'єднані з входом вузькосмугового підсилювача низькочастотних сигналів 13, при цьому виводи нерухомої котушки з феромагнітним сердечником 7 з'єднані з входом вузькосмугового підсилювача низькочастотних сигналів 14, при цьому виводи нерухомої котушки з феромагнітним сердечником 8 з'єднані з входом вузькосмугового підсилювача низькочастотних сигналів 15, при цьому виводи нерухомої котушки з феромагнітним сердечником 9 з'єднані з входом вузькосмугового підсилювача низькочастотних сигналів 16, при цьому виводи нерухомої котушки з феромагнітним сердечником 10 з'єднані з входом вузькосмугового підсилювача низькочастотних сигналів 17, при цьому виводи нерухомої котушки з феромагнітним сердечником 11 з'єднані з входом вузькосмугового підсилювача низькочастотних сигналів 18. при цьому вихід вузькосмугового підсилювача низькочастотних сигналів 13 з'єднаний з входом випрямлювача 20, при цьому вихід вузькосмугового під 11 силювача низькочастотних сигналів 14 з'єднаний з входом випрямлювача 21, при цьому вихід вузькосмугового підсилювача низькочастотних сигналів 15 з'єднаний з входом випрямлювача 22, при цьому вихід вузькосмугового підсилювача низькочастотних сигналів 16 з'єднаний з входом випрямлювача 23, при цьому вихід вузькосмугового підсилювача низькочастотних сигналів 17 з'єднаний з входом випрямлювача 24, при цьому вихід вузькосмугового підсилювача низькочастотних сигналів 18 з'єднаний з входом випрямлювача 25, при цьому вихід випрямлювача 20 з'єднаний з першим сигнальним входом керованої схеми ділення рівнів сигналів 27, при цьому вихід випрямлювача 21 з'єднаний з другим сигнальним входом керованої схеми ділення рівнів сигналів 27, вхід управління якої з'єднаний з виходом компаратора 33, при цьому вихід випрямлювала 22 з'єднаний з першим сигнальним входом керованої схеми ділення рівнів сигналів 28, при цьому вихід випрямлювача 23 з'єднаний з другим сигнальним входом керованої схеми ділення рівнів сигналів 28, вхід управління якої з'єднаний з виходом компаратора 34, при цьому вихід випрямлювача 24 з'єднаний з першим сигнальним входом керованої схеми ділення рівнів сигналів 29, при цьому вихід випрямлювача 25 з'єднаний з другим сигнальним входом керованої схеми ділення рівнів сигналів 29, вхід управління якої з'єднаний з виходом компаратора 35. при цьому вихід керованої схеми ділення рівнів сигналів 27 з'єднаний з сигнальним входом керованої схеми визначення кутів 30, вхід управління якої з'єднаний з виходом компаратора 33, при цьому вихід керованої схеми ділення рівнів сигналів 28 з'єднаний з сигнальним входом керованої схеми визначення кутів 31, вхід управління якої з'єднаний з виходом компаратора 34, при цьому вихід керованої схеми ділення рівнів сигналів 29 з'єднаний з сигнальним входом керованої схеми визначення кутів 32, вхід управління якої з'єднаний з виходом компаратора 35, при цьому перший вхід компаратора 33 з'єднаний з виходом випрямлювача 20, а другий вхід компаратора 33 з'єднаний з виходом випрямлювача 21, при цьому перший вхід компаратора 34 з'єднаний з виходом випрямлювача 22, а другий вхід компаратора 34 з'єднаний з виходом випрямлювача 23, при цьому перший вхід компаратора 35 з'єднаний з виходом випрямлювача 24. а другий вхід компаратора 35 з'єднаний з виходом випрямлювача 25, при цьому вісь обертання котушки з феромагнітним сердечником 6 з'єднана з вимірювачем 36 азимута котушки репера першого пошукового пристрою щодо деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому вісь обертання котушки з феромагнітним сердечником 8 з'єднана з вимірювачем 37 азимута котушки репера другого пошукового пристрою щодо деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, при цьому вісь обертання котушки з феромагнітним сердечником 10 з'єднана з вимірювачем 38 азимута котушки репера третього пошукового пристрою щодо деякого відомого напрямку, наприклад, на Північ магнітного поля Землі. 90832 12 Працює пристрій, що реалізовує спосіб пошуку постраждалих під завалами таким чином. Генератор низькочастотних коливань 1 формує низькочастотні коливання з частотою f1 необхідної потужності, які збуджують за допомогою нерухомої котушки з феромагнітним сердечником 3 змінне низькочастотне магнітне поле з частотою f1. Це змінне низькочастотне магнітне поле уловлюють нерухомою котушкою з феромагнітним сердечником 4, яка входить до складу радіомаяка. Сигнал з виводів цієї нерухомої котушки з феромагнітним сердечником 4 подають на вхід вузькосмугового підсилювача низькочастотних сигналів 12, який також входить до складу радіомаяка, де прийнятий сигнал підсилюють у вузькій смузі частот, відокремлюючи його від індустріальних завад, і подають на випрямлював 19, що входить до складу радіомаяка. Випрямлений сигнал подають на вхід порогового пристрою 26, що входить до складу радіомаяка. При перевищенні прийнятим, посиленим і випрямленим сигналом деякого порогового рівня пороговий пристрій спрацьовує і вмикає генератор безперервних низькочастотних коливань 2, що входить до складу радіомаяка. Цей генератор безперервних низькочастотних коливань збуджує за допомогою нерухомої котушки з феромагнітним сердечником 5, що входить до складу радіомаяка, змінне низькочастотне магнітне поле з частотою f2 заданої інтенсивності. Це змінне низькочастотне магнітне поле з частотою f2 уловлюють нерухомими котушками з феромагнітними сердечниками 6, 7, 8, 9, 10 і 11, що входять до складу трьох пошукових пристроїв. Сигнал, наведений на виводах і-тої приймальної нерухомої котушки з феромагнітним сердечником однозначно пов'язаний з відстанню між приймальною і тою, що передає котушками, наступною залежністю Ui ( t ) K s in(2 f 2 t 0 ) cos i , L3 i де Lі - відстань між котушками, м; K - коефіцієнт пропорційності, що має розмірність В.м3, залежний від амплітуди напруги збудження котушки, що передає, частоти збудження, числа витків обох котушок, їх діаметру, довжини і проникності феромагнітних сердечників; 0 - початкова фаза низькочастотних коливань; i - кут між подовжньою віссю котушки, що передає, радіомаяка 5 і подовжніми вісьми приймальних котушок з феромагнітним сердечником пошукових пристроїв 6, 7, 8, 9, 10 і 11. Цей сигнал має малий рівень і присутній на тлі індустріальних завад, що мають як магнітну, так і радіочастотну природи. Ці перешкоди в шахтах хоч і мають знижений рівень, але присутні у будьякому випадку. З цієї причини в кожній з пошукових станцій проводять вузькосмугове підсилення прийнятого сигналу і відокремлення його від індустріальних завад за допомогою вузькосмугових низькочастотних підсилювачів 13, 14, 15, 16, 17 і 18, що входять до складу трьох пошукових пристроїв. 13 90832 Далі проводять випрямлення посилених сигналів за допомогою випрямлювачів 20, 21, 22, 23, 24 і 25, що входять до складу трьох пошукових пристроїв і отримують на виході і-того випрямлювача сигнал постійного струму, відповідний напрузі сигналу змінного струму, що подається на його вхід, U0i 0,707 K G cos i , L3 i де G - коефіцієнт посилення вузькосмугових підсилювачів. Якщо розглядати j-тий пошуковий пристрій як одне ціле, до складу якого входять дві нерухомі котушки з феромагнітними сердечниками a і b, подовжні осі яких взаємно перпендикулярні, то для цієї пари котушок і відповідної пари вузькосмугових підсилювачів і випрямлячів можна записати значення випрямлених сигналів як U0 ja 0,707 K U0 jb 0,707 K L3 j L3 j G cos j , G cos j , Тут кут j відлічується для однієї з котушок jтого пошукового пристрою, яку умовно названо репером. Хай це буде котушка a. Коефіцієнти посилення для всіх вузькосмугових підсилювачів однакові. Прийняті, посилені і випрямлені сигнали попарно подають на сигнальні входи керованих схем ділення рівнів сигналів27, 28, 29, які здійснюють ділення одного рівня прийнятого сигналу на іншій. При цьому якщо рівень сигналу U0ja менший, ніж рівень сигналу U0jb, то здійснюють ділення рівня сигналу U0ja на рівень сигналу U0jb. В результаті отримують наступне співвідношення U0ja / U0jb =ctg j. При цьому якщо рівень сигналу U0ja більший, ніж рівень сигналу U0jb, то здійснюють ділення рівня сигналу U0jb на рівень сигналу U0ja. В результаті отримують наступне співвідношення U0jb / U0ja = tg j. В обох випадках відношення рівнів сигналів не залежить від самих рівнів, а визначається лише кутом між віссю котушки репера пошукового пристрою і віссю котушки радіомаяка об'єкту пошуку. Для визначення цього кута необхідно узяти зворотну тригонометричну функцію, в першому випадку арккотангенс, в другому арктангенс. Сказане вірно для будь-якої орієнтації котушок пошуковою пристрою на площині. Іншими словами немає необхідності проводити обертання рухливих котушок пошукових пристроїв з метою отримання максимального або мінімального рівня сигналу, що приймається, і визначення тим самим кута повороту вісі котушки пошукового пристрою, як це було за способом прототипу. За способом, що заявляється, отримують кут між віссю однієї з котушок пошукового пристрою, умовно названу репером, і віссю випромінюючої котушки радіомаяка об'єкту 14 пошуку при будь-якому положенні на площині котушок пошукового пристрою. Виняткове ділення меншого рівня сигналу на більший не приводить до появи великих чисел, які в ліміті досягають нескінченності, які чисто технічно важко відтворити за допомогою електронних пристроїв. Якщо операцію ділення і визначення кута виконувати за допомогою спеціалізованого обчислювача, наприклад персонального комп'ютера, то в цьому випадку немає необхідності виконувати керування процесом ділення і завжди виконувати ділення рівня одного з сигналів на рівень іншого. Проблем великих чисел в цьому випадку не виникає і необхідний кут можна отримувати, використовуючи тільки функцію, наприклад, котангенса. Керування процесами ділення в пошукових пристроях в нашому випадку здійснюють компаратори 33, 34 і 35, які проводять порівняння рівнів прийнятих, посилених і випрямлених сигналів від обох котушок кожного з пошукових пристроїв і за результатом порівняння керують процесом ділення, а також керують схемою визначення кута за допомогою зворотних тригонометричних функцій 30, 31 і 32. Далі за допомогою вимірювачів азимута котушок реперів пошукових пристроїв щодо деякого відомого напрямку, наприклад, на Північ магнітного поля Землі. 36, 37 і 38 визначають ці азимути і складаючи ці азимути з визначеними раніше за допомогою схем 30, 31 і 32 кутами для кожного з пошукових пристроїв, отримують відповідно для кожного з пошукових пристроїв три напрямки 1, 2 і 3, щодо деякого відомого напрямку, наприклад, на Північ магнітного поля Землі, для трьох пошукових пристроїв відповідно, в яких рівень сигналу, що приймається, має максимальну величину. Ці три напрямки у загальному випадку не є азимутами об'єкту пошуку, вони лише мають відношення до розташування подовжньої вісі котушки з феромагнітним сердечником радіомаяка об'єкту пошуку. Після того, як отримано три напрямки 1, 2 і 3, пошукових пристроїв щодо деякого відомого напрямку, наприклад на Північ магнітного поля Землі, приступають до обчислення дійсних азимутів і відстаней об'єкту пошуку щодо місця розташування кожного з пошукових пристроїв. Для проведення таких обчислень необхідно знати відстані між всіма пошуковими пристроями і азимути від кожного з пошукових пристроїв на два інших пошукових пристрої щодо деякого відомого напрямку, наприклад на Північ магнітного поля Землі. Формули обчислення дійсних азимутів і відстаней об'єкту пошуку досить громіздкі, але не звичайне тригонометричне завдання. Наприклад, якщо для спрощення формул обчислення розташувати все гри пошукові пристрої на одній лінії, яка сходиться з деяким відомим напрямком, наприклад на Північ магнітного поля Землі, а відстані між першим і другим пошуковими пристроями визначити як b1, а відстань між другим і третім пошуковими пристроями визначити як b2, при цьому відстань між першим і третім пошуковими пристроями визначатиметься як b1+b2, то заздалегідь обчислюють проміжні кути 1 і 2, визначувані як 15 1 1 2 2, b1 tan 2 x y 90832 2 2 2 Після цього визначають декартові координати об'єкту пошуку щодо першого пошукового пристрою 3. tan 2 (tan 1)2 (b1 b 2 )2 (tan 1)2 (tan 2 )2 (b1 b 2 )2 b2 ) 2 , (b1 b 2 ) (tan 1 tan 2 ) tan 1 tan 2 b1 b 2 , (tan 1)2 (tan 2 )2 (b1 b 2 )2 (b 2 tan 1 b 2 tan 2 )2 R1 x2 R2 (b1 x )2 R3 (b1 b 2 y2 , y2 , x)2 y2 , Де R1 R2 Дійсні азимути 1 2 R2 b2 R2 1 2 , arccos 1 1 2 R1 b1 1 1, 2 2. Таким чином, отримують координати об'єкту пошуку, людину, що перебуває під завалом. Для проведення рятувальних робіт вибирають той азимут об'єкту пошуку і, відповідно, ту відстань до об'єкту пошуку від того з пошукових пристроїв, від якого проводити рятувальні роботи найефективніше. 3 b 2 ) tan 1 (b1 b 2 1 (b 2 tan 1 b 2 tan 2 )2 tan 2 (b1 b 2 Після цього визначають полярні координати об'єкту пошуку від кожного з пошукових пристроїв, тобто визначають відстані і дійсні азимути об'єкту пошуку від кожного з пошукових пристроїв. У прийнятій системі координат дійсний азимут відлічуватиметься від прямої, що з'єднує усі три пошукові пристрої, тобто від напрямку на Північ магнітного поля Землі. Відстані об'єкту пошуку визначають по наступних формулах 2 16 Народногосподарський ефект від використання передбачуваного винаходу пов'язаний з появою можливості швидко і точно визначити координати людини, що перебуває під завалом гірської породи. При цьому з'являється можливість оперативно вжити рятувальних заходів і забезпечити, тим самим, збереження житія людей у кращому разі. у найгіршому випадку є можливість відшукати тіла людей, вже загиблих в внаслідок аварії. При проведенні рятувальних робіт не проводять обертання рухливих котушок. Всі котушки пошукових пристроїв нерухомі, що істотно спрощує процедуру пошуку і відповідно зменшує час пошуку. Коли йдеться про врятуванні життів людей ця обставина є особливо важливою. Єдина процедура, окрім обчислювальних процедур, яку необхідно виконати один раз - це розташувати пошукові пристрої довільним чином і зафіксувати відстані між ними і їх азимути один відносно одного і відносно деякого відомою напрямку, наприклад на Північ магнітного поля Землі. Далі проводять лише обчислення. Цей процес легко автоматизують. Всі обчислювальні процедури визначення відстані й азимута об'єкту пошуку, людину, що перебуває під завалом гірської породи, виконують в реальному масштабі часу за допомогою обчислювального пристрою. Реалізація обчислювального пристрою не принципова, сам пристрій може навіть перебуває на поверхні далеко за межами зони аварії. Дані в обчислювальний пристрій вводять при цьому вручну, використовуючи усну передачу інформації і відомі канали зв'язку. 17 Комп’ютерна верстка Т. Чепелева 90832 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for looking for trapped victims
Автори англійськоюShyrokov Ihor Borysovych
Назва патенту російськоюСпособ поиска пострадавших под завалами
Автори російськоюШироков Игорь Борисович
МПК / Мітки
МПК: E21F 11/00, A62B 99/00, H04B 5/00
Мітки: пошуку, спосіб, постраждалих, завалами
Код посилання
<a href="https://ua.patents.su/9-90832-sposib-poshuku-postrazhdalikh-pid-zavalami.html" target="_blank" rel="follow" title="База патентів України">Спосіб пошуку постраждалих під завалами</a>
Спосіб пошуку постраждалих під завалами
Номер патенту: 90071
Опубліковано: 25.03.2010
Автор: Широков Ігор Борисович
МПК: H04B 5/00, E21F 11/00, A62B 99/00
Мітки: постраждалих, спосіб, пошуку, завалами
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Спосіб пошуку постраждалих під завалами
Номер патенту: 87642
Опубліковано: 27.07.2009
Автор: Широков Ігор Борисович
МПК: E21F 11/00, H04B 5/00, A62B 99/00
Мітки: спосіб, постраждалих, пошуку, завалами
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Ітераційний спосіб пошуку постраждалих під завалами
Номер патенту: 90072
Опубліковано: 25.03.2010
Автори: Дурманов Максим Анатолійович, Широков Ігор Борисович
МПК: H04B 5/00, E21F 11/00, A62B 99/00
Мітки: пошуку, ітераційний, постраждалих, завалами, спосіб
Формула / Реферат:
Ітераційний спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в...
Спосіб пошуку постраждалих під завалами
Номер патенту: 86558
Опубліковано: 27.04.2009
Автори: Яуфман Анатолій Іванович, Широков Ігор Борисович
МПК: A62B 99/00, H04B 5/00, E21F 11/00
Мітки: постраждалих, завалами, спосіб, пошуку
Формула / Реферат:
Спосіб пошуку постраждалих під завалами, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з феромагнітним сердечником розташовують в безпосередній...
Спосіб пошуку постраждалих під завалами і дистанційного контролю їх серцевого ритму
Номер патенту: 89933
Опубліковано: 10.03.2010
Автор: Широков Ігор Борисович
МПК: H04B 5/00, E21F 11/00, A62B 33/00
Мітки: постраждалих, контролю, завалами, спосіб, ритму, пошуку, серцевого, дистанційного
Формула / Реферат:
Спосіб пошуку постраждалих під завалами і дистанційного контролю їх серцевого ритму, що включає випромінювання і прийом безперервних низькочастотних коливань, який відрізняється тим, що спочатку генерують безперервні низькочастотні коливання з частотою f1, причому ці коливання подають на клеми першої нерухомої котушки з феромагнітним сердечником і випромінюють тим самим змінне магнітне поле з частотою f1, при цьому першу котушку з...
Попередній патент: Мікрохвильовий резонатор
Наступний патент: Механізм запирання ливарних машин
Випадковий патент: Спосіб одержання пластифікованої композиції на основі поліхлорвінілу