Інформаційно-вимірювальна система
Номер патенту: 113449
Опубліковано: 25.01.2017
Автори: Манжело Валерій Олександрович, Конельський Володимир Анатолійович, Конельський Віктор Анатолійович




































































Формула / Реферат
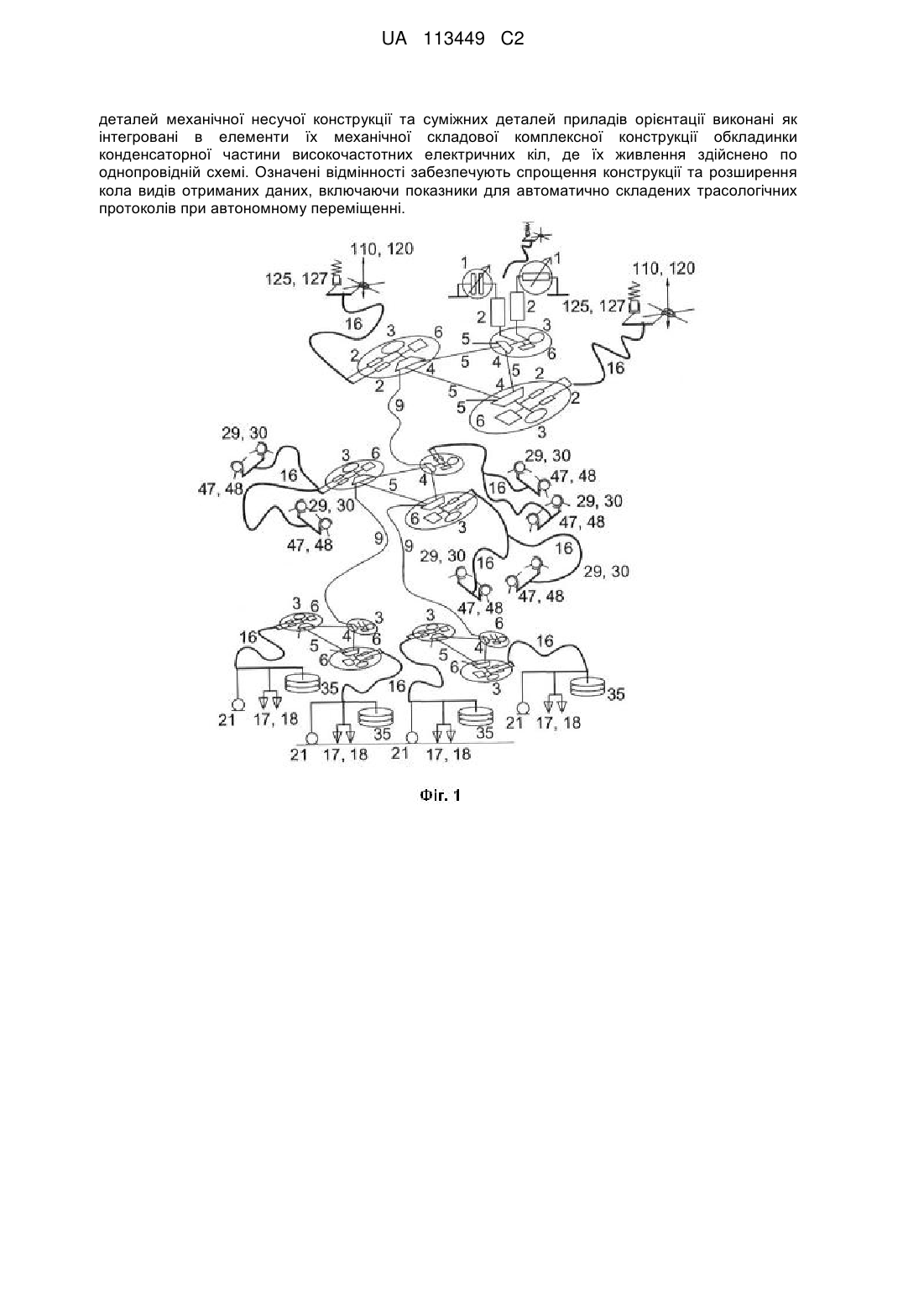
1. Інформаційно-вимірювальна система, що включає давачі з вимірювальними перетворювачами (2) та мікропроцесори (3) з інтерфейсними пристроями (4), і з них сформовано основу мікропроцесорного вузла (6), а також канали міжвузлових зв'язків, із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, в якій мікропроцесорні вузли розподілені на окремі функціональні рівні в межах системи, і мікропроцесорні вузли для кожного з цих рівнів з'єднані каналами (5) міжвузлових зв'язків по три в одному кластері, при цьому вона є складеною з двох окремих подібних підсистем (7, 8), а мікропроцесорні вузли (6) кластерів верхнього рівня кожної з підсистем підключені до трьох додаткових мікропроцесорних вузлів (12), з'єднаних каналами міжвузлових зв'язків (13) так, що вони утворюють спільний для цих підсистем кластер супервізорного рівня, яка відрізняється тим, що її електронні блоки безпосередньо асоційовані як із базовою структурною одиницею для всієї системи з гнучкою функціонально орієнтованою механічною несучою конструкцією, складеною із обертально рухомих важелів та стрижнів рам так, що сенсорні електронні складові давачів кожної із окремих підсистем (7, 8) є розташованими у деталях конструкції та ребрах двох різних з'єднаних механічно стрижнево-шарнірних рам, виконаних переважно із немагнітного діелектричного матеріалу і оснащених кожна трьома периферійними рухомими важільними опорами (38), при цьому окрема множина давачів має сенсори, які приєднані до самих стрижнів (45, 46 та ін.) так, що вони відображають поточні зміни їх просторового стану при зміщуванні будь-яких стрижнів та важелів, інша множина давачів, які належать переважно до мікропроцесорних вузлів (6) кластерів нижнього рівня у обох підсистемах (7, 8), має сенсори (17, 18), що прикріплені рухомо до відгалужень (34) опор (38), і при їх переміщенні в робоче положення забезпечують постійний електричний та акустичний контакт із ділянками твердої поверхні біля п'ят (42) важелів опор (38) кожної із стрижнево-шарнірних рам, а поточний стан локального магнітного поля біля кожної з цих ділянок є визначеним завдяки його взаємодії із закріпленим на опорі магніточутливим сенсором (35) окремого давача, підключеного до мікропроцесорного вузла (6) кластера цього самого рівня відповідної підсистеми.
2. Інформаційно-вимірювальна система за п. 1, яка відрізняється тим, що просторовий стан стрижнів (45, 46) стрижнево-шарнірних рам та важелів опор (38) в робочому стані є зафіксованим двоходовими циліндрично-штоковими телескопічними штангами (106, 107, 109) контрольованої зміни довжини, що у своєму складі в їх робочих порожнинах (93-96) мають речовину, яка знаходиться в рухому стані під тиском, вищим за тиск у навколишньому середовищі.
3. Інформаційно-вимірювальна система за пп. 1 та 2, яка відрізняється тим, що сенсорні частини для давачів складних обертальних і зсувних лінійних зрушень деталей гнучкої функціонально орієнтованої механічної несучої конструкції та суміжних деталей приладів в складі давачів орієнтації і стабілізації виконані як інтегровані в елементи їх механічної складової комплексної конструкції обкладинки (29, 30 та ін.) конденсаторної частини високочастотних електричних кіл, де їх живлення здійснено по однопровідній схемі.
Текст
Реферат: Винахід належить до засобів вимірювання фізичних величин, де мікропроцесори забезпечують в цій системі автоматичну реалізацію наперед заданої програми вимірювань та передавання інформації у вигляді потоку даних (цифрових кодів) на адресу інших приймачів в умовах дії дестабілізуючих факторів екстремальних погодно-кліматичних умов і при обмежених сервісних ресурсах для гарантування потрібного рівня метрологічного забезпечення процесів отримання геофізичної інформації реального часу в межах досліджуваних об'єктів, які можуть бути віддаленими від населених пунктів. Інформаційно-вимірювальна система характеризується тим, що її електронні блоки безпосередньо асоційовані як із базовою структурною одиницею для всієї системи з гнучкою функціонально орієнтованою механічною несучою конструкцією, складеною із обертально рухомих важелів та стрижнів рам. Сенсорні електронні складові давачів є розташованими у деталях конструкції та ребрах двох різних з'єднаних механічно стрижнево-шарнірних рам, оснащених рухомими важільними опорами. Окрема множина давачів має сенсори, які відображають поточні зміни їх просторового стану, а інша множина давачів мікропроцесорних вузлів кластерів нижнього рівня має сенсори, прикріплені до відгалужень опор і забезпечують постійний електричний та акустичний контакт із ділянками твердої поверхні, а стан магнітного поля цих ділянок є визначеним сенсором окремого давача мікропроцесорного вузла кластера. Крім того, просторовий стан стрижнів та важелів опор в робочому стані є зафіксованим двоходовими циліндрично-штоковими телескопічними штангами контрольованої зміни довжини, що в їх робочих порожнинах мають речовину в рухому стані під тиском. Також сенсорні частини для давачів складних обертальних і зсувних лінійних зрушень UA 113449 C2 (12) UA 113449 C2 деталей механічної несучої конструкції та суміжних деталей приладів орієнтації виконані як інтегровані в елементи їх механічної складової комплексної конструкції обкладинки конденсаторної частини високочастотних електричних кіл, де їх живлення здійснено по однопровідній схемі. Означені відмінності забезпечують спрощення конструкції та розширення кола видів отриманих даних, включаючи показники для автоматично складених трасологічних протоколів при автономному переміщенні. UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до засобів вимірювання фізичних величин, а саме до систем, складених із пристроїв, що здатні під час вимірювання сприймати фізичну взаємодію середовища з чутливими органами (сенсорами) вхідних блоків цих пристроїв (давачів), формуючи функціонально визначений електричний сигнал, а також потім останній перетворювати у відповідний математично визначений цифровий код (цифрове вимірювальне перетворення). Мікропроцесорні пристрої та канали зв'язку між ними забезпечують в системі автоматичну реалізацію наперед заданої програми вимірювань та передавання отриманої інформації у вигляді потоку даних (цифрових кодів) на адресу інших приймачів. Інформаційно-вимірювальна система з наданими вище ознаками може використовуватися в промисловості та науково-дослідницькій діяльності при забезпеченні якісної технічної підтримки широкого кола реальних задач автоматичних вимірювань у тому числі і таких, які переважно пов'язані із геодезичними, геофізичними та діагностичними роботами, що їх виконують в польових умовах на території відкритих майданчиків в суттєво пересіченій місцевості. Тут необхідність отримання узгоджених даних вимірів величин відмінного фізичного змісту та від великої кількості різноманітних давачів з мінімальною затримкою у часі може бути викликана обставинами нестримних природних чи техногенних руйнівних процесів, коли фактор трудомісткості вимірювань та часу обробки значної кількості отриманих результатів може бути критичним при організації ефективних рятувальних чи відновлювальних операцій. Ці системи проектують як такі, що забезпечують високий рівень оперативності та достовірності даних, постійну готовність до роботи, належну надійність та ремонтопридатність технічних засобів в умовах обмежених сервісних ресурсів, що загалом дозволяє їх використання у так званих "важких" умовах експлуатації для гарантування потрібного рівня метрологічного забезпечення та інших видів інформаційного обслуговування визначеного кола процесів отримання інформації реального часу в межах досліджуваних об'єктів, які можуть бути віддаленими від населених пунктів та постійних джерел електроживлення, перебувати в екстремальних погоднокліматичних умовах та підпадати під дію одночасно кількох несприятливих факторів, що уповільнюють темп роботи, а також суттєво підвищують рівень ризиків втрати якості даних або їх суттєвої фрагментації у масивах сполучених послідовностей. Важливою особливістю саме запропонованої системи є можливість її автономної роботи в автоматичному режимі із самостійним переміщенням сенсорів давачів у нові позиції для вимірів у визначеному просторі точок спостереження в межах досліджуваної ділянки. Також відмінністю даного технічного рішення є можливість досягнення необхідного у кількісному вимірі числа задіяних у процесах автоматичних вимірів спеціалізованих давачів із сенсорами різного типу для створення реально діючого розширеного технічного комплексу засобів із типових за принциповою конструкцією геофізичних приладів та інших вимірювальних пристроїв при діагностичному дослідженні умов довкілля при збереженні найвищих показників точності та швидкодії в разі їх підключення до відповідних терміналів інформаційно-вимірювальної системи. Сучасні інформаційно-вимірювальні системи, як компоненти більш складних і розгалужених телеметричних систем, обов'язково мають канали зв'язку, що автоматично згідно із діючою програмою роботи розподіляють і направляють сигнали від сенсорів давачів у напрямку до засобів для їх послідовної обробки та оперативного накопичення, а також відображення інформації в спеціально розроблених екранних формах і друкованих протоколах. Сучасні мікропроцесори як пристрої широкого кола застосувань є заздалегідь пристосованими ефективно працювати в подібних засобах автоматизації вимірювань та трансляції необхідних обсягів даних. Більшість відомих інформаційно-вимірювальних систем, що використовують мікропроцесори як ключовий компонент програмованого керування засобами цифрових вимірювальних перетворювань, мають як базове технічне рішення для передавання цифрових кодів використання як спільного каналу зв'язку реверсивної "загальної шини". Таке технічне рішення забезпечує інформаційну досяжність до будь-якого із давачів системи з мінімальними витратами технічних ресурсів, задовільним часовим інтервалом очікування трансляції даних та відносно простою дисципліною організації доступу при обслуговуванні пристроїв, що діють автоматично. Саме тому, починаючи з перших промислових зразків лабораторних вимірювальних комплексів, від перших варіантів каналу цифрового зв'язку між приладами, відомого з 1965 р. як HP-Bus [1], a y модернізованому варіанті [2] навіть із "гарячим" підключенням і відімкненням та видаленням засобів вимірювання, такі прилади у своїй більшості мають не тільки вбудовані досконалі блоки типу "давач-перетворювач", але також спеціалізовані засоби трансляції даних для організації цифрового інтерфейсу в межах, наприклад, окремого діагностичного стенда чи іншого подібного устаткування. В стандартизованих промислових інформаційно-вимірювальних системах у модульному виконанні 1 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 з використанням спеціалізованої сертифікованої об'єднуючої механічної несучої конструкції, наприклад, крейта КАМАК (САМАС) [3], спосіб підключення окремих функціональних пристроїв до внутрішньої "загальної шини" ще й досі залишається практично незмінним. Давачі як обов'язкові складові в такій системі є підключеними безпосередньо або через керований комутатор до досконалих вимірювальних перетворювачів "аналог-код", а вони, в свою чергу, з'єднані з мікропроцесорами, що в такій структурі окрім іншого обладнання мають інтерфейсні пристрої для взаємодії із засобами організації системних каналів зв'язку. Підключення блоків реверсивної "загальної шини" і сама конструктивна реалізація такого виду системного каналу зв'язку навіть у межах базового пристрою із його специфічним механічним збиральним та монтажним засобом, оптимізованим для певного характеру використань, як наприклад "кошик" крейта КАМАК із закріпленими в ньому електричними роз'ємами та направляючими для фіксації замінюваних вимірювальних модулів, суттєво обмежує загальну продуктивність системи при зростанні кількості задіяних пристроїв через виключно послідовний характер звертань до функціональних блоків із обміном інформацією, що чекають на обслуговування через цю шину навіть у режимі з використанням переривань. У сучасних варіантах виробів цього типу пристрої найчастіше є лише доповненими технічними засобами використання інтерфейсів до вже більш вживаних у приладобудуванні каналів для зіркоподібного об'єднання пристроїв, як наприклад, ЕІА RS 485 [4] чи USB 2.0, або у найближчий перспективі - USB 3.0 [5], а також мережевих каналів з дисципліною Ethernet 10/100/1000 [6] у створюваних системах із підтримкою локальних мереж за протоколом TCP/IP, який є базовим для обміну блоками даних в Internet. Завдяки конструктивно-технологічним методам мікромініатюризації із застосуванням "великих інтегральних схем" у засобах створення каналів (інтерфейсних контролерах) та вимірювальних перетворювачів високого класу точності вони вже є зменшеними до таких розмірів, що дозволяють сприймати подібні пристрої як дійсно портативну апаратуру [7, 8], що не передбачає спеціальних місць для постійного розташування та довгострокового використання з одним комплексом досліджуваних об'єктів. Однак показники готовності до роботи та загальної надійності тут у більшості форм і конструкцій (це стосується не тільки «кишенькових» приладів) залишаються недостатніми для сфер їх застосування в промислових комплексах разом із обладнанням для безперервного цілодобового циклу роботи через існуючу принципово високу імовірність "мережевих конфліктів" та зупинок передачі сигналів по внутрішніх каналах зв'язку, що призводить до фрагментації даних, або навіть електричного роз'єднання системи на окремі непрацездатні прилади. Тим більше що вони в значній масі варіантів оснащення є мало придатними для складних польових вимірювальних робіт, коли окрім ступеню захисту приладів і мереж від несприятливих зовнішніх кліматичних умов постають як досить суттєві обмеження допустимої реальної довжини переміщуваних кабельних комунікацій та інформаційних ліній до окремих сегментів мережі, не захищені та небезпечні форми електроживлення від різних джерел частин мережі із гальванічним зв'язком (у тому числі і від резервних), а також загальна значна енергоємність окремих приладів. Досі існують складність у виконанні різних обов'язкових послідовностей операцій для необхідної та частої в цих умовах періодичної ініціалізації, а також діагностики при розгортанні на нових об'єктах або при змінах положень окремих перемішуваних приладів чи хоча б їх сенсорів для охоплення заданих територій засобами дослідження тощо. Лише частково вказані недоліки є компенсованими у переважно напівстаціонарних установках та лише додатково розгорнутих на час епізодичних діагностичних робіт вимірювальних комплексів із відносно інерційними об'єктами [9], де використана можливість надійного інформаційного сполучення різних приладів завдяки, наприклад, утилізації двопровідної симетричної дротової лінії [4] у межах наперед закладених в будівельних конструкціях потрібних кабельних ресурсів. Польові роботи із залученням досконалої сучасної вимірювальної та обчислювальної техніки там, де по нормативам механічних та кліматичних умов вони є граничними для експлуатаційних можливостей таких пристроїв, постають виключно вимушеними діями як з організаційного, так і з технічного поглядів. Таке, як правило, обумовлено необхідністю отримання якісної і оперативної інформації про фізичні особливості та можливі прояви типових аномалій на об'єктах, які з певних природних чи катастрофічних обставин не можуть бути переміщені або доставлені у більш сприятливі для цього місця та приміщення, наприклад, під час екстрених аварійно-відновлювальних робіт із великогабаритними транспортними засобами та будівельними конструкціями. Навпаки, систематичні пошукові виміри часто проводять на площі не пристосованих для цього ділянок відкритих майданчиків, де треба досить швидко та без зайвих значних капітальних витрат виконати детальне вивчення властивостей підповерхневих чи більш глибинних протяжних структур природного чи штучного походження. 2 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 В усіх цих випадках підлягають обов'язковому вирішенню суміжно-дотичні та взаємно перекриваючі одна одну в часі виконання операції із проведенням достатньо точних вимірів при діагностичних роботах, які стосуються максимально якісної прив'язки до точок певної системи місцевих чи глобальних координат (геодезія) будь-яких проявів відмінностей у фізичних властивостях середовища (геофізика), що їх тільки стає можливим в цих умовах зафіксувати як отримані експериментально приладами чи обчислені на підставі кількох різних об'єктивних вимірів явні розбіжності з окремими послідовно взятими величинами, сформованими через покази у різних місцях (локаціях) досліджуваного простору [10, 11]. Для проектних робіт у будівельній галузі отримані таким чином відповідні знання стають оцінюваними економічно через можливі значні перевитрати коштів на зайві ресурси для досягнення встановленого обов'язковими нормативами рівня надійності споруд, а у пошуку та розвідці, наприклад, корисних копалин - через матеріальні компенсації завжди можливої розрахункової чисельної похибки у визначених величинах ймовірностей в прогнозі просторового розташування у глибинних горизонтах очікуваних ресурсів. Завдяки такій економічній та технічній мотивації галузь геодезичного та геофізичного приладобудування є достатньо розвиненою у структурному плані, та її продукція представлена сотнями зразків як традиційних оптико-механічних, так і новітніх точних електронних комп'ютеризованих приладів, що працюють у кінцевих терміналах відповідних спеціалізованих систем. Але останні навіть до цього часу в своїй більшості є унікальними за використаними логічними протоколами інтерфейсів, спеціальними методиками застосування та форматами отриманих даних, суміщена обробка яких потребує ретельної операторської роботи з протоколами досліджень та екранними формами баз даних. Серед засобів для геофізичних досліджень місцевості, що мають бути виконаними за методом "пішою ходою", тобто коли послідовно з однієї позиції на іншу переміщують (як правило вручну) усі знаряддя вздовж заданих ліній на вибраній території, найбільше застосування знайшли магнітометричні та електрострумові прилади, які за умов обробки отриманих від них разом сукупних та одночасних даних у співпадаючих локаціях точок вимірів забезпечують необхідний мінімум інформації про прояви аномалії у тому фізичному середовищі - безпосередньо у ґрунті, у матеріалі заглиблених споруд тощо, яке реально існує під поверхнею досліджуваної ділянки об'єкта на глибинах від 500…800 міліметрів (межа для механічних щупів) до кількох десятків (інколи до двох сотень) метрів безпосередньо у проекціях вниз точок проведення вимірів. Виконання серій із кількох сотень або навіть десятків тисяч послідовних вимірів у межах однієї досліджуваної ділянки, які є безумовно потрібними для створення достатньо деталізованих комп'ютерних моделей [12], ще й досі залишається дуже трудомістким, а тому повільним і мало надійним способом виконання таких робіт через практично повну відсутність досконало механізованих засобів та автоматизованої приладної бази проведення одночасних комплексних вимірювань кількох базових параметрів. Це, в першу чергу, пов'язано із самою конструкцією та практикою використання точних геофізичних вимірювальних приладів, де як правило відсутні саме засоби для автоматизації типових технологічних процедур, особливо саме тих, які стосуються первинної чи початкової для кожної нової позиції підготовки обладнання до вимірів на відкритій місцевості, їх налаштування або зміни раніше встановлених для інших умов діючих налаштувань. Тим більше, що значна частина навіть сучасного приладного парку орієнтована переважно саме на "свердловинний" чи "шурфовий" метод розташування необхідної сенсорної частини геофізичних приладів, яка є найбільш чутливої до ураження під час монтажу. Такі пристрої хоч і забезпечують дійсно потрібну достатньо високу якість, але саме безпечне і досконале розташування сенсорів як правило потребує значної попередньої інженерно-будівельної підготовчої роботи, спрямованої, в першу чергу, на вдосконалення умов для забезпечення їх працездатності в місцях розташування відповідних частин вимірювального обладнання для отримання достовірних геофізичних показів. Для заглиблених у свердловини комплексів вимірювальної техніки тепер постають актуальними проблеми якісного доставлення все зростаючої кількості отриманої безпосередньо від сенсорів давачів необхідної первинної інформації через обмеження ефективної смуги частот зв'язкового середовища при передаванні фізичних сигналів у вживаній економічній однопровідній схемі [13] підключення поверхневої (наземної) частини обладнання з використанням найбільш поширених для цього в галузі трос-кабелів з ізольованою гальванічною лінією, коли обов'язковою для замкненого струмового електричного кола другою гальванічною лінією виступає сам металевий несучий вантажний трос, що його через інші металеві частини механізмів з'єднано із підключеним до усіх "заземлених" корпусів приладів їх нульових терміналів. 3 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 За методом "покрокового" переміщення засобів вимірювання безпосередньо на поверхні використовують сенсори, які не передбачають будь-яке суттєве заглиблення у ґрунті, а тому їх можливо встановлювати чи вмикати для вимірів набагато частіше або навіть паралельно по кілька одиниць одночасно, і при цьому дистанція між позиціями окремих вимірів тут може бути значно коротшою. Таке зі свого боку потенційно дозволяє виявляти зони аномалій, що є слабкішими за проявом або меншими за геометричними розмірами, а також точніше визначати границі інших протяжних об'єктів, наприклад, трубопроводів чи кабелів, хоча безумовно коли це стосується менших глибин їх залягання під тією поверхнею, з якої мають бути проведені вимірювання. Сучасний магніточутливий сенсор [14] із відповідним давачем та перетворювачем як привабливий функціональний компонент навіть є вмонтованим у деякі смартфони, наприклад, у iPhone 3GS [15], де його використано для виміру напруженості поля та визначення напрямку за магнітним меридіаном поряд із функцією глобального геопозиціювання (GPS). При цьому фактично досяжна найвища точність, а тим більше - роздільна здатність таких вимірів для орієнтації обмежена як правило лише 1…2 кутовими градусами (при відсутності завад), хоча на екрані подібного "гаджета" може у використаному форматі відображатися величина із хвилинами та навіть кутовими секундами. Та точність, що стає практично достатньою для більшості швидкодіючих навігаційних приладів, це є лише сумнівне досягнення у дослідницький діяльності, яка спрямована на виявлення всіляких закономірних, але дуже малих проявів підповерхневих магнітних аномалій. Професійні магнітометри, що сьогодні стали досить звичним інструментом геофізичних досліджень, вже також є дійсно малогабаритними, як наприклад, вироблений в Україні пішохідний магнітометр "Аномалія" [16], але все ж вони значно більші за розмірами у порівнянні із звичайним "кишеньковим" спорядженням через їх оснащення відокремленими спеціалізованими контейнерами для встановлення надчутливих сенсорів, що теж є орієнтованими на використання як польове знаряддя. Залежно від типу базового сенсора ці пристрої оптимізовані на різні діапазони напруженості поля, а кращі з них мають роздільну здатність на ріні 0.001…0.007 нТл і перекривають значення у вимірювальних шкалах від 10 до 100000 нТл, та ще їх конструктивне оформлення існує у широкому виборі варіантів, включаючи занурювані підводні апарати [17]. За принципом взаємодії із навколишнім магнітним полем такі прилади мають дуже різноманітні сенсори. Деякі сприймають створюване силою магнітної взаємодії пряме механічне переміщення легких деталей, як наприклад, мініатюрного ротора, що є аналогом магнітної стрілки компаса (механічні вимірювальні засоби), або згустку макрочасток у магнітному резистивному порошку між кількома електродами (електротехнічні прилади), а інші таку ж взаємодію на рівні доменних структур феромагнетика у деталях ферозондів, що обумовлює його змінювану ефективну магнітну сталу. Електронні сенсори реагують на магнітний вплив на траєкторії руху носіїв елементарного заряду, що зумовлює функціональну зміну електропровідності плівкових приладів на ефекті Холла та напівпровідникових магніторезисторів, або ж їх параметри залежать від частоти прецесії ядер, як це використано у протонних магнітометрах [14]. Більш простими у конструктивній реалізації, виконаної із дискретних радіокомпонентів, постають ферозондові сенсори приладів, що передбачають присутність лише кількох звичайних радіодеталей та дротових котушок. На протилежність їм плівкові магніторезистивні сенсори та прилади на ефекті Холла можливо досконало виконати лише із застосуванням сучасних групових технологій масового виробництва у вигляді спеціалізованих електронних інтегральних мікросхем. Цим у більшості обумовлено їх широке застосування у промисловій автоматиці та навігаційній апаратурі. Однак отримана при цьому межа по точності та чутливості цих дійсно мікромініатюрних модулів як вимірювальних сенсорів досі ще є найгіршими серед порівнюваних видів, але і такого все ж стає достатнім у багатьох формах загальних застосувань. Закінчені прилади побудовані як такі, що загалом вимірюють або тільки скалярну складову вектора напруженості локального магнітного поля, наприклад, із відомим використанням протонних сенсорів, або ж одночасно надають і просторову інформацію, але у більшості із меншою точністю як по величині модуля напруженості поля, так і по кутах спрямування його максимуму. Основна кількість моделей достатньо портативних магнітометричних приладів із осьовою чутливістю для виразу даних, отриманих вимірюванням, передбачають наявність окремих засобів їх досконалої "прив'язки" хоча б до вибраного як базова лінія напрямку руху на трасі досліджуваної ділянки, а неминучі при цьому відхилення фіксують як кутові геометричні виміри іншими кутомірами. У такий спосіб найчастіше весь протокол суміщених результатів є 4 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 сформованим лише вручну як файл даних із клавіатурним комп'ютерним набором цифрових текстів. Значно більш дорогі та досконалі магнітометри із засобами геопозиціювання професійного рівня навпаки у більшості пристосовані до стаціонарного встановлення у визначеній точці простору та наступного прецизійного та подовженого у часі виміру саме в цій локації флуктуацій модуля та дрейфу спрямування вектора магнітного поля як фізичного явища планетарного характеру. Для таких використань запропонована достатньо велика кількість різноманітних за принципом дії та конструкцій їх сенсорів, включаючи і такі, що засновані на ефекті відхилення реальної магнітної стрілки, хоча при цьому подібне технічне рішення, що відоме протягом століть, передбачає застосування найсучаснішої технології підвісу самого ротора та покращення роздільної здатності шляхом лазерного із багатодзеркальним двоходовим оптичним подовженням плеча вимірювального важеля до його приведеного рівня довжини у 30…50 метрів [18], що із сталим налаштуванням на магнітний меридіан фіксує можливі відхилення до кількох сотих кутової секунди за добу спостережень. Інша значна кількість прикладів розробок магнітометричного устаткування орієнтована на оснащення ними технологічних повітряних суден чи новітніх безпілотних літальних апаратів, що навіть із застосуванні додаткових заходів [19] принципово не надають потрібної на сьогодні роздільної здатності у геометричному просторі на місцевості на рівні до кількох сантиметрів, яку вже зараз потрібно, наприклад, при обслуговуванні трубопроводів чи підземних кабельних укладок для мереж енергопостачання чи швидкісних зв'язкових комунікацій. Достатньо чутливі та розміщені біля самої поверхні ґрунту магнітометри здатні виявляти не тільки аномалії, пов'язані із феромагнітними включеннями природного (рудні поклади) чи штучного походження, але також каналізовані в перезволожених горизонтах електрострумові шляхи, через які відбувається поступова деполяризація на місцевості, складеній із природних або сформованих конструктивно (катодний захист трубопроводів) гальваноактивних областей. Такі струмові магнітні поля, що є співставленими у їх вимірах із розподіленням ґрунтових потенціалів та інколи також із рівнем питомої електропровідності на окремих локаціях ділянки, є виключно потужним носієм інформації стосовно структури та матеріального вмісту окремих досліджуваних шарів та цілих горизонтів [20]. Електрометричні засоби дослідження, якими все частіше доповнюють магнітометричні дані, фіксують як певні зміщення в очікуваних ізолініях розподілу локального стабільного поля, що виникають завдяки канальним струмам від джерел живлення і сконцентрованим по напрямках найбільшої електропровідності. Такі області у більшості випадків напряму пов'язані із зонами потенційної нестабільності: повзунами, осипами чи проваллям ґрунту [21], які заповнені рідиною. Будівельні конструкції, особливо ті, що межують із зонами зі змінюваними періодично навантаженнями на транспортних магістралях, потрапляють в умови підвищеного експлуатаційного ризику, якщо подібні місця не будуть вчасно виявлені та оброблені цілеспрямованими підкріплюючими інженерними заходами. Для виявлення аномалій електропровідності як наслідків різної у кількості та за хімічним складом іонної концентрації на суміжних ділянках потрібно щонайменше ретельно вимірювати різницю потенціалів [21] між заглибленими на кілька сантиметрів або ж навіть притисненими до поверхні гальваноємнісними площинними електродами, відстань між якими є постійною. При цьому частотний діапазон отриманих електричних коливань може становити від практично постійного струму до кількох кілогерців, якщо використано допоміжний генератор [22]. Усі подібні виміри виконують у пасивному (без зовнішнього генератора), "віддаленому" та активному (із синхронізованим генератором) режимах. Електропровідність глинистих ґрунтів має чіткий максимум на межі їх зони пластичності на діаграмі навантаження, де виникає текучість внаслідок розриву крупних часток через зволоження нижньої частини окремого шару, наприклад, завдяки "лінзам" накопичення, які виникають випадково і є наслідком фільтрату ґрунтових вод навіть із віддалених перезволожених ділянок. Достовірно виявити такий стан [23] послаблення опорного середовища будівельних конструкцій на схилах дистанційно іншими засобами, ніж електрострумові та магнітні, досить проблематично. При розташуванні електродів на відстані технічної нескінченності у "віддаленому" просторі та одночасно у наближенні до вимірювальної системи [24] стає можливим виявити окремі горизонти розташування порід із відмінною питомою електропровідністю. При цьому точність розпізнання суттєво залежить від способу заглиблення найбільш наближеного електрода [22] та кількості точок зняття вимірів на поверхні. Але саме такі обставини складають головну причину значної трудомісткості процесу подібних вимірів, які пов'язані із безумовною попередньою інженерною підготовкою досліджуваних ділянок. 5 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 Серед "ручних" засобів для виявлення та вивчення особливостей приповерхневого шару ґрунту з метою, наприклад, археологічних досліджень, магнітометри та електрозонди [25, 26] використовують значно частіше, ніж дорогі та складні в експлуатації георадари різного принципу дії. Однак і тут основну трудомісткість складають процедури суміщення в одній геодезичній базі множин вимірювальних даних, навіть коли вони виконані з використанням переносних комп'ютерних засобів, де на носіях інформації сформовано окремі файли, тому що кінцева прив'язка окремих точок на ділянці через виміри дистанцій і встановлення відповідних координат є в основному немеханізованою ручною операцією. Найбільш сучасним методом в цьому разі є використання польових контролерів [27] та спеціалізованих програмних пакетів, що відображають числові дані у відповідності із картографічними позначеннями, але і їх точне "накладання" на реальну поверхню ґрунту у точках, де саме проведені виміри, потребує достатньо відповідальної операторської роботи та наступний обов'язковий незалежний контроль якості її виконання. У широкій номенклатурі геофізичного обладнання [28, 29] серед аксесуарів є триопорні штативи різних конструкцій, що забезпечують надійну просторову фіксацію закріплених на їх оголовках нівелірів і тахеометрів при визначенні кутів та відстаней до оточуючих об'єктів. Такі штативи треба переносити вручну та переставляти з позиції на позицію, а вже по факту стоянки "прив'язувати" кожну з них до відповідних координат клавіатурним набором. І при цьому важільними чи гвинтовими упорами треба виконувати обов'язкові налаштування для досягнення точного напрямку приладної вертикалі також вручну без застосування будь-яких пристроїв, які діють механізовано і узгоджено відповідно до показів на шкалі електронних приладів. Хоча вже з'явилися повідомлення про так звані "роботизовані" засоби, але які ще не набули поширення чи взагалі досягли рівня хоча б вживаних. Спеціалізовані приладні платформи [30], які здатні в автоматичному режимі зберігати деякий потрібний час стан спокою при вібраціях та попередньо набуте спрямування при відносно невеликих еволюціях курсу транспортного засобу, на кронштейнах корпусу якого вони встановлені, використовують як правило під час аерофотозйомки та фотометричних, радіологічних і магнітометричних дослідженнях на малих висотах із борту вертольоту [31] оглядом панорамою або по окремих точкових установках. Але контактні вимірювання у такий спосіб принципово неможливі так само, як і сприйняття будь-яких акустичних (пружних механічних) коливань з поверхні фунту навіть за допомогою підвісних гондол, що опускаються до поверхні, через особливості самого виду транспортування і недосконалість конструкцій більшості відомих типів носіїв для розташування такої вимірювальної апаратури, дуже чутливої до завад різного фізичного походження. В разі використання електрозондів потрібен гальванічний контакт, якість якого суттєво залежить від кількох умов у тому числі і від сили притискання важелів з електродами до поверхні, а при реєстрації акустичних шумів геофоном [32] та мікросейсмів додатковою умовою виходить ще і певний рівень жорсткості та здатність до гасіння самостійних коливань в опорах використаної приладної платформи, де закріплені відповідні сенсори [33, 34]. Відомі вживані методики дослідження динаміки процесів ґрунтоутворення та ерозії в частково заглиблених приповерхневих шарах у місцях штучно створеної нестабільності, наприклад, у котлованах, а тим більше у матеріалодобувних кар'єрах із вибуховими роботами, коли таке вимірювання виконують періодичною реєстрацією параметрів розповсюдження потужної пружної хвилі, збудженої контрольованим вибухом, сила якого визначена з високою точністю [35]. Вимір пружних коливань від мікросесмів сучасними портативними та пересувними засобами [36] є виконуваним не тільки з високою роздільною здатністю (24 двійкових розряди у зафіксованих кодах), але також за двох- або трьохосьовим принципом та ще із виявленням крутильних мод у коливальних рухах. Саме це у режимах із багатоточковим одночасним зніманням картини хвильового процесу, збудженого хімічним або електричним вибухом, надає найбільш деталізовану інформацію, але при одноразових вимірах вона має статичний характер. Виявлення динаміки розвитку повільних зсувних процесів потребує повторення таких достатньо громіздких і дорогих досліджень із періодичністю у кілька діб та ще частіше протягом до півроку. Іншим недоліком методик саме сейсмографічних досліджень є відносно мала верхня межа частотного діапазону зареєстрованих коливань (тільки для окремих пристроїв це доходить до одиниць кілогерців), що в багатьох випадках зумовлено те тільки конструкцією самих сенсорів, але також і способом їх встановлення та формою досягнутого акустичного контакту із тілом ґрунту. Однак відомо, що відмінності у спектрі вищих гармонійних складових (їх межа досягає кількох сотень кілогерців) є носіями важливої інформації про характер релаксації напружень у твердих тілах, що є базою знань швидко прогресуючої галузі діагностики, пов'язаної із 6 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 вивченням проявів акустичної емісії [37], а також розробкою парку відповідного обладнання [38]. Якщо спочатку акустоемісійні методи знаходили впровадження відносно суцільних та однорідних зразків, то вже зараз це торкається композитних матеріалів [39] та складних багатошарових угрупувань із дотичних конструктивних модулів, а також геологічних структур [40, 41]. В сейсмології в останні десятиліття було відкрито як стабільне явище та започатковано систематичне вивчення ефектів модуляції сейсмічних шумів [42], що також передбачає фіксацію та виділення на тлі все зростаючої інтенсивності коливань від індустріальних об'єктів унікальних сплесків акустичної активності, яка безпосередньо пов'язана із нелінійними процесами, що мають протікати як у глибинних шарах, так і в окремих місцях безпосередньо під поверхнею, що навантажена капітальними спорудами, наприклад, на кам'янистих гірських схилах, де є вихід суцільних масивів твердих порід. Розташування чутливих широкосмугових сенсорів акустичних, електро- та магнітометричних давачів для подальшої цифрової обробки інформаційного потоку від цих сигналів, які отримані з поверхні досліджуваної ділянки, характерно, в першу чергу, тим, що ніколи не відомо наперед, чи є вибрана позиція спостереження оптимальною (або хоча б придатною) для виділення окремих груп зареєстрованих відмінностей значень у мантисах послідовних відліків для їх інтерпретації як очікуваних ординат огинаючих вимірюваних природних коливань. Через дифракцію та інтерференцію пружних хвиль і неоднорідність електропровідності в структурах матеріалу на значних площах завжди існують зони практично повної відсутності деяких очікуваних природних сигналів, і навпаки, є місця із пучностями амплітуд для окремих видів шумів та електромагнітних завад. Виходом із такої ситуації при вимірюваннях як правило постає попередньо заплановане суттєве збільшення кількості точок знімання комплексних сигналів, що породжує цілу низку труднощів технічного плану. Розташування кількох тисяч сенсорів давачів для одночасного покриття усіх запланованих точок на досліджуваній ділянці навряд чи є на сьогодні доступним економічно як сучасне технічне рішення, а от використання навіть відносно простих триопорних штативів із кількома встановленими на них засобами вимірювання [43] різного спрямування - випробуваний практикою технічний прийом для послідовного обслуговування по групах експериментів місць стоянки [11] приладів для вимірів. У реальній перспективі для робіт на великих територіях це мають бути різного виду спеціалізовані рухомі платформи для монтажу на них як на носіях декількох паралельно працюючих пристроїв. Однак при цьому при послідовних переміщеннях завжди існує похибка відносно планового їх фактично досягнутого поточного позиціонування для кожного з приладів чи їх сенсорів, яку необхідно зменшити або хоча б врахувати як варіант отриманого комплексу даних у відповідному масиві. Також треба додати значну технічну проблему, пов'язану із масо-габаритними показниками як переміщуваного вантажу (особливо джерел живлення), так і самого технічного засобу для здійснення ним на постійній основі періодичного переносу вже сьогодні від кількох десятків та в перспективі навіть до двох сотень одночасно працюючих в штатному режимі сучасних портативних приладів для геофізичних досліджень. Традиційні пасивні колісні шасі, якими нерідко доповнюють склад базового обладнання для важких нелінійних георадарів, а тим більше активні (електромоторні) коткові або гусеничні транспортні засоби без принципових змін в їх конструкції навряд чи підійдуть для виконання точних електро- і магнітометричних та акустичних вимірювань через значні викривлення розподілу природних полів безпосередньо в місцях виміру та шумові ефекти від їх працюючих механізмів. І незважаючи на очевидні за останні роки успіхи в розробці різних видів "крокуючих платформ" [44] та екзоскелетів [45] з досконалими мультипроцесорними і біомеханічними пристроями керування достатньо злагодженими рухами при переміщенні опор, все ж ці знаряддя ще так і не набули ознак пристосувань для майбутнього широкого практичного використання. Із наведеного аналізу засобів геодезичного (топографічного) та геофізичного (діагностичного) напрямків робіт у безпосередньому контакті з реальним ґрунтом на поверхні великих будівельних майданчиків чи при польових дослідницьких роботах (особливо в умовах часових обмежень) стає зрозумілим, що вочевидь бракує достатньо легких і оптимально спеціалізованих транспортерів, які здатні до самостійного автономного пересування на обмежену дистанцію по пересіченій місцевості, але із дуже точним дотриманням усіх встановлених умов руху, а також фіксацією необхідних даних для трасологічних протоколів одночасно із збереженням заданої програмно точної орієнтації у просторі встановлених на їх вантажних платформах чи в інших відповідних функціям вимірювань місцях кріплення 7 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 численних сенсорів давачів для одночасного і паралельного виміру повного комплексу різних за фізичним змістом параметрів довкілля. При цьому добре відомо, що певний ряд геофізичних параметрів, наприклад, акустичних чи електрострумових, якісно вимірюють лише контактним методом, коли відповідні сенсори знаходяться нерухомо до кількох десятків хвилин у гарантовано стабільному стані в безпосередньому контакті із чітко визначеною частиною поверхні досліджуваної ділянки. Численні варіанти засобів для проведення дистанційного вимірювання на рухомих об'єктах від найпростіших одноканальних, наприклад таких, як у медичних дослідженнях ритмів серця спортсмена-бігуна із застосуванням акустично-вібраційного конденсаторного електромеханічного перетворювача [46] та здійснення ним безпосередньої параметричної частотної модуляції несучої сигналу в УКХ-передавачі [47], до багатоканальних часовоімпульсних засобів передавання телеметричних сигналів, - усі вони обмежені смугою радіочастот, яка допустима для її використання комплексним радіосигналом без створення перешкод іншим засобам у суміжних каналах зв'язку. Тим більше, коли такий канал передає у пакетному режимі як цифровий код дуже ущільнений наслідок аналогово-цифрової обробки коливань від довільного аудіо джерела, що є принциповою особливістю у мобільній телефонії за найбільш поширеним на сьогодні стандартом GSM. Враховуючи кількість можливих паралельних каналів для трансляції даних геофізичних вимірювань, де поряд із низькочастотними складовими мають бути зафіксованими та оперативно обрахованими складові спектра з еквівалентною частотою у кілька сотень кілогерців, загальним та найбільш сучасним і продуктивним постає технічне рішення сформувати достатньо потужну цифрову систему обробки даних, що діє постійно, та вона є розташованою безпосередньо біля самих численних давачів із їх сенсорами, частина з яких час від часу у робочому режимі вимірювань є введеними у прямий контакт із поверхнею ґрунту на досліджуваній ділянці об'єкта. І тільки потім після завершення проміжних циклів оперативної обробки даних періодично виконувати трансляцію, наприклад, ресурсом цифрового оптичного чи звичайного широкосмугового радіоканалу, але тільки для максимально фільтрованих, стиснених та захищених даних. При цьому дані усієї метрики та умов механічних рухів уздовж кожного з елементів програмованої траси пересувань є такою ж важливою інформацією, як і самі геофізичні дані, бо вони несуть відомості не тільки для встановлення координат актуальної позиції сенсорів вимірювального комплексу, але також і про опорний стан та мікропрофіль поверхні, дотичної до сенсорів давачів. Оціночний підрахунок, зроблений вже для найближчої перспективи із згаданої усієї множини паралельно задіяних сенсорів та давачів в описаній вище гіпотетичній автономній геофізичній вимірювальній системі, показує, що їх загальна кількість становитиме величину на рівні від кількох сотень і більше, де три або чотири десятки із цих давачів є обов'язково широкосмуговими і високочастотними, а не менше двадцяти інших дуже чутливих до випадкових завад під час вимірів мають бути під час робочого циклу вимірювань у виключно стабільному положенні протягом хоча б кількох хвилин. І при цьому для реалізації деяких передбачених програмою вкрай необхідних спеціальних режимів накопичення даних послідовних вимірів такий час із кожним стабілізованим статичним положенням сенсорів може бути подовжено до кількох годин та навіть цілої доби. Специфіка досконалих геофізичних досліджень полягає ще й у тому, що протягом усього часу вимірювань повний комплекс отриманих поточних даних із різних джерел має бути доступним для порівняльної оперативної оцінки, як це стає в останні роки можливим із звертанням до машинних носіїв архівних даних при камеральній обробці з метою виявлення слідів окремих артефактів на тлі інтенсивних шумів. Інакше фільтрація не може бути адаптивною, а значить і якість отриманих унікальних даних різко знижується. Крім викладеного, особливими рисами застосованого обчислювального ядра в польовій геодезичній вимірювальній системі мають бути висока надійність швидкісних обчислень, що є кожного разу виконуваними в умовах постійної дії великої кількості одночасно присутніх погодно-кліматичних та сильних фізичних дестабілізуючих факторів. Тут спостерігаємо температурні перепади та зволоження деталей через конденсат, поштовхи при переміщеннях, можливі різноманітні вади електроживлення та електромагнітні перешкоди під час інтервалів роботи розташованої поблизу потужної передавальної зв'язкової апаратури комунікаційного радіоцентру тощо. Крім цього від конструкції обчислювального ядра потрібна те тільки загальна надійність, а також гарантована ремонтопридатність і безперебійність в роботі для використаних форм тимчасових сполучень із різноманітними приєднаними зовнішніми пристроями. Усе це як правило притаманно тільки для спеціально розроблених з урахуванням 8 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 таких особливих умов раціонально дубльованим та резервованим у своїх функціях технічним системам, оптимізованим для певного напрямку їх використання. Фізичні розміри та кількість задіяних обчислювальних засобів на сьогодні, коли мільйонами випускають планшетні комп'ютери, а серед них вже багато моделей споряджені восьмиядерними мікропроцесорами, і навіть окремий завершений повноцінний міні комп'ютер на одній платі зменшено до "розмірів поштової марки" [48], ці показники втратили головну визначальну обмежувальну характеристику для "великої" системи. Натомість принципова досконалість використаної структури зв'язків, як така, що з'являється, наприклад, із застосуванням методу Ant Colony Optimization [49], де тепер об'єднано вже не десятки, а десятки тисяч функціональних та обчислювальних компонент, почала відігравати ключову роль у досягненні потрібної продуктивності та надійності. Відоме технічне рішення для об'єднання реально необхідної кількості швидкодіючих давачів і вимірювальних перетворювачів у межах інформаційно-вимірювальної системи [50], яка складена із закономірно з'єднаних кластерів, що включають по три мікропроцесорних вузла з інтерфейсними пристроями, де загальний період синхронного опитування давачів для трьох рівнів розділено в часі на три частини, і в кожній з них відображено цифровий еквівалент вимірюваної величини із зрушенням у часі на одну третину періоду. При суміщеній обробці даних трьох незалежних вимірів в межах одного такого кадру із зафіксованими кодами вимірюваних величин, отриманих від різних сенсорів, фактична роздільна здатність може бути підвитцена майже удвічі тільки за рахунок зниження похибки від дискретизації, а ще більше при застосуванні математичних методів апроксимації, де відповідно в три рази збільшена кількість опорних ординат. Застосовані у цій системі засоби досконало синхронізованої багатомашинної обробки усуспільненої інформації, частки якої циркулюють резервованими шляхами, і де в самих мікропроцесорних вузлах із власними парками запам'ятовуючих пристроїв організовано швидкісний доступ до необхідних архівів, в кінцевому рахунку забезпечують крім усього іншого безперервний порівняльний аналіз поточних даних та зниження завдяки такому різних впливів випадкових факторів. При цьому потрібна працездатність як мережевої системи тут може бути встановленою на етапі початкової ініціалізації навіть при фізичній відсутності більшості передбачених в досконалій структурі каналів зв'язку, коли є підключеними тільки нечисленні з них, що складають обов'язковий мінімум для функціональної зв'язності. Але за прототип вибрано більш складну інформаційно-вимірювальну систему [51], побудовану як гіперсистему, де описана вище трирівнева резервована відмовостійка система [50] є лише однією з її частин, тобто виступає як підсистема, що зберігає усі свої позитивні властивості щодо надійності та продуктивності. Поєднані разом згідно із технічним рішенням для побудови гіперсистеми [51] окремі угрупування в її складі виконують роль автономно працюючих, але логічно і технічно зв'язаних підсистем [50] доти, поки не виникає потреби оперативної обробки усіх суміщених даних, що отримані від технічно достатньої (лише логічно обмеженої проектним завданням) кількості давачів з їх різноманітними сенсорами, які встановлено у визначених місцях відповідно із дослідницькою програмою. Передбачені резервовані шляхи передавання інформації та потрійна кількість мікропроцесорних вузлів, що складають кожний кластер, включаючи і кластер супервізорного рівня, гарантують достатньо високу продуктивність при багатозадачному способі функціонування із режимом паралельних обчислень та необхідний резерв технічних засобів в разі короткочасного блокування чи навіть тимчасової відмови якого-небудь із мікропроцесорних вузлів, який при цьому можливо автоматично вивести з числа активних засобами внутрішньої діагностики та реконфігурації інформаційних зв'язків. Однак запропонована і описана тільки як основа для побудови будь-якого неспеціалізованого пристрою для автоматичного вимірювання в довільній кількості точок і одночасної обробки великого обсягу сполучених даних вказана гіперсистема [51], що саме в цій заявці прийнята за прототип, не має жодних вказівок на форми застосування досить специфічних засобів, які тим чи іншим шляхом роблять її апаратний склад чи саму структуру оптимізованою виключно для геофізичних застосувань. Різноманітні сенсори чи навіть відокремлені давачі як відомі часткові складові поза межами конструктивно оформлених засобів вимірювання фізичних величин у приладах геофізичних досліджень взагалі не мають відповідних інформаційних виходів для їх безпосереднього з'єднання з перетворювачами у мікропроцесорних вузлах означеної гіперсистеми. В іншому варіанті гіпотетичне підключення до відповідним чином додатково модифікованих для цього та помітно ускладнених інтерфейсних пристроїв мікропроцесорних вузлів якихось вибраних одиниць промислових геофізичних приладів, що дійсно мають досконалий цифровий вихідний 9 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 канал даних, наприклад такий, що підтримує дисципліну обміну у стандарті RS 232 або RS 485 [4], чи навіть USB 3.0 [5], за певних сумнівних умов збереження попереднього рівня надійності можливо і надає очікуване зростання числа видів досліджуваних специфічних параметрів довкілля та кількості точок для знімання необхідних інформаційних сигналів. Але поряд із очевидним при цьому значним і непропорційним збільшенням вартості такого комплексу не виникає навіть принципових вказівок на реальні шляхи до вирішення інших двох суттєвих проблем механізації та автоматизації вимірювальних процедур на ділянці, пов'язаних як із самим предметним переміщенням у фізичному просторі усіх засобів вимірювання, так і з раціональним збиранням та урахуванням необхідних поточних показів для складання внутрішніх масивів опису особливостей зовнішніх механічних і кліматичних впливів та точного позиціювання самих сенсорів давачів цих приладів, які стають основою загальних трасологічних та операційних протоколів. Без таких даних розширена кількома окремими одиницями чи навіть десятком конструктивно завершених пристроїв для геофізичної зйомки ця гіперсистема [51] залишається суттєво ускладненим виробом лише для паралельного поточного оброблення даних від обмеженої множини, але кожного разу вручну статично встановлюваних окремих комплектів приладів, хоча б із використанням їх прив'язки до системи координат місцевості засобами геопозиціюваня GPS. З іншого боку просте додавання інформаційних потоків, наприклад, від самостійних давачів переміщень будь-яких легких рухомих платформ, де можливо розташувати окремі геофізичні прилади, є теж проблематично поліпшуючим і частковим заходом бо поряд із очевидним ще більшим ускладненням системи тоді завжди виникає загальна невизначеність чи тільки неоднозначність із геометричним положенням деталей самої платформи у її локальному просторі, наприклад, виміри величини кутів розвороту оголовків або кожного із столів для встановлення типових приладів, а також відповідності цим параметрам у поточних налаштуваннях сенсорних частин чи самих приладів в умовах їх постійних мало контрольованих переміщень. І ця невизначеність на сьогодні не має простого шляху для її уникнення. Більшість сучасних геофізичних чи геодезичних приладів ще не мають* зовнішніх каналів для досконалого виводу інформаційних потоків, що пов'язані із протоколюванням умов проведених вимірів відокремлено від самих масивів даних із вимірюваних величин, а тим : більше для оперативної та дистанційної корекції частини налаштувань в разі потреби. Очевидно через такий стан якість даних, отриманих від неадаптованих пристроїв не може бути достатньо високою чи інколи навіть задовільною. Виходячи із проведеного аналізу рівня існуючих технічних розробок як у вигляді промислових виробів, так і технічних рішень, доведених до патентоздатних пропозицій, стає зрозумілим, що головною технічною задачею, яка має вирішуватися при створенні автоматизованої інформаційно-вимірювальної системи, орієнтованої на геофізичні дослідження паралельно із геодезичною зйомкою особливостей майданчика, де заплановано проведення екстрених чи потенційно небезпечних робіт, є раціональне і глибоке за технічним змістом об'єднання сенсорної, обчислювальної та керованої механічної частин системи в єдиній завершеній конструкції самого виробу так, щоб ця інтеграція у кінцевій реалізації сприяла технологічному спрощенню і збереженню високої надійності та мобільності у різноманітних застосуваннях як автономно, так і у складі комплектів із аналогічних засобів. Загальними конструктивними ознаками найближчого аналога та інформаційновимірювальної системи, яка запропонована згідно із цією заявкою на отримання патенту, є те, що всі вони включають давачі з вимірювальними перетворювачами та мікропроцесори з інтерфейсними пристроями, і з них сформовано основу мікропроцесорного вузла, а також канали міжвузлових зв'язків, із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, в якій мікропроцесорні вузли розподілені на окремі функціональні рівні в межах системи, і мікропроцесорні вузли для кожного з цих рівнів з'єднані каналами міжвузлових зв'язків по три в одному кластері, при цьому вона є складеною з двох окремих подібних підсистем, а мікропроцесорні вузли кластерів верхнього рівня кожної з підсистем підключені до трьох додаткових мікропроцесорних вузлів, з'єднаних каналами міжвузлових зв'язків так, що вони утворюють спільний для цих підсистем кластер супервізорного рівня. Суттю винаходу є технічне рішення для подолання раніше обговорених принципових недоліків, характерних для відомих аналогів, а саме прийняті заходи для спрощення конструкції спеціалізованої системи і підвищення її надійності та ремонтопридатності при одночасному поліпшенню загальної функціональності, досягнення оперативності й достовірності даних у вигляді потоку цифрових кодів, що циркулюють в системі, які отримані при автоматизованому виконанні послідовних вимірів геофізичних параметрів на досліджуваній ділянці одночасно із точною прив'язкою до точок у геометричному просторі при програмованих самостійних 10 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 механізованих пересуваннях як закінченого виробу та в умовах дії ряду дестабілізуючих кліматичних та механічних факторів. Таке стає можливим в разі досконалої інтеграції між собою функціональних вузлів різного спрямування та реалізації логічних зв'язків як між мікропроцесорними вузлами, так і з усіма сенсорами давачів різноманітного призначення, коли при цьому структурно створено необхідне розмежування між технічними засобами, що формують нижні та вищі функціональні рівні у поєднуваних підсистемах. Позитивний результат в запропонованій системі отримано завдяки тому, що її електронні блоки безпосередньо асоційовані як із базовою структурною одиницею для всієї системи з гнучкою функціонально орієнтованою механічною несучою конструкцією, складеною із обертально рухомих важелів та стрижнів рам так, що сенсорні електронні складові давачів кожної із окремих підсистем є розташованими у деталях конструкції та ребрах двох різних з'єднаних механічно стрижнево-шарнірних рам, виконаних переважно із немагнітного діелектричного матеріалу і оснащених кожна трьома периферійними рухомими важільними опорами, при цьому окрема множина давачів має сенсори, які приєднані до самих стрижнів так, що вони відображають поточні зміни їх просторового стану при змішуванні будь-яких стрижнів та важелів, інша множина давачів, які приналежні переважно до мікропроцесорних вузлів кластерів нижнього рівня у обох підсистемах, має сенсори, що прикріплені рухомо до відгалужень опор, і при їх переміщені в робоче положення забезпечують постійний електричний та акустичний контакт із ділянками твердої поверхні біля п'ят важелів опор кожної із стрижневошарнірних рам, а поточний стан локального магнітного поля біля кожної з цих ділянок є визначеним завдяки його взаємодії із закріпленим на опорі магніточутливим сенсором окремого давача, підключеного до мікропроцесорного вузла кластера цього самого рівня відповідної підсистеми. Крім того, просторовий стан стрижнів стрижнево-шарнірних рам та важелів опор в робочому стані є зафіксованим двоходовими циліндрично-штоковими телескопічними штангами контрольованої зміни довжини, що у своєму складі в їх робочих порожнинах мають речовину, яка знаходиться в рухому стані під тиском, вищим за тиск у навколишньому середовищі. Також сенсорні частини для давачів складних обертальних і зсувних лінійних зрушень деталей гнучкої функціонально орієнтованої механічної несучої конструкції та суміжних деталей приладів в складі давачів орієнтації і стабілізації виконані як інтегровані в елементи їх механічної складової комплексної конструкції обкладинки конденсаторної частини високочастотних електричних кіл, де їх живлення здійснено по однопровідній схемі. Позитивний техніко-економічний ефект забезпечують підвищені експлуатаційні характеристики інформаційно-вимірювальної системи, що мають бути отримані при її використанні в автоматичному режимі в несприятливих умовах при автономній роботі на ділянках, де треба швидко отримати заданий обсяг геофізичних даних з їх безпосередньою і одночасною прив'язкою до координат точок у геометричному просторі. Збільшення кількості узгоджено діючих давачів і встановлення їх сенсорів з протокольованими по програмовано змінюваному місцю розташування та умовам взаємодії із поверхнею, де ведуться дослідження, гарантує сумісність усіх даних про такі суттєві геофізичні параметри обслуговуваного об'єкта, як електрична та акустична активність, а також просторовий розподіл напруженості локального магнітного поля, отримані з мінімальною можливою похибкою через вади поточного позиціювання та якості стабілізації під час вимірювальних операцій, а також через дію зовнішніх електромагнітних завад та інших перешкоджаючих механічних та кліматичних факторів. Крім того завдяки оперативній паралельній обробці усього масиву даних, що надходять під час вимірів, стає можливим як самостійна адаптація до реальних умов довкілля, так і організація безпосереднього діалогу наявних апаратних засобів із загальним центром керування та накопичення даних через оптичний чи радіоканал, підтримуваний мікропроцесорами супервізорного рівня системи як для заміни загальних програм дії, так і корекції поточних налаштувань залежно від виявлених особливостей роботи. Усе це досягнуто також при загальному спрощенні конструкції подібної системи як складного комплексного виробу та дотриманні єдності технології виготовлення більшості її компонентів. Зображення на фіг. 1 надає спрощену функціональну схему приєднання сенсорних частин давачів в межах однієї із двох подібних підсистем інформаційно-вимірювальної системи, де на кожному із трьох рівнів є кластери, які сформовані з трьох мікропроцесорних вузлів та каналів міжвузлових зв'язків, що є відгалуженнями від інтерфейсних пристроїв, а до складових кластерів підключені спеціалізовані давачі. На фіг. 2 у вигляді умовної просторової аксонометричної проекції відображено сполучення додатковими каналами міжвузлових зв’язків множин кластерів двох окремих довершених 11 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 інформаційно-вимірювальних систем, що разом в той же час здатні виступати як синхронізовані підсистеми однієї комплексної системи (гіперсистеми), де вона охоплює в єдиному інформаційному процесі всю множину встановлених давачів. Фіг. 3 показує у вигляді загального збирального аксонометричного креслення разом із розкладкою по окремих деталях запропоновану конструкцію нижньої частини опори із приєднаними рухомими сенсорами зовнішніх полів та інтегрованими сенсорами змін просторового стану стрижнів та важелів. Ортогональні проекції та спрощені аксонометричні зображення допустимих зрушень, що подані на фіг. 4, є ілюстрацією конструкції важеля опори із інтегрованими у сферичні елементи сполучень з стрижнями рам обкладинками конденсаторних сенсорів давачів зміни просторового стану. За допомогою умовно рознесених у просторі фрагментів аксономеричних зображень елементів на збиральному кресленні механічної частини несучої конструкції на фіг. 5 деталізовано показано запропоновану форму досягнення рухомого з'єднання між собою двох стрижнево-шарнірних рам та приєднання до них важелів опор. Зображення на фіг. 6 розкриває у необхідних деталях варіант конструкції рухомого з'єднання плати із приладним відсіком зі стрижнями рами, де використано інтегровані у самі елементи кріплення циліндричні обкладинки конденсаторних сенсорів зрушень повзуна відносно стрижня та їх підключення до керованого генератора високочастотних коливань давача. Три ортогональні проекції на кресленні фіг. 7 та показані окремо межі допустимих кутів обертання шарнірних сполучень відображають вимірювані із високою точністю відновні зрушення стрижнево-шарнірних рам та важелів гнучкої функціонально орієнтованої несучої конструкції інформаційно-вимірювальної системи, п'яти опор якої в цей час розташовано на горизонтальній поверхні площинної ділянки. На фіг. 8 у формі, що є аналогічною до використаної на фіг. 7, подано допустиме для точних вимірів через взаємні кутові зрушення деталей несучої конструкції і поточне положення опор стрижнево-шарнірних рам, коли їх п'яти встановлені у точках на довільно пересіченій та нахиленій поверхні. Зображення на фіг. 9 через розрізи в ортогональних проекціях розкриває особливості конструкції двоходової циліндрично-штокової телескопічної штанги контрольованої зміни довжини та кулькового конденсаторного сенсора давача тиску в робочих порожнинах циліндрів. Форми і місця кріплення телескопічних штанг та загальний вигляд як просторової моделі на фіг. 10 подані на схематичних принципових та повних аксонометричних зображеннях зібраної гнучкої функціонально орієнтованої механічної несучої конструкції інформаційно-вимірювальної системи як засоби фіксації довільного положення важелів у робочому стані. На фіг. 11 представлено у вигляді просторової моделі в аксонометричній проекції повністю зібрану механічну частину інформаційно-вимірювальної системи разом із умовною конструкцією плат з приладними відсіками, що є прикріпленими до стрижнів рам, і при цьому вся система як закінчений виріб показана у стані, коли вона розташована на горизонтальній опорній площині ділянки та готова до початку використання за призначенням. Зображення на фіг. 12 за допомогою двох ортогональних проекцій із розрізами кулькового бульбашкового ухиломіра розкриває механіку зміни електричної ємності у конденсаторних сенсорах давачів визначення горизонтального положення при довільних нахилах плати приладного відсіку. На фіг. 13 у формі, що є аналогічною до використаної на фіг. 12, подано конструкцію та допустимі переміщення масивного внутрішнього осередку, що виникають при роботі конденсаторного сенсора давача малих коливальних рухів плати приладного відсіку як сейсмометра-гравіметра. Дві ортогональні проекції на фіг. 14 з відповідними розрізами разом із просторовою схемою розташування елементів магнітного ротора відносно зовнішніх обкладинок його конденсаторних сенсорів відображають принципову конструкцію вхідної частини давача змін поточного напрямку орієнтації за магнітним меридіаном. Фіг. 15 надає деталізовану функціональну схему, що пояснює принцип та форму у послідовності каскадного підключення проміжних елементів при електричному з'єднанні інтегрованих в механічні деталі обкладинок конденсаторних сенсорів давачів із шиною даних мікропроцесора в одному із мікропроцесорних вузлів кластера, а також аналогічне приєднання електрометричного та стетоскопічного акустичного сенсорів за допомогою лінійного підсилювача через його взаємодію із варикапом, що визначає частоту коливань генератора. 12 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 На фіг. 16 схематично відтворено як збірку вузла, що розкладена по основних деталях у їх умовно зміщених аксонометричних зображеннях, принципову конструкцію шестиканального конденсаторного сенсора давача для сприйняття низькочастотних коливань із диференційною чутливістю по трьох просторових осях X-Y-Z. Три блоки, які складені із семи окремих діаграм, що суміщені разом по спільній часовій вісі, на фіг. 17 показують в умовній формі змінюваного геометричного обсягу графічних брусків поточну кількісну і часову активність усіх обчислювальних засобів, які є задіяними на трьох функціональних рівнях у кожній з двох підсистем, а також у мікропроцесорних вузлах на супервізорному рівні усієї гіперсистеми. Два зображення на фіг. 18 надають частини видів у прямокутній боковій проекції для додаткових виносних опор із встановленими на їх відгалуженнях сенсорами поряд із загальним виглядом в аналогічній проекції зібраної з усіх вузлів саму інформаційно-вимірювальну систему як конструктивно завершений виріб, що є готовим до початку експлуатації. Схематичне просторове зображення на фіг. 19 ілюструє організацію та розташування на місцевості створеного із запропонованих мобільних засобів тимчасово стаціонарного геофізичного вимірювального комплексу, орієнтованого для проведення подовжених у часі досліджень на польовому майданчику, де завдяки додатковим частинам повного комплекту із розширеного складу приладів забезпечено збільшену апертуру при отриманні даних від сенсорів інформаційно-вимірювальної системи, а також їх оперативну трансляцію сумісними засобами керування та віддалених комунікацій. Відомості, які підтверджують можливість здійснення винаходу. Сенсорними елементами або сенсорами, тобто саме тими частинами конструкції, що є чутливими до безпосередньої фізичної дії на них з боку середовища, в спеціалізованих давачах 1 (Фіг. 1) запропонованої інформаційно-вимірювальної системи виступають фізичні компоненти пристроїв електротехнічного чи електронного спрямування, які за своєю формою еквівалентної схеми при відповідному технічному виконанні як параметричних функціональних приладів в електричному колі є змінюваними комплексними опорами, що мають складові як активного, так індуктивного та ємнісного характеру. За правилом замикання контурів струму в будь-якому частковому колі вказаний функціонально змінюваний опір виглядає з'єднаним безпосередньо із двома вихідними терміналами (навіть коли є джерело зовнішнього живлення), з яких один термінал найчастіше виступає загальним для усього приладу і має умовний нульовий потенціал чи взагалі стає "заземленим", а тоді інший стає сигнальним: слугує носієм інформаційної складової аналогового сигналу. Залежно від факторів зовнішнього середовища, що саме становлять діючу фізичну величину, яку треба перетворювати у новий розподіл миттєвих значень електричного струму та вузлових потенціалів електричного кола у самому давачі 1, вихідну частину розглядають як таку, що або замикає його термінали для постійного струму як у резисторі якоїнебудь реальної величини (включаючи опір дроту із навивки у котушці змінюваної індуктивності), або ж стає фактичним розривом кола для постійного струму як у конденсаторі змінюваної ємності із мінімальним струмом наскрізного протікання, що ним у технічному розгляді як правило треба нехтувати через його вкрай малу величину. За необхідністю для узгодження форми і потужності первинних сигналів із вхідними показниками наступних функціональних пристроїв певна частина пристрою (тільки одного сенсора чи давача в цілому) є доповненою відповідними відомими засобами підсилювання або пропорційного аналогового перетворення: у фазове зрушення складових сигналу, відхилення частоти, часово-імпульсні співвідношення фронтів тощо. На фіг. 1 ці види давачів, які складені із відповідних сенсорних елементів, умовно показані графічними символами принципових електросхем або як резистор, а також як ідеальний конденсатор в межах колах зі стрілкою, що є виразом наявності потрібної функціональної залежності їх поточної величини від діючого зовнішнього фактору, який тут вже виступає первинною вхідною системною змінною. В такій формі, що є незалежною від принципової схеми не тільки сенсора, а також і реальної конструкції його вихідної частини, у кінцевому розгляді сам давач 1 постійно електрично підключений до відповідних входів вимірювального перетворювача 2, як подано у верхній частині зображення на схемі фіг. 1. Сигнальним виходом перетворювачів 2 переважно виступає складена із кількох паралельних гальванічних ліній шина зі змінюваним у часі станом розподілу потенціалів на її дротах, де вони у сукупності в кожну мить відтворюють певний поточний математичний цифровий код, що у вибраному форматі в системі прийнято визначати як діючий фізично цифровий вираз для цієї величини в її первинній аналоговій формі вхідної системної змінної. Виходи цифрових ліній вимірювальних перетворювачів 2, у свою чергу, приєднані до вхідних 13 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 пристроїв, наприклад, приймальних регістрів, керованих мікропроцесором 3 через наявні в типовій конструкції мікропроцесорного комплексу специфічні шини сигналів його вхідних даних. Також до мікропроцесора 3 (він на фіг. 1 показаний як невелике коло) приєднаний через набір його внутрішніх шин інтерфейсний пристрій 4 (для графічної відмінності його зображено як трапецію), від якого відгалужені зовнішні відносно мікропроцесора 3 лінії передавання цифрових кодів, наданих зміною електричних потенціалів на сигнальних дротах згідно з протоколом в одному із відомих стандартизованих форматів, і вони разом утворюють канали 5 зв'язків. Кожний комплекс, де є функціональні блоки, позначені позиціями 2, 3 та 4, існує в цій системі як основа її базового пристрою - мікропроцесорного вузла 6, в складі якого також можуть бути включені інші блоки чи модулі, наприклад, додаткові запам'ятовуючі пристрої, що не впливають принципово на конструкцію інформаційно-вимірювальної системи згідно із даним технічним рішенням. Вони на фіг. 1 показані окремим невеликим прямокутником, що межує у мікропроцесорному вузлі 6 із набором типових внутрішніх шин (подані умовно як кілька з'єднаних відрізків прямих ліній). Канали 5 зв'язків, які вийшли із інтерфейсного пристрою 4 одного мікропроцесорного вузла 6, на іншому закінченні є приєднаними до такого ж інтерфейсного пристрою другого подібного мікропроцесорного вузла. В системі вони виступили каналами міжвузлових зв'язків, а загалом усі разом фізично утворили спеціалізовану мережу передавання даних вимірювання у вигляді цифрових кодів так, що реалізовано з'єднання потоків інформаційних сигналів за естафетним принципом по окремих ланках від вузла до вузла як "точка-точка" ("point-to-point" або "port-toport"). Три канали 5 міжвузлових зв'язків з'єднали між собою три мікропроцесорних вузла 6 в єдине конструктивне угрупування, яке в прототипі і в цьому описі носить назву "кластер". В межах кластера кожний з його мікропроцесорних вузлів 6 є підключеним до двох сусідніх так, що реалізовано надсилання та приймання від них цифрових кодів через канали 5 міжвузловимх зв'язків та інтерфейсні пристрої 4 незалежно від технічного стану або режиму активності того з мікропроцесорних вузлів 6 цього кластера, який в таку мить не приймає участі в поточному інформаційному обміні. Це є можливим завдяки використанню крім стандартизованих видів каналів із такою функцією також зв'язок шляхом, наприклад, спеціально виконаних для подібної системи безметалевих каналів із окремих відрізків тонкого оптично-волоконного кабелю та лазерно-діодних електрооптичних перетворювачів на їх кінцях, де гранична продуктивність передавання цифрових кодів в кожній з автономних дільниць ланцюжка може бути піднятою до рівня у 3…10 Гбіт/сек та при цьому досягнуто практично повної нечутливості такої лінії до електромагнітних завад. А також відомо, що самі подібні канали в зоні їх прокладання не створюють локальних зовнішніх полів електромагнітного випромінювання, яке здатне завдавати перешкоди іншим працюючим вимірювальним приладам. Уся множина наявних в системі мікропроцесорних вузлів 6 з необхідною кількістю швидкодіючих давачів 1 утворюють дві окремі, але подібні за структурою та складені з однакових компонентів інформаційно-вимірювальні підсистеми, які на фіг. 2 кожна відповідно окреслена умовним графічним усіченим конусом із позиційними позначеннями 7 або 8. При цьому мікропроцесорні вузли 6, як це є у прототипі, у кожній з підсистем розподілені на трьох функціональних рівнях так, що на вищому рівні існує лише один кластер, який об'єднує відповідні три мікропроцесорних вузли 6 в окрему функціональну структуру - кластер верхнього рівня (Фіг. 1). Кластери, складені із інших трьох мікропроцесорних вузлів 6, що існують на нижчому функціональному рівні є приєднаними лише до одного відповідного до них мікропроцесорного вузла у кластері на вищому рівні шляхом з'єднанням трьох інтерфейсних пристроїв 4 каналами 9 міжвузлових зв'язків з одним мікропроцесорним вузлом 6 на рівні, вищому за попередній. При описаній формі з'єднання канали 9 міжвузлових зв'язків логічно приєднали ці мікропроцесорні вузли 6 між собою за принципом "точка-точка" та забезпечили трансляцію усіх даних, отриманих від давачів 1, приналежних будь-якому з мікропроцесорних вузлів кластера на нижчому рівні (тепер вже у формі цифрових кодів) до відповідного мікропроцесорного вузла 6 на вищому рівні (Фіг. 1), а також надали постійний інформаційний зв'язок між іншими мікропроцесорними вузлами 6 транслюванням інших цифрових кодів через один безпосередній шлях та при необхідності через чотири різні альтернативні шляхи. Як і в прототипі, іншими каналами 10 міжвузлових зв'язків (Фіг. 1 та фіг. 2) з'єднано мікропроцесорні вузли 6 суміжних кластерів, приналежних одному логічному рівню, в одне угрупування, що назване "домен" відповідного рівня. При цьому з'єднання каналами 5 та 10 міжвузлових зв'язків виконано так, що вони підключені послідовно по черзі. Тоді на кінцевому 14 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 кроці вказаної форми підключення стає утвореним постійно існуючий спільний для трьох кластерів кільцевий шлях з шести каналів (5, 10, 5, 10, 5, 10) міжвузлових зв'язків для передавання цифрових кодів між будь-якою парою мікропроцесорних вузлів 6 цього домена завдяки трансляції даних вузлами-посередниками із числа задіяних в кожному із з'єднаних кластерів. У будь-якій із двох інформаційно-вимірювальних підсистем з ознаками прототипу, яка і є переважно використаною для побудови підсистем 7 та 8 (Фіг. 2), за допомогою діагональних міжрівневих каналів 11 міжвузлових зв'язків з'єднано три мікропроцесорні вузли 6 кластерів одного із доменів на нижчому функціональному рівні, які ще не були задіяні в формуванні кільцевого шляху за допомогою каналів 5 та 10, з трьома мікропроцесорними вузлами 6 одного кластера вищого рівня. Так забезпечено форму з'єднання, що гарантує постійне існування альтернативних шляхів для передавання цифрових кодів в кожній з підсистем 7 та 8 в разі будьякого технічного чи аварійного виключення із числа наявних навіть кількох суміжних мікропроцесорних вузлів 6 з множини приналежних до цієї групи. У підсистемах 7 та 8 на їх верхньому функціональному рівні є разом утвореними два кластери із мікропроцесорних вузлів 6, і вони мають надійний та досконалий по продуктивності інформаційний зв'язок із будь-яким зі своїх суміжних мікропроцесорних вузлів 6 на кожному з нижніх функціональних рівнів цих підсистем. При можливому при експлуатації в несприятливих умовах "найтяжчому" одночасному блокуванні (чи навіть руйнуванні) від п'яти до семи з багатьох існуючих в конструкції каналів 5, 9, 10 чи 11, що у будь-який час діють як альтернативні для динамічного формування шляхів у міжвузлових зв'язках, частковий потік даних в межах підсистем 7 та 8 між усіма адресованими мікропроцесорними вузлами 6 все ж завжди існує як нерозривний. Тобто в конструкції кожної з підсистем досягнуто апаратними засобами і реалізовано в кожному часовому перерізі загальну нерозривність блоків даних у потоці вимірювальної інформації, яка виникає на нижчих рівнях від усіх давачів, при передаванні її в напрямку до верхніх функціональних рівнів. Зв'язок між самими підсистемами 7 та 8, який відповідає належній високій якості та стійкості до руйнівних дій, виконано як закономірне активне резервування додаткових каналів передачі даних і включення нових мікропроцесорних вузлів, що було зроблено у прототипі. За допомогою додаткових мікропроцесорних вузлів 12 тут утворено спільний супервізорний кластер (Фіг. 2), підключений каналами міжвузлових зв'язків одночасно до двох наявних кластерів верхнього рівня обох підсистем 7 та 8. Канали 13 міжвузлових зв'язків підключені з обох кінців тільки до кожного з мікропроцесорних вузлів 12 за принципом "точка-точка" і забезпечують трансляцію цифрових кодів між будь-якою парою з них незалежно від стану третього мікропроцесорного вузла 12 цього супервізорного кластера так само, як це передбачено у будь-якому з кластерів, складених із мікропроцесорних вузлів 6. Кожний з мікропроцесорних вузлів 6 кластерів верхнього рівня підсистем 7 та 8 підключено до суміжних з ними мікропроцесорних вузлів 12 кластера супервізорного рівня за допомогою прямих каналів 14 та діагональних каналів 15 міжвузлових зв'язків. Цим у спільній для двох підсистем зоні (верхня частина зображення на фіг. 2) комплексної інформаційно-вимірювальної системи як у гіперсистеми утворено шість за своєю логічною структурою замкнених "кільцевих" (трикутних) шляхів для передавання даних, які послідовно включають канали 13, 14 та 15 міжвузлових зв'язків. Вони сполучили мікропроцесорні вузли 6 через посередництво мікропроцесорних вузлів 12 так, що завжди забезпечено постійно існуючі шляхи просування та реплікації цифрових кодів в будь-якому напрямку практично незалежно від реального стану дієздатності окремих каналів чи мікропроцесорних вузлів, що існують в їх оточені. При цьому інформаційний зв'язок є нерозривним, коли навіть два із загального числа каналів 5, 13, 14 чи 15 міжвузлових зв'язків або мікропроцесорних вузлів 6 та 12 в поточну миттєвість можуть бути визнаними як такі, є функціонально непрацездатні ("заблоковані"), або вони знаходяться в неробочому стані через технічну нездатність передавати сигнали, чи взагалі були відімкненими та логічно виключені із складу наявних у цій конструкції (наприклад, для термінового відновлювального ремонту). Мікропроцесорні вузли 12 супервізорного кластера безпосередньо фізично не взаємодіють ні з самими перетворювачами та давачами, ні тим більше з їх сенсорними частинами. Натомість вони постійно є сполученими з ними логічно через потік канальних інформаційних сигналів, а це виконано так, що будь-який первинний аналоговий сигнал у його цифровому відображенні є досяжним для аналізу через його цілеспрямовану реплікацію в запам'ятовуючих пристроях у проміжних мікропроцесорних вузлах 6 на шляху передавання цих копій на всіх відповідних функціональних рівнях будь-якої з двох підсистем. 15 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 В запропонованій інформаційно-вимірювальній системі формуючі каскади давачів 1 як продовження їх сенсорних частин підключені до відповідних перетворювачів 2 через посередництво зібраних у спеціалізовані джгути 16 гальванічних дротових або ж безметалевих оптичних ліній передавання аналогових сигналів (показано хвилястою лінією на фіг. 1 та фіг. 2). Коли давачем виступає фактично обособлена та віддалена тільки сама сенсорна частина як окрема вкрай спрощена конструкція без інших засобів формування проміжного сигналу, то через відповідний джгут 16 ліній передавання аналогових сигналів вона є підключеною до перетворювача як повністю закінчений вузол. Використана для цього технологія та відповідні конструктивні елементи виконані за відповідними відомими технічними рішеннями для якісної передачі змінюваних в часі значень вимірюваних аналогових величин на відстань від одного чи двох десятків сантиметрів до приблизно одного метра в напрямку точок безпосереднього отримання первинних даних в аналоговій формі за умов, що цими конструкціями також забезпечено можливість самим сенсорам таких давачів бути вільно переміщуваними у геометричному просторі по відношенню до досліджуваного об'єкта або змінити їх розташування рухаючись разом із окремими блоками будь-якої іншої допоміжної частинами конструкції, що слугує для запобігання механічного руйнування від випадкового зіткнення з перешкодою на самому об'єкті. До мікропроцесорних вузлів 6 на найнижчому функціональному рівні в запропонованій конструкції інформаційно-вимірювальної системи підключені давачі із сенсорами, що орієнтовані на сприйняття в формі аналогових сигналів від зовнішніх джерел коливання змінюваного електроструму, де такі зміни виявлено через подовжений у часі вимір поточної різниці потенціалів, що виникають на кожній парі гальванічних електродів, з'єднаних безпосередньо з об'єктом дослідження, який переважно проявляє властивості провідного середовища з активним опором. Гальванічні електроди 17 та 18 - це загострені деталі (на фіг. 3 вони умовно виглядають як конуси), що їх механічно жорстко приєднано до кінцевих частин двох окремих діелектричних стрижнів 19 та 20, які є складовими нижньої частини спеціально створеної для узгодженої роботи в геометричному просторі всіх давачів гнучкої функціонально орієнтованої механічної несучої конструкції із стрижнів, важелів і шарнірів, з якою асоційовано відповідні електротехнічні та електронні компоненти інформаційно-вимірювальної системи. Тут під асоціацією у відповідності із відомим загальним значенням терміну прийнято таку форму об'єднання, при якій створено єдине функціонально нерозривне угрупування частин. Гальванічні електроди 17 та 18 у робочому режимі щільно і з певним зусиллям є притиснутими до твердої поверхні у точках дотику на об'єкті в області дослідження (на фіг. 3 ці місця окреслені умовними колами). До одного із стрижнів з гальванічним електродом також прикріплено модуль 21 із сенсорними елементами давачів, які здатні сприймати акустичні коливання як механічні хвилі стискання в пружному середовищі. Такі акустичні коливання діють на глибині досліджуваного об'єкта (у ґрунті) та досягають його поверхні, а потім без значних втрат енергії і викривлень форм вже у вигляді отриманих сигналів завдяки гарним пружним якостям матеріалу стрижня 19 (наприклад, щільної кераміки) стають надісланими до сенсора через передбачений для цього надійний акустичний контакт із твердою поверхнею. У модулі 21 механічні коливання вже діють як перетворювані у первинний системний аналоговий електричний сигнал. Таке досягнуто завдяки тому, що стрижні 19, 20 із приєднаними до них жорстко гальванічними електродами 17, 18 та сенсорними елементами у модулі 21 акустичного давача закріплені кожний окремо і переважно перпендикулярно їх осям на кінцевих частинах двох різних важелів 22 і 23, які теж своїми протилежними закінченнями вмонтовано перпендикулярно (вздовж радіуса) до циліндричних поверхонь дисків 24 та 25, скріплених між собою рухомо обертально як у втулках на центральній осі 26, що є зорієнтованою переважно паралельно до площини тієї частини поверхні досліджуваного об'єкта, де передбачено виконання поточних вимірів. На фіг. 3 центральна вісь 26 показана тільки як її кінцева частина, що вийшла назовні у центрі диска 25 (в зоні отвору біля втулки). Диски 24 та 25 разом із важелями 22 та 23 виконані взаємно рухомими навколо центральної осі 26 так, що за певних умов ці важелі із їх схрещеними осями можуть утворювати у фронтальній проекції одну пряму, коли вони є розгорнутими на близький до максимального (180°) допустимий кут для вільного зрушення до упорів. При цьому стрижні 19 та 20 разом із гальванічними електродами 17 та 18 є орієнтованими по лініях, що у місцях їх дотику є близькими до вертикалей відносно частин площини поверхні досліджуваного об'єкта. Електричний контакт електродів 17, 18 з поверхнею у точках дотику, а також акустичний контакт сенсорів модуля 21 акустичних давачів є контрольованим шляхом виміру поточного зусилля, з яким виконано притискання стрижнів 19, 20 до поверхні досліджуваного об'єкта. 16 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 Відповідний динамометричний давач побудовано за відомим принципом із використанням гнучкого пружного елемента 27 (наприклад, спіральної пружини), кут 28 закручування якого при обертальних переміщуваннях стрижнів з важелями навколо осі є пропорційним прикладеному зусиллю, яке стає необхідним для надійного електричного з'єднання електродів 17, 18 з об'єктом у точках дотику та забезпечення досконалого акустичного контакту двох суміжних твердих звукопровідних матеріалів: стрижня 19 і самої поверхні об'єкта дослідження (переважно затверділої маси та камінців із ґрунтом). Вимірювання величини кута 28 обертального зміщування відносного дисків 24, 25 із важелями 22, 23 взагалі може бути виконано у різний спосіб будь-яким із численних відомих пристроїв для перетворення просторової аналогової кутової величини у пропорційний електричний сигнал. В запропонованій інформаційно-вимірювальній системі для збереження технологічної єдності у всьому комплексі електромеханічних пристроїв використано конденсаторний тип базового сенсора як єдиний загальний елемент аналогової частини такого давача, що цілком задовольняє особливостям запропонованого технічного рішення через принципову можливість інтегрування його оболонково-поверхневих компонентів як виконаних специфічних кінцевих фігурних місцевих обробок, наприклад, нанесення провідних покриттів, цілеспрямовано сформованих безпосередньо на частині окремих суміжних деталей функціонально орієнтованої гнучкої механічної несучої конструкції як структурної одиниці системи. Для точного визначення можливих малих механічних зрушень під час вимірювань різниці потенціалів між електродами 17 та 18 при оцінюванні змін кута обертання важелів 22, 23 використано спеціально приєднаний до дисків 24 та 25 конденсаторний сенсор, який складено із двох ізольованих один від одного сегментів 29 та 30 із провідного покриття, яке для кожного із цих сегментів непорушно механічно скріплено безпосередньо із дисками. Обертанням цих дисків важелі 22, 23 в їх робочому (середньому) положенні розгорнуті до стану, при якому вони на 15…25 кутових градусів не доходять до рівня отримання у проекції майже прямої лінії, а тоді сегменти 29 та 30 перекривають одне одного приблизно на 75 відсотків від максимальної площі їх накладених площин. Кутові зміщення важелів 22, 23 через протилежне обертання дисків 24, 25 безумовно призводять до збільшення (кут 28 збільшується) чи зменшення (коли кут 28 зменшується) у площі взаємного перекриття провідних покриттів сегментів 29 та 30 (показано на фіг. 3 зліва внизу) і, як наслідок, до відповідної зміни величини конструктивної електричної ємності, що виникає в цьому вбудованому разом із елементами механічної конструкції інтегрованому конденсаторі. Особливістю конструктивної реалізації такого сенсора в давачі змін кута є також підключення однієї з інтегрованих обкладинок через посередництво, наприклад, контакту тертя із ізольованим кільцеподібним сегментом 31, через який виконано замикання ("закорочування") обкладинок вбудованого вимірювального конденсатора сенсора, що в цьому режимі перетворює його на резистор до кількох омів, коли важелі 22, 23 знаходяться в неробочому положенні і є зведеними із мінімальним кутом 28 через відсутнє або недостатнє зусилля притискання стрижнів 19, 20 до поверхні, а тому і непридатність для вимірювань такого електричного та акустичного контактів з поверхнею об'єкта. Провідні сегменти 29 та 30 нанесені переважно на тонкі діелектричні керамічні чи емальовані внутрішні диски 32 та 33 або як багатошарові наплавлення, що зберігають механічну єдність у конструкції на осі 26, але відділяють ці сегменти (ізолюють їх електрично) від матеріалу дисків 24 і 25, залишаючи постійним досконалий механічний зв'язок із їх рухами. Проміжок між провідними сегментами 29 та 30, що виступають обкладинками конденсатора змінюваної ємності, заповнено переважно плівковим шаром діелектрика із високими радіотехнічними властивостями і стабільними механічними якостями щодо стійкості до руйнування тертям або ж деформацій в разі розігріву чи переохолодження, наприклад, фторопластом (тефлоном). Вся описана група частин у конструкції сенсорів разом із іншими деталями давачі в для вимірювань різниці потенціалів, рівня коливань в акустичному полі на поверхні об'єкта та зусилля притискання стрижнів 19, 20 для контактування через електроди 17, 18, що на їх кінцях, об'єднана переважно в одному закінченому блоці в межах гнучкої функціонально орієнтованої механічної несучої конструкції. Сам такий блок закріплено переважно як окреме утворення на прикінцевій частині консольного важеля 34. Тільки як приклад варіанту конструктивного втілення такого кріплення до важеля 34 на фіг. 3 показано охоплення загальною скобою із опорами у підшипниках на осі 26 дисків 24, 25, де є інтегрованими з цими дисками елементи конденсаторного сенсора. 17 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 Інший передбачений в запропонованій конструкції сенсор 35, що с чутливим до найменших змін у напруженості локального магнітного поля, і через це його включено до складу давача магнітометра, приєднано жорстко до важеля 34, наприклад, через посередництво відгалуження 36 як невеликої консольної балки, що в робочому положенні розташована практично паралельно площині поверхні досліджуваного об'єкта. Такою просторовою орієнтацією забезпечено постійний контроль через покази у вимірах динамометричного кутового давача за фактично отриманим реальним поточним положенням балки відгалуження 36 та приєднаного до нього сенсора 35 давача магнітометра відносно досліджуваної поверхні. В запропонованій конструкції стає досягнутим те, що у геометричному просторі кожного разу в робочому положенні для виконання вимірів характеристик зовнішнього поля біля об'єкта магніточутливий сенсор 35 давача є однаково зорієнтованим і закріпленим у безпосередньому наближенні до досліджуваної поверхні, і ця дистанція є завжди відомою за виміром отриманого зазору від нижньої кромки корпусу самого сенсора до суміжної поверхні ділянки досліджуваного об'єкта через визначення зусилля притискання важелів 19, 20, яке спонукає хоча б мінімальне занурення гальванічних контактів 17 та 18. Важіль 34 своїм іншим закінченням, що є протилежним до місця встановлення блоку із сегментами провідних поверхонь 29, 30 та пружного елемента 27 сенсора динамометричного кутового давача, приєднано жорстко до повзуна 37, виконаного охоплюючим та насадженим рухомо на важіль 38 кожної опори гнучкої функціонально орієнтованої механічної несучої конструкції. Зусилля, з яким повзун 37 через посередництво важеля 34 в робочому стані притиснув увесь блок, складений із важелів 22, 23 і стрижнів 19, 20, та де його нижніми закінченнями є гальванічні електроди 17 та 18, до поверхні досліджуваного об'єкта, контрольоване через вимірювання відомим методом поточного величини лінійного зрушення (вертикального ходу) при стисканні пружного елемента, наприклад, витої циліндричної пружини 39. Така пружна, навита як циліндричний елемент, що охоплює своїми витками важіль 38. Її верхню частину укріплено в одній точці на тілі самого важеля опори, а протилежна нижня частина цієї ж пружини 39 з'єднана з повзуном 37 так, що у робочому положенні важеля 38 вона натискає із зусиллям зверху на повзун 37, а в будь-якому іншому її розтягнутому стані, навпаки, утримує повзун 37 від його подальшого зрушення до низу під дією сили ваги цього утворення за межі наперед встановленої конструктивно крайньої нижньої позиції. Сенсор величини лінійного переміщення повзуна 37 як втулки відносно важеля 38 також може бути побудованим за будь-яким відомим принципом. В запропонованому варіанті гнучкої функціонально орієнтованої механічної несучої конструкції інформаційно-вимірювальної системи як найбільш відповідний в плані єдності технології виготовлення усієї системи використано інтегрований із механічними частини важеля та втулки свій конденсаторний сенсор їх взаємного повздовжнього переміщення і подібний за формою реалізації до сенсорної частини динамометричного давача відносного кутового зміщення важелів 22 та 23, але в цьому випадку він є адаптованим до конструкції із суміщених рухомих циліндрів. На відміну від дводискового, такий сенсор виконано не як плаский із двома секторними провідними поверхнями, а як циліндричний конденсатор із двома обкладинками, що їх створено із провідних коаксіальних циліндричних поверхонь різного діаметра, частково перекриваючих одна одну, де на фіг. 3 їх показано спрощено у вигляді умовних циліндрів, вставлених один у другий. Вони обов'язково розділені тонким діелектричним шаром і таким засобом ізольовані електрично від інших деталей механічної конструкції. Одна із провідних поверхонь 40 закріплена так, що вона може переміщуватися як його вмонтована частина разом із повзуном 37, а друга провідна поверхня 41 є інтегрованою (закріпленою нерухомо) разом із матеріалом важеля 38 опори гнучкої функціонально орієнтованої механічної несучої конструкції. З ним у робочому положенні провідна поверхня 41 завжди є піднятою на практично постійну відстань і розташованою перпендикулярно до площини над досліджуваною ділянкою на самому об'єкті. При будь-якому зрушенні повзуна 37 відносно важеля 38 початкова площа взаємного перекриття провідних поверхонь 40 та 41 є змінюваною, що тут як для сенсора лінійного переміщення зумовлює відповідні зміни електричної ємності такого інтегрованого в конструкцію конденсатора, складеного з цих двох взаємно перекриваючих провідних поверхонь як із обкладинок. Як варіант удосконаленої конструкції такого самого за принципом, але вже виконаного як багатоканальний сенсор лінійного і можливого невеликого обертально осьового кутового зрушення, деталі якого є також інтегрованими безпосередньо в матеріалі повзуна 37 та важеля 38 опори, вказані вище обкладинки конденсаторів виконані розділеними на окремі зони загалом із декількох частин від загальних суцільних циліндричних поверхонь, що усі розташовані в 18 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 самому отворі втулки повзуна 37 та відповідно до кожної з них на зовнішній частині циліндричної поверхні важеля 38 опори. Переважно це є подовжені смужки, що спрямовані чітко вздовж спільної осі циліндрів важеля 38 опори та повзуна 37. У зібраному стані, коли повзун 37 як рухома втулка охопив частину циліндра важеля 38 опори, в робочому положенні ці провідні поверхні у вигляді смужок є частково накладеними одна на одну, але розділені діелектричною плівкою. З рухом повзуна вгору чи вниз площа взаємного перекриття їх накладених частин стає меншою чи більшою, тобто функціонально змінюваною із лінійним зрушенням, що відповідно впливає на величину конструктивної електричної ємності кожного із кількох створених таким чином інтегрованих смужкових конденсаторів. В удосконаленому багатоканальному сенсорі додану кутову чутливість до обертання навколо осі важеля 38 опори досягнуто тим, що смужки на одній із двох суміжних деталей, наприклад, на втулці у повзуні 37 розташовані із трохи більшим кроком поділу кола перерізу, ніж на важелі 38, та передбаченим значним зазором між ними на поверхні. Тоді щонайменше дві пари смужок, приналежних опорі та повзуну, у нормальному стані осьової орієнтації будуть взаємно перекриті лише частково тому, що частина матеріалу провідних поверхонь буде за краями місць перекриття у межах зазорів між смужками. При осьовому обертанні втулки із такими смужками у повзуні 37 на невеликий кут відносно аналогічних смужок на самому важелі 38 навіть без будь-якого лінійного зміщення співвідношення площ частин поверхонь, які перекриваються, буде змінено так, що менш перекриті можуть збільшити надбану частку площі перекриття, а інші навпаки її зменшити. Через зміну співвідношення відповідної конструктивної ємності таке є прямою вказівкою як на сам факт, так і на кількісний вираз у величині наявного мінімального обертального відхилення від раніше встановленої кутової орієнтації повзуна 38 на важелі 37 та значить із ним також важеля 34 і важелів 22 та 23. Можливе обертання у рухомому з'єднані під дією зовнішньої непередбачуваної сили призводить до переміщення у нове відносно програмованого положення точок дотику гальванічних електродів 17, 18 до поверхні досліджуваного об'єкта. Шляхом застосування багатоканального сенсора змінений випадковим обертанням повзуна 37 стан розташування зон для вимірів стає виявленим і чітко визначеним за отриманим чисельним співвідношенням ємностей одночасно у кількох наявних конденсаторах сенсора удосконаленої конструкції. Важіль 38 є сполученим із розташованою в його нижній частині п'ятою 42 опори гнучкої функціонально орієнтованої механічної несучої конструкції. Вказане сполучення виконано як рухоме без зазорів і зроблене переважно у вигляді сферичного (кульового) шарніра, де його сферичним сегментом (закругленням) є саме закінчення важеля 38. Відповідна сферична вибірка частини матеріалу (Фіг. 4) виконана у тілі самої п'яти 42. Для спрощення графіки на фіг. 3 та фіг. 4 не показані обов'язкові у відомих реалізаціях сферичних шарнірів елементи, що фіксують як незмінну довжину в осьовому напрямку такого рухомого механічного з'єднання, але в реальній конструкції вони безумовно присутні, як наприклад, суцільні чи розбірні накидні гайки із відповідною сферичною вибіркою з внутрішньої сторони торцевої стінки з отвором для пропуску важеля 38. На спрощеному збиральному кресленні (Фіг. 4) важіль 38 показано у трьох прямокутних проекціях разом із коромислом 43 та п'ятою 42, яка в робочому положенні підтримує оперту на неї частину маси усієї гнучкої функціонально орієнтованої механічної несучої конструкції інформаційно-вимірювальної системи, сприймаючи відповідну кінематичну реакцію від твердої поверхні досліджуваної ділянки об'єкта. На окремих проекціях креслення збиральної одиниці із важелем 38 та коромислом 43 на фіг. 4 подано їх узагальнену форму, що подібна до кириличних літер "Т" та "Г" відповідно для фронтальної та бокової площин проекцій, до якої вони переважно тяжіють, коли їх об'єднано разом, наприклад, за допомогою різьбового сполучення із фіксацією контргайкою 44 для забезпечення потрібної чіткої ортогональності осей цих деталей. На відміну від важеля 38 опори, де сферичним сегментом є тільки одне нижнє закінчення, з'єднане з ним у верхній частині коромисло 43 цієї ж опори має сферичні сегменти на обох закінченнях. Таке передбачено для того, щоб було створеним надійне рухоме прикріплення самого коромисла 43 через сферичні шарніри з обох боків одночасно та без випадково змінюваних зазорів до двох різних стрижнів 45 і 46 однієї відповідної рами гнучкої функціонально орієнтованої механічної несучої конструкції інформаційно-вимірювальної системи. Будь-який із сферичних шарнірів виконано так, що він забезпечує лише двохосьове обертання, а переміщення відносно третьої просторової осі є заблокованим, наприклад, відомим кулісним з'єднанням із виступом, який може переміщуватися лише по лінії у прорізі. На фіг. 4 для спрощення елементи такої куліси, як то виступаючий штифт у сферичному сегменті 19 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 коромисла чи важеля і відповідний за розмірами до його допустимих зміщень протяжний меридіональний виріз у сферичній втулці, тут не показані, але подібне є у реальному втіленні конструкцій цих деталей. В межах кожного із сферичних шарнірів є вбудованими в їх деталі, а саме у сферичний сегмент закінчення циліндричної частини та сферичну сегментну втулку, специфічні саме для запропонованої інформаційно-вимірювальної системи сенсори для визначення величини двохосьового кутового обертального переміщення п'яти 42 відносно важеля 38 опори, а також кожного із закінчень коромисла 43 відносно приєднаного до нього стрижня 45 чи 46, які входять до складу цієї рами. В гнучкій функціонально орієнтованій механічній несучій конструкції інформаційновимірювальної системи передбачено існування інтегрованого з деталями важелів та стрижнів сенсора двохосьового кутового переміщення, який виконано саме як конденсаторний. На відміну від описаних раніше плаского чи циліндричного одиночних конденсаторів у цьому сенсорі виконано подвійні конденсатори із чотирма задіяними сумісно провідними сферичними поверхнями, що попарно перекривають одна одну та є розділеними діелектричним плівковим шаром. Всі ці поверхні є також ізольованими електрично від елементів механічних конструкцій, але в межах їх допустимих кутових зрушень вони як інтегровані частини жорстко механічно зв'язані із відповідними деталями і переміщуються разом із ними - із сферичними сегментами коромисла 43 чи важеля 38 і суміжними сферичними втулками на закінченнях п'яти 42 та стрижнів 45, 46. У кожному сенсорі двохосьових кутових зрушень виконано з'єднані для цього в один механічний вузол фактично два ортогонально орієнтованих одноосьових конденсаторних сферичних сенсори. Кожна із двох частин складеного у таку форму сенсора має свої дві провідні поверхні, які за просторовою формою співпадають із відповідними сферичними деталями рухомих сполучень, де вони є інтегрованими у суміжних частинах поверхонь, але мають лише їх часткове відображення у кутовій розгортці, яке не перевершує однієї восьмої поверхні сфери. При цьому одна із двох провідних поверхонь 47 завжди є більшою по площі за другу поверхню 48, яка у середньому положенні деталей виконана розташованою так, що стає лише частково накладеною на місце нанесення першої (схема їх перекриття є на фіг. 4). Менша за площею сегментна сферична провідна поверхня 48 має в площинній проекції вигляд смужки 49, подовжені сторони якої є перпендикулярними до лінії границі більшої провідної поверхні 47. При такому співвідношенні форм, орієнтації та площ поверхонь при будь-яких допустимих обертаннях сферичних сегментів важелів відносно сферичних втулок зона перекриття у меншої провідної поверхні 48 по ширині не виходить за межі провідного покриття більшої поверхні 47. В середньому положенні, коли частина довжини поверхні 48 виведена за межу більшої поверхні 47, площа перекриття при взаємному накладанні провідних поверхонь встановлена такою, що дорівнює приблизно половину площі меншої (смугової) поверхні 48. Провідні поверхні на відповідних сферичних деталях орієнтовані так, що переміщення з'єднаних елементів шарніра обертально навколо осі 50 (це вертикаль на схемі рухів на фіг. 4) не змінює вказану площу перекриття як початкову. Натомість обертання деталей шарніра в другому допустимому напрямку навколо ортогональної осі 51, як наприклад, за годинниковою стрілкою призводить до зменшення зони перекриття (на фіг. 4 її показано штриховкою). Протилежний рух збільшує цю ж площу взаємного перекриття провідних поверхонь як обкладинок інтегрованого конденсатора, відповідно збільшивши його електричну ємність. На проекціях збирального креслення всієї опори функціонально орієнтованої механічної несучої конструкції (Фіг. 4) показано ортогональне розташування пар конденсаторів сенсорів на кожному закінченні важелів, але для спрощення графіки тут подано лише схему розташування провідних поверхонь 47, 48 цих сенсорів без дотримання реальних значень кутів ліній для проекцій їх границь, криволінійні контури яких можуть бути встановленими лише для закінченого в проектуванні (та виготовленні) подібної збірки як виробу, сполученого з іншими деталями. Двохосьові сенсори давачів кутів відхилення важелів 38 та коромисел 43 виконані таким чином, що вони забезпечують вимір кутів у межах всієї множини допустимих положень взаємно рухомих деталей. Кілька типових положень, як приклад, на фіг. 4 з використанням просторової моделі збірки опори для основних фаз еволюцій важеля з приєднаним до нього коромислом показані таким чином, що тут для виразності лініями означені зміни напрямків кожної осі стрижня 45 чи 46. У повністю зібраному стані гнучка функціонально орієнтована механічна несуча конструкція інформаційно-вимірювальної системи є складеною із двох трикутних рам (Фіг. 5), в яких з'єднані між собою стрижні 45 та 46, а вони сполучені в єдине ціле так, що у будь-якому з кутів у сформованої конструкції рами у вершинах вставлено шарнірні сполучення через посередництво 20 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 приєднаних сферичними втулками коромисел 43 для отримання тільки обертального рухомого кінематичного зв'язку із кожною з трьох її опор. Самі стрижні 45 та 46 виготовлені так, що кожний з них має на закінченнях, які є протилежними до сегментних сферичних втулок, окремі засоби для їх взаємної жорсткої і постійної стиковки в одну лінію. Так із них в кінцевій стадії збирання виконано одне механічно нерозривне (як суцільне) тіло, незалежно із кількох фізичних частин воно є складеним при збиранні. Для запропонованого технічного рішення таке тіло є сформованим відомим методом переважно із двох частин, скріплених жорстко між собою, наприклад, стиковим різьбовим сполученням. Воно виконано як зафіксований контргайками двогвинтовий вузол із лівою та правою нарізкою різьби і двосторонньою скріпляючою їх разом однією різьбовою втулкою. Така відома конструкція забезпечує одночасно точне осьове обертальне регулювання для фіксації ортогонального положення провідних поверхонь, що вмонтовані в їх прикінцеві сферичні втулки, а також при цьому шляхом скручування ще не зафіксованої контргайками втулки, яка по різьбі стягує стрижні 45 та 46, також і чітко визначену загальну довжину усієї лінії вздовж осі цієї збірки. В запропонованій інформаційно-вимірювальній системі розмір самої такої збірки слугує в процесі експлуатації як певна лінійна стала величина внутрішньої міри при визначенні загальної дистанції просторового переміщення. Увесь час в роботі залишаються дотриманими як початкові певні налаштування перекриття провідних поверхонь, і таким чином забезпечено нормальне функціонування конденсаторних сенсорів давачів кутів положення стрижнів обох рам при будь-яких допустимих поточних еволюціях скріплених рухомо між собою важеля 38 та коромисла 43 зібраної опори. У своїх площинних проекціях дві рами гнучкої функціонально орієнтованої механічної несучої конструкції, які складені послідовним з'єднанням стрижнів 45-46 та коромисел 43, є трикутними, де в усічених вершинах розташовані коромисла з важелями 38 опор. У тривимірному просторі стрижні 45-46 двох різних рам лежать у паралельних площинах, і при цьому "трикутники" їх проекцій є розгорнутими навколо вертикальної осі (нормалі до їх площин) на кут у 180° так, що осі всіх з'єднаних стрижнів 45-46 однієї рами виступають схрещеними прямими по відношенню до осей іншої рами (відповідне зображення у верхній частині фіг. 5). На плані (вигляд згори) лінії осей стрижнів 45-46 є у проекціях накладеними із перекриттям (для різних площин) у шістьох точках. Для збереження заданої загальної форми взаємного положення двох рам при усіх допустимих взаємних зрушеннях окремих деталей як складових гнучкої функціонально орієнтованої несучої конструкції інформаційно-вимірювальної системи переважно лише у трьох таких місцях проекційного пересічення осей стрижнів 45-46 як схрещених прямих розташовані (по черзі через одну) засоби механічного з'єднання двох рам в одну просторову ферму із її рухомими частинами. При цьому суміжні збірки стрижнів 45-46 від різних рам скріплені між собою так, що відсутні змінювані зазори в елементах з'єднання завдяки передбаченим в загальній конструкції об'єднання рам окремими стійками 52 постійної довжини, які за формою і особливостям конструктивно-технологічного виконання повністю аналогічні до коромисел 43. Кількома парами передбачених у конструкції вузла кріплення відповідних до закінчень цих стійок сегментним сферичним втулкам захватів 53 (на нижній рамі) та 54 (на верхній рамі) самі ж стійки прикріплені до стрижнів 45-46. Такі сферичні втулки захватів є за формою і технологією виконання аналогічними до з'єднуючих елементів стрижнів 45 чи 46 і суміжних до них коромисел 43 з важелями 38 опор. Ці захвати мають такі ж сферичні виїмки для механічного сполучення (Фіг. 5) і такі ж інтегровані з їх матеріалом та ізольовані електрично смужкові провідні поверхні для створення разом із сферичним закінченням кожної стійки досконалих двохосьових сенсорів кутового переміщення самої стійки 52 відносно захватів 53 та 54, які жорстко приєднані до боків відповідних стрижнів рам. Кожна з рам через стрижні 45 чи 46 з'єднана у трьох місцях із своєю платою 55 (Фіг. 6), де встановлено приладний відсік, який закрито з обох боків двома кришками 56 та 57, проникними для певної частини тих фізичних впливів, що є вимірюваними в якості досліджуваних геофізичних параметрів за допомогою засобів запропонованої інформаційно-вимірювальної системи. Але ці ж кришки виготовлено так, що вони надійно захищають наявне приладдя від деяких інших механічних, електричних, теплових та різноманітних атмосферних впливів, які можуть нести ушкодження чи бути побічними небажаними факторами. Кришки 56 та 57 є переважно різної висоти, що стає залежним від того, з якого боку - внутрішнього чи зовнішнього по відношенню до пари рам вони встановлені. Внутрішні кришки 57 мають бути менші по висоті (більш плескаті), бо виникає обмеження через зближення рам при обертаннях на стійках 52, а ці кришки саме розміщено між двома рухомими рамами. 21 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 Плата 55 приладного відсіку приєднана до усіх трьох збірок із стрижнів 45-46, які утворюють цю раму, як це показано на проекції у плані на фіг. 6. Приєднання виконано так, що плата 55 при будь-яких зрушеннях стрижнів 45-46 зберігає постійну орієнтацію та приналежність до тієї самої площини, яку у поточний момент утворюють осі стрижнів як геометричні лінії. Але це кріплення у ! той же час виконано обмежено рухомим. Так воно не створює перешкод для осьового зрушення стрижнів завдяки їх вільному руху в межах втулки 58 кронштейна 59, які разом склали вільне для зрушень тільки в осьовому напрямку з'єднання із збіркою стрижнів 45-46. Через допустиме в межах рами зовсім невелике зменшення відстані між протилежними стрижнями В місцях прикріплення плат 55 за рахунок допустимого зміщення цих стрижнів, пов'язаного із поворотом коромисла 43, з'єднання у площині кронштейна 59 та плати 55 приладного відсіку виконано рухомим в напрямку довільної лінії в цій спільній площині завдяки, наприклад, зазору в отворі для штифта 60. Сила тертя для фіксації і запобігання зайвих коливань при цьому вимушеному додатковому зрушенні деталей обумовлена переважно нормованим тиском пружини на пласку шайбу, що перекриває збільшений отвір у кронштейні 59 для пропуску в ньому циліндричного штифта 60. У кожному з'єднанні стрижнів 45-46 із втулками 58 кронштейнів 59 інтегровано провідні поверхні 61 та 62 як обкладинки конденсаторного сенсора їх лінійного зміщення, що за своєю конструктивною реалізацією цілком аналогічні до таких, які виконані у з'єднанні повзуна 37 та важеля 38. Ці провідні поверхні обкладинок конденсатора сенсора розділені твердим діелектричним матеріалом, який заповнює найбільшу частину зазору між втулкою та стрижнем. При цьому при сталій діелектричній властивості матеріалу у зазорі поточну величину електричної ємності такого вбудованого у конструкцію вимірювального конденсатора обумовлено тільки змінюваною довжиною зони 63 перекриття інтегрованих у стрижень та втулку провідних поверхонь обох обкладинок (на фіг. 6 вона показана заштрихованою). У запропонованій технічній реалізації елементів інформаційно-вимірювальної системи підключення конденсаторних сенсорів відповідних давачів просторових переміщень виконано переважно за принципом, який покладено в основу відомої однопровідної схеми. Це суттєво спрощує реалізацію електричних комунікацій, а у багатьох місцях надає можливість згрупувати, наприклад, окремі екрановані однодротові електричні кабелі у джгути, де самі їх екранні оболонки є іншим спільним для усіх пристроїв другим проводом електричного кола, який постає підключеним до загального (нульового) терміналу для кожного з блоків пристроїв, а його переважно з'єднано із усіма корпусними елементами конструкції ("заземлено"). Кожний єдиний для сенсора давача лінійного зрушення сигнальний провід з відповідними закінченнями 64 з'єднав провідну поверхню 62 обкладинки вимірювального конденсатора як сенсора із входом генератора 65, який є іншою наступною частиною в каскаді функціональних блоків цього давача. За певних сталих умов залежно від конструкції електронного генератора 65 частота гармонійних коливань, або період повторення імпульсів, або ж довжина самих імпульсів, що виникають на виході цього генератора, який виконано за відповідним відомим схемотехнічним рішенням, постає визначальною (переважно головною) функцією, де аргументом є зміна електричної ємності його хронуючого конденсатора. Обкладинка конденсатора сенсора з провідною поверхнею 61, а також нульовий вхідний та вихідний проводи 66, що на фіг. 6 показані як сам екрануючий корпус та зовнішні оболонки його коаксіальних роз'ємів у генератора 65, усі вони виступають загальними схемними електричними лініями для всього пристрою і "заземлені". Кабелі із екрануючою оболонкою виконано приєднаними на їх закінченнях за допомогою, наприклад, мініатюрних коаксіальних роз'ємів 64 та 67 для сигнальних проводів, що сформовані відповідно на вході та виході самого модуля генератора 65 (зображення функціональної схеми підключення обкладинок на правій частині фіг. 6). Кінематичні опори двох трикутних рам, що є кожна складеною із п'яти 42 та шарнірно сполученого з нею важеля 38 із коромислом 43, завдяки особливостям запропонованої конструкції виконані так, що вони можуть здійснювати досконалий механічний контакт з площиною на ділянці та отримувати опорну реакцію, наприклад, як від рослинної підстилки, так і від ґрунту при різноманітних відносних просторових положеннях, але все ж зрушення є вкладеними у межі допустимих кутів обертання навколо двох осей для кожного такого сполучення. При цьому загальним допустимим вільним рухом, що його може бути здійснено сумісно всіма частинами гнучкої несучої конструкції, є тривимірне переміщення, де завжди повністю забезпечено досконале вимірювання кутових величин обертання навколо усіх трьох просторових осей, що є паралельними прямими до ліній, які загалом визначені ортогональними утворюючими осями простору X-Y-Z, що мають спільну точку в умовному центрі ферми із обох трикутних рам. 22 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 Стійки 52 разом із сферичними втулками захватів 53 та 54 у зібраному вигляді забезпечили такий стан відносного розташування двох рам, при якому радіальна відстань між рамами ніколи не перевищує довжини, що визначена лінійним розміром цієї стійки 52, а сам кут їх розвороту обумовлений тільки конструктивним обмеженням для обертальних рухів у сферичних парах, складених із закінчень стійки 52 та захватів 53 і 54. На схемі таких рухів для стійки 52 (права частина фіг. 7) лінійним ходом в обидва боки на величину вільного зрушення 68 вправо чи вліво забезпечено взаємне обертання трикутних рам навколо їх спільної вертикальної осі, означеної лінією, паралельною до утворюючої простору Z. Завдяки цьому одна з п'ят 42 опори, наприклад, верхньої рами (на проекції в плані фіг. 7 ці важелі 38 виділено потовщеною лінією), виконавши своє зрушення проти годинникової стрілки, перейшла із позиції 69 у позицію 70. В інший часовий інтервал, коли подібний обертальний рух було виконано, наприклад, тільки із нижньою трикутною рамою у напрямку за годинною стрілкою, разом із важелем 38 її п'ята 42 опори перейшла із позиції 71 у позицію 72. Одночасно подібні зрушення виконали також інші п'яти та важелі опор рам, але тільки за умов, що коромисла 43 тут увесь час зберігали свої раніше зафіксовані напрямки попередньої орієнтації їх осей. В запропонованій інформаційно-вимірювальній системі також забезпечено передбачене виконання зрушень, коли коромисла 43, у свою чергу, стають контрольовано розгорнутими самостійно, утворивши певний новий кут із лініями їх осей, які були визначені для орієнтації, характерної для попереднього стану. Наприклад, через нове зрушення сферичні закінчення важелів 38 зайняли позицію або 73, або ж 74 залежно від напрямку їх розвороту: виконано рух проти чи за годинниковою стрілкою. Таке зрушення цієї деталі на проекції в плані визначено як можливий і допустимий лінійний хід 75 у будь-якої вершинної частини для самої рами вліво чи вправо відносно її центральної позиції 69 в разі, якщо в цей час п'ята 42 тут є опертою на ґрунт і цим встановлено її незмінне положення на ділянці. Там, де на кресленні фіг. 7 є бокова проекція, показано, що обидві рами із своїми платами 55 (а вони несуть кожна окремий приладний відсік, і тут пунктирною лінією надані контури їх кришок 56), розташовані в площинах, які є завжди паралельні одна до другої, а також разом вони переважно паралельні до поверхні ділянки досліджуваного об'єкта, коли вона у цій локації визначена як горизонтальна. В такому стані всі п'яти 42 силою ваги всієї маси гнучкої функціонально орієнтованої несучої конструкції, що тут виступає механічною просторовою фермою, притиснуті до тих місць, де виникають реальні кінематичні реакції для кожної опори з боку твердої поверхні об'єкта дослідження. В ідеалізованому випадку ці реакції розподілені рівномірно та дорівнюють кожна одній шостій загальної сили ваги маси усієї ферми. Відповідно до такого розрахункового зусилля є стиснутим завдяки зрушенню повзунів 37 кожний скріплений з ним пружний елемент 39 (вита циліндрична пружина) динамометричного давача, у якого конденсаторна обкладинка 40 сенсора інтегрована із самим матеріалом цього повзуна, що є його втулкою. При розміщенні на рівній горизонтальній ділянці (Фіг. 7) кути обертання навколо своєї осі для кожного з них в усіх коромислах 43 у цьому положенні є однаковими, і саме вони дорівнюють величіні, що вибрана як початкова чи нульова для середнього значення змінюваного кута. Таке співвідношення усіх кутів (їх рівність та близьке до нульового значення) чітко вказує на горизонтальність положення як самих плат 55 із їх приладними відсіками, так найбільше наближення до стану вертикалей осей у подовжених частин самих важелів 38. Для іншого випадку, коли всім кутам обертання навколо своєї осі для коромисел 43 лише тільки у однієї, наприклад, верхньої рами одночасно надано достатньо велике позитивне прирощення (обертання проти годинникової стрілки), усі відповідні подовжені частини важелів 38 цих опор є введеними у нахилене назовні положення, а їх п'яти 42 через це є піднятими і втратили контакт із площинною ділянкою досліджуваного об'єкта. При цьому вся вага від маси конструкції ферми стала розподіленою між трьома опорами тільки нижньої трикутної рами. Такий стан існує, коли опори верхньої трикутної рами із важелями 38, коромислами 43 і стійками 52 стали дійсно вільними для зрушень, і за цієї умови забезпечена можливість для інших керованих допустимих кутових переміщень в разі дії на відповідні деталі контрольованої зовнішньої сили. Про виникнення стану, при якому кожна з опор стає вільною для подальших її зрушень, свідчить відносне положення провідних поверхонь 40 та 41, що створюють вимірювальний конденсатор сенсора динамометричного давача, який є встановленим безпосередньо на важелі 38 кожної опори. В цьому стані вагою частини деталей гнучкої несучої конструкції зміщено повзун 37 у крайнє нижнє положення, а дією зусилля пружного елемента 39 зона перекриття цих провідних поверхонь стає мінімальною, і через таке стає найменшою і ємність сформованого з них конденсатора. Він же виступає хронуючим у відповідному генераторі 65, і 23 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 величина саме цього конденсатора задає як найвище із усіх можливих сформованих на виході 67 величин поточне значення змінюваної частоти гармонійних коливань. В стані, набутому за вказаним вище шляхом, верхня трикутна рама під дією будь-якої керуючої зовнішньої сили допускає її введення в нову форму орієнтації відносно попередніх точок дотику опор (п'ят 42) на ділянці поверхні досліджуваного об'єкта. Така нова орієнтація є досягнутою або лінійним зміщування геометричного центру (рами цілком) назад, вперед чи по сторонам у площині, яка є паралельною до площини ділянки, або ж тільки поворотом саме цієї рами навколо її сталої центральної осі, коли стає доконаним фактом стан переміщення п'яти 42 із позиції 69 у позицію 70, де таке як приклад показано на проекції у плані на фіг. 7. При цьому разом із однією із рам, (наприклад, нижньою на фіг. 5), коли для опор аналогічної верхньої рами шляхом обертання навколо осей коромисел 43 всі важелі 38 є піднятими, а п'яти 42 не контактують із поверхнею, за умови утримання однакових кутів обертання у всіх шарнірах стійок 52, стає завжди збереженою орієнтація нахилу, що подібна до орієнтації площини нижньої рами, а та, у свою чергу, є утриманою паралельною до площинної ділянки досліджуваної поверхні, умовно спрямленої як горизонтальна по точках дотику контактуючих п'ят 42 (Фіг. 7). При повторенні аналогічної операції переміщення із іншою рамою в межах цієї ферми, коли опори, наприклад, вже нижньої рами виведені із стану контакту з ділянкою досліджуваного об'єкта, нове розташування площини верхньої рами повторить орієнтацію у просторі відповідно до приведеної площини частини цієї ділянки, але вже із опорами, що будуть в такому разі встановленими в нових позиціях і введеними в контакт в інших передбачених програмою зрушень точках поверхні досліджуваного об'єкта. На відміну від стану, який ілюструє розташування рами на фіг. 7, в аналогічних проекціях на фіг. 8 так само показано розташування в просторі змінюваних у своїй орієнтації вузлів, з'єднаних з верхньою трикутною рамою гнучкої функціонально орієнтованої механічної несучої конструкції, коли частиною досліджуваного об'єкта постає ділянка, що нахилена відносно горизонту, а її поверхня має помітні нерівності. Саме пересіченість профілю найчастіше відповідає ситуації реальних вимірювань. Навіть за таких умов трикутні рами разом є завжди утриманими так, що вони кожного разу при виконанні послідовних зрушень розташовані горизонтально. Це досягнуто завдяки тому, що три важелі 38 опор верхньої рами, які у цьому прикладі введені в контакт з поверхнею ділянки (опори нижньої рами умовно виведені з такого контакту), розгорнуті взагалі під різними кутами шляхом обертання навколо кожної своєї осі коромисел 43. Показані на кресленні поточні величини 76, 77, а також 78, 79 кутів для повороту коромисел 43 навколо цих осей, якими є їх вигляди відповідно на фронтальній та боковій площинах прямокутних проекцій (Фіг. 8), коли ці кути відраховані від ліній у горизонтальній площині, за відомими методиками розрахунків через тригонометричні функції для геометричних трикутників, побудованих із осей відповідних деталей з урахуванням постійних величин конструктивної довжини елементів важелів 38, чітко визначили фактичні координати у просторі X-Y-Z, наприклад, позицій 80, 81 та 82 (на проекції в плані ділянки для вигляду зверху). Через набуте знання таких позицій також є безумовно визначеним кожне поточне розташування усіх інших елементів гнучкої функціонально орієнтованої несучої конструкції як вузлів ферми, а головне це реальні координати місць закріплення сенсорів давачів і суміжних зон поверхні об'єкта дослідження. В точках дотику опор в умовах експлуатації виникають відхилення від спрямування площини ділянки досліджуваного об'єкта в місці контакту з опорною поверхнею п'яти 42, що обумовлені локальною нерівністю (виступом або впадиною), через які актуальний місцевий нахил площини самої п'яти 42 не співпадає із загальним нахилом ділянки. Схема кутів обертання навколо осей для п'яти 42 подана на фіг. 8. Тут кути розвороту п'яти 42 відносно осі 83 важеля 38 та дотичної лінії 84, що зареєстровано в місці контакту, обумовили відхилення від умовного нульового значення цих кутів на величини 85 та 86 відповідно. Ці відхилення є сприйнятими кутовими давачами і кількісно визначені їх двохосьовими сенсорами, обкладинки конденсаторів яких є інтегрованими з деталями сферичного закінчення важеля 38 та п'яти 42. У робочому положенні вузлів та деталей рам, які можуть бути вільно зрушеними завдяки їх закріпленню у двохосьових шарнірах, постає необхідною досконала фіксація надбаного просторового стану як протидія силам, що існують реально і постійно через компенсації реакцій в опорах завжди існуючої сили ваги усієї маси механічної несучої конструкції разом із змонтованими на її платах 55 різними функціональними приладами для сприйняття і вимірювання впливу факторів оточуючого середовища. Такий просторовий робочий стан є дійсно зафіксованим в запропоновані конструкції ферми та важелів для усіх вузлів протягом визначеного періоду, але і він також має періодично змінювані характеристики завдяки 24 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 60 повсякчасній адаптації рухомих частин самої гнучкої функціонально орієнтованої несучої конструкції інформаційно-вимірювальної системи як органічної складової усього цього вимірювального комплексу до реального нахилу та існуючих нерівностей місцевого профілю із підйомом чи зниженням точок дотику у просторі поверхні досліджуваної ділянки та за умови обов'язкового збереження горизонтального положення для площин обох трикутних рам і скріплених з ними плат 55. Згідно із запропонованим технічним рішенням потрібна фіксація поточних просторових положень рухомих деталей та вузлів виконана шляхом контрольованої зміни довжини двоходових циліндрично-штокових телескопічних штанг, які у визначених місцях з'єднали між собою окремі важелі та стрижні гнучкої функціонально орієнтованої несучої конструкції інформаційно-вимірювальної системи і таким чином стали замикаючою ланкою у відповідних просторових кінематичних трикутниках, де два інші розміри ліній до місць обертання в шарнірах визначені самою конструкцією сполучених деталей та є сталими величинами. Кожна з таких штанг має циліндр 87 (Фіг. 9) та шток 88, який приєднано до нього рухомо так, що певна частина цього штока 88 завжди заходиться у межах внутрішньої порожнини циліндра 87. Єдність осі циліндра 87 та штока 88 забезпечена центральною втулкою 89, через яку шток 88 проведено у вказану внутрішню порожнину циліндра 87. У цій частині внутрішньої порожнини шток 88 жорстко скріплено із диском 90, площина якого є перпендикулярною до утворюючої лінії циліндричної поверхні циліндра 87. Діаметр диска 90 є трохи меншим за внутрішній діаметр циліндра, що дозволяє диска зі штоком бути легко зміщеними практично на всю довжину стінки циліндра 87. З двох боків від диска 90 між фланцями 91 та 92 циліндра утворено дві робочі порожнини, геометричний обсяг яких є змінюваним за розміром у протилежні боки, коли шток 88 із диском 90 зрушено в будь-якому напрямку. Ці порожнини заповнені речовиною у рухомому стані, наприклад, оливоподібною рідиною або інертною газовою сумішшю (можливо також атмосферним повітрям). По обидва боки від диска 90 речовина у рухомому стані є розміщеною у двох парах тонкостінних еластичних герметичних камер 93, 94 та 95, 96, виконаних, наприклад, як мішечки із стійкого до багаторазового зминання переважно синтетичного пластику (синтетичного каучуку, кремнійорганічної плівки тощо). Кожна з таких камер оснащена своїм штуцером 97, через який речовина у рухомому стані заповнює камеру, а також через який забезпечено її відтік назовні при стисканні камери переміщенням диска 90 в іншому напрямку, що є зрушеним під дією сили з боку штока 88. Речовиною в рухомому стані заповнено відповідні камери під тиском, який завжди є вищим за тиск у навколишньому середовищі. Цим забезпечено витіснення в накопичувальний резервуар зайвої речовини із камери, яка є протилежною відносно тієї сторони диска 90, де тиск з другого боку на нього є більшим. При цьому відносне положення диска 90 у самому циліндрі 87 обумовлено співвідношенням в абсолютних кількостях речовини з обох боків від диска 90 у цих робочих порожнинах циліндра 87. Таким змінюваним положенням диска 90 чітко визначено ту частину скріпленого з ним штока 88, яка стає залишеною назовні від втулки 89 фланця 92. Як наслідок, в такій конструкції зібраного вузла разом із постійним розміром утворюючої циліндра 87 це положення диска 90 точно визначає сумарне поточне значення контрольованої довжини циліндрично-штокової штанги. Ця штанга у такому її вигляді є по типу телескопічною із зануренням однієї подовженої частини в межах іншої частини конструкції, яка її охоплює з усіх боків при умові збереження спільної осі при всіх переміщеннях так, що аж до фатального руйнування не надає інших вільних напрямків для рухів із зміною довжини, окрім тільки вздовж утворюючої циліндра. Кожний трубопровід 98, через який в напрямку штуцера 97 надходить чи виходить речовина у рухомому стані, має відгалуження 99, підключене до штуцера 100 конденсаторного сенсора давача тиску у спільному трубопроводі. Цей вузол інформаційно-вимірювальної системи переважно виконаний як розташовані одна в другій дві сферичні порожнисті деталі близьких по величині діаметрів, геометричні центри яких є співпадаючими. Внутрішня сфера виконана із пружною, наприклад гофрованою, екваторіальною кільцевою вставкою, що забезпечує відносно невелике збільшення її діаметра в напрямку до плюсів (показано пунктиром), коли із середини порожнини до стінок прикладене певне зусилля. При його зменшені цей діаметр відповідно зменшується, а за відсутності зусилля конструкція повернеться точно до початкового стану. Внутрішня сфера має зовнішнє переважно суцільне провідне покриття. Зовнішня порожниста сфера 101 такого конденсаторного сенсора, що виконана із діелектричного матеріалу з високим рівнем радіотехнічних властивостей, має на полюсних частинах її зовнішньої поверхні протилежних півкуль дві зони 102 і 103. Вони завжди конструктивно відділені від провідного покриття внутрішньої сфери хоча б найменшим 25 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 гарантованим зазором з діелектричним матеріалом (електрично ізольовані). Кожна із зон 102 чи 103 вкрита своїм шаром провідного матеріалу так, що ці покриття є розділеними (ізольованими) між собою в екваторіальній частині зовнішньої сфери 101 достатньо широкою кільцевою смугою. Таке запобігає впливу змінюваного розміру самої гофрованої частини внутрішньої сфери з її провідним покриттям. За відсутністю сили, що спонукає до збільшення відстані між полюсами (у ненапруженому стані), внутрішня сфера має достатньо великий змінюваний зазор 104 між провідними поверхнями як обкладинками конденсатора сенсора давача тиску. Під тиском речовини у рухомому стані, що через штуцер 100 заповнює порожнину внутрішньої сфери, яка має суцільне зовнішнє провідне покриття, її діаметр у напрямку полюсів стає пружно збільшеним за рахунок відповідного зменшення зазору до внутрішньої стінки порожнини зовнішньої сфери. Як наслідок збільшення величини внутрішнього тиску у меншій сфері та через зміну відстані між обкладинками відбулося закономірне збільшення електричної ємності одночасно в двох конструктивних конденсаторах, які сформовано з провідних поверхонь 102 та 103, що розділені подвійним змінюваним за величиною зазором 104, який існує між провідною поверхнею меншої сфери та цими частинами як обкладинками. За еквівалентною електричною схемою це складає два з'єднаних послідовно конденсатора, ємність яких є змінюваною одночасно та за одним законом, тобто в результаті сама функціональна залежність загальної електричної ємності такої структури є однозначно залежною лише від поточного значення діаметра в районі полюсів внутрішньої сфери, а значить тільки від тиску в її порожнині. Одна з обкладинок, наприклад, 103 описаного конденсаторного сенсора з'єднана із загальними проводом системи ("заземлена"), а інша обкладинка 102 підключена переважно до сигнальної лінії і входу 64 генератора 65 у давачі тиску, що є повною аналогією із описаним раніше типом підключення обкладинки 62 сенсора лінійного зрушення, що зображений на фіг. 6. Через таке підключення частота гармонійних коливань генератора 65 с однозначно залежною від величини тиску у внутрішній сфері з провідним покриттям. В удосконаленому варіанті багатоканального сенсора давача тиску передбачено підключення до загального проводу ("заземлення") саме провідної поверхні внутрішньої порожнистої сфери, наприклад, через провідність з'єднання зі штуцером 100. Тоді два окремих конденсатора із обкладинками у вигляді провідних поверхонь 102 та 103 є хронуючими для двох незалежних генераторів 65 давачів, які для підвищення точності та надійності працюють паралельно, маючи спільним параметром тільки тиск у трубопроводі 98. Крім цього суттєвому підвищенню надійності у всій системі сприяє також поділ обсягу кожної з робочих порожнин у циліндрі 87 циліндрично-штокової штанги між двома камерами, що заповнені речовиною у рухомому стані під тиском, де він у кожній камері виміряний своїм сенсором незалежного давача тиску. Таке отримання однотипних вимірів, які надані від різних джерел, в подальшому дозволило виявляти та аналізувати навіть дуже незначні розбіжності в отриманих даних про стан фіксації, що зумовлює поліпшення роздільної здатності оцінки поточних реакцій на будь-які механічні впливи на окремі деталі як на чутливі елементи гнучкої функціонально орієнтованої несучої конструкції запропонованої інформаційно-вимірювальної системи. До відповідних важелів та стрижнів кожну з двоходових циліндрично-штокових штанг контрольованої довжини приєднано шляхом виконання відомого виделкового з'єднання (Фіг. 9), яке компенсує без люфтів кутові зрушення під час зміни просторового стану, залишивши кожного разу чітко визначеним розмір з'єднуючої ланки, обумовлений поточною довжиною штанги, тобто саме тією змінюваною часткою штока 88, яка виходить за межі циліндра 87. Таке з'єднання виконано, наприклад, через відоме застосування на закінченнях відповідно штока і циліндра з'єднувальних вилок 105 із штифтами, що введені в радіальні отвори в їх захватах. Штифти фіксують різьбою в отворах у розрізному кільці із канавкою перпендикулярно до лінії захвату вилки, яким охоплено іншу опукло виступаючу над поверхнею кільцеву напресовку, закріплену на поверхні важеля або стрижня. Розрізне кільце із канавкою, що за розмірами співпадає із розмірами цієї кільцевої напресовки, має спроможність до обертання із невеликим нормованим тертям навколо неї, але не має будь-якого ходу вздовж осі важеля чи стрижня через входження кільцевої напресовки у канавку розрізного кільця із мінімальним для рухомого з'єднання технологічним зазором. В межах функціонально орієнтованої механічної несучої конструкції використано три типи циліндрично-штокових телескопічних штанг контрольованої довжини, які є однаковими за складовими їх конструкції (фіг. 9), але дещо різними за розмірами окремих деталей. Така відмінність обумовлена їх місцем розташування і тими важелями, до яких вони приєднані для 26 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 здійснення зрушень та чіткої і надійної просторової фіксації елементів рам у робочому положенні. Штанги 106 (Фіг. 10) для нижньої рами приєднані попарно безпосередньо до важеля 38 кожної опори і знизу до двох суміжних для цього кута стрижнів 45 та 46 трикутної рами біля одного спільного для них коромисла 43. Через меншу довжину важелів 38 у нижньої рами для відхилення на потрібний збільшений кут для досягнення заданої відстані кроку п'яти 42 і переходу у нову позицію при вимірах, величина допустимого ходу штока 88 в циліндрі 87, а відповідно і довжина самого циліндра цього типу штанги 106 є найбільшою. Штанга 107 для верхньої рами прикріплена аналогічно до самих стрижнів 45 та 46, але зверху цієї рами (схема кріплення на фіг. 10 у верхній частині зліва). До важеля 38 опори цієї верхньої рами, який по відношенню до аналогічного важеля нижньої рами є найближчим, шток 88 приєднано через додатковий подовжувач 108, тому величина ходу цього штока для однакових зрушень п'яти 42 є найменшою, а через це зусилля для однакового рівня якості фіксації на кінцевій стороні за правилом механічного важеля стає найбільшим, і для його досягнення діаметр циліндра відповідно виконано збільшеним. Три двоходових циліндрично-штокових телескопічних штанги 109 з'єднали стрижні 45-46 тільки самих цих збірок верхньої та нижньої трикутних рам (зображення на фіг. 10 справа вгорі). Стан поточної довжини штанг 109 відносно постійної довжини стійок 52 як до однієї із однакових сторін у геометричних трикутниках зумовлює кути їх нахилу. Таке визначає загальний шлях допустимого паралельного зрушення або кут розвороту однієї трикутної рами, наприклад верхньої, відносно другої (нижньої), коли в цій фазі робочого положення саме її п'яти 42 введені у механічний контакт із поверхнею досліджуваної ділянки на об'єкті. Середній розмір штанги 109 визначено як довжину гіпотенузи відповідного просторового трикутника, що утворений осями з'єднаних стрижнів 45-46 рами і суміжної з ними стійки 52 як його сторонами, і який в цьому стані у проекції на площину є прямокутним. Із скороченням чи подовженням штанги 109, що є контрольованими через зміну у кількості рухомої речовини під тиском у робочих порожнинах циліндра 87, кут між стійкою 52 та лінією осі стрижнів 45-46 стає відхиленим від 90° через обертання її сферичних закінчень у відповідних сферичних втулках захватів 53 та 54 (Фіг. 7). Кожна із стійок змушує зв'язані з нею стрижні зрушити лінійно, а також усю збірку рами в межах утвореної ферми обертатися навколо вертикальної геометричної осі. За умови одночасного та рівного прирощення довжин усіх штанг 109 положення цієї вертикальної просторової осі постає практично незмінним. Але в іншому випадку, коли одночасну зміну розмірів штанг виконано у різних пропорціях, разом із певним кутом повороту відбулося і горизонтальне лінійне зміщення між подібними точками на різних геометричних осях верхньої та нижньої рам, тобто їх плаский рух. Однак існує як допустиме окреме співвідношення різних за величиною одночасних рухів штоків усіх трьох циліндрично-штокових штанг 109 (наприклад, скорочення двох з них та подовження третьої), при якому відтворено тільки поступальний рух переважно в напрямку будь-якої із бісектрис кутів трикутної рами так, коли у кінцевій точці ці рами займають нове положення у площинах, що паралельні одна до другої. Таким послідовним переміщенням рам та відповідним циклічним синхронізованим підняттям та опусканням їх важелів 38 з установкою п'ят 42 кожного разу в нових місцях контакту з поверхнею здійснено програмовану зміну позицій для проведення вимірювань уздовж траси, що є близькою до прямої лінії, а також при необхідності виконання рухів убік для корекції загального спрямування. При цьому лінійна величина довжини кожного виконаного лінійного переміщення ("кроку") у такому циклі є однозначно і точно визначеною через зафіксовану сукупність змін усіх кутів відхилення стійок 52 і важелів 38 відносно положення осей стрижнів 45-46, завдяки яким відбулося це переміщення, бо незмінними є лінійні розміри елементів самої гнучкої несучої конструкції, опертої на поверхню об'єкта, що складають трикутники, де однією з його сторін кожного разу є частка лінії на самій трасі, і таким чином довжина цієї частки стає відповідно точно визначеною. Тобто крок за кроком кожного разу лінійне прирощення на дистанції траси с якісно виміряним через циклічно змінювані комплекси отриманих значень кутових величин, зафіксованих за допомогою сигналів із відповідних сенсорів, чиї обкладинки конденсаторів інтегровані в обертальні сполучення та інші рухомі деталі рам. Стан дотику до поверхні в заданих чи проміжних точках траси зафіксовано із достатньо великою точністю завдяки динамометричним давачам із сенсорами, закріпленими біля п'яти 42 із важелями 19, 20, які безпосередньо контактують з поверхнею ділянки досліджуваного об'єкта у місцях дотику гальванічних електродів 17 і 18. Але попередньо потрібна інформація про стан 27 UA 113449 C2 5 10 15 20 25 30 35 40 45 50 55 дотику та зусилля від реакції опору ґрунту стає наданою через визначення зміни ємності у конденсаторних сенсорах з обкладинками 40 та 41 відповідно у повзуні 37 та на важелі 38. Просторова модель повністю зібраної функціонально орієнтованої гнучкої механічної несучої конструкції інформаційно-вимірювальної системи у її аксонометричній проекції показана в нижній частині фіг. 10 в стані, коли всі важелі введені в контакт із пласкою горизонтальною ділянкою поверхні на досліджуваному об'єкті. Таке відповідає середньому рівню довжин усіх штанг та центральному (умовно нульовому) значенню усіх кутів повороту для важелів опор та коромисел. У цьому стані є задіяними всі електронні компоненти системи, множину яких складають як давачі кутових та лінійних зрушень у самій механічній несучій конструкції, що необхідні для координації переходів для програмованих змін позицій вимірювальних засобів, так і спеціалізовані давачі із відповідними перетворювачами для цілеспрямованого виконання геофізичних досліджень. Ними, в першу чергу, є давачі магнітометрів із сенсорами 35 та електрометричні засоби визначення потенціалів із контактами у вигляді гальванічних електродів 17 та 18 для їх сенсорів. Вони в кожній позиції, де попередньо є зафіксованими у робочих положеннях важелі 38, здійснюють протягом визначеного програмою активного періоду часу вимір локальних параметрів складових електричного та магнітного полів у всій доступній цим приладам смузі частот коливань для такого методу отримання масиву із змінюваних значень напруженості та величини різниць потенціалів від струмів, що виникають біля поверхні об'єкта. Іншими застосованими засобами вимірювання проявів механічних рухів є аудіометри із стетоскопічними мікрофонами та первинними сенсорами для сприйняття низькочастотних коливань, що їх усіх разом розміщено у модулі 21 на відгалуженнях важелів 38 опор рам механічної несучої конструкції. Локальні координати розташування у геометричному просторі біля введених в контакт з ґрунтом п'ят 42 усіх перелічених сенсорів є важливим носієм інформації про навколишнє середовище, бо в кожному разі досконало виконане за вказаним методом розташування сенсорів обумовило саме очікуваний вплив його фізичних проявів як факторів, що їх треба враховувати під час нормування (корекції) кожної поточної величини акту виміру тої чи іншої базової змінної, яка є цільовою у програмі виконуваних досліджень. Всі разом поточні дані у своїх формах відображення, що у будь-яку мить робочого циклу є отриманими від розгалужених у визначеному просторі позицій окремо діючих сенсорів специфічних давачів, склали загальний потік переважно аналогових інформаційних сигналів, який фізично по електричних чи оптичних лініях зв'язків спрямовано переважно по джгутах 16 до двох різних приладних відсіків, розташованих механічно закріпленими безпосередньо на своїх платах 55 кожної із трикутних рам (Фіг. 11). Приладні відсіки просторово орієнтовані у площині, яку формують лінії осей стрижнів 45-46, завдяки вузлам із сумісним використанням деталей 58-60, що виключають поперекові зміщення відносно цих осей. Самі приладні відсіки тільки разом із платами 55 та стрижнями 45-46 здатні обертатися навколо вертикальної центральної осі кожної із відповідних трикутних рам під дією узгоджених змін довжини окремих двоходових циліндрично-штокових телескопічних штанг 109, яке спонукає поточні зміни кутів розвороту стійок 52, а також телескопічних штанг 106 та 108 для важелів 38 та коромисел 43. Зміни довжин цих штанг крім усього іншого спрямовані на дотримання увесь час заданого стану визначеної орієнтації усіх елементів, що входять до складу системи. Таке досягнуто завдяки активній формі стабілізації протягом періодів робочих положень у кожному з циклів, а також встановлення і дотримання чіткої паралельності із лінією горизонту для будь-якої лінії, приналежної до площини плат 55 приладних відсіків, а через неї усіх окремих давачів, у тому числі спеціалізованих давачів для забезпечення заданої просторової орієнтації. На фіг. 11 приладні відсіки зображено умовно як пара відокремлених угрупувань, де кожне з них складено із трьох умовних дисків, взаємно з'єднаних їх пересіченням, що загалом є адекватною моделлю контурів зовнішніх кришок 56. Під цими кришками у приладному відсіку переважно у центральних частинах плат 55 встановлено комплекс системних приладів для надбання програмованої поточної орієнтації у просторі та контролю її якості для комплексу вимірювальних засобів, де у його складі є переважно сенсори таких трьох видів давачів, як відхилення від вертикалі (ухиломір) і повільних вертикальних коливань ' цієї плати (сейсмометргравіметр), а також бездрейфового визначення поточного напрямку площинних осей відносно магнітного меридіану (компас). Для запропонованої інформаційно-вимірювальної системи можуть бути використані будь-які відомі типи пристроїв для таких застосувань чи окремо взяті давачі, а також повний комплект 28
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01D 21/00
Мітки: інформаційно-вимірювальна, система
Код посилання
<a href="https://ua.patents.su/80-113449-informacijjno-vimiryuvalna-sistema.html" target="_blank" rel="follow" title="База патентів України">Інформаційно-вимірювальна система</a>
Інформаційно-вимірювальна система для гідрогеологічних свердловин
Номер патенту: 54528
Опубліковано: 10.11.2010
Автори: Цибулевський Юрій Євгенович, Дрига Володимир Володимирович, Азарян Альберт Арамаісович
МПК: G01F 23/00
Мітки: система, гідрогеологічних, інформаційно-вимірювальна, свердловин
Формула / Реферат:
Інформаційно-вимірювальна система для гідрогеологічних свердловин, що містить датчики температури та мінералізації води, які через свої АЦП з'єднані з входами мікропроцесора, вихід якого через радіопередавач з'єднано з реєструючим пристроєм, яка відрізняється тим, що вона обладнана блоком керування живленням системи і датчиком контакту корпуса зонда з водою, виходи якого з'єднано з командним входом мікропроцесора і блоком керування живленням...
Інформаційно-вимірювальна система
Номер патенту: 111941
Опубліковано: 11.07.2016
Автори: Конельський Володимир Анатолійович, Манжело Валерій Олександрович, Конельський Віктор Анатолійович
МПК: G01D 21/00
Мітки: інформаційно-вимірювальна, система
Формула / Реферат:
Інформаційно-вимірювальна система, що включає давачі (1) з вимірювальними перетворювачами (2) та мікропроцесори (3) з інтерфейсними пристроями (4), і з них сформовано основу мікропроцесорного вузла (6), а також канали міжвузлових зв'язків із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, яка відрізняється тим, що мікропроцесорні вузли (6) розподілені на окремі функціональні рівні системи і в межах...
Інформаційно-вимірювальна система
Номер патенту: 111957
Опубліковано: 11.07.2016
Автори: Конельський Віктор Анатолійович, Конельський Володимир Анатолійович, Манжело Валерій Олександрович
МПК: G01D 21/00
Мітки: інформаційно-вимірювальна, система
Формула / Реферат:
Інформаційно-вимірювальна система, що включає давачі (1) з вимірювальними перетворювачами (2) та мікропроцесори (3) з інтерфейсними пристроями (4), і з них сформовано основу мікропроцесорного вузла (6), а також канали міжвузлових зв'язків, із залученням яких у межах системи утворено автономну мережу передавання цифрових кодів, в якій мікропроцесорні вузли розподілені на окремі функціональні рівні в межах системи, і мікропроцесорні вузли для...
Лазерна інформаційно-вимірювальна система
Номер патенту: 23214
Опубліковано: 10.05.2007
Автор: Коломійцев Олексій Володимирович
МПК: G01S 17/66, G01S 17/42
Мітки: лазерна, інформаційно-вимірювальна, система
Формула / Реферат:
Лазерна інформаційно-вимірювальна система, що містить приймач-передавач (ПРМ-ПРД), пристрій формування каналів, пристрій формування сигналів, пристрій формування сигналів похибки, виконавчі механізми по кутах азимута і місця та вимірювальні канали похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', яка відрізняється тим, що додатково після ПРМ-ПРД введений інформаційний...
Інформаційно-вимірювальна система
Номер патенту: 111968
Опубліковано: 11.07.2016
Автори: Конельський Віктор Анатолійович, Манжело Валерій Олександрович, Конельський Володимир Анатолійович
МПК: G01D 1/00, G01D 21/00
Мітки: система, інформаційно-вимірювальна
Формула / Реферат:
Інформаційно-вимірювальна система, що включає давачі (1) з вимірювальними перетворювачами (2) та мікропроцесори (3) з інтерфейсними пристроями (4), з них сформовано основу мікропроцесорного вузла (6), а також канали міжвузлових зв'язків, із залученням яких утворено автономну мережу передавання цифрових кодів, де в межах системи мікропроцесорні вузли розподілені на окремі функціональні рівні, і мікропроцесорні вузли для кожного з цих рівнів...
Попередній патент: Везикули, які містять епідермальний фактор росту і його композиції
Наступний патент: Склад для багатокомпонентного дифузійного насичення сталевих виробів
Випадковий патент: Спосіб діагностики переднього увеїту /іридоцикліту/