Спосіб визначення граничного кута поперечної статичної стійкості колісних машин із застосуванням фізичного моделювання
Номер патенту: 101877
Опубліковано: 13.05.2013
Автори: Лілевман Ігор Йосипович, Митрофанов Олександр Петрович, Подольський Михайло Ігорович, Лілевман Олександр Йосипович, Кучеренко Володимир Григорович
Формула / Реферат
1. Спосіб визначення граничного кута поперечної статичної стійкості колісних машин із застосуванням фізичного моделювання, що полягає у визначенні кутів між горизонтальною площиною і площиною опори машини, коли машина перебуває у стані нестійкої рівноваги в результаті її поперечного нахилу на лівий або правий бік, і виборі найменшого з кутів як оцінного значення, який відрізняється тим, що на першому етапі визначення з горизонтально розташованою колісною машиною зв'язують просторову прямокутну систему координат, в якій визначають координати вершин контуру опорної площі та центра ваги машини, на другому етапі за визначеними координатами на робочій площині відповідного пристрою вздовж горизонтальної осі її обертання у зменшеному масштабі будують фізичну модель взаємного просторового розташування контуру опорної площі та центра ваги машини і до точки розташування змодельованого центра ваги підвішують висок, далі робочу площину зазначеного пристрою повертають навколо її горизонтальної осі до того моменту, коли висок перетне змодельований контур опорної площі, що відповідає положенню машини в стані нестійкої рівноваги.
2. Спосіб за п. 1, який відрізняється тим, що поперечні координати вершин контуру опорної площі машини в місцях контакту пневматичних шин небалансирно підвішених коліс з площиною опори зменшують за абсолютною величиною на величину нормального прогину шин.
Текст
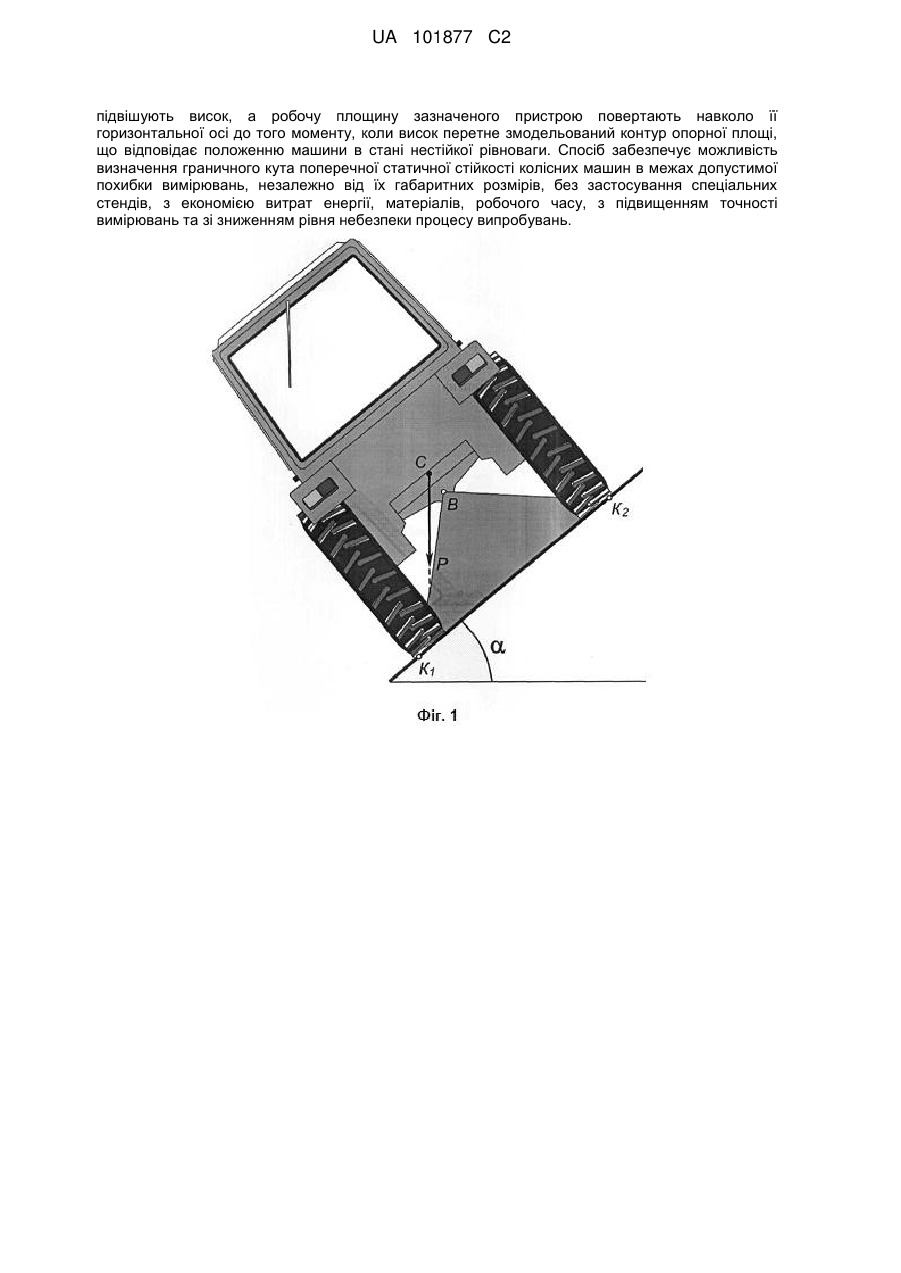
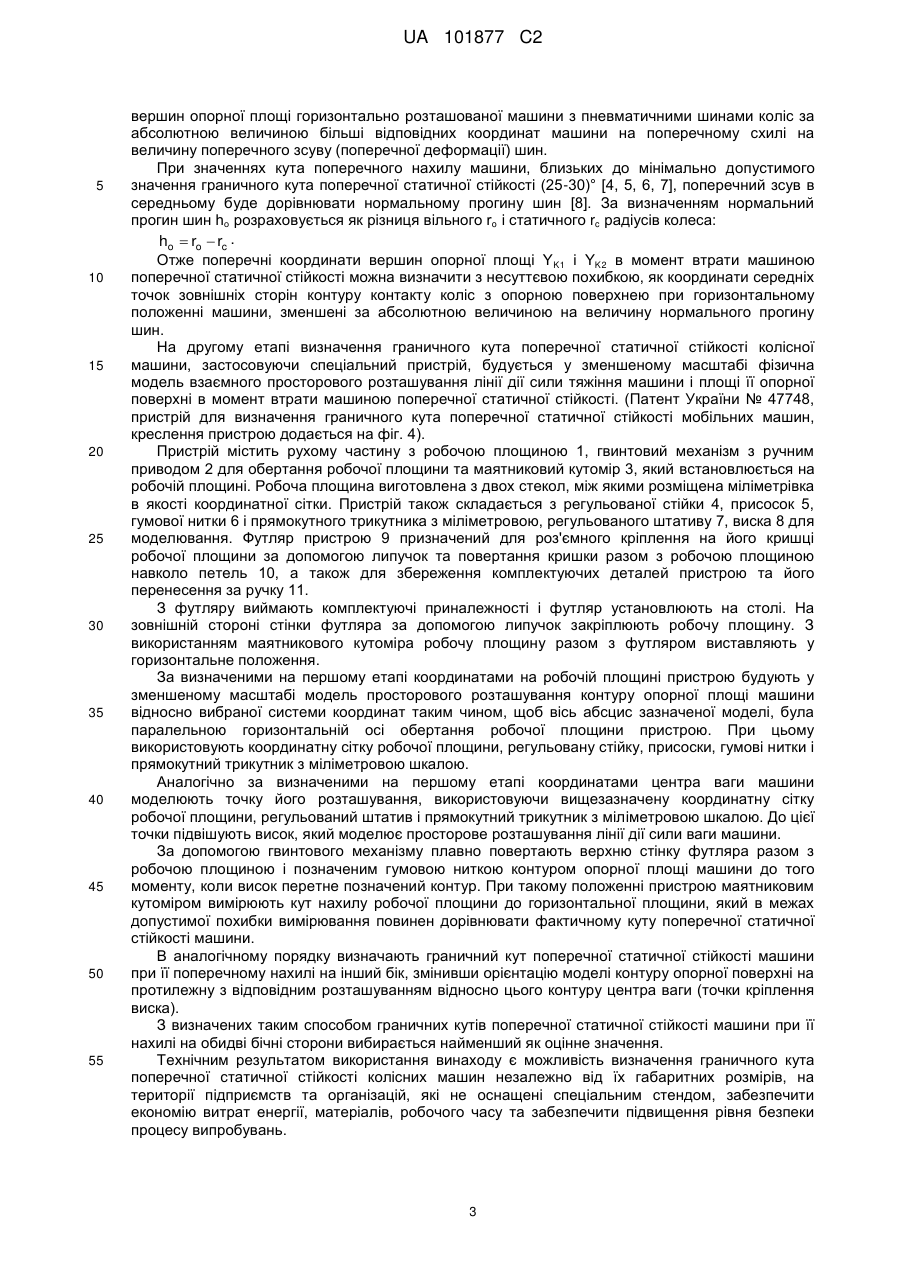
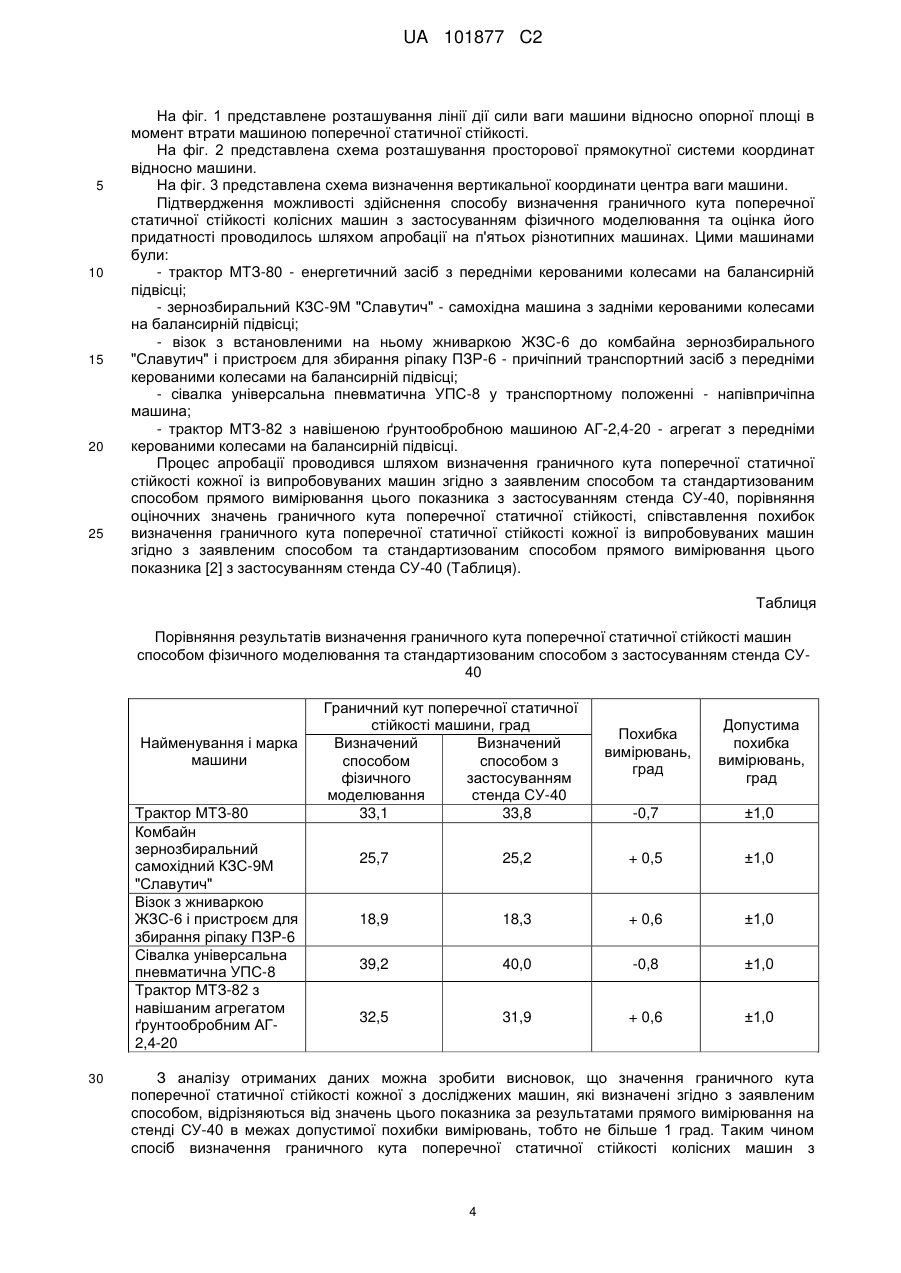
Реферат: Винахід належить до галузі сільгоспмашинобудування, а також може бути використаний в галузях виробництва дорожнього транспорту та дорожньо-будівельних машин. Спосіб визначення граничного кута поперечної статичної стійкості колісних машин із застосуванням фізичного моделювання полягає у визначенні кутів між горизонтальною площиною і площиною опори машини, коли машина перебуває у стані нестійкої рівноваги в результаті її поперечного нахилу на лівий або правий бік, і виборі найменшого з кутів як оцінного значення. Згідно з винаходом, на першому етапі визначення з горизонтально розташованою колісною машиною зв'язують просторову прямокутну систему координат, в якій визначають координати вершин контуру опорної площі та центра ваги машини. На другому етапі за визначеними координатами на робочій площині відповідного пристрою вздовж горизонтальної осі її обертання у зменшеному масштабі будують фізичну модель взаємного просторового розташування контуру опорної площі та центра ваги машини. До точки розташування змодельованого центра ваги UA 101877 C2 (12) UA 101877 C2 підвішують висок, а робочу площину зазначеного пристрою повертають навколо її горизонтальної осі до того моменту, коли висок перетне змодельований контур опорної площі, що відповідає положенню машини в стані нестійкої рівноваги. Спосіб забезпечує можливість визначення граничного кута поперечної статичної стійкості колісних машин в межах допустимої похибки вимірювань, незалежно від їх габаритних розмірів, без застосування спеціальних стендів, з економією витрат енергії, матеріалів, робочого часу, з підвищенням точності вимірювань та зі зниженням рівня небезпеки процесу випробувань. UA 101877 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі сільгоспмашинобудування та призначений для визначення поперечної статичної стійкості колісних машин в процесі їх проектування і випробувань. Поперечна статична стійкість машин характеризується граничними кутами їх поперечного нахилу, при яких машини змінюють стійке положення рівноваги на нестійке [1]. Аналогом є відомий спосіб прямого вимірювання граничних кутів поперечної статичної стійкості мобільної сільгосптехніки за стандартизованою методикою [2], який передбачає застосування спеціального стенду СУ-40, виготовленого Кубанським науково-випробувальним інститутом по випробуванню тракторів. Стенд СУ-40 [3], має вантажну платформу розміром 6000×4000 мм, яка монтується на фундаменті і може змінювати кут нахилу до горизонтальної площини, повертаючись навколо своєї горизонтальної осі під дією гідроциліндрів гідравлічної системи стенда. Машина, що випробується, встановлюється на робочій площині платформи таким чином, щоб її поздовжня вісь була паралельною осі повороту платформи. До коліс або гусениць машини приставляють упори проти її зсуву під час поперечного нахилу, а з протилежного боку машину страхують стропами з деяким провисанням. Кут нахилу платформи збільшують плавно до тих пір, поки будь-яке з коліс або гусениць машини не "відірветься" від платформи, тобто коли машина перейде в стан нестійкої рівноваги. У цей момент подальший рух платформи стенда припиняється і за допомогою маятникового кутоміра вимірюється кут нахилу робочої площини платформи до горизонтальної площини, який є граничним кутом поперечної статичної стійкості машини під час її нахилу на відповідний бік. Аналогічно визначається граничний кут поперечної статичної стійкості машини під час її нахилу на протилежний бік. Найменший з граничних кутів поперечної статичної стійкості машини в результаті її нахилу на лівий та правий боки приймається в якості оцінного значення. Спосіб визначення граничного кута поперечної статичної стійкості машин за допомогою стендів є способом прямого вимірювання показника і тому забезпечує найвищу точність, але йому притаманні наступні недоліки: - в практиці випробувань трапляється багато випадків, коли машина не може бути розміщена на стенді через свої великі габаритні розміри, які перевищують розміри робочої площини стенду; - не може бути використаний поза територіями випробувальних центрів (у тому числі в польових умовах), оскільки стенди - це непересувні засоби вимірювальної техніки; - супроводжується чималими витрати енергії, матеріалів, робочого часу, а значить і коштів, включно з витратами на придбання стенду, на спорудження його будівельної частини та монтаж, установку та закріплення випробуваної машини на стенді та безпосереднє проведення дослідів; - експлуатація стенду відноситься до категорії робіт з підвищеною небезпекою. Технічна задача, яка ставиться перед винаходом, полягає у розробці способу визначення граничного кута поперечної статичної стійкості колісних машин: - незалежно від їх габаритних розмірів; - на території підприємств та організацій, які не оснащені спеціальним стендом; - в межах допустимої похибки вимірювань; - з економією витрат енергії, матеріалів, робочого часу, отже - з економією грошових витрат; - зі зниженням рівня небезпеки процесу випробувань. Теоретичною основою винаходу є та закономірність[1], що втрата машиною поперечної статичної стійкості, тобто перехід із стійкого в нестійке положення рівноваги, відбувається у той момент, коли лінія дії сили ваги Р машини, яка за визначенням проходить крізь центр ваги С, перетинає контур опорної площі К1К2В машини (фіг. 1). Якщо побудувати об'ємну фізичну модель взаємного просторового розташування контуру опорної площі та лінії дії сили ваги поперечно нахиленої машини в момент перетину контуру опорної площі лінією дії сили ваги, то кут поперечного нахилу машини до горизонтальної площини (кут α) і буде шуканим кутом поперечної статичної стійкості. Контур опорної площі машини з балансирною підвіскою керованих коліс наближений до форми трикутника К1К2В з двома вершинами в місцях контакту небалансирно підвішених коліс з площиною опори машини і третьою вершиною в шарнірі балансирної підвіски керованих коліс (фіг. 1). Аналогічний за формою і контур опорної поверхні напівпричіпної машини з тією лише відмінністю, що третя вершина опорного трикутника розташовується на причіпному пристрої. Контур опорної площі причіпної машини з небалансирною підвіскою керованих коліс у більшості випадків має форму прямокутника з вершинами в місцях контакту коліс з площиною опори машини. 1 UA 101877 C2 5 10 15 20 25 30 35 40 45 50 55 Визначення граничного кута поперечної статичної стійкості колісних машин з застосуванням фізичного моделювання складається з двох етапів. На першому етапі визначаються координати вершин контуру опорної площі та координати центру ваги машини. Для цього з горизонтально розташованою машиною зв'язується просторова прямокутна система координат (фіг. 2), в якій вісь абсцис ОХ співпадає з проекцією на площину опори машини вертикальної поздовжньої площини, яка проходить посередині між колесами з небалансирною підвіскою, вісь ординат OY співпадає з проекцією на площину опори машини вертикальної поперечної площини, яка проходить крізь вісь цих коліс, а вісь аплікат OZ перпендикулярна до зазначених координатних осей і перетинає початок координат О. В зазначеній системі координат вимірюються координати вершин контуру опорної площі горизонтально розташованої машини YK1, YK2, XВ, YВ, ZВ та визначаються координати її центру ваги ХС, YС, ZС. Як вершини опорної площі машини приймаються середні точки зовнішніх сторін контуру контакту кожного з коліс, які мають небалансирну підвіску, з площиною опори машини або середню точку шарніра осі коліс, які мають балансирну підвіску. Поздовжню і поперечну координати центру ваги машини визначають шляхом вимірювання сили ваги машини в горизонтальному положенні (фіг. 2) та її розподілу по опорах з наступним розрахунком за формулами: R X R Y R K 2 YK 2 R B YB X C B B , YC K1 K1 , P P де ХC - поздовжня координата центру ваги машини; ХB - поздовжня координата відповідної опори; Р - сила ваги машини; YC - поперечна координата центру ваги машини; RK1, RK2, RB - сили реакції, що діють на відповідні опори; YK1, YK2, YB - поперечні координати відповідних опор. Визначення вертикальної координати центру ваги машини Z C виконують у наступній послідовності: - до бокової сторони горизонтально розташованої машини паралельно її поздовжній осі прикріплюють вертикально розмічувальну дошку розміром не менше 500×500мм таким чином, щоб дошка приблизно по своїй середині перетинала поперечну вертикальну площину, що проходить через горизонтальну поздовжню координату центру тяжіння Х C; - машину встановлюють на платформні ваги, розгальмовують колеса і за допомогою вантажопідйомних засобів піднімають за одну кінцеву частину на кут 20-25° до горизонталі, а інша залишається на вагах (фіг. 3). Для деяких машин підняття на такий кут може бути нездійсненим або небезпечним. У такому випадку можна машину підняти на менший кут, але не менше ніж 15°. У кожному випадку вантажопідйомний строп повинен бути вертикальним; - вимірюють сумарну силу реакцій RОП, що діють на опори з боку платформи ваг (R ОП=RK1+ RK2); - вимірюють горизонтальну відстань d від середньої лінії контурів контакту опор з платформою ваг до поперечної вертикальної площини розташування вантажопідйомного стропа; - розраховують горизонтальну відстань b від центра ваги до поперечної вертикальної площини розташування вантажопідйомного стропа за формулою: R d ; b ОП Р - відмічають вертикальною лінією на розмічувальній дошці відстань b від поперечної вертикальної площини розташування вантажопідйомного стропа і опускають підняту кінцеву частину машини на ваги; - машину піднімають за другу кінцеву частину і при цьому кут піднімання не обов'язково повинен бути таким, як у першому випадку; - повторюють зазначені вище дії, щодо визначення вертикальної координати центру ваги, і при цьому дві нанесені на розмічувальну дошку лінії утворять точку перехрещення С; - машину повертають у горизонтальне положення та вимірюють висоту точки перехрещення ліній (точки С) відносно опорної поверхні площадки для випробувань. Ця висота буде дорівнювати вертикальній координаті центру ваги машини Z C. Далі проводять коригування ординат YK1, YK2, з урахуванням поперечного зсуву (поперечної деформації) шин в момент втрати машиною поперечної статичної стійкості на схилі. Це пояснюється тим, що відносно зв'язаною з машиною системи координат поперечні координати 2 UA 101877 C2 5 10 15 20 25 30 35 40 45 50 55 вершин опорної площі горизонтально розташованої машини з пневматичними шинами коліс за абсолютною величиною більші відповідних координат машини на поперечному схилі на величину поперечного зсуву (поперечної деформації) шин. При значеннях кута поперечного нахилу машини, близьких до мінімально допустимого значення граничного кута поперечної статичної стійкості (25-30)° [4, 5, 6, 7], поперечний зсув в середньому буде дорівнювати нормальному прогину шин [8]. За визначенням нормальний прогин шин hо розраховується як різниця вільного ro і статичного rc радіусів колеса: ho ro rc . Отже поперечні координати вершин опорної площі YK1 і YK2 в момент втрати машиною поперечної статичної стійкості можна визначити з несуттєвою похибкою, як координати середніх точок зовнішніх сторін контуру контакту коліс з опорною поверхнею при горизонтальному положенні машини, зменшені за абсолютною величиною на величину нормального прогину шин. На другому етапі визначення граничного кута поперечної статичної стійкості колісної машини, застосовуючи спеціальний пристрій, будується у зменшеному масштабі фізична модель взаємного просторового розташування лінії дії сили тяжіння машини і площі її опорної поверхні в момент втрати машиною поперечної статичної стійкості. (Патент України № 47748, пристрій для визначення граничного кута поперечної статичної стійкості мобільних машин, креслення пристрою додається на фіг. 4). Пристрій містить рухому частину з робочою площиною 1, гвинтовий механізм з ручним приводом 2 для обертання робочої площини та маятниковий кутомір 3, який встановлюється на робочій площині. Робоча площина виготовлена з двох стекол, між якими розміщена міліметрівка в якості координатної сітки. Пристрій також складається з регульованої стійки 4, присосок 5, гумової нитки 6 і прямокутного трикутника з міліметровою, регульованого штативу 7, виска 8 для моделювання. Футляр пристрою 9 призначений для роз'ємного кріплення на його кришці робочої площини за допомогою липучок та повертання кришки разом з робочою площиною навколо петель 10, а також для збереження комплектуючих деталей пристрою та його перенесення за ручку 11. З футляру виймають комплектуючі приналежності і футляр установлюють на столі. На зовнішній стороні стінки футляра за допомогою липучок закріплюють робочу площину. З використанням маятникового кутоміра робочу площину разом з футляром виставляють у горизонтальне положення. За визначеними на першому етапі координатами на робочій площині пристрою будують у зменшеному масштабі модель просторового розташування контуру опорної площі машини відносно вибраної системи координат таким чином, щоб вісь абсцис зазначеної моделі, була паралельною горизонтальній осі обертання робочої площини пристрою. При цьому використовують координатну сітку робочої площини, регульовану стійку, присоски, гумові нитки і прямокутний трикутник з міліметровою шкалою. Аналогічно за визначеними на першому етапі координатами центра ваги машини моделюють точку його розташування, використовуючи вищезазначену координатну сітку робочої площини, регульований штатив і прямокутний трикутник з міліметровою шкалою. До цієї точки підвішують висок, який моделює просторове розташування лінії дії сили ваги машини. За допомогою гвинтового механізму плавно повертають верхню стінку футляра разом з робочою площиною і позначеним гумовою ниткою контуром опорної площі машини до того моменту, коли висок перетне позначений контур. При такому положенні пристрою маятниковим кутоміром вимірюють кут нахилу робочої площини до горизонтальної площини, який в межах допустимої похибки вимірювання повинен дорівнювати фактичному куту поперечної статичної стійкості машини. В аналогічному порядку визначають граничний кут поперечної статичної стійкості машини при її поперечному нахилі на інший бік, змінивши орієнтацію моделі контуру опорної поверхні на протилежну з відповідним розташуванням відносно цього контуру центра ваги (точки кріплення виска). З визначених таким способом граничних кутів поперечної статичної стійкості машини при її нахилі на обидві бічні сторони вибирається найменший як оцінне значення. Технічним результатом використання винаходу є можливість визначення граничного кута поперечної статичної стійкості колісних машин незалежно від їх габаритних розмірів, на території підприємств та організацій, які не оснащені спеціальним стендом, забезпечити економію витрат енергії, матеріалів, робочого часу та забезпечити підвищення рівня безпеки процесу випробувань. 3 UA 101877 C2 5 10 15 20 25 На фіг. 1 представлене розташування лінії дії сили ваги машини відносно опорної площі в момент втрати машиною поперечної статичної стійкості. На фіг. 2 представлена схема розташування просторової прямокутної системи координат відносно машини. На фіг. 3 представлена схема визначення вертикальної координати центра ваги машини. Підтвердження можливості здійснення способу визначення граничного кута поперечної статичної стійкості колісних машин з застосуванням фізичного моделювання та оцінка його придатності проводилось шляхом апробації на п'ятьох різнотипних машинах. Цими машинами були: - трактор МТЗ-80 - енергетичний засіб з передніми керованими колесами на балансирній підвісці; - зернозбиральний КЗС-9М "Славутич" - самохідна машина з задніми керованими колесами на балансирній підвісці; - візок з встановленими на ньому жниваркою ЖЗС-6 до комбайна зернозбирального "Славутич" і пристроєм для збирання ріпаку ПЗР-6 - причіпний транспортний засіб з передніми керованими колесами на балансирній підвісці; - сівалка універсальна пневматична УПС-8 у транспортному положенні - напівпричіпна машина; - трактор МТЗ-82 з навішеною ґрунтообробною машиною АГ-2,4-20 - агрегат з передніми керованими колесами на балансирній підвісці. Процес апробації проводився шляхом визначення граничного кута поперечної статичної стійкості кожної із випробовуваних машин згідно з заявленим способом та стандартизованим способом прямого вимірювання цього показника з застосуванням стенда СУ-40, порівняння оціночних значень граничного кута поперечної статичної стійкості, співставлення похибок визначення граничного кута поперечної статичної стійкості кожної із випробовуваних машин згідно з заявленим способом та стандартизованим способом прямого вимірювання цього показника [2] з застосуванням стенда СУ-40 (Таблиця). Таблиця Порівняння результатів визначення граничного кута поперечної статичної стійкості машин способом фізичного моделювання та стандартизованим способом з застосуванням стенда СУ40 Найменування і марка машини Трактор МТЗ-80 Комбайн зернозбиральний самохідний КЗС-9М "Славутич" Візок з жниваркою ЖЗС-6 і пристроєм для збирання ріпаку ПЗР-6 Сівалка універсальна пневматична УПС-8 Трактор МТЗ-82 з навішаним агрегатом ґрунтообробним АГ2,4-20 30 Граничний кут поперечної статичної стійкості машини, град Визначений Визначений способом способом з фізичного застосуванням моделювання стенда СУ-40 33,1 33,8 Похибка вимірювань, град Допустима похибка вимірювань, град -0,7 ±1,0 25,7 25,2 + 0,5 ±1,0 18,9 18,3 + 0,6 ±1,0 39,2 40,0 -0,8 ±1,0 32,5 31,9 + 0,6 ±1,0 З аналізу отриманих даних можна зробити висновок, що значення граничного кута поперечної статичної стійкості кожної з досліджених машин, які визначені згідно з заявленим способом, відрізняються від значень цього показника за результатами прямого вимірювання на стенді СУ-40 в межах допустимої похибки вимірювань, тобто не більше 1 град. Таким чином спосіб визначення граничного кута поперечної статичної стійкості колісних машин з 4 UA 101877 C2 5 10 15 20 25 30 35 40 застосуванням фізичного моделювання придатний для випробувань і досліджень мобільної техніки. Використання способу визначення граничного кута поперечної статичної стійкості колісних машин з застосуванням фізичного моделювання забезпечує одержання технічного результату, а саме можливості визначення граничного кута поперечної статичної стійкості колісних машин незалежно від їх габаритних розмірів, на території підприємств та організацій, які не оснащені спеціальним стендом, з економією витрат енергії, матеріалів, робочого часу, отже - з економією грошових витрат, зі зниженням рівня небезпеки процесу випробувань. Джерела інформації: 1. Никитин Е. М. Теоретическая механика. - М.: Наука, 1988, 336 с. 2. ГОСТ 12.2.002-91 ССБТ. Техника сельскохозяйственная. Методы оценки безопасности. 3. Рябцев Б.И., Сасовский А.Н., Циблис Э.Д. Безопасность и эргономичность сельскохозяйственной техники. - К.: Техника, 1988, с. 98, 120 с. 4. ДСТУ 2189-93. ССБП. Машини сільськогосподарські навісні та причіпні. Загальні вимоги безпеки. - Чин. 1994-01-01. - К.: Держстандарт України, 1993, 28 с. 5. ДСТУ 3158-95. Засоби малої механізації для сільськогосподарського виробництва. Загальні вимоги безпеки. - Чин. 1996-07-01. - К.: Держстандарт України, 1995, 31 с. 6. ГОСТ 12.2.019-86 ССБТ. Тракторы и машины самоходные сельскохозяйственные. Общие требования безопасности. 7. ГОСТ 10000-75. Прицепы и полуприцепы тракторные. Общие технические требования. Введ. 1977-01-01 - М.: Изд-во стандартов, 1988, 7 с. 8. Работа автомобильной шины / В. И. Кнороз [и др.]; под общ. ред. В. И. Кнороза. - М.: Транспорт, 1976, 238 с. ФОРМУЛА ВИНАХОДУ 1. Спосіб визначення граничного кута поперечної статичної стійкості колісних машин із застосуванням фізичного моделювання, що полягає у визначенні кутів між горизонтальною площиною і площиною опори машини, коли машина перебуває у стані нестійкої рівноваги в результаті її поперечного нахилу на лівий або правий бік, і виборі найменшого з кутів як оцінного значення, який відрізняється тим, що на першому етапі визначення з горизонтально розташованою колісною машиною зв'язують просторову прямокутну систему координат, в якій визначають координати вершин контуру опорної площі та центра ваги машини, на другому етапі за визначеними координатами на робочій площині відповідного пристрою вздовж горизонтальної осі її обертання у зменшеному масштабі будують фізичну модель взаємного просторового розташування контуру опорної площі та центра ваги машини і до точки розташування змодельованого центра ваги підвішують висок, далі робочу площину зазначеного пристрою повертають навколо її горизонтальної осі до того моменту, коли висок перетне змодельований контур опорної площі, що відповідає положенню машини в стані нестійкої рівноваги. 2. Спосіб за п. 1, який відрізняється тим, що поперечні координати вершин контуру опорної площі машини в місцях контакту пневматичних шин небалансирно підвішених коліс з площиною опори зменшують за абсолютною величиною на величину нормального прогину шин. 5 UA 101877 C2 6 UA 101877 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for the determination of critical angle of transverse static stability of wheeled vehicles using physical modeling
Автори англійськоюLilevman Igor Yosypovych, Mytrofanov Oleksandr Petrovych, Podolskui Mykhailo Ihorovych, Lilevman Oleksandr Yosypovych, Kucherenko Volodymyr Hryhorovych
Назва патенту російськоюСпособ определения предельного угла поперечной статической устойчивости колесных машин с применением физического моделирования
Автори російськоюЛилевман Игорь Иосифович, Митрофанов Александр Петрович, Подольский Михаил Игоревич, Лилевман Александр Иосифович, Кучеренко Владимир Григорьевич
МПК / Мітки
МПК: G01M 1/00, G09B 23/04, G01B 5/24
Мітки: поперечної, спосіб, граничного, кута, застосуванням, фізичного, моделювання, колісних, статичної, машин, визначення, стійкості
Код посилання
<a href="https://ua.patents.su/9-101877-sposib-viznachennya-granichnogo-kuta-poperechno-statichno-stijjkosti-kolisnikh-mashin-iz-zastosuvannyam-fizichnogo-modelyuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення граничного кута поперечної статичної стійкості колісних машин із застосуванням фізичного моделювання</a>
Пристрій для визначення граничного кута поперечної статичної стійкості мобільних машин

Номер патенту: 47748
Опубліковано: 25.02.2010
Автори: Лілевман Олександр Йосипович, Терещук Зоя Михайлівна, Митрофанов Олександр Петрович, Лілевман Ігор Йосипович
МПК: G01M 1/00
Мітки: граничного, пристрій, визначення, поперечної, статичної, кута, мобільних, машин, стійкості
Формула / Реферат:
1. Пристрій для визначення граничного кута поперечної статичної стійкості мобільних машин, що містить рухому частину з робочою площиною (1), яка може повертатися навколо горизонтальної осі, механізм її повертання (2) і маятниковий кутомір (3), який встановлюється на цій площині, який відрізняється тим, що є переносним і малогабаритним, забезпечує визначення граничного кута поперечної статичної стійкості методом моделювання контуру опорної...
Стенд для визначення поперечної статичної стійкості транспортного засобу
Номер патенту: 26276
Опубліковано: 10.09.2007
Автори: Лілевман Ігор Йосипович, Бондарєв Євгеній Ілліч, Митрофанов Олександр Петрович
МПК: G01P 1/00
Мітки: статичної, транспортного, визначення, поперечної, стійкості, стенд, засобу
Формула / Реферат:
1. Стенд для визначення поперечної статичної стійкості транспортного засобу, що складається з вантажної платформи, встановленої на опорах, насосної станції, яка через гідролінії з'єднана з гідроциліндрами, що нахиляють платформу, на якій встановлено транспортний засіб, до якого прикріплено страхувальні ланцюги, та упори і кутомір, що встановлені на платформі, який відрізняється тим, що у вантажній платформі, під переднім і заднім колесами...
Спосіб підвищення поперечної стійкості колісних машин з використанням електронних систем
Номер патенту: 77840
Опубліковано: 25.02.2013
Автори: Полянський Олександр Сергійович, Подригало Михайло Абович, Дубінін Євген Олександрович, Клец Дмитро Михайлович, Задорожня Вікторія Володимирівна
МПК: B60W 30/02
Мітки: машин, поперечної, колісних, підвищення, використанням, стійкості, спосіб, електронних, систем
Формула / Реферат:
Спосіб підвищення поперечної стійкості колісних машин, що полягає в зменшенні вертикальних прискорень до значення, меншого за критичне, який відрізняється тим, що зменшення вертикальних прискорень здійснюється електронним блоком керування, який знижує подачу палива.
Спосіб підвищення поперечної стійкості колісних машин зі складаними рамами

Номер патенту: 63494
Опубліковано: 10.10.2011
Автори: Подригало Михайло Абович, Полянський Олександр Сергійович, Дубінін Євген Олександрович, Задорожня Вікторія Володимирівна
МПК: B60W 30/02
Мітки: поперечної, складаними, колісних, підвищення, машин, рамами, спосіб, стійкості
Формула / Реферат:
Спосіб підвищення поперечної стійкості колісних машин зі складаними рамами, що включає зменшення вертикальних прискорень до значення, меншого за критичне, який відрізняється тим, що зменшення вертикальних прискорень здійснюють демпфуючими елементами.
Стенд для визначення поперечної статичної стійкості транспортного засобу
Номер патенту: 45054
Опубліковано: 26.10.2009
Автори: Бондарев Євген Ілліч, Мазурак Михайло Васильович, Залужний Володимир Іванович, Сало Ярослав Михайлович
МПК: G01P 1/00
Мітки: засобу, поперечної, транспортного, статичної, стенд, стійкості, визначення
Формула / Реферат:
1. Стенд для визначення поперечної статичної стійкості транспортного засобу, що містить вантажну платформу, встановлену на опорах, гідроциліндри, що нахиляють платформу, на якій встановлено транспортний засіб, до якого прикріплено страхові ланцюги і упори та кутомір, що встановлені на платформі, який відрізняється тим, що як привід гідроциліндрів використовують гідрофікований універсальний транспортний засіб з гідролініями, в якому визначають...
Попередній патент: Спосіб визначення протіоконазолу та тебуконазолу – діючих речовин препарату для протруювання насіння ламардор 400 fs, т.к.с. в протруєному насінні сої та люпину
Наступний патент: Спосіб установки штукатурних проміжних металевих маяків
Випадковий патент: Спосіб утворення каркасних будівель із збірних елементів