Адаптивний двоваловий віброзмішувач
Номер патенту: 102304
Опубліковано: 25.06.2013
Автори: Цуркан Олег Васильович, Чубик Роман Васильович, Ярошенко Леонід Вікторович
Формула / Реферат
Адаптивний двоваловий віброзмішувач, що містить встановлений на рамі за допомогою пружних елементів та обладнаний пристроєм для створення коливного руху корпус із розміщеними у ньому двома лопатевими валами, кінці яких виведені за межі корпуса і жорстко з'єднані із протилежно встановленими веденими ланками, а ведучі ланки сполучені з маятниками із вантажами, які за допомогою пружин з'єднані з корпусом, причому маятники жорстко прикріплені до встановлених на окремих осях шестерень, щеплених із зубчастими вінцями, що розміщені на ведучих ланках, який відрізняється тим, що ведучі і ведені ланки є елементами електромагнітних порошкових муфт, які електрично з'єднані із виходами блока синхронізації приводу, а блок синхронізації приводу своїми іншими виходами також з'єднаний із одним із входів блока впливу на вібропривід детектора та з одним із входів детектора зсуву фаз, другий вхід детектора зсуву фаз з'єднаний із давачем вібрації, який жорстко прикріплений до корпусу адаптивного двовалового віброзмішувача, входом блока технологічно оптимальних параметрів та одним із входів першого компаратора, а другий вхід першого компаратора з'єднано з одним із виходів блока технологічно оптимальних параметрів, другий вихід блока технологічно оптимальних параметрів з'єднаний з одним із входів другого компаратора, інший вхід другого компаратора з'єднано із виходом детектора зсуву фаз, а вихід другого компаратора з'єднано із входом блока синхронізації приводу, вихід першого компаратора з'єднано з одним із входів блока впливу на пристрій для створення коливного руху корпусу, що являє собою керований дебалансний вібропривід.
Текст
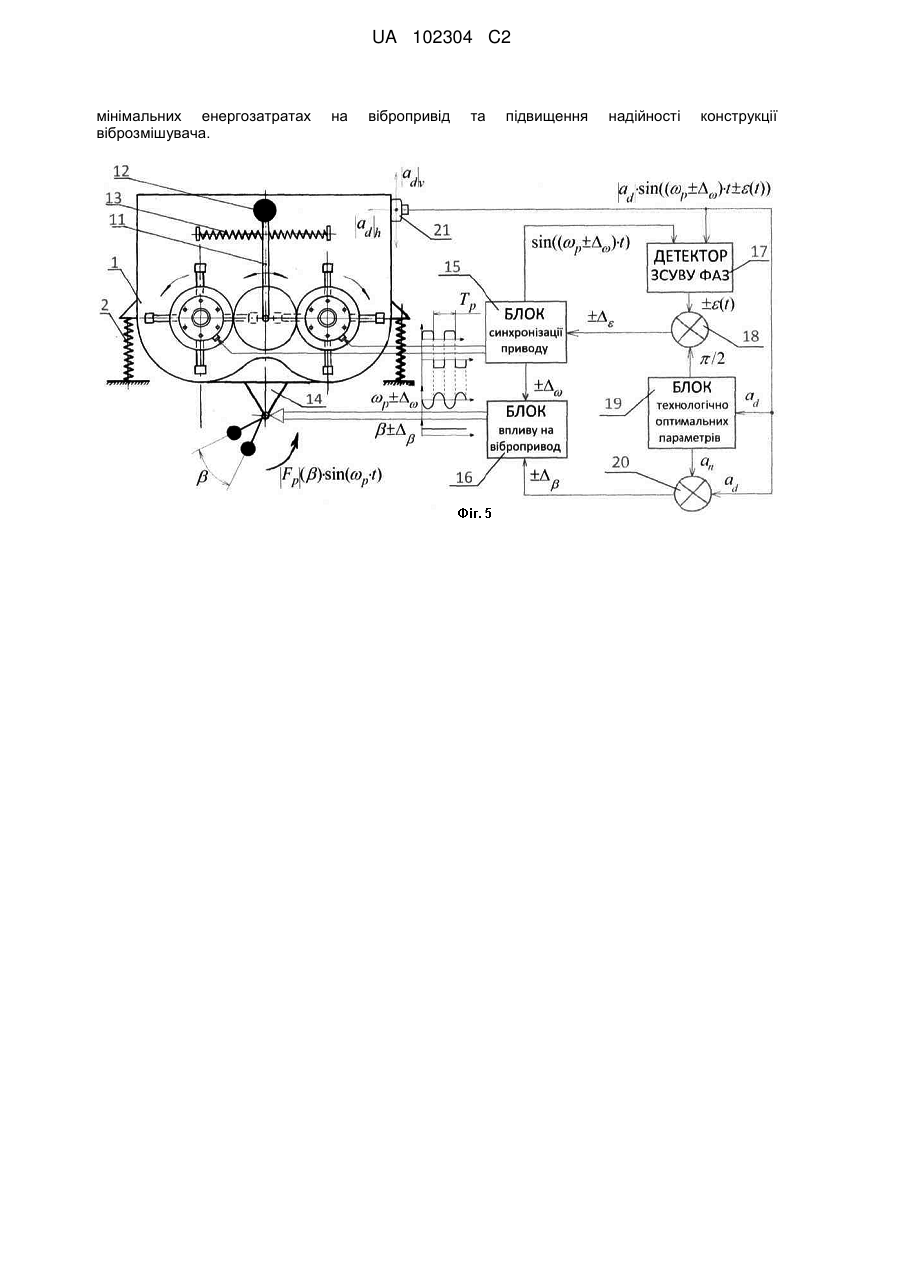
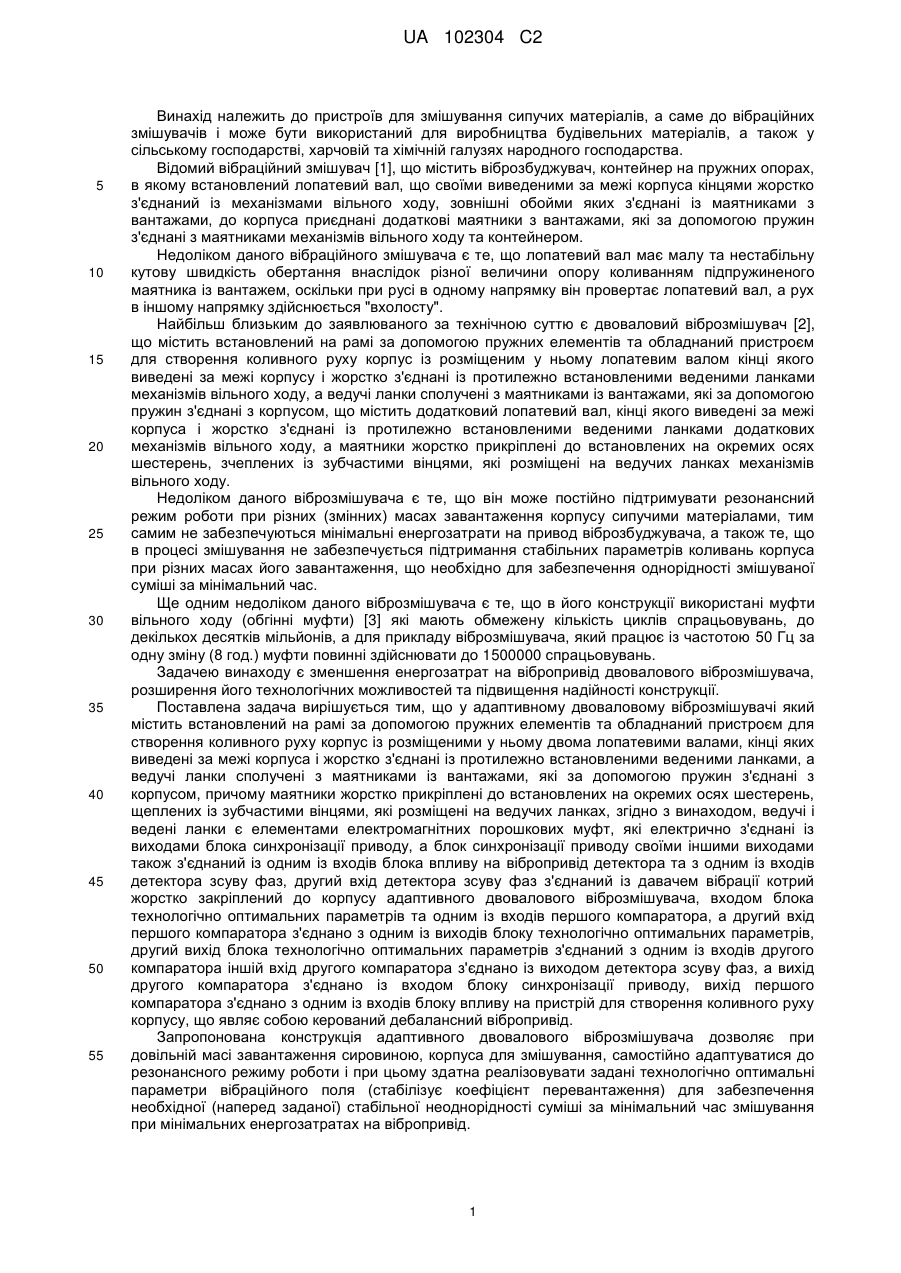
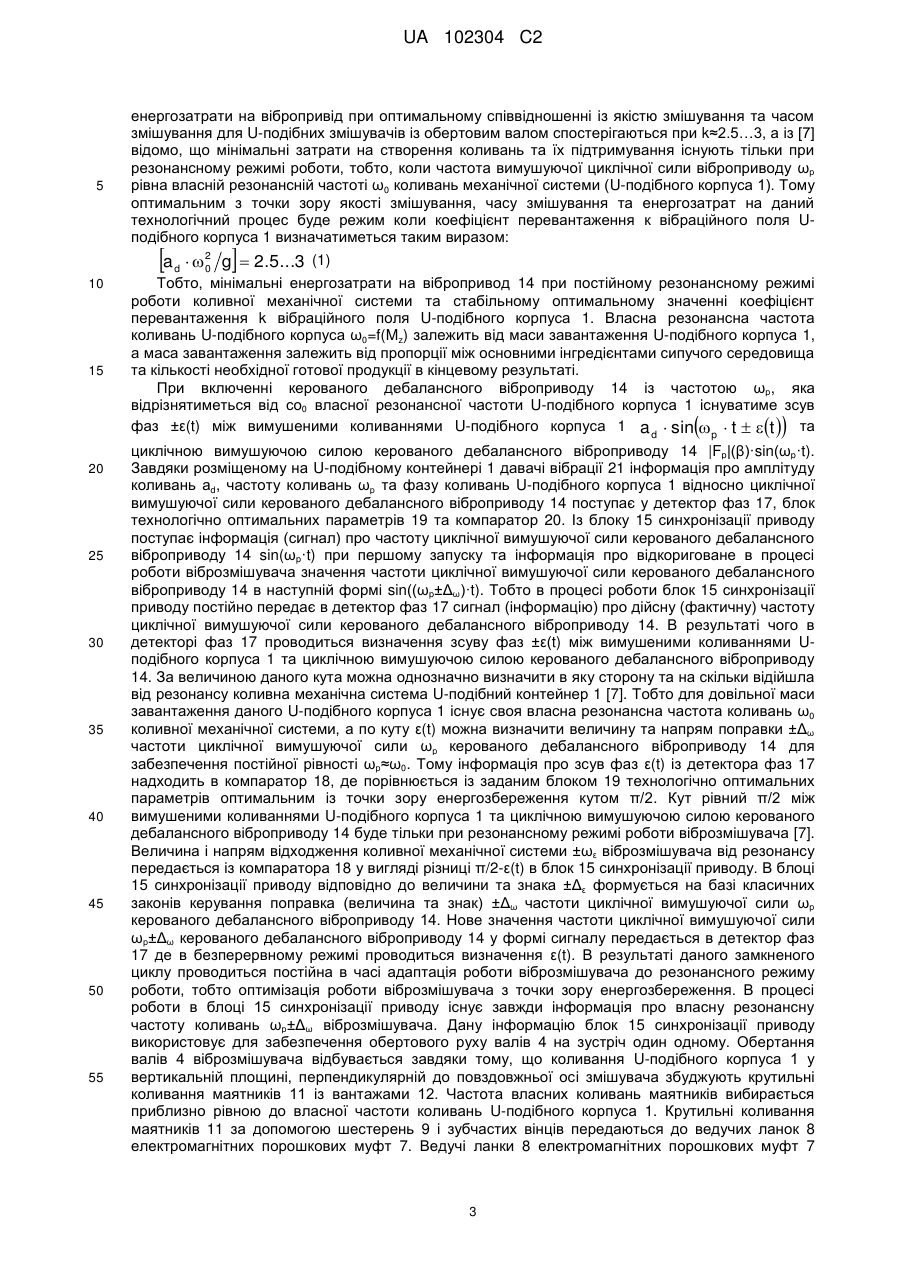
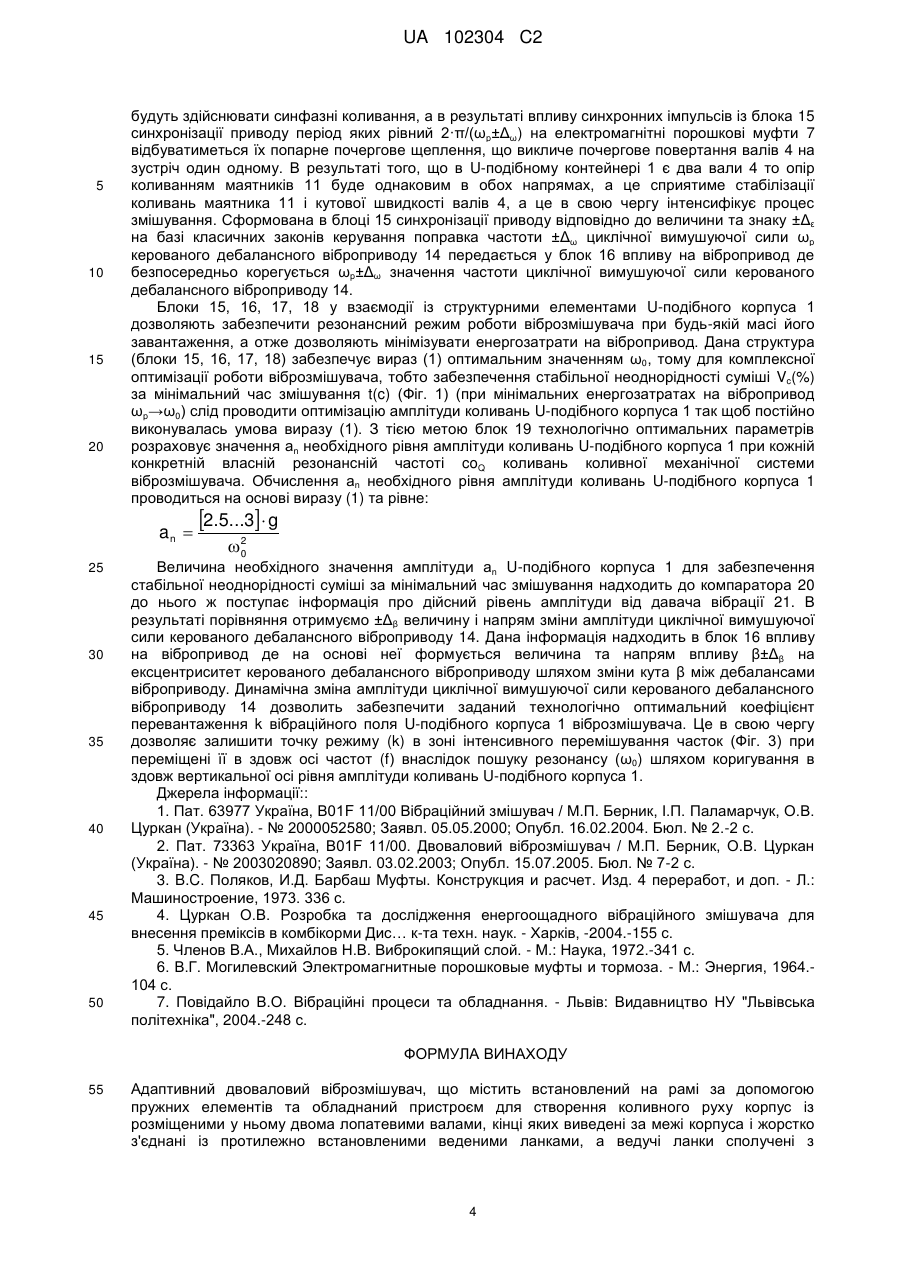
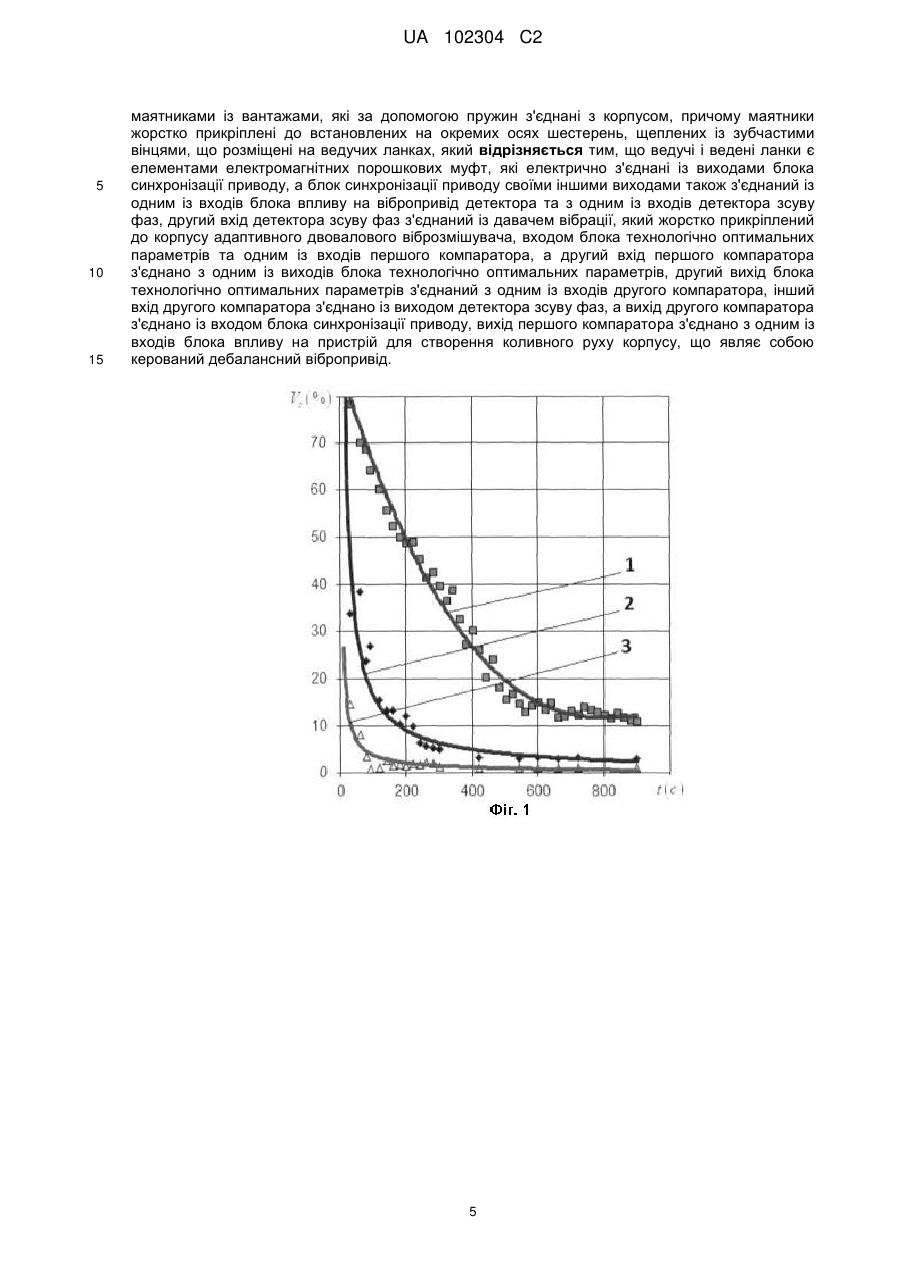
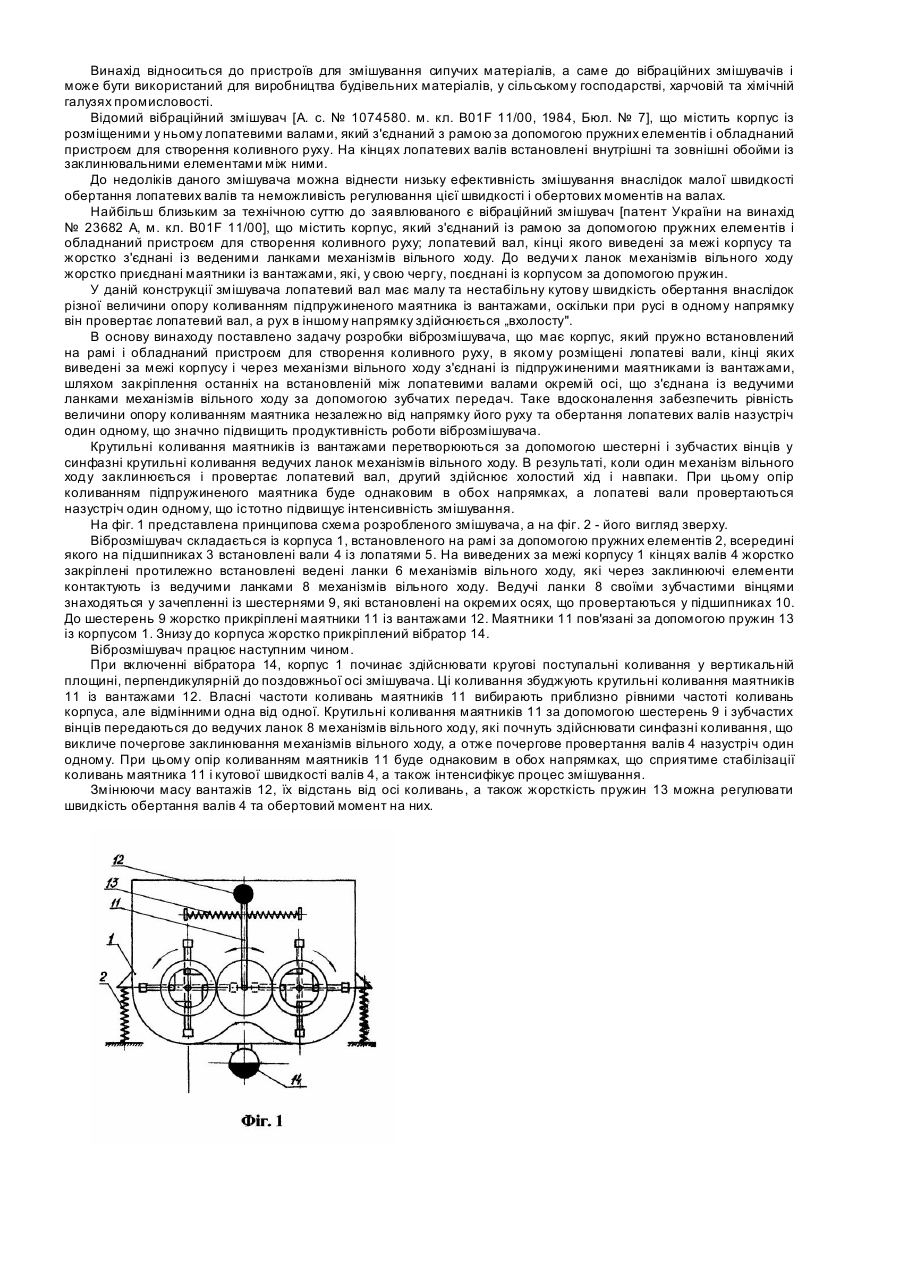
Реферат: Винахід може бути використаний для виробництва будівельних матеріалів, у сільському господарстві, харчовій та хімічній галузях національного господарства. Адаптивний двоваловий віброзмішувач містить встановлений на рамі за допомогою пружних елементів та обладнаний пристроєм для створення коливного руху корпус із розміщеними у ньому двома лопатевими валами кінці яких виведені за межі корпуса і жорстко з'єднані із протилежно встановленими веденими ланками, а ведучі ланки сполучені з маятниками із вантажами, які за допомогою пружин з'єднанні з корпусом, причому маятники жорстко прикріплені до встановлених на окремих осях шестерень, щеплених із зубчастими вінцями, які розміщені на ведучих ланках, згідно з винаходом. Ведучі і ведені ланки є елементами електромагнітних порошкових муфт, які електрично з'єднані з виходами блока синхронізації приводу, а блок синхронізації приводу своїми іншими виходами також з'єднаний із одним із входів блока впливу на вібропривід детектора та з одним із входів детектора зсуву фаз, другий вхід детектора зсуву фаз з'єднаний із давачем вібрації, що жорстко закріплений до корпусу віброзмішувача, входом блока технологічно оптимальних параметрів та одним із входів першого компаратора, а другий вхід першого компаратора з'єднано з одним із виходів блока технологічно оптимальних параметрів, другий вихід блока технологічно оптимальних параметрів з'єднаний з одним із входів другого компаратора іншій вхід другого компаратора з'єднано із виходом детектора зсуву фаз, а вихід другого компаратора з'єднано із входом блока синхронізації приводу, вихід першого компаратора з'єднано з одним із входів блока впливу на пристрій для створення коливного руху корпусу, що являє собою керований дебалансний вібропривід. Технічний результат: підтримання резонансного режиму роботи адаптивного двовалового віброзмішувача при довільній масі завантаження сировиною його корпусу при реалізації заданих технологічно оптимальних параметрів вібраційного поля (стабілізації коефіцієнта перевантаження) для забезпечення необхідної стабільної неоднорідності суміші за мінімальний час змішування при UA 102304 C2 (12) UA 102304 C2 мінімальних енергозатратах віброзмішувача. на вібропривід та підвищення надійності конструкції UA 102304 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до пристроїв для змішування сипучих матеріалів, а саме до вібраційних змішувачів і може бути використаний для виробництва будівельних матеріалів, а також у сільському господарстві, харчовій та хімічній галузях народного господарства. Відомий вібраційний змішувач [1], що містить віброзбуджувач, контейнер на пружних опорах, в якому встановлений лопатевий вал, що своїми виведеними за межі корпуса кінцями жорстко з'єднаний із механізмами вільного ходу, зовнішні обойми яких з'єднані із маятниками з вантажами, до корпуса приєднані додаткові маятники з вантажами, які за допомогою пружин з'єднані з маятниками механізмів вільного ходу та контейнером. Недоліком даного вібраційного змішувача є те, що лопатевий вал має малу та нестабільну кутову швидкість обертання внаслідок різної величини опору коливанням підпружиненого маятника із вантажем, оскільки при русі в одному напрямку він провертає лопатевий вал, а рух в іншому напрямку здійснюється "вхолосту". Найбільш близьким до заявлюваного за технічною суттю є двоваловий віброзмішувач [2], що містить встановлений на рамі за допомогою пружних елементів та обладнаний пристроєм для створення коливного руху корпус із розміщеним у ньому лопатевим валом кінці якого виведені за межі корпусу і жорстко з'єднані із протилежно встановленими веденими ланками механізмів вільного ходу, а ведучі ланки сполучені з маятниками із вантажами, які за допомогою пружин з'єднані з корпусом, що містить додатковий лопатевий вал, кінці якого виведені за межі корпуса і жорстко з'єднані із протилежно встановленими веденими ланками додаткових механізмів вільного ходу, а маятники жорстко прикріплені до встановлених на окремих осях шестерень, зчеплених із зубчастими вінцями, які розміщені на ведучих ланках механізмів вільного ходу. Недоліком даного віброзмішувача є те, що він може постійно підтримувати резонансний режим роботи при різних (змінних) масах завантаження корпусу сипучими матеріалами, тим самим не забезпечуються мінімальні енергозатрати на привод віброзбуджувача, а також те, що в процесі змішування не забезпечується підтримання стабільних параметрів коливань корпуса при різних масах його завантаження, що необхідно для забезпечення однорідності змішуваної суміші за мінімальний час. Ще одним недоліком даного віброзмішувача є те, що в його конструкції використані муфти вільного ходу (обгінні муфти) [3] які мають обмежену кількість циклів спрацьовувань, до декількох десятків мільйонів, а для прикладу віброзмішувача, який працює із частотою 50 Гц за одну зміну (8 год.) муфти повинні здійснювати до 1500000 спрацьовувань. Задачею винаходу є зменшення енергозатрат на вібропривід двовалового віброзмішувача, розширення його технологічних можливостей та підвищення надійності конструкції. Поставлена задача вирішується тим, що у адаптивному двоваловому віброзмішувачі який містить встановлений на рамі за допомогою пружних елементів та обладнаний пристроєм для створення коливного руху корпус із розміщеними у ньому двома лопатевими валами, кінці яких виведені за межі корпуса і жорстко з'єднані із протилежно встановленими веденими ланками, а ведучі ланки сполучені з маятниками із вантажами, які за допомогою пружин з'єднані з корпусом, причому маятники жорстко прикріплені до встановлених на окремих осях шестерень, щеплених із зубчастими вінцями, які розміщені на ведучих ланках, згідно з винаходом, ведучі і ведені ланки є елементами електромагнітних порошкових муфт, які електрично з'єднані із виходами блока синхронізації приводу, а блок синхронізації приводу своїми іншими виходами також з'єднаний із одним із входів блока впливу на вібропривід детектора та з одним із входів детектора зсуву фаз, другий вхід детектора зсуву фаз з'єднаний із давачем вібрації котрий жорстко закріплений до корпусу адаптивного двовалового віброзмішувача, входом блока технологічно оптимальних параметрів та одним із входів першого компаратора, а другий вхід першого компаратора з'єднано з одним із виходів блоку технологічно оптимальних параметрів, другий вихід блока технологічно оптимальних параметрів з'єднаний з одним із входів другого компаратора іншій вхід другого компаратора з'єднано із виходом детектора зсуву фаз, а вихід другого компаратора з'єднано із входом блоку синхронізації приводу, вихід першого компаратора з'єднано з одним із входів блоку впливу на пристрій для створення коливного руху корпусу, що являє собою керований дебалансний вібропривід. Запропонована конструкція адаптивного двовалового віброзмішувача дозволяє при довільній масі завантаження сировиною, корпуса для змішування, самостійно адаптуватися до резонансного режиму роботи і при цьому здатна реалізовувати задані технологічно оптимальні параметри вібраційного поля (стабілізує коефіцієнт перевантаження) для забезпечення необхідної (наперед заданої) стабільної неоднорідності суміші за мінімальний час змішування при мінімальних енергозатратах на вібропривід. 1 UA 102304 C2 5 На фіг. 1 зображено [4] залежність неоднорідності змішуваної суміші Vс(%) від часу змішування t(с) при різних схемах змішування в U-подібному корпусі: 1 - вібраційне змішування -1 при величині коефіцієнта перевантаження k=[2.5…3], nл=0 хв ; 2 - із лопатевим валом при k=0, -1 -1 nл=30 хв ; 3 - вібраційне змішування із лопатевим валом при k=[2.5…3], nл=30 хв . Як характеристику вібраційного поля при змішуванні для визначення стану сипучого середовища використовують коефіцієнт перевантаження [7] k, який в літературі ще називають коефіцієнтом режиму вібрації [5] або коефіцієнтом динамічності [8], що визначається за формулою: 2 2 k ad p g , де ad - дійсна амплітуда коливань U-подібного корпуса, рівна k ad p g , де 10 |ad|v та |ad|h миттєва вертикальна та горизонтальна складова коливань U-подібного корпуса 1, м; ωр - кутова швидкість коливань дебалансного віброприводу U-подібного корпуса двовалового -1 2 віброзмішувача, с ; g - прискорення вільного падіння, м/с . Фізичний зміст коефіцієнта перевантаження k легко зрозуміти беручи до уваги те, що при коливному русі переміщення Uподібного корпуса (в загальному) рівне s(t)=ad×sin(ωp·t), v(t)=ds/dt, тоді v(t)=ad·ωp·cos(ωp·t) a(t)=dv/dt, тоді прискорення коливань U-подібного корпуса рівне 15 20 25 30 35 40 45 50 55 2 at ad p sin t . Виходячи із вище наведених фактів видно, що k показує у скільки разів прискорення коливань U-подібного корпуса 1 більше за прискорення вільного падіння тобто показує величину перевантаження. Змішували зерно ріпаку і ячменю в співвідношенні 1:8. На фіг. 2 зображено залежність [4] енергетичних параметрів віброзмішувача від величини коефіцієнта перевантаження к: Рв потужність, яку споживає електродвигун привода вала віброзбуджувача, привода неколивного лопатевого вала Рл та їх сумарна потужність РΣ від параметрів вібраційного поля, які виражені через коефіцієнт режиму вібрації (перевантаження). На Фіг. 3 зображено [5] два стани сипучого матеріалу, що піддається вібрації: А - віброзріджений шар; Б - віброкипучий шар; І - область сепарації часток; II - область інтенсивного перемішування часток: 1 - кварцового піску з розміром часток 0,165-0,355 мм; 2 - кварцового піску з розміром часток 0,355-0,6 мм; 3 - металевих кульок діаметром 0,65-7 мм. Фіг. 4 та Фіг. 5 зображена пропонована конструкція адаптивного двовалового віброзмішувача. Адаптивний двоваловий віброзмішувач складається із U-подібного корпуса 1, який встановлено на рамі за допомогою пружних елементів 2. Всередині U-подібного корпуса 1 на підшипниках 3 встановлено два вали 4 із жорстко на них закріпленими лопатями 5. На виведених за межі U-подібного корпуса 1 кінцях двох валів 4 жорстко закріплені протилежно встановлені ведені ланки 6 електромагнітних порошкових муфт 7 [6], які під дією електричного струму, що подається на їхні котушки, жорстко з'єднуються та передають обертовий момент із ведучих ланок 8 електромагнітних порошкових муфт 7. Ведучі ланки 8 електромагнітних порошкових муфт 7 своїми зубчастими вінцями входять у зачеплення із шестернями 9, які встановлені на окремих осях, що повертаються у підшипниках 10. До шестерень 9 жорстко прикріплені маятники 11 із вантажами 12. Маятники 11 пов'язані за допомогою пружин 13 із Uподібним корпусом 1. З низу до U-подібного корпуса 1 жорстко прикріплений керований дебалансний вібропривод 14. Керований дебалансний вібропривод 14 з'єднаний із блоком впливу на вібропривод 16. Один із входів блока впливу на вібропривід 16 з'єднано із виходом компаратора 20, а другий його вхід з'єднано із виходом блока синхронізації приводу 15. Інші виходи блок синхронізації приводу 15 з'єднано із порошковими електромагнітними муфтами 7 та одним із входів детектора зсуву фаз 17. Другий вхід детектора зсуву фаз 17 з'єднано із входом блоку технологічно оптимальних параметрів 19, одним із входів компаратора 20 та давачем вібрації 21 який жорстко закріплений до U-подібного корпуса 1. Другий вхід компаратора 20 з'єднано з одним із виходів блока технологічно оптимальних параметрів 19, а другий вихід блока технологічно оптимальних параметрів 19 з'єднано з одним із входів компаратора 18, а другий вхід компаратора 18 з'єднано із виходом детектора зсуву фаз 17. Вихід компаратора 18 з'єднано із входом блока синхронізації приводу 15. Принцип роботи адаптивного двовалового віброзмішувача наступний. Для якісного змішування сипучих компонентів, тобто забезпечення стабільної неоднорідності суміші Vc(%) за мінімальний час змішування t(c) (Фіг. 1) при мінімальних енергозатратах на вібропривод (Фіг. 2), необхідно забезпечити певні оптимальні параметри вібраційного поля U-подібного корпуса 1. Відповідно до залежності, що зображена на фіг. 3, постійне перебування динамічних параметрів коливань (ad та ωр) U-подібного корпуса 1 в області інтенсивного перемішування часток II. Включення керованого дебалансного віброприводу 14 забезпечує коливання U-подібного корпуса 1 із певними динамічними параметрами ad та ωр, тобто керований дебалансний вібропривод 14 забезпечує певний коефіцієнт перевантаження k вібраційного поля U-подібного корпуса 1, створюючи поступальні коливання у вертикальній площині, перпендикулярній до повздовжньої осі змішувача. Відповідно до експериментальних досліджень [4] (Фіг. 2) мінімальні 2 UA 102304 C2 5 енергозатрати на вібропривід при оптимальному співвідношенні із якістю змішування та часом змішування для U-подібних змішувачів із обертовим валом спостерігаються при k≈2.5…3, а із [7] відомо, що мінімальні затрати на створення коливань та їх підтримування існують тільки при резонансному режимі роботи, тобто, коли частота вимушуючої циклічної сили віброприводу ωр рівна власній резонансній частоті ω0 коливань механічної системи (U-подібного корпуса 1). Тому оптимальним з точки зору якості змішування, часу змішування та енергозатрат на даний технологічний процес буде режим коли коефіцієнт перевантаження к вібраційного поля Uподібного корпуса 1 визначатиметься таким виразом: 2 a d 0 g 2.5...3 (1) 10 15 Тобто, мінімальні енергозатрати на вібропривод 14 при постійному резонансному режимі роботи коливної механічної системи та стабільному оптимальному значенні коефіцієнт перевантаження k вібраційного поля U-подібного корпуса 1. Власна резонансна частота коливань U-подібного корпуса ω0=f(Mz) залежить від маси завантаження U-подібного корпуса 1, а маса завантаження залежить від пропорції між основними інгредієнтами сипучого середовища та кількості необхідної готової продукції в кінцевому результаті. При включенні керованого дебалансного віброприводу 14 із частотою ωр, яка відрізнятиметься від со0 власної резонансної частоти U-подібного корпуса 1 існуватиме зсув фаз ±ε(t) між вимушеними коливаннями U-подібного корпуса 1 a d sin p t t та 20 25 30 35 40 45 50 55 циклічною вимушуючою силою керованого дебалансного віброприводу 14 |Fp|(β)·sin(ωp·t). Завдяки розміщеному на U-подібному контейнері 1 давачі вібрації 21 інформація про амплітуду коливань аd, частоту коливань ωр та фазу коливань U-подібного корпуса 1 відносно циклічної вимушуючої сили керованого дебалансного віброприводу 14 поступає у детектор фаз 17, блок технологічно оптимальних параметрів 19 та компаратор 20. Із блоку 15 синхронізації приводу поступає інформація (сигнал) про частоту циклічної вимушуючої сили керованого дебалансного віброприводу 14 sin(ωp·t) при першому запуску та інформація про відкориговане в процесі роботи віброзмішувача значення частоти циклічної вимушуючої сили керованого дебалансного віброприводу 14 в наступній формі sin((ωp±Δω)·t). Тобто в процесі роботи блок 15 синхронізації приводу постійно передає в детектор фаз 17 сигнал (інформацію) про дійсну (фактичну) частоту циклічної вимушуючої сили керованого дебалансного віброприводу 14. В результаті чого в детекторі фаз 17 проводиться визначення зсуву фаз ±ε(t) між вимушеними коливаннями Uподібного корпуса 1 та циклічною вимушуючою силою керованого дебалансного віброприводу 14. За величиною даного кута можна однозначно визначити в яку сторону та на скільки відійшла від резонансу коливна механічна система U-подібний контейнер 1 [7]. Тобто для довільної маси завантаження даного U-подібного корпуса 1 існує своя власна резонансна частота коливань ω0 коливної механічної системи, а по куту ε(t) можна визначити величину та напрям поправки ±Δω частоти циклічної вимушуючої сили ωр керованого дебалансного віброприводу 14 для забезпечення постійної рівності ωр≈ω0. Тому інформація про зсув фаз ε(t) із детектора фаз 17 надходить в компаратор 18, де порівнюється із заданим блоком 19 технологічно оптимальних параметрів оптимальним із точки зору енергозбереження кутом π/2. Кут рівний π/2 між вимушеними коливаннями U-подібного корпуса 1 та циклічною вимушуючою силою керованого дебалансного віброприводу 14 буде тільки при резонансному режимі роботи віброзмішувача [7]. Величина і напрям відходження коливної механічної системи ±ωε віброзмішувача від резонансу передається із компаратора 18 у вигляді різниці π/2-ε(t) в блок 15 синхронізації приводу. В блоці 15 синхронізації приводу відповідно до величини та знака ±Δε формується на базі класичних законів керування поправка (величина та знак) ±Δω частоти циклічної вимушуючої сили ωр керованого дебалансного віброприводу 14. Нове значення частоти циклічної вимушуючої сили ωр±Δω керованого дебалансного віброприводу 14 у формі сигналу передається в детектор фаз 17 де в безперервному режимі проводиться визначення ε(t). В результаті даного замкненого циклу проводиться постійна в часі адаптація роботи віброзмішувача до резонансного режиму роботи, тобто оптимізація роботи віброзмішувача з точки зору енергозбереження. В процесі роботи в блоці 15 синхронізації приводу існує завжди інформація про власну резонансну частоту коливань ωр±Δω віброзмішувача. Дану інформацію блок 15 синхронізації приводу використовує для забезпечення обертового руху валів 4 на зустріч один одному. Обертання валів 4 віброзмішувача відбувається завдяки тому, що коливання U-подібного корпуса 1 у вертикальній площині, перпендикулярній до повздовжньої осі змішувача збуджують крутильні коливання маятників 11 із вантажами 12. Частота власних коливань маятників вибирається приблизно рівною до власної частоти коливань U-подібного корпуса 1. Крутильні коливання маятників 11 за допомогою шестерень 9 і зубчастих вінців передаються до ведучих ланок 8 електромагнітних порошкових муфт 7. Ведучі ланки 8 електромагнітних порошкових муфт 7 3 UA 102304 C2 5 10 15 20 будуть здійснювати синфазні коливання, а в результаті впливу синхронних імпульсів із блока 15 синхронізації приводу період яких рівний 2·π/(ωр±Δω) на електромагнітні порошкові муфти 7 відбуватиметься їх попарне почергове щеплення, що викличе почергове повертання валів 4 на зустріч один одному. В результаті того, що в U-подібному контейнері 1 є два вали 4 то опір коливанням маятників 11 буде однаковим в обох напрямах, а це сприятиме стабілізації коливань маятника 11 і кутової швидкості валів 4, а це в свою чергу інтенсифікує процес змішування. Сформована в блоці 15 синхронізації приводу відповідно до величини та знаку ±Δε на базі класичних законів керування поправка частоти ±Δω циклічної вимушуючої сили ωр керованого дебалансного віброприводу 14 передається у блок 16 впливу на вібропривод де безпосередньо корегується ωр±Δω значення частоти циклічної вимушуючої сили керованого дебалансного віброприводу 14. Блоки 15, 16, 17, 18 у взаємодії із структурними елементами U-подібного корпуса 1 дозволяють забезпечити резонансний режим роботи віброзмішувача при будь-якій масі його завантаження, а отже дозволяють мінімізувати енергозатрати на вібропривод. Дана структура (блоки 15, 16, 17, 18) забезпечує вираз (1) оптимальним значенням ω0, тому для комплексної оптимізації роботи віброзмішувача, тобто забезпечення стабільної неоднорідності суміші Vc(%) за мінімальний час змішування t(c) (Фіг. 1) (при мінімальних енергозатратах на вібропривод ωр→ω0) слід проводити оптимізацію амплітуди коливань U-подібного корпуса 1 так щоб постійно виконувалась умова виразу (1). З тією метою блок 19 технологічно оптимальних параметрів розраховує значення аn необхідного рівня амплітуди коливань U-подібного корпуса 1 при кожній конкретній власній резонансній частоті coQ коливань коливної механічної системи віброзмішувача. Обчислення аn необхідного рівня амплітуди коливань U-подібного корпуса 1 проводиться на основі виразу (1) та рівне: an 25 30 35 40 45 50 2.5...3 g 2 0 Величина необхідного значення амплітуди аn U-подібного корпуса 1 для забезпечення стабільної неоднорідності суміші за мінімальний час змішування надходить до компаратора 20 до нього ж поступає інформація про дійсний рівень амплітуди від давача вібрації 21. В результаті порівняння отримуємо ±Δβ величину і напрям зміни амплітуди циклічної вимушуючої сили керованого дебалансного віброприводу 14. Дана інформація надходить в блок 16 впливу на вібропривод де на основі неї формується величина та напрям впливу β±Δβ на ексцентриситет керованого дебалансного віброприводу шляхом зміни кута β між дебалансами віброприводу. Динамічна зміна амплітуди циклічної вимушуючої сили керованого дебалансного віброприводу 14 дозволить забезпечити заданий технологічно оптимальний коефіцієнт перевантаження k вібраційного поля U-подібного корпуса 1 віброзмішувача. Це в свою чергу дозволяє залишити точку режиму (k) в зоні інтенсивного перемішування часток (Фіг. 3) при переміщені її в здовж осі частот (f) внаслідок пошуку резонансу (ω0) шляхом коригування в здовж вертикальної осі рівня амплітуди коливань U-подібного корпуса 1. Джерела інформації:: 1. Пат. 63977 Україна, В01F 11/00 Вібраційний змішувач / М.П. Берник, І.П. Паламарчук, О.В. Цуркан (Україна). - № 2000052580; Заявл. 05.05.2000; Опубл. 16.02.2004. Бюл. № 2.-2 с. 2. Пат. 73363 Україна, В01F 11/00. Двоваловий віброзмішувач / М.П. Берник, О.В. Цуркан (Україна). - № 2003020890; Заявл. 03.02.2003; Опубл. 15.07.2005. Бюл. № 7-2 с. 3. B.C. Поляков, И.Д. Барбаш Муфты. Конструкция и расчет. Изд. 4 переработ, и доп. - Л.: Машиностроение, 1973. 336 с. 4. Цуркан О.В. Розробка та дослідження енергоощадного вібраційного змішувача для внесення преміксів в комбікорми Дис… к-та техн. наук. - Харків, -2004.-155 с. 5. Членов В.А., Михайлов Н.В. Виброкипящий слой. - М.: Наука, 1972.-341 с. 6. В.Г. Могилевский Электромагнитные порошковые муфты и тормоза. - М.: Энергия, 1964.104 с. 7. Повідайло В.О. Вібраційні процеси та обладнання. - Львів: Видавництво НУ "Львівська політехніка", 2004.-248 с. ФОРМУЛА ВИНАХОДУ 55 Адаптивний двоваловий віброзмішувач, що містить встановлений на рамі за допомогою пружних елементів та обладнаний пристроєм для створення коливного руху корпус із розміщеними у ньому двома лопатевими валами, кінці яких виведені за межі корпуса і жорстко з'єднані із протилежно встановленими веденими ланками, а ведучі ланки сполучені з 4 UA 102304 C2 5 10 15 маятниками із вантажами, які за допомогою пружин з'єднані з корпусом, причому маятники жорстко прикріплені до встановлених на окремих осях шестерень, щеплених із зубчастими вінцями, що розміщені на ведучих ланках, який відрізняється тим, що ведучі і ведені ланки є елементами електромагнітних порошкових муфт, які електрично з'єднані із виходами блока синхронізації приводу, а блок синхронізації приводу своїми іншими виходами також з'єднаний із одним із входів блока впливу на вібропривід детектора та з одним із входів детектора зсуву фаз, другий вхід детектора зсуву фаз з'єднаний із давачем вібрації, який жорстко прикріплений до корпусу адаптивного двовалового віброзмішувача, входом блока технологічно оптимальних параметрів та одним із входів першого компаратора, а другий вхід першого компаратора з'єднано з одним із виходів блока технологічно оптимальних параметрів, другий вихід блока технологічно оптимальних параметрів з'єднаний з одним із входів другого компаратора, інший вхід другого компаратора з'єднано із виходом детектора зсуву фаз, а вихід другого компаратора з'єднано із входом блока синхронізації приводу, вихід першого компаратора з'єднано з одним із входів блока впливу на пристрій для створення коливного руху корпусу, що являє собою керований дебалансний вібропривід. 5 UA 102304 C2 6 UA 102304 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive two-shaft vibromixer
Автори англійськоюChubyk Roman Vasyliovych, Yaroshenko Leonid Viktorovych, Tsurkan Oleh Vasyliovych
Назва патенту російськоюАдаптивный двухвальный вибросмеситель
Автори російськоюЧубик Роман Васильевич, Ярошенко Леонид Викторович, Цуркан Олег Васильевич
МПК / Мітки
МПК: B01F 11/00
Мітки: двоваловий, віброзмішувач, адаптивний
Код посилання
<a href="https://ua.patents.su/9-102304-adaptivnijj-dvovalovijj-vibrozmishuvach.html" target="_blank" rel="follow" title="База патентів України">Адаптивний двоваловий віброзмішувач</a>
Двоваловий віброзмішувач
Номер патенту: 73363
Опубліковано: 15.07.2005
Автори: Берник Максим Павлович, Цуркан Олег Васильович
МПК: B01F 11/00
Мітки: двоваловий, віброзмішувач
Формула / Реферат:
Віброзмішувач, що містить встановлений на рамі за допомогою пружних елементів та обладнаний пристроєм для створення коливного руху корпус із розміщеним у ньому лопатевим валом, кінці якого виведені за межі корпуса і жорстко з'єднані із протилежно встановленими веденими ланками механізмів вільного ходу, а ведучі ланки сполучені з маятниками із вантажами, які за допомогою пружин з’єднані з корпусом, який відрізняється тим, що він містить...
Адаптивний діагностичний процесор
Номер патенту: 53459
Опубліковано: 15.01.2003
Автори: Доценко Наталія Володимирівна, Кулік Анатолій Степанович, Дергачов Володимир Андрійович
МПК: G06F 15/177
Мітки: процесор, адаптивний, діагностичний
Формула / Реферат:
Адаптивний діагностичний процесор, що містить групу інформаційних входів, блок пам'яті, двійковий лічильник, схему порівняння, елемент І, генератор, керуючий вхід, вихідну шину, причому керуючий вхід з'єднаний з першим входом елемента І, вихід генератора з'єднаний з другим входом елемента І, вихід якого з'єднаний з рахунковим входом двійкового лічильника, виходи двійкового лічильника з'єднані з першою групою входів блока пам'яті, який...
Адаптивний пристрій для вимірювального контролю несинхронності обертання роторів силових електричних машин
Номер патенту: 31827
Опубліковано: 25.04.2008
Автори: Васілевський Олександр Миколайович, Кравець Олег Миколайович
МПК: G01P 3/00
Мітки: адаптивний, машин, силових, роторів, електричних, контролю, пристрій, обертання, вимірювального, несинхронності
Формула / Реферат:
Адаптивний пристрій для вимірювального контролю несинхронності обертання роторів силових електричних машин, який складається з двох частотних регуляторів, двох силових електричних машин, двох датчиків кутової швидкості, задавача частот обертання силових електричних машин, суматора та блока обробки інформації, один з входів якого з'єднано з виходом першого датчика кутової швидкості, а вхід першого датчика кутової швидкості з'єднано з виходом...
Адаптивний діагностичний процесор
Номер патенту: 68788
Опубліковано: 16.08.2004
Автори: Охматенко Василь Павлович, Прохоров Віктор Олексійович, Кошовий Микола Дмитрович, Дергачов Володимир Андрійович, Єлізєв В'ячеслав Михайлович
МПК: G06F 15/00
Мітки: адаптивний, процесор, діагностичний
Формула / Реферат:
Адаптивний діагностичний процесор містить групу інформаційних входів, три блоки пам'яті, двійковий лічильник, три схеми порівняння, елемент І, генератор, керуючий вхід, вихідну шину, елемент АБО, демультиплексор, блок тригерів, мультиплексор, причому керуючий вхід з'єднаний з першим входом елемента І, вихід генератора з'єднаний з другим входом елемента І, вихід якого з'єднаний з рахунковим входом двійкового лічильника, виходи двійкового...
Адаптивний діагностичний процесор
Номер патенту: 74995
Опубліковано: 15.02.2006
Автори: Кривцов Володимир Станіславович, Кулік Анатолій Степанович
МПК: G06F 9/00, G06F 15/00, H04B 17/00
Мітки: діагностичний, адаптивний, процесор
Формула / Реферат:
Адаптивний діагностичний процесор, що містить групу Інформаційних входів, три блоки пам'яті, двійковий лічильник, три схеми порівняння, елемент І, генератор, керуючий вхід, вихідну шину, елемент АБО, демультиплексор, блок тригерів, мультиплексор, причому керуючий вхід з'єднаний з першим входом елемента І, вихід генератора з'єднаний з другим входом елемента І, вихід якого з'єднаний з лічильним входом двійкового лічильника, виходи двійкового...
Попередній патент: Термоелектричне джерело живлення для автомобіля
Наступний патент: Невибухова руйнуюча суміш
Випадковий патент: Спосіб розвантаження вагона