Система управління електромагнітним клапаном газорозподільного механізму двигуна внутрішнього згоряння
Номер патенту: 102802
Опубліковано: 12.08.2013
Автори: Топчій Сергій Іванович, Атаманенко Микола Євгенович, Боженко Антон Валерійович





Формула / Реферат
Система управління електромагнітним клапаном газорозподільного механізму двигуна внутрішнього згоряння, яка включає електронний блок керування (контролер), що отримує сигнали від датчика обертів колінчастого вала і електромагнітної форсунки впорскування палива в циліндр двигуна, яка відрізняється тим, що контролер виконаний на основі логічної мікросхеми з можливістю альтернативного корегування алгоритмом управління за результатами, отриманими в ході роботи двигуна і перепрограмування логічної мікросхеми, і включає блок аналогової обробки інформації, який сприймає сигнали від датчиків колінчастого і розподільного валів і має два ідентичних канали обробки сигналів від датчиків з двома буферними підсилювачами та двома компараторами з перетворенням аналогового сигналу в цифровий з одночасним відсіканням завад з амплітудою 2 V, канал з колінчастого вала з'єднаний з 9-ти розрядним двійковим лічильником блока цифрової обробки інформації сигналу, сигнал з якого надходить на арифметично-логічний пристрій, а інший - прямо на вхід арифметично-логічного пристрою, в якому обробляється вхідний і формується вихідний сигнал, що надходить до силового блока, підсилюється і далі надходить до виконавчого пристрою.
Текст
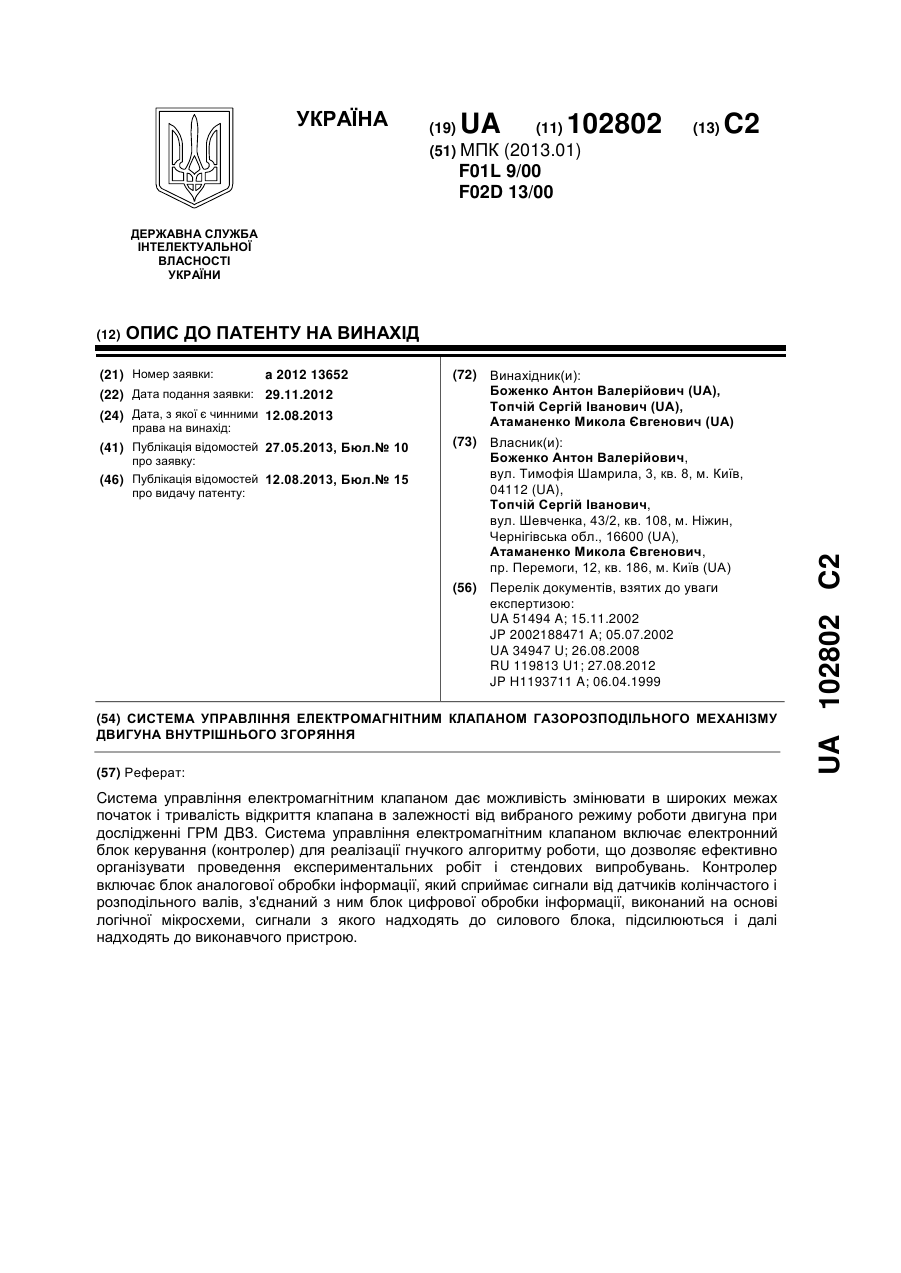
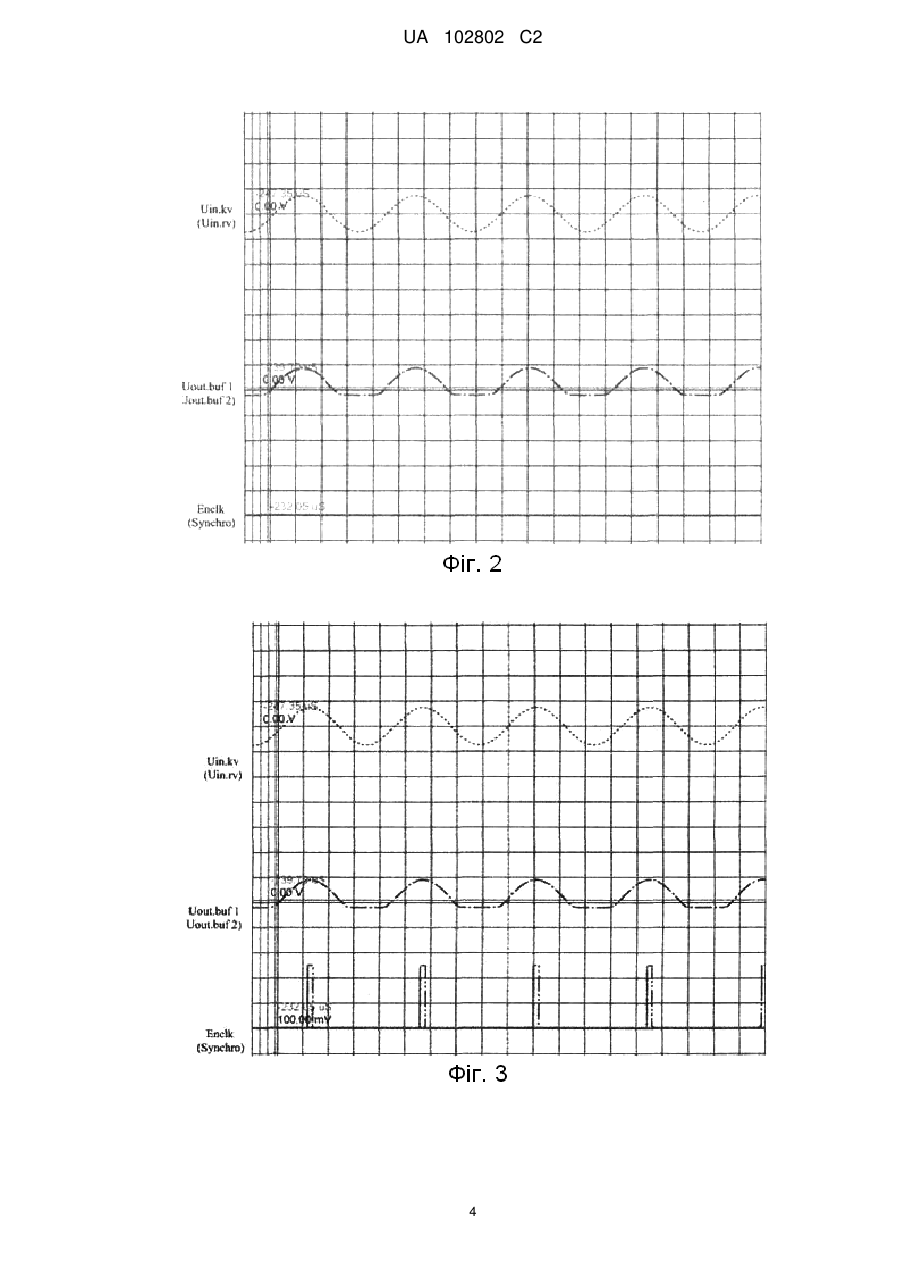
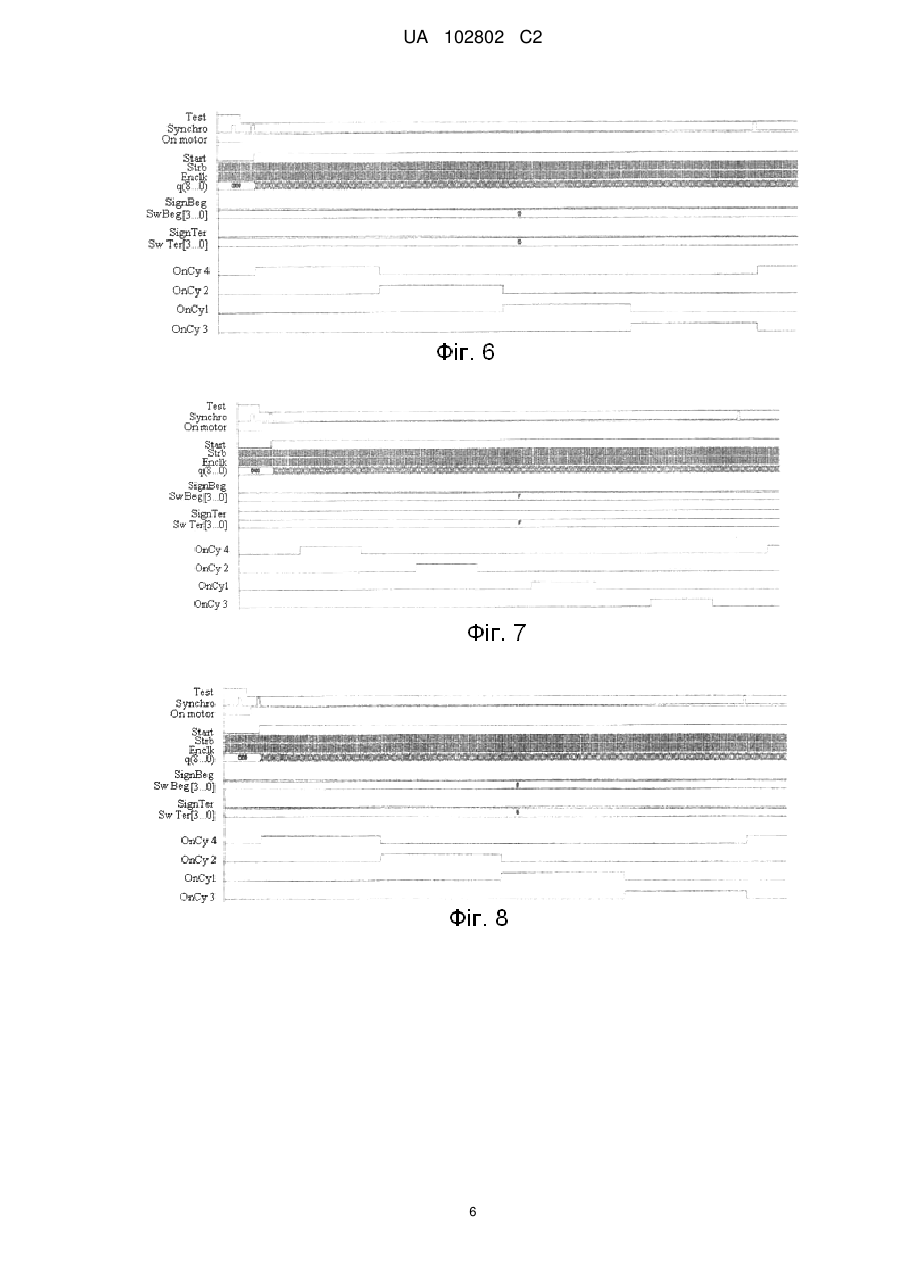
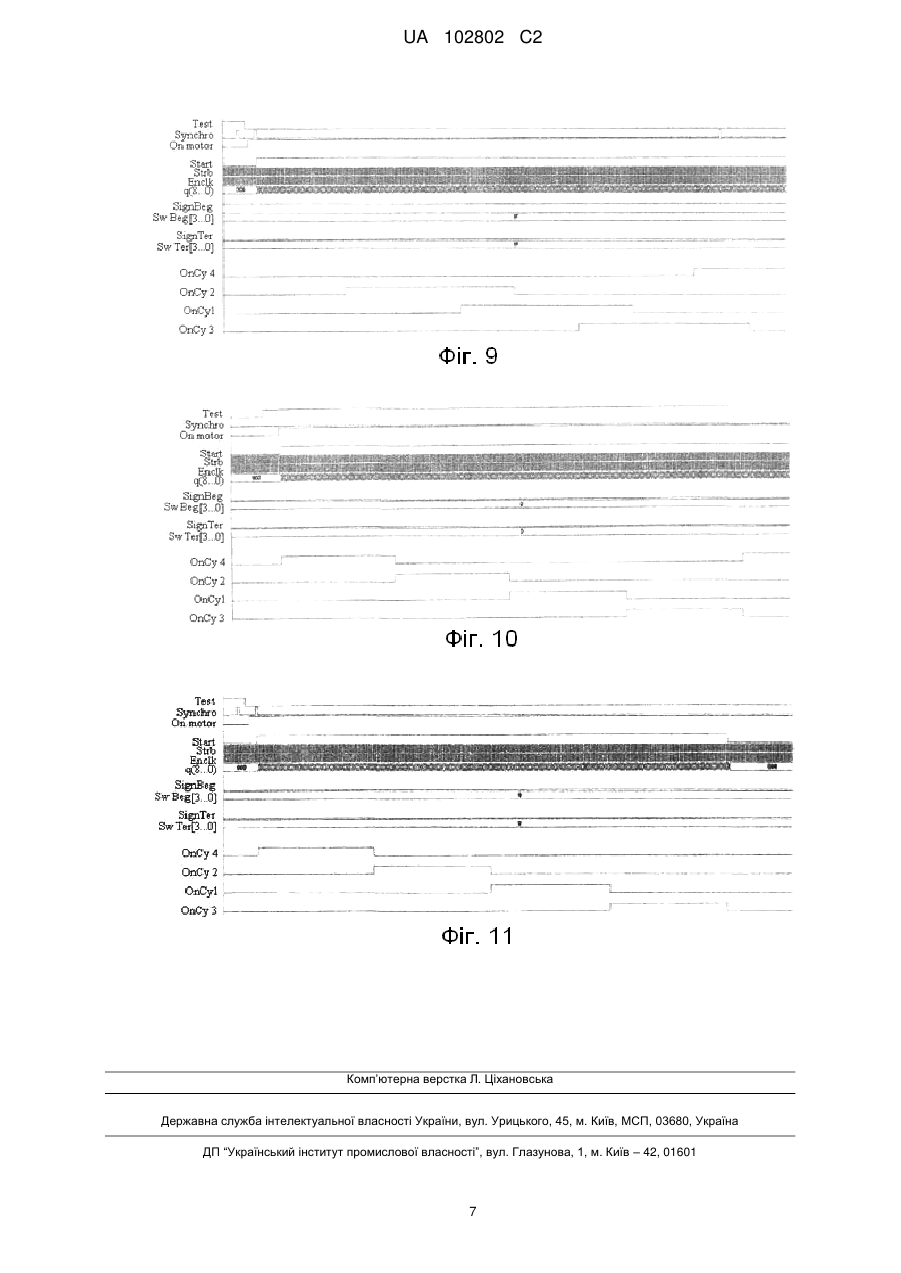
Реферат: Cистема управління електромагнітним клапаном дає можливість змінювати в широких межах початок і тривалість відкриття клапана в залежності від вибраного режиму роботи двигуна при дослідженні ГРМ ДВЗ. Cистема управління електромагнітним клапаном включає електронний блок керування (контролер) для реалізації гнучкого алгоритму роботи, що дозволяє ефективно організувати проведення експериментальних робіт і стендових випробувань. Контролер включає блок аналогової обробки інформації, який сприймає сигнали від датчиків колінчастого і розподільного валів, з'єднаний з ним блок цифрової обробки інформації, виконаний на основі логічної мікросхеми, сигнали з якого надходять до силового блока, підсилюються і далі надходять до виконавчого пристрою. UA 102802 C2 (12) UA 102802 C2 UA 102802 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до галузі машинобудування, зокрема до газорозподільного механізму (ГРМ) двигунів внутрішнього згоряння (ДВЗ) і може бути використана при дослідженні газорозподілу ДВЗ. Відомі системи управління ДВЗ, які дають можливість змінювати показники роботи механізмів (наприклад ГРМ) і систем двигуна (системи запалювання та впорскування палива) в залежності від режимів роботи, забезпечуючи при цьому оптимальні показники його потужності і економічності [Крайнюк А.И. Регулируемые системы газораспределения ДВС. Монография. Луганск: Изд-во СНУ им. В. Даля, 2006. - 232 с., Соснин Д.А. Новейшие автомобильные електронные системы. - М.: СОЛОН-Пресе, 2005. - 240 с.]. Недоліком цих систем є те, що вони розроблені для певних двигунів і їх досить складно використовувати при дослідженні роботи двигунів інших марок особливо, якщо вони обладнані експериментальними електрогідравлічним або електричним приводами клапанів ГРМ. Відома також система управління електромагнітним клапаном [Деклараційний патент на винахід № 51494 МПК G01N 1/22, G01М 15/00, F02B 71/00. Опубл. 15.11.2002, Бюл. № 11, 2002 р.], яка має електронний блок керування (контролер), що отримує сигнали від датчика обертів колінчастого вала і електромагнітної форсунки впорскування палива в циліндри двигуна. Недоліком цієї системи є те, що її неможливо використати для управління електромагнітними клапанами у двигунах які не обладнані системами впорскування палива. Крім того, така система не забезпечує роботу електромагнітного клапана в широких межах на всіх експлуатаційних режимах роботи двигуна від режиму запуску до максимальних обертів. Винаходом ставиться задача розробки системи управління електромагнітним клапаном яка дає можливість змінювати в широких межах початок і тривалість відкриття клапана в залежності від вибраного режиму роботи двигуна при дослідженні ГРМ ДВЗ. Поставлена задача вирішується тим, що в системі управління електромагнітним клапаном яка включає електронний блок керування (контролер), що отримує сигнали від датчика обертів колінчастого вала і електромагнітної форсунки впорскування палива в циліндри двигуна, згідно з винаходом, для реалізації гнучкого алгоритму роботи системи управління, що дозволяє ефективно організувати проведення експериментальних робіт і стендових випробувань контролер системи виконаний на основі логічної мікросхеми з можливістю програмування в процесі випробувань і включає блок аналогової обробки інформації, який сприймає сигнали від датчиків колінчастого і розподільного валів, з'єднаний з ним блок цифрової обробки інформації, сигнали з якого надходять до силового блока, підсилюються і надходять до виконавчого пристрою. Блок-схема контролера представлена на фіг. 1. До складу контролера входять такі функціональні блоки: блок аналогової обробки інформації, блок цифрової обробки інформації і силовий блок. Базова структура контролера розроблена в повній відповідності з вимогами до експериментального алгоритму управління виконавчими пристроями автомобільного двигуна клапанами ГРМ. На входи контролера подаються аналогові сигнали Uin.kv і Uin.rv з виходів індуктивних датчиків, встановлених на колінчастому і розподільному валах двигуна відповідно. Сигнали, що надходять на входи контролера проходять три етапи обробки: нормалізації по амплітуді і оцифровці - в блоці аналогової обробки; синхронізації роботи контролера з роботою ДВЗ і логічній обробці - в блоці цифрової обробки; гальванічної розв'язки і посилення сигналів управління виконавчими пристроями по потужності - в силовому блоці. Всі процедури обробки в аналоговому і цифровому блоках виконуються в реальному часі. Враховуючи той факт, що алгоритм є предметом дослідження, у структуру контролера включені елементи управління часовими і фазовими характеристиками сигналів управління виконавчими пристроями (реалізований проблемно-орієнтований інтерфейс користувача). Блок аналогової обробки має два ідентичні канали обробки сигналів Uin.kv і Uin.rv. Сигнали мають синусоїдальну форму, а їх частота залежить від числа обертів двигуна. Амплітуда сигналів - As може змінюватися в широких межах. З урахуванням реальних параметрів сигналів датчиків і вимог до вихідних сигналів аналогового блоку в кожному з каналів реалізовані наступні процедури аналогової обробки сигналів датчиків: узгодження вхідного опору аналогових каналів з вихідним опором індуктивних датчиків (буферні підсилювачі Buf 1 і Buf 2 з великим вхідним опором і коефіцієнтом передачі К = 1); 1 UA 102802 C2 5 10 15 20 25 30 35 40 45 50 55 нормалізація вхідних сигналів по амплітуді (діодно-резисторні обмежувачі на входах буферних підсилювачів. Амплітуда напруги на виходах буферних підсилювачів Uout.buf знаходиться в межах: -1 V Uin.kv (Uin.rv) Uin.kv (Uin.rv) > Ulev; фіг. 4 - Umax > Uin.kv (Uin.rv) > Ulev; фіг. 5 - Umax Ulev; Вихідні сигнали блока аналогової обробки Enclk і Synchro подаються на входи блока цифрової обробки. Блок цифрової обробки це основний блок контролера, в якому в процесі обробки в реальному часі оцифрованих сигналів датчиків Enclk, Synchro і сигналів інтерфейсу користувача On motor, Test, SignBeg, SwBeg, SignTer, SwTer формуються сигнали управління виконавчими пристроями On Су 1…On Су 4. В блоці цифрової обробки в елементному базисі логічної мікросхеми реалізований пристрій логічної обробки перерахованих вхідних сигналів і формування вихідних сигналів. Це арифметико-логічний пристрій з обмеженим набором функцій, достатнім для реалізації експериментального алгоритму управління клапанами. На фіг. 1 цей пристрій має позначення LPU. LPU запрограмоване на виконання таких функцій: синхронізація початкових фаз фізичного і віртуального робочих циклів мотора. Для формування віртуального робочого циклу в LPU використовуються оцифровані сигнали датчиків Enclk і Synchro. Ознакою наявності синхронізації є активний стан внутрішнього сигналу Start=fun(On motor, Test, Enclk, Synchro). Після переходу сигналу Start в активний стан починається виконання всіх запрограмованих логічних функцій; формування віртуального робочого циклу мотора. Основним елементом, що забезпечує реалізацію цієї функції є 9-ти розрядний двійковий лічильник СТ2, який також реалізований в елементному базисі логічної мікросхеми. Проміжок часу рівний tc=Tenclk x 258 відповідає часу виконання мотором одного робочого циклу. За станом вихідної шини лічильника q=fun (Start, Enclk, Synchro) визначається в якій робочій фазі знаходиться мотор в даний момент часу і які команди необхідно подати на виконавчі пристрої; обчислення положення фронтів і спадів сигналів On Су 1… On Су 4 на відрізку часу tc, по заданих оператором знака і величині зсуву фаз цих сигналів, щодо їх номінального положення. Зсув фронтів і спадів сигналів On Су здійснюється незалежно. Допускається зсовувати тільки фронт або тільки спад, або і фронт і спад одночасно. Напрям зсуву (вліво, управо) задається сигналами SignBeg і SignTer, а величина зсуву, сигналами SwBeg і SwTer. Максимальна величина зсуву в градусах рівна Shift = +/- 15 × 2,8. На діаграмах (фіг. 6…11) показана величина зсуву сигналів; формування сигналів управління виконавчими пристроями On Су. Сигнали On Су подаються на силовий блок. На фіг. 6…11 представлені діаграми вхідних і вихідних сигналів блока цифрової обробки: фіг. 6 режим - "Synchro" без зміщення фронтів: Sign В = 0; SwBeg=0; Sign T=0; SwTer=0; Test=0; фіг.7 режим - "Synchro-RL" з зміщенням фронтів: Sign В = 0; SwBeg=F; Sign T=1; SwTer=F; Test=0; фіг. 8 режим - "Synchro", без зміщення фронтів: Sign В = 0; SwBeg=0; Sign T=0; SwTer=0; Test=0; фіг. 9 режим - "Synchro-RL" з зміщенням фронтів: Sign В = 1; SwBeg=F; Sign T=0; SwTer=F; Test=0; фіг. 10 режим - "Test" tз зміщення фронтів: Sign В = 0; SwBeg=0; Sign T=0; SwTer=0; Test=1; фіг. 11 режим - "Synchro". Демонстрація аварійного припинення роботи у випадку відсутності імпульсів "Synchro". 2 UA 102802 C2 5 10 Призначення силового блока - підсилення сигналів On Су по потужності і передача їх до виконавчого пристрою. Розроблена система управління реалізує гнучкий алгоритм роботи контролера, що дозволяє ефективно організувати проведення експериментальних робіт і стендових випробувань. В процесі експлуатації, гнучкий алгоритм дозволить без додаткових матеріальних витрат і корегування (доопрацювання) внутрішньої конфігурації логічної мікросхеми настроювати в заданих межах роботу контролера з урахуванням розкиду характеристик кожного конкретного двигуна. Запропонована система дає можливість управління електрогідравлічним або електричним приводами клапанів ГРМ і іншими виконавчими механізмами, що здешевлює пристрої управління. ФОРМУЛА ВИНАХОДУ 15 20 25 Система управління електромагнітним клапаном газорозподільного механізму двигуна внутрішнього згоряння, яка включає електронний блок керування (контролер), що отримує сигнали від датчика обертів колінчастого вала і електромагнітної форсунки впорскування палива в циліндр двигуна, яка відрізняється тим, що контролер виконаний на основі логічної мікросхеми з можливістю альтернативного корегування алгоритмом управління за результатами, отриманими в ході роботи двигуна і перепрограмування логічної мікросхеми, і включає блок аналогової обробки інформації, який сприймає сигнали від датчиків колінчастого і розподільного валів і має два ідентичних канали обробки сигналів від датчиків з двома буферними підсилювачами та двома компараторами з перетворенням аналогового сигналу в цифровий з одночасним відсіканням завад з амплітудою 2 V, канал з колінчастого вала з'єднаний з 9-ти розрядним двійковим лічильником блока цифрової обробки інформації сигналу, сигнал з якого надходить на арифметично-логічний пристрій, а інший - прямо на вхід арифметично-логічного пристрою, в якому обробляється вхідний і формується вихідний сигнал, що надходить до силового блока, підсилюється і далі надходить до виконавчого пристрою. 3 UA 102802 C2 4 UA 102802 C2 5 UA 102802 C2 6 UA 102802 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for control of electromagnetic valve of gas-distribution mechanism of internal combustion engine
Автори англійськоюBozhenko Anton Valeriiovych, Topchii Serhii Ivanovych, Atamanenko Mykola Yevhenovych
Назва патенту російськоюСистема управления электромагнитным клапаном газораспределительного механизма двигателя внутреннего сгорания
Автори російськоюБоженко Антон Валериевич, Топчий Сергей Иванович, Атаманенко Николай Евгеньевич
МПК / Мітки
МПК: F01L 9/00, F02D 13/00
Мітки: внутрішнього, двигуна, згоряння, електромагнітним, управління, система, механізму, клапаном, газорозподільного
Код посилання
<a href="https://ua.patents.su/9-102802-sistema-upravlinnya-elektromagnitnim-klapanom-gazorozpodilnogo-mekhanizmu-dviguna-vnutrishnogo-zgoryannya.html" target="_blank" rel="follow" title="База патентів України">Система управління електромагнітним клапаном газорозподільного механізму двигуна внутрішнього згоряння</a>
Пристрій управління клапаном системи газорозподільного механізму двигуна внутрішнього згоряння
Номер патенту: 50629
Опубліковано: 15.10.2002
Автори: Войтюк Сергій Дмитрович, Топчій Сергій Іванович, Атаманенко Микола Євгенович, Філіппов Анатолій Захарович
МПК: F01L 9/00
Мітки: згоряння, управління, внутрішнього, пристрій, механізму, двигуна, газорозподільного, клапаном, системі
Формула / Реферат:
Пристрій управління клапаном газорозподільного механізму двигуна внутрішнього згоряння, що містить на одній осі два роз'єднаних міжпоршневою порожниною поршні, розташовані в розточці головки блока циліндрів, один з яких контактує з кулачком розподільного вала, а другий - з клапаном газорозподільного механізму, міжпоршнева порожнина за допомогою зворотного клапана з’єднана з напірною порожниною масляного насоса, який відрізняється тим, що...
Система керування приводом клапана газорозподільного механізму двигуна внутрішнього згоряння (двз)
Номер патенту: 24481
Опубліковано: 10.07.2007
Автори: Філіппов Анатолій Захарович, Герасимчук Юрій Анатолійович, Топчій Сергій Іванович, Мягков Валерій Іванович
МПК: F01N 9/00, F02D 45/00, F01L 9/04
Мітки: приводом, керування, двигуна, газорозподільного, згоряння, клапана, внутрішнього, механізму, система, двз
Формула / Реферат:
Система керування приводом клапана газорозподільного механізму двигуна внутрішнього згоряння (ДВЗ), що містить електромагнітний привід клапана механізму газорозподілу двигуна, який має два електромагніти, якір яких жорстко закріплений на стержні клапана, та дві допоміжні пружини, що мають можливість встановлення його в середнє положення, яка відрізняється тим, що привід має один верхній утримувальний електромагніт з переміщенням клапана у...
Електромагнітний привід клапанів газорозподільного механізму двигуна внутрішнього згоряння (двз)
Номер патенту: 89434
Опубліковано: 25.01.2010
Автори: Топчій Сергій Іванович, Філіппов Анатолій Захарович, Атаманенко Микола Євгенович
МПК: F01L 9/04
Мітки: клапанів, газорозподільного, двз, двигуна, електромагнітний, привід, механізму, згоряння, внутрішнього
Формула / Реферат:
Електромагнітний привід клапанів газорозподільного механізму двигуна внутрішнього згоряння, що містить магнітопровід, внутрішня частина якого виконана у вигляді подовженої напрямної з різьбою, на яку встановлено зубчасту шестірню, що входить в зачеплення з черв'ячною шестірнею вала крокового двигуна, якір електромагніта з конусом у верхній частині для регулювання ходу клапана і систему керування, який відрізняється тим, що електромагніт...
Електромагнітний привід клапанів газорозподільного механізму двигуна внутрішнього згоряння
Номер патенту: 79982
Опубліковано: 10.08.2007
Автори: Атаманенко Микола Євгенович, Топчій Сергій Іванович, Панченко Михайло Іванович, Філіппов Анатолій Захарович, Синявський Микола Володимирович
МПК: F01L 9/04
Мітки: внутрішнього, газорозподільного, двигуна, клапанів, механізму, згоряння, електромагнітний, привід
Формула / Реферат:
Електромагнітний привід клапанів газорозподільного механізму двигуна внутрішнього згоряння, що містить магнітопровід з встановленою обмоткою електромагніта на кожний клапан, якір, жорстко з'єднаний з штоком клапана, та систему керування, який відрізняється тим, що внутрішня частина магнітопроводу виконана у вигляді подовженої напрямної, на верхній частині якої нарізана різьба, на яку встановлено зубчасте колесо, що входить в зачеплення з...
Гідравлічний привод клапанів газорозподільного механізму двигуна внутрішнього згоряння
Номер патенту: 101563
Опубліковано: 10.04.2013
Автори: Топчій Ірина Сергіївна, Топчій Сергій Іванович, Топчій Святослав Сергійович
МПК: F01L 9/00
Мітки: гідравлічний, газорозподільного, привод, внутрішнього, механізму, клапанів, згоряння, двигуна
Формула / Реферат:
Гідравлічний привод клапанів газорозподільного механізму двигуна внутрішнього згоряння, який містить розподільний вал, з кулачком якого контактує верхній поршень, нижній поршень, який контактує з клапаном газорозподільного механізму, гідроакумулятор, приєднаний до міжпоршневої порожнини, і дозатор, який змінює кількість робочої рідини, що надходить від верхнього до нижнього поршнів, змінюючи хід клапанів, який відрізняється тим, що має...
Попередній патент: Спосіб іннервації нейрогенного сечового міхура
Наступний патент: Штам lactobacillus plantarum як антагоніст маслянокислого бродіння в твердих сичужних сирах
Випадковий патент: Спосіб спалювання твердого палива у розчині