Спосіб перетворення часового зсуву між двома сигналами та пристрій для його реалізації
Номер патенту: 112031
Опубліковано: 11.07.2016
Автори: Погребенник Володимир Дмитрович, Політило Роман Володимирович
Формула / Реферат
1. Спосіб перетворення часового зсуву між двома сигналами, який полягає у параллельному перетворенні миттєвих значень вхідних сигналів шляхом відслідковування їх до досягнення максимального значення, запам'ятовування на заданий час, паралельному інтегруванні перетворених сигналів протягом часу, більшого тривалості фронтів і очікуваної тривалості між сигналами, інвертуванні перетворених сигналів, масштабному перетворенні за амплітудою та їх інтегруванні, формуванні початку і закінченні вихідних часових інтервалів при досягненні інтегрованими сигналами нульових рівнів, а також визначенні послідовності надходження вхідних сигналів, який відрізняється тим, що здійснюють багаторазову затримку другого перетвореного сигналу, причому максимальний час затримки не перевищує тривалості плоскої вершини перетвореного сигналу, паралельно інтегрують затримані сигнали, інвертують їх, масштабно перетворюють за амплітудою та інтегрують, формують закінчення часових інтервалів при досягненні інтегрованими сигналами нульових рівнів, визначають суму часових інтервалів і часових затримок, а часовий зсув між двома сигналами визначається за формулою:
![]() ,
,
де: ![]() - часовий зсув між сигналами,
- часовий зсув між сигналами,
![]() - вихідний часовий інтервал після кожного такту затримки,
- вихідний часовий інтервал після кожного такту затримки,
![]() - коефіцієнт масштабного перетворення,
- коефіцієнт масштабного перетворення,
![]() - час затримки,
- час затримки,
![]() - кількість тактів затримки.
- кількість тактів затримки.
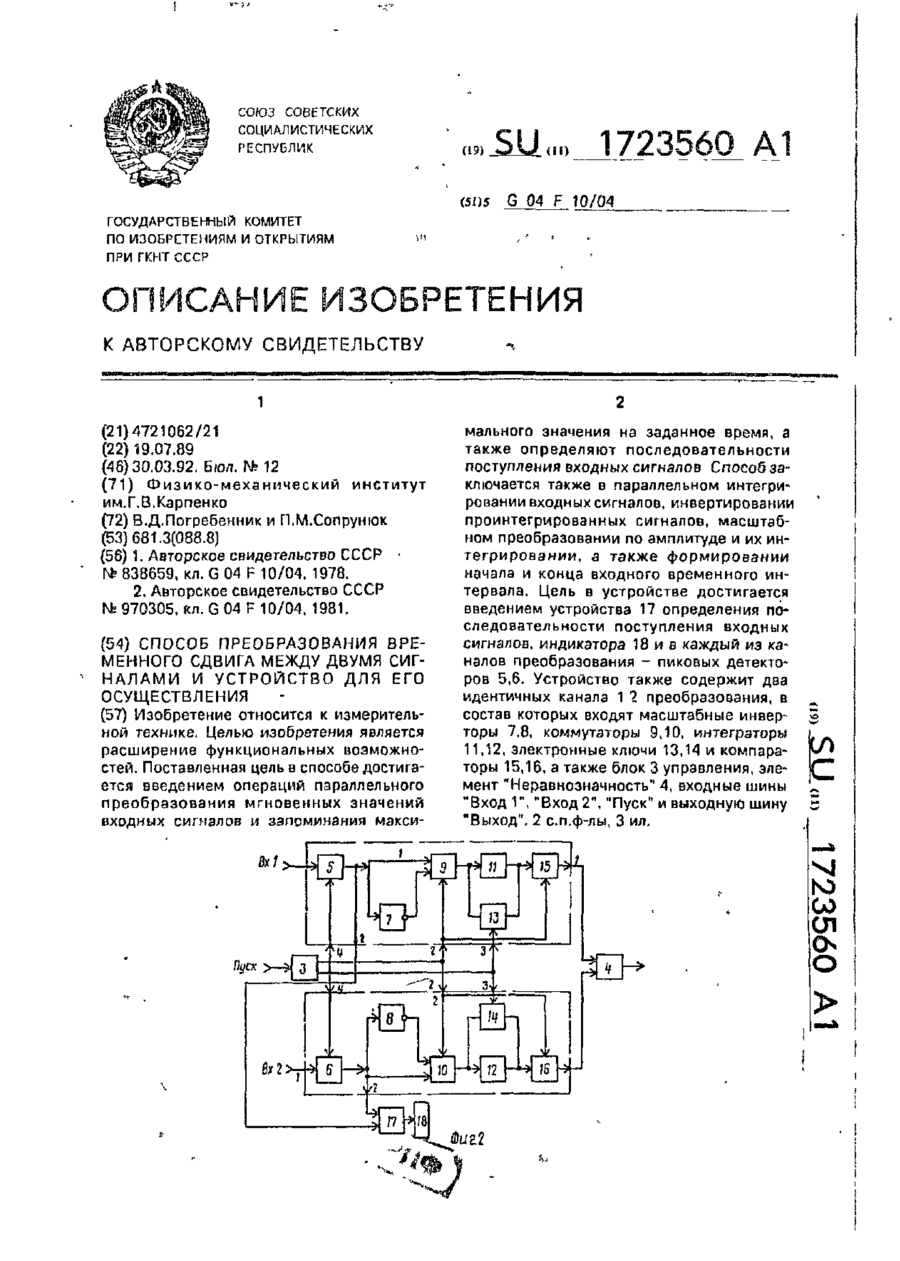
2. Пристрій для перетворення часового зсуву між двома сигналами, який містить два ідентичні канали перетворення, до складу кожного з яких входять масштабний інвертор, комутатор, інтегратор, електронний ключ і компаратор, причому вхід масштабного інвертора з'єднано з першим входом комутатора, другий вхід якого підключено до виходу масштабного інвертора, а вихід з'єднано зі входом інтегратора і першим входом електронного ключа, виходи яких підключено до першого входу компаратора, другий вхід з'єднано з третім входом електронного ключа і другим входом каналу перетворення, а вихід підключено до першого виходу каналу перетворення, третій вхід якого з'єднано з другим входом електронного ключа, блок керування, елемент "Нерівнозначність", вхідні шини "Вхід 1", "Вхід 2", "Пуск" і вихідну шину "Вихід 1", яку підключено до першого виходу елемента "Нерівнозначність", перший і другий входи якого з'єднано з першими виходами першого і другого каналів перетворення, другі входи підключено до першого виходу блока керування, другий вихід якого з'єднано з третіми входами першого і другого каналів перетворення, перші входи яких підключено до шин "Вхід 1" і "Вхід 2" відповідно, а вхід блока керування з'єднано з шиною "Пуск", а також два пікові детектори, причому входи пікових детекторів є входами пристрою, та пристрій визначення послідовності вхідних сигналів, індикатор, який відрізняється тим, що додатково введено m-канальний блок багаторазової часової затримки, блок m ідентичних каналів перетворення, блок m елементів "Нерівнозначність", третій і четвертий комутатори, m вихідних шин "Вихід", причому перший піковий детектор послідовно з'єднано з третім комутатором, першим каналом перетворення і першим входом пристрою для визначення послідовності надходження вхідних сигналів, другий піковий детектор послідовно з'єднано з другим каналом перетворення та другим входом пристрою для визначення послідовності надходження вхідних сигналів, вихід четвертого комутатора з'єднано з входом блока багаторазової часової затримки, виходи якого з'єднано, відповідно, зі входами блока m ідентичних каналів перетворення, виходи якого підключено до других входів блока m елементів "Нерівнозначність", перші входи якого з'єднано з виходом компаратора першого каналу перетворення, виходи блока m елементів "Нерівнозначність є m вихідними шинами "Вихід", другі входи блока m ідентичних каналів перетворення підключено до першого виходу блока керування, другий вихід якого з'єднано з третіми входами блока m ідентичних каналів перетворення.
Текст
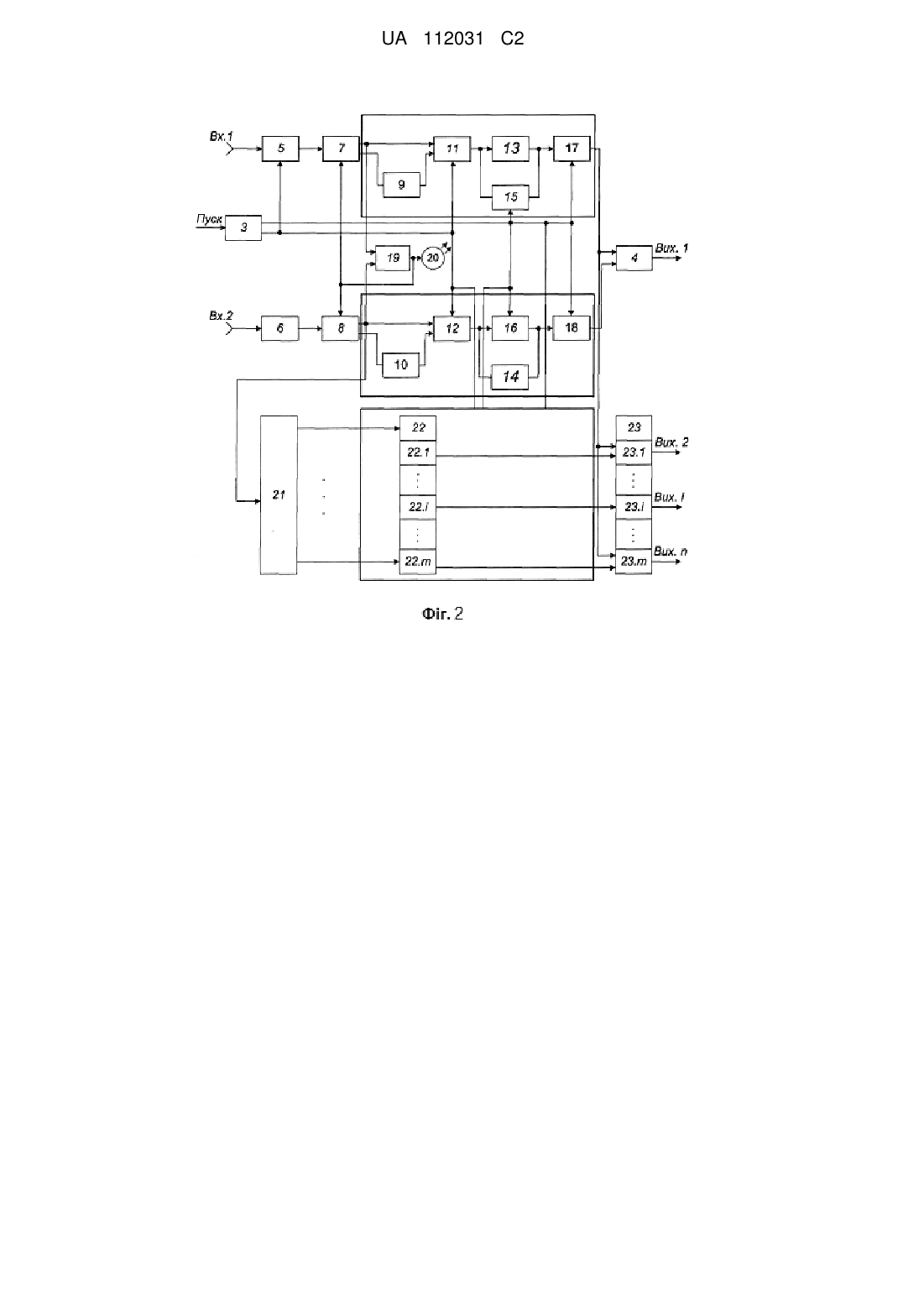
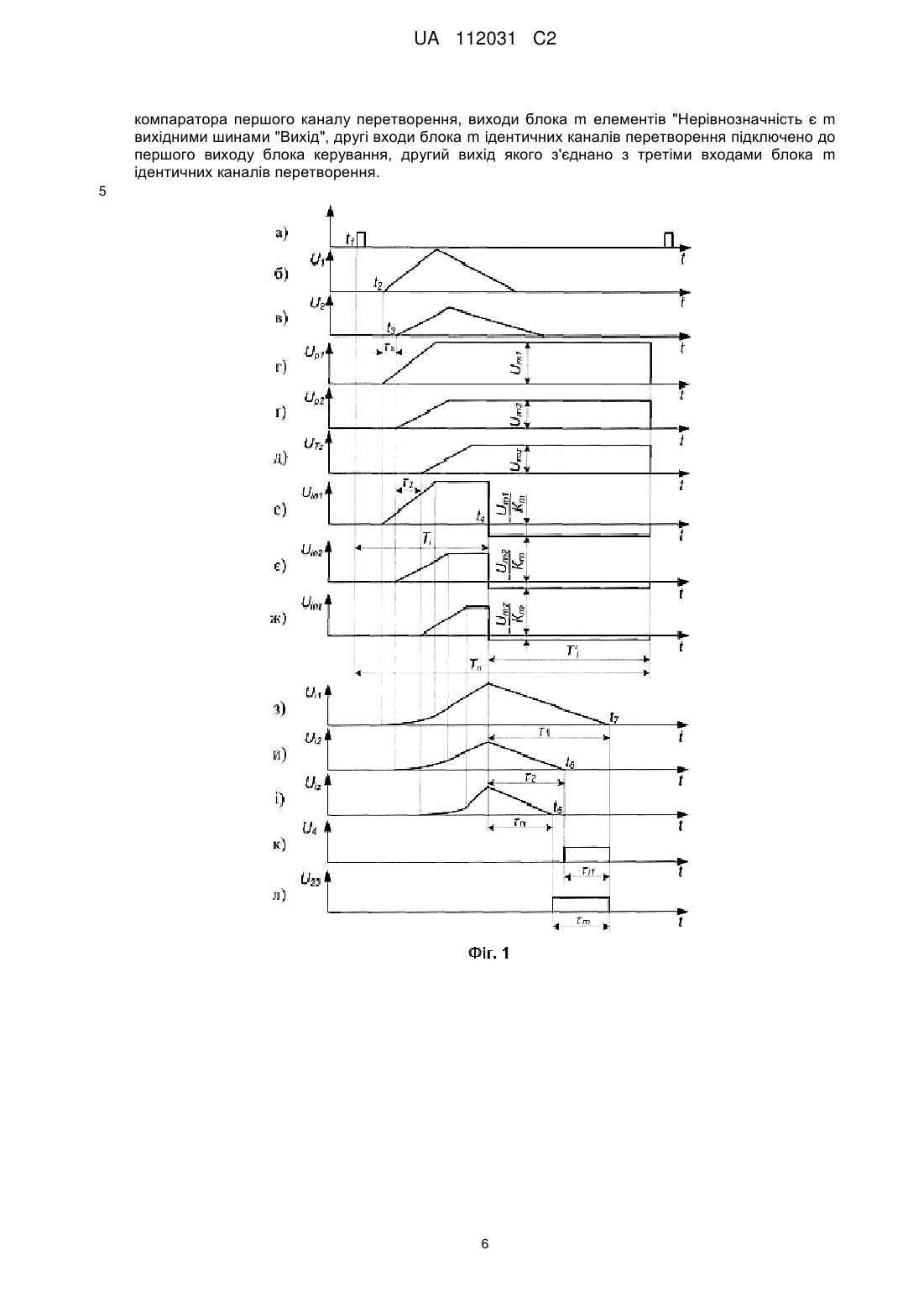
Реферат: Спосіб перетворення часового зсуву між двома сигналами та пристрій для його реалізації належить до вимірювальної техніки і призначений для перетворення часового зсуву між двома сигналами. Спосіб полягає у параллельному перетворенні миттєвих значень вхідних імпульсних сигналів і запам'ятовуванні максимального значення на заданий час, багаторазовій затримці другого перетвореного сигналу, причому максимальний час затримки не перевищує тривалості плоскої вершини перетвореного сигналу, паралельному інтегруванні перетворених і затриманих сигналів, інвертуванні їх, масштабному перетворенні за амплітудою, інтегруванні та формуванні початку і закінченні часових інтервалів, визначенні послідовності надходження вхідних сигналів, а також визначенні суми часових інтервалів і часових затримок, а часовий зсув між двома сигналами визначається за формулою: Tx 1 i m Tiv / K mTz , де: Tx - часовий m 1 i0 зсув між сигналами, Tiv - вихідний часовий інтервал після кожного такту затримки, K коефіцієнт масштабного перетворення, Tz - час затримки, m - кількість тактів затримки. Спосіб реалізується пристроєм, що містить (m+2) ідентичні канали перетворення, до складу кожного з яких входять масштабний інвертор, комутатори, інтегратор, електронний ключ і компаратор, а також два пікові детектори, пристрій визначення послідовності вхідних сигналів, індикатор, mканальний блок багаторазової часової затримки, блок m елементів "Нерівнозначність", вхідні шини "Вхід 1", "Вхід 2", (m+1) вихідні шини "Вихід", "Пуск". Технічним результатом є підвищення точності перетворення за рахунок збільшення у m разів кількості вимірювань та виконання операції m-разового інтегрування випадкових завад, наявних на вході пристрою, і усереднення результатів. UA 112031 C2 (12) UA 112031 C2 UA 112031 C2 5 10 15 20 25 30 35 40 Винахід належить до вимірювальної техніки і може бути використаний для визначення часових зсувів між двома сигналами. Відомий спосіб перетворення часового зсуву між двома сигналами (патент України на винахід № 11443, МКВ GO IF 10/04. Спосіб перетворення часового зсуву між двома сигналами та пристрій для його реалізації. - Опубл. 25.12.1996. Бюл. № 4), який полягає в паралельному перетворенні миттєвих значень вхідних сигналів шляхом відслідковування їх значень до досягнення максимального значення, запам'ятовуванні на заданий час, паралельному їх інтегруванні протягом часу, більшого тривалості фронтів та очікуваної тривалості між сигналами, інвертуванні проінтегрованих сигналів, масштабному перетворенні за амплітудою та їх інтегруванні, формуванні початку та закінченні вихідного часового інтервалу при досягненні інтегрованим сигналом нульового рівня, а також визначають послідовність надходження вхідних сигналів. Однак цей відомий спосіб має низьку точність. Пристрій для реалізації такого способу (патент України на винахід № 11443, МКВ G04F 10/04. Спосіб перетворення часового зсуву між двома сигналами та пристрій для його реалізації. Опубл. 25.12.1996. Бюл. № 4) містить два ідентичні канали перетворення, блок керування і логічний елемент "Нерівнозначність", пристрій визначення послідовності надходження вхідних сигналів та індикатор. Канали перетворення включають два пікові детектори, два масштабні інвертори, два комутатори, два інтегратори, два електронні ключі, два компаратори. Входи пікових детекторів є входами пристрою. Кожний піковий детектор з'єднано з масштабним інвертором, компаратором і входом пристрою для визначення послідовності надходження вхідних сигналів. Кожний комутатор послідовно з'єднано з інтегратором, компаратором. Виходи компараторів з'єднано з блоком керування, а пристрій для визначення послідовності надходження вхідних сигналів - з індикатором. Блок керування з'єднано одним виходом з піковими детекторами та електронними ключами, а другим виходом з комутаторами та компараторами. Електронні ключі підключено до входів і виходів інтеграторів. Однак цей відомий пристрій має низьку точність. В основу винаходу поставлено задачу створити спосіб та пристрій для перетворення часового зсуву між двома сигналами, в якому введення нових зв'язків та блоків дає змогу підвищити точність перетворення. Поставлена задача вирішується введенням операцій багаторазової затримки другого перетвореного сигналу, причому максимальний час затримки не перевищує тривалості плоскої вершини перетвореного імпульсу. Спосіб полягає в паралельному перетворенні миттєвих значень вхідних імпульсних сигналів і запам'ятовуванні максимального значення на заданий час, паралельному інтегруванні перетворених і затриманих сигналів, інвертуванні, масштабному перетворенні за амплітудою, інтегруванні їх та формуванні початку і закінченні часових інтервалів, визначенні суми часових інтервалів і часових затримок, а часовий зсув між двома сигналами визначається за формулою Tx де: 1 i m Tiv / K mTz , (1) m 1 i0 Tx - часовий зсув між сигналами; Tiv - вихідний часовий інтервал після кожного такту 45 50 55 затримки; K - коефіцієнт масштабного перетворення; Tz - інтервал часу одного такту затримки; m - кількість тактів затримки. Це дасть змогу суттєво підвищити точність перетворення часового зсуву внаслідок збільшення у m разів кількості вимірювань сигналів, виконання операції інтегрування випадкових завад і усереднення результатів. Поставлена задача вирішується тим, що у пристрій для перетворення часового зсуву між двома імпульсними сигналами, який містить два ідентичні канали перетворення, до складу кожного з яких входять масштабний інвертор, комутатор, інтегратор, електронний ключ і компаратор, причому вхід масштабного інвертора з'єднано з першим входом комутатора, другий вхід якого підключено до виходу масштабного інвертора, а вихід з'єднано зі входом інтегратора і першим входом електронного ключа, виходи яких підключено до першого входу компаратора, другий вхід з'єднано з третім входом електронного ключа і другим входом каналу перетворення, а вихід підключено до першого виходу каналу перетворення, третій вхід якого з'єднано з другим входом електронного ключа, блок керування, елемент "Нерівнозначність", вхідні шини "Вхід 1", "Вхід 2", "Пуск" і вихідну шину "Вихід 1", яку підключено до першого до виходу елемента "Нерівнозначність", перший і другий входи якого з'єднано з першими виходами 1 UA 112031 C2 5 10 15 20 25 30 35 першого і другого каналів перетворення, другі входи підключено до першого виходу блока керування, другий вихід якого з'єднано з третіми входами першого і другого каналів перетворення, перші входи яких підключено до шин "Вхід 1" і "Вхід 2" відповідно, а вхід блока керування з'єднано з шиною "Пуск", а також два пікові детектори, причому входи пікових детекторів є входами пристрою, пристрій визначення послідовності вхідних сигналів, індикатор, згідно з винаходом, він додатково містить m -канальний блок часової затримки, блок m ідентичних каналів перетворення, блок m елементів "Нерівнозначність", двох комутаторів, m вихідних шин "Вихід", причому перший піковий детектор послідовно з'єднано з першим комутатором, першим каналом перетворення і першим входом пристрою для визначення послідовності надходження вхідних сигналів, другий піковий детектор послідовно з'єднано з другим каналом перетворення та другим входом пристрою для визначення послідовності надходження вхідних сигналів, вихід другого комутатора з'єднано з входом багатоканального блока часової затримки, виходи якого з'єднано зі входами блока m ідентичних каналів перетворення, виходи якого підключено до других входів блока m елементів "Нерівнозначність", перші входи якого з'єднано з виходом компаратора першого каналу перетворення, виходи блока m елементів "Нерівнозначність є m вихідними шинами "Вихід". На фіг. 1 подано часові діаграми роботи пристрою, де: на фіг. 2 - структурну схему пристрою для перетворення часового зсуву між двома сигналами, на фіг. 3 - електричну структурну схему пристрою для визначення послідовності надходження сигналів, де: а) - запуск пристрою; б), в) вхідні сигнали; г), ґ) - відслідковування вхідних сигналів до досягнення максимального значення і запам'ятовування цього значення на певний заданий час; д) - затриманий перетворений сигнал; є), є), ж) - інвертовані перетворені сигнали; з), и), і) - інтегровані сигнали; к) - вихідний інтервал i ; л) - вихідний інтервал m ; (фіг. 2) - ідентичні канали 1 і 2 перетворення, блок керування 3, елемент "Нерівнозначність" 4, пікові детектори 5 і 6, комутатори 7 і 8, масштабні інвертори 9 і 10, комутатори 11 і 12, інтегратори 13 і 14, електронні ключі 15, 16, компаратори 17, 18, пристрій 19 визначення послідовності надходження вхідних сигналів, індикатор 20, блок 21 затримки, m-канальний блок 22 перетворення, m-канальний блок 23 перетворення в код; (фіг. 3) - компаратори 24 і 25, логічні інвертори 26 і 27, елементи I 28 і 29, елемент АБО 30 і Dтригер 31. Суть запропонованого способу полягає у наступному. Вхідні сигнали U1t і U2 t (фіг. 1, б, в), які мають наприклад, трикутну форму, паралельно перетворюються у сигнали трапецоїдної форми Up1t і Up2 t . Це здійснюється шляхом відслідковування миттєвих значень вхідних сигналів до досягнення максимального значення і запам'ятовування цього значення протягом заданого часу (фіг. 1, г, ґ, д). Перетворені сигнали паралельно інтегруються протягом часу, більшого тривалості фронтів і очікуваної тривалості між сигналами (фіг. 1, з, и, і): Ti Ui1t K1 Up1t dt , (2) 0 Ti Ui2 t K 2 Up2 t Tx dt , (3) 0 Ti Uizt K i Upz t Tx Tz dt , (4) 0 40 де Ui1 , ui2 , Uiz - напруги, отримані відповідно при інтегруванні першого, другого та затриманого перетворених сигналів; K 1 , K 2 , K i коефіцієнти передачі інтеграторів; K1 K 2 K i K ; Ti - час інтегрування; Tx - вимірюваний часовий зсув. Одночасно визначається послідовність надходження вхідних сигналів U1t і U t . Потім інвертують кожний з перетворених вхідних сигналів і масштабують їх в однакове K m число разів (фіг. 1, є, є, ж): Uin1 Um1 / K m , (4) 2 45 Uin2 Um2 / Km , (5) Uinz Umz / K m , (6) 2 UA 112031 C2 де Uin1 , Uin2 , Uinz - напруги, отримані після інвертування і масштабного перетворення; Um1 , Um2 , Umz - амплітуди вхідних сигналів. 5 Напруги Uin1 , Uin2 та Umz інтегрують далі від напруг, отриманих при інтегруванні перетворених вхідних сигналів до моменту досягнення проінтегрованими напругами нульового рівня (фіг. 1, з, и, і). Інтервали часу, протягом яких здійснюється інтегрування інвертованих сигналів Uin1 , та Uin2 , відповідно рівні Ti K m Up1t dt 1 t 6 t 4 ; (7) 0 Um1 Ti K m Up2 t Tx dt 2 t 5 t 4 10 20 25 30 35 40 45 50 Um2 Інтервали часу 1 і 2 відповідають з масштабним коефіцієнтом K m інтегральному часу існування сигналів від їх початку до моменту часу t 4 Різниця цих інтервалів часу пропорційна інтегральному часовому зсуву між сигналами i 1 2 t 6 t 5 K mTx . (9) t7 15 . (8) 0 Початок вихідного інтервалу i формується у момент часу t 6 , а його кінець - у момент часу (фіг. 1, к), а вихідного інтервалу m - формується у момент часу t 5 , а його кінець - у момент часу t 7 (фіг. 1, л). При однакових формах вхідних сигналів і рівних тривалостях їх фронтів інтегральний часовий зсув і зсув, визначений на нульовому рівні, будуть давати однакові результати. Аналогічної сукупності операцій і елементів у відомих нам бібліографічних і патентних джерелах не виявлено. Тому запропоноване рішення, яке дозволяє досягнути поставленої мети - підвищення точності перетворення, має суттєві відмінності. Пристрій для перетворення часового зсуву між двома сигналами (фіг. 2) містить ідентичні канали 1 і 2 перетворення, блок керування 3, блок m елементів "Нерівнозначність" 4, пікові детектори 5 і 6, комутатори 7 і 8, масштабні інвертори 9 і 10, комутатори 11 і 12, інтегратори 13 і 14, електронні ключі 15, 16, компаратори 17, 18, пристрій 19 визначення послідовності надходження вхідних сигналів, індикатор 20, блок 21 затримки, m-канальний блок 22 перетворення, m-канальний блок 23 перетворення в код. Входи пікових детекторів 5 і 6 є входами пристрою. Піковий детектор 5 послідовно з'єднано з комутатором 7, масштабним інвертором 9, комутатором 11 і входом пристрою 19 для визначення послідовності надходження вхідних сигналів, а піковий детектор 6 послідовно з'єднано з комутатором 8, масштабним інвертором 10, комутатором 12 та другим входом пристрою 19. Вихід комутатора 8 з'єднано зі входом бока затримки 21, виходи якого приєднано, відповідно, до входів першого, …i-го та (m-го) каналів блока 22. Комутатор 12 послідовно з'єднано з інтегратором 14, компаратором 18. Виходи компараторів 17 і 18 з'єднано з блоком 4, виходи компараторів 17 і першого каналу перетворення, відповідно, з'єднано з першим та другим входами блока 23, а виходи компараторів 17 і m-го каналу перетворення, відповідно з'єднано з третім та m-им входом блока 23, а пристрій 19 - з індикатором 20. Блок керування з'єднано одним виходом з піковими детекторами 5 і 6 та електронними ключами 15, 16, першого, і-го та m-го каналу перетворення блока 22, а другим виходом - з комутаторами 7 і 8 та компараторами 17, 18 та компараторами першого, і-го та m-го каналу перетворення блока 22. Електронні ключі 15, 16, першого, і-го та mго каналу перетворення блока 22, підключено, відповідно, до входів і виходів інтеграторів 13, 14, першого, і-го та m-го каналу перетворення блока 22. Пристрій для визначення послідовності надходження вхідних сигналів містить компаратори 24 і 25, логічні інвертори 26 і 27, елементи І 28 і 29, елемент АБО 30 і D-тригер 31. Компаратор 24 з'єднано з елементом І 28 та логічним інвертором 27, а компаратор 25 - з елементом І 29 та інвертором 26. Інвертори 26 і 27 з'єднано з другими входами елементів І 28 та І 29, входи останніх підключено до елемента АБО 30. Елемент І 29 з'єднано зі входом D- тригера 31, а вхід С з'єднано з виходом елемента АБО 30. Вихід тригера підключено до індикатора 20. Пристрій працює так. 3 UA 112031 C2 5 У вихідному стані блок керування 3 утримує відкритими електронні ключі 15, 16, внаслідок чого інтегратори 13,14 розряджені до нульового рівня, а також забороняє спрацюванню пікових детекторів 5 і 6 та компараторів 17, 18 шляхом подачі сигналів на входи керування і на входи стробування. Особливістю блока керування 3 запропонованого пристрою є те, що запуск пристрою здійснюється до моменту надходження першого з вхідних сигналів. Цей момент часу t1 показано на фіг. 1, а. Імпульсом запуску блок 3 керування відкриває пікові детектори 5 і 6, закриває електронні ключі 15, 16, першого, i-го та m-го каналу блока 22 і підключає комутатори 7 і 8 до виходів пікових детекторів 5 і 6. У моменти часу t 2 і t 3 на входи пікових детекторів 5 і 6 10 15 20 25 30 35 40 45 50 55 надходять вхідні сигнали U1t і U2 t x (фіг. 1, б, в). Проводиться відслідковування вхідних сигналів пікових детекторів 5 і 6 до досягнення максимального значення і запам'ятовування цього значення на певний заданий час (фіг. 1, г, ґ). Одночасно проводиться визначення послідовності надходження вхідних сигналів. З цією метою вихідні сигнали пікових детекторів 5 і 6 подаються на комутатори 7 і 8. Вихідний сигнал коммутатора 7 надходить на компаратор 24. Вихідний сигнал компаратора 24 надходить на інвертор 27 і на перший вхід логічного елемента І 28. Вихідний сигнал коммутатора 8 надходить на компаратор 25, а вихідний сигнал компаратора 25 - на інвертор 26 і другий вхід логічного елемента I 29. На другий вхід логічного елемента I 28 надходить вихідний сигнал інвертора 26, а на перший вхід логічного елемента І 29 - вихідний сигнал інвертора 27. Вихідні сигнали логічних елементів І 28 та І 29 надходять на входи логічного елемента АБО 30, а вихідний сигнал логічного елемента І 29, крім того, надходить на D-вхід тригера 31, на вхід С якого надходить вихідний сигнал елемента АБО 30. Якщо по першому каналу вхідний сигнал надходить першим, то на виході елемента І 28 з'явиться логічна одиниця, на виході елемента І 29 - логічний нуль, і на виході D-тригера буде логічний нуль. Якщо по другому каналу вхідний сигнал надходить першим, то на виході елемента I 28 появиться логічний нуль, на виході елемента І 29 - логічна одиниця, а на виході D-тригера логічна одиниця. Вихідний сигнал пристрою 19 підключає блок затримки 21 через комутатори 7 або 8 до виходів пікових детекторів 5 або 6 (залежно по якому входу сигнал надійде першим). Потім проводиться паралельне інтегрування перетворених сигналів інтеграторами 13 і 14 з моменту часу t1 до моменту часу t 4 , позначеного як Ti , (фіг. 1, з, і). Час інтегрування Ti більший суми тривалості фронту вхідного сигналу та очікуваної тривалості між сигналами. У момент часу t 4 блок 3 підключає комутатори 11 і 12 до виходів масштабних інверторів 9 і 10 (фіг. 1, є, є) і дозволяє спрацювання компараторів 17 і 18. Інвертовані масштабно перетворені сигнали інтегруються від рівня, отриманого при інтегруванні неінвертованих перетворених сигналів, до досягнення моменту рівності вихідних напруг інтеграторів 13 і 14 нульовому рівню (фіг. 1, з, и). У моменти часу t 5 і t 6 на виходах компараторів 17 і 18 появляються робочі перепади напруги (фіг. 1, ї, л). Масштабний коефіцієнт K m вибирається так, щоб моменти t 5 і t 6 закінчення інтегрування наступили до закінчення плоскої вершини перетвореного сигналу. Вихідні сигнали компараторів 17 і 18 надходять на входи блока 4, який реалізує логічну функцію "Нерівнозначність", на виході якого отримують вихідний часовий інтервал i1 (фіг. 1, к), пропорційний інтегральному часовому зсуву між сигналами. За допомогою блока затримки 21 другий вхідний сигнал дискретно затримується на інтервали часу Tz :. Число тактів затримки дорівнює m . Затриманий вхідний сигнал інтегрують інтегратором першого каналу блока 22. Час інтегрування Ti більший суми тривалості фронту вхідного сигналу, очікуваної тривалості між сигналами та часу затримки. У момент часу t 4 блок 3 підключає комутатор першого каналу до виходу масштабного інвертора (фіг. 1, ж) і дозволяє спрацювання компаратора. Інвертований масштабно перетворений сигнали інвертується від рівня, отриманого при інтегруванні неінвертованого перетвореного сигналу, до досягнення моменту рівності вихідної напруги інтегратора цього каналу нульовому рівню (фіг. 1, і). У момент часу t 5 на виході компаратора появляються робочий перепад напруги (фіг. 1, л). Масштабний коефіцієнт K m вибирається так, щоб момент t 5 закінчення інтегрування наступив до закінчення плоскої вершини перетвореного сигналу. Вихідні сигнали компараторів 17 і першого каналу блока 22 надходять на перший та другий входи блока 23, який реалізує функцію "Нерівнозначність", на виході якого отримують вихідний часовий інтервал i2 (фіг. 1, к), пропорційний інтегральному часовому зсуву між сигналами та затримці між сигналами. Аналогічно працює пристрій в n-му такті роботи. 4 UA 112031 C2 Сума часових інтервалів i1 i, i2 … im буде пропорційна інтегральному часовому зсуву та часу затримки. Часовий зсув між двома сигналами визначається за формулою tx 5 1 i m Tiv / K mt z . (10) m 1 i 0 Отже, запропонований спосіб та пристрій характеризуються високою точністю внаслідок введення операцій багаторазової затримки другого перетвореного сигналу та збільшення у т разів кількості вимірювань сигналів. Унаслідок виконання операції багаторазового інтегрування випадкових завад, наявних на вході пристрою, і усереднення результатів, їх вплив на результат перетворення істотно зменшується в m t i t zm / 0 разів, де 0 - інтервал кореляції завад. 10 ФОРМУЛА ВИНАХОДУ 15 20 25 1. Спосіб перетворення часового зсуву між двома сигналами, який полягає у параллельному перетворенні миттєвих значень вхідних сигналів шляхом відслідковування їх до досягнення максимального значення, запам'ятовування на заданий час, паралельному інтегруванні перетворених сигналів протягом часу, більшого тривалості фронтів і очікуваної тривалості між сигналами, інвертуванні перетворених сигналів, масштабному перетворенні за амплітудою та їх інтегруванні, формуванні початку і закінченні вихідних часових інтервалів при досягненні інтегрованими сигналами нульових рівнів, а також визначенні послідовності надходження вхідних сигналів, який відрізняється тим, що здійснюють багаторазову затримку другого перетвореного сигналу, причому максимальний час затримки не перевищує тривалості плоскої вершини перетвореного сигналу, паралельно інтегрують затримані сигнали, інвертують їх, масштабно перетворюють за амплітудою та інтегрують, формують закінчення часових інтервалів при досягненні інтегрованими сигналами нульових рівнів, визначають суму часових інтервалів і часових затримок, а часовий зсув між двома сигналами визначається за формулою: Tx 30 35 40 45 50 55 1 i m Tiv / K mTz , m 1 i 0 де: Tx - часовий зсув між сигналами, Tiv - вихідний часовий інтервал після кожного такту затримки, K - коефіцієнт масштабного перетворення, Tz - час затримки, m - кількість тактів затримки. 2. Пристрій для перетворення часового зсуву між двома сигналами, який містить два ідентичні канали перетворення, до складу кожного з яких входять масштабний інвертор, комутатор, інтегратор, електронний ключ і компаратор, причому вхід масштабного інвертора з'єднано з першим входом комутатора, другий вхід якого підключено до виходу масштабного інвертора, а вихід з'єднано зі входом інтегратора і першим входом електронного ключа, виходи яких підключено до першого входу компаратора, другий вхід з'єднано з третім входом електронного ключа і другим входом каналу перетворення, а вихід підключено до першого виходу каналу перетворення, третій вхід якого з'єднано з другим входом електронного ключа, блок керування, елемент "Нерівнозначність", вхідні шини "Вхід 1", "Вхід 2", "Пуск" і вихідну шину "Вихід 1", яку підключено до першого виходу елемента "Нерівнозначність", перший і другий входи якого з'єднано з першими виходами першого і другого каналів перетворення, другі входи підключено до першого виходу блока керування, другий вихід якого з'єднано з третіми входами першого і другого каналів перетворення, перші входи яких підключено до шин "Вхід 1" і "Вхід 2" відповідно, а вхід блока керування з'єднано з шиною "Пуск", а також два пікові детектори, причому входи пікових детекторів є входами пристрою, та пристрій визначення послідовності вхідних сигналів, індикатор, який відрізняється тим, що додатково введено m-канальний блок багаторазової часової затримки, блок m ідентичних каналів перетворення, блок m елементів "Нерівнозначність", третій і четвертий комутатори, m вихідних шин "Вихід", причому перший піковий детектор послідовно з'єднано з третім комутатором, першим каналом перетворення і першим входом пристрою для визначення послідовності надходження вхідних сигналів, другий піковий детектор послідовно з'єднано з другим каналом перетворення та другим входом пристрою для визначення послідовності надходження вхідних сигналів, вихід четвертого комутатора з'єднано з входом блока багаторазової часової затримки, виходи якого з'єднано, відповідно, зі входами блока m ідентичних каналів перетворення, виходи якого підключено до других входів блока m елементів "Нерівнозначність", перші входи якого з'єднано з виходом 5 UA 112031 C2 компаратора першого каналу перетворення, виходи блока m елементів "Нерівнозначність є m вихідними шинами "Вихід", другі входи блока m ідентичних каналів перетворення підключено до першого виходу блока керування, другий вихід якого з'єднано з третіми входами блока m ідентичних каналів перетворення. 5 6 UA 112031 C2 Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G04F 10/04
Мітки: перетворення, спосіб, зсуву, часового, реалізації, сигналами, пристрій, двома
Код посилання
<a href="https://ua.patents.su/9-112031-sposib-peretvorennya-chasovogo-zsuvu-mizh-dvoma-signalami-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб перетворення часового зсуву між двома сигналами та пристрій для його реалізації</a>
Спосіб перетворення часового зсуву між двома сигналами та пристрій для його реалізації
Номер патенту: 11443
Опубліковано: 25.12.1996
Автори: Сопрунюк Петро Маркіянович, Погребенник Володимир Дмитрович
МПК: G04F 10/00
Мітки: спосіб, реалізації, перетворення, двома, сигналами, пристрій, зсуву, часового
Формула / Реферат:
1. Способ преобразования временного сдвига между двумя сигналами, заключающийся в параллельном интегрировании входных сигналов в течение времени, большего длительности фронтов и ожидаемой длительности между сигналами, инвертировании проинтегрированных сигналов, масштабном преобразовании по амплитуде и их интегрировании, формировании начала и конца входного временного интервала при достижении интегрируемым сигналом нулевого уровня,...
Спосіб аналого-цифрового перетворення і пристрій для його реалізації
Номер патенту: 89062
Опубліковано: 25.12.2009
Автори: Крупельницький Леонід Віталійович, Азаров Олексій Дмитрович, Кадук Олександр Володимирович
МПК: H03M 1/00
Мітки: спосіб, аналого-цифрового, перетворення, реалізації, пристрій
Формула / Реферат:
1. Спосіб аналого-цифрового перетворення, який полягає в тому, що на кожному і-му такті формують компенсуючий сигнал врівноваження і додатковий аналоговий сигнал та здійснюють їх порівняння з вхідним аналоговим сигналом, по результатах порівняння на всіх тактах здійснюють формування вихідного коду, який відрізняється тим, що основному режиму передує режим самокалібрування, під час якого визначають коди реальних значень ваг розрядів...
Спосіб аналого-цифрового перетворення і пристрій для його реалізації
Номер патенту: 94779
Опубліковано: 10.06.2011
Автори: Азаров Олексій Дмитрович, Захарченко Сергій Михайлович, Захарченко Михайло Григорович
Мітки: аналого-цифрового, перетворення, реалізації, пристрій, спосіб
Формула / Реферат:
1. Спосіб аналого-цифрового перетворення, який базується на застосуванні процесу перерозподілу заряду на конденсаторній матриці і складається з двох етапів: етапу калібрування старших, неточних розрядів перетворювача і етапу безпосереднього перетворення, який відрізняється тим, що процедуру калібрування здійснюють виключно в цифровій формі, для чого на вхід конденсатора, що калібрують, подають опорну напругу, далі відповідний заряд...
Пристрій для перетворення позиційного двійкового коду у лишки за двома довільними модулями
Номер патенту: 91894
Опубліковано: 25.07.2014
Автори: Горбенко Іван Дмитрович, Горбенко Юрій Іванович, Замула Олександр Андрійович, Янко Аліна Сергіївна, Краснобаєв Віктор Анатолійович
МПК: G06F 5/00
Мітки: модулями, позиційного, довільними, пристрій, перетворення, двома, коду, лишки, двійкового
Формула / Реферат:
Пристрій для перетворення позиційного двійкового коду у лишки за двома довільними модулями, що містить перший, другий і третій суматори, перший, другий і третій регістри, при цьому, перший (шина подачі значення позиційного двійкового коду) вхід пристрою підключено до першого входу першого регістра, перший вихід якого підключено до першого входу першого суматора, а також до перших входів другого та третього регістрів, а перший вихід першого...
Спосіб аналого-цифрового перетворення і пристрій для його реалізації
Номер патенту: 97687
Опубліковано: 12.03.2012
Автори: Решетнік Олександр Олександрович, Шабатура Максим Юрійович, Азаров Олексій Дмитрович
Мітки: аналого-цифрового, спосіб, перетворення, пристрій, реалізації
Формула / Реферат:
1. Спосіб аналого-цифрового перетворення, який полягає в тому, що на кожному і-му такті формують загальний компенсуючий сигнал врівноваження і здійснюють порівняння вхідного аналогового сигналу з сигналом врівноваження, за результатами порівняння на всіх тактах здійснюють формування вихідного коду надлишкової позиційної системи числення, який відрізняється тим, що на кожному такті перетворення незалежно від результату порівняння на...
Попередній патент: Спосіб оптимізації розведення хижих клопів із родини pentatomidae
Наступний патент: Система управління роботою двигуна внутрішнього згоряння із примусовим запалюванням, що працює на газовому паливі
Випадковий патент: Спосіб отримання желе