Спосіб роботи вузла для трансформування сільськогосподарського агрегату
Номер патенту: 114149
Опубліковано: 27.02.2017

Формула / Реферат
1. Спосіб роботи вузла для трансформування сільськогосподарського агрегату, який здійснюють шляхом переведення сільськогосподарського агрегату із вихідного робочого положення в транспортне положення і навпаки, з застосуванням гідравлічного впливу, тяглового впливу на елементи цього вузла, а також осьового обертання, який відрізняється тим, що процес переведення сільськогосподарського агрегату із вихідного робочого положення в транспортне положення здійснюють у дві стадії, а саме спочатку на першій стадії цього процесу гідравлічним впливом здійснюють одночасне повертання навколо горизонтальної осі на кут α=90° із вихідного робочого положення паралельно розташованих на одному горизонтальному рівні елемента, що керується гідравлічною системою, та з'єднаних з цим елементом з можливістю повертання та обертання елементів - елемента лівого крила сільськогосподарського агрегату та елемента правого крила сільськогосподарського агрегату, до кожного з яких закріплені робочі органи цього агрегату, до досягнення розташування елементів лівого крила та правого крила цього агрегату, до кожного з яких закріплені робочі органи цього агрегату, над елементом, що керується гідравлічною системою, і відповідно забезпечують вертикальне положення власних поворотно-обертальних осей кожного з елементів лівого крила та правого крила сільськогосподарського агрегату, при цьому залишається горизонтальним положення елемента, що керується гідравлічною системою, та елементів лівого крила сільськогосподарського агрегату та правого крила сільськогосподарського агрегату, до кожного з яких закріплені робочі органи цього агрегату, а потім на другій стадії тягловим впливом завдяки поступальному переміщенню вперед елемента, що керується гідравлічною системою, здійснюють одночасне обертання елемента лівого крила сільськогосподарського агрегату, до якого закріплені робочі органи, та обертання елемента правого крила сільськогосподарського агрегату, до якого закріплені робочі органи, навколо відповідної власної поворотно-обертальної осі у її вертикальному положенні, при цьому таке обертання кожного такого з елементів - елемента лівого крила сільськогосподарського агрегату та елемента правого крила сільськогосподарського агрегату здійснюють, починаючи з 0° до досягнення значення кута повороту β=87-95°, з можливістю зміни цього кута повороту β у процесі транспортування сільськогосподарського агрегату у межах від 40° до 140°, а переведення сільськогосподарського агрегату із транспортного положення у вихідне робоче положення здійснюють у зворотній послідовності також у дві стадії, а саме спочатку - на першій стадії тягловим впливом шляхом зворотного переміщення назад елемента, що керується гідравлічною системою, здійснюють обертання кожного з елементів лівого та правого крила сільськогосподарського агрегату, до кожного з яких закріплені робочі органи, навколо їх відповідної власної поворотно-обертальної осі, що знаходиться у вертикальному положенні, від значення кута повороту β=87-95° до досягнення значення цього кута 0°, після чого на другій стадії гідравлічним впливом здійснюють одночасне повертання на 90° навколо горизонтальної осі елемента, що керується гідравлічною системою, та елементів лівого крила сільськогосподарського агрегату та правого крила сільськогосподарського агрегату, до кожного з яких закріплені робочі органи, до досягнення розташування вихідного робочого положення елементів лівого та правого крила цього агрегату, до кожного з яких закріплені робочі органи, на одному горизонтальному рівні з елементом, що керується гідравлічною системою, та паралельно до нього.
2. Спосіб за п. 1, який відрізняється тим, що обертання елемента лівого крила сільськогосподарського агрегату, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі здійснюють у напрямку проти годинникової стрілки при переведенні сільськогосподарського агрегату із вихідного робочого положення в транспортне положення, і у напрямку обертання цього елемента за годинниковою стрілкою - при переведенні сільськогосподарського агрегату із транспортного положення у вихідне робоче положення.
3. Спосіб за п. 1, який відрізняється тим, що обертання елемента правого крила сільськогосподарського агрегату, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі здійснюють у напрямку за годинниковою стрілкою при переведенні сільськогосподарського агрегату із вихідного робочого положення в транспортне положення, і у напрямку обертання цього елемента проти годинникової стрілки - при переведенні сільськогосподарського агрегату із транспортного у вихідне робоче положення.
Текст
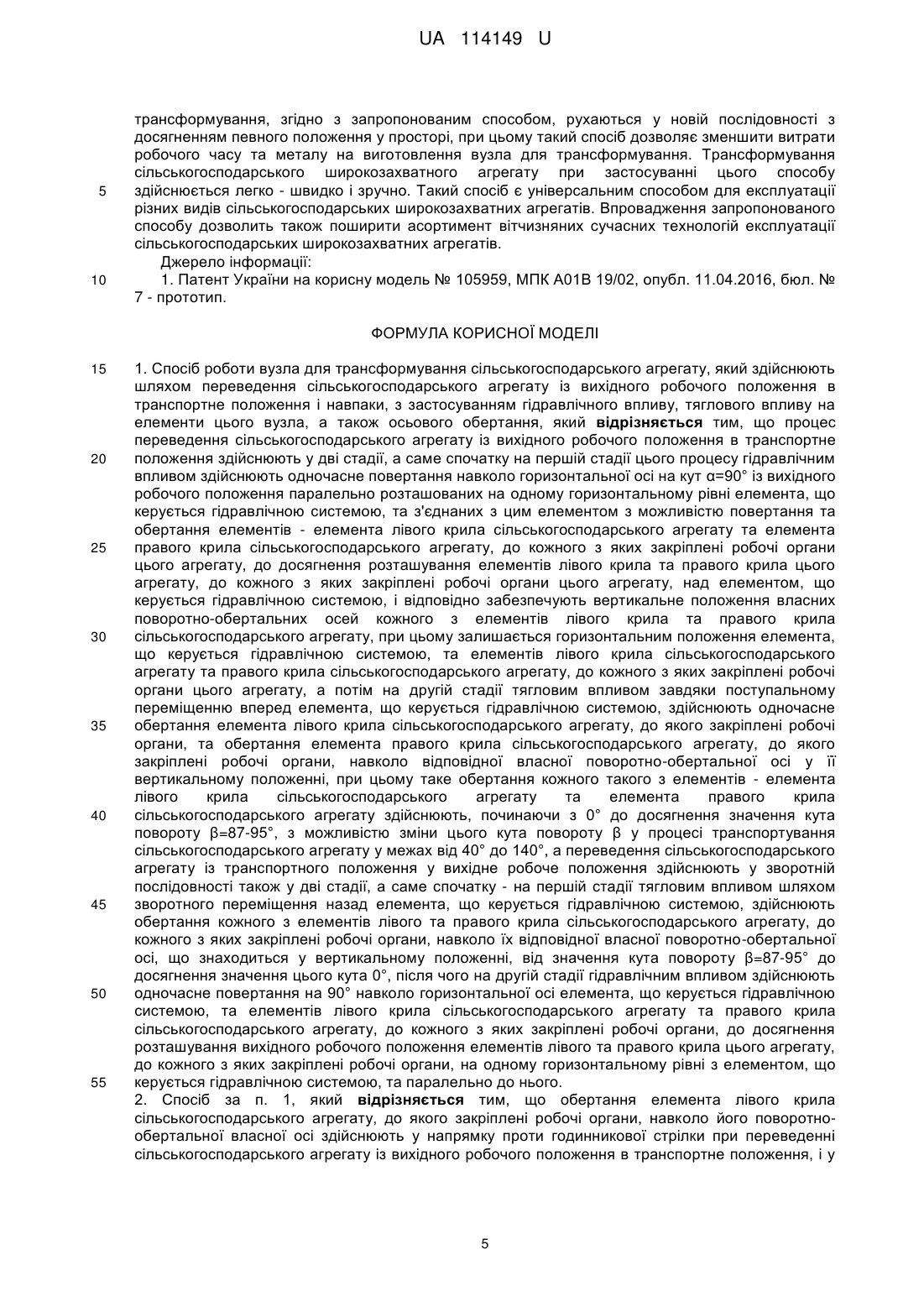
Реферат: Спосіб роботи вузла для трансформування сільськогосподарського агрегату шляхом переведення сільськогосподарського агрегату із вихідного робочого положення в транспортне положення і навпаки. Процес переведення сільськогосподарського агрегату із вихідного робочого положення в транспортне положення здійснюють у дві стадії. На першій стадії гідравлічним впливом здійснюють одночасне повертання навколо горизонтальної осі на кут α=90° із вихідного робочого положення паралельно розташованих на одному горизонтальному рівні елемента, що керується гідравлічною системою, та з'єднаних з цим елементом з можливістю повертання та обертання елементів елемента лівого крила сільськогосподарського агрегату та елемента правого крила сільськогосподарського агрегату, до кожного з яких закріплені робочі органи цього агрегату, до досягнення розташування елементів лівого крила та правого крила цього агрегату, до кожного з яких закріплені робочі органи цього агрегату, над елементом, що керується гідравлічною системою, і відповідно забезпечують вертикальне положення власних поворотно-обертальних осей кожного з елементів лівого крила та правого крила сільськогосподарського агрегату. При цьому залишається горизонтальним положення елемента, що керується гідравлічною системою, та елементів лівого та правого крила сільськогосподарського агрегату, до кожного з яких закріплені робочі органи цього агрегату. На другій стадії тягловим впливом завдяки поступальному переміщенню вперед елемента, що керується гідравлічною системою, здійснюють одночасне обертання елемента лівого крила та елемента правого крила сільськогосподарського агрегату, до кожного з яких закріплені робочі органи, навколо відповідної власної поворотно-обертальної осі у її вертикальному положенні. При цьому таке обертання кожного такого з елементів здійснюють, починаючи з 0° до досягнення значення кута повороту β=87-95°, з можливістю зміни цього кута повороту β у процесі транспортування сільськогосподарського агрегату у межах від 40° до 140°. Переведення сільськогосподарського агрегату із транспортного положення у вихідне робоче положення здійснюють у зворотній послідовності також у дві стадії. UA 114149 U (12) UA 114149 U UA 114149 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до технологій для трансформування широкозахватних сільськогосподарських агрегатів, а саме до способу роботи вузла для трансформування сільськогосподарського агрегату - широкозахватної борони, широкозахватного культиватора, комбінованих агрегатів або інших широкозахватних сільськогосподарських агрегатів. Найбільш близьким до запропонованого способу є спосіб роботи вузла для трансформування сільськогосподарського агрегату, який включає переведення такого агрегату із вихідного робочого положення в транспортне положення і навпаки, з застосуванням гідравлічного впливу, тяглового впливу на елементи цього вузла, осьове обертання (Патент України на корисну модель № 105959, МПК А01В 19/02, опубл. 11.04.2016, бюл. № 7). Таке технічне рішення дозволяє підвищити ефективність обробки ґрунту, але воно має резерв для удосконалення технології - роботи вузла для трансформування сільськогосподарського агрегату, рух елементів якого не є оптимальним для поліпшення умов експлуатації широкозахватного сільськогосподарського агрегату, для зниження собівартості вузла для трансформування. В основу корисної моделі поставлено задачу створення нового удосконаленого способу роботи вузла для трансформування сільськогосподарського агрегату, який би за рахунок нових технологічних дій, їх послідовності, кількісних характеристик, нової сукупності ознак дозволив би при використанні цього способу досягти технічного результату, а саме - поліпшити умови експлуатації сільськогосподарського широкозахватного агрегату, знизити собівартість вузла трансформування сільськогосподарського широкозахватного агрегату не менш ніж в 1,5 рази за рахунок того, що елементи вузла для трансформування, згідно з запропонованим способом, рухаються у новій послідовності з досягненням іншого положення у просторі. Поставлена задача вирішується тим, що запропонований спосіб роботи вузла для трансформування сільськогосподарського агрегату включає переведення сільськогосподарського агрегату із вихідного робочого положення в транспортне положення і навпаки, при цьому застосовують гідравлічний вплив, а також тягловий вплив на елементи цього вузла та осьове обертання. Новим є те, що процес переведення сільськогосподарського агрегату із вихідного робочого положення в транспортне положення здійснюють у дві стадії у певній послідовності дій. Спочатку на першій стадії цього процесу гідравлічним впливом здійснюють одночасне повертання навколо горизонтальної осі (4) на кут =90° із вихідного робочого положення паралельно розташованих на одному горизонтальному рівні елемента (1), що керується гідравлічною системою, та з'єднаних з цим елементом з можливістю повертання та обертання елементів - елемента (2) лівого крила агрегату та елемента (3) правого крила агрегату, до кожного з яких закріплені робочі органи цього агрегату, до досягнення розташування (положення) цих елементів лівого крила та правого крила агрегату, до кожного з яких закріплені робочі органи агрегату, над елементом (1), що керується гідравлічною системою, і відповідно забезпечують вертикальне положення власних поворотно-обертальних осей кожного з елементів лівого крила та правого крила агрегату - осі (5) та осі (6). При цьому залишається горизонтальним положення елемента (1), що керується гідравлічною системою, та елементів (2) і (3) - елементів лівого крила агрегату та правого крила агрегату, до кожного з яких закріплені робочі органи агрегату. Потім на другій стадії переводу агрегату із вихідного робочого положення в транспортне положення тягловим впливом завдяки поступальному переміщенню вперед елемента (1), що керується гідравлічною системою, здійснюють одночасне обертання елемента (2) лівого крила агрегату, до якого закріплені робочі органи, та обертання елемента (3) правого крила агрегату, до якого закріплені робочі органи, навколо відповідної власної поворотно-обертальної осі у її вертикальному положенні, а саме - навколо осі (5) та осі (6) відповідно; при цьому таке обертання кожного з елементів лівого крила агрегату та правого крила агрегату - елемента (2) та елемента (3) здійснюють, починаючи з 0° до досягнення значення кута повороту до його значення 87-95° з забезпеченням можливості зміни цього кута повороту у процесі транспортування у межах від 40° до 140°. Наступне переведення сільськогосподарського агрегату із транспортного положення у вихідне робоче положення здійснюють у зворотній послідовності також у дві стадії: спочатку - на першій стадії тягловим впливом шляхом зворотного переміщення назад елемента (1), що керується гідравлічною системою, здійснюють обертання кожного з елементів лівого та правого крила агрегату, до яких закріплені робочі органи, - елемента (2) та елемента (3) навколо їх відповідної власної поворотно-обертальної осі, що знаходиться у вертикальному положенні, тобто навколо осі (5) та осі (6) відповідно від значення кута повороту =87-95° до 0°. Потім на другій стадії гідравлічним впливом здійснюють одночасне повертання на 90° навколо горизонтальної осі (4) елемента (1), що керується гідравлічною системою, та елементів лівого крила агрегату та правого крила агрегату, до кожного з яких закріплені робочі органи 1 UA 114149 U 5 10 15 20 25 30 35 40 45 50 55 елементів (2) та (3) до досягнення розташування вихідного робочого положення цих елементів лівого та правого крила агрегату на одному горизонтальному рівні з елементом (1), що керується гідравлічною системою, і паралельно до нього. Додатково запропонований спосіб характеризується наступними ознаками. Обертання елемента (2) лівого крила агрегату, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі (5) здійснюють у напрямку проти годинникової стрілки при переведенні агрегату із вихідного робочого положення в транспортне положення, і у напрямку обертання цього елемента за годинниковою стрілкою - при переведенні агрегату із транспортного положення у вихідне робоче положення. Обертання елемента (3) правого крила агрегату, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі (6) здійснюють у напрямку за годинниковою стрілкою при переведенні агрегату із вихідного робочого положення в транспортне положення, і у напрямку обертання цього елемента проти годинникової стрілки - при переведенні агрегату із транспортного у вихідне робоче положення. Промислова здатність запропонованого способу ілюстрована на фігурах 1, 2, 3, 4 (ізометрія) та Прикладами його здійснення. Фіг. 1 - схематичне зображення стану (положення) вузла для трансформування у вихідному робочому положенні перед початком процесу переведення сільськогосподарського агрегату у транспортне положення; такий само стан вузла для трансформування й післяповернення сільськогосподарського агрегату із транспортного положення у вихідне робоче положення, тобто після здійснення другої стадії процесу цього переведення. Фіг. 2 - схематичне зображення стану (положення) вузла для трансформування після здійснення першої стадії процесу переведення сільськогосподарського агрегату із вихідного робочого положення у транспортне положення; такий само стан вузла для трансформування й після здійснення першої стадії процесу переведення сільськогосподарського агрегату із транспортного положення у вихідне робоче положення. Фіг. 3 - стрілками 7, 8 показано напрямки обертання елемента 2 лівого крила агрегату, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі 5, а стрілками 9, 10 показано напрямки обертання елемента 3 правого крила агрегату, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі 6. Робочі органи агрегату, що закріплені на елементах 2 та 3, на процес трансформування не впливають, і, відповідно на схематичних ілюстраціях запропонованого способу - на фіг. 1-4 не показані. 7 - напрямок обертання елемента 2 лівого крила агрегату, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі 5, проти годинникової стрілки при переведенні агрегату із вихідного робочого положення в транспортне положення, 8 - напрямок обертання елемента 2 - за годинниковою стрілкою - при переведенні агрегату із транспортного положення у вихідне робоче положення; 9 - напрямок обертання елемента 3 правого крила агрегату, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі 6 - за годинниковою стрілкою при переведенні агрегату із вихідного робочого положення в транспортне положення, 10 - напрямок обертання елемента 3 - проти годинникової стрілки при переведенні агрегату із транспортного у вихідне робоче положення. Фіг. 4 - схематичне зображення стану (положення) вузла для трансформування після здійснення другої стадії процесу переведення сільськогосподарського агрегату із робочого вихідного положення у транспортне положення, тобто після обертання елемента 2 лівого крила агрегату, до якого закріплені робочі органи, та обертання елемента 3 правого крила агрегату, до якого закріплені робочі органи агрегату, навколо кожної відповідної власної поворотнообертальної осі у її вертикальному положенні, до моменту, коли кут повороту досягає його значення від 87° до 95°; на цій фіг. 4 - момент при значенні кута повороту =90°, яке знаходиться у вищевказаному інтервалі. Запропонований спосіб роботи вузла для трансформування сільськогосподарського агрегату відповідно до прикладів його практичної реалізації здійснюють наступним чином. Приклад 1. Трансформування сільськогосподарського агрегату - широкозахватної зубової борони (далі борона) здійснюють із вихідного робочого положення в транспортне положення і навпаки - із транспортного положення у вихідне робоче положення відповідно до запропонованого способу завдяки певним діям, їх послідовності в роботі вузла для трансформування борони. 2 UA 114149 U 5 10 15 20 25 30 35 40 45 50 55 Перед початком транспортування широкозахватну борону переводять із вихідного робочого положення в транспортне положення. Процес переведення борони із вихідного робочого положення в транспортне положення здійснюють у дві стадії. На першій стадії цього процесу гідравлічним впливом здійснюють одночасне повертання паралельно розташованих на одному горизонтальному рівні елемента 1, що керується гідравлічною системою (гідроциліндри з рукавами високого тиску та перехідники), та з'єднаних з цим елементом 1 з можливістю повертання та обертання елемента 2 лівого крила борони та елемента 3 правого крила борони, до кожного з яких закріплені робочі органи борони, навколо горизонтальної осі 4 на кут =90° із вихідного робочого положення до досягнення розташування (положення) елементів 2 лівого крила та елемента 3 правого крила борони, до кожного з яких закріплені робочі органи, над елементом 1, що керується гідравлічною системою. При цьому забезпечують вертикальне положення власних поворотно-обертальних осей 5 та 6 кожного з елементів - елемента 2 лівого крила та 3 правого крила борони. У кінцевому положенні положення усіх вищевказаних елементів 1, 2, 3 залишається горизонтальним (фіг. 2). Кожен з елементів - елемент 2 лівого крила борони та елемент 3 правого крила борони має можливість обертання навколо його власної поворотно-обертальної осі, а саме елемент 2 - навколо поворотно-обертальної осі 5, елемент 3 - навколо поворотно-обертальної осі 6. Потім - на другій стадії тягловим впливом за допомогою транспортного засобу завдяки поступальному переміщенню вперед елемента 1, що керується гідравлічною системою, здійснюють обертання елемента 2 лівого крила борони, до якого закріплені робочі органи, та елемента 3 правого крила борони, до якого закріплені робочі органи, навколо відповідної власної поворотно-обертальної осі у її вертикальному положенні - навколо поворотнообертальної осі 5 та навколо поворотно-обертальної осі 6. Таке повертання - обертання кожного з елементів 2 та 3 здійснюють, починаючи з 0° до моменту досягнення значення кута повороту у межах 87°-95° з можливістю зміни цього кута у процесі транспортування у межах його значення від 40° до 140°. Обертання елемента 2 лівого крила борони, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі 5 здійснюють у напрямку проти годинникової стрілки при переведенні борони із вихідного робочого положення в транспортне положення. Обертання елемента 3 правого крила борони, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі 6 здійснюють у напрямку за годинниковою стрілкою при переведенні борони із вихідного робочого положення в транспортне положення. Після переведення борони із вихідного робочого положення у транспортне положення вона набуває трансформованої форми - її габаритний розмір - ширина стає зменшеної величини, що дозволяє транспортувати борону по дорогах. При транспортуванні борони кут обертання елементів 2 та 3 при поворотах борони змінюється від 40° до 140°, що забезпечує оптимальні умови для її руху по дорогах. Після закінчення транспортування борони її переводять із транспортного положення у вихідний робочий стан. Переведення борони із транспортного положення у вихідне робоче положення здійснюють у зворотній послідовності - також у дві стадії. На першій стадії цього процесу тягловим впливом шляхом зворотного переміщення назад елемента 1, що керується гідравлічною системою, здійснюють обертання елемента 2 лівого крила борони та елемента 3 правого крила борони, до кожного з яких закріплені робочі органи, навколо їх відповідної власної поворотно-обертальної осі, що знаходиться у вертикальному положенні, від значення кута повороту 87°-95° до 0°: а саме - обертання елемента 2 лівого крила борони навколо його поворотно-обертальної осі 5 та обертання елемента 3 правого крила агрегату навколо його поворотно-обертальної осі 6. Обертання елемента 2 лівого крила борони, до якого закріплені робочі органи, навколо його поворотно-обертальної власної вісі 5 здійснюють у напрямку його руху за годинниковою стрілкою - при переведенні борони із транспортного положення у вихідне робоче положення. Обертання елемента 3 правого крила борони, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі 6 здійснюють у напрямку його руху проти годинникової стрілки - при переведенні борони із транспортного положення у вихідне робоче положення. Потім на другій стадії гідравлічним впливом здійснюють одночасне повертання на 90° навколо горизонтальної осі 4 елемента 1, пов'язаного з гідравлічною системою, та елемента 2 лівого крила борони та елемента 3 правого крила борони, до кожного з яких закріплені робочі органи, до досягнення розташування вихідного робочого положення цих елементів 2 та 3 на одному горизонтальному рівні з елементом 1, що керується гідравлічною системою (фіг. 1). 3 UA 114149 U 5 10 15 20 25 30 35 40 45 50 55 60 Приклад 2. Здійснюють, як приклад 1, але здійснюють запропонований спосіб для трансформування сільськогосподарського агрегату - широкозахватної дискової борони. Приклад 3. Здійснюють, як приклад 1, але здійснюють запропонований спосіб для трансформування сільськогосподарського агрегату - широкозахватного культиватора. Приклад 4. Здійснюють, як приклад 1, але запропонований спосіб застосовують для трансформування комбінованого сільськогосподарського агрегату будь-якого сполучення комбінаційних складових. При застосуванні запропонованого способу після переведення сільськогосподарського широкозахватного агрегату із вихідного робочого положення у транспортне положення він набуває трансформованої форми - його габаритний розмір ширина стає зменшеної величини, що дозволяє транспортувати широкозахватний агрегат по дорогах. Сукупність усіх ознак запропонованого способу роботи вузла для трансформування сільськогосподарського агрегату, в томучислі його нові ознаки, дозволяють при його використанні забезпечити досягнення технічного результату, а саме - поліпшити умови експлуатації сільськогосподарського широкозахватного агрегату, знизити собівартість вузла трансформування широкозахватного сільськогосподарського агрегату не менш ніж в 1,5 рази. За рахунок нових ознак цього способу, а саме в результаті здійснення процесу переведення сільськогосподарського агрегату із вихідного робочого положення в транспортне положення у дві стадії, на першій з яких гідравлічним впливом здійснюють одночасне повертання навколо горизонтальної осі на кут =90° із вихідного робочого положення паралельно розташованих на одному горизонтальному рівні елемента, що керується гідравлічною системою, та з'єднаних з цим елементом з можливістю повертання та обертання елемента лівого крила агрегату та елемента правого крила агрегату, до кожного з яких закріплені робочі органи агрегату, до досягнення розташування елемента лівого крила та елемента правого крила агрегату, до кожного з яких закріплені робочі органи агрегату, над елементом, що керується гідравлічною системою, і відповідно забезпечення вертикального положення власних поворотно-обертальних осей кожного з елементів - елемента лівого крила та правого крила агрегату, при цьому положення усіх вищевказаних елементів 1, 2, 3 залишається горизонтальним, а потім на другій стадії тягловим впливом поступальним переміщенням вперед елемента, що керується гідравлічною системою, здійснення обертання елемента лівого крила агрегату, до якого закріплені робочі органи, та обертання елемента правого крила агрегату, до якого закріплені робочі органи, навколо відповідної власної поворотно-обертальної осі у її вертикальному положенні, при цьому здійснення такого обертання кожного з елементів - елемента лівого крила агрегату та правого крила агрегату, починаючи з 0° до досягнення кута повороту до його значення 87°-95° з можливістю зміни цього кута у процесі транспортування борони у межах від 40° до 140°, і наступного переведення сільськогосподарського агрегату із транспортного положення у вихідне робоче положення у зворотній послідовності у дві стадії відповідно до формули корисної моделі - поліпшуються умови експлуатації сільськогосподарського широкозахватного агрегату, знижується собівартість вузла трансформування не менш ніж в 1,5 рази за рахунок того, що елементи вузла для трансформування, згідно з запропонованим способом, рухаються у новій послідовності з досягненням іншого положення у просторі. Досягнення технічного результату при застосуванні запропонованого способу посилюється за рахунок того, що: обертання елемента лівого крила агрегату, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі здійснюють у напрямку проти годинникової стрілки при переведенні агрегату із вихідного робочого положення в транспортне положення, і у напрямку обертання цього елемента за годинниковою стрілкою - при переведенні агрегату із транспортного положення у вихідне робоче положення; обертання елемента правого крила агрегату, до якого закріплені робочі органи, навколо його поворотно-обертальної власної осі здійснюють у напрямку за годинниковою стрілкою при переведенні агрегату із вихідного робочого положення в транспортне положення, і у напрямку обертання цього елемента проти годинникової стрілки - при переведенні агрегату із транспортного у вихідне робоче положення. Технічний результат при застосуванні запропонованого способу досягається саме в межах характеристик процесу роботи вузла для трансформування відповідно до їх кількісних значень, що вказані в тексті формули цієї корисної моделі. Експериментальні випробування запропонованого способу, який передбачає нові технологічні дії у процесі роботи вузла для трансформування широкозахватного агрегату, їх послідовність, кількісні характеристики, нову сукупність ознак, показали високу ефективність цього способу, підтвердили досягнення технічного результату - поліпшення умов експлуатації сільськогосподарських широкозахватних агрегатів, можливість зниження собівартості вузла трансформування агрегату не менш ніж в 1,5 рази за рахунок того, що елементи вузла для 4 UA 114149 U 5 10 трансформування, згідно з запропонованим способом, рухаються у новій послідовності з досягненням певного положення у просторі, при цьому такий спосіб дозволяє зменшити витрати робочого часу та металу на виготовлення вузла для трансформування. Трансформування сільськогосподарського широкозахватного агрегату при застосуванні цього способу здійснюється легко - швидко і зручно. Такий спосіб є універсальним способом для експлуатації різних видів сільськогосподарських широкозахватних агрегатів. Впровадження запропонованого способу дозволить також поширити асортимент вітчизняних сучасних технологій експлуатації сільськогосподарських широкозахватних агрегатів. Джерело інформації: 1. Патент України на корисну модель № 105959, МПК А01В 19/02, опубл. 11.04.2016, бюл. № 7 - прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 40 45 50 55 1. Спосіб роботи вузла для трансформування сільськогосподарського агрегату, який здійснюють шляхом переведення сільськогосподарського агрегату із вихідного робочого положення в транспортне положення і навпаки, з застосуванням гідравлічного впливу, тяглового впливу на елементи цього вузла, а також осьового обертання, який відрізняється тим, що процес переведення сільськогосподарського агрегату із вихідного робочого положення в транспортне положення здійснюють у дві стадії, а саме спочатку на першій стадії цього процесу гідравлічним впливом здійснюють одночасне повертання навколо горизонтальної осі на кут α=90° із вихідного робочого положення паралельно розташованих на одному горизонтальному рівні елемента, що керується гідравлічною системою, та з'єднаних з цим елементом з можливістю повертання та обертання елементів - елемента лівого крила сільськогосподарського агрегату та елемента правого крила сільськогосподарського агрегату, до кожного з яких закріплені робочі органи цього агрегату, до досягнення розташування елементів лівого крила та правого крила цього агрегату, до кожного з яких закріплені робочі органи цього агрегату, над елементом, що керується гідравлічною системою, і відповідно забезпечують вертикальне положення власних поворотно-обертальних осей кожного з елементів лівого крила та правого крила сільськогосподарського агрегату, при цьому залишається горизонтальним положення елемента, що керується гідравлічною системою, та елементів лівого крила сільськогосподарського агрегату та правого крила сільськогосподарського агрегату, до кожного з яких закріплені робочі органи цього агрегату, а потім на другій стадії тягловим впливом завдяки поступальному переміщенню вперед елемента, що керується гідравлічною системою, здійснюють одночасне обертання елемента лівого крила сільськогосподарського агрегату, до якого закріплені робочі органи, та обертання елемента правого крила сільськогосподарського агрегату, до якого закріплені робочі органи, навколо відповідної власної поворотно-обертальної осі у її вертикальному положенні, при цьому таке обертання кожного такого з елементів - елемента лівого крила сільськогосподарського агрегату та елемента правого крила сільськогосподарського агрегату здійснюють, починаючи з 0° до досягнення значення кута повороту β=87-95°, з можливістю зміни цього кута повороту β у процесі транспортування сільськогосподарського агрегату у межах від 40° до 140°, а переведення сільськогосподарського агрегату із транспортного положення у вихідне робоче положення здійснюють у зворотній послідовності також у дві стадії, а саме спочатку - на першій стадії тягловим впливом шляхом зворотного переміщення назад елемента, що керується гідравлічною системою, здійснюють обертання кожного з елементів лівого та правого крила сільськогосподарського агрегату, до кожного з яких закріплені робочі органи, навколо їх відповідної власної поворотно-обертальної осі, що знаходиться у вертикальному положенні, від значення кута повороту β=87-95° до досягнення значення цього кута 0°, після чого на другій стадії гідравлічним впливом здійснюють одночасне повертання на 90° навколо горизонтальної осі елемента, що керується гідравлічною системою, та елементів лівого крила сільськогосподарського агрегату та правого крила сільськогосподарського агрегату, до кожного з яких закріплені робочі органи, до досягнення розташування вихідного робочого положення елементів лівого та правого крила цього агрегату, до кожного з яких закріплені робочі органи, на одному горизонтальному рівні з елементом, що керується гідравлічною системою, та паралельно до нього. 2. Спосіб за п. 1, який відрізняється тим, що обертання елемента лівого крила сільськогосподарського агрегату, до якого закріплені робочі органи, навколо його поворотнообертальної власної осі здійснюють у напрямку проти годинникової стрілки при переведенні сільськогосподарського агрегату із вихідного робочого положення в транспортне положення, і у 5 UA 114149 U 5 напрямку обертання цього елемента за годинниковою стрілкою - при переведенні сільськогосподарського агрегату із транспортного положення у вихідне робоче положення. 3. Спосіб за п. 1, який відрізняється тим, що обертання елемента правого крила сільськогосподарського агрегату, до якого закріплені робочі органи, навколо його поворотнообертальної власної осі здійснюють у напрямку за годинниковою стрілкою при переведенні сільськогосподарського агрегату із вихідного робочого положення в транспортне положення, і у напрямку обертання цього елемента проти годинникової стрілки - при переведенні сільськогосподарського агрегату із транспортного у вихідне робоче положення. 6 UA 114149 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A01B 19/02, A01B 73/00, A01B 39/00
Мітки: трансформування, спосіб, вузла, роботи, сільськогосподарського, агрегату
Код посилання
<a href="https://ua.patents.su/9-114149-sposib-roboti-vuzla-dlya-transformuvannya-silskogospodarskogo-agregatu.html" target="_blank" rel="follow" title="База патентів України">Спосіб роботи вузла для трансформування сільськогосподарського агрегату</a>
Пристрій для направлення руху мостового сільськогосподарського агрегату

Номер патенту: 38238
Опубліковано: 15.05.2001
Автор: Олішевський Микола Адамович
МПК: A01B 49/00
Мітки: пристрій, агрегату, сільськогосподарського, руху, направлення, мостового
Текст:
...дорівнює відстані між спрямовуючими 2 – L2. Відстань між дугоподібними елементами 3 і канавками 5 в положенні II та між дугоподібними елементами 4 та канавками 6 дорівнює ширині колеса з ребордами візка (фіг. 2). Мостовий сільськогосподарський агрегат рухається вздовж поля по спрямовуючим 1, при цьому колеса 9 і 11 візків 14 і 15 проходять по канавках 7 першу спрямовуючу 2, потім дугоподібні елементи 4 пересуваються з положення І в положення...
Мобільна система живлення сільськогосподарського агрегату
Номер патенту: 110272
Опубліковано: 10.10.2016
Автори: Слободян Володимир Миколайович, Адамчук Валерій Васильович, Мельник Роман Васильович, Мироненко Валентин Григорович
МПК: B60L 1/04, A01B 69/00, B60D 1/62, B60M 1/00
Мітки: живлення, система, сільськогосподарського, агрегату, мобільна
Формула / Реферат:
Мобільна система живлення сільськогосподарського агрегату, що містить тролей живлення, струмознімальний візок, каретку, електроколектор на агрегаті, силовий кабель, яка відрізняється тим, що тролей живлення закріплений між двома самохідними розмітниками, які переміщуються по краях поля перпендикулярно руху агрегату і на яких встановлені пристрої навігації агрегату на гоні, а сам агрегат має дві телескопічні штанги, які встановлені на...
Спосіб виконання першого проходу мобільного сільськогосподарського агрегату
Номер патенту: 100649
Опубліковано: 10.08.2015
Автор: Малюта Сергій Іванович
МПК: B60W 30/10
Мітки: агрегату, першого, сільськогосподарського, виконання, проходу, мобільного, спосіб
Формула / Реферат:
1. Спосіб виконання першого проходу мобільного сільськогосподарського агрегату, що полягає в огляді поля, виборі способів руху агрегату, розмічуванні поворотних смуг, розбиванні поля на загінки, провішуванні лінії першого проходу за допомогою вішок, який відрізняється тим, що перед початком руху агрегат встановлюють біля вішки, встановленої на початку гону, а після початку руху перший прохід здійснюють, ведучи агрегат, орієнтуючись на вішку,...
Дозатор насіння для сільськогосподарського агрегату і змінне кільце тримача щітки дозатора насіння
Номер патенту: 72242
Опубліковано: 15.02.2005
Автори: Портілло Нетза, Лодіко Джеймс Ірвін, Мартін Роберт Уолліс
МПК: A01B 49/06, A01C 7/00
Мітки: сільськогосподарського, змінне, кільце, тримача, агрегату, щітки, дозатор, дозатора, насіння
Формула / Реферат:
1. Дозатор насіння для сільськогосподарського агрегату, що вміщує: нерухомий корпус (10), що має впускний отвір (14) для приймання насіння і випускний отвір (16), через який розподіляють дозоване насіння; прикріплений з можливістю обертання до нерухомого корпусу круглий елемент, який містить ряд окремих приймальних комірок (38) для приймання і транспортування окремих насінин, при цьому круглий елемент має вісь обертання; в якому насіння...
Спосіб роботи котельного або теплового агрегату
Номер патенту: 85876
Опубліковано: 10.03.2009
Автори: Благута Анатолій Олександрович, Благута Ірина Анатоліївна, Благута Аксінія Анатоліївна
МПК: F22B 37/00
Мітки: спосіб, теплового, котельного, агрегату, роботи
Формула / Реферат:
Спосіб роботи котельного агрегату або теплового агрегату, котрий включає подачу через пальники в топці котла природного газу і повітря або робочого тіла, спалювання робочого тіла, нагрівання води в теплообміннику, виведення продуктів згорання із топки котла, який відрізняється тим, що в зону горіння робочого тіла подають водяну пару, яку одержують при згоранні робочого тіла шляхом пропускання струменя робочого тіла через шар води або водяну...
Попередній патент: Плитка для тротуарів і дорожнього покриття
Наступний патент: Спосіб підвищення надійності експлуатації рухомого складу
Випадковий патент: Спосіб лікування гелікобактерасоційованої гепатогенної виразки шлунка