Пристрій автоматичного визначення поправки компаса

Формула / Реферат
1. Устройство автоматического определения поправки компаса, содержащее датчик пеленга, соединенный своим информационным выходом с первым информационным входом блока осреднения пеленга, координат и времени, второй и третий информационные входы которого соединены соответственно с выходами датчика координат судна и датчика текущего Гринвичского времени и даты, и блок определения поправки компаса, причем управляющий выход датчика пеленга соединен с управляющими входами датчика координат судна и датчика текущего Гринвичского времени и даты, имеющего и второй выход, являющийся информационно-управляющим, отличающееся тем, что в него введены блок выработки Гринвичской даты, при этом его первый вход, являющийся информационным, соединен с выходом блока осреднения пеленга, координат и времени, второй информационно-управляющий вход соединен со вторым выходом датчика текущего Гринвичского времени и даты, а два информационных выхода соединены соответственно с первым и вторым информационными входами блока определения поправки компаса, выход которого является выходом устройства автоматического определения поправки компаса.
2. Устройство автоматического определения поправки компаса по п.1, отличающееся тем, что блок выработки Гринвичской даты выполнен в виде последовательного соединения первого порогового элемента, первого элемента установки нуля, первого счетчика, второго порогового элемента, первого, второго и третьего элементов записи, а также последовательного соединения третьего порогового элемента, четвертого элемента записи, четвертого порогового элемента, второго элемента установки нуля, элемента сброса в исходное состояние, пятого порогового элемента и пятого элемента записи, причем первый вход четвертого порогового элемента соединен также со вторыми выходами первого и третьего пороговых элементов, а второй выход соединен также со входом пятого элемента записи, второй выход второго порогового элемента соединен со входом третьего порогового элемента, а первый выход пятого порогового элемента соединен со входом третьего элемента записи, при этом первым информационным входом блока выработки Гринвичской даты являются объединенные вторые входы четвертого и пятого пороговых элементов, а также второго элемента записи, вторым информационно-управляющим входом блока выработки Гринвичской даты являются объединенные вход первого порогового элемента и вторые входы первого и четвертого элементов записи, первым информационным выходом блока выработки Гринвичской даты являются объединенные выходы третьего и пятого элементов записи, а второй информационный выход объединен с первым информационным входом блока.
Текст
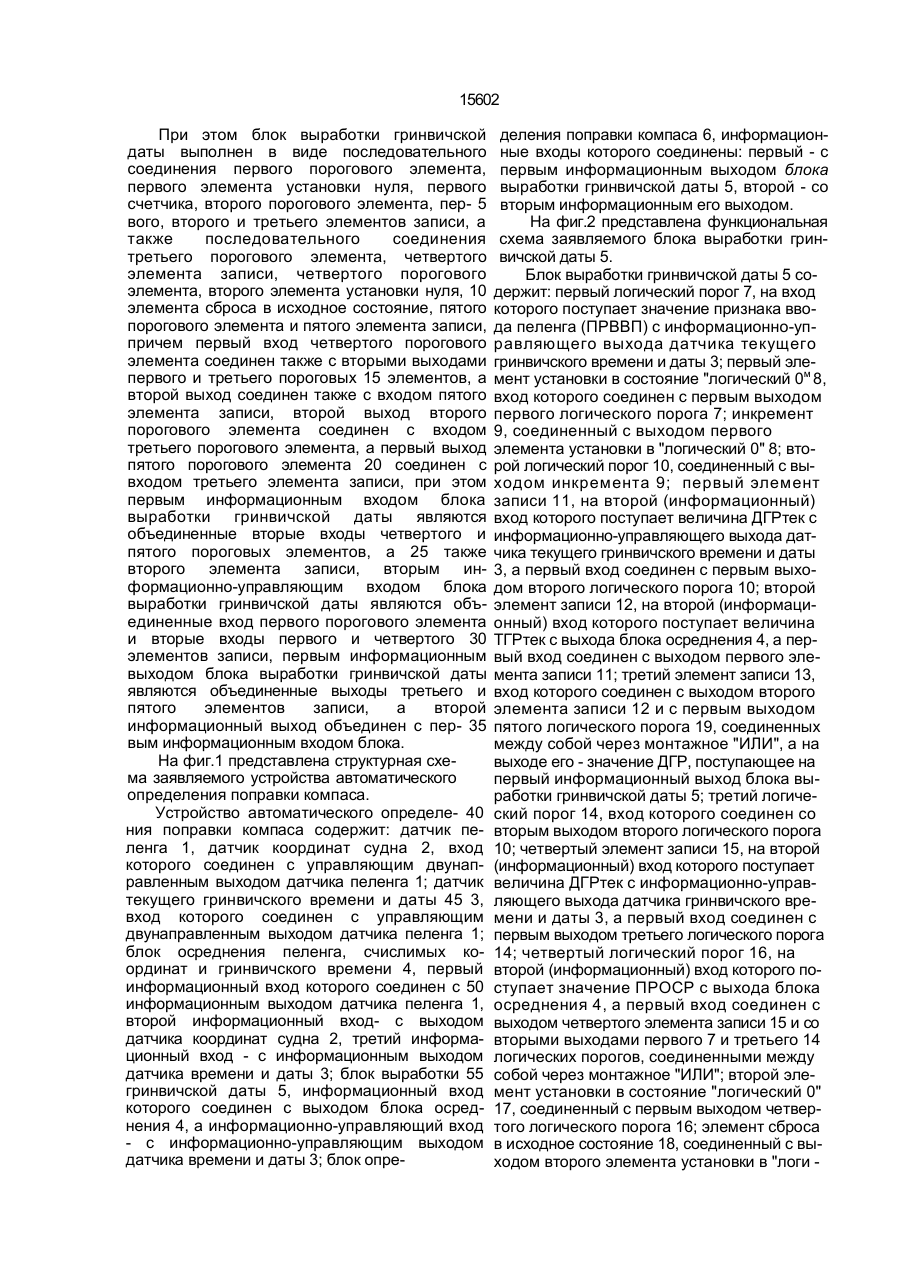
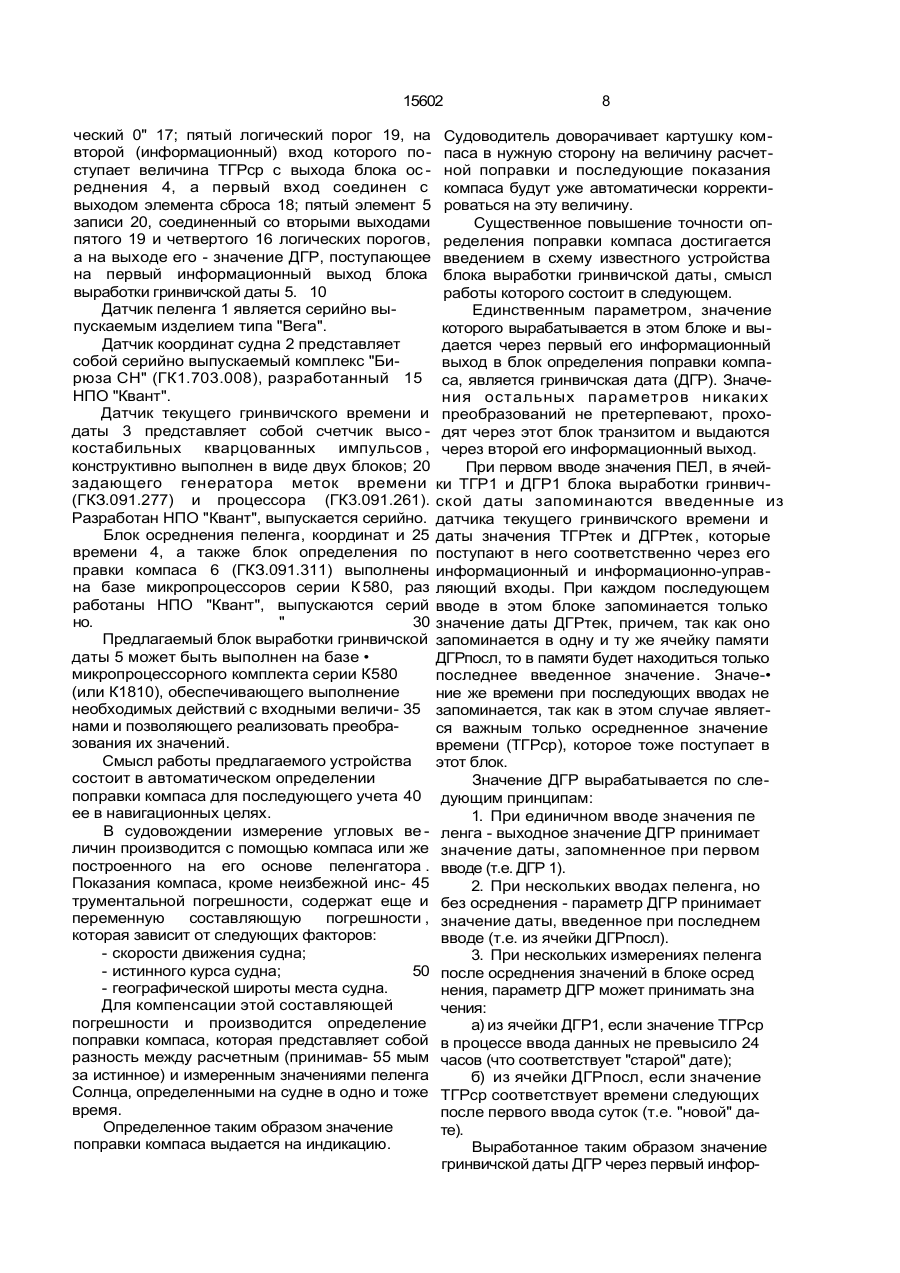
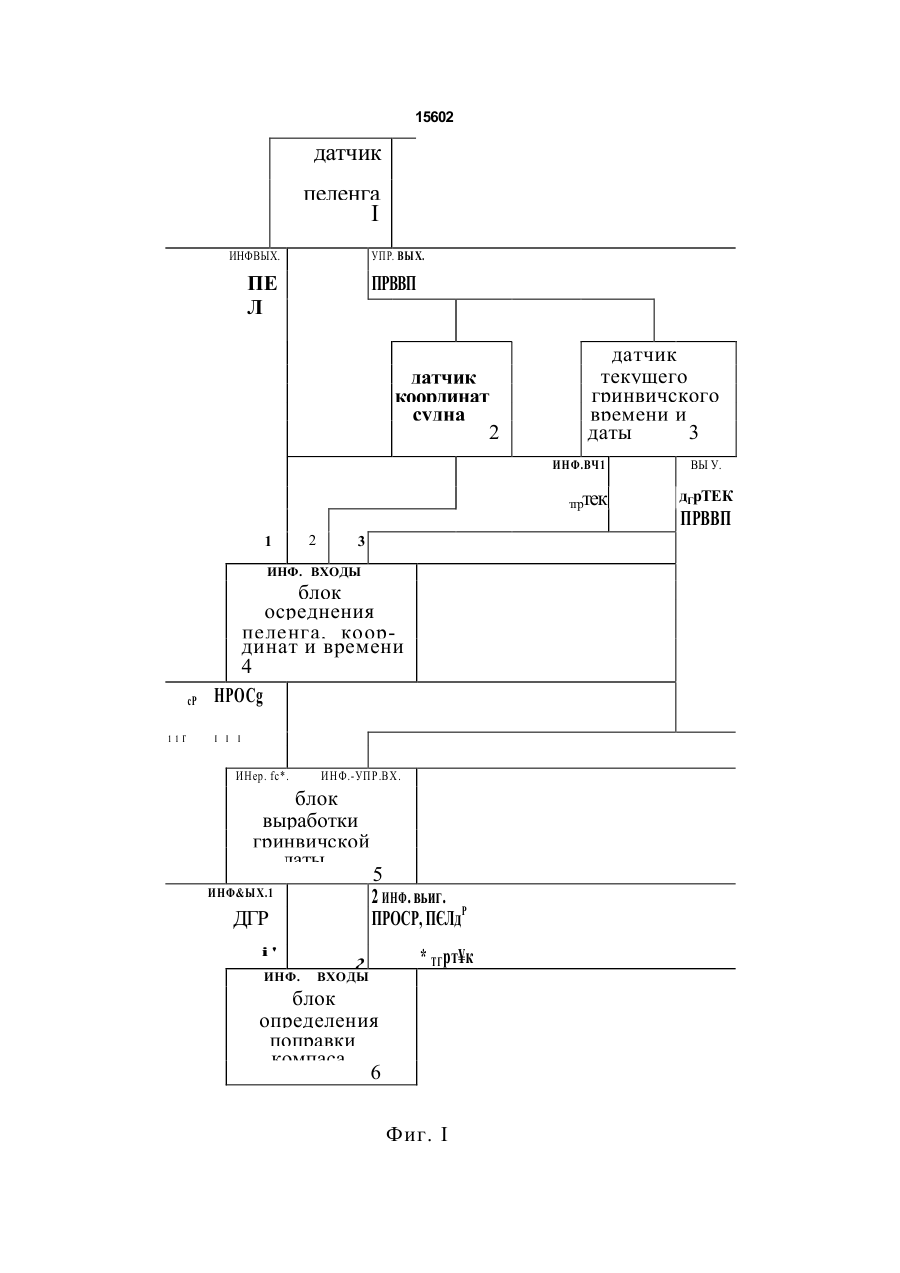
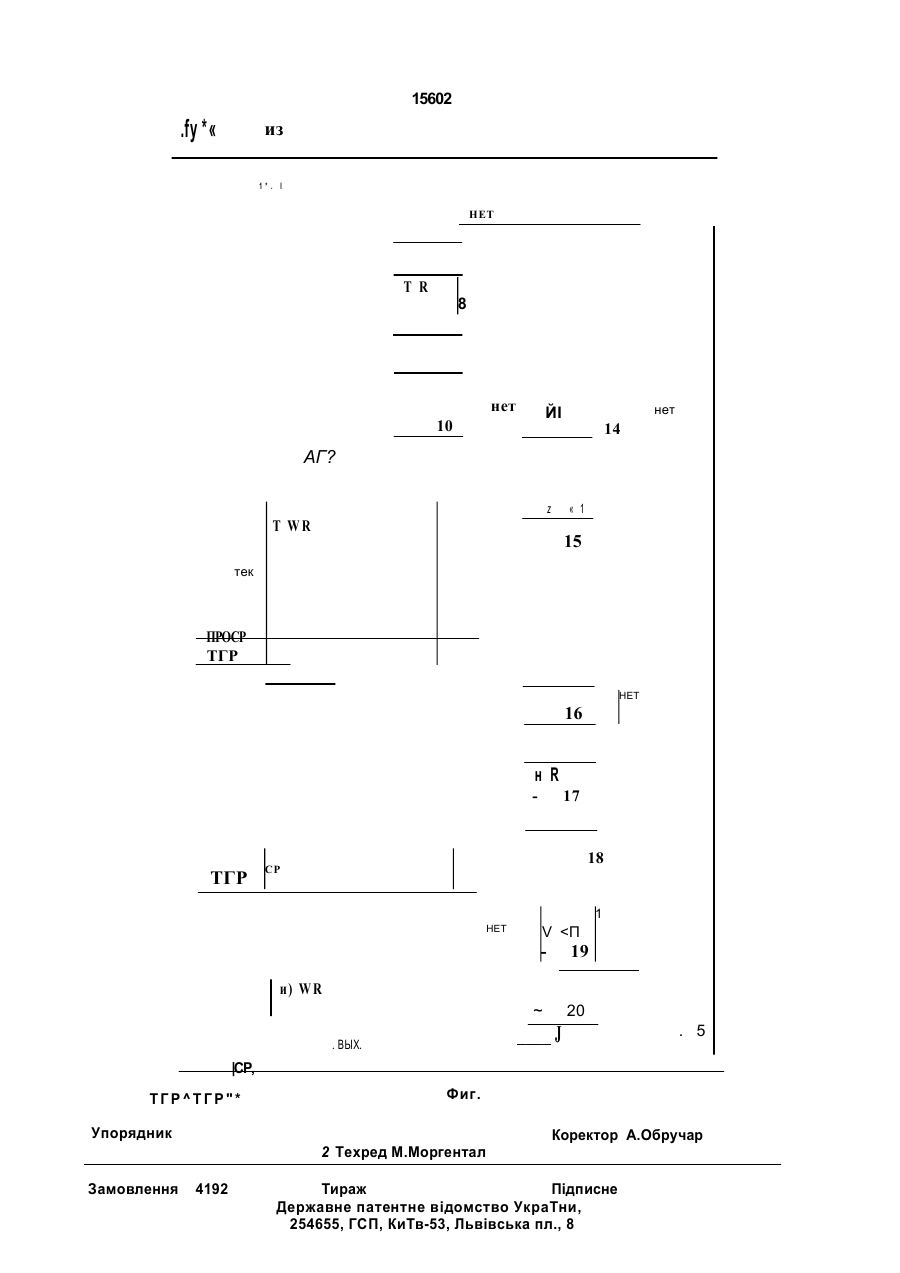
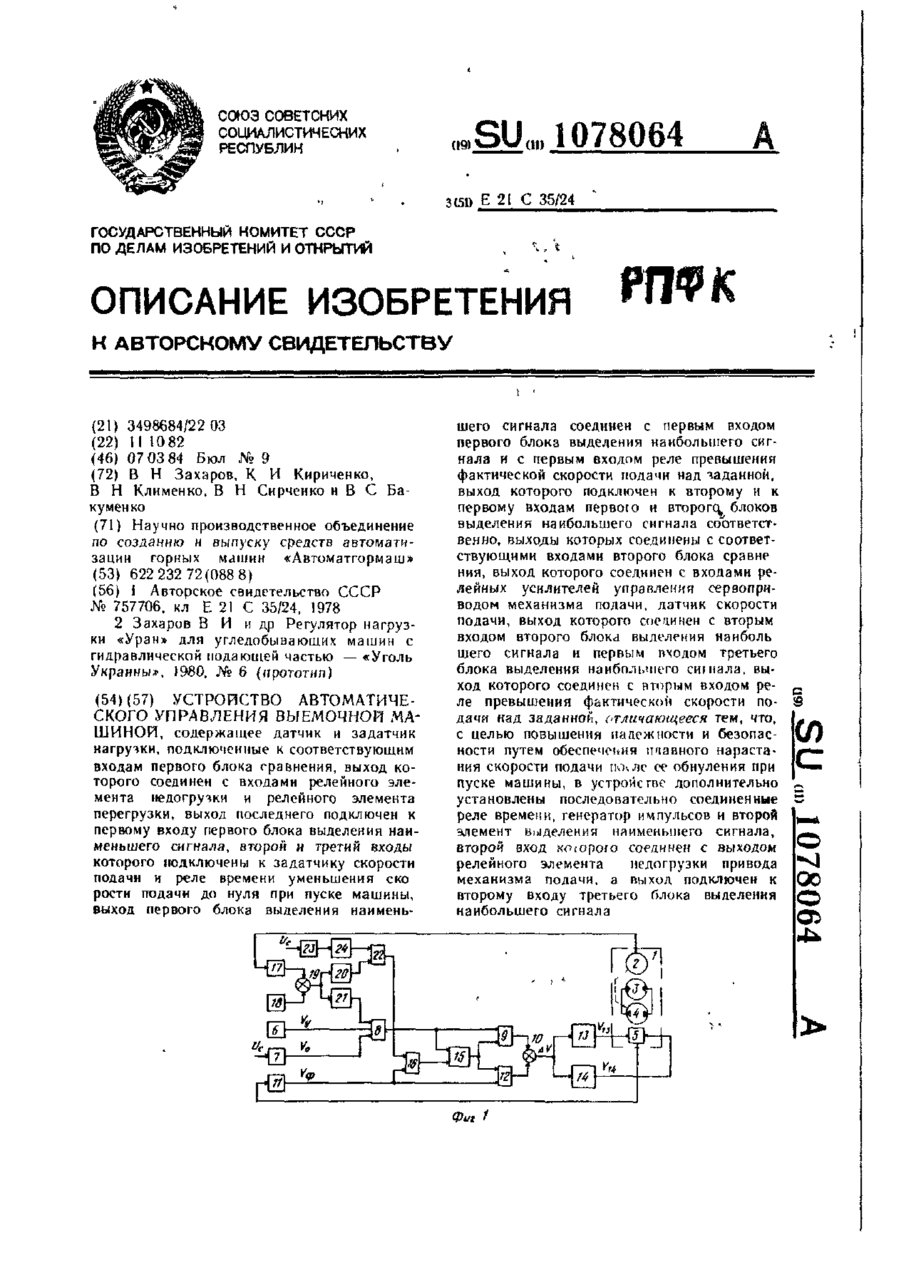
1. Устройство автоматического определения поправки компаса, содержащее датчик пеленга, соединенный своим информационным выходом с первым информационным входом блока осреднения пеленга, координат и времени, второй и третий информационные входы которого соединены соответственно с выходами датчика координат судна и датчика текущего Гринвичского времени и даты, и блок определения поправки компаса, причем управляющий выход датчика пеленга соединен с управляющими входами датчика координат судна и датчика текущего Гринвичского времени и даты, имеющего и второй выход, являющийся информационно-управляющим, о т л и ч а ю щееся тем, что в него введены блок выработки Гринвичской даты, при этом его первый вход, являющийся информационным, соединен с выходом блока осреднения пеленга, координат и времени, второй информационно-управляющий вход соединен со вторым выходом датчика текущего Гринвичского времени и даты, а два информационных выхода соединены соответственно с первым и вторым информационными входами блока определения поправки компаса, выход которого является выходом устройст ва автоматического определения поправки компаса. 2. Устройство автоматического определения поправки компаса по п. 1,отличающ е е с я тем, что блок выработки Гринвичской даты выполнен в виде последовательного соединения первого порогового элемента, первого элемента установки нуля, первого счетчика, второго порогового элемента, первого, второго и третьего элементов записи, а также последовательного соединения третьего порогового элемента, четвертого элемента записи, четвертого порогового элемента, второго элемента установки нуля, элемента сброса в исходное состояние, пятого порогового элемента и пятого элемента записи, причем первый вход четвертого порогового элемента соединен также со вторыми выходами первого и третьего пороговых элементов, а второй выход соединен также со входом пятого элемента записи, второй выход второго порогового элемента соединен со входом третьего порогового элемента, а первый выход пятого порогового элемента соединен со входом третьего элемента записи, при этом первым информационным входом блока выработки Гринвичской даты являются объединенные вторые входы четвертого и пятого пороговых элементов, а также второго элемента записи, вторым информационно-управляющим входом блока выработки Гринвичской даты являются объединенные вход первого порогового элемента и вторые входы первого и четвертого элементов записи, первым информационным выходом блока выработки Гринвичской даты являются объединенные выходы третьего и пятого элементов записи, а второй информационный выход объединен с первым информационным входом блока. С > ел ON О О 15602 Изобретение относится к навигационным измерениям и может быть использовано в судовых навигационных автоматизированных комплексах. Известно устройство автоматического 5 определения поправки компаса в навигационном комплексе "Бриз" [1], содержащее блок ввода гринвичской даты, датчик пеленга, датчик координат (широты и долготы) судна, датчик текущего гринвичского времени и 10 даты, блок осреднения пеленга, координат и гринвичского времени, блок определения поправки компаса, в котором первый информационный вход блока осреднения соединен с информационным выходом датчика 15 пеленга, вход которого соединен с управляющим выходом блока ввода гринвичской даты; второй информационный вход блока осреднения соединен с выходом датчика координат судна, вход которого соединен с 20 управляющим двунаправленным выходом датчика пеленга, а третий информационный вход блока осреднения соединен с информационным выходом датчика текущего гринвичского времени и даты, вход которого 25 соединен с управляющим двунаправленным выходом датчика пеленга; выход блока осреднения пеленга, координат и времени соединен со вторым информационным входом блока определения поправки компаса, пер- 30 вый информационный вход которого соединен с информационным выходом блока ввода гринвичской даты. Названное устройство обеспечивает автоматическое определение поправки компа- 35 са по Солнцу. Недостатком этого устройства является низкая точность определения поправки компаса при ее вычислении по исходным данным, введенным в момент изменения 40 гринвичской даты. Наиболее близким по технической сущности к изобретению является устройство автоматического определения4 поправки компаса, реализованное в навигационной 45 системе "Бирюза" [2], содержащее блок ввода гринвичской даты, датчик пеленга, датчик координат (широты и долготы) судна, датчик текущего гринвичского времени и даты, блок осреднения пеленга, координат и гринвич- 50 ского времени, блок определения поправки компаса, в котором первый информационный вход блока осреднения соединен с информационным выходом датчика пеленга, вход которого соединен с управляющим вы- 55 ходом блока ввода гринвичской даты; второй информационный вход блока осреднения соединен с выходом датчика координат судна, вход которого соединен с управляющим двунаправленным выходом датчика пеленга, а третий информационный вход блока осреднения соединен с информационным выходом датчика текущего гринвичского времени и даты, вход которого соединен с управляющим двунаправленным выходом датчика пеленга; выход блока осреднения пеленга, координат и времени соединен со вторым информационным входом блока определения поправки компаса, первый информационный вход которого соединен с информационным выходом блока ввода гринвичской даты. Названное устройство обеспечивает автоматическое определение поправки компаса по Солнцу. Недостатком этого устройства является низкая точность определения поправки компаса при ее вычислении по исходным данным, введенным в момент изменения гринвичской даты, обусловленная принятой в нем организацией процесса ввода данных измерений и отсутствием механизма привязки значений этих данных к фактической календарной дате. Целью изобретения является повышение точности автоматического определения поправки компаса по исходным данным, введенным в момент изменения текущей гринвичской даты, за счет гарантированной привязки к значению даты значений остальных параметров. Решение такой задачи достигается тем, что в устройство автоматического определения компаса, содержащее датчик пеленга, соединенный своим информационным выходом с первым информационным входом блока осреднения пеленга, координат и времени, второй и третий информационные входы которого соединены соответственно с выходами датчика координат судна и датчика текущего гринвичского времени и даты, и блок определения поправки компаса, причем управляющий выход датчика пеленга соединен со входами датчика координат судна и датчика текущего гринвичского времени и даты, имеющего второй выход, являющийся информационно-управляющим, согласно изобретению, введен блок выработки гринвичской даты, при этом его первый вход, являющийся информационным, соединен с выходом блока осреднения пеленга, координат и времени, второй информационно-управляющий вход соединен со вторым выходом датчика текущего гринвичского времени и даты, а два информационных выхода соединены соответственно с первым и вторым информационными входами блока определения поправки компаса, выход которого является выходом устройства автоматического определения поправки компаса. 15602 При этом блок выработки гринвичской даты выполнен в виде последовательного соединения первого порогового элемента, первого элемента установки нуля, первого счетчика, второго порогового элемента, пер- 5 вого, второго и третьего элементов записи, а также последовательного соединения третьего порогового элемента, четвертого элемента записи, четвертого порогового элемента, второго элемента установки нуля, 10 элемента сброса в исходное состояние, пятого порогового элемента и пятого элемента записи, причем первый вход четвертого порогового элемента соединен также с вторыми выходами первого и третьего пороговых 15 элементов, а второй выход соединен также с входом пятого элемента записи, второй выход второго порогового элемента соединен с входом третьего порогового элемента, а первый выход пятого порогового элемента 20 соединен с входом третьего элемента записи, при этом первым информационным входом блока выработки гринвичской даты являются объединенные вторые входы четвертого и пятого пороговых элементов, а 25 также второго элемента записи, вторым информационно-управляющим входом блока выработки гринвичской даты являются объединенные вход первого порогового элемента и вторые входы первого и четвертого 30 элементов записи, первым информационным выходом блока выработки гринвичской даты являются объединенные выходы третьего и пятого элементов записи, а второй информационный выход объединен с пер- 35 вым информационным входом блока. На фиг.1 представлена структурная схема заявляемого устройства автоматического определения поправки компаса. Устройство автоматического определе- 40 ния поправки компаса содержит: датчик пеленга 1, датчик координат судна 2, вход которого соединен с управляющим двунаправленным выходом датчика пеленга 1; датчик текущего гринвичского времени и даты 45 3, вход которого соединен с управляющим двунаправленным выходом датчика пеленга 1; блок осреднения пеленга, счислимых координат и гринвичского времени 4, первый информационный вход которого соединен с 50 информационным выходом датчика пеленга 1, второй информационный вход- с выходом датчика координат судна 2, третий информационный вход - с информационным выходом датчика времени и даты 3; блок выработки 55 гринвичской даты 5, информационный вход которого соединен с выходом блока осреднения 4, а информационно-управляющий вход - с информационно-управляющим выходом датчика времени и даты 3; блок опре деления поправки компаса 6, информационные входы которого соединены: первый - с первым информационным выходом блока выработки гринвичской даты 5, второй - со вторым информационным его выходом. На фиг.2 представлена функциональная схема заявляемого блока выработки гринвичской даты 5. Блок выработки гринвичской даты 5 содержит: первый логический порог 7, на вход которого поступает значение признака ввода пеленга (ПРВВП) с информационно-управляющего выхода датчика текущего гринвичского времени и даты 3; первый элемент установки в состояние "логический 0м 8, вход которого соединен с первым выходом первого логического порога 7; инкремент 9, соединенный с выходом первого элемента установки в "логический 0" 8; второй логический порог 10, соединенный с выходом инкремента 9; первый элемент записи 11, на второй (информационный) вход которого поступает величина ДГРтек с информационно-управляющего выхода датчика текущего гринвичского времени и даты 3, а первый вход соединен с первым выходом второго логического порога 10; второй элемент записи 12, на второй (информационный) вход которого поступает величина ТГРтек с выхода блока осреднения 4, а первый вход соединен с выходом первого элемента записи 11; третий элемент записи 13, вход которого соединен с выходом второго элемента записи 12 и с первым выходом пятого логического порога 19, соединенных между собой через монтажное "ИЛИ", а на выходе его - значение ДГР, поступающее на первый информационный выход блока выработки гринвичской даты 5; третий логический порог 14, вход которого соединен со вторым выходом второго логического порога 10; четвертый элемент записи 15, на второй (информационный) вход которого поступает величина ДГРтек с информационно-управляющего выхода датчика гринвичского времени и даты 3, а первый вход соединен с первым выходом третьего логического порога 14; четвертый логический порог 16, на второй (информационный) вход которого поступает значение ПРОСР с выхода блока осреднения 4, а первый вход соединен с выходом четвертого элемента записи 15 и со вторыми выходами первого 7 и третьего 14 логических порогов, соединенными между собой через монтажное "ИЛИ"; второй элемент установки в состояние "логический 0" 17, соединенный с первым выходом четвертого логического порога 16; элемент сброса в исходное состояние 18, соединенный с выходом второго элемента установки в "логи 15602 8 ческий 0" 17; пятый логический порог 19, на Судоводитель доворачивает картушку комвторой (информационный) вход которого по- паса в нужную сторону на величину расчетступает величина ТГРср с выхода блока ос - ной поправки и последующие показания реднения 4, а первый вход соединен с компаса будут уже автоматически коррективыходом элемента сброса 18; пятый элемент 5 роваться на эту величину. записи 20, соединенный со вторыми выходами Существенное повышение точности оппятого 19 и четвертого 16 логических порогов, ределения поправки компаса достигается а на выходе его - значение ДГР, поступающее введением в схему известного устройства на первый информационный выход блока блока выработки гринвичской даты, смысл выработки гринвичской даты 5. 10 работы которого состоит в следующем. Датчик пеленга 1 является серийно выЕдинственным параметром, значение пускаемым изделием типа "Вега". которого вырабатывается в этом блоке и выДатчик координат судна 2 представляет дается через первый его информационный собой серийно выпускаемый комплекс "Бивыход в блок определения поправки компарюза СН" (ГК1.703.008), разработанный 15 са, является гринвичская дата (ДГР). ЗначеНПО "Квант". ния остальных параметров никаких Датчик текущего гринвичского времени и преобразований не претерпевают, проходаты 3 представляет собой счетчик высо - дят через этот блок транзитом и выдаются костабильных кварцованных импульсов , через второй его информационный выход. конструктивно выполнен в виде двух блоков; 20 При первом вводе значения ПЕЛ, в ячейзадающего генератора меток времени ки ТГР1 и ДГР1 блока выработки гринвич(ГКЗ.091.277) и процессора (ГК3.091.261). ской даты запоминаются введенные из Разработан НПО "Квант", выпускается серийно. датчика текущего гринвичского времени и Блок осреднения пеленга, координат и 25 даты значения ТГРтек и ДГРтек , которые времени 4, а также блок определения по поступают в него соответственно через его правки компаса 6 (ГКЗ.091.311) выполнены информационный и информационно-управна базе микропроцессоров серии К 580, раз ляющий входы. При каждом последующем работаны НПО "Квант", выпускаются серий вводе в этом блоке запоминается только но. " 30 значение даты ДГРтек, причем, так как оно Предлагаемый блок выработки гринвичской запоминается в одну и ту же ячейку памяти даты 5 может быть выполнен на базе • ДГРпосл, то в памяти будет находиться только микропроцессорного комплекта серии К580 последнее введенное значение. Значе-• (или К1810), обеспечивающего выполнение ние же времени при последующих вводах не необходимых действий с входными величи- 35 запоминается, так как в этом случае являетнами и позволяющего реализовать преобрася важным только осредненное значение зования их значений. времени (ТГРср), которое тоже поступает в Смысл работы предлагаемого устройства этот блок. состоит в автоматическом определении Значение ДГР вырабатывается по слепоправки компаса для последующего учета 40 дующим принципам: ее в навигационных целях. 1. При единичном вводе значения пе В судовождении измерение угловых ве - ленга - выходное значение ДГР принимает личин производится с помощью компаса или же значение даты, запомненное при первом построенного на его основе пеленгатора . вводе (т.е. ДГР 1). Показания компаса, кроме неизбежной инс- 45 2. При нескольких вводах пеленга, но трументальной погрешности, содержат еще и без осреднения - параметр ДГР принимает переменную составляющую погрешности , значение даты, введенное при последнем которая зависит от следующих факторов: вводе (т.е. из ячейки ДГРпосл). - скорости движения судна; 3. При нескольких измерениях пеленга - истинного курса судна; 50 после осреднения значений в блоке осред - географической широты места судна. нения, параметр ДГР может принимать зна Для компенсации этой составляющей чения: погрешности и производится определение а) из ячейки ДГР1, если значение ТГРср поправки компаса, которая представляет собой в процессе ввода данных не превысило 24 разность между расчетным (принимав- 55 мым часов (что соответствует "старой" дате); за истинное) и измеренным значениями пеленга б) из ячейки ДГРпосл, если значение Солнца, определенными на судне в одно и тоже ТГРср соответствует времени следующих время. после первого ввода суток (т.е. "новой" даОпределенное таким образом значение те). поправки компаса выдается на индикацию. Выработанное таким образом значение гринвичской даты ДГР через первый инфор 15602 мационный выход блока выработки даты поступает на первый информационный вход блока определения поправки компаса. Работает предлагаемое устройство сле дующим образом. 10 установки в состояние "логический 0" 8 - при выполнении условия логического сравнения, либо на второй выход, соединенный со входом четвертого логического порога 16 при невыполнении условия. В первом элементе установки в "логиче5 ский 0" 8 признаку ввода пеленга (ПРВВП) Значение пеленга Солнца (ПЕЛ) с ин присваивается нулевое значение, затем в формационного выхода датчика пеленга 1 инкременте 9 значение счетчика вводов пепоступает на первый информационный вход ленга увеличивается на единицу, а во втором блока осреднения пеленга, координат и вре логическом пороге 10 производится анализ мени 4, в котором оно запоминается. 10 содержимого этого счетчика на "1" и выходС управляющего выхода датчика пеленга 1 ной управляющий сигнал подается либо на значение признака ввода пеленга (ПРВВП) первый его выход, соединенный с первым поступает на входы двух датчиков элементом записи 11 - при выполнении ус(работающих независимо и непрерывно): ловия логического сравнения, либо на втодатчика координат судна 2 и датчика текуще- 15 рой выход, соединенный со входом третьего го гринвичского времени и даты 3, в которых логического порога 14 - при невыполнении производится анализ значения этого признака, условия. и в случае равенства его" 1" выдаются значения При поступлении управляющего сигнапараметров, соответствующие моменту ла на первый вход первого элемента записи запоминания значения пеленга ПЕЛ: 20 датчик 11 (что соответствует первому вводу пеленкоординат 2 - значения координат судна (Ш и га), в нем в ячейку памяти ДГР1 запоминаетД) - на второй информационный вход блока ся значение текущей гринвичской даты осреднения 4, датчик времени 3 (ДГРтек), поступающее на второй (информа- значения текущего гринвичского времени ционный) вход этого элемента с информаци(ТГРтек) через свой информационный выход 25 онно-управляющего выхода датчика - на третий информационный вход блока ос текущего гринвичского времени и даты 3. С реднения 4, а значение гринвичской даты выхода 11 элемента управляющий сигнал (ДГРтек) и значение ПРВВП - через свой поступает на первый вход второго элемента информационно-управляющий выход - на записи 12, куда через второй вход (информаинформационно-управляющий вход блока 30 ционный) поступает текущее значение гринвыработки гринвичской даты 5. вичского времени (ТГРтек) с выхода блока В блоке осреднения 4 введенные значеосреднения 4, и его значение запоминается ния Ш, Д и ТГРтек запоминаются в соответв ячейку ТГР1. ствующие ячейки памяти. При поступлении управляющего сигнаПосле выполнения нескольких измере- 35 ла с выхода 12 элемента на вход третьего ний пеленга и ввода соответствующих им элемента записи 13, в выходную ячейку ДГР значений координат и времени в блоке ос запоминается значение даты, запомненное реднения 4 производится осреднение их при первом вводе пеленга, т.е. из ячейки значений и присвоение признаку осредне ДГР1. Выходное значение выдается на перния (ПРОСР) значения "1". Осредненные 40 вый информационный выход блока выработзначения пеленга, координат и соответству ки даты 5. ющих значений времени, а также значение При поступлении управляющего сигнапризнака осреднения и текущего времени ла на вход третьего логического порога 14 (в поступают на информационный вход блока случае непервого ввода пеленга), в нем провыработки гринвичской даты 5. 45 изводится сравнение содержимого счетчика В блоке выработки гринвичской даты 5 вводов пеленга с максимальным количестосуществляется определение значения вом, равным 5, и выходной управляющий гринвичской даты (ДГР), соответствующего сигнал подается либо на первый его выход, моменту ввода значений всех остальных па соединенный с первым входом четвертого раметров. 50 элемента записи 15 - при выполнении услоРаботает предлагаемый блок выработки вия логического сравнения, либо на второй гринвичской даты 5 следующим образом. выход, соединенный со входом четвертого С информационно-управляющего выхода логического порога 16 - при невыполнении датчика текущего времени и даты 3 на вход условия. первого логического порога 7 поступа- 55 ет В четвертом элементе записи 15, при значение признака ввода пеленга поступлении на его первый вход управляю(ПРВВП), где производится сравнение его щего сигнала, осуществляется запоминание значения с "1й, и выходной управляющий в ячейку ДГРпосл значения текущей гринсигнал подается либо на первый его выход, соединенный со входом первого элемента 11 15602 вичской даты (ДГРтек), поступающего на второй (информационный) вход элемента с информационно-управляющего выхода датчика 3. Управляющий сигнал с выхода этого 5 элемента поступает на первый вход четвертого логического порога 16, где происходит сравнение с "1й значения признака осреднения (ПРОСР), поступающего на второй (информационный) вход этого же элемента с 10 выхода блока осреднения 4. Управляющий сигнал, выработанный этим элементом, поступает либо на первый его выход, соединенный со входом второго элемента установки в "логический 0" 17 - при выпол- 15 нении условия сравнения, либо на второй выход, соединенный с пятым элементом записи 20 - при невыполнении условия. При поступлении управляющего сигнала на вход второго элемента установки в 20 "логический 0" 17 в нем признаку осреднения (ПРОСР) присваивается нулевое значение, а управляющий сигнал с выхода его поступает на вход элемента сброса в исходное состояние 18, в котором счетчик ввода 25 пеленга сбрасывается в нулевое состояние. С выхода 18 элемента управляющий сигнал поступает на первый вход пятого логического порога 19, на второй 30 12 (информационный) вход которого поступает с выхода блока осреднения 4 осредненное значение гринвичского времени (ТГРср) и его значение сравнивается с хранящимся значением в ячейке ТГР1. Управляющий сигнал, вырабатываемый этим элементом, поступает либо на первый его выход, соединенный со входом третьего элемента записи 13 - при невыполнении условия сравнения, либо на второй выход, соединенный с пятым элементом записи 20 при выполнении условия. При поступлении управляющего сигнала на вход пятого элемента записи 20 в выходную ячейку памяти ДГР запоминается значение даты из ячейки ДГРпосл, которое выдается на первый информационный выход блока выработки даты 5. Выработанное значение гринвичской даты с первого информационного выхода этого блока поступает на первый информационный вход блока определения поправки компаса 6, на второй информационный вход которого со второго выхода блока 5 поступают значения всех остальных параметров (ПЕЛср, Шср, Дер, ТГРср, ТГРтек и ПРОСР), необходимых для определения значения поправки компаса. 15602 датчик пеленга I ИНФВЫХ. УПР. ВЫХ. ПЕ Л ПРВВП датчик координат судна 2 датчик текущего гринвичского времени и даты 3 ИНФ.ВЧ1 тгртек 1 2 3 ИНФ. ВХОДЫ сР 11Г блок осреднения пеленга, координат и времени 4 HPOCg I I I ИНер. fc*. ИНФ.-УПР.ВХ. блок выработки гринвичской латы ИНФ&ЫХ.1 ДГР і' ИНФ. 5 2 ИНФ. вьиг. ПРОСР, ПЄЛдР г ВХОДЫ * ТГрт¥к блок определения поправки компаса 6 Фиг. I ВЫ У. дГрТЕК ПРВВП 15602 .fy *« из 1* . I НЕТ Т R 8 нет нет ЙІ 10 14 АГ? z Т WR « 1 15 тек ПРОСР ТГР НЕТ 16 н R ТГР 17 18 СР 1 НЕТ V
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for compass error autodetection
Автори англійськоюZhmak Anatolii Hryhorovych
Назва патенту російськоюУстройство автоматического определения поправки компаса
Автори російськоюЖмак Анатолий Григорьевич
МПК / Мітки
МПК: G06G 7/78
Мітки: визначення, пристрій, компаса, поправки, автоматичного
Код посилання
<a href="https://ua.patents.su/9-15602-pristrijj-avtomatichnogo-viznachennya-popravki-kompasa.html" target="_blank" rel="follow" title="База патентів України">Пристрій автоматичного визначення поправки компаса</a>
Пристрій для автоматичного визначення часу фільтрування
Номер патенту: 101
Опубліковано: 30.04.1993
Автор: Воробйов Євгеній Ігоревич
МПК: B01D 37/00
Мітки: фільтрування, автоматичного, часу, пристрій, визначення
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я Устройство для автоматического определения времени фильтрования, содержащее расходомер, установленный на выходном продуктопроводе, интегратор, вход которого связан с выходом расходомера, сумматор, выход которого соединен через нулевое реле с запорным органом на входе фильтра, и блок умножения, первый вход которого связан с выходом блока нелинейности, а выход — с первым входом сумматора, второй вход...
Пристрій автоматичного управління виїмкової машини
Номер патенту: 7573
Опубліковано: 29.09.1995
Автори: Жданов Костянтин Федорович, Сілаєв Віктор Іванович, Поволоцький Сергій Олександрович, Сірченко Володимир Миколаєвич
МПК: E21C 35/24
Мітки: виїмкової, пристрій, машини, управління, автоматичного
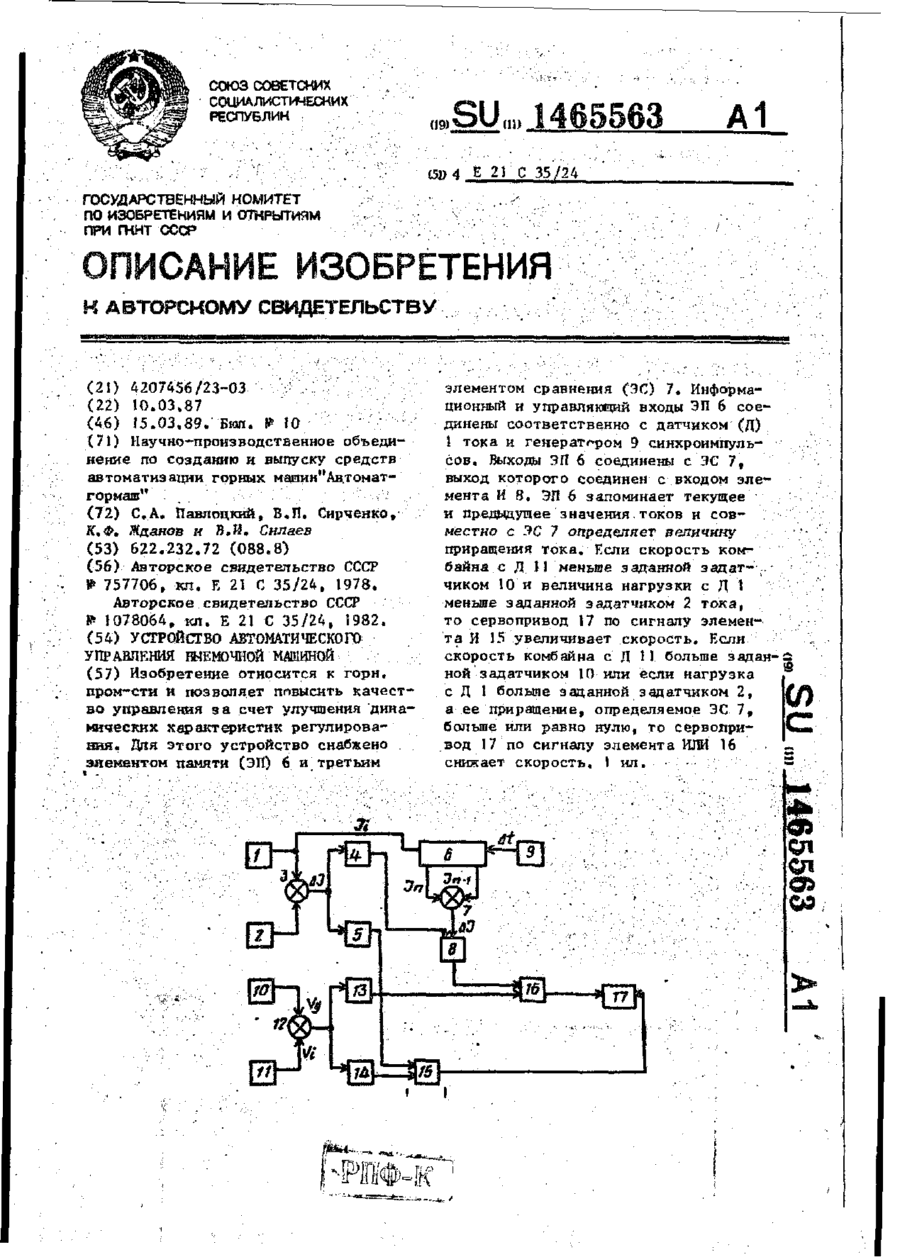
Формула / Реферат:
Устройство автоматического управления выемочной машиной, содержащее датчик и задатчик тока, соединенные с первым элементом сравнения, выход которого через первый и второй пороговые элементы соединен с первыми входами соответственно первого и второго элементов И, датчик и задатчик скорости, соединенные с вторым элементом сравнения, выход которого через третий и четвертый пороговые элементы соединен соответственно с вторым входом второго...
Формувач імпульсів
Номер патенту: 4468
Опубліковано: 27.12.1994
Автори: Баран Петро Миколаєвич, Бугайчук Олексій Анатолієвич
МПК: H03K 5/153
Формула / Реферат:
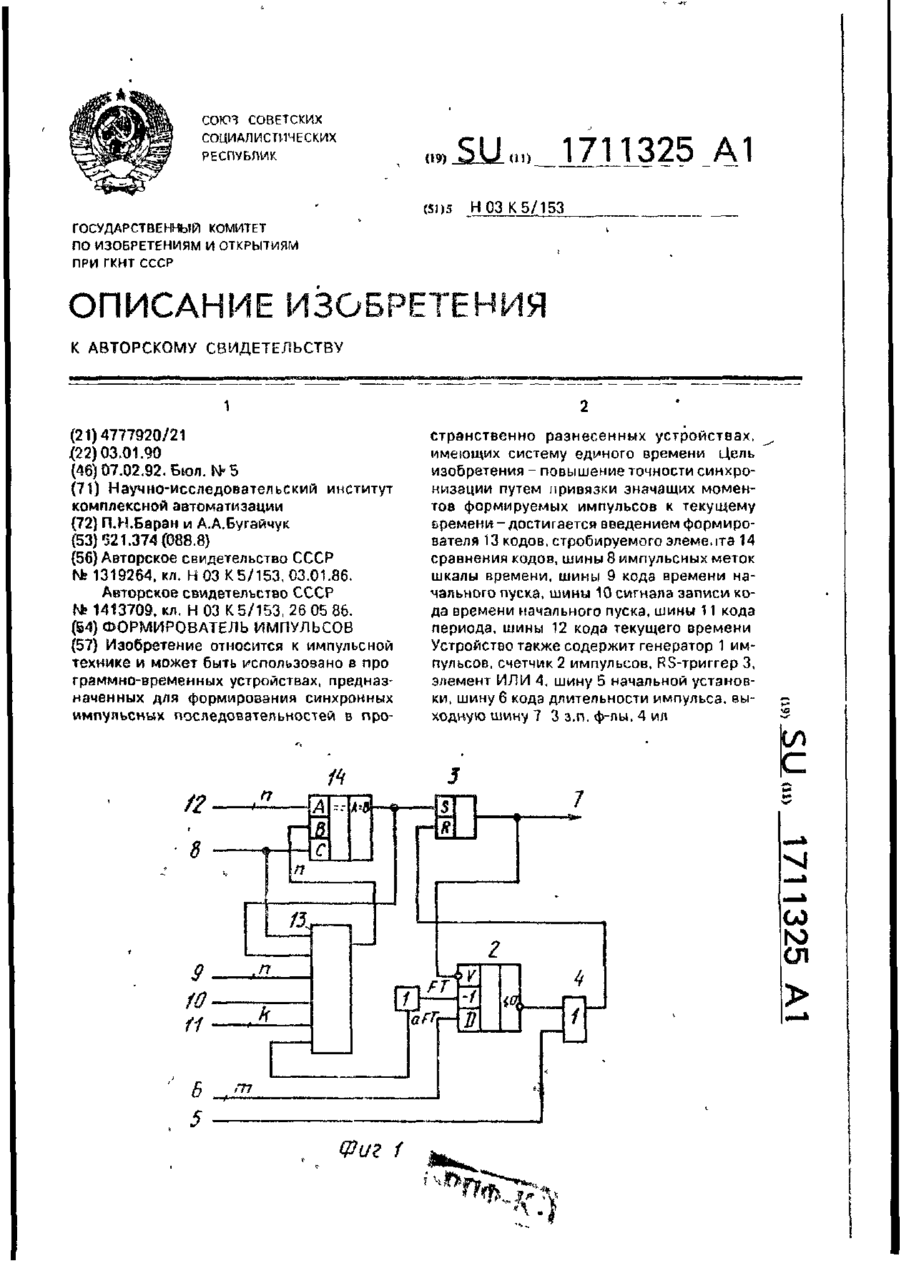
1. Формирователь импульсов, содержащий генератор импульсов, первый выход которого соединен со счетным входом счетчика импульсов, RS-триггер, элемент ИЛИ, шину начальной установки, шину кода длительности импульса, выходную шину, отличающийся тем, что, с целью повышения точности синхронизации путем привязки значащих моментов формируемых импульсов к текущему времени, в него введены шина импульсных меток шкалы времени, шина кода времени...
Пристрій для визначення затримки при кореляційному аналізу випадкових процесів
Номер патенту: 11994
Опубліковано: 25.12.1996
Автор: Цепков Геннадій Васильович
Мітки: пристрій, кореляційному, визначення, випадкових, аналізу, процесів, затримки
Формула / Реферат:
Устройство для определения задержки при корреляционном анализе случайных процессов, содержащее элемент дифференцирования, вход которого является первым информационным входом устройства, генератор тактовых импульсов и счетчик, отличающееся тем, что, с целью повышения быстродействия, в него введены коммутатор, блок памяти и элемент сравнения, первый вход которого соединен с выходом элемента дифференцирования, а второй вход - с шиной нулевого...
Пристрій автоматичного управління виїмковою машиною
Номер патенту: 7597
Опубліковано: 29.09.1995
Автори: Бакуменко Володимир Степанович, Захаров Володимир Миколаєвич, Кіріченко Костянтин Іванович, Сірченко Володимир Миколайович, Клименко Володимир Іванович
МПК: E21C 35/24
Мітки: пристрій, управління, виїмковою, машиною, автоматичного
Формула / Реферат:
Устройство автоматического управления выемочной машиной, содержащее датчик и задатчик нагрузки, подключенные к соответствующим входам первого блока сравнения, выход которого соединен с входами релейного элемента недогрузки и релейного элемента перегрузки, выход последнего подключен к первому входу первого блока выделения наименьшего сигнала, второй и третий входы которого подключены к задатчику скорости подачи и реле времени уменьшения...
Попередній патент: Спосіб виготовлення коритних гнутих профілів
Наступний патент: Пристрій для гідростатичного волочіння виробів
Випадковий патент: Вершковий крем