Система дистанційного керування охороною й обороною об`єктів
Номер патенту: 30641
Опубліковано: 11.03.2008
Автори: Жованик Борис Євгенійович, Сендецький Микола Миколайович, Лотоха Людмила Михайлівна, Андрійченко Олег Станіславович, Іванов Борис Павлович, Кручінін Сергій Володимирович, Комаров Володимир Олександрович, Наумов Олександр Миколайович, Мельник Олександр Дмитрович, Лапицький Сергій Володимирович, Турчин Валентин Миколайович, Машталір Вадим Віталійович, Василенко Олександр Васильович

Формула / Реферат
1. Система дистанційного керування охороною й обороною об'єктів, що містить одну, дві або більше одиниць стрілецької зброї з дистанційним керуванням і боєкомплектом, аналогічну за кількістю одиниць зброї кількість відеокамер, установлених співвісно зі зброєю, приводів вертикального та горизонтального переміщення зброї, приводів спускових механізмів зброї, керуючих приймально-передавальних пристроїв і блоків розподілу команд, а також пристрій керування системою та монітор оператора, при цьому приводи вертикального та горизонтального переміщення зброї, приводи спускових механізмів зброї, керуючі приймально-передавальні пристрої та монітор оператора з'єднані каналами зв'язку із пристроєм керування системою, причому приводи спускових механізмів зброї з'єднані механічним зв'язком з гашетками спускових механізмів зброї, згадані приводи спускових механізмів зброї, відеокамери і приводи вертикального та горизонтального переміщення зброї з'єднані із пристроєм керування системою послідовно через блок розподілу команд і керуючий приймально-передавальний пристрій, яка відрізняється тим, що вона додатково містить радіолокаційну станцію виявлення цілі з механізмом повороту на 360°, пристрій підсвічування цілі в оптичному діапазоні хвиль, пристрій підсвічування цілі в інфрачервоному діапазоні хвиль, пристрій автоматичного розпізнавання цілі, пристрій відеозапису та додатковий блок розподілу команд, при цьому відеокамера, одиниця стрілецької зброї, пристрій підсвічування цілі в оптичному діапазоні хвиль, пристрій підсвічування цілі в інфрачервоному діапазоні хвиль, приводи спускових механізмів зброї, блок розподілу команд і керуючий приймально-передавальний пристрій розміщені на платформі, згадана платформа закріплена на приводах вертикального та горизонтального переміщення зброї, приводи вертикального та горизонтального переміщення зброї закріплені на силовій основі, що юстирується по горизонту, радіолокаційна станція виявлення цілі встановлена на стабілізованій платформі, стабілізована платформа радіолокаційної станції виявлення цілі встановлена на силовій основі, що юстирується по горизонту, причому згадані силові основи виконані або стаціонарними, або в мобільному варіанті, пристрій підсвічування цілі в оптичному діапазоні хвиль і пристрій підсвічування цілі в інфрачервоному діапазоні хвиль з'єднані із пристроємкерування системою послідовно через блок розподілу команд і керуючий приймально-передавальний пристрій, радіолокаційна станція виявлення цілі та пристрій автоматичного розпізнавання цілі з'єднані з пристроєм керування системою каналами зворотного зв'язку, згадана радіолокаційна станція виявлення цілі з'єднана із пристроєм автоматичного розпізнавання цілі, а кожна відеокамера з'єднана каналом зв'язку із пристроєм відеозапису через додатковий блок розподілу команд.
2. Система за п. 1, яка відрізняється тим, що платформа виконана з можливістю відхилення в площинах відносно приводів вертикального та горизонтального переміщення зброї й місця закріплення цих приводів на силовій основі.
3. Система за п. 1, яка відрізняється тим, що канал зв'язку виконаний або провідним, або радіо.
4. Система за п. 1, яка відрізняється тим, що радіолокаційна станція виявлення цілі виконана з можливістю відображення дальності виявлених цілей та їх пеленгації із вказівкою номера цілі при кількості цілей дві чи більше.
5. Система за п. 1 і п. 4, яка відрізняється тим, що радіолокаційна станція виявлення цілі виконана з можливістю класифікації цілі по характерному звуковому фарбуванню спектра сигналу.
6. Система за п. 1 і пп. 4, 5, яка відрізняється тим, що радіолокаційна станція виявлення цілі виконана з малою потужністю випромінювання 0,01-1,0 Вт при безперервному випромінюванні в міліметровому діапазоні й з кодовою модуляцією.
7. Система за п. 1, яка відрізняється тим, що обертання антенної системи радіолокаційної станції виявлення цілі та її горизонтування здійснюється п'єзоелектричними, безредукторними, реверсивними самогальмівними електродвигунами.
8. Система за п. 1, яка відрізняється тим, що блок розподілу команд виконаний у вигляді мультиплексора.
9. Система за п. 1, яка відрізняється тим, що пристрій керування системою виконано у вигляді комп'ютера.
10. Система за п. 1, яка відрізняється тим, що пристрій відеозапису з'єднано з монітором через пристрій керування системою.
11. Система за п. 1, яка відрізняється тим, що радіолокаційна станція виявлення цілі з'єднана з пристроєм керування системою послідовно через блок розподілу команд і керуючий приймально-передавальний пристрій за допомогою каналу зворотного зв'язку.
Текст
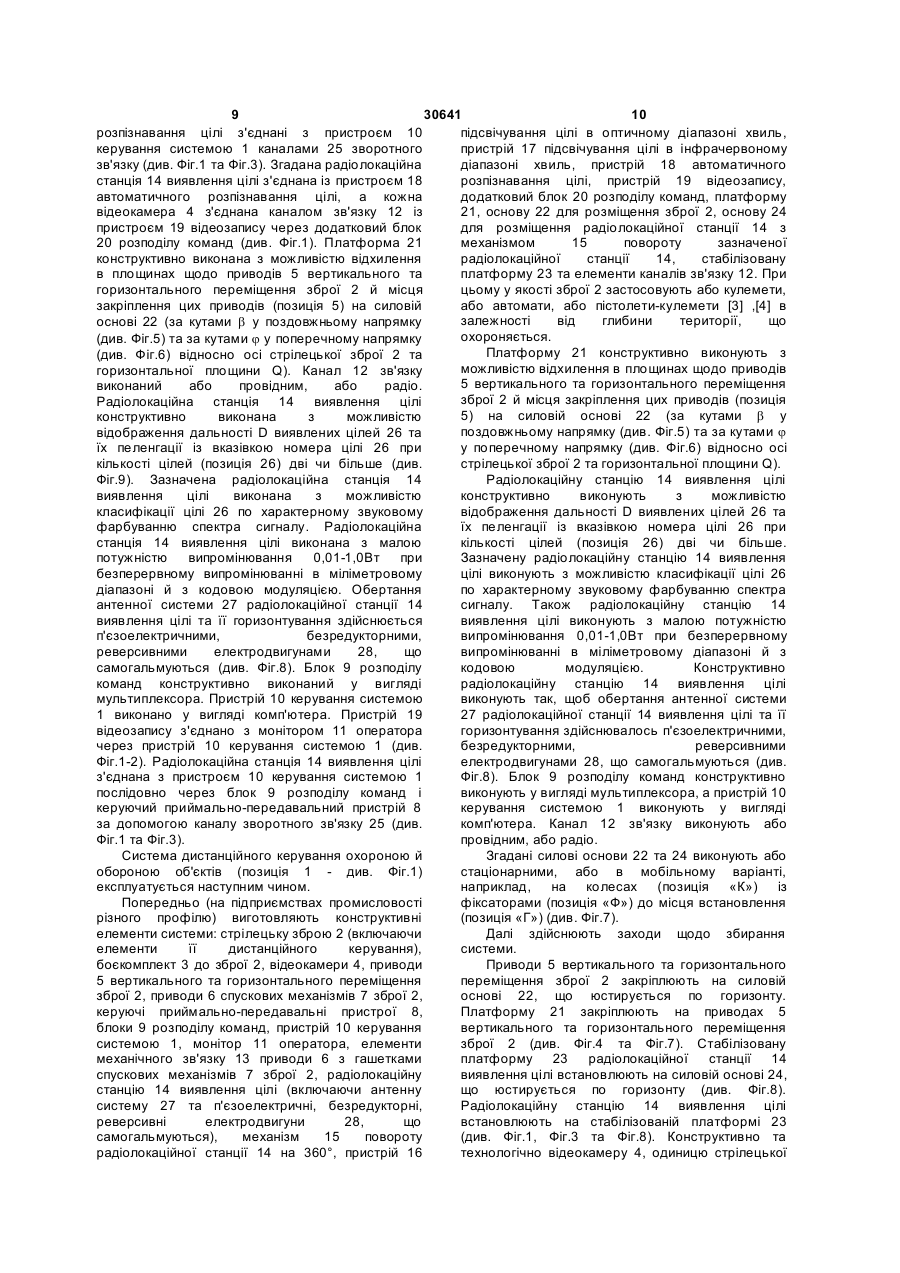
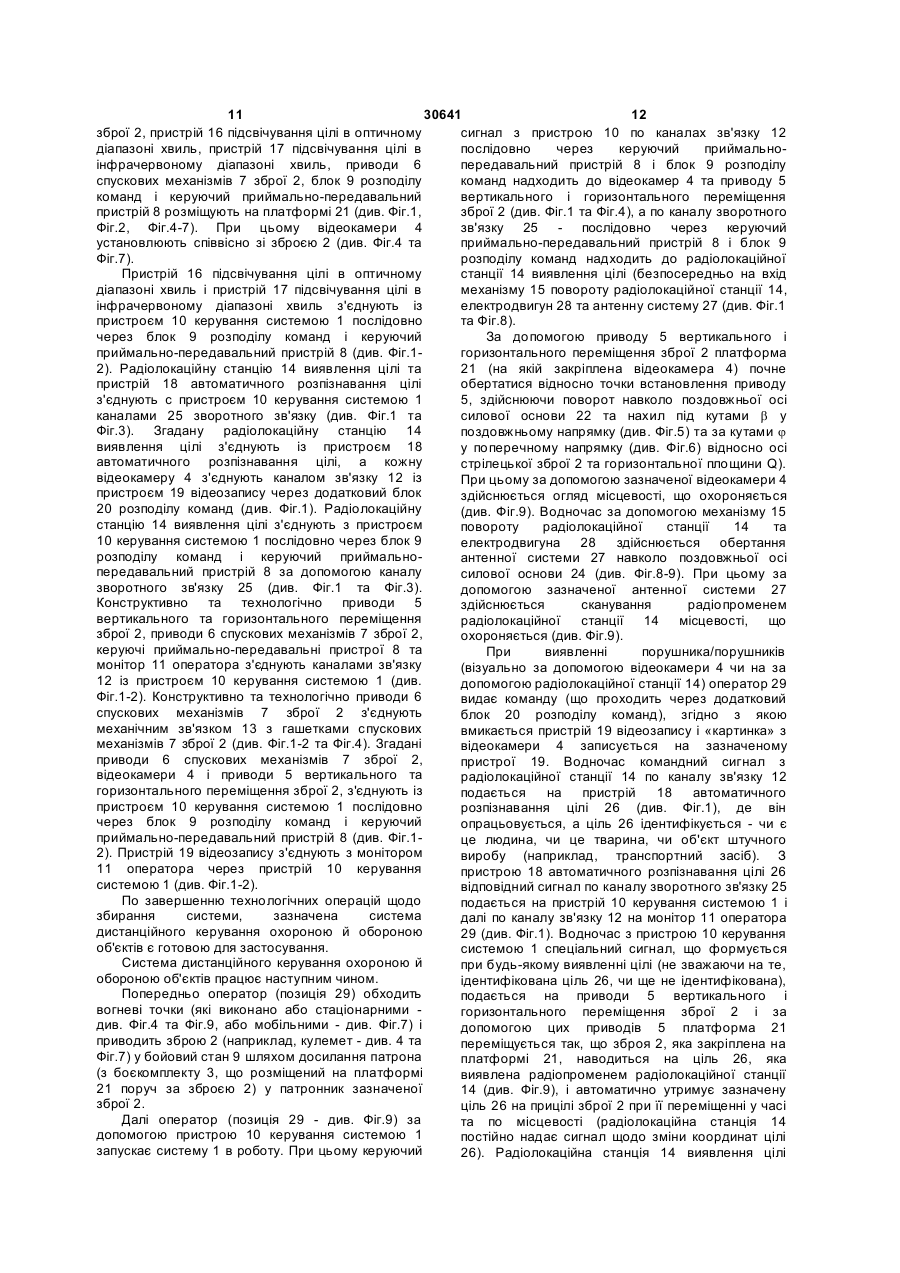
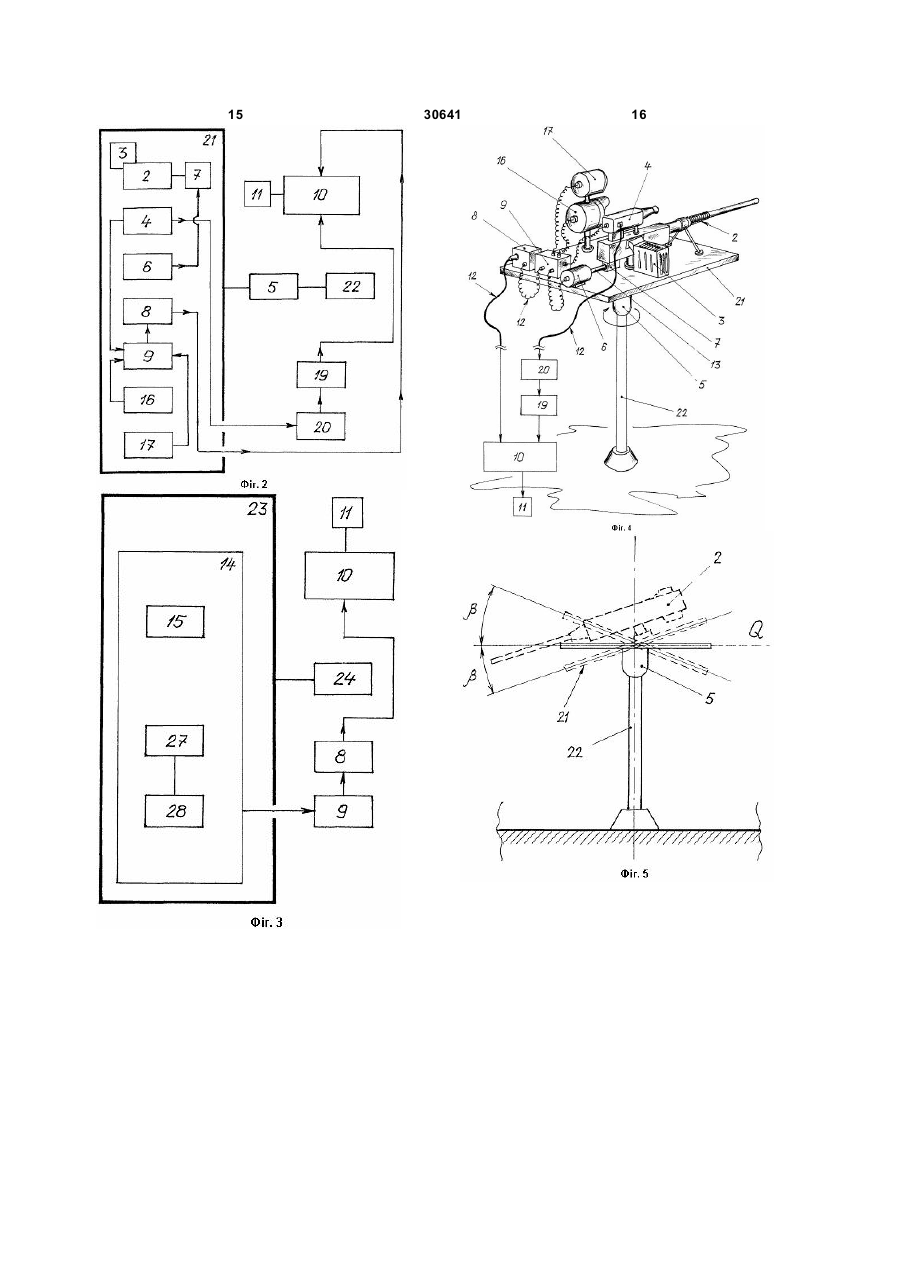
1. Система дистанційного керування охороною й обороною об'єктів, що містить одну, дві або більше одиниць стрілецької зброї з дистанційним керуванням і боєкомплектом, аналогічну за кількістю одиниць зброї кількість відеокамер, установлених співвісно зі зброєю, приводів вертикального та горизонтального переміщення зброї, приводів спускових механізмів зброї, керуючих приймально-передавальних пристроїв і блоків розподілу команд, а також пристрій керування системою та монітор оператора, при цьому приводи вертикального та горизонтального переміщення зброї, приводи спускових механізмів зброї, керуючі приймальнопередавальні пристрої та монітор оператора з'єднані каналами зв'язку із пристроєм керування системою, причому приводи спускових механізмів зброї з'єднані механічним зв'язком з гашетками спускових механізмів зброї, згадані приводи спускових механізмів зброї, відеокамери і приводи вертикального та горизонтального переміщення зброї з'єднані із пристроєм керування системою послідовно через блок розподілу команд і керуючий приймально-передавальний пристрій, яка відрізняється тим, що вона додатково містить радіолокаційну станцію виявлення цілі з механізмом повороту на 360°, пристрій підсвічування цілі в оптичному діапазоні хвиль, 2 (19) 1 3 30641 4 8. Система за п. 1, яка відрізняється тим, що 5. Система за п. 1 і п. 4, яка відрізняється тим, блок розподілу команд виконаний у вигляді що радіолокаційна станція виявлення цілі мультиплексора. виконана з можливістю класифікації цілі по 9. Система за п. 1, яка відрізняється тим, що характерному звуковому фарбуванню спектра пристрій керування системою виконано у вигляді сигналу. комп'ютера. 6. Система за п. 1 і пп. 4, 5, яка відрізняється 10. Система за п. 1, яка відрізняється тим, що тим, що радіолокаційна станція виявлення цілі пристрій відеозапису з'єднано з монітором через виконана з малою потужністю випромінювання пристрій керування системою. 0,01-1,0 Вт при безперервному випромінюванні в 11. Система за п. 1, яка відрізняється тим, що міліметровому діапазоні й з кодовою модуляцією. радіолокаційна станція виявлення цілі з'єднана з 7. Система за п. 1, яка відрізняється тим, що пристроєм керування системою послідовно через обертання антенної системи радіолокаційної блок розподілу команд і керуючий приймальностанції виявлення цілі та її горизонтування передавальний пристрій за допомогою каналу здійснюється п'єзоелектричними, зворотного зв'язку. безредукторними, реверсивними самогальмівними електродвигунами. Корисна модель відноситься до галузі озброєння, зокрема, до систем охорони, а саме, до систем дистанційного керування охороною й обороною об'єктів. Відома система дистанційного керування охороною об'єктів, що містить одну, дві або більше одиниці відеокамер, приводи вертикального та горизонтального переміщення відеокамер, керуючі приймально-передавальні пристрої, а також пристрій керування системою та монітор оператора, при цьому відеокамери, приводи вертикального та горизонтального переміщення відеокамер, приймально-передавальні пристрої та монітор оператора з'єднані каналами зв'язку із пристроєм керування системою, причому відеокамери і приводи вертикального та горизонтального переміщення відеокамер з'єднані із пристроєм керування системою послідовно через керуючий приймально-передавальний [1]. До недоліків відомої системи відноситься те, що використання відеокамер у темний час доби, а також у тумані або при використанні нападаючими димових завіс - не ефективно. До недоліків відомої системи, що обрана за прототип, відноситься й те, що при поганій видимості неможливо правильно ідентифікувати ціль - або це тварина, або це людина. До недоліків відомої системи, що обрана за прототип, відноситься також й те, що система тільки виявляє порушення межі об'єкта, що охороняється, але не може зупинити (чи знищити) порушника. Найбільш близьким технічним рішенням, як по суті, так і по задачах, що вирішуються, яке обрано за прототип (найближчий аналог), є система дистанційного керування охороною й обороною об'єктів, що містить одну, дві або більше одиниці стрілецької зброї з дистанційним керуванням і боєкомплектом, аналогічну по кількості одиниць зброї кількість відеокамер, установлених співвісно зі зброєю, приводів вертикального та горизонтального переміщення зброї, приводів спускових механізмів зброї, керуючих приймальнопередавальних пристроїв і блоків розподілу команд, а також пристрій керування системою та монітор оператора, при цьому приводи вертикального та горизонтального переміщення зброї, приводи спускових механізмів зброї, керуючі приймально-передавальні пристрої та монітор оператора з'єднані каналами зв'язку із пристроєм керування системою, причому приводи спускових механізмів зброї з'єднані механічним зв'язком з гашетками спускових механізмів зброї, згадані приводи спускових механізмів зброї, відеокамери і приводи вертикального та горизонтального переміщення зброї з'єднані із пристроєм керування системою послідовно через керуючий приймально-передавальний пристрій і блок розподілу команд [2]. До недоліків відомої системи, що обрана за прототип, відноситься те, що використання відеокамер у темний час доби, а також у тумані або при використанні нападаючими димових завіс - не ефективно. До недоліків відомої системи, що обрана за прототип, відноситься й те, що при поганій видимості неможливо правильно ідентифікувати ціль - або це тварина, або це людина. В основу корисної моделі покладена задача шляхом включення до системи радіолокаційної станції виявлення цілей і пристроїв підсвічування цілей в оптичному й інфрачервоному діапазоні хвиль забезпечити підвищення ефективності виявлення й знищення цілі у будь-яких метеоумовах, при відсутності оптичної видимості та у будь-який час доби й року. Суть корисної моделі в системі дистанційного керування охороною й обороною об'єктів, що містить одну, дві або більше одиниці стрілецької зброї з дистанційним керуванням і боєкомплектом, аналогічну по кількості одиниць зброї кількість відеокамер, установлених співвісно зі зброєю, приводів вертикального та горизонтального переміщення зброї, приводів спускових механізмів зброї, керуючих приймально-передавальних пристроїв і блоків розподілу команд, а також пристрій керування системою та монітор оператора, при цьому приводи вертикального та горизонтального переміщення зброї, приводи спускових механізмів зброї, керуючі приймальнопередавальні пристрої та монітор оператора з'єднані каналами зв'язку із пристроєм керування системою, причому приводи спускових механізмів 5 30641 6 зброї з'єднані механічним зв'язком з гашетками самогальмуються, блок розподілу команд спускових механізмів зброї, згадані приводи виконаний у вигляді мультиплексора, пристрій спускових механізмів зброї, відеокамери і приводи керування системою виконано у вигляді вертикального та горизонтального переміщення комп'ютера, пристрій відеозапису з'єднано з зброї, з'єднані із пристроєм керування системою монітором оператора через пристрій керування послідовно через блок розподілу команд і системою, а радіолокаційна станція виявлення цілі керуючий приймально-передавальний пристрій, з'єднана з пристроєм керування системою полягає в тому, що вона додатково містить послідовно через блок розподілу команд і радіолокаційну станцію виявлення цілі з керуючий приймально-передавальний пристрій за механізмом повороту на 360°, пристрій допомогою каналу зворотного зв'язку. підсвічування цілі в оптичному діапазоні хвиль, Порівняльний аналіз технічного рішення, що пристрій підсвічування цілі в інфрачервоному заявляється, з прототипом показує, що система діапазоні хвиль, пристрій автоматичного дистанційного керування охороною й обороною розпізнавання цілі, пристрій відеозапису та об'єктів, яка заявляється, відрізняється тим, що додатковий блок розподілу команд. Суть корисної вона додатково містить радіолокаційну станцію моделі полягає і в тому, що відеокамера, одиниця виявлення цілі з механізмом повороту на 360°, стрілецької зброї, пристрій підсвічування цілі в пристрій підсвічування цілі в оптичному діапазоні оптичному діапазоні хвиль, пристрій підсвічування хвиль, пристрій підсвічування цілі в цілі в інфрачервоному діапазоні хвиль, приводи інфрачервоному діапазоні хвиль, пристрій спускових механізмів зброї, блок розподілу команд автоматичного розпізнавання цілі, пристрій і керуючий приймально-передавальний пристрій відеозапису та додатковий блок розподілу команд, розміщені на платформі, згадана платформа при цьому відеокамера, одиниця стрілецької зброї, закріплена на приводах вертикального та пристрій підсвічування цілі в оптичному діапазоні горизонтального переміщення зброї, приводи хвиль, пристрій підсвічування цілі в вертикального та горизонтального переміщення інфрачервоному діапазоні хвиль, приводи зброї закріплені на силовій основі, що юстирується спускових механізмів зброї, блок розподілу команд по горизонту, радіолокаційна станція виявлення і керуючий приймально-передавальний пристрій 8 цілі встановлена на стабілізованій платформі, розміщені на платформі, згадана платформа стабілізована платформа радіолокаційної станції закріплена на приводах вертикального та виявлення цілі встановлена на силовій основі, що горизонтального переміщення зброї, приводи юстирується по горизонту. Суть корисної моделі вертикального та горизонтального переміщення полягає також і в тому, що згадані силові основи зброї закріплені на силовій основі, що юстирується виконані або стаціонарними, або в мобільному по горизонту, радіолокаційна станція виявлення варіанті, пристрій підсвічування цілі в оптичному цілі встановлена на стабілізованій платформі, діапазоні хвиль і пристрій підсвічування цілі в стабілізована платформа радіолокаційної станції інфрачервоному діапазоні хвиль з'єднані із виявлення цілі встановлена на силовій основі, що пристроєм керування системою послідовно через юстирується по горизонту, причому згадані силові блок розподілу команд і керуючий приймальнооснови виконані або стаціонарними, або в передавальний пристрій, радіолокаційна станція мобільному варіанті, пристрій підсвічування цілі в виявлення цілі та пристрій автоматичного оптичному діапазоні хвиль і пристрій підсвічування розпізнавання цілі з'єднані з пристроєм керування цілі в інфрачервоному діапазоні хвиль з'єднані із системою каналами зворотного зв'язку, згадана пристроєм керування системою послідовно через радіолокаційна станція виявлення цілі з'єднана із блок розподілу команд і керуючий приймальнопристроєм автоматичного розпізнавання цілі, передавальний пристрій, радіолокаційна станція кожна відеокамера з'єднана каналом зв'язку із виявлення цілі та пристрій автоматичного пристроєм відеозапису через додатковий блок розпізнавання цілі з'єднані з пристроєм керування розподілу команд, платформа виконана з системою каналами зворотного зв'язку, згадана можливістю відхилення в площинах щодо приводів радіолокаційна станція виявлення цілі з'єднана із вертикального та горизонтального переміщення пристроєм автоматичного розпізнавання цілі, зброї й місця закріплення цих приводів на силовій кожна відеокамера з'єднана каналом зв'язку із основі, канал зв'язку виконаний або провідним, пристроєм відеозапису через додатковий блок або радіо, радіолокаційна станція виявлення цілі розподілу команд, платформа виконана з виконана з можливістю відображення дальності можливістю відхилення в площинах щодо приводів виявлених цілей та їх пеленгації із вказівкою вертикального та горизонтального переміщення номера цілі при кількості цілей дві чи більше, зброї й місця закріплення цих приводів на силовій радіолокаційна станція виявлення цілі виконана з основі, канал зв'язку виконаний або провідним, можливістю класифікації цілі по характерному або радіо, радіолокаційна станція виявлення цілі звуковому фарбуванню спектра сигналу, виконана з можливістю відображення дальності радіолокаційна станція виявлення цілі виконана з виявлених цілей та їх пеленгації із вказівкою малою потужністю випромінювання 0,01-1,0Вт при номера цілі при кількості цілей дві чи більше, безперервному випромінюванні в міліметровому радіолокаційна станція виявлення цілі виконана з діапазоні й з кодовою модуляцією, обертання можливістю класифікації цілі по характерному антенної системи радіолокаційної станції звуковому фарбуванню спектра сигналу, виявлення цілі та її горизонтування здійснюється радіолокаційна станція виявлення цілі виконана з п'єзоелектричними, безредукторними, малою потужністю випромінювання 0,01-1,0Вт при реверсивними електродвигунами, що безперервному випромінюванні в міліметровому 7 30641 8 діапазоні й з кодовою модуляцією, обертання обороною об'єктів також містить аналогічну по антенної системи радіолокаційної станції кількості одиниць зброї 2 кількість відеокамер 4, виявлення цілі та її горизонтування здійснюється установлених співвісно зі зброєю 2, приводів 5 п'єзоелектричними, безредукторними, вертикального та горизонтального переміщення реверсивними електродвигунами, що зброї 2, приводів 6 спускових механізмів 7 зброї 2, самогальмуються, блок розподілу команд керуючих приймально-передавальних пристроїв 8 виконаний у вигляді мультиплексора, пристрій і блоків 9 розподілу команд, а також пристрій 10 керування системою виконано у вигляді керування системою 1 та монітор 11 оператора комп'ютера, пристрій відеозапису з'єднано з (див. Фіг.1). Конструктивно татехнологічно монітором оператора через пристрій керування приводи 5 вертикального та горизонтального системою, а радіолокаційна станція виявлення цілі переміщення зброї 2, приводи 6 спускових з'єднана з пристроєм керування системою механізмів 7 зброї 2, керуючі приймальнопослідовно через блок розподілу команд і передавальні пристрої 8 та монітор 11 оператора керуючий приймально-передавальний пристрій за з'єднані каналами зв'язку 12 із пристроєм 10 допомогою каналу зворотного зв'язку. керування системою 1 (див. Фіг.1-2). Таким чином технічне рішення, яке Конструктивно та технологічно приводи 6 заявляється, відповідає критерію корисної моделі спускових механізмів 7 зброї 2 з'єднані механічним «новизна». зв'язком 13 з гашетками спускових механізмів 7 Суть корисної моделі пояснюється зброї 2 (див. Фіг.1-2 та Фіг.4). Згадані приводи 6 кресленнями, де спускових механізмів 7 зброї 2, відеокамери 4 і на Фіг.1 подана блок-схема системи приводи 5 вертикального та горизонтального дистанційного керування охороною й обороною переміщення зброї 2, з'єднані із пристроєм 10 об'єктів, яка заявляється, керування системою 1 послідовно через блок 9 на Фіг.2 подана блок-схема розміщення на розподілу команд і керуючий приймальноплатформі та взаємозв'язок між собою передавальний пристрій 8 (див. Фіг.1-2). Система конструктивних елементів системи дистанційного дистанційного керування охороною й обороною керування охороною й обороною об'єктів, яка об'єктів (позиція 1 - див. Фіг.1) додатково містить заявляється, радіолокаційну станцію 14 виявлення цілі з на Фіг.3 подана блок-схема розміщення на механізмом 15 повороту на 360°, пристрій 16 стабілізованій платформі та взаємозв'язок між підсвічування цілі в оптичному діапазоні хвиль, собою конструктивних елементів системи пристрій 17 підсвічування цілі в інфрачервоному дистанційного керування охороною й обороною діапазоні хвиль, пристрій 18 автоматичного об'єктів, яка заявляється, розпізнавання цілі, пристрій 19 відеозапису та на Фіг.4 показаний варіант розміщення на додатковий блок 20 розподілу команд (див. Фіг.1платформі та взаємозв'язок між собою 3). Конструктивно та технологічно відеокамера 4, конструктивних елементів системи дистанційного одиниця стрілецької зброї 2, пристрій 16 керування охороною й обороною об'єктів, яка підсвічування цілі в оптичному діапазоні хвиль, заявляється, пристрій 17 підсвічування цілі в інфрачервоному на Фіг.5 показана схема змін кутів нахилу діапазоні хвиль, приводи 6 спускових механізмів 7 платформи із розміщеною на ній стрілецькою зброї 2, блок 9 розподілу команд і керуючий зброєю у поздовжньому напрямку, приймально-передавальний пристрій 8 розміщені на Фіг.6 показана схема змін кутів нахилу на платформі 21 (див. Фіг.1, Фіг.2, Фіг.4-7). Згадана платформи із розміщеною на ній стрілецькою платформа 21 закріплена на приводах 5 зброєю у поперечному напрямку, вертикального та горизонтального переміщення на Фіг.7 показаний мобільний варіант зброї 2 (див. Фіг.4 та Фіг.7). Приводи 5 конструктивного виконання платформи з вертикального та горизонтального переміщення розташуванням на ній конструктивних елементів зброї 2 закріплені на силовій основі 22, що системи дистанційного керування охороною й юстирується по горизонту. обороною об'єктів, яка заявляється, Радіолокаційна станція 14 виявлення цілі на Фіг.8 показаний варіант конструктивного встановлена на стабілізованій платформі 23 (див. виконання стабілізованої платформи з Фіг.1, Фіг.3 та Фіг.8). Зазначена стабілізована розташуванням на ній радіолокаційної станції платформа 23 радіолокаційної станції 14 виявлення цілі та її конструктивних елементів, виявлення цілі встановлена на силовій основі 24, на Фіг.9 показана схема бойового що юстирується по горизонту (див. Фіг.8). Згадані використання системи дистанційного керування силові основи 22 та 24 виконані або охороною й обороною об'єктів. стаціонарними, або в мобільному варіанті, Система дистанційного керування охороною й наприклад, на колесах (позиція «К») із обороною об'єктів (позиція 1 - див. Фіг.1) містить фіксаторами (позиція «Ф») до місця встановлення (як варіант конструктивного виконання) одну, дві (позиція «Г») (див. Фіг.7). Пристрій 16 або більше одиниці стрілецької зброї 2 з підсвічування цілі в оптичному діапазоні хвиль і дистанційним керуванням і боєкомплектом 3 (див. пристрій 17 підсвічування цілі в інфрачервоному Фіг.4-7), при цьому у якості зброї 2 можна діапазоні хвиль з'єднані із пристроєм 10 керування використовувати або кулемети, або автомати, або системою 1 послідовно через блок 9 розподілу пістолети-кулемети в залежності від глибини команд і керуючий приймально-передавальний території, що охороняється (див. Фіг.9). Система пристрій 8 (див. Фіг.1-2). Радіолокаційна станція 14 (позиція 1) дистанційного керування охороною й виявлення цілі та пристрій 18 автоматичного 9 30641 10 розпізнавання цілі з'єднані з пристроєм 10 підсвічування цілі в оптичному діапазоні хвиль, керування системою 1 каналами 25 зворотного пристрій 17 підсвічування цілі в інфрачервоному зв'язку (див. Фіг.1 та Фіг.3). Згадана радіолокаційна діапазоні хвиль, пристрій 18 автоматичного станція 14 виявлення цілі з'єднана із пристроєм 18 розпізнавання цілі, пристрій 19 відеозапису, автоматичного розпізнавання цілі, а кожна додатковий блок 20 розподілу команд, платформу відеокамера 4 з'єднана каналом зв'язку 12 із 21, основу 22 для розміщення зброї 2, основу 24 пристроєм 19 відеозапису через додатковий блок для розміщення радіолокаційної станції 14 з 20 розподілу команд (див. Фіг.1). Платформа 21 механізмом 15 повороту зазначеної конструктивно виконана з можливістю відхилення радіолокаційної станції 14, стабілізовану в площинах щодо приводів 5 вертикального та платформу 23 та елементи каналів зв'язку 12. При горизонтального переміщення зброї 2 й місця цьому у якості зброї 2 застосовують або кулемети, закріплення цих приводів (позиція 5) на силовій або автомати, або пістолети-кулемети [3] ,[4] в залежності від глибини території, що основі 22 (за кутами b у поздовжньому напрямку охороняється. (див. Фіг.5) та за кутами j у поперечному напрямку Платформу 21 конструктивно виконують з (див. Фіг.6) відносно осі стрілецької зброї 2 та можливістю відхилення в площинах щодо приводів горизонтальної площини Q). Канал 12 зв'язку 5 вертикального та горизонтального переміщення виконаний або провідним, або радіо. зброї 2 й місця закріплення цих приводів (позиція Радіолокаційна станція 14 виявлення цілі 5) на силовій основі 22 (за кутами b у конструктивно виконана з можливістю поздовжньому напрямку (див. Фіг.5) та за кутами j відображення дальності D виявлених цілей 26 та їх пеленгації із вказівкою номера цілі 26 при у поперечному напрямку (див. Фіг.6) відносно осі кількості цілей (позиція 26) дві чи більше (див. стрілецької зброї 2 та горизонтальної площини Q). Фіг.9). Зазначена радіолокаційна станція 14 Радіолокаційну станцію 14 виявлення цілі виявлення цілі виконана з можливістю конструктивно виконують з можливістю класифікації цілі 26 по характерному звуковому відображення дальності D виявлених цілей 26 та фарбуванню спектра сигналу. Радіолокаційна їх пеленгації із вказівкою номера цілі 26 при станція 14 виявлення цілі виконана з малою кількості цілей (позиція 26) дві чи більше. потужністю випромінювання 0,01-1,0Вт при Зазначену радіолокаційну станцію 14 виявлення безперервному випромінюванні в міліметровому цілі виконують з можливістю класифікації цілі 26 діапазоні й з кодовою модуляцією. Обертання по характерному звуковому фарбуванню спектра антенної системи 27 радіолокаційної станції 14 сигналу. Також радіолокаційну станцію 14 виявлення цілі та її горизонтування здійснюється виявлення цілі виконують з малою потужністю п'єзоелектричними, безредукторними, випромінювання 0,01-1,0Вт при безперервному реверсивними електродвигунами 28, що випромінюванні в міліметровому діапазоні й з самогальмуються (див. Фіг.8). Блок 9 розподілу кодовою модуляцією. Конструктивно команд конструктивно виконаний у вигляді радіолокаційну станцію 14 виявлення цілі мультиплексора. Пристрій 10 керування системою виконують так, щоб обертання антенної системи 1 виконано у вигляді комп'ютера. Пристрій 19 27 радіолокаційної станції 14 виявлення цілі та її відеозапису з'єднано з монітором 11 оператора горизонтування здійснювалось п'єзоелектричними, через пристрій 10 керування системою 1 (див. безредукторними, реверсивними Фіг.1-2). Радіолокаційна станція 14 виявлення цілі електродвигунами 28, що самогальмуються (див. з'єднана з пристроєм 10 керування системою 1 Фіг.8). Блок 9 розподілу команд конструктивно послідовно через блок 9 розподілу команд і виконують у вигляді мультиплексора, а пристрій 10 керуючий приймально-передавальний пристрій 8 керування системою 1 виконують у вигляді за допомогою каналу зворотного зв'язку 25 (див. комп'ютера. Канал 12 зв'язку виконують або Фіг.1 та Фіг.3). провідним, або радіо. Система дистанційного керування охороною й Згадані силові основи 22 та 24 виконують або обороною об'єктів (позиція 1 - див. Фіг.1) стаціонарними, або в мобільному варіанті, експлуатується наступним чином. наприклад, на колесах (позиція «К») із Попередньо (на підприємствах промисловості фіксаторами (позиція «Ф») до місця встановлення різного профілю) виготовляють конструктивні (позиція «Г») (див. Фіг.7). елементи системи: стрілецьку зброю 2 (включаючи Далі здійснюють заходи щодо збирання елементи її дистанційного керування), системи. боєкомплект 3 до зброї 2, відеокамери 4, приводи Приводи 5 вертикального та горизонтального 5 вертикального та горизонтального переміщення переміщення зброї 2 закріплюють на силовій зброї 2, приводи 6 спускових механізмів 7 зброї 2, основі 22, що юстирується по горизонту. керуючі приймально-передавальні пристрої 8, Платформу 21 закріплюють на приводах 5 блоки 9 розподілу команд, пристрій 10 керування вертикального та горизонтального переміщення системою 1, монітор 11 оператора, елементи зброї 2 (див. Фіг.4 та Фіг.7). Стабілізовану механічного зв'язку 13 приводи 6 з гашетками платформу 23 радіолокаційної станції 14 спускових механізмів 7 зброї 2, радіолокаційну виявлення цілі встановлюють на силовій основі 24, станцію 14 виявлення цілі (включаючи антенну що юстирується по горизонту (див. Фіг.8). систему 27 та п'єзоелектричні, безредукторні, Радіолокаційну станцію 14 виявлення цілі реверсивні електродвигуни 28, що встановлюють на стабілізованій платформі 23 самогальмуються), механізм 15 повороту (див. Фіг.1, Фіг.3 та Фіг.8). Конструктивно та радіолокаційної станції 14 на 360°, пристрій 16 технологічно відеокамеру 4, одиницю стрілецької 11 30641 12 зброї 2, пристрій 16 підсвічування цілі в оптичному сигнал з пристрою 10 по каналах зв'язку 12 діапазоні хвиль, пристрій 17 підсвічування цілі в послідовно через керуючий приймальноінфрачервоному діапазоні хвиль, приводи 6 передавальний пристрій 8 і блок 9 розподілу спускових механізмів 7 зброї 2, блок 9 розподілу команд надходить до відеокамер 4 та приводу 5 команд і керуючий приймально-передавальний вертикального і горизонтального переміщення пристрій 8 розміщують на платформі 21 (див. Фіг.1, зброї 2 (див. Фіг.1 та Фіг.4), а по каналу зворотного Фіг.2, Фіг.4-7). При цьому відеокамери 4 зв'язку 25 - послідовно через керуючий установлюють співвісно зі зброєю 2 (див. Фіг.4 та приймально-передавальний пристрій 8 і блок 9 Фіг.7). розподілу команд надходить до радіолокаційної Пристрій 16 підсвічування цілі в оптичному станції 14 виявлення цілі (безпосередньо на вхід діапазоні хвиль і пристрій 17 підсвічування цілі в механізму 15 повороту радіолокаційної станції 14, інфрачервоному діапазоні хвиль з'єднують із електродвигун 28 та антенну систему 27 (див. Фіг.1 пристроєм 10 керування системою 1 послідовно та Фіг.8). через блок 9 розподілу команд і керуючий За допомогою приводу 5 вертикального і приймально-передавальний пристрій 8 (див. Фіг.1горизонтального переміщення зброї 2 платформа 2). Радіолокаційну станцію 14 виявлення цілі та 21 (на якій закріплена відеокамера 4) почне пристрій 18 автоматичного розпізнавання цілі обертатися відносно точки встановлення приводу з'єднують с пристроєм 10 керування системою 1 5, здійснюючи поворот навколо поздовжньої осі каналами 25 зворотного зв'язку (див. Фіг.1 та силової основи 22 та нахил під кутами b у Фіг.3). Згадану радіолокаційну станцію 14 поздовжньому напрямку (див. Фіг.5) та за кутами j виявлення цілі з'єднують із пристроєм 18 у поперечному напрямку (див. Фіг.6) відносно осі автоматичного розпізнавання цілі, а кожну стрілецької зброї 2 та горизонтальної площини Q). відеокамеру 4 з'єднують каналом зв'язку 12 із При цьому за допомогою зазначеної відеокамери 4 пристроєм 19 відеозапису через додатковий блок здійснюється огляд місцевості, що охороняється 20 розподілу команд (див. Фіг.1). Радіолокаційну (див. Фіг.9). Водночас за допомогою механізму 15 станцію 14 виявлення цілі з'єднують з пристроєм повороту радіолокаційної станції 14 та 10 керування системою 1 послідовно через блок 9 електродвигуна 28 здійснюється обертання розподілу команд і керуючий приймальноантенної системи 27 навколо поздовжньої осі передавальний пристрій 8 за допомогою каналу силової основи 24 (див. Фіг.8-9). При цьому за зворотного зв'язку 25 (див. Фіг.1 та Фіг.3). допомогою зазначеної антенної системи 27 Конструктивно та технологічно приводи 5 здійснюється сканування радіопроменем вертикального та горизонтального переміщення радіолокаційної станції 14 місцевості, що зброї 2, приводи 6 спускових механізмів 7 зброї 2, охороняється (див. Фіг.9). керуючі приймально-передавальні пристрої 8 та При виявленні порушника/порушників монітор 11 оператора з'єднують каналами зв'язку (візуально за допомогою відеокамери 4 чи на за 12 із пристроєм 10 керування системою 1 (див. допомогою радіолокаційної станції 14) оператор 29 Фіг.1-2). Конструктивно та технологічно приводи 6 видає команду (що проходить через додатковий спускових механізмів 7 зброї 2 з'єднують блок 20 розподілу команд), згідно з якою механічним зв'язком 13 з гашетками спускових вмикається пристрій 19 відеозапису і «картинка» з механізмів 7 зброї 2 (див. Фіг.1-2 та Фіг.4). Згадані відеокамери 4 записується на зазначеному приводи 6 спускових механізмів 7 зброї 2, пристрої 19. Водночас командний сигнал з відеокамери 4 і приводи 5 вертикального та радіолокаційної станції 14 по каналу зв'язку 12 горизонтального переміщення зброї 2, з'єднують із подається на пристрій 18 автоматичного пристроєм 10 керування системою 1 послідовно розпізнавання цілі 26 (див. Фіг.1), де він через блок 9 розподілу команд і керуючий опрацьовується, а ціль 26 ідентифікується - чи є приймально-передавальний пристрій 8 (див. Фіг.1це людина, чи це тварина, чи об'єкт штучного 2). Пристрій 19 відеозапису з'єднують з монітором виробу (наприклад, транспортний засіб). З 11 оператора через пристрій 10 керування пристрою 18 автоматичного розпізнавання цілі 26 системою 1 (див. Фіг.1-2). відповідний сигнал по каналу зворотного зв'язку 25 По завершенню технологічних операцій щодо подається на пристрій 10 керування системою 1 і збирання системи, зазначена система далі по каналу зв'язку 12 на монітор 11 оператора дистанційного керування охороною й обороною 29 (див. Фіг.1). Водночас з пристрою 10 керування об'єктів є готовою для застосування. системою 1 спеціальний сигнал, що формується Система дистанційного керування охороною й при будь-якому виявленні цілі (не зважаючи на те, обороною об'єктів працює наступним чином. ідентифікована ціль 26, чи ще не ідентифікована), Попередньо оператор (позиція 29) обходить подається на приводи 5 вертикального і вогневі точки (які виконано або стаціонарними горизонтального переміщення зброї 2 і за див. Фіг.4 та Фіг.9, або мобільними - див. Фіг.7) і допомогою цих приводів 5 платформа 21 приводить зброю 2 (наприклад, кулемет - див. 4 та переміщується так, що зброя 2, яка закріплена на Фіг.7) у бойовий стан 9 шляхом досилання патрона платформі 21, наводиться на ціль 26, яка (з боєкомплекту 3, що розміщений на платформі виявлена радіопроменем радіолокаційної станції 21 поруч за зброєю 2) у патронник зазначеної 14 (див. Фіг.9), і автоматично утримує зазначену зброї 2. ціль 26 на прицілі зброї 2 при її переміщенні у часі Далі оператор (позиція 29 - див. Фіг.9) за та по місцевості (радіолокаційна станція 14 допомогою пристрою 10 керування системою 1 постійно надає сигнал щодо зміни координат цілі запускає систему 1 в роботу. При цьому керуючий 26). Радіолокаційна станція 14 виявлення цілі 13 30641 14 здійснює відображення дальності D виявлених постійно разом з пристроєм 16 підсвічування цілі в цілей 26, їх пеленгацію із вказівкою номера цілі 26 оптичному діапазоні хвиль та з пристроєм 17 при кількості цілей (позиція 26) дві чи більше, а підсвічування цілі в інфрачервоному діапазоні також зазначена радіолокаційна станція 14 хвиль (як прилад нічного бачення, з виводом виявлення цілі здійснює класифікацію цілі 26 по інформації на монітор 11 оператора 29). характерному звуковому фарбуванню спектра Підвищення ефективності застосування сигналу (при застосуванні порушником системи дистанційного керування охороною й радіоперешкод - для захисту від постановки обороною об'єктів, у порівнянні з прототипом, радіоперешкод радіолокаційну станцію 14 досягається за рахунок включення до зазначеної виявлення цілі виконують з малою потужністю системи радіолокаційної станції виявлення цілей і випромінювання 0,01-1,0Вт при безперервному пристроїв підсвічування цілей в оптичному й випромінюванні в міліметровому діапазоні й з інфрачервоному діапазоні хвиль, що дозволяє кодовою модуляцією). підвищити ефективність виявлення й знищення Оператор 29 (отримавши інформацію з цілі у будь-яких метеоумовах, при відсутності відеокамери 4 і радіолокаційної станції 14) оцінює оптичної видимості та у будь-який час доби й року. ситуацію, і у разі прийняття рішення, що це є Джерела інформації напад (порушниками 26) на об'єкт, що 1. Гаврилив И.Г., Можаровськая А.С. «Телевизионные охранные системы». Издат. ООО охороняється за допомогою системи 1, здійснює «ИНВЕСТ», Санкт-Петербург, 2000, стр.11-33 заходи щодо знищення цілі 26 (див. Фіг.9). аналог. Для цього він видає з пристрою 10 керування 2. Патент Российской Федерации системою 1 сигнал на привод 6 спускового №0002270973 С2 от 27.02.2006 «Система механізм 7 зброї 2 (через керуючий приймальнодистанционного управления охраной и обороной» передавальний пристрій 8 і блок 9 розподілу (заявка №2004115866 от 25.05.2004) - прототип. команд по каналу зв'язку 12 -див. Фіг.1). Привод 6 3. Александр Благовестов «То, из чего спускового механізм 7 зброї 2 за допомогою стреляют в СНГ», Справочник стрелкового механічного зв'язку 13 нажимає на спусковий оружия, под общей редакцией А.Е. Тараса, Минск, механізм 7 зброї 2 і здійснює стрільбу у бік цілі 26 издат. ХАРВЕСТ, 1999. (див. Фіг.9). При цьому боєкомплект 3 зброї 2 на 4. А.Б. Жук "Винтовки и автоматы", М., знищення цілі 26 витрачається або одиночними Военное издательство, 1987г. пострілами, або чергами. При виявленні цілі 26 радіолокаційною станцією 14 при відсутності оптичної видимості, наприклад, вночі (або у складних метеоумовах, наприклад, при тумані, сильному дощі, снігопаді), оператор 29 з пристрою 10 керування системою 1 видає сигнал (через керуючий приймальнопередавальний пристрій 8 і блок 9 розподілу команд по каналу зв'язку 12 -див. Фіг.1), відповідно, або на пристрій 16 підсвічування цілі в оптичному діапазоні хвиль (вночі або у темний час доби), або на пристрій 17 підсвічування цілі в інфрачервоному діапазоні хвиль (у складних метеоумовах - при тумані, сильному дощі, снігопаді, як прилад нічного бачення), або на обидва пристрої одночасно. При цьому оператор 29 зорове дублює ідентифікацію цілі 26, що була здійснена за допомогою пристрою 18 автоматичного розпізнавання цілі 26, для прийняття відповідного (щодо ситуації) рішення на застосування зброї 2. Подальші операції щодо знищення цілі 26 здійснюються аналогічно тому, як описано вище при прийнятті оператором 29 рішення, що це є напад (порушниками 26) на об'єкт, що охороняється за допомогою системи 1. Після знищення цілі 26 (або цілей) оператор 29 надає з пристрою 10 керування системою 1 сигнал (через керуючий приймальнопередавальний пристрій 8 і блок 9 розподілу команд по каналу зв'язку 12 - див. Фіг.1) щодо вимикання вищезазначених пристроїв 16 та 17. При цьому відеокамера 4 (при відсутності видимості) також вимикається. Як варіант бойового застосування системи 1 здійснюється інший варіант - відеокамера 4 у темний час доби не вимикається, а працює 15 30641 16 17 30641 18
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for remote control of protection and defense of objects
Автори англійськоюVasylenko Oleksandr Vasyliovych, Naumov Oleksandr Mykolaiovych, Kruchinin Serhii Volodymyrovych, Melnyk Oleksandr Dmytrovych, Lapytskyi Serhii Volodymyrovych, Andriichenko Oleh Stanislavovych, Andriichenko Oleh Stanislavovyvch, Sendetskyi Mykola Mykolaovych, Turchyn Valentyn Mykolaiovych, Komarov Volodymyr Oleksandrovych, Lotokha Liudmyla Mykhailivna, Zhovanik Borys Yevheniiovych, Mashtalir Vadym Vitaliiovych, Ivanov Borys Pavlovych
Назва патенту російськоюСистема дистанционного управления охраной и обороной объектов
Автори російськоюВасиленко Александр Васильевич, Наумов Александр Николаевич, Кручинин Сергей Владимирович, Мельник Александр Дмитриевич, Лапицкий Сергей Владимирович, Андрейченко Олег Станиславович, Андрийченко Олег Станиславович, Сендецкий Николай Николаевич, Турчин Валентин Николаевич, Комаров Владимир Александрович, Лотоха Людмила Михайловна, Жованик Борис Евгеньевич, Машталир Вадим Витальевич, Иванов Борис Павлович
МПК / Мітки
МПК: F41H 11/00
Мітки: дистанційного, об'єктів, система, керування, обороною, охороною
Код посилання
<a href="https://ua.patents.su/9-30641-sistema-distancijjnogo-keruvannya-okhoronoyu-jj-oboronoyu-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Система дистанційного керування охороною й обороною об`єктів</a>
Система дистанційного керування з безпечної відстані для очисних машин і комплексів
Номер патенту: 70559
Опубліковано: 15.10.2004
Автори: Курносов Вячеслав Григорович, Сіроткін Олександр Арнольдович, Пуріс Олександр Іванович, Красік Яків Львович, Курносов Григорій В'ячеславович, Сидяк Володимир Олександрович, Сірченко Володимир Миколайович, Сіненко Віктор Васильович
МПК: E21C 35/24
Мітки: система, безпечної, керування, машин, відстані, комплексів, очисних, дистанційного
Формула / Реферат:
Системадистанційного керування з безпечної відстані для очисних машин і комплексів, що складається з датчиків місцезнаходження комбайна, блока комбайнового, пульта переносного, модулів енергоживлення, коробок клемних, постів керування секцією, блоків магістральних, поста керування конвеєром, блока контролю двигунів, блока штрекового, підключеного першим входом до загальношахтної інформаційної системи і з'єднаного другим входом з виходами...
Система дистанційного керування персональним комп`ютером з використанням бездротового телефонного апарата
Номер патенту: 14440
Опубліковано: 15.05.2006
Автор: Крамченко Віталій Олександрович
МПК: G06F 13/00, G06F 3/01
Мітки: комп'ютером, керування, персональним, система, використанням, апарата, бездротового, дистанційного, телефонного
Формула / Реферат:
Система дистанційного керування персональним комп'ютером, що включає персональний комп'ютер (ПК), оснащений звуковою картою і звуковими колонками, та бездротовий телефоннийапарат, який складається з бази та трубки, що зв'язані між собою за допомогою радіозв'язку, причому база з'єднана з мікрофонним входом звукової карти ПК таким чином, що один контакт виходу бази з'єднаний з контактом GND мікрофонного входу звукової карти, другий контакт...
Система мовлення й приймання, а також приймач-декодер і пристрій дистанційного керування для неї
Номер патенту: 66789
Опубліковано: 15.06.2004
Автори: Деклерк Крістоф, Баст'єн Жан-Поль, Байасі Мулхам
МПК: H04N 7/16, H04N 7/173
Мітки: приймач-декодер, неї, дистанційного, пристрій, приймання, мовлення, система, керування, також
Формула / Реферат:
1. Приймальний пристрій, що містить приймач-декодер для використання при прийманні телевізійної або радіопрограми або файла даних і який включає в себе засіб для взаємодії з кредитною або банківською карткою користувача для зчитування кредитної або банківської інформації, що знаходиться на картці, а також, окремо від згаданого засобу, додатковий засіб взаємодії з певною карткою користувача, для зчитування інформації, що знаходиться на цій...
Пристрій для дистанційного релейно-контактного керування по тролеях
Номер патенту: 81909
Опубліковано: 25.02.2008
Автор: Долгов Юрій Леонідович
МПК: B60L 15/00, B60L 15/20, B61L 25/00
Мітки: пристрій, тролеях, дистанційного, керування, релейно-контактного
Формула / Реферат:
Пристрій для дистанційного релейно-контактного керування по тролеях, наприклад електровозами з приводом змінного струму і живленням по чотирипровідній контактній лінії, що складається з двох паралельних ланцюгів, підключених однією спільною точкою до тролейного провідника, і двох паралельних ланцюгів, підключених однією спільною точкою до тролейного струмознімача, інші спільні точки обох паралельних ланцюгів включені в ланцюг змінного...
Пристрій дистанційного керування
Номер патенту: 1811
Опубліковано: 15.05.2003
Автори: Стаднік Микола Іванович, Мезніков Артур Володимирович
МПК: G08C 19/16
Мітки: пристрій, дистанційного, керування
Формула / Реферат:
Пристрій дистанційного керування, що містить блок дистанційного керування, переносний пульт керування і джерела живлення, який відрізняється тим, що він оснащений другим переносним пультом керування, з'єднаним однією кабельною перемичкою з блоком дистанційного керування.
Попередній патент: Спосіб балансування ротора машини по нестабільній амплітуді вібраціії
Наступний патент: Магнітний сепаратор
Випадковий патент: Бункер для сипучих матеріалів