Спосіб вимірювання і контролю місцезнаходження суден
Текст
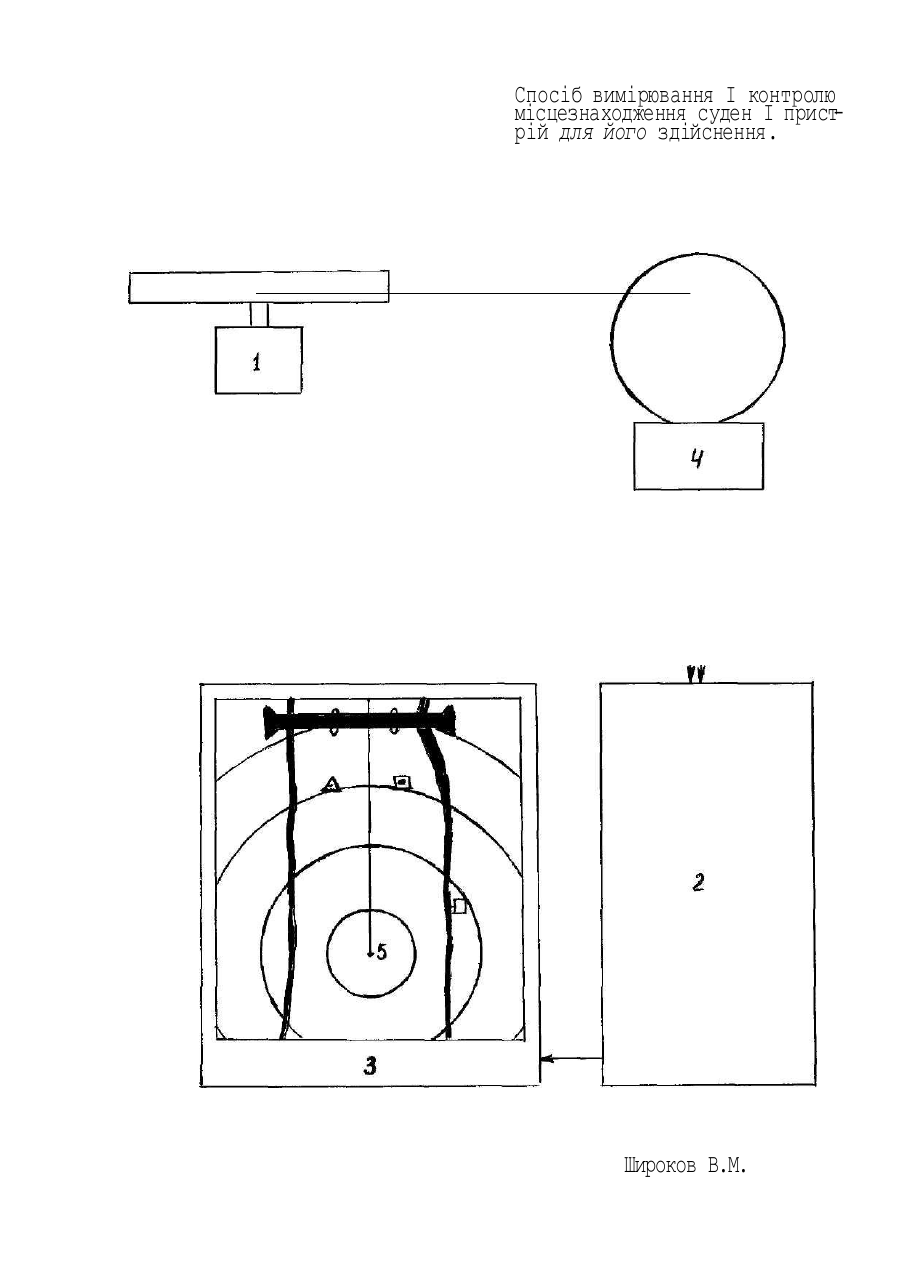
опи с МІЖ 6 Q05D1/OI; / І Спосіб вимірювання і контролю місцезнаходження суден І пристрій для його здійснення. Застосовується у судовождінні на водному транспорті у праці в сти снутих умовах/в вузкістях,ріках,уздовж берегів І т.І ./, в обмежанної видимості,при відсутності навігаційної обстановки,при наявності на екрані радіолокаційної станції /далі скороченно РЛС/ великих фальшивих ехо-спгналів. Аналогом способу вимірювання І контролю містознаходжєння суден є спосіб вимірювання І контролю місцезнаходження суден який виконувався за допомогою картосчислювальної приставки - блок сполучення "Пальма" до РЛС "Нептун",яка була описана в : Олыпамовский С-Б. "Судовождение у правила плавания по внутрєним судоходным путам ".Москва.Транспорт.1976j. Сторінка 296.Каманин В.И."Использование радиолокации для кораблевождения ". Москва."Военяздат.1960р.Сторінка 128.Спосіб вимірювання І контролю місцезнаходження суден вирішувався шляхом сполучення радіолокаційного зображення,отриманого РЛС,з навігаційною картою по радіолокаційним орі єнтирам. Утворене сполучене зображення давало змогу судоводію визначити місцезнаходження судна на навігаційнії ! карті,а по рухомим І не рухомим кругам далини контролювати І виміряти його.Хоча сяосіб мав відносно велику точність визначення місцезнаходження суден,але не одержав широ кого росповсюддення тому,що був заснований на оптіко-мєханичному прис трої, який вймогав ручного сполучення масштабу І переміщення навігаційної карти за радіолокаційним зображенням.Це вимагало великих витрат часу на проведення вимірів,складності експлуатації,малоії надійності . Прототипом способу є сгюсфб вимірювання І контролю місцезнаходження "супєнТякйІГвиконувався за допомогою удосконаленої картосчислювальної приставки,описаної у розробці Одеського Зисшего инженерного Морського Вчилища /рос.(ЖМУ/ Щ{ № 656.6I.052.52/b3 № ГосрегистрацІІ 0184004712b "Отчет о научно-исследовательской работе,исследование судоходных трасс способов проводки судов под мостами реки дунаЛ в условиях ограниченной видимости" /промежуточный/.Тема № 671.Начальник научно-исследовательского сектора В.Д.Савчук.Начальник кафедры,руководитель работы к.ф-м.н . профессор Г.Г.Ермолаев.Одесса . 1984р.Утверждена зам.начальника училища по научной работе В.А.Грехов II. 1С. 1984р.Сторінка 73.Сг:осІс вимірювання І контролю місцезнаходження суден вирішувався шляхом сполучення ра діолокаційного зображення, отриманого ЛГСз пере снятии на фотоплівку зображенням навігаційної карти для зручності сполучення мающей радіоло Стор.2 каційнє навантаження /радіолокаційну коректуру/.Утворене сполучене зображення також давало змогу судоводію визначити місцезнаходження судна на навігаційній карті,а по рухомим І не рухомим кругам далини контролювати І виміряти його.Цей спосіб теж мав відносно велику ність визначення місцезнаходження суден І був більш зручнішим спосі-бом сполучення.Але не одержав широкого росповсходження тому,що був теж заснований на оптіко-механичному пристрої,який вимогав ручного сполу чення масштабу І переміщення фотоплівки з зображенням навігаційної карти за радіолокаційним зображенням.Це вимогало великих витрат часу на проведення вимірів,складності експлуатації,малоII надійності,крім того,ще вимогало великої КІЛЬКОСТІ робіт по ПІДГОТОВЦІ $ ОТОЛЛІВКІ ,НЄ ураховувався II швидкий знос,не отпрацьовани були методи коректури на вігаційної Інформації. Аналогом пристрою для здійснення спосібу вимірювання І контролю містознаходаєння є пристрій заснований на РІС І картосчислговальній приставці - блок сполучення "Пальма" до РЛС "Нептун",яка була описана в : Сльшамовокий С.Б."Судовождение и правила плавания по внутреним су доходным путям"ЛЛосква.Транспорт.1976р.Сторінка 296.Каманин В.И."Использование радиолокации для кораблевождения ".Москва.Воениздат.1960р.Сторінка 128.Пристрій мав у своєму складі РІС на екран якої виводилось радіолокаційне зображення місцевості.К цьому екрану під кутом 45°розташовувалось полупрозоре дзеркало.Знизу під дзеркалом знаходилась на вігаційна карта.Спостерігач бачив в полупрозорому дзеркалі два зобра ження радіолокаційне з екрану РІС,яке давало фактичне місцезнаходження судна відносно радіолокаційних орієнтирів І зображення навігаційної карти.Ручним переміщенням цієї карти у вертикальному І горизонтальному напрямках регулювався масштаб І виконувалось сполучення зображень по радіолокакаційніш орієнтирам.Утворене сполучене зображення давало змогу судоводію визначити місцезнаходження судна на навігаційній карті,а по рухомим І не рухомим кругам далини контролювати І виміряти його.Сполу чення тут здійснювалось ручним методом , тому це в судових умовах при наявності качки,вібрації І Інших зовнішних факторах вітворювало труднощі І незручності,забирало багато часу на проведення цієї операції , занижувало точність вимірів,надійність Лірототипоїл пристрою для здійснення способу вимірювання І контролю місцезнаходження є пристрій засно ваний на РЛС І на удосканаленої картосчислювальній приставці,яка описана у розробці Одеського Висшого Инженерного Морського Вчилща/рос.ОВІМУ / УДК :г' 6b6.6I.05C.52/53 Ш Госрегистрации 0І840047І25 "Отчет о научно-исследовательской работе,исследование судоходных трасс и способов проводки судов под мостами реки Дунай в условиях ограниченной видимости "/про Стор.З межуточный/.Тема $ 671.Начальник научно-исследовательского сектора В.Д.Савчук.Пачальник кафедры,руководитель работы к.ф-м.н.профессор Г.Г.Ермолаев.Одесса . 1984р.Утверждена зам.начальника училища по научной работе В.А.Грехов П.12.1984р.Сторінка 75.Пристрій мав у своему РЛС на екран якої виводилось радіолокаційне зображення місце вості.К цьому екрану під кутом 45°розташовувалось полупрозоре дзеркало . Знизу під дзеркалом знаходився фотозбільшувач , ^ для фотошіївкі. * Спостерігач бачив в полупрозорому дзеркалі два зображення радіолока ційне з екрану РЛС,яке давало «Тактичне містознаходжєння судна відносно радіолокаційних орієнтирів І зображення навігаційної карти пересня-тої на фотоплівку.Зображення навігаційної карти для зручності сполучення по радіолокаційним орієнтирам ще мало радіолокаційне навантаження /радіолокаційну коректуру/.Сполучення на цьому приладі виконувалось збільшенням чи зменшенням масштабу завдяки фотозбільшувачу - а прокручування фотоплівки забесяєч |!вало прямолінійне переміщення зображення навігаційної карти.На цьому сполученному зображенні також можна було визначити місцезнаходження судна на навігаційній карті,контролювати його,І по рухомим І не рухомим кругам далини вимірити його . А ще цей. прилад забеспєчував зростання швидкості І простоти сполучення .Але вІн також залишався достатно складним ручним засобом сполучення,вимогав великої к!яькост т робіт по ПІДГОТОВЦІ оотоплівкі.не ураховувався II швидкий знос,не йули відпрацьовані методи коректури навігаційної Інфор мації,він також залишався схильним впливу зовнішних факторів,наприклад , вібрації І т.І.Таким чином в усіх ціх випадках спосіб вимірювання І ко нтролю місцезнаходження суден шляхом сполучення радіолокаційного зоб раження з навігаційним зображенням по радіолокаціішим орієнтирам здій снювався за допомогою оптйко-механичнин пристроїв з ручним сполученням зображень.Тому, прі! відносно ВЄЛІКІЙ точності визначення місцезнаходження І не великій цені вони не одержали широкого росповсюдаення від скла дності експлуатації,великих витрат часу на проведення вимірів,малої на дійності.І тому,як І досі,на практиці широко роспозсюдаена радіолока ційна візуальна проводка.Для усунєня недоліків радіолокаційної візуаль ної проводки І способу вимірювання І контролю місцезнаходження суден заснованого на оптійко-механічних пристроях,а також для підвищення на дійності вимірів цЗм спосібом спрямован^пооіб вимірювання І контролю місцезнаходження суден І пристрій для його здійснення розглянутий у формулі винаходу. В основу винаходу поставлено задачу спосіб вимірювання І контролю місцезнаходження суден методом сполучення радіолокаційного зображення І зображення навігаційної карти по радіолокаційним орієнтирам на під Стор.4 ставі оптйко-тлеханізчного прй строю .шляхом зміни цього пристрою на комп'ютер у пам'ять якого закладено зображення навігаційної карти,а спо лучення зображень викоріуеться на дисплеї комп'ютера по радіолокаційним орієнтирам І по кралкі місцезнаходження,визначеної по супутникової системі І нанесенної на зображення навігаційної карти,забеспечити збі льшення швидкості,точності,надійності,простоти вимірювань місцезнаход ження, забеспєчитй можливість коректури навігаціїіної Інформації,автома тичне сполучення зображень,що надасть можливості оріентировки в умовах обмеженої видимості,при відсутності навігаційної обстановки І при на явності великих фальшивих ехо-сигналів на екрані радіолокаційної стан ції. 7 наш час при плаванні судів для визначення місцезнаходження поши рено застосовуються супутникові системи.Вони в змозі забезпечити точ ність визначення міста,навіть,до 1-5 метрів І в поєднанні з електрон ними картами/зображенням навігаційної карти на дисплеї комп'ютера,в пам'ять якого занесено зображення навігаційної карти / забеспечують простоту, наочність визначення крапки місцезнаходження судна.З такого вели кою точністю супутникові системи змогли би використовуватись при пла ванні по внутрішнім водним шляхам,в вузкістях І уздовж берегів,особливо в умовах обмежанної видимості.Але вони мають один велики ! недолік— це дискретність вимірювань,тобто»вимірювання місцезнаходження судна можливо провести один раз за період часу від 16 хвилин до 4 годин.Це залежить від КІЛЬКОСТІ ОКОЛОЗЄШЙХ супутників,збільшувати КІЛЬКІСТЬ яких дуже дорого.І тому судоводіям рекомендується при ПІДХОДІ до берегів застосовувати І Інші засоби визначення місцезнаходження.Разом з тим,при плаванні судів в стиснутих умовах І особливо в обмежанной видимості велике поширення має радіолокаційна візуальна проводка.Вона заснована на неперервному візуальному контролі на екрані радіолокаційної станції за місцезнаходженням судна відносно радіолокаційних оріе нтирІв.Споотерйимйце місцезнаходження судоводіи візуально зрівнює фак тичне знаходження з рекомендованим на навігаційній карті.Метод здобув поширення з простоти І наочності.Але Він має низьку точність від зас тосування візуального контролю І цілком залежить від професійних І осо бистих якостей судоводія.і це при тому,що плавуча обстановка на наві гаційній карті,деколи,наноситься з точности 100-200 метрів,а на екрані РЛС пологі береги І мілини не відображаються,берегові навігаційні знаки не беруться,а плавучі навігаційні знаки не завжди вдається швидко знайти І опізнати /орієнтири навігаційних карт часто не бувають та-кіши на екрані РІС/.А відсутність плавучої навігаційної обстановки,в деяких випадках,лишає повністю мсшшзооті орієнтуватись.Дуже важко орі єнтуватись при наявності на екрані РЛС великого фальшивого єхо-сигналу , Стор,5 наприклад, від своїх штовхаемих составів на ріках , так як ці єхо-сигна-ли затіняють береги,мости,гидротехнічні споруди І навігаційну обста новку.Навіть, використання спеціальних радіолокаційних карт не виключає візуального контролю фактичного місцезнаходження за рекомендованим . Для усунена недоліків радіолокаційної візуальної проводки спрямо ван,розглянутий у заявці на винахід,спосіб вимірювання Іконтролю міс цезнаходження суден засновали :! на сполучені радіолокаційного зображення з зображенням навігаційної карти по радіолокаційним орієнтирам за допомогою комп'ютера у пам'ять якого занесено зображення навігаційної карти.Для підвищення надійності вимірів до цього способу додається сполучення крапки місцезнаходження судна,визначеної по супутникової сис темі місцезнаходження суден,з початком развертки РЛС.Розглядається пристрий для його здІйсненя,який включає РІС,комп'ютер І супутникову ^систему місцезнаходження суден.Суть його в тому,що на екран дисплею комп'ютера виводяться зображення Індікатору приймальника РЛС разом з службовими ЛІНІЯМИ.Це зображення дає фактичне положення судна відносно радіолокалішіих орієнтирів.Під це зображення виводиться на екран дисп лею /бажано у контрасних кольорах/ зображення навігаційної карти з пам'яті комп'ютера.Попередньо закладену на дискету/дискети / сканеру:-©цим пристроєм.Регулюється його масштаб І здійснюється сполучення по радіолокаційним орієнтирам.Крім того,здійснюється сполучення крапки місцезнаходження,зазначеної оупутниковою системою І нанесеною на зоб раження навігаційної карти з початком развертки радіолокаційного зоб раження.Спочатку сполучення зображень можливо здійснювати ручним регу люванням.а подальше автоматичне може виконувати комп'ютер.При цьому , навігаційна карта у пам'яті комп'ютера може коректуватись,також,І по данним радіолокаційного зображення.Після сполучення на екрані дисплею буде два контрастних зображення - одне радіолокаційне фактичне,а друге рекомендоване на навігаційній карті,початок развертки на радіолокацій ному зображенні вкаже на місцезнаходження судна /перевірене по супутникової системі/ відносно лінії судового руху,сторону зміщення,а по міткам рухомого І нерухомого кругів дальності судової РЛС могкливо оці нити КІЛЬКІСТЬ зміщення,вивірити II.Значно збільшується точність вимірів відносно радіолокаційної візуальної проводки,упрошується контроль за навігаційною обстановкою,збільшується швидкість приняття рішень на керування судном судозодІем.КрІм того,крапка місцезнаходження визначе ная по супутникової систеглі.якйи ,"Прив'язується" до радіолокаційних орієнтирів І тим зменшується залежність супутникової системи від дис кретності. Таким чином,виконується періодичний контроль місцезнаходження судна по супутнику І прив'язка цього міста до радіолокаційних оріє нтирів, а це зменшує недоліки обох систем,підвищує їх вирішальну спро Стор.6. можність І кадііїність вимірівЛІа такому еполученноыу зображенні нап, рпклад.фактична Відсутність плавучої кавітаційної обстановки змінюється II "теоретичним розташуванням " І тому тут дуже просто орієнтуватись . При нечіткому відображенні цієї обстановки на екрані РЛС тут дуже просто опізнати ІІ.А великі фальшиві ехо-сигналк попередньо затінявшие береги»мости.гидротехнічні споруди І навігаційні знаки на такому спо лученному зображенні будуть "заповнені теоретичиш зображенням".А це дуже спрощує орІентировку.В перспективі можливо виробляти записи ціх сполученншс зображень , наприклад .для ВІДЧОЇНОСЇ І,разбору аварій.корек тури І ззаЬшого обміну Інфоршціаю меж судами » Це додасть нові можли вості до підвищення безпеки І ефективності праці водного транспорту » На Фіг. "Спосіб вимірювання І контролю місцезнаходження GJMQH I пристрій для його здійснення " показано схематичне зображення пристрою дая здійснення способу вимірювання І контролю місцезнаходження суден , Д£ і І.Судова радіолокацііша станція /скорочено РЯС /.2.Комп'ютер. ^♦Дисплей коші'ютера .4.Супутникова система місцезнаходження суден . ^Крапка від сполучення крапки місцезнаходження » визначеної по супутни кової системи /4/ І початка развертки РЛС /на дисплеї це місце знаход ження судна/.На дисплеї комп'ютера зображено для наочності червоним кольором - радіолокаційне зображення одержане судовой РЛС /і/, /тут ба, чити MOOT .береги І плавучу обстановку/Лорним кольором зображена служ бові лінії,одержані разом о радіолокаційним зображенням з судової РЛС /І/»/тут бачити не рухомі круги далини .курсова ЛІНІЯ /. С ИНІМ кольором зображена навігаційна карта,одержана з пам'яті комп'ютера /2/,/тут бачити мост з биками , береги,ішшучу навігаційну обстановку , береговий знак/.Радіолокаційне зображення місцевості з судової РЛС /І/ разом з службовими ЛІНІ ЯШ надходе до комп'ютер а /2/ І виво диться на ди сплей /З/.Іут на дисплеї за допомогою комп'ютера виконується сполучення цього радіолокаційного зображення з зображенням навігаційної карти цього участку по радіолокаційним орієнтирам.Зображення навігаційної карти надходе з яам'яті комп'ютера.Крім того , з сулутникової системи місцез находження суден /4/ надходе до комп'ютера /2/ отриманая крапка місце знаходження , вона наноситься на навігаційну карту І виконується II сполучення з початком развертки судової РЛС /і/. Пристрій у статичному стані включав ; радіолокаційну станцію /І/, комп'ютер /2/ з дисплеєм /зДсупутникову систему місцезнаходження суден /4/.РЛС З'єднана з компьютером /2/ таким чином.щоб забеспечити на ходження , отриманого нею радіолокаційного зображення місцевості разом з службовими ЛІНІЯМИ до компьютера /2/ І далі на дасдлеіі /з/.З компьютером /2/ з'єднана також супутникова система визначення місцезнаходжень Стер.7* ня суден /4/.Вона з'єднана тах ш чияом,щоб Іяфортція з неї надходи ла до коші'ютера І наносилась крапка місцезнаходження судна на зображення навігаційної карти з пам'яті комп'ютера,виведеної на дисплей/З /. При ньому, окремо працююча РЛС /і/ може забеспечити тільки візуальну радіолокаційну проводку.А окремо працююча сулутникова система місце знаходження суден /4/ разом з комп'ютером /2/ на його дисплеї /3/ забеспечуе визначення місцезнаходження суден по супутнику на електронній карті /зображенні навігаційної карти занесеної у яам'ять комп'ютера І виведеної на дисплей/. Таким чином, з •єднані у потрібному вигляді не працюючі чи працюючі і функціонуючі окремо ці прилади будуть утворювати пристрій для здійснення способу у статичному стані . Црадаючим цей пристрій буде тоди,коли комп'ютер /2/ на дяошаї/З/ по спеціальній програмі буде вести обробку Інформації , отриманої з РЛС /і/,власної пам'яті /в якій записано зображення навігаційної карти / І супутникової системи місцезнаходження суден /4/.Ця програма повинна забеспечатя сполучена на дисплеї /3/ зображень радіолокаційного І на вігаційного по радіолокаційним орієнтирам , а також крапки місцезнаход ження, нанесеної на зображення навігаційної карти»з початком развертки радіолокаційної станції.Тому дія пристрою буде складатись з того,що з W0 буде на дходит и Інфор мація д о комп 'ютера /2/ І ВИВОДИ ТИСЬ на дис плей /З/ Ф Г ЇІСЛЯ спеціальної обробки комп'ютером буде ВИВОДИТ ИСЬ на дис плей Інформація з пам'яті комп'ютера /2/.Ше до комп'ютера буде надходити Інформація s судутникової систеш місцезнаходження суден /4/.Спеціальна програма буде вести обробку всієї цієї Інформації І забеспече Биконаїшя способу вимірювання І контролю місцезнаходження суден , з відображенням Інформації на дисплеї комп'ютера. Упровадження цього способу у водному транспорті не буде дуже складним І дорогим.На багатьох морських судах вже стоять супутникові сис теми визначення місцезнаходження-Треба буде тільки вирішиги,яка точ ність визначення місцезнаходження по супутнику потрібна тому чи Іншому судну.Наприклад,для судів внутрішнього плавання б^д& погрібна більш точна супутникова система місцезнаходження з дволчастотшш приймальни ком надающая точність 1-5 метрів,а для супертанкерів можливо буде дос татньо систеш з одночастотним приймальником з точністю 100 метрів. Крім того,на всіх судах вже стоять PICA при подальшому розвилку вхвхтроники,зменшенням II себевартості І поширеним упровадженням на водному транспорті поява комп'ютера на судах нєшнуча.Тому для здійснення способу треба буде тільки з'єднати ці црилади у потрібному вигадці І розробити програму до компьютера . Точність визначення місцезнаходження суден цім едосібом залежить Стор.8. від : - точності визначення місцезнаходження по супутникової системі ; - наявності крапкових орієнтирів на радіолокаційному зображенні ; - масштабу І достовірності використозаної навігаційної карти ; - особлавостів берегової черта ; - точності сполученая радіолокаційного зображення з зображенням наві гаційної карти ; З урахуванням цього, об-ца яогрешність визначення місця судна,виражена у мм« шкали Індікатору дриймальнака РІС : - \пц - ті-*- ті* ті - т,% 4s де trrif- яогрешність визначення місцезнаходження ло сулутнаку І нане сення крапки на зображення навігаційної карти ~tnk~ догрєдшість нанесення крашш на карту /№« -nit* погрешність сполучення радіолокаційного зображення І зображення навігаційної карти на дисплеї комп'ютера //^ -ftU- логрешість встановлення масштабів обох s -ntq- логредшість ВІДМІТКИ дентру развертки судової Лри масштабі радіолокаційного зображення І навігаційної картв 1:3760 /діаметр екрану РЯС гб,В см*.шкала дальності 500 метрів/ обща погрешність склада 4,5 метрІв.Бри масштабі радіолокаційного зображення І навігаційної карти 1:90*3 /діаметр екрану РЛС 26,6 си.,шкала дальності 1200 метрів/ обіца логрешість склада 11,7 метрів.іііо свідчить о досить великій точності визначення місця судна в стиснутих умовах.Най-більш ТОЧНИХ результатів визначення місця суден слід очікувати на ділянках які маоть обривіоту І Ізрізану берегову черту чи штучні берегові споруда /доїла,труби,лінії електропередач,мости,бетоніровані стіни , насншз І т#І#/. П І Д Я И С: _/ Сроков В.М. Спосіб вимірювання І контролю місцезнаходження суден І прист рій для його здійснення. Широков В.М.
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05D 1/02
Мітки: вимірювання, місцезнаходження, контролю, суден, спосіб
Код посилання
<a href="https://ua.patents.su/9-33364-sposib-vimiryuvannya-i-kontrolyu-misceznakhodzhennya-suden.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання і контролю місцезнаходження суден</a>
Спосіб вимірювання і контролю місцезнаходження суден
Номер патенту: 33174
Опубліковано: 15.02.2001
Автор: Широков Володимир Михайлович
МПК: G05D 1/02
Мітки: вимірювання, контролю, спосіб, суден, місцезнаходження
Текст:
...якого закладено зображення навігаційної карти,а сполучення зооражень по радіолокаційним орієнтирам виконується за допомогою комп'ютера на екрані дисплею,заоеспечити зоїльшення швидкості,точності , надійності, простоти вимірювань місцезнаходження заоеспечити можливість , коректури навігаційної інформації,автоматичне сполучення зооражень,що надасть можливості оріентировки в умовах оОмежаноі видимості , прй відсутності навігаційної оостановки і...
Спосіб дискретного контролю місцезнаходження в лаві виконавчого органу стругу та пристрій для його здійснення
Номер патенту: 7689
Опубліковано: 26.12.1995
Автори: Кібрик Ісаак Соломонович, Торубалко Тарас Григорович, Барданов Валерій Олександрович
МПК: E21C 35/24
Мітки: пристрій, спосіб, дискретного, лави, здійснення, органу, виконавчого, стругу, місцезнаходження, контролю
Формула / Реферат:
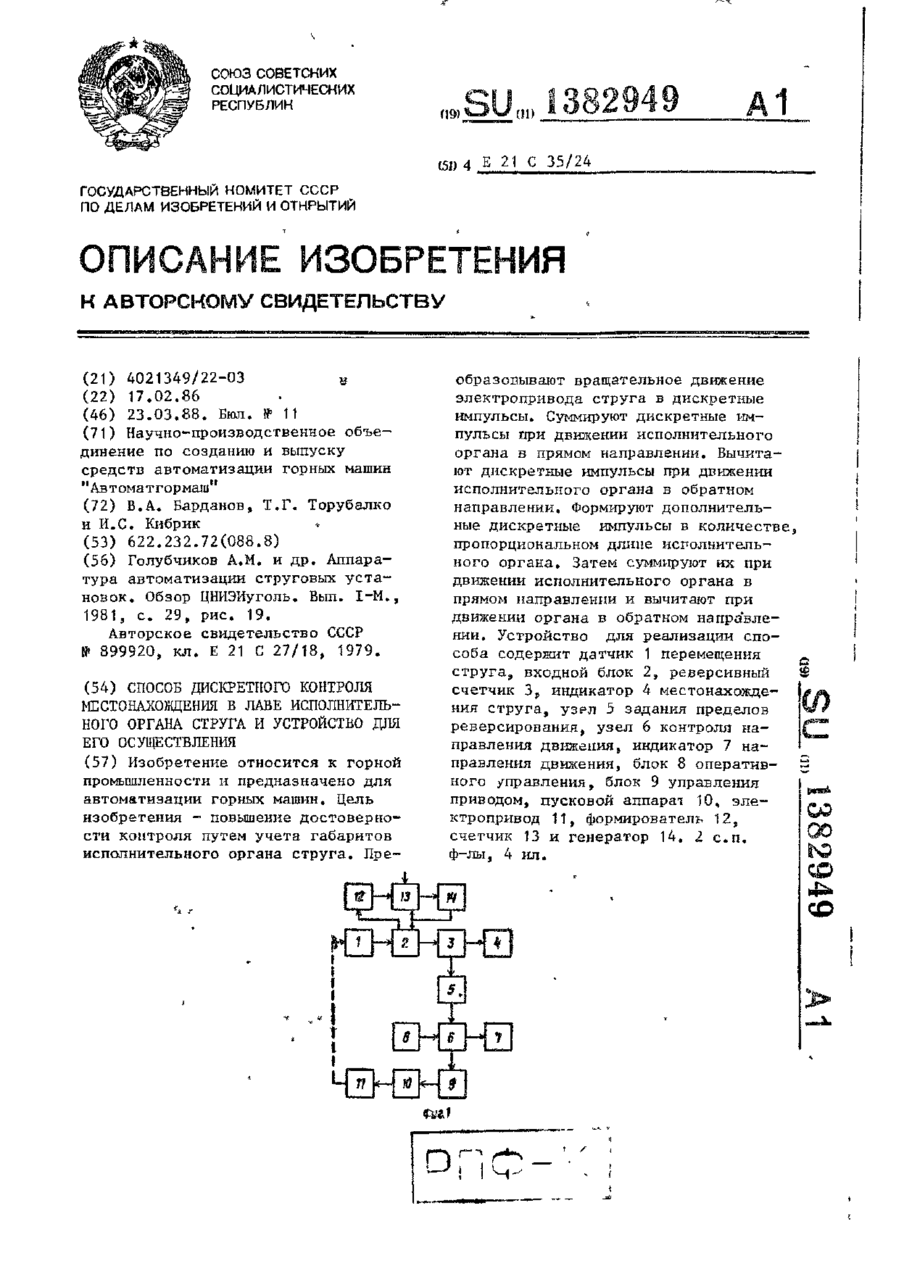
1. Способ дискретного контроля местонахождения в лаве исполнительного органа струга, заключающийся в преобразовании вращательного движения электропривода струга в дискретные импульсы, суммировании дискретных импульсов при движении исполнительного органа в прямом направлении и вычитании дискретных импульсов при движении исполнительного органа в обратном направлении, отличающийся тем, что, с целью повышения достоверности контроля путем...
Пристрій контролю місцезнаходження рухомих об`єктів
Номер патенту: 16059
Опубліковано: 29.08.1997
Автори: Коваленко Микола Петрович, Тараненко Валерій Олександрович, Довженко Володимир Профирович, Тимошенко Леонід Іванович
МПК: B61L 1/00
Мітки: пристрій, рухомих, контролю, об'єктів, місцезнаходження
Формула / Реферат:
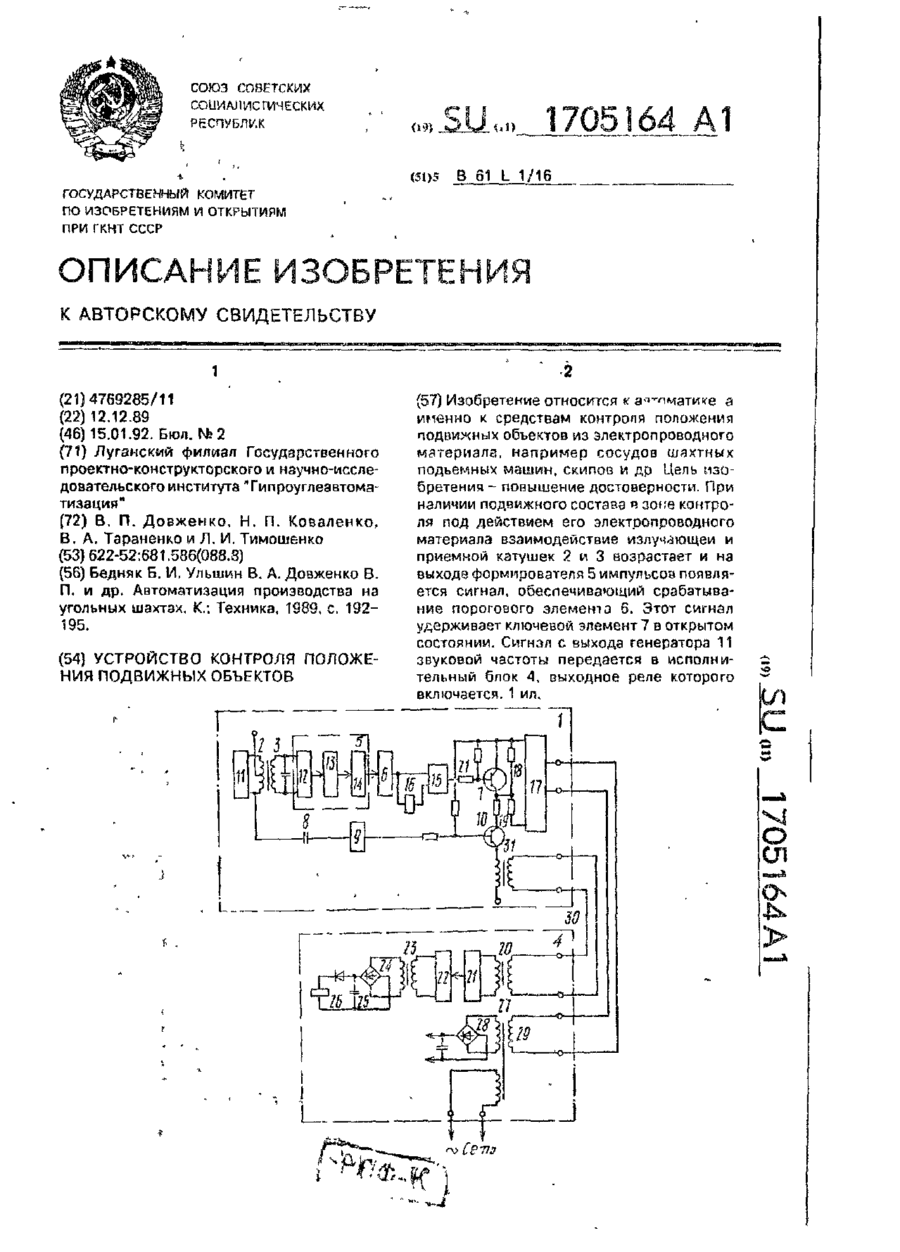
Устройство контроля положения подвижных объектов, содержащее установленные на пути индукционный первичный преобразователь, связанный с приемной катушкой, соединенной через последовательно включенные формирователь импульсов и пороговый элемент с входом одного из ключевых элементов, и исполнительный блок, отличающееся тем, что, с целью повышения достоверности, оно снабжено делителем частоты,1.88входом соединенным через разделительный...
Пристрій контролю місцезнаходження струга та управління приводом стругової установки
Номер патенту: 7687
Опубліковано: 26.12.1995
Автори: Муфель Лев Абрамович, Биковський Олександр Павлович, Голубчиков Олександр Митрофанович, Шапошнік Василь Іванович, Кібрик Ісаак Соломонович
МПК: E21C 27/18
Мітки: приводом, установки, місцезнаходження, контролю, стругової, струга, управління, пристрій
Формула / Реферат:
Устройство контроля местонахождения струга и управления приводом струговой установки, содержащее датчик перемещения струга, соединенный через входной блок с реверсивным счетчиком, ко входам которого подключены, индикатор местонахождения струга и узел задания пределов реверсирования, блок оперативного управления, схему совпадения, блок управления приводом, подключенный к магнитному пускателю электропривода струга, отличающееся тем, что, .с...
Спосіб вимірювання та контролю внутрішнього діаметра трубок для газорозрядних приладів
Номер патенту: 30363
Опубліковано: 15.11.2000
Автори: Лубенець Сергій Васильович, Лисенко Григорій Матвійович, Лисенко Віктор Григорович, Галай Микола Васильович
МПК: H01J 9/42
Мітки: внутрішнього, спосіб, контролю, приладів, діаметра, трубок, газорозрядних, вимірювання
Формула / Реферат:
Спосіб вимірювання та контролю внутрішнього діаметра трубок для газорозрядних приладів, що включає подачу світла від джерела монохроматичного випромінювання на трубку, що вимірюється, через волоконний світловод та лінзи на вхідний отвір, який відрізняється тим, що вимірюють розсіяне випромінювання на вихідному отворі безпосередньо фоторезисторним датчиком, підсилені сигнали фотодатчика, що подають на осцилограф, а потім знімають з екрана...
Попередній патент: Промивна рідина
Наступний патент: Холодильник з регульованим об’ємом
Випадковий патент: Дерматом з секторним механізмом для отримування повношарового, сітчастого епідермотранслокалізаційного аутодермотрансплантата з кратністю збільшення площі від 1 до 2