Синхронно-асинхронний електродвигун з короткозамкненою обмоткою ротора
Номер патенту: 35641
Опубліковано: 16.04.2001
Автори: Антипенко Валентин Іванович, Антипенко Юрій Валентинович, Шеремет Леонід Петрович







Формула / Реферат
1. Синхронно-асинхронный электродвигатель с короткозамкнутой обмоткой ротора, содержащий статор с фазными обмотками, ротор из ферромагнитного материала, отличающийся тем, что он имеет вращательное или линейное выполнение, ротор выполнен из пакета ферромагнитного материала, витки и секции короткозамкнутой обмотки ротора выполнены параллельно или симетрично к его продольной оси, а для напряжения питания фазных обмоток статора введено дополнительное амплитудное изменение, обеспечивающее передачу управляемой энергии из статора в ротор при синхронном режиме работы и определяющее частоту вращения.
2. Синхронно-асинхронный электродвигатель с короткозамкнутой обмоткой ротора по п. 1, отличающийся тем, что при выполнении витков и секций коротко замкнутой обмотки ротора симметрично его продольной оси витки соединены по два встречно между собой в лобовой части.
Текст
1. Синхронно-асинхронный электродвигатель с короткозамкнутой обмоткой ротора, содержащий статор с фазными обмотками, ротор из ферромагнитного материала, отличающийся тем, что он имеет вращательное или линейное выполнение, 35641 ный электродвигатель с короткозамкнутой обмоткой ротора, который может иметь вращательное или конструктивное линейное исполнение, путем выполнения двух требований. Первое - витки и секции любой короткозамкнутой обмотки ротора выполнены параллельно или симметрично к его продольной оси, при этом индуктируемые в них ЭДС магнитным потоком статора вызывают противодействующий синхронизирующий момент при отклонении ротора от точки устойчивого равновесия, т. е. чтобы электродвигатель обладал угловой моментной характеристикой. Второе - для напряжений питания фазных обмоток статора, которые обеспечивают вращающееся магнитное поле статора и асинхронный режим работы, введено дополнительное амплитудное изменение для передачи энергии из статора в ротор при синхронном режиме работы. При этом обеспечить плавное регулирование частоты вращения или скорости поступательного движения в широком диапазоне, повышение КПД, расширение зоны применяемости в различных регулируемых и нерегулируемых маломощных и мощных электроприводах механизмов и систем автоматики, в частности синхронного, синфазного и шагового режимов, применение в безредукторных электроприводах, надежную работу в пожароопасных, взрывоопасных, агрессивных, токсичных, высокотемпературных средах и под водой, использование в синхронном и асинхронном режимах, фиксирование ротора в тормозном режиме при однофазном включении, увеличение угла демпфирования ударного момента, простоту и надежность конструкции. Перечень фигур чертежей: На фиг. 1 условно показан один виток короткозамкнутой обмотки на роторе, выполненный параллельно к его продольной оси dd. На фиг. 2 показан вариант секции из отдельных замкнутых витков короткозамкнутой обмотки явно выраженного ротора, выполненной параллельно к его продольной оси dd. На фиг. 3 показан вариант из нескольких секций, где конец последней соединен с началом первой секции, короткозамкнутой обмотки ротора, выполненной параллельно к его продольной оси dd. На фиг. 4 условно показано по два разностных витка короткозамкнутой обмотки на роторе, выполненные симметрично к его продольной оси dd и соединенные встречно между собой в лобовой части. На фиг. 5 показан вариант секции из веерообразных разностных витков короткозамкнутой обмотки ротора, выполненной симметрично к его продольной оси dd и соединенных соответственно встречно между собой в лобовой части. На фиг. 6 показан вариант: по два разностных витка короткозамкнутой четырехполюсной обмотки ротора, выполненные симметрично к его продольной оси dd и поперечной оси qq, а также соединенные встречно между собой в лобовой части. На фиг. 7 показаны варианты исполнения витков короткозамкнутой обмотки ротора (позиционера), выполненные параллельно (слева) и симмет рично (справа) к его продольной оси линейного электродвигателя. На фиг. 8 условно показан двухфазный синхронный электродвигатель с обмотками статора и короткозамкнутой параллельной обмоткой ротора. На фиг.9 показаны графики угловой моментной характеристики синхронного электродвигателя с короткозамкнутой обмоткой ротора и обычного синхронного электродвигателя с активным коллекторным ротором. Сведения, подтверждающие возможность осуществления изобретения: для достижения поставленной задачи сначала рассмотрим создание синхронного электродвигателя с короткозамкнутой обмоткой ротора, а также бесконтактное управление частотой вращения такого ротора. Для этого необходимо выполнить следующие два требования: 1. Создать короткозамкнутый ротор с точкой устойчивого равновесия по углу нагрузки θ, т.е. чтобы изобретение обладало синхронизирующим моментом или так называемой угловой моментной характеристикой, которая присуща всем синхронным электродвигателям (см., например Л1 стр. 714-721, Л2 стр. 416-417). Это будет достигнуто, если короткозамкнутую обмотку выполнить на пакете ферромагнитного сердечника ротора специальным образом, т.е. необходимо витки и секции любой короткозамкнутой обмотки выполнить параллельно или симметрично к его продольной оси, при этом индуктируемые в них ЭДС магнитным потоком статора вызывают противодействующий синхронизирующий момент при отклонении ротора от точки устойчивого равновесия. На фиг. 1 показан виток короткозамкнутой обмотки на роторе, который выполнен параллельно к его продольной оси dd. На фиг. 4 показаны два разностных витка короткозамкнутой обмотки на роторе, которые выполнены симметрично к его продольной оси dd и соединены встречно между собой в лобовой части. Покажем, что роторы с такими короткозамкнутыми обмотками обладают угловой моментной характеристикой. При нахождении ротора в точке устойчивого равновесия, когда продольная ось ротора dd совпадает с осью магнитного потока статора Фст, т.е. когда угол между ними θ=0, в короткозамкнутой параллельной обмотке на фиг. 1 ЭДС индуктироваться не будет, т.е. результирующий ток ip равен нулю, т.к. эта обмотка будет расположена вдоль магнитного потока, статора, и ее площадь для пересечения потоком равна нулю. В короткозамкнутой симметричной разностной обмотке на фиг. 4 в этих условия х индуктируемые ЭДС в левой и правой секциях будут равны при их идентичности, иметь максимальные значения, но направлены встречно, т.е. и в этом случае результирующий ток ір=і1-i2 будет равен нулю. При отклонении ротора от точки устойчивого равновесия на угол θ в короткозамкнутой параллельной обмотке ротора на фиг. 1 будет индуктироваться ЭДС, пропорциональная sinθ, т.е. пропорциональная увеличению площади пересечения обмотки потоком статора, а в короткозамкнутой симметричной разностной обмотке на фиг. 4 индуктируемая ЭДС левой секции станет больше индуктируемой ЭДС правой секции во столько раз, 2 35641 во сколько раз изменится отношение их площадей пересечения потоком статора и результирующая ЭДС будет пропорциональна sinθ. Эти индуктируемые ЭДС в первом и во втором случае вызывают результирующий ток ip в короткозамкнутой обмотке ротора. В результате взаимодействия этого тока ip с магнитным потоком статора Фст по закону Ампера возникает сила F, действующая на обмотку ротора и создающая противодействующий синхронизирующий момент, который будет стремиться возвратить ротор в точку устойчивого равновесия, т.е. свести угол θ до нуля. Таким образом, электродвигатели с вышеуказанными короткозамкнутыми обмотками ротора, на фиг. 1 и фиг. 4 обладают угловыми моментными характеристиками. На фиг. 2 и фи г. 3 показаны некоторые из возможных вариантов практического исполнения параллельных короткозамкнутых обмоток, аналогичных фиг. 1. На фиг. 5 и фиг. 6 - встречных симметричных короткозамкнутых обмоток, аналогичных фиг. 4. На фиг. 7 показаны статор 1, роторы (позипионеры) 2 и 3, направляющие роторов 4 линейного электродвигателя с двумя возможными вариантами практического исполнения параллельной 5 и симметричной 6 короткозамкнутых обмоток роторов, аналогичных фиг. 1 и 4 соответственно. 2. Обеспечить бесконтактную передачу управляемой электромагнитной мощности из обмотки статора в короткозамкнутую обмотку ротора. В синхронных электродвигателях при установившемся режиме ротор вращается синхронно с вращающимся магнитным полем статора. При этом вращающееся магнитное поле статора является неподвижным относительно вращающегося ротора, не пересекает обмотку ротора и поэтому не может индуктировать в ней каких-либо ЭДС. В этих условиях невозможно обеспечить бесконтактную передачу электромагнитной мощности. Указанная передача мощности будет обеспечена, если вектор Фс вращающегося магнитного потока статора: Фс = Фсм ·еjΩt, Закон изменения модуля магнитного потока статора может быть, например, синусоидальным: Фc= Фсм ·sin(ωt+α)·(cosΩt + jsinΩt) = = Фсм ·sin(ωt+α)·cosΩt + jФсм ·sin(ωt+α)·sinΩt, (4) где ω » Ω, либо периодическим: ФС = [ФС0 + ФС1 sin(ωt+α1)+ФС2 sin(2ωt+α2)+… ...+ ФС n sin(nωt+αn)]·(cosωt +jsinΩt), либо почти периодическим и т.д. В выражении (4) магнитный поток статора Фс состоит из двух взаимно перпендикулярных потоков. В первом синусоидальное изменение амплитуды вектора магнитного потока с частотой ω модулировано фазным косинусоидальным сигналом частоты Ω, а во втором - фазным синусоидальным сигналом частоты Ω. Исходя из этого предлагаемое изобретение можно еще назвать синхронный электродвигатель с короткозамкнутой обмоткой ротора и модулированными потоками (токами или напряжениями питания). Таким образом, в изобретении дополнительное амплитудное изменение модуля вектора магнитного потока, в частности синусоидальное с частотой ω обеспечивает передачу управляемой мощности из обмоток статора в короткозамкнутую обмотку ротора, а фазные сигналы частоты Ω определяют частоту вращения магнитного поля и ротора, которая управляема в широком диапазоне. Для анализа преимуществ изобретения рассмотрим простой двухфазный синхронный электродвигатель с короткозамкнутой параллельной обмоткой неявно выраженного двухполюсного ротора (см. фиг. 8). В нем вращение магнитного поля статора обеспечивается с помощью двух взаимно перпендикулярных статорных обмоток W1 и W2, на которые подаются модулированные фазные напряжения с дополнительным амплитудным изменением по синусоидальному закону с частотой ω: (1) который имеет постоянный по амплитуде модуль Фсм =const и описывает своим концом окружность с частотой Ω, будет дополнительно изменяться еще и по амплитуде по любому временному закону: Фс = Фсм (t)·еjΩt. (5) U1 = U1M·sin(ωt+α)·cosΩt и U2 = U2М·sin(ωt+α)·sinΩt. (2) (6) (7) Токи і 1 и i2 которые возникают в обмотках W1 и W2, идентичны выражениям (6) и (7), порождают магнитные потоки, приведенные в выражении (4). Из выражения (4) видно, что условия передачи управляемой мощности из обмоток статора в короткозамкнутую обмотку ротора определяются амплитудой вектора магнитного потока Фсм частотой его изменения ω и не зависят от частоты вращения Ω магнитного поля и ротора. В этих условиях при неизменных Фсм и ω электродвигатель будет работать с неизменной передачей мощности от максимально возможной до очень низкой частоты вращения ротора, полной его остановки, в шаговом режиме и в режиме фиксации заданного угла, причем его угловая моментная характери Теперь в режиме синхронного вращения магнитный поток статора будет пересекать короткозамкнутую обмотку ротора и индуктировать в ней ЭДС, которая вызывает ток обмотки ротора, взаимодействие которого с магнитным потоком статора, согласно закону Ампера, порождает электромагнитный крутящий момент ротора. При двухфазном электродвигателе со взаимно перпендикулярными обмотками статора, магнитный поток (2) можно разложить по осям этих обмоток. С учетом перехода от показательной к тригонометрической форме записи: Фс = Фсм (t)·(сosΩt+jsinΩt). (3) 3 35641 стика будет определяться только углом нагрузки θ. Расчетным путем с учетом ЛЗ и Л4 авторами получено выражение момента вращения ротора рассматриваемого электродвигателя при низких оборотах и в режиме останова, которое с допустимыми упрощениями имеет вид: М ВР = 2 U ф × sin 2q 2wX LC K 2 (1 / K 2 - sin 2 q ) 2 ществующими синхронными и асинхронными, у которых с уменьшением частоты вращения необходимо уменьшать амплитуду фазного напряжения на обмотках статора, а следовательно, снижается КПД из-за уменьшения и недоиспользования мощности этих электродвигателей. Квадратичная зависимость момента от фазного напряжения обмотки статора имеет недостаток и преимущество. Недостаток заключается в том, что предлагаемый синхронный электродвигатель, как и асинхронный, чувстви телен к уменьшению подводимого напряжения питания. Преимущество заключается в том, что увеличение напряжения питания на каждые 10% вызывает приращение момента вращения на 20%, что позволяет резко повышать перегрузочную способность предлагаемого синхронного электродвигателя в переходных режимах при питании от преобразователя. В режиме холостого хода угол нагр узки θ=0, ток ротора Iр=0 и момент вращения ротора МВР=0. При этом остаются лишь потери мощности сети на перемагничивание ферромагнитных пакетов статора и ротора. А это значит, что потребляемая мощность сети расходуется экономно и прямо пропорционально моменту нагрузки на валу ротора при любой частоте вращения. Это также повышает КПД предлагаемого электродвигателя. При уменьшении и стремлении к нулю активных сопротивлений обмоток статора и ротора электромагнитный момент вращения не уменьшается, электродвигатель остается работоспособным, его КПД возрастает, т. к. исчезают потери мощности в обмотках статора и ротора, кроме вышеуказанных потерь на перемагничивание ферромагнитных пакетов статора и ротора. Поэтому КПД предлагаемого электродвигателя может превосходить КПД асинхронного электродвига-теля, для которого по принципу работы существует предел снижения потерь и повышения КПД. Из вышеизложенного следует, что при сверхнизких температурах, когда наступает сверхпроводимость материалов обмоток статора и ротора, асинхронный электродвигатель теряет работоспособность, а предлагаемый электродвигатель работоспособность не теряет и его КПД стремится к единице. 4. Электромагнитный момент вращения при малых угла х θ пропорционален sin2θ, и достигает максимального значения не при θ=45°, а при 65-80° в зависимости от величины К2. Это является преимуществом, т. к. угол демпфирования ударных моментов и быстро нарастающих нагрузок увеличился почти в два раза. Такой электродвигатель значительно легче переносит ударные нагрузки на валу ротора. На фиг. 9 представлен график угловой моментной характеристики в относительных величинах M1(θ)/Mmax предлагаемого электродвигателя. При этом относительная величина момента вращения зависит только от угла θ и коэффициента связи К2 и не зависит от Uф , ω, XLC, см. (8). А это означает, что все электродвигатели с одинаковыми значениями К2, но с разными значениями Uф , ω, XLC , т. е. электродвигатели разных габаритов и мощностей, имеют одну и ту же угловую моментную характеристику в о тносительных величинах. Пунктирной линией представлен аналогичный график угловой моментной характеристики , (8) где Uф - амплитудное значение фазного напряжения обмотки статора; XLC = ωLc - индуктивное сопротивление обмоток статора; К2 =LM2/LcLp
ДивитисяДодаткова інформація
Назва патенту англійськоюSynchronously-asynchronous electric motor with shorted rotor winding
Автори англійськоюAntypenko Valentyn Ivanovych, Antypenko Yurii Valentynovych, Sheremet Leonid Petrovych
Назва патенту російськоюСинхронно-асинхронный электродвигатель с короткозамкнутой обмоткой ротора
Автори російськоюАнтипенко Валентин Иванович, Антипенко Юрий Валентинович, Шеремет Леонид Петрович
МПК / Мітки
МПК: H02K 17/02, H02K 19/02, H02K 3/18
Мітки: обмоткою, синхронно-асинхронний, електродвигун, ротора, короткозамкненою
Код посилання
<a href="https://ua.patents.su/9-35641-sinkhronno-asinkhronnijj-elektrodvigun-z-korotkozamknenoyu-obmotkoyu-rotora.html" target="_blank" rel="follow" title="База патентів України">Синхронно-асинхронний електродвигун з короткозамкненою обмоткою ротора</a>
Асинхронний електродвигун
Номер патенту: 9182
Опубліковано: 30.09.1996
Автор: Головський Людвіг Петрович
МПК: H02K 11/00
Мітки: електродвигун, асинхронний
Формула / Реферат:
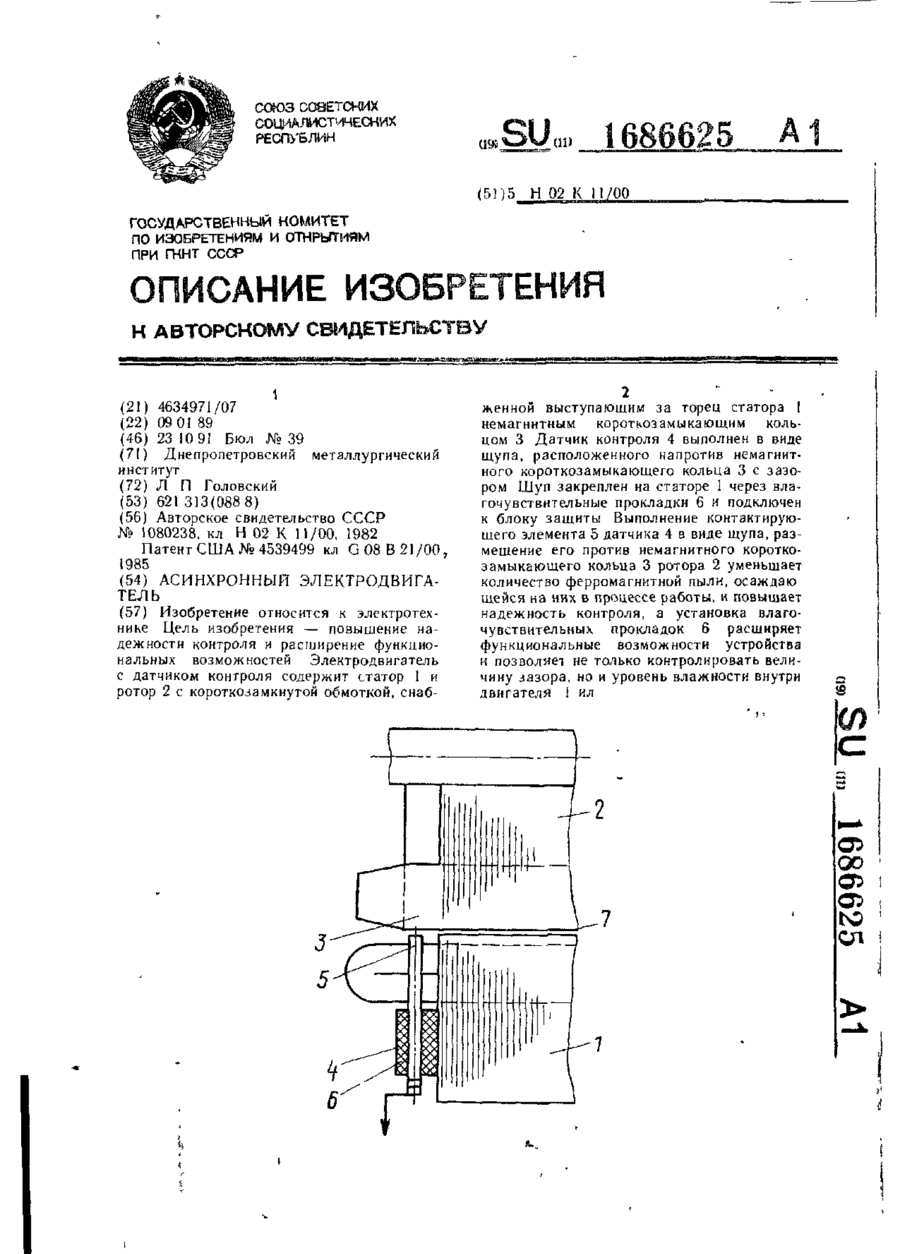
Асинхронный электродвигатель, содержащий статор, ротор с короткозамкнутой обмоткой с немагиитными короткозамыкаюшими кольцами, датчик контроля зазора, контактирующий элемент которого установлен на статоре с возможностью механического взаимодействия с ротором при изменении величины воздушного зазора, и предназначенный для подключения к блоку защиты, отличающийся тем, что, с целью повышения надежности контроля и расширения функциональных...
Асинхронний трифазний електродвигун
Номер патенту: 4695
Опубліковано: 28.12.1994
Автори: Панченко Віктор Іванович, Панченко Володимир Вікторович
МПК: H02K 17/12
Мітки: трифазній, асинхронний, електродвигун
Формула / Реферат:
Асинхронный трехфазный электродвигатель со статором, содержащим 12Р аксиально расположенных зубцов, выполненных в виде пакетов, концы которых в радиальном направлении образуют расточку статора и с одной стороны замкнуты кольцевым ярмом, фазные обмотки, состоящие из 2Р катушечных групп, отстоящих друг от друга на 180 электрических градусов и включенных между собой последовательно-встречно, причем катушки, образующие катушечные группы,...
Реактивний електродвигун

Номер патенту: 8885
Опубліковано: 30.09.1996
Автори: Федоров Олександр Павлович, Гаврилко Сергій Олександрович
МПК: H02K 19/02
Мітки: електродвигун, реактивний
Формула / Реферат:
Реактивный электродвигатель, содержащий явно полюсный ротор, статор в виде двух отдельных магнитопроводов, в виде секторов с центральным углом 90° с четырьмя явно выраженными полюсами каждый и четырехфазной обмотки, каждая фаза которой выполнена из двух катушек, расположенных на полюсах разных магнитопроводов, отличающийся тем, что, с целью повышения равномерности частоты вращения ротора, магнитопроводы статора установлены со смещением...
Ротор асинхронного електродвигуна з короткозамкнутою обмоткою
Номер патенту: 11114
Опубліковано: 25.12.1996
Автор: Бондарєв Віктор Миколайович
МПК: H02K 17/16
Мітки: ротор, обмоткою, асинхронного, електродвигуна, короткозамкнутою
Формула / Реферат:
(57) Ротор асинхронного электродвигателя с короткозамкнутой обмоткой, содержащий шихтованный сердечник с грушевидными пазами и стержнями, выполненными по длине из нескольких частей одинакового поперечного сечения и формы, одни из которых обращены широкой, а другие узкой стороной к внешней поверхности сердечника, и корот коза мыкающие кольца, отличающийся тем, что часть сердечника с пазами и стержнями, обращенными широкой стороной к внешней...
Ротор асинхронної електричної машини з короткозамкнутою обмоткою
Номер патенту: 5766
Опубліковано: 29.12.1994
Автор: Бондарев Віктор Миколайович
МПК: H02K 17/16
Мітки: машини, ротор, електричної, обмоткою, асинхронної, короткозамкнутою
Формула / Реферат:
(57) Ротор асинхронной электрической машины с короткозамкнутой обмоткой, содержащий шихтованный сердечник с грушевидными пазами одинакового поперечного сечения и формы, одни из которых обращены к внешней поверхности сердечника широкой стороной, а другие - узкой стороной, и короткозамкнутую обмотку, о т-личающийся тем, что указанные пазы расположены по периметру ротора симметрично с чередованием, по меньшей мере, через один паз.
Попередній патент: Система керування заглибними водо-нафтопідіймальними електронасосами
Наступний патент: Планетарний циклоїдальний редуктор
Випадковий патент: Система дистанційного контролю рейкового рухомого складу під час руху