Станція радіотехнічної розвідки
Номер патенту: 48403
Опубліковано: 10.03.2010
Автори: Капась Андрій Григорович, Василенко Олександр Васильович, Балема Валентин Опанасович, Степаненко Юрій Костянтинович, Дружинін Володимир Анатолійович, Головін Олексій Олександрович, Клименко Олена Андріївна, Комаров Володимир Олександрович, Семенюк Римма Петрівна, Расстригін Олександр Олексійович

Формула / Реферат
1. Станція радіотехнічної розвідки, що містить транспортний засіб з розміщеними на ньому приймальним пунктом, платформою із закріпленою на ній антеною та пристроєм обертання платформи, при цьому до складу приймального пункту входить індикатор та приймальний канал з розміщеними у ньому послідовно приймачем, підсилювачем і фільтром частот, причому вихід антени зв'язано з входом приймача, вихід фільтра частот зв'язано з входом індикатора за допомогою каналу зв'язку, а пристрій обертання платформи встановлений на приймальному пункті, яка відрізняється тим, що вона додатково містить другу антену, другий приймальний канал, датчик кутової швидкості обертання платформи, схему співпадання, схему вимірювання часу, схему обчислювання дальності, синхронізатор та суматор, при цьому обидві антени закріплено на загальній платформі в одній площині з формуванням рівносигнальних напрямків в азимутальній площині в одну сторону та паралельно між собою, антени встановлено на загальній платформі симетрично відносно точки обертання зазначеної платформи із рознесенням точок кріплення антен на величину певної бази в залежності від довжини по горизонталі кожної з антен з відстанню між осями/центрами антен не менше 0,5 м, схема співпадання введена додатково до кожного з приймальних каналів, до складу приймача кожного з приймальних каналів додатково введено підсилювач надвисокої частоти, амплітудний детектор та відеопідсилювач, антенна решітка кожної з антен виконана у вигляді з'єднаних між собою у площині антени в вертикальному та горизонтальному напрямках антен круглої форми в плані, фільтр частот виконано у вигляді фільтра нижніх частот, підсилювач виконано у вигляді диференціального підсилювача, причому датчик кутової швидкості обертання платформи встановлено на зазначеній платформі і зв'язано з пристроєм обертання платформи, суматор встановлено в каналі зв’язку між фільтром нижніх частот та індикатором так, що перший вихід зазначеного фільтра нижніх частот кожного з приймальних каналів з'єднано з відповідним входом суматора, а вихід зазначеного суматора з'єднано з першим входом індикатора, вихід датчика кутової швидкості обертання платформи з'єднано з першим входом схеми обчислювання дальності, другий вихід фільтра нижніх частот у кожному з приймальних каналів з'єднано з входом схеми співпадання, вихід схеми співпадання кожного з приймальних каналів з'єднано з відповідним входом схеми вимірювання часу, вихід схеми вимірювання часу з'єднано з другим входом схеми обчислювання дальності, вихід схеми обчислювання дальності з'єднано з другим входом індикатора, кожний з виходів синхронізатора з'єднано з відповідним входом приймача та диференціального підсилювача кожного з приймальних каналів, третій вхід схеми обчислювання дальності з'єднано з каналом введення інформації щодо величини бази рознесення точок кріплення антен на загальній платформі, що обертається.
2. Станція за п. 1, яка відрізняється тим, що обертання антен забезпечують/здійснюють відносно центра зазначеної бази, при цьому обертання антен відносно зазначеного центра бази забезпечують із заданою кутовою швидкістю.
Текст
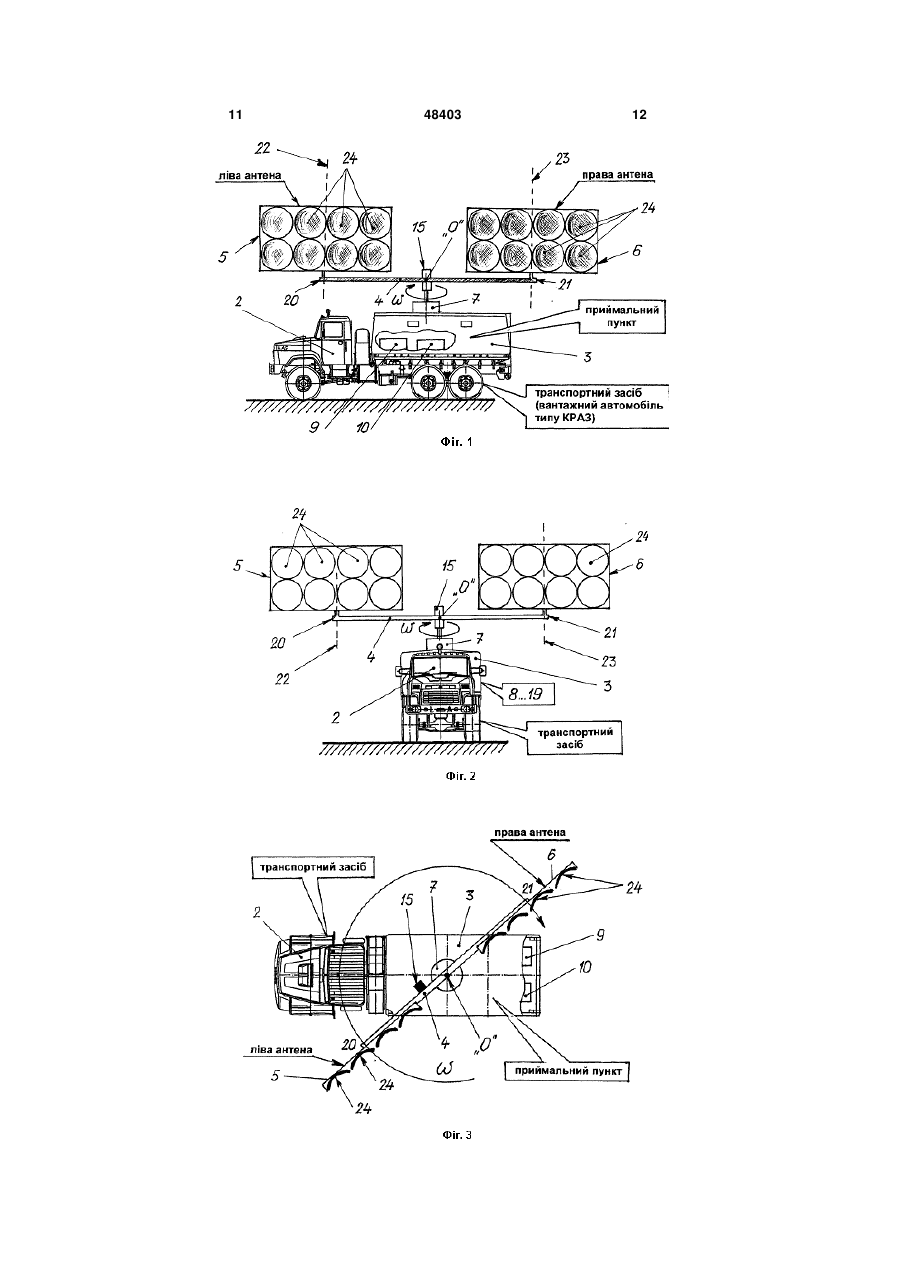
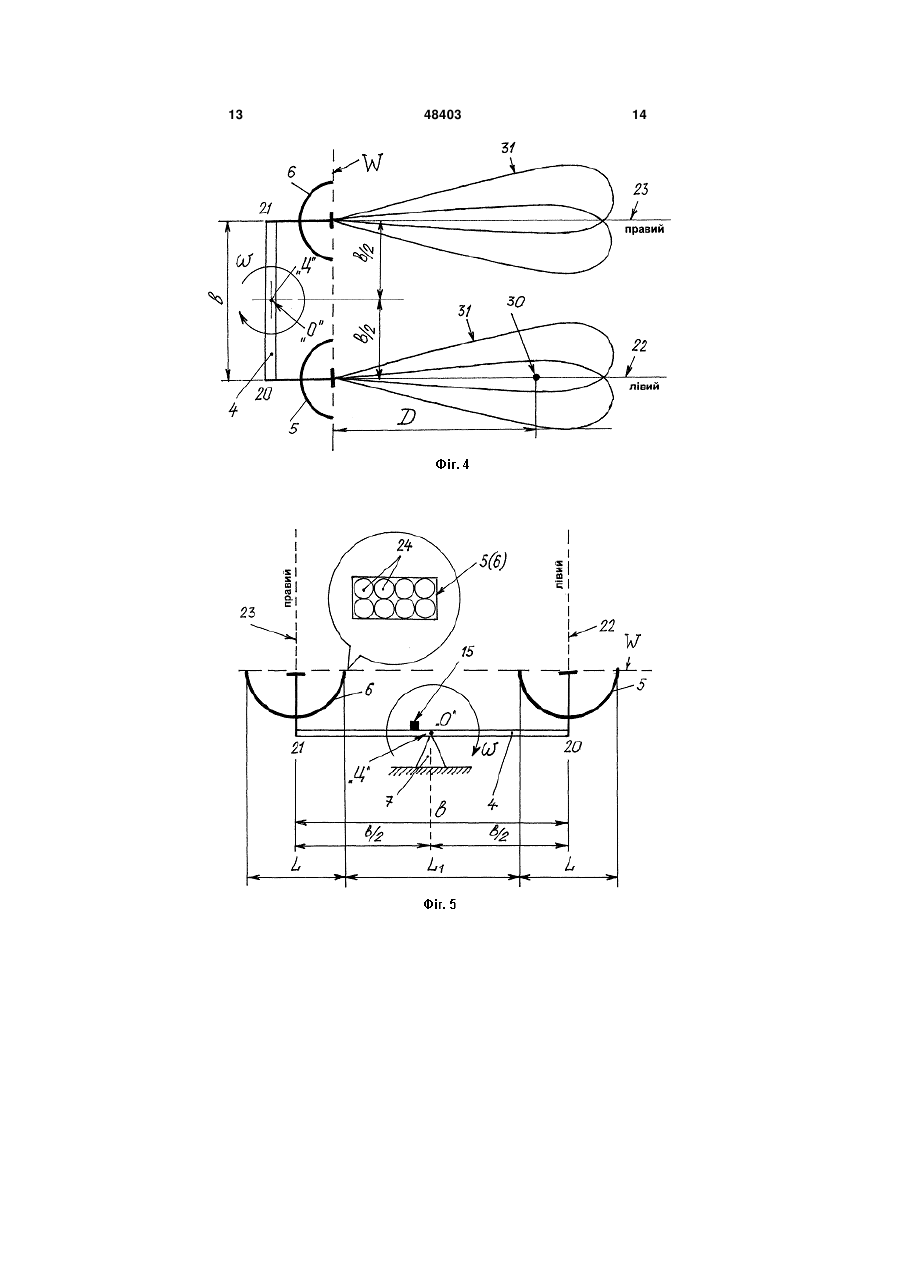
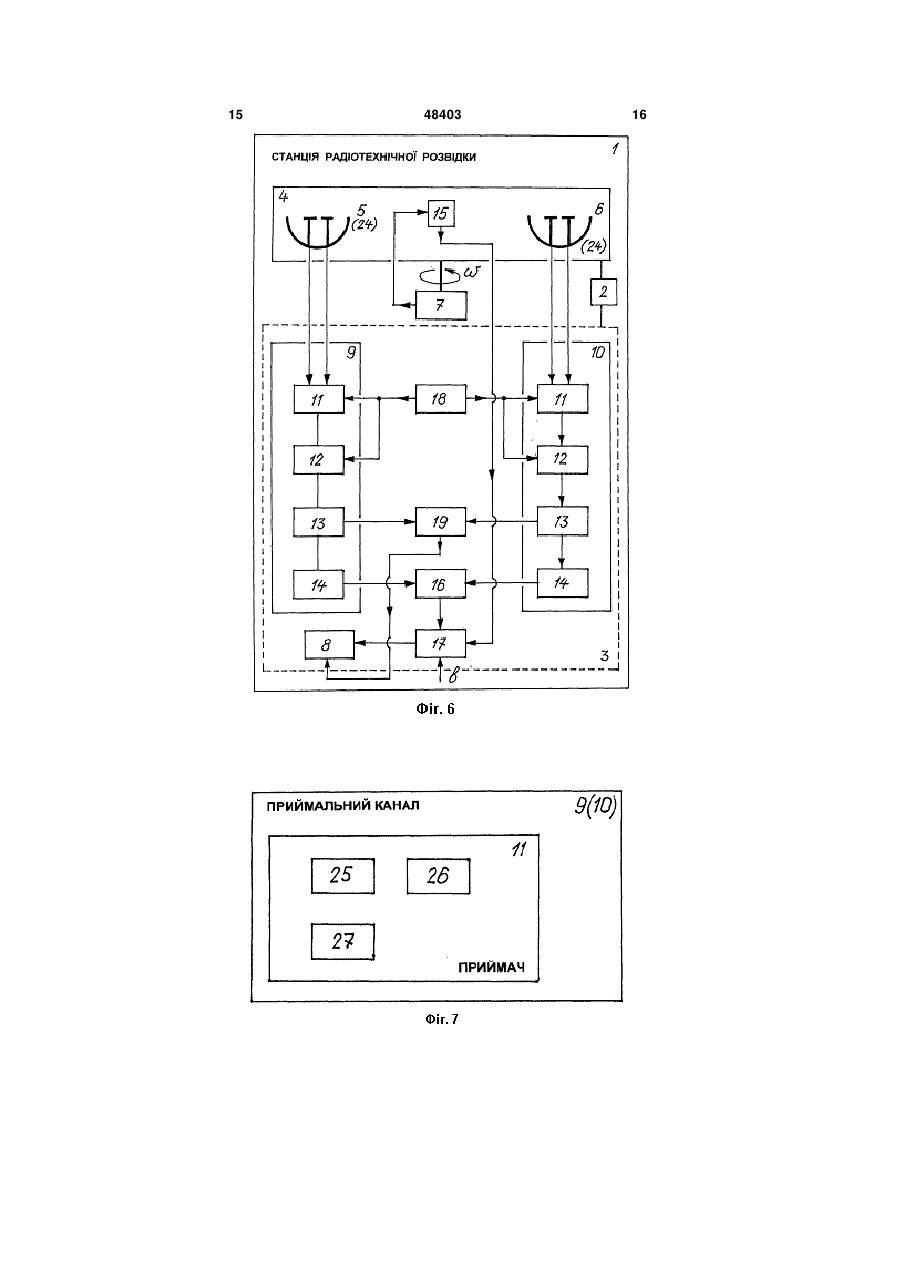
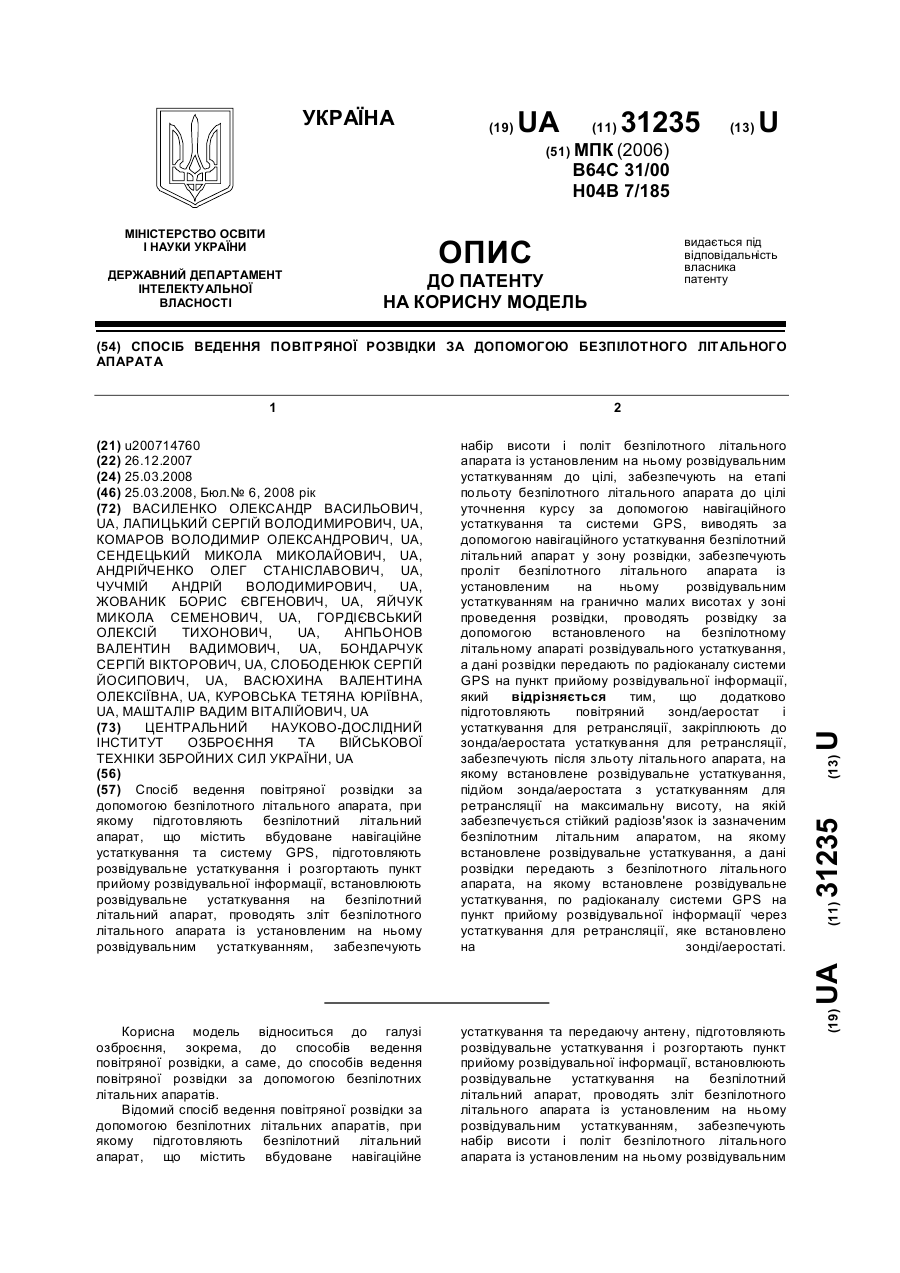
1. Станція радіотехнічної розвідки, що містить транспортний засіб з розміщеними на ньому приймальним пунктом, платформою із закріпленою на ній антеною та пристроєм обертання платформи, при цьому до складу приймального пункту входить індикатор та приймальний канал з розміщеними у ньому послідовно приймачем, підсилювачем і фільтром частот, причому вихід антени зв'язано з входом приймача, вихід фільтра частот зв'язано з входом індикатора за допомогою каналу зв'язку, а пристрій обертання платформи встановлений на приймальному пункті, яка відрізняється тим, що вона додатково містить другу антену, другий приймальний канал, датчик кутової швидкості обертання платформи, схему співпадання, схему вимірювання часу, схему обчислювання дальності, синхронізатор та суматор, при цьому обидві антени закріплено на загальній платформі в одній площині з формуванням рівносигнальних напрямків в азимутальній площині в одну сторону та паралельно між собою, антени встановлено на загальній платформі симетрично відносно точки обертання зазначеної платформи із рознесенням точок кріплення антен на величину певної бази в залежності від довжини по горизонталі кожної з антен з відстанню між осями/центрами антен не менше 0,5 м, схема співпадання введена додатко U 2 (19) 1 3 48403 4 Відома станція радіотехнічного контротання похибки вимірювання координат та ймовірлю/розвідки, що містить антенно-фідерний приності хибних тривог, а також: стрій у вигляді восьмиелементної антенної решіт- неможливість огляду простору у секторі 360° ки, радіоприймальний тракт, що складається з у реальному масштабі часу; малошумних широкосмугових підсилювачів з елек- неможливість вимірювання дальності до тронним комутатором, широкосмуговим пристроєм джерел радіовипромінювання (цілі) з одного прийперетворення частоти, аналоговим пристроєм мального пункту. частотно-часового перетворення сигналів, систему Найбільш близьким технічним рішенням, як по управління, аналізу та обробки сигналів, що скласуті, так і по задачах, які вирішуються, яке обрано дається з пристрою попередньої цифрової обробза найближчий аналог (прототип), є станція радіоки, зміни параметрів сигналів пеленгування джетехнічної розвідки, що містить транспортний засіб рел радіовипромінювань, ПЕОМ управління та з розміщеними на ньому приймальним пунктом, обробки інформації (1). Зазначена конструкція платформою із закріпленою на ній антеною та станції відноситься до систем радіотехнічного конпристроєм обертання платформи, при цьому до тролю/розвідки типу 85В6-СОП-А, що встановлена складу приймального пункту входить індикатор та в складі станції радіотехнічної розвідки СРТР приймальний канал з розміщеними у ньому послі85В6-А «Вега» (Росія), яка призначена для виявдовно приймачем, підсилювачем і фільтром часлення, розпізнання, класифікації і супроводження тот, причому вихід антени зв'язано з входом прийназемних, морських і повітряних об'єктів за випромача, вихід фільтра частот зв'язано з входом мінюванням їх власних радіоелектронних засобів. індикатора за допомогою каналу зв'язку, а приВикористання в станції зазначених вище функціострій обертання платформи встановлений на нальних вузлів і систем дозволяє виконувати віприймальному пункті (3). домою станцією такі основні функції: високошироДо недоліків відомої станції радіотехнічної ротне, широкодіапазонне виявлення джерел звідки, яка обрана за найближчий аналог (проторадіовипромінювань, в тому числі короткочасових, тип), відноситься те, що вона не забезпечує необскладних і шумових сигналів; пеленгування джехідної точності вимірювання кутових координат рел радіовипромінювань шляхом швидкого електповітряних об'єктів, тому що в ній використовуєтьронного сканування; розпізнавання виявлених ся метод пеленгації по максимуму діаграми напраджерел радіовипромінювань; програмна ідентифівленості антени. До недоліків відноситься й те, що кація джерел радіовипромінювань до заданих клавона не забезпечує вимірювання дальності до сів або видів об'єктів; виведення результатів виміджерел радіовипромінювання (цілі) у пасивному рювання параметрів сигналів, пеленгування та режимі. розпізнавання джерел радіовипромінювань на В основу корисної моделі покладена задача екран дисплею. шляхом встановлення другої антени на певній базі До недоліків відомої станції радіотехнічного симетрично відносно центра зазначеної бази, законтролю/розвідки, що перешкоджають досягненбезпечення обертання антен із заданою кутовою ню очікуваного технічного результату, відноситься швидкістю, виконання антенної решітки з антен недостатня ступінь достовірності і повноти обробкруглої форми в плані та введення додаткового ки вхідного потоку сигналів, а також обмежені фунобладнання забезпечити вимірювання дальності кціональні можливості відомої станції, зокрема, до повітряної цілі в пасивному режимі та підвинеможливість вимірювання дальності до цілі з одщення точності вимірювання кутових координат. ного приймального пункту. Суть корисної моделі у станції радіотехнічної Відома станція радіотехнічної розвідки, що мірозвідки, що містить транспортний засіб з розмістить антенно-фідерну систему, радіоприймальщеними на ньому приймальним пунктом, платфоний тракт та систему управління, аналізу та обрормою із закріпленою на ній антеною та пристроєм бки сигналів, при цьому до складу обертання платформи, при цьому до складу прийрадіоприймального тракту входять блок комутації мального пункту входить індикатор та приймальта управління антенно-фідерною системою, баганий канал з розміщеними у ньому послідовно токанальний радіоприймальний пристрій, блок приймачем, підсилювачем і фільтром частот, прикомутації сигналів проміжної частоти, блок комучому вихід антени зв'язано з входом приймача, тації відеосигналів та блок управління станцією вихід фільтра частот зв'язано з входом індикатора автоматизоване робоче місце, до складу системи за допомогою каналу зв'язку, а пристрій обертання управління, аналізу та обробки сигналів входять платформи встановлений на приймальному пункті, обчислювальний комплекс станції, акустополягає в тому, що вона додатково містить другу оптичний вимірювач несучої частоти, супергетеантену, другий приймальний канал, датчик кутової родинний приймач з цифровим керуванням, апашвидкості обертання платформи, схему співпаратура пеленгування, контролер, система селекції дання, схему вимірювання часу, схему обчислюсигналів та вимірювач часових параметрів сигнавання дальності, синхронізатор та суматор. Суть лів (2). корисної моделі полягає і в тому, що обидві антени До недоліків відомої станції радіотехнічної розакріплено на загальній платформі в одній площизвідки відноситься те, що при відомому конструкні з формуванням рівносигнальних напрямків в тивному виконанні є неможливість придушення азимутальній площині в одну сторону та паралесигналів джерел радіовипромінювань, прийнятих льно між собою, антени встановлено на загальній бічними пелюстками діаграми направленості анплатформі симетрично відносно точки обертання тенно-фідерної системи, що призводить до зросзазначеної платформи із рознесенням точок кріплення антен на величину певної бази в залежності 5 48403 6 від довжини по горизонталі кожної з антен з відстен виконана у вигляді з'єднаних між собою у танню між осями/центрами антен не менше 0,5м, площині антени в вертикальному та горизонтальсхема співпадання введена додатково до кожного ному напрямках антен круглої форми в плані, з приймальних каналів, до складу приймача кожфільтр частот виконано у вигляді фільтра нижніх ного з приймальних каналів додатково введено частот, підсилювач виконано у вигляді диференціпідсилювач надвисокої частоти, амплітудний детеального підсилювача, причому датчик кутової ктор та відеопідсилювач, антенна решітка кожної з швидкості обертання платформи встановлено на антен виконана у вигляді з'єднаних між собою у зазначеній платформі і зв'язано з пристроєм оберплощині антени в вертикальному та горизонтальтання платформи, суматор встановлено в каналі ному напрямках антен круглої форми в плані, зв’язку між фільтром нижніх частот та індикатором фільтр частот виконано у вигляді фільтра нижніх так, що перший вихід зазначеного фільтра нижніх частот, підсилювач виконано у вигляді диференцічастот кожного з приймальних каналів з'єднано з ального підсилювача. Суть корисної моделі полявідповідним входом суматора, а вихід зазначеного гає також і в тому, що датчик кутової швидкості суматора з'єднано з першим входом індикатора, обертання платформи встановлено на зазначеній вихід датчика кутової швидкості обертання платплатформі і зв'язано з пристроєм обертання плаформи з'єднано з першим входом схеми обчислютформи, суматор встановлено в каналі зв’язку між вання дальності, другий вихід фільтра нижніх часфільтром нижніх частот та індикатором так, що тот у кожному з приймальних каналів з'єднано з перший вихід зазначеного фільтра нижніх частот входом схеми співпадання, вихід схеми співпаданкожного з приймальних каналів з'єднано з відповіня кожного з приймальних каналів з'єднано з віддним входом суматора, а вихід зазначеного сумаповідним входом схеми вимірювання часу, вихід тора з'єднано з першим входом індикатора, вихід схеми вимірювання часу з'єднано з другим входом датчика кутової швидкості обертання платформи схеми обчислювання дальності, вихід схеми обчиз'єднано з першим входом схеми обчислювання слювання дальності з'єднано з другим входом індальності, другий вихід фільтра нижніх частот у дикатора, кожний з виходів синхронізатора з'єднакожному з приймальних каналів з'єднано з входом но з відповідним входом приймача та схеми співпадання, вихід схеми співпадання кождиференціального підсилювача кожного з прийманого з приймальних каналів з'єднано з відповідним льних каналів, третій вхід схеми обчислювання входом схеми вимірювання часу, вихід схеми видальності з'єднано з каналом введення інформації мірювання часу з'єднано з другим входом схеми щодо величини бази рознесення точок кріплення обчислювання дальності, вихід схеми обчислюантен на загальній платформі, що обертається, вання дальності з'єднано з другим входом індикаобертання антен забезпечують/здійснюють віднотора, кожний з виходів синхронізатора з'єднано з сно центра зазначеної бази, а зазначене обертанвідповідним входом приймача та диференціальноня антен відносно зазначеного центра бази забезго підсилювача кожного з приймальних каналів, печують із заданою кутовою швидкістю. третій вхід схеми обчислювання дальності з'єднаТаким чином станція радіотехнічної розвідки, но з каналом введення інформації щодо величини яка заявляється, відповідає критерію корисної мобази рознесення точок кріплення антен на загальделі «новизна». ній платформі, що обертається. Новим в корисній Суть корисної моделі пояснюється за допомомоделі є й те, що обертання антен забезпечугою ілюстрацій, де на Фіг.1 показана схема консють/здійснюють відносно центра зазначеної бази, труктивного виконання станції радіотехнічної розпри цьому обертання антен відносно зазначеного відки, яка заявляється, на виді збоку (з центра бази забезпечують із заданою кутовою розташуванням площини антени уздовж поздовжшвидкістю. ньої осі транспортного засобу), на Фіг.2 показана Порівняльний аналіз технічного рішення з просхема конструктивного виконання станції радіотетотипом показує, що станція радіотехнічної розвідхнічної розвідки, яка заявляється, на виді спереду ки, яка заявляється, відрізняється тим, що вона (з розташуванням площини антени перпендикулядодатково містить другу антену, другий приймальрно поздовжньої осі транспортного засобу), на ний канал, датчик кутової швидкості обертання Фіг.3 показана схема конструктивного виконання платформи, схему співпадання, схему вимірюванстанції радіотехнічної розвідки, яка заявляється, ня часу, схему обчислювання дальності, синхроніна виді зверху (з розташуванням площини антени затор та суматор, при цьому обидві антени закріпв проміжному положенні при її обертанні), на Фіг.4лено на загальній платформі в одній площині з 5 показані конструктивно-компонувальні схеми формуванням рівносигнальних напрямків в азимурозміщення антен на загальній платформі, що тальній площині в одну сторону та паралельно між обертається, на Фіг.6 показана блок-схема прийсобою, антени встановлено на загальній платфомального пункту станції радіотехнічної розвідки, рмі симетрично відносно точки обертання зазнаяка заявляється, на Фіг.7 показана блок-схема ченої платформи із рознесенням точок кріплення приймача кожного з приймальних каналів, що вхоантен на величину певної бази в залежності від дять до складу приймального пункту станції радіодовжини по горизонталі кожної з антен з відстанню технічної розвідки, яка заявляється, на Фіг.8 покаміж осями/центрами антен не менше 0,5м, схема зана схема визначення дальності базово-часовим співпадання введена додатково до кожного з способом, який реалізується за допомогою станції приймальних каналів, до складу приймача кожного радіотехнічної розвідки, яка заявляється. з приймальних каналів додатково введено підсиСтанція (позиція 1) радіотехнічної розвідки (як лювач надвисокої частоти, амплітудний детектор варіант конструктивного виконання - див. схеми на та відеопідсилювач, антенна решітка кожної з анФіг.1-7) містить транспортний засіб 2 з розміщеним 7 48403 8 на ньому приймальним пунктом (позиція 3), платшвидкості обертання платформи з'єднано з перформою 4 із закріпленими на ній двома антенами шим входом схеми 17 обчислювання дальності, (відповідно, позиції 5 та 6) та пристроєм 7 обердругий вихід фільтра 13 нижніх частот у кожному з тання платформи, при цьому до складу приймальприймальних каналів (відповідно, позиції 9 та 10) ного пункту (позиції 3) входить індикатор 8 та два з'єднано з входом схеми 14 співпадання, вихід приймальних канали (відповідно, позиції 9 та 10) з схеми 14 співпадання кожного з приймальних карозміщеними у ньому послідовно приймачем 11, налів (відповідно, позиції 9 та 10) з'єднано з відпопідсилювачем 12, фільтром 13 частот та схемою відним входом схеми 16 вимірювання часу, вихід 14 співпадання (див. блок-схему на Фіг.6). При схеми 16 вимірювання часу з'єднано з другим вхоцьому фільтр 13 частот виконано у вигляді фільтдом схеми 17 обчислювання дальності, вихід схера нижніх частот, а підсилювач 12 виконано у вими 17 обчислювання дальності з'єднано з другим гляді диференціального підсилювача. Станція (повходом індикатора 8, кожний з виходів синхронізазиція 1) радіотехнічної розвідки (як варіант тора 18 з'єднано з відповідним входом приймача конструктивного виконання - див. схеми на Фіг.1-6) 11 та диференціального підсилювача 12 кожного з додатково містить датчик 15 кутової швидкості приймальних каналів (відповідно, позиції 9 та 10), обертання платформи, схему 16 вимірювання чатретій вхід схеми 17 обчислювання дальності з'єдсу, схему 17 обчислювання дальності, синхронізанано з каналом 29 введення інформації щодо ветор 18 та суматор 19 (див. блок-схему на Фіг.6). личини бази b рознесення точок (позиції 20 та 21) Конструктивно і технологічно обидві антени кріплення антен (відповідно, позиції 5 та 6) на за(відповідно, позиції 5 та 6) закріплено на загальній гальній платформі 4, що обертається (див. блокплатформі 4 в одній площині W з формуванням схему на Фіг.6 та схему на Фіг.5). рівносигнальних напрямків («ЛІВИЙ» та «ПРАТехнологічно обертання антен (відповідно, поВИЙ» - див. схему на Фіг.5) в азимутальній площизиції 5 та 6) забезпечують/здійснюють відносно ні в одну сторону та паралельно між собою (див. центра (позиція «Ц») зазначеної бази b, а саме, в схему на Фіг.3). Антени (відповідно, позиції 5 та 6) точці «О», при цьому обертання антен відносно встановлено на загальній платформі 4 симетрично зазначеного центра (позиція «Ц») бази b (а саме, в відносно точки обертання (позиція «О») зазначеної точці «О») забезпечують із заданою кутовою швиплатформи 4 із рознесенням точок кріплення (віддкістю (див. схеми на Фіг.5 та на Фіг.8). повідно, позиції 20 та 21) антен (відповідно, позиції Станція радіотехнічної розвідки, яка заявля5 та 6) на величину певної бази b в залежності від ється, працює/використовується таким чином. довжини L по горизонталі кожної з антен (відповідДля здійснення способу вимірювання дальноно, позиції 5 та 6) з відстанню L1 між осясті до повітряної цілі (позиція 30 - див. схему на ми/центрами (відповідно, позиції 22 та 23) антен Фіг.8) у пасивному режимі, попередньо підготоввідповідно, позиції 5 та 6) не менше 0,5м - як варіляють систему спостереження повітряних цілей, а ант конструктивного виконання (див. схему на саме, станцію (позиція 1) радіотехнічної розвідки з Фіг.5). Конструктивно антенна решітка кожної з розміщенням приймальних антен (відповідно, поантен (відповідно, позиції 5 та 6) виконана у визиції 5 та 6) зазначеної станції (позиція 1) радіотегляді з'єднаних між собою у площині антени в верхнічної розвідки на певній базі b (на платформі 4) тикальному та горизонтальному напрямках антен (див. схему на Фіг.1-5). 24 круглої форми в плані (див. схеми на Фіг.1-3 та Для здійснення заходів щодо вимірювання дана Фіг.5). льності до повітряної цілі 30 у пасивному режимі Конструктивно датчик 15 кутової швидкості застосовують (як варіант конструктивного викообертання платформи 4 встановлено на зазначенання) зазначену вище систему спостереження ній платформі 4 і зв'язано з пристроєм 7 обертанповітряних цілей (позиція 30) - станцію (позиція 1) ня платформи (див. блок-схему на Фіг.6), а зазнарадіотехнічної розвідки, яка, як варіант конструкчений пристрій 7 обертання платформи тивного виконання, містить дві приймальні антени встановлений на приймальному пункті 2 (див. схе(відповідно, позиції 5 і 6), що розміщені на прийми на Фіг.1-3 та схему на Фіг.5). мальному пункті (позиція 2). При цьому зазначені Конструктивно до складу приймача 11 кожного антени (ліва та права, відповідно, позиції 5 і 6) є з приймальних каналів (відповідно, позиції 9 та 10) розміщеними на загальній платформі (позиція 4) з введено підсилювач 25 надвисокої частоти, амплірознесенням антен (відносно точки «О» обертання тудний детектор 26 та відеопідсилювач 27 (див. о) платформи (позиція 4) - див. схеми на Фіг.4-5 та блок-схему на Фіг.7). схему на Фіг.8) на величину бази b (із рознесенням Конструктивно і технологічно вихід кожної з точок кріплення (відповідно, позиції 20 та 21 - див. антен (позиція 5 та 6) у кожному з приймальних схему на Фіг.5) антен (відповідно, позиції 5 та 6) на каналів (відповідно, позиції 9 та 10) зв'язано з вховеличину зазначеної бази b в залежності від довдом приймача 11, вихід фільтра 13 нижніх частот жини L по горизонталі кожної з антен (відповідно, зв'язано з входом індикатора 8 за допомогою капозиції 5 та 6) з відстанню L1 між осями/центрами налу 28 зв'язку, при цьому суматор 19 встановле(відповідно, позиції 22 та 23) антен (відповідно, но в каналі зв’язку 28 між фільтром 13 нижніх часпозиції 5 та 6) не менше 0,5м - як варіант конструтот та індикатором 8 так, що перший вихід ктивного виконання (див. схему на Фіг.5). зазначеного фільтра 13 нижніх частот кожного з Далі забезпечують обертання антен (позиції 5 і приймальних каналів (відповідно, позиції 9 та 10) 6) станції (позиція 1) радіотехнічної розвідки в гоз'єднано з відповідним входом суматора 19, а виризонтальній площині, при цьому обертання антен хід зазначеного суматора 19 з'єднано з першим (позиції 5 і 6) станції (позиція 1) радіотехнічної ровходом індикатора 8, вихід датчика 15 кутової звідки забезпечують/здійснюють відносно центра 9 48403 10 «Ц» (точка «О») зазначеної бази b, причому засхему на Фіг.8) станції (позиція 1) радіотехнічної розвідки з ціллю 30 і формують першу мітку. безпечують обертання антен (позиції 5 і 6) станПотім засікають момент перетинання рівносиції (позиція 1) радіотехнічної розвідки відносно гнального напрямку діаграми (позиція 31) направзазначеного центра (точка «О») бази b із заданою леності іншої з антен (відповідно, правої (позиція кутовою швидкістю (позиція - див. схеми на 6) - див. схему на Фіг.8) і формують другу мітку. Фіг.1-5 та на Фіг.8). Після цього вимірюють проміжок/інтервал часу Після цього вимірюють при обертанні антен між першою та другою мітками. (позиції 5 і 6) станції (позиція 1) радіотехнічної роНа завершальній стадії обробляють сигнал від звідки поточну кутову швидкість . цілі (позиція 30) з подальшим визначенням дальПродовжують процес тим, що формують двоності («D») до цілі (позиція 30), при цьому дальпроменеву діаграму направленості кожної із антен ність («D») до цілі (позиція 30) обчислюють по ін(позиції 5 і 6) станції (позиція 1) радіотехнічної ротервалу часу між першою та другою міткою. звідки з утворенням рівносигнального напрямку Математично зазначене вище записується та(відповідно, позиція «ЛІВИЙ» для лівої антени 5, ким чином (згідно зі схемою на Фіг.8): та позиція «ПРАВИЙ» для правої антени 6) (див. b=const; D = const; кут '= ; = t [рад]; tg = схеми на Фіг.4-5 та на Фіг.8). При цьому рівносигb/D. нальні напрямки (позиції «ЛІВИЙ» та «ПРАВИЙ») Тоді D = b/tg = b/tg, t паралельні між собою і також рознесені в азимуКрім того, для таких умов значення кута бутальній площині на величину бази b, причому точки кріплення (відповідно, позиції 20 та 21) антен де надзвичайно малим, тому tg = t і тоді оста(відповідно, позиції 5 та 6) рознесені між собою на точна формула для обчислення дальності «D» до величину b/2 відносно центра (позиція «Ц») зазнацілі (позиція 30 - див. схему на Фіг.8) приймає осченої бази b, а саме, точки «О» обертання антен, в таточний вигляд залежності від довжини L по горизонталі кожної з D = b/ t антен (відповідно, позиції 5 та 6) з відстанню L1 На цьому процес вимірювання дальності до між осями/центрами (відповідно, позиції 22 та 23) повітряної цілі (позиція 30 - див. схему на Фіг.8) у антен відповідно, позиції 5 та 6) не менше 0,5м - як пасивному режимі закінчується. варіант конструктивного виконання антенної сисПідвищення ефективності застосування стантеми (див. схему на Фіг.5). ції радіотехнічної розвідки, яка заявляється, у поОскільки база b дорівнює одиницям метрів рівнянні з прототипом, досягається тим, що до її (при розташуванні платформи (позиція 4) на складу введено другу антену, розміщену симетриприймальному пункті (позиція 2), наприклад, на чно з першою антеною відносно центра обертандаху кузова вантажного автомобіля (типу КРАЗ ня, що забезпечує вимірювання дальності до джедив. схеми на Фіг.1-3), а дальність («D») до цілі рел радіовипромінювань в пасивному режимі на (позиція 30) - десятками кілометрів, то час t буде одному приймальному пункті. Підвищення ефекскладати долі мілісекунд. Тому як кутові, так і ративності застосування станції радіотехнічної розвідіальні переміщення джерела радіовипромінювань дки, яка заявляється, у порівнянні з прототипом, (ціль 30) будуть настільки незначними, що ними досягається й тим, що антени станції формують можна знехтувати і вважати, що джерело (ціль 30) двопроменеві діаграми направленості в горизоннерухоме. тальній площині з рівносигнальними напрямками, По закінченню зазначеної операції засікають що, в свою чергу, забезпечує підвищення точності антенами (позиції 5 і 6) станції (позиція 1) радіотевизначення пеленгу цілі. хнічної розвідки пеленг цілі (позиція 30) (див. схеДжерела інформації: ми на Фіг.8). Джерелом радіовипромінювання (по1. Матеріали міжнародної виставки IDEF зиція 30 - ціль) можуть бути: природне TURKIYE-99, 28.09-1.10.1999р. Анкара-Туреччина. радіотеплове випромінювання повітряного об'єкта, Рекламні проспекти фірми «Росвооружение» випромінювання бортових радіоелектронних засоаналог. бів повітряного об'єкта, випромінювання іонізова2. Патент України №39422А від 2001 року ної області атмосфери, що створюється рухом «Станція радіотехнічного контролю», бюл. №5 від повітряного об'єкта (позиція 30) тощо. 15.06.2001. МПК (2006) G01S3/2 - аналог. Далі засікають момент перетинання рівносиг3. Радиолокационная станция П-18МУ. Технинального напрямку (позиція «ЛІВИЙ» або «ПРАческое описание ЕИ1. 001. 015. ТО/С. Часть 1. ВИЙ») діаграми направленості (позиція 31) однієї з Издательство Министерства обороны СССР, 1978 антен (наприклад, лівої антени (позиція 5) - див. -прототип. 11 48403 12 13 48403 14 15 48403 16 17 Комп’ютерна верстка В. Мацело 48403 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюStation of radio-technical survey
Автори англійськоюBalema Valentyn Opanasovych, Vasylenko Oleksandr Vasyliovych, Holovin Oleksii Oleksandrovych, Druzhynin Volodymyr Anatoliiovych, Kapas Andrii Hryhorovych, Klymenko Olena Andriivna, Komarov Volodymyr Oleksandrovych, Rasstryhin Oleksandr Oleksiiovych, Semeniuk Rymma Petrivna, Stepanenko Yurii Kostiantynovych
Назва патенту російськоюСтанция радиотехнической разведки
Автори російськоюБалема Валентин Опанасович, Василенко Александр Васильевич, Головин Алексей Александрович, Дружинин Владимир Анатольевич, Капась Андрей Григорьевич, Клименко Елена Андреевна, Комаров Владимир Александрович, Расстригин Александр Алексеевич, Семенюк Римма Петровна, Степаненко Юрий Константинович
МПК / Мітки
МПК: G01S 13/06
Мітки: станція, радіотехнічної, розвідки
Код посилання
<a href="https://ua.patents.su/9-48403-stanciya-radiotekhnichno-rozvidki.html" target="_blank" rel="follow" title="База патентів України">Станція радіотехнічної розвідки</a>
Спосіб ведення повітряної розвідки за допомогою безпілотного літального апарата
Номер патенту: 31235
Опубліковано: 25.03.2008
Автори: Василенко Олександр Васильович, Слободенюк Сергій Йосипович, Васюхина Валентина Олексіївна, Лапицький Сергій Володимирович, Чучмій Андрій Володимирович, Машталір Вадим Віталійович, Сендецький Микола Миколайович, Куровська Тетяна Юріївна, Комаров Володимир Олександрович, Жованик Борис Євгенович, Андрійченко Олег Станіславович, Бондарчук Сергій Вікторович, Анпьонов Валентин Вадимович, Яйчук Микола Семенович, Гордієвський Олексій Тихонович
МПК: B64C 31/00, H04B 7/185
Мітки: літального, ведення, апарата, допомогою, безпілотного, розвідки, спосіб, повітряної
Формула / Реферат:
Спосіб ведення повітряної розвідки за допомогою безпілотного літального апарата, при якому підготовляють безпілотний літальний апарат, що містить вбудоване навігаційне устаткування та систему GPS, підготовляють розвідувальне устаткування і розгортають пункт прийому розвідувальної інформації, встановлюють розвідувальне устаткування на безпілотний літальний апарат, проводять зліт безпілотного літального апарата із установленим на ньому...
Комплекс радіоелектронної розвідки та радіоелектронної протидії
Номер патенту: 80774
Опубліковано: 25.10.2007
Автори: Гришко Микола Мефодійович, Марченко Василь Васильович, Рябкін Юрій Вікторович, Горбулін Володимир Павлович, Коротков Вячеслав Валентинович, Немчин Олександр Федорович, Яковлев Віталій Васильович
Мітки: радіоелектронної, протидії, розвідки, комплекс
Формула / Реферат:
1. Комплекс радіоелектронної розвідки та радіоелектронної протидії, який містить станцію пункту керування комплексом, станцію багатоцільової радіорозвідки короткохвильового і ультракороткохвильового діапазонів, станції радіозавад короткохвильового та ультракороткохвильового діапазонів, засоби радіозавад яких виконані з діапазоном робочих частот до 150 МГц, станції комплексу виконані мобільними і зв'язані засобами радіозв'язку, який...
Спосіб ведення повітряної розвідки за допомогою безпілотних літальних апаратів
Номер патенту: 30815
Опубліковано: 11.03.2008
Автори: Твердохлібов Володимир Віталійович, Ревенко Дмитро Леонідович, Богучарський В''ячеслав Вікторович, Дроговоз Костянтин Віталійович, Лапицький Сергій Володимирович, Сушин Олексій Миколайович, Василенко Олександр Васильович, Яйчук Микола Семенович, Скіпор Едуард Рішардович, Голенковська Тетяна Ігорівна, Іванов Борис Павлович
МПК: H04B 7/00, B64C 31/00
Мітки: розвідки, апаратів, ведення, допомогою, літальних, повітряної, безпілотних, спосіб
Формула / Реферат:
1. Спосіб ведення повітряної розвідки за допомогою безпілотних літальних апаратів, при якому підготовляють безпілотний літальний апарат, що містить убудоване навігаційне устаткування та систему GPS, підготовляють розвідувальне устаткування і розгортають пункт прийому розвідувальної інформації, встановлюють розвідувальне устаткування на безпілотний літальний апарат, проводять зліт безпілотного літального апарата із встановленим на ньому...
Спосіб сейсмічної розвідки

Номер патенту: 59675
Опубліковано: 16.05.2005
Автори: Мегедь Григорій Власович, Мармалевський Наум Янкелевич, Роганов Юрій В'ячеславович, Дуброва Галина Борисівна
МПК: G01V 1/00
Мітки: спосіб, розвідки, сейсмічної
Формула / Реферат:
Радіостанція підвищеної завадозахищеності, що містить передавач, приймач, антенну, яка відрізняється тим, що до неї додатково запроваджено антенний комутатор, панорамний приймач, аналізатор рівня завади в частотному діапазоні, аналізатор рівня завади в просторі (в системі координат х-у), перетворювач рівня завад в частотному діапазоні в рівень завад у площині (в систему координат y-z), блок електронної карти, при цьому перший вхід антенного...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52649
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: станція, вимірювання, координат, випромінювання, джерел, пасивна
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший вихід пеленгаторної станції з'єднаний з входом БОППГ, яка відрізняється тим, що в неї додатково введені блок визначення швидкості зміни пеленга (БВШЗП), блок визначення дальності, схема порівняння, оперативний...
Попередній патент: Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів
Наступний патент: Конденсатовідвідник
Випадковий патент: Спосіб діагностики гострої хірургічної патології живота