Позиціонер
Номер патенту: 53824
Опубліковано: 25.10.2010


Формула / Реферат
1. Позиціонер, який характеризується тим, що складається з засобу для утримування об'єкта позиціонуваня, що являє собою принаймні один опорний стояк або принаймні один опорний стояк і принаймні один тримач, виконаний з можливістю утримування на принаймні одному опорному стояку, причому опорний стояк містить основу змінної дожини, яка має принаймні один профіль, принаймні один засіб для зміни довжини основи, поєднаний з принаймні одним її профілем, принаймні один пружний елемент, поєднаний з основою з можливістю деформації під дією засобу для зміни довжини основи, при цьому принаймні один опорний стояк містить принаймні два засоби для лінійного переміщення, що поєднані з протилежними кінцями його основи, з індикатора положення, що містить лазер, виконаний з можливістю визначення своїм випромінюванням площини під потрібним кутом до горизонту, та вказівник для випромінювання лазера, що розміщений або на об'єкті позиціонування і/або на об'єктах, що постійно пов'язані з ним, і/або на принаймні одному опорному стоякові, і/або на засобах, що пов'язані з ним, з принаймні двох засобів для керування і регулювання роботи приводу, кожен з яких пов'язаний з відповідним засобом для лінійного переміщення опорного стояка і з вказівником для випромінювання лазера індикатора положення.
2. Позиціонер за п. 1, який відрізняється тим, що основа опорного стояка складається з одного профілю і з принаймні одного засобу для зміни довжини основи, який поєднаний з профілем і виконаний в вигляді змінного по довжині елемента, який являє собою або лінійний елемент, або лінійний модуль, або лінійний електродвигун.
3. Позиціонер за п. 1, який відрізняється тим, що основа опорного стояка складається з принаймні двох профілів, що виконані з можливістю прямолінійного переміщення один відносно другого, з принаймні одного засобу для зміни довжини основи, який поєднаний з ними.
4. Позиціонер за п. 3, який відрізняється тим, що засіб для зміни довжини основи являє собою механічну передачу.
5. Позиціонер за п. 4, який відрізняється тим, що засіб для зміни довжини основи має або ручний, або механічний, або електричний привід.
6. Позиціонер за п. 3, який відрізняється тим, що засіб для зміни довжини основи виконаний в вигляді змінного по довжині елемента, який являє собою або лінійний елемент, або лінійний модуль, або лінійний електродвигун.
7. Позиціонер за будь-яким з пп. 1-6, який відрізняється тим, що засіб для зміни довжини основи містить засіб для утримування, виконаний з можливістю приєднання або в певному, або в будь-якому місці до принаймні одного профілю основи.
8. Позиціонер за будь-яким з пп. 1-7, який відрізняється тим, що привід засобу для зміни довжини основи виконаний з можливістю здійснення або ручного керування, або керування засобом для керування і регулювання роботи приводу.
9. Позиціонер за будь-яким з пп. 1-8, який відрізняється тим, що складові елементи засобу для зміни довжини основи розміщені зовні і/або всередині принаймні одного профілю основи опорного стояка.
10. Позиціонер за будь-яким з пп. 1-9, який відрізняється тим, що основа опорного стояка мітить принаймні один додатковий профіль, виконаний з можливістю рознімного з'єднання і/або телескопічного розсування з принаймні одним її профілем.
11. Позиціонер за будь-яким з пп. 1-10, який відрізняється тим, що основа опорного стояка мітить принаймні один торцевий елемент.
12. Позиціонер за п. 11, який відрізняється тим, що торцевий елемент виконаний з пружного матеріалу, який має високий коефіцієнт тертя з опорною поверхнею.
13. Позиціонер за будь-яким з пп. 1-12, який відрізняється тим, що пружний елемент опорного стояка виконаний в вигляді або принаймні однієї пружини і/або принаймні однієї пластини з пружного матеріалу, і/або торцевих елементів, або в вигляді заповненого газом циліндра з поршнем.
14. Позиціонер за п. 13, який відрізняється тим, що пружний елемент поєднаний з принаймні одним профілем основи і/або з засобом для зміни довжини основи, і/або з засобом для лінійного переміщення.
15. Позиціонер за будь-яким з пп. 1-14, який відрізняється тим, що засіб для лінійного переміщення являє собою або лінійний модуль, або лінійний електродвигун.
16. Позиціонер за будь-яким з пп. 1-14, який відрізняється тим, що засіб для лінійного переміщення складається з або двох лінійних модулів, або двох лінійних електродвигунів, напрямні яких встановлено перпендикулярно між собою, при цьому напрямна (рухома ланка) одного з них виконана з можливістю приєднання до основи опорного стояка, а до його рухомої ланки (напрямної) прикріплено напрямну (рухому ланку) другого.
17. Позиціонер за будь-яким з пп. 15, 16, який відрізняється тим, що засіб для лінійного переміщення містить торцевий елемент, виконаний з пружного матеріалу.
18. Позиціонер за будь-яким з пп. 15-17, який відрізняється тим, що складові елементи засобу для лінійного переміщення розміщені зовні і/або всередині профілю основи, або на засобі для зміни довжини основи.
19. Позиціонер за будь-яким з пп. 15-18, який відрізняється тим, що засіб для лінійного переміщення виконаний з можливістю керування і регулювання роботи приводу засобу для прямолінійного переміщення рухомої ланки вздовж напрямної.
20. Позиціонер за будь-яким з пп. 1-19, який відрізняється тим, що тримач виконаний з можливістю рознімного приєднання до принаймні одного профілю основи опорного стояка.
21. Позиціонер за будь-яким з пп. 1-19, який відрізняється тим, що тримач жорстко приєднаний до принаймні одного профілю основи опорного стояка.
22. Позиціонер за будь-яким з пп. 1-19, який відрізняється тим, що тримач виконаний з можливістю безперешкодного прямолінійного переміщення вздовж основи опорного стояка.
23. Позиціонер за п. 22, який відрізняється тим, що тримач містить принаймні одну каретку, що виконана з можливістю безперешкодного переміщення принаймні вздовж одного профілю основи опорного стояка та фіксації на ньому.
24. Позиціонер за п. 22, який відрізняється тим, що тримач являє собою принаймні одну каретку, що виконана з можливістю безперешкодного переміщення принаймні вздовж одного профілю основи опорного стояка та фіксації на ньому і з можливістю утримування об'єкта позиціонування.
25. Позиціонер за будь-яким з пп. 23, 24, який відрізняється тим, що каретка містить засіб для переміщення каретки, привід якого виконаний з можливістю здійснення або ручного керування, або керування засобом для управління і регулювання роботи приводу.
26. Позиціонер за п. 20, який відрізняється тим, що тримач складається з П-подібної металевої деталі, на кожній з протилежних бічних сторін якої виконано наскрізний отвір з різзю, в який вгвинчено затискний гвинт, з металевої пластини, що приєднана до П-подібної деталі, з металевого упора, що утримується з можливістю прямолінійного переміщення металевою пластиною.
27. Позиціонер за будь-яким з пп. 20-22, який відрізняється тим, що тримач складається з металевої пластини, що має два виступи - упори, три наскрізні отвори, два з яких виконано на її кінцях, з гумової пластини, що приєднана до металевої пластини, з важільного механізму, який шарнірно з'єднаний з металевою пластиною через наскрізні отвори на її кінцях і містить шарнірно з'єднані між собою важіль і скобу.
28. Позиціонер за п. 23, який відрізняється тим, що тримач складається з Г-подібної деталі і з каретки з виступом, що мають спряжені частини для прямолінійного переміщення Г-подібної деталі вздовж каретки.
29. Позиціонер за будь-яким з пп. 1-28, який відрізняється тим, що засіб для утримування об'єкта позиціонування має поверхню, яка повторює форму контактуючої з нею поверхні об'єкта позиціонування.
30. Позиціонер за будь-яким з пп. 1-29, який відрізняється тим, що індикатор положення містить або лінійний лазер, або ротаційний лазер.
31. Позиціонер за п. 30, який відрізняється тим, що лазер індикатора положення являє собою саморегульований лазер.
32. Позиціонер за будь-яким з пп. 1-31, який відрізняється тим, що вказівник для випромінювання лазера являє собою візирну лінію, нанесену на принаймні одну з бокових поверхонь об'єкта позиціонування або засобу для утримування об'єкта позиціонування, і/або принаймні два електронно-оптичні приймачі.
33. Позиціонер за п. 32, який відрізняється тим, що електронно-оптичні приймачі виконані з можливістю утримування або на об'єкті позиціонування і/або на об'єктах, що пов'язані з ним, і/або на засобі для утримування об'єкта позиціонування, і/або на засобах, що пов'язані з ним, так, що їх візири знаходяться на однаковій відстані і паралельні до робочої поверхні об'єкта позиціонування і/або засобу для утримування об'єкта позиціонування.
34. Позиціонер за будь-яким з пп. 32, 33, який відрізняється тим, що електронно-оптичні приймачі виконані з можливістю повороту навколо осі, що перпендикулярна до площини, що визначена випромінюванням лазера індикатора положення.
35. Позиціонер за будь-яким з пп. 1-34, який відрізняється тим, що кожен електронно-оптичний приймач вказівника для випромінювання лазера виконаний з можливістю створення сигналу з його світлочутливої зони під дією випромінювання лазера індикатора положення.
36. Позиціонер за будь-яким з пп. 1-35, який відрізняється тим, що засіб для керування і регулювання роботи приводу виконаний з можливістю вмикання/вимикання приводу засобу для прямолінійного переміщення рухомої ланки вздовж напрямної засобу для лінійного переміщення під дією сигналів, що створені пов'язаним з ним електронно-оптичним приймачем вказівника для випромінювання лазера індикатора положення.
Текст
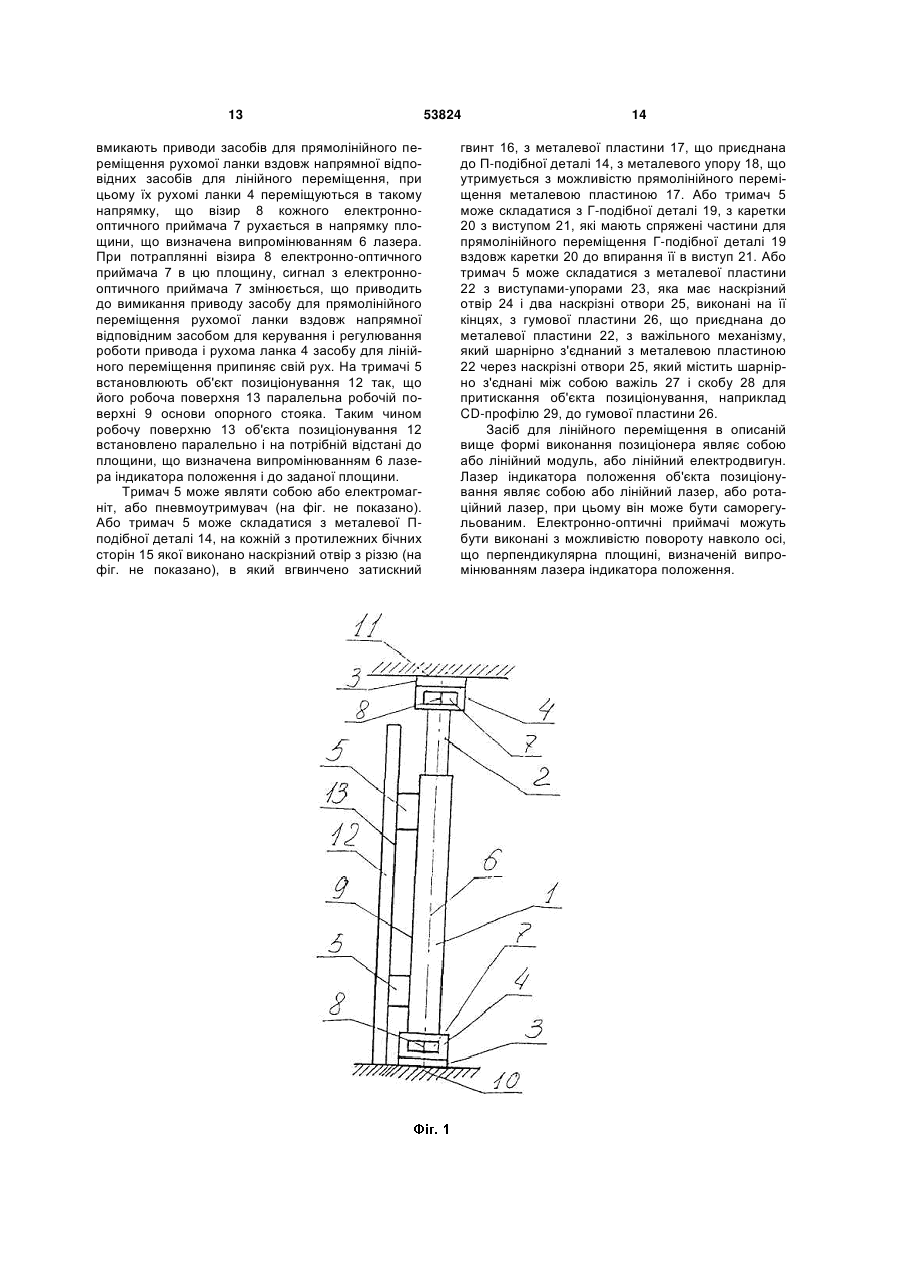
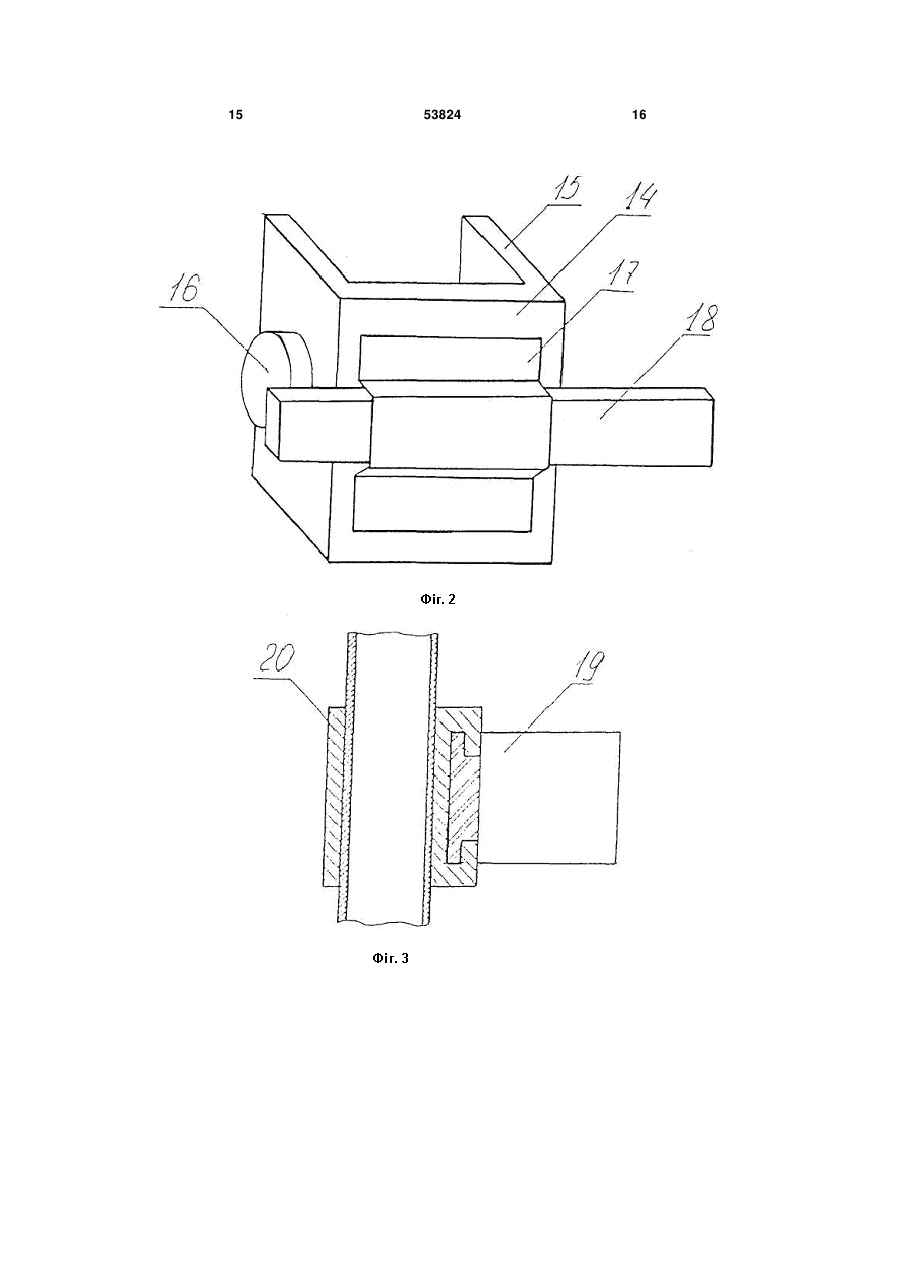
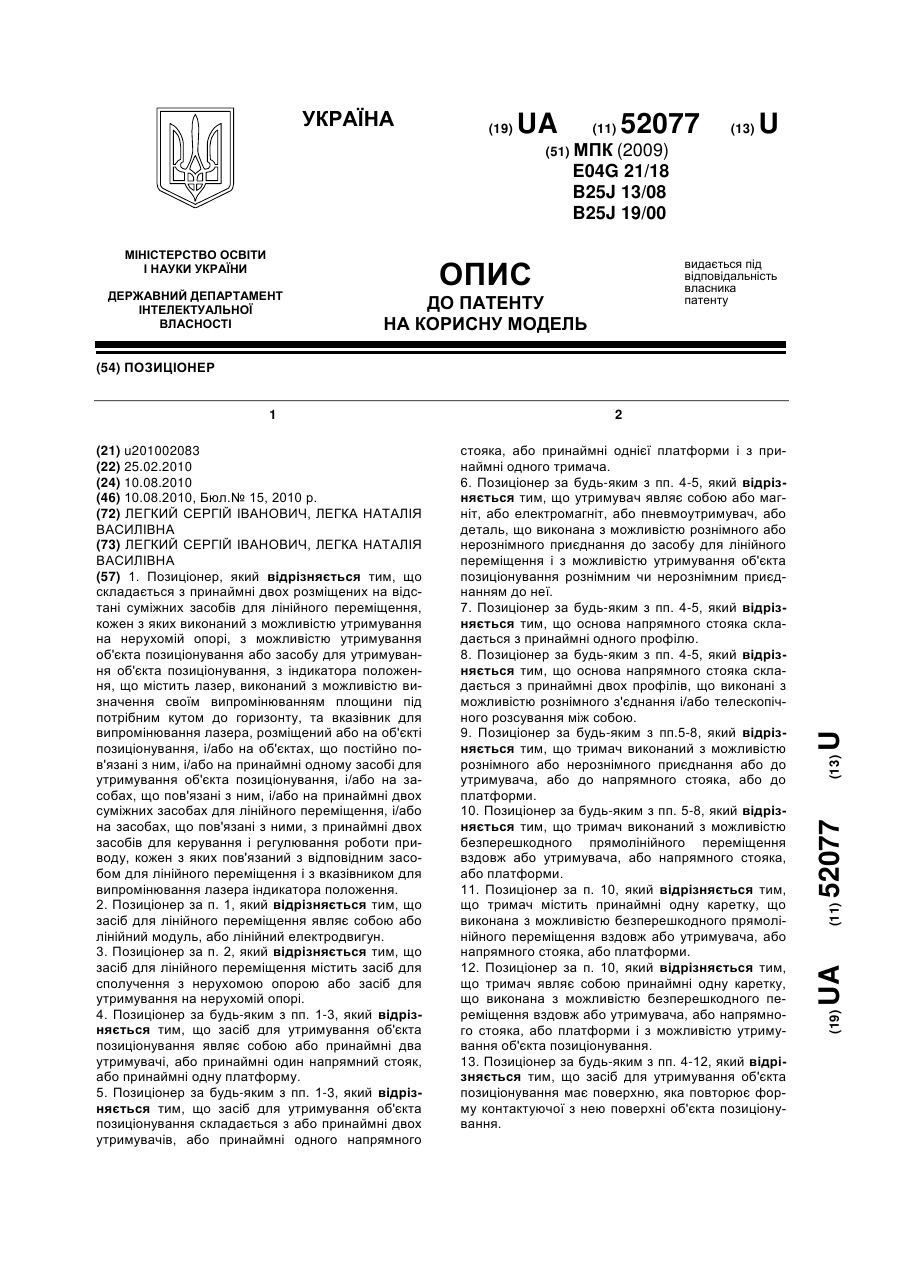
1. Позиціонер, який характеризується тим, що складається з засобу для утримування об'єкта позиціонуваня, що являє собою принаймні один опорний стояк або принаймні один опорний стояк і принаймні один тримач, виконаний з можливістю утримування на принаймні одному опорному стояку, причому опорний стояк містить основу змінної дожини, яка має принаймні один профіль, принаймні один засіб для зміни довжини основи, поєднаний з принаймні одним її профілем, принаймні один пружний елемент, поєднаний з основою з можливістю деформації під дією засобу для зміни довжини основи, при цьому принаймні один опорний стояк містить принаймні два засоби для лінійного переміщення, що поєднані з протилежними кінцями його основи, з індикатора положення, що містить лазер, виконаний з можливістю визначення своїм випромінюванням площини під потрібним кутом до горизонту, та вказівник для випромінювання лазера, що розміщений або на об'єкті позиціонування і/або на об'єктах, що постійно пов'язані з ним, і/або на принаймні одному опорному стоякові, і/або на засобах, що пов'язані з ним, з принаймні двох засобів для керування і регулювання роботи приводу, кожен з яких пов'язаний з відповідним засобом для лінійного переміщення опорного стояка і з вказівником для випромінювання лазера індикатора положення. 2. Позиціонер за п. 1, який відрізняється тим, що основа опорного стояка складається з одного профілю і з принаймні одного засобу для зміни довжини основи, який поєднаний з профілем і виконаний в вигляді змінного по довжині елемента, який являє собою або лінійний елемент, або лінійний модуль, або лінійний електродвигун. 3. Позиціонер за п. 1, який відрізняється тим, що основа опорного стояка складається з принаймні двох профілів, що виконані з можливістю прямолі 2 (19) 1 3 заповненого газом циліндра з поршнем. 14. Позиціонер за п. 13, який відрізняється тим, що пружний елемент поєднаний з принаймні одним профілем основи і/або з засобом для зміни довжини основи, і/або з засобом для лінійного переміщення. 15. Позиціонер за будь-яким з пп. 1-14, який відрізняється тим, що засіб для лінійного переміщення являє собою або лінійний модуль, або лінійний електродвигун. 16. Позиціонер за будь-яким з пп. 1-14, який відрізняється тим, що засіб для лінійного переміщення складається з або двох лінійних модулів, або двох лінійних електродвигунів, напрямні яких встановлено перпендикулярно між собою, при цьому напрямна (рухома ланка) одного з них виконана з можливістю приєднання до основи опорного стояка, а до його рухомої ланки (напрямної) прикріплено напрямну (рухому ланку) другого. 17. Позиціонер за будь-яким з пп. 15, 16, який відрізняється тим, що засіб для лінійного переміщення містить торцевий елемент, виконаний з пружного матеріалу. 18. Позиціонер за будь-яким з пп. 15-17, який відрізняється тим, що складові елементи засобу для лінійного переміщення розміщені зовні і/або всередині профілю основи, або на засобі для зміни довжини основи. 19. Позиціонер за будь-яким з пп. 15-18, який відрізняється тим, що засіб для лінійного переміщення виконаний з можливістю керування і регулювання роботи приводу засобу для прямолінійного переміщення рухомої ланки вздовж напрямної. 20. Позиціонер за будь-яким з пп. 1-19, який відрізняється тим, що тримач виконаний з можливістю рознімного приєднання до принаймні одного профілю основи опорного стояка. 21. Позиціонер за будь-яким з пп. 1-19, який відрізняється тим, що тримач жорстко приєднаний до принаймні одного профілю основи опорного стояка. 22. Позиціонер за будь-яким з пп. 1-19, який відрізняється тим, що тримач виконаний з можливістю безперешкодного прямолінійного переміщення вздовж основи опорного стояка. 23. Позиціонер за п. 22, який відрізняється тим, що тримач містить принаймні одну каретку, що виконана з можливістю безперешкодного переміщення принаймні вздовж одного профілю основи опорного стояка та фіксації на ньому. 24. Позиціонер за п. 22, який відрізняється тим, що тримач являє собою принаймні одну каретку, що виконана з можливістю безперешкодного переміщення принаймні вздовж одного профілю основи опорного стояка та фіксації на ньому і з можливістю утримування об'єкта позиціонування. 25. Позиціонер за будь-яким з пп. 23, 24, який відрізняється тим, що каретка містить засіб для переміщення каретки, привід якого виконаний з можливістю здійснення або ручного керування, або керування засобом для управління і регулювання роботи приводу. 26. Позиціонер за п. 20, який відрізняється тим, що тримач складається з П-подібної металевої 53824 4 деталі, на кожній з протилежних бічних сторін якої виконано наскрізний отвір з різзю, в який вгвинчено затискний гвинт, з металевої пластини, що приєднана до П-подібної деталі, з металевого упора, що утримується з можливістю прямолінійного переміщення металевою пластиною. 27. Позиціонер за будь-яким з пп. 20-22, який відрізняється тим, що тримач складається з металевої пластини, що має два виступи - упори, три наскрізні отвори, два з яких виконано на її кінцях, з гумової пластини, що приєднана до металевої пластини, з важільного механізму, який шарнірно з'єднаний з металевою пластиною через наскрізні отвори на її кінцях і містить шарнірно з'єднані між собою важіль і скобу. 28. Позиціонер за п. 23, який відрізняється тим, що тримач складається з Г-подібної деталі і з каретки з виступом, що мають спряжені частини для прямолінійного переміщення Г-подібної деталі вздовж каретки. 29. Позиціонер за будь-яким з пп. 1-28, який відрізняється тим, що засіб для утримування об'єкта позиціонування має поверхню, яка повторює форму контактуючої з нею поверхні об'єкта позиціонування. 30. Позиціонер за будь-яким з пп. 1-29, який відрізняється тим, що індикатор положення містить або лінійний лазер, або ротаційний лазер. 31. Позиціонер за п. 30, який відрізняється тим, що лазер індикатора положення являє собою саморегульований лазер. 32. Позиціонер за будь-яким з пп. 1-31, який відрізняється тим, що вказівник для випромінювання лазера являє собою візирну лінію, нанесену на принаймні одну з бокових поверхонь об'єкта позиціонування або засобу для утримування об'єкта позиціонування, і/або принаймні два електроннооптичні приймачі. 33. Позиціонер за п. 32, який відрізняється тим, що електронно-оптичні приймачі виконані з можливістю утримування або на об'єкті позиціонування і/або на об'єктах, що пов'язані з ним, і/або на засобі для утримування об'єкта позиціонування, і/або на засобах, що пов'язані з ним, так, що їх візири знаходяться на однаковій відстані і паралельні до робочої поверхні об'єкта позиціонування і/або засобу для утримування об'єкта позиціонування. 34. Позиціонер за будь-яким з пп. 32, 33, який відрізняється тим, що електронно-оптичні приймачі виконані з можливістю повороту навколо осі, що перпендикулярна до площини, що визначена випромінюванням лазера індикатора положення. 35. Позиціонер за будь-яким з пп. 1-34, який відрізняється тим, що кожен електронно-оптичний приймач вказівника для випромінювання лазера виконаний з можливістю створення сигналу з його світлочутливої зони під дією випромінювання лазера індикатора положення. 36. Позиціонер за будь-яким з пп. 1-35, який відрізняється тим, що засіб для керування і регулювання роботи приводу виконаний з можливістю вмикання/вимикання приводу засобу для прямолінійного переміщення рухомої ланки вздовж напрямної засобу для лінійного переміщення під ді 5 53824 6 єю сигналів, що створені пов'язаним з ним електронно-оптичним приймачем вказівника для випро мінювання лазера індикатора положення. Корисна модель відноситься до галузі машинобудування, робототехніки, будівельної техніки тощо, а саме до пристроїв для забезпечення позиціонування об'єкта позиціонування (робочого органу чи інструменту, оброблювальної деталі, профілю під час монтажу плоского каркасу, наприклад, СД профілю, опорного стояка будівельного пристрою, форми під час створення маяків із будівельного розчину, металевого профільованого маяка під час його монтажу, огороджувальних конструкцій, дверей тощо) з високою точністю. Крім того, такий позиціонер може входити до складу пристроїв для позиціонування їх складових частин. Поняття «опорна поверхня» використане в значенні поверхня, на яку опирається пристрій. Поняття «робоча поверхня об'єкта позиціонування» використане в значенні поверхня об'єкта позиціонування, яку встановлюють паралельно і на потрібній відстані до площини, що визначена випромінюванням лазера. Поняття «робоча поверхня засобу для утримування об'єкта позиціонування» використане в значенні поверхня засобу для утримування об'єкта позиціонування, яку встановлюють паралельно і на потрібній відстані до площини, що визначена випромінюванням лазера. Поняття «позиціонування об'єкта позиціонування» використано в значенні встановлення робочої поверхні об'єкта позиціонування паралельно і на потрібній відстані до випромінювання лазера і до заданої площини. Відомий спосіб і пристрій для контролю лазерним променем глибини копання екскаватора (патент US № 4231700, 1980р.), який містить лазер для визначення своїм випромінюванням площини і вказівник для випромінювання лазера, що має електронно-оптичні приймачі, що прикріплені до верхнього вильоту стріли екскаватора. Випромінювання лазера визначає площину, по відношенню до якої і на певну сталу відстань від якої екскаватор заглиблює ківш. Вертикальний кут повороту верхнього вильоту стріли змінюють або вручну, керуючись сигналами від електронно-оптичного приймача, або автоматично за допомогою засобів для зміни вертикального кута повороту верхнього вильоту стріли екскаватора, що керовані сигналами з електронно-оптичного приймача. Відомий пристрій для автоматичного контролю глибини для нескінченного багатоковшового канавокопача (патент US № 4034490, 1977р.), до складу якого входить лазер для визначення своїм випромінюванням площини, по відношенню до якої і на певну сталу відстань від якої канавокопач заглиблює свій робочий орган, електронно-оптичні приймачі лазерного випромінювання, що жорстко закріплені на вершині стояка, який шарнірно прикріплений до рамки робочого органу канавокопача і має засоби для підтримування його в вертикальному положенні незалежно від кутового положення рамки, засоби для керування засобом живлення для зміни кута нахилу рамки робочого органу канавокопача. Візир електронно-оптичного приймача знаходиться в площині, визначеній випромінюванням лазера. В разі його відхилення від цієї площини, сигнали з електронно-оптичного приймача впливають на засіб для керування засобом живлення для зміни кута нахилу рамки робочого органу канавокопача до горизонту до тих пір, поки візир електронно-оптичного приймача знову не потрапить в площину, визначену випромінюванням лазера, при цьому робочий орган канавокопача переміститься на потрібну відстань в потрібному напрямку перпендикулярно площині, що визначена випромінюванням лазера. В основу корисної моделі поставлена задача розробити позиціонер для швидкого, точного, зручного встановлення робочої поверхні об'єкта позиціонування паралельно і на потрібній відстані до заданої площини. Поставлена задача вирішується тим, що позиціонер, відповідно до корисної моделі, складається з засобу для утримування об'єкта позиціонування, що являє собою принаймні один опорний стояк або принаймні один опорний стояк і принаймні один тримач, виконаний з можливістю утримування на принаймні одному опорному стояку, причому опорний стояк містить основу змінної дожини, яка має принаймні один профіль, принаймні один засіб для зміни довжини основи, поєднаний з принаймні одним її профілем, принаймні один пружний елемент, поєднаний з основою з можливістю деформації під дією засобу для зміни довжини основи, при цьому принаймні один опорний стояк містить принаймні два засоби для лінійного переміщення, що поєднані з протилежними кінцями його основи, з індикатора положення, що містить лазер, виконаний з можливістю визначення своїм випромінюванням площини під потрібним кутом до горизонту, та вказівник для випромінювання лазера, що розміщений або на об'єкті позиціонування і/або на об'єктах, що постійно пов'язані з ним, і/або на принаймні одному опорному стоякові і/або на засобах, що пов'язані з ним, з принаймні двох засобів для керування і регулювання роботи приводу, кожен з яких пов'язаний з відповідним засобом для лінійного переміщення опорного стояка і з вказівником для випромінювання лазера індикатора положення. В окремих конкретних формах виконання позиціонер характеризується тим, що основа змінної довжини опорного стояка може складатися з одного профілю і з принаймні одного засобу для зміни довжини основи, який поєднаний з профілем і може являти собою змінний по довжині елемент, який може бути виконаний в вигляді або лінійного елементу, який містить напрямну, рухому ланку, засіб для прямолінійного переміщення рухомої 7 ланки вздовж напрямної, який може мати або ручний привід, або механічний привід, або лінійного модуля, який містить напрямну, рухому ланку, засіб для прямолінійного переміщення рухомої ланки вздовж напрямної, який може мати або електричний привід, або гідропривід, або пневмопривід, або лінійного електродвигуна. Або основа опорного стояка може складатися з принаймні двох профілів, що виконані з можливістю прямолінійного переміщення один відносно одного або за рахунок наявності прямолінійних напрямних з геометричним замиканням між їх спряженими частинами, або за рахунок наявності прямолінійних напрямних з геометричним замиканням між спряженими частинами кожного з профілів та частинами принаймні одного третього тіла (зовнішньої муфти. внутрішньої втулки, з'єднувальних болтів тощо), і з принаймні одного засобу для зміни довжини основи, який поєднаний з профілями основи і може являти собою або механічну передачу: або передачу гнучкими тілами, або фрикційну передачу, або зубчату передачу, або гвинтову передачу, або важільний механізм, з або ручним, або механічним, або електричним приводом, або він може являти собою змінний по довжині елемент, що може бути виконаний в вигляді або лінійного елементу, який містить напрямну, рухому ланку, засіб для прямолінійного переміщення рухомої ланки вздовж напрямної, який може мати або ручний, або механічний привід, або лінійного модуля, який містить напрямну, рухому ланку, засіб для прямолінійного переміщення рухомої ланки вздовж напрямної, який може мати або ручний привід, або механічний привід, або електричний привід, або гідропривід, або пневмопривід, або лінійного електродвигуна, при цьому основа може містити ще принаймні один засіб для зміни довжини основи, який поєднаний з одним з її профілів і виконаний в вигляді змінного по довжині елементу. Засіб для зміни довжини основи може містити засіб для утримування, виконаний з можливістю кріплення або в певному, або в будь-якому місці до принаймні одного профілю основи. Привід засобу для зміни довжини основи може бути виконаний з можливістю здійснення або ручного керування, або керування засобом для керування і регулювання роботи приводу. Складові елементи засобу для зміни довжини основи можуть бути розміщені або зовні і/або всередині принаймні одного профілю основи опорного стояка. Додатково змінювати довжину основи опорного стояка можна принаймні одним додатковим профілем, який виконано з можливістю рознімного з'єднання і/або телескопічного розсування з принаймні одним її профілем. Профілі, що входять до складу основи, можуть бути виконані з різних матеріалів, мати різну форму і/або розміри поперечного перерізу, при цьому їх жорсткість повинна бути такою, щоб абсолютні значення пружних деформацій, що виникають в них під час навантажень, були менші заданих допустимих допусків на виконання тих чи інших робіт. Основа опорного стояка може місити принай 53824 8 мні один торцевий елемент, виконаний з пружного матеріалу, який має високий коефіцієнт тертя з опорною поверхнею. Пружний елемент опорного стояка може бути виконаний в вигляді або принаймні однієї пружини і/або принаймні однієї пластини з пружного матеріалу, і/або торцевих елементів, або в вигляді заповненого газом циліндра з поршнем. Пружний елемент може бути поєднаний або з принаймні одним профілем основи і/або з засобом для зміни довжини основи, або з засобом для лінійного переміщення. Засіб для лінійного переміщення може бути виконаний в вигляді або лінійного модуля, який складається з напрямної, з рухомої ланки, з засобу для прямолінійного переміщення рухомої ланки вздовж напрямної, механізм якого може мати або електромеханічний привід, або гідропривід, або пневмопривід, або в вигляді лінійного електродвигуна, що містить напрямну, рухому ланку, засіб для прямолінійного переміщення рухомої ланки вздовж напрямної, який має електромагнітний привід. Засіб для лінійного переміщення може складатися щонайменше або з двох лінійних модулів, або з двох лінійних електродвигунів, напрямні яких встановлено перпендикулярно одна до одної, при цьому напрямну або рухому ланку одного з них виконано з можливістю приєднання до основи опорного стояка, а до його рухомої ланки (напрямної) приєднано напрямну (рухому ланку) другого. Засіб для лінійного переміщення може містити торцевий елемент, що виконаний з пружного матеріалу, який має високий коефіцієнт тертя з опорною поверхнею. Складові елементи засобу для лінійного переміщення можуть бути розміщені або зовні на профілю основи і/або всередині пустотілого профілю основи, або на засобі для зміни довжини основи опорного стояка. Кожен засіб для лінійного переміщення виконаний з можливістю керування і регулювання роботи приводу засобу для прямолінійного переміщення рухомої ланки вздовж напрямної. Тримач може бути жорстко приєднаний до принаймні до одного профілю основи опорного стояка, або він може бути виконаний або з можливістю рознімного приєднання принаймні до одного профілю основи опорного стояка, або з можливістю безперешкодного прямолінійного переміщення вздовж принаймні одного профілю основи опорного стояка, при цьому або він може містити принаймні одну каретку, виконану з можливістю безперешкодного переміщення принаймні вздовж одного профілю основи опорного стояка та фіксації на ньому, або він являє собою принаймні одну каретку, що виконана з можливістю безперешкодного переміщення принаймні вздовж одного профілю основи опорного стояка та фіксації на ньому і з можливістю утримування об'єкта позиціонування. Каретка може містити засіб для переміщення каретки, який може мати привід, виконаний з можливістю здійснення ручного керування, або керування засобом для керування і регулювання роботи приводу. 9 Тримач може складатися з П-подібної металевої деталі, кожна з протилежних бічних сторін якої має наскрізний отвір з різзю, в який вгвинчено затискний гвинт, з металевої пластини, що приєднана до П-подібної деталі, з металевого упору, що утримується з можливістю прямолінійного переміщення металевою пластиною. Або тримач може являти собою або електромагніт, або пневмоутримувач, або профіль Z-подібної форми, до якого прикріплено принаймні один електромагніт і/або принаймні одну деталь із ПВХ. Або тримач може складатися з металевої пластини, що має два виступи - упори і три наскрізні отвори, два з яких виконано на її кінцях, з гумової пластини, що приєднана до металевої пластини, з важільного механізму, який шарнірно з'єднаний з металевою пластиною через наскрізні отвори на її кінцях і містить шарнірно з'єднані між собою важіль і скобу. Або тримач може складатися з Г-подібної деталі і з каретки з виступом, що мають спряжені частини для прямолінійного переміщення Г-подібної деталі вздовж каретки до упирання в виступ каретки. Засіб для утримування об'єкта позиціонування може мати поверхню, що повторює форму контактуючої з нею поверхні об'єкта позиціонування. Індикатор положення може містити або лінійний лазер, або ротаційний лазер, при цьому лазер індикатора положення може бути саморегульованим. Вказівник для випромінювання лазера може бути виконаний в вигляді візирної лінії, нанесеної на принаймні одну з бокових поверхонь об'єкта позиціонування або засобу для утримування об'єкта позиціонування паралельно його робочій поверхні і/або принаймні двох електронно-оптичних приймачів, кожен з яких має візир, що являє собою або один з країв світлочутливої зони, якщо електронно-оптичний приймач має лише одну світлочутливу зону, або візирну лінію, що розміщена між двома його світлочутливими зонами, або n-ну світлочутливу зону багатоелементного лінійного електронно-оптичного приймача. Електронно-оптичні приймачі можуть бути виконані з можливістю утримування на відстані один від одного або на об'єкті позиціонування і/або на об'єктах, що пов'язані з ним, і/або засобі для утримування об'єкта позиціонування і/або на засобах, що пов'язані з ним, так, що їх візирі знаходяться на однаковій відстані і паралельні до робочої поверхні об'єкта позиціонування і/або засобу для утримування об'єкта позиціонування. Електронно-оптичні приймачі можуть бути виконані з можливістю повороту навколо осі, що перпендикулярна площині, що визначена випромінюванням лазера індикатора положення. Кожен електронно-оптичний приймач виконаний з можливістю створення сигналу з його світлочутливої зони під дією випромінювання лазера індикатора положення. Засіб для керування і регулювання роботи приводу виконаний з можливістю вмикання/вимикання приводу засобу для прямолінійного переміщення рухомої ланки вздовж напрямної засобу для лінійного переміщення опорного стояка під дією сигналів, що створені пов'язаним з ним електронно-оптичним приймачем вказівника для 53824 10 випромінювання лазера. Лазер індикатора положення визначає площину під потрібним кутом до горизонту, паралельно і на потрібній відстані до заданої площини. Встановлюють робочу поверхню основи кожного опорного стояка засобу для утримування об'єкта позиціонування в одній площині, що паралельна і знаходиться на потрібній відстані до заданої площини, що досягається встановленням робочої поверхні основи кожного опорного стояка паралельно і на потрібній відстані до площини, що визначена випромінюванням лазера індикатора положення. Об'єкт позиціонування розміщують або на принаймні одному опорному стояку або на принаймні одному тримачі засобу для утримування об'єкта позиціонування до або після позиціонування робочої поверхні основи опорного стояка засобу для утримування об'єкта позиціонування так, що його робоча поверхня паралельна робочій поверхні основи опорного стояка, що забезпечує позиціонування об'єкта позиціонування паралельно і на потрібній відстані до заданої площини. Таке виконання позиціонера, засіб для утримування об'єкта позиціонування якого містить принаймні один опорний стояк, що складається з основи змінної довжини, і принаймні одного пружного елементу, що виконаний з можливістю деформації під дією засобу для зміни довжини основи, забезпечує швидке і зручне його встановлення між протилежними опорними поверхнями. Наявність засобу для лінійного переміщення, поєднаного з кінцем основи опорного стояка, обумовлює можливість переміщення кінця основи опорного стояка відносно опорної поверхні, на яку опирається вже встановлений між протилежними опорними поверхнями опорний стояк, наявність індикатора положення, що містить лазер і вказівник для випромінювання лазера, виконаний в вигляді візирної лінії і/або принаймні двох електронно-оптичних приймачів, візирі яких при переміщенні кінців основи потрапляють в площину, що визначена випромінюванням лазера індикатора положення, обумовлюють можливість швидкого, зручного, точного позиціонування робочої поверхні засобу для утримування об'єкта позиціонування, що забезпечує можливість швидкого, зручного, точного позиціонування об'єкта позиціонування. Виконання засобу для лінійного переміщення з можливістю переміщення його рухомих ланок в взаємно перпендикулярних напрямках дозволяє переміщувати кінець основи опорного стояка, встановленого між протилежними опорними поверхнями, і в поперечному, і в повздовжньому напрямках відносно опорної поверхні, що забезпечує можливість позиціонування об'єкта позиціонування в цих напрямках відносно заданої площини. Виконання лазера індикатора положення з можливістю визначення своїм випромінюванням площини під будь-яким потрібним кутом нахилу до горизонту дозволяє встановлювати робочу поверхню засобу для утримування об'єкта позиціонування під цим же кутом, що забезпечує позиціонування об'єкта позиціонування під цим же кутом. Ще більшу зручність позиціонування об'єкта позиціонування забезпечує виконання лазера індикатора положення з можливістю визна 11 чення своїм випромінюванням площини значних розмірів, що дозволяє виконувати позиціонування об'єкта позиціонування в будь-якому місці в межах цієї площини; виконання вказівника для випромінювання лазера в вигляді електронно-оптичних приймачів, що дозволяє проводити позиціонування об'єкта позиціонування незалежно від степені освітлення зони позиціонування і відстані до лазера, виконання електронно-оптичних приймачів з можливістю повороту навколо осі, що перпендикулярна до площини, визначеної випромінюванням лазера індикатора положення, що дозволяє проводити позиціонування об'єкта позиціонування в будь-якому місці в межах визначеної випромінюванням лазера площини без перестановки самого лазера. Виконання засобу для утримування об'єкта позиціонування з можливістю утримування об'єкта позиціонування навіть без участі робітника дозволяє збільшити жорсткість об'єкта позиціонування, що забезпечує ще більшу зручність, швидкість і точність позиціонування об'єкта позиціонування. Виконання засобів для утримування об'єкта позиціонування з можливістю утримування різних об'єктів позиціонування забезпечує достатність одного позиціонера для позиціонування різних об'єктів позиціонування, а також універсальність позиціонера при виконанні різних робіт. Автоматичне позиціонування робочої поверхні основи опорного стояка забезпечене виконанням засобів для лінійного переміщення з можливістю керування і регулювання роботи приводу засобу для прямолінійного переміщення рухомої ланки вздовж напрямної, виконанням електронно-оптичних приймачів вказівника для випромінювання лазера з можливістю створення з сигналу з їх світлочутливої зони під дією випромінювання лазера індикатора положення, виконанням засобів для керування і регулювання роботи приводу з можливістю вмикання/вимикання приводу засобу для прямолінійного переміщення рухомої ланки вздовж напрямної відповідного засобу для лінійного переміщення опорного стояка під дією сигналів з відповідного електронно-оптичного приймача вказівника для випромінювання лазера, що дозволяє автоматичним переміщенням рухомих ланок засобів для лінійного переміщення в потрібному напрямку і на потрібну відстань встановлювати робочу поверхню основи опорного стояка паралельно і на потрібній відстані до площини, що визначена випромінюванням лазера індикатора положення, при потраплянні візирів вказівника для випромінювання лазера в цю площину. Суть корисної моделі пояснюється кресленням, де на фіг. 1 показано схематичне зображення позиціонера в конкретній формі виконання; на фіг. 2 - загальний вигляд тримача в конкретній формі виконання; на фіг.3 - загальний вигляд тримача в конкретній формі виконання; на фіг.4 - розріз А- А з фіг. 3; на фіг.5 - загальний вигляд тримача в конкретній формі виконання. Креслення, що пояснює корисну модель, а також приклад конкретного виконання пристрою ніяким чином не обмежують обсяг домагань, викладених в формулі, а тільки пояснюють суть корисної моделі. Позиціонер в конкретній формі виконання 53824 12 складається з таких елементів. З засобу для утримування об'єкта позиціонування, який складається з опорного стояка, виконаного з можливістю утримування між протилежними опорними поверхнями, що містить основу змінної довжини, яка має профіль 1 і внутрішній профіль 2, що вкладений в профіль 1, засіб для зміни довжини основи (на фіг. не показано), який поєднаний з профілями 1 і 2 , пружний елемент (на фіг. не показано), що поєднаний і основою, два засоби для лінійного переміщення, кожен з яких має напрямну 3, рухому ланку 4, засіб для прямолінійного переміщення рухомої ланки вздовж напрямної, який має привід (на фіг. не показано), причому рухома ланка 4 одного з них поєднана з одним з кінців профілю 1 основи, а рухома ланка 4 другого - з одним з кінців внутрішнього профілю 2 основи, з тримачів 5, що поєднані з профілем 2 основи опорного стояка. З індикатора положення, що містить лазер (на фіг. не показано), виконаний з можливість визначення своїм випромінюванням 6 площини під потрібним кутом до горизонту, та вказівник для випромінювання лазера, що являє собою два електронно-оптичні приймачі 7, кожен з яких має візир 8 і приєднаний до рухомої ланки 4 відповідного засобу для лінійного переміщення, так, що їх візирі 8 знаходяться на однаковій відстані і паралельні площині робочої поверхні 9 основи опорного стояка. З двох засобів для керування і регулювання роботи приводу засобу для прямолінійного переміщення рухомої ланки вздовж напрямної засобу для лінійного переміщення (на фіг. не показано), що розміщені всередині пустотілого профілю 1 основи опорного стояка і пов'язані з відповідним засобом для лінійного переміщення опорного стояка і з відповідним електронно-оптичним приймачем 7 вказівника для випромінювання лазера. Позиціонер використовують так. На опорну поверхню 10 в потрібному місці встановлюють лазер індикатора положення і регулюють його так, що його випромінювання 6 визначає площину під потрібним кутом до горизонту паралельно і на потрібній відстані до заданої площини (на фіг. не показано). Засіб для утримування об'єкта позиціонування встановлюють в потрібному місці між протилежними опорними поверхнями 10 і 11. Для цього опорний стояк встановлюють на опорну поверхню 10 напрямною 3 одного з засобів для лінійного переміщення. Орієнтують опорний стояк так, щоб світлочутливі зони (на фіг. не показано) електронно-оптичних приймачів 7 потрапляли в площину, що визначена випромінюванням 6 лазера, і, використовуючи засіб для зміни довжини основи на протязі визначеного часу, змінюють довжину основи опорного стояка до тих пір, поки напрямні 3 засобів для лінійного переміщення не почнуть контактувати з протилежними опорними поверхнями 10 і 11, і стискають пружний елемент для надійного утримування опорного стояка між ними. Встановлюють робочу поверхню 9 основи опорного стояка паралельно і на потрібній відстані до площини, що визначена випромінюванням 6 лазера. Для цього вмикають засоби для керування і регулювання роботи приводу, які під дією сигналів з відповідних електронно-оптичних приймачів 7 13 вмикають приводи засобів для прямолінійного переміщення рухомої ланки вздовж напрямної відповідних засобів для лінійного переміщення, при цьому їх рухомі ланки 4 переміщуються в такому напрямку, що візир 8 кожного електроннооптичного приймача 7 рухається в напрямку площини, що визначена випромінюванням 6 лазера. При потраплянні візира 8 електронно-оптичного приймача 7 в цю площину, сигнал з електроннооптичного приймача 7 змінюється, що приводить до вимикання приводу засобу для прямолінійного переміщення рухомої ланки вздовж напрямної відповідним засобом для керування і регулювання роботи привода і рухома ланка 4 засобу для лінійного переміщення припиняє свій рух. На тримачі 5 встановлюють об'єкт позиціонування 12 так, що його робоча поверхня 13 паралельна робочій поверхні 9 основи опорного стояка. Таким чином робочу поверхню 13 об'єктапозиціонування 12 встановлено паралельно і на потрібній відстані до площини, що визначена випромінюванням 6 лазера індикатора положення і до заданої площини. Тримач 5 може являти собою або електромагніт, або пневмоутримувач (на фіг. не показано). Або тримач 5 може складатися з металевої Пподібної деталі 14, на кожній з протилежних бічних сторін 15 якої виконано наскрізний отвір з різзю (на фіг. не показано), в який вгвинчено затискний 53824 14 гвинт 16, з металевої пластини 17, що приєднана до П-подібної деталі 14, з металевого упору 18, що утримується з можливістю прямолінійного переміщення металевою пластиною 17. Або тримач 5 може складатися з Г-подібної деталі 19, з каретки 20 з виступом 21, які мають спряжені частини для прямолінійного переміщення Г-подібної деталі 19 вздовж каретки 20 до впирання її в виступ 21. Або тримач 5 може складатися з металевої пластини 22 з виступами-упорами 23, яка має наскрізний отвір 24 і два наскрізні отвори 25, виконані на її кінцях, з гумової пластини 26, що приєднана до металевої пластини 22, з важільного механізму, який шарнірно з'єднаний з металевою пластиною 22 через наскрізні отвори 25, який містить шарнірно з'єднані між собою важіль 27 і скобу 28 для притискання об'єкта позиціонування, наприклад CD-профілю 29, до гумової пластини 26. Засіб для лінійного переміщення в описаній вище формі виконання позиціонера являє собою або лінійний модуль, або лінійний електродвигун. Лазер індикатора положення об'єкта позиціонування являє собою або лінійний лазер, або ротаційний лазер, при цьому він може бути саморегульованим. Електронно-оптичні приймачі можуть бути виконані з можливістю повороту навколо осі, що перпендикулярна площині, визначеній випромінюванням лазера індикатора положення. 15 53824 16 17 Комп’ютерна верстка А. Крулевський 53824 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPositioner
Автори англійськоюLehkyi Serhii Ivanovych, Lehka Natalia Vasylivna
Назва патенту російськоюПозиционер
Автори російськоюЛегкий Сергей Иванович, Легкая Наталия Васильевна
МПК / Мітки
МПК: B25J 13/08, E04G 21/18, B25J 19/00
Мітки: позиціонер
Код посилання
<a href="https://ua.patents.su/9-53824-pozicioner.html" target="_blank" rel="follow" title="База патентів України">Позиціонер</a>
Позиціонер
Номер патенту: 52077
Опубліковано: 10.08.2010
Автори: Легкий Сергій Іванович, Легка Наталія Василівна
МПК: B25J 13/08, E04G 21/18, B25J 19/00
Мітки: позиціонер
Формула / Реферат:
1. Позиціонер, який відрізняється тим, що складається з принаймні двох розміщених на відстані суміжних засобів для лінійного переміщення, кожен з яких виконаний з можливістю утримування на нерухомій опорі, з можливістю утримування об'єкта позиціонування або засобу для утримування об'єкта позиціонування, з індикатора положення, що містить лазер, виконаний з можливістю визначення своїм випромінюванням площини під потрібним кутом до горизонту,...
Позиціонер
Номер патенту: 52076
Опубліковано: 10.08.2010
Автори: Легка Наталія Василівна, Легкий Сергій Іванович
МПК: B25J 13/08, B25J 19/00, E04G 21/18, B23Q 15/00
Мітки: позиціонер
Формула / Реферат:
1. Позиціонер, який відрізняється тим, що складається з принаймні двох розміщених на відстані суміжних засобів для лінійного переміщення, кожен з яких виконаний з можливістю утримування на нерухомій опорі, з можливістю утримування об'єкта позиціонування або засобу для утримування об'єкта позиціонування, з індикатора положення, який містить лазер, виконаний з можливістю визначення своїм випромінюванням площини під потрібним кутом до...
Позиціонер
Номер патенту: 52078
Опубліковано: 10.08.2010
Автори: Легка Наталія Василівна, Легкий Сергій Іванович
МПК: B25J 13/08, E04G 21/18, B25J 19/00
Мітки: позиціонер
Формула / Реферат:
1. Позиціонер, який відрізняється тим, що складається з засобу для утримування об'єкта позиціонуваня, що виконаний з можливістю утримування між протилежними опорними поверхнями і з можливістю утримування об'єкта позиціонування, з індикатора положення, що містить лазер, виконаний з можливістю визначення своїм випромінюванням площини під потрібним кутом до горизонту, та вказівник для випромінювання лазера, що розміщений або на об'єкті...
Опорний стояк

Номер патенту: 53823
Опубліковано: 25.10.2010
Автори: Легкий Сергій Іванович, Легка Наталія Василівна
МПК: E04G 25/00, E04F 21/00
Формула / Реферат:
1. Опорний стояк, який складається з основи змінної довжини, що містить принаймні один профіль, принаймні один засіб для зміни довжини основи, поєднаний з принаймні одним її профілем, з принаймні одного пружного елемента, який поєднаний з основою з можливістю деформації під дією засобу для зміни довжини основи, який відрізняється тим, що додатково містить принаймні один засіб для лінійного переміщення, який поєднаний з одним з кінців...
Пристрій для вирівнювання поверхні

Номер патенту: 52088
Опубліковано: 10.08.2010
Автори: Легка Наталія Василівна, Легкий Сергій Іванович
МПК: E04F 21/00
Мітки: поверхні, пристрій, вирівнювання
Формула / Реферат:
1. Пристрій для вирівнювання поверхні, який характеризується тим, що складається з позиціонера і з засобу для вирівнювання, при цьому позиціонер складається з засобу для утримування засобу для вирівнювання, що містить або принаймні два розміщені на відстані опорні стояки, кожен з яких виконаний з можливістю утримування між протилежними опорними поверхнями, або принаймні два розміщені на відстані направляючі стояки, кожен з яких поєднаний з...
Попередній патент: Опорний стояк
Наступний патент: Пристрій для вирівнювання поверхні
Випадковий патент: М'ясовмісні напівфабрикати січені "сумські"